基于单片机电子秤硬件电路设计

基于单片机电子秤硬件电路设计
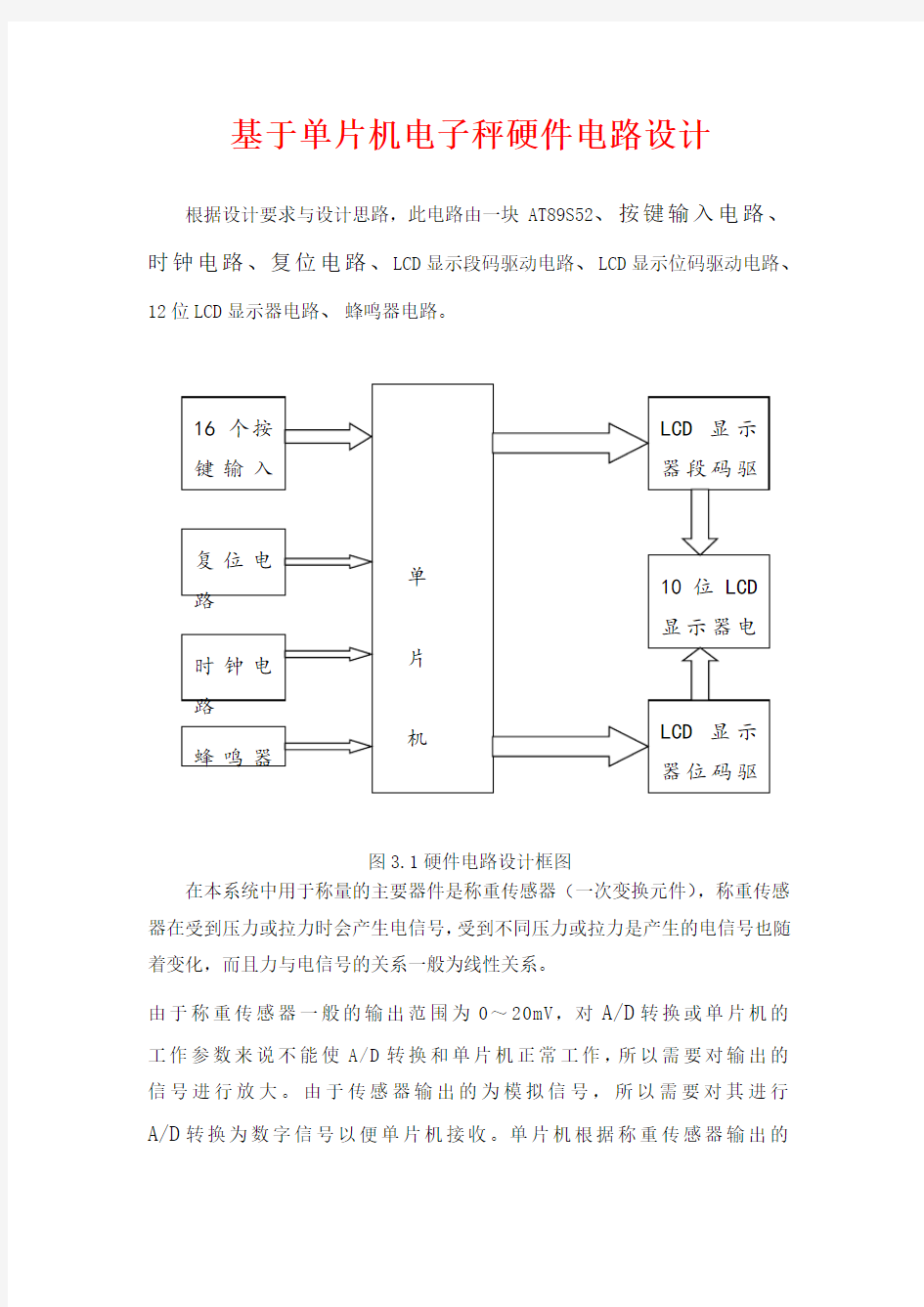
根据设计要求与设计思路,此电路由一块AT89S52、按键输入电路、时钟电路、复位电路、LCD显示段码驱动电路、LCD显示位码驱动电路、12位LCD显示器电路、蜂鸣器电路。
图3.1硬件电路设计框图
在本系统中用于称量的主要器件是称重传感器(一次变换元件),称重传感器在受到压力或拉力时会产生电信号,受到不同压力或拉力是产生的电信号也随着变化,而且力与电信号的关系一般为线性关系。
由于称重传感器一般的输出范围为0~20mV,对A/D转换或单片机的工作参数来说不能使A/D转换和单片机正常工作,所以需要对输出的信号进行放大。由于传感器输出的为模拟信号,所以需要对其进行A/D转换为数字信号以便单片机接收。单片机根据称重传感器输出的
电信号和速度传感器输出的速度信号计算出物体的重量。
在本系统中,硬件电路的构成主要有以下几部分: AT89C52的最小系统构成、电源电路、数据采集、人-机交换电路等。
3.1 AT89S52的最小系统电路
3.1.1单片机芯片AT89S52介绍
单片机采用MCS-51系列单片机。由ATMEL公司生产的AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。在单芯片上,拥有灵巧的8 位CPU 和在线系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提供高灵活、有效的解决方案。AT89S52具有以下标准功能: 8k字节Flash,256字节RAM,32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路。空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。而且,它还具有一个看门狗(WDT)定时/计数器,如果程序没有正常工作,就会强制整个系统复位,还可以在程序陷入死循环的时候,让单片机复位而不用整个系统断电,从而保护你的硬件电路。
AT89S52有40个引脚,32个外部双向输入/输出(I/O)端口,同时内含2个外中断口,2个16位可编程定时计数器,2个全双工串行通信口,片上Flash允许程序存储器在系统可编程,亦适于常规编程器。其将通用的微处理器和Flash存储器结合在一起,特别是可反复擦写的Flash存储器可有效地降低开发成本。其芯片引脚图如上图所示。
图3.2 AT89S52引脚图
3.1.2.单片机管脚说明
VCC:供电电压。
GND:接地。
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门流。当P1口的管脚第一次写1时,被定义为高阻输入。P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。在FIASH编程时,P0 口作为原码输入口,当FIASH 进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL门电流。P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。在FLASH编程和校验时,P1口作为第八位地址接收。
P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。并因此作为输入时,P2口的管脚被外部拉低,将输出电流。这是由于内部上拉的
缘故。P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。P2口在FLASH 编程和校验时接收高八位地址信号和控制信号。
P3口:P3口管脚是8个带内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这是由于上拉的缘故。
P3口也可作为AT89S52的一些特殊功能口,如下表所示:
表3.1 P3.0口引脚功能表
P3口同时为闪烁编程和编程校验接收一些控制信号。
RST:复位输入。当振荡器复位器件时,要保持RST脚两个机器周期的高电平时间。
ALE/PROG:当访问外部存储器时,地址锁存允许的输出电平用于锁存地址的地位字节。在FLASH编程期间,此引脚用于输入编程脉冲。在平时,ALE端以不变的频率周期输出正脉冲信号,此频率为振荡器频率的1/6。因此它可用作对外部输出的脉冲或用于定时目的。然而要注意的是:每当用作外部数据存储器时,将跳过一个ALE脉冲。如想禁止ALE的输出可在SFR8EH地址上置0。此时, ALE只有
在执行MOVX,MOVC指令是ALE才起作用。另外,该引脚被略微拉高。如果微处理器在外部执行状态ALE禁止,置位无效。
/PSEN:外部程序存储器的选通信号。在由外部程序存储器取指期间,每个机器周期两次/PSEN有效。但在访问外部数据存储器时,这两次有效的/PSEN信号将不出现。
/EA/VPP:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器。注意加密方式1时,/EA将内部锁定为RESET;当/EA 端保持高电平时,此间内部程序存储器。在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。
XTAL1:反向振荡放大器的输入及内部时钟工作电路的输入。
XTAL2:来自反向振荡器的输出。
3.1.3 AT89S52的最小系统电路构成
AT89S52单片机的最小系统由时钟电路、复位电路、电源电路及单片机构成。单片机的时钟信号用来提供单片机片内各种操作的时间基准,复位操作则使单片机的片内电路初始化,使单片机从一种确定的初态开始运行。
单片机的时钟信号通常用两种电路形式得到:内部振荡方式和外部振荡方式。在引脚XTAL1和XTAL2外接晶体振荡器(简称晶振)或陶瓷谐振器,就构成了内部振荡方式。由于单片机内部有一个高增益反相放大器,当外接晶振后,就构成了自激振荡器并产生振荡时钟脉冲。
当MCS-5l系列单片机的复位引脚RST(全称RESET)出现2个机器周期以上的高电平时,单片机就执行复位操作。如果RST持续为高电平,单片机就处于循环复位状态。根据应用的要求,复位操作通常有两种基本形式:上电复位和上电或开关复位。上电复位要求接通电源后,自动实现复位操作。
上电或开关复位要求电源接通后,单片机自动复位,并且在单片机运行期间,用开关操作也能使单片机复位。单片机的复位操作使单片机进入初始化状态,其中包括使程序计数器PC=0000H,这表明程序从0000H地址单元开始执行。
系统复位是任何微机系统执行的第一步,使整个控制芯片回到默认的硬件状态下。51单片机的复位是由RESET引脚来控制的,此引脚与高电平相接超过24个振荡周期后,51单片机即进入芯片内部复位状态,而且一直在此状态下等待,
直到RESET引脚转为低电平后,才检查EA引脚是高电平或低电平,若为高电平则执行芯片内部的程序代码,若为低电平便会执行外部程序。
3.2 电源电路设计
根据设计需要,本系统中需要设计两种不同级别的电源,即传感器需要+12V 的电源,而系统其他芯片使用的是+5V电源。考虑本次设计的实际要求,使系统稳定工作,提高产品的性价比,电源电路的设计决定采用如下方案:
图3.3 电源电路图
220V的交流电经过变压器后输出15V的电压,经整流滤波电路后,通过LM7812和LM7905进行DC/DC变换得到+12V和+5V、-5V供器和系统的其他芯片使用。在变压器的原边加入熔断保护装置和MFC网络,使得系统获得的电源更稳定,效果更好,且电路短路时,熔断装置会迅速切断电源,保护其他电路元件不被损坏,供电电路如图3.3所示。
3.3 数据采集部分电路设计
数据采集部分电路包括传感器输出信号放大电路、A/D转换器与单片机接口电路。
3.3.1 传感器和其外围以及放大电路设计
传感器实际上是一种将质量信号转变为可测量的电信号输出的装置。用传
感器首先要考虑传感器所处的实际工作环境,这点对正确使用传感器至关重要,它关系到传感器能否正常工作以及它的安全和使用寿命,乃至整个衡器的可靠性和安全性。因此传感器外围电路的抗干扰能力是数据采集部分电路设计的关键环节。
传感器检测电路的功能是把电阻应变片的电阻变化转变为电压输出,由于惠斯登电桥具有很多优点,如可以抑制温度变化的影响,可以抑制侧向力干扰,可以比较方便的解决称重传感器的补偿问题等,又因为全桥式等臂电桥的灵敏度最高,各臂参数一致,各种干扰的影响容易相互抵消,所以在本设计中选用最终方案我们选择的是上海开沐自动化有限公司生产的NS-TH1系列称重传感器,额定载荷20Kg,该称重传感器均采用全桥式等臂电桥。
由于传感器输出的电压信号很小,是mV级的电压信号,因此为了提高系统的抗干扰能力,在传感器外围电路的设计过程中,增加了由普通运放设计的差动放大器增益调节电阻Rg选用10K 电阻,是为了满足系统抗干扰的要求而设计。其电路图如3.2所示。
图3.2传感器和其外围电路图
这是一个电阻应变片式称重传感器,将电阻应变片贴在金属的弹性体(即力敏感器)上,并连接成一差动全桥电路。电阻应变片实心轴沿轴向线应变为:
l l
l
?=
ε
(3-1)
实心轴沿圆周向线应变为:
r r
r ?=
ε (3-2)
金属材料的电阻相对变化公式为:
()[]εεπμK E R dR
R R =++=≈?21 (3-3)
把3-1、3-1代入3-3可以得到其输出电压为:
()AE F U μ+=
12kU
0 (3-4)
其中F 为压力(即重物重量)A 为受力面积E 为弹性材料的弹性模量。如果在电阻的两侧都加入应变片,则其输出为
F
h Eb l
kU
kU U 2006==ε (3-5)
SP20C-G501的输出电压为1-5V 相应压力为1-50KPa 。供电电流变动会直接影响传感器的输出电压,因此希望电流变动要小。此外,增大或减小驱动电流可调整输出电压,但电流过小,输出电压降低同时抗噪声能力减弱;电流过大,会使传感器发热等,将对传感器特性影响加大。因此在电路中使用1mA 的驱动电流。即使用的电流为1mA 左右。电路中,采用通用运算放大器LM324,由稳态二极管VS 提供2.5V 的输出电压经电阻R 2和R 3分压得到基准电压,作为运放A 1输入电压,并供给1mA 的电流。传感器的驱动电流流过基准电阻R 4,其上的压降等于输入电压。
R 13和R 14为失调电压的温度补偿电阻,阻值选择500k Ω-1.5M Ω。输入采用高输入阻抗的差动输入方式,再有差动放大器电路进行放大,输出1-5V 的电压。RP 2用于调整电路输入的灵敏度,RP 1用于失调电压的调整,调整时,压力为0KPa 时输出电压为1V ,调整RP 1,当压力为达到20Kg 的力时,输出电压为5V 即可。
而有式(3-5)得三运放放大电路的输出信号与输入信号的关系式为:
()21123
4021U U R R R R U -???? ?
?+-
= (3-6)
通过上式可以看出,放大系数为
???? ?
?+-
=123421R R R R K (3-7)
代入数值可以计算出,其放大系数在70~150之间,完全符合设计要求。
有(3-6)可以得到电桥输入电压U 0与被测重量x 成正比,即
r
U xK U 00= (3-8)
式中:r U ——电桥的电源电压 0K ——传感器系数
3.3.2 A/D 转换芯片与AT89S52单片机接口电路设计
AD574是美国Analog Device 公司生产的12位单片A/D 转换器。它采用逐次逼近型的A/D 转换器,最大转换时间为25us ,转换精度为0.05%,所以适合于高精度的快速转换采样系统。芯片内部包含微处理器借口逻辑(有三态输出缓冲器),故可直接与各种类型的8位或者16位的微处理器连接,而无需附加逻辑接口电路,切能与CMOS 及TTL 电路兼容。AD574采用28脚双列直插标准封装,其引脚图如下:
图3.5 AD574管脚图
A/D574有5根控制线,逻辑控制输入信号有:
A0:字节选择控制信号。
CE:片启动信号。
/CS:片选信号。当/CS=0,CE=1同时满足时,AD574才处于工作状态,否则工作被禁止。
R/-C:读数据/转换控制信号。
12/-8:数据输出格式选择控制信号。当其为高电平时,对应12位并行输出;为低电平时,对应8位输出。
当R/-C=0,启动A/D转换:当A0=0,启动12位A/D转换方式;当A0=1,启动8位转换方式。
当R/-C=1,数据输出,A0=0时,高8位数据有效;A0=1时,低4位数据有效,中间4位为0,高4位为三态。
输出信号有:
STS:工作状态信号线。当启动A/D进行转换时,STS为高电平;当A/D转换结束时为低电平。则可以利用此线驱动一信号二极管的亮灭,从而表示是否处于A/D转换。
其它管脚功能如下:
10Vin,20Vin:模拟量输入端,分别为10V和20V量程的输入端,信号的另一端接至AGND。
DB11~DB0:12位数字量输出端,送单片机进行数据处理。
REF OUT :10V内部参考电压输出端。
REF IN :内部解码网络所需参考电压输入端。
BIP OFF :补偿校正端,接至正负可调的分压网络,0输入时调整数字输出为0;
AGND:接模拟地。
DGND:接数字地。
由于对AD574 8、10、12引脚的外接电路有不同连接方式,所以AD574与单片机的接口方案有两种,一种是单极性接法,可实现输入信号0~10V或者0~20V的转换;另一种为双极性接法,可实现输入信号-5~+5V或者-10~+10V之
间转换。
我们采用单极性接法,电路接线图如下图3-4所示:
图3.6 AD574与AT89S52的接线图
根据芯片管脚的原理,无论启动、转换还是结果输出,都要保证CE端为高电平,所以可以将单片机的/RD引脚和/WR端通过与非门与AD574的CE端连接起来。转换结果分高8位、低4位与P0口相连,分两次读入,所以12/-8端接地。同时,为了使CS、A0、R/-C在读取转换结果时保持相应的电平,可以将来自单片机的控制信号经74LS373锁存后再接入。CPU可采用中断、查询或者程序延时等方式读取AD574的转换结果,本设计采用中断方式,则将转换结束状态STS 端接到P3.2(外部中断/INT0)。其工作过程如下:
A.当单片机执行对外部数据存储器的写指令,并使CE=1,/CS=0,R/-C=0,A0时,
进行12位A/D转换启动。
B.CPU 等待STS 状态信号送P3.2口,当STS 由高电平变为低电平时,就表示转换结束。转换结束后,单片机通过分两次读外部数据存储器操作,读取12位的转换结果数据。
C.当CE=1,/CS=0,R/-C=1,A0=0时,读取高8位;当CE=1,/CS=0,R/-C=1,A0=1时,读取低4位。
3.3.3 测量算法
A/D 转换结果D 与被测量x 存在以下关系:
FS m
D U XSK
D = (3-9)
式中:S ——传感器及其测量电路的灵敏度(即被测量X 转换成电压U 的转换系数)
K ——放大器的放大倍数
m U ——A/D 转换器满量程输入电压 FS D ——A/D 转换器满量程输出数字 而被测量X 总是以其测量数字N 和测量单位x 1表示
N x X 1= (3-10)
将式(3-10)代入(3-9)得
N
D U SK x D FS
m 1= (3-11)
由上式可见只要满足以下条件 11=FS
m D U SK
x (3-12)
就可以使A/D 转换结果D 与被测量x 的数值N 相等,即D=N ,在这种情况下将A/D 转换结果作为被测量的数值传送到显示器显示出来。
3.4显示电路与AT89S52单片机接口电路设计
在2.3显示电路论证中,本设计采用是LCD 显示。在LCD 驱动时,需在段电极和公共电极上施加交流电压。若只在电极上施加DC 电压时,液晶本身发生劣化。液晶驱动方式包括静态驱动、动态驱动等驱动方式。 (1)静态驱动
所有的段都有独立的驱动电路,表示段电极与公共电极之间连续施加电压。它适合于简单控制的LCD。
(2)多路驱动方式
构成矩阵电极,公共端数为n,按照1/n的时序分别依次驱动公共端,与该驱动时序相对应,对所有的段信号电极作选择驱动。这种方式适合于比较复杂控制的LCD。
在多路驱动方式中,像素可分为选择点、半选择点和非选择点。为了提高显示的对比度和降低串扰,应合理选择占空比(duty)和偏压(bias)。
施加在LCD上所表示的ON和OFF时的电压有效值与占空比和偏压的关系如下:
Vo:LCD驱动电压
N:占空比(1/N)
a:偏压(1/a)
多路驱动方式可分为点反转驱动和帧反转驱动。点反转驱动适合于低占空比应用,它在各段数据输出时,将数据反转。帧反转驱动适合于高占空比应用,它在各帧输出时,将数据反转。
对于多灰度和彩色显示的控制方法,通常采用帧频控制(FRC)和脉宽调制(PWM)方法。帧频控制是通过减少帧输出次数,控制输出信号的有效值,来实现多灰度和彩色控制。而脉宽调制是通过改变段输出信号脉宽,控制输出信号的有效值,来实现多灰度和彩色控制。
如图3.7所示。
图3.7
3.5键盘电路与AT89S52单片机接口电路设计
矩阵式键盘的结构与工作原理:在键盘中按键数量较多时,为了减少I/O 口的占用,通常将按键排列成矩阵形式。在矩阵式键盘中,每条水平线和垂直线在交叉处不直接连通,而是通过一个按键加以连接。这样,一个端口(如P1口)就可以构成4*4=16个按键,比之直接将端口线用于键盘多出了一倍,而且线数越多,区别越明显,比如再多加一条线就可以构成20键的键盘,而直接用端口线则只能多出一键(9键)。由此可见,在需要的键数比较多时,采用矩阵法来做键盘是合理的。
矩阵式键盘的按键识别方法:确定矩阵式键盘上何键被按下介绍一种“行扫描法”。行扫描法行扫描法又称为逐行(或列)扫描查询法,是一种最常用的按键识别方法,如上图所示键盘,介绍过程如下。判断键盘中有无键按下将全部行线Y0-Y3置低电平,然后检测列线的状态。只要有一列的电平为低,则表示键盘中有键被按下,而且闭合的键位于低电平线与4根行线相交叉的4个按键之中。若所有列线均为高电平,则键盘中无键按下。判断闭合键所在的位置在确认有键按下后,即可进入确定具体闭合键的过程。其方法是:依次将行线置为低电平,
EA/VP 31X119X2
18
RESET
9
RD 17WR 16INT012
INT113T014T115P101P112P123P134P145P156P167P178P0039P0138P0237P0336P0435P0534P0633P07
32
P2021P2122P2223P23
24
P2425P2526P2627P2728PSEN 29ALE/P
30
TXD 11RXD
10AT89S52
VCC
12
3
U2
AND
R3
4&1K
3.6报警电路的设计
图3.9报警电路图
当电路检测到称重的物体超过仪器的测量限制时,将产生一个信号给报警电路。使报警电路报警从而提醒工作人员注意,超限报警电路如图3.9所示。
它是有89S52的P2.6口来控制的,当超过设置的重量时(5Kg),通过程序使P2.6口值为高电平,从而使三极管导通,报警电路接通,使蜂鸣器SPEAKER 发出报警声,同时使报警灯LED发光。由于持续的声音不能够引起人们的关注,所以本系统的报警电路采用间断的声音和频闪的灯光来实现。这一任务的实现主要靠程序来完成,在此不再赘述。
第四章系统软件设计
程序设计是一件复杂的工作,为了把复杂的工作条理化,就要有相应的步骤和方法。其步骤可概括为以下三点:
⑴分析系统控制要求,确定算法:对复杂的问题进行具体的分析,找出合理的计算方法及适当的数据结构,从而确定编写程序的步骤。这是能否编制出高质量程序的关键。
⑵根据算法画流程图:画程序框图可以把算法和解题步骤逐步具体化,以减少出错的可能性。
⑶编写程序:根据程序框图所表示的算法和步骤,选用适当的指令排列起来,
构成一个有机的整体,即程序。
程序数据的一种理想方法是结构化程序设计方法。结构化程序设计是对利用到的控制结构类程序做适当的限制,特别是限制转向语句(或指令)的使用,从而控制了程序的复杂性,力求程序的上、下文顺序与执行流程保持一致性,使程序易读易理解,减少逻辑错误和易于修改、调试。根据系统的控制任务,本系统的软件设计主要由主程序、初始化程序、显示子程序、数据采集子程序和延时程序等组成。
4.1主程序设计
图4.1 系统主程序流程图
系统上电后,初始化程序将RAM 的30H~5FH内存单元清零,
P2.6引脚置成低电平,防止误报警。
主程序模块主要完成编程芯片的初始化及按需要调用各模块(子程序),在系统初始化过程中,将系统设置成5Kg量程,并写5Kg量程标志。设计流程图如图4.1所示。
4.2 子程序设计
系统子程序主要包括A/D转换启动及数据读取程序设计、键盘输入控制程序设计、显示程序设计、以及中断程序设计等。
4.2.1 A/D转换启动及数据读取程序设计
A/D转换子程序主要是指在系统开始运行时,把称重传感器传递过来的模拟信号转换成数字信号并传递到单片机所涉及到的程序设计。设计流程图如图4-2所示。
4.2 A/D转换启动及数据读取程序流程图
500g
图4.3 数据处理流程图
4.2.3显示子程序设计
显示子程序主要是来判断是否需要显示,以及如何去显示,也是十分重要的程序之一。而显示子程序是其他程序所需要调用的程序之一,因此,显示子程序的设计就显得举足轻重,设计的时候也要十分的小心和卖力。设计显示子程序的流程图如下图4-4所示:
图4.4显示子程序流程图
4.2.4 键盘扫描子程序的设计
如图3.4.1所示:键盘电路设计成4X4矩阵式,由键盘编码方式可以得出0,1,2,3,4,5,6,7,8,9,A,B,C,D,E各键对应的键值:
0D8H,0D0H,0D1H,0D2H,0C8H,0C9H,0CAH,0C0H,0C1H, 0C2H,
0C3H,0CBH,0D3H,0DBH,0DAH,0D9H 。
在程序中可以先判断按键编码,然后根据编码将键盘代表的数值送到相应的存储单元,再进行功能选择或数据处理。
最新单片机硬件系统设计原则
单片机硬件系统设计 原则
●单片机硬件系统设计原则 ●一个单片机应用系统的硬件电路设计包含两部分内容:一是系统扩展,即单片机内部的功能单 元,如ROM、RAM、I/O、定时器/计数器、中断系统等不能满足应用系统的要求时,必须在片外进行扩展,选择适当的芯片,设计相应的电路。二是系统的配置,即按照系统功能要求配置外围设备,如键盘、显示器、打印机、A/D、D/A转换器等,要设计合适的接口电路。 ●系统的扩展和配置应遵循以下原则: ● 1、尽可能选择典型电路,并符合单片机常规用法。为硬件系统的标准化、模块化打下良好的基 础。 ● 2、系统扩展与外围设备的配置水平应充分满足应用系统的功能要求,并留有适当余地,以便进行 二次开发。 ● 3、硬件结构应结合应用软件方案一并考虑。硬件结构与软件方案会产生相互影响,考虑的原则 是:软件能实现的功能尽可能由软件实现,以简化硬件结构。但必须注意,由软件实现的硬件功能,一般响应时间比硬件实现长,且占用CPU时间。 ● 4、系统中的相关器件要尽可能做到性能匹配。如选用CMOS芯片单片机构成低功耗系统时,系统 中所有芯片都应尽可能选择低功耗产品。 ● 5、可靠性及抗干扰设计是硬件设计必不可少的一部分,它包括芯片、器件选择、去耦滤波、印刷 电路板布线、通道隔离等。 ● 6、单片机外围电路较多时,必须考虑其驱动能力。驱动能力不足时,系统工作不可靠,可通过增 设线驱动器增强驱动能力或减少芯片功耗来降低总线负载。 ● 7、尽量朝“单片”方向设计硬件系统。系统器件越多,器件之间相互干扰也越强,功耗也增大, 也不可避免地降低了系统的稳定性。随着单片机片内集成的功能越来越强,真正的片上系统SoC已经可以实现,如ST公司新近推出的μPSD32××系列产品在一块芯片上集成了80C32核、大容量FLASH 存储器、SRAM、A/D、I/O、两个串口、看门狗、上电复位电路等等。 ●单片机系统硬件抗干扰常用方法实践 ●影响单片机系统可靠安全运行的主要因素主要来自系统内部和外部的各种电气干扰,并受系统结 构设计、元器件选择、安装、制造工艺影响。这些都构成单片机系统的干扰因素,常会导致单片机系统运行失常,轻则影响产品质量和产量,重则会导致事故,造成重大经济损失。 ●形成干扰的基本要素有三个: ●(1)干扰源。指产生干扰的元件、设备或信号,用数学语言描述如下:du/dt, di/dt大的地 方就是干扰源。如:雷电、继电器、可控硅、电机、高频时钟等都可能成为干扰源。 ●(2)传播路径。指干扰从干扰源传播到敏感器件的通路或媒介。典型的干扰传播路径是通过导线 的传导和空间的辐射。 ●(3)敏感器件。指容易被干扰的对象。如:A/D、 D/A变换器,单片机,数字IC,弱信号放大器 等。 ● 1 干扰的分类 ● 1.1 干扰的分类 ●干扰的分类有好多种,通常可以按照噪声产生的原因、传导方式、波形特性等等进行不同的分 类。按产生的原因分: ●可分为放电噪声音、高频振荡噪声、浪涌噪声。 ●按传导方式分:可分为共模噪声和串模噪声。 ●按波形分:可分为持续正弦波、脉冲电压、脉冲序列等等。 ● 1.2 干扰的耦合方式
单片机电子秤设计报告完整版样本
单片机电子秤设计报告 秤是一种在实际工作和生活中经常见到的测量器具。随着计量技术和电子技术的发展, 传统纯机械结构的杆秤、台秤、磅秤等称量装置逐步被淘汰, 电子称量装置电子秤、电子天平等以其准确、快速、方便、显示直观等诸多优点而受到人们的青睐。 和传统秤相比较, 电子秤利用新型传感器、高精度AD转换器件、单片机设计实现, 具有精度高、功能强等特点。本课题设计的电子秤具有基本称重、键盘输入、计算价格、显示、超重报警功能。该电子秤的测量范围为0-10Kg, 测量精度达到5g, 有高精度, 低成本, 易携带的特点。电子秤采用液晶显示汉字和测量记过, 比传统秤具有更高的准确性和直观性。另外, 该电子秤电路简单, 使用寿命长, 应用范围广, 能够应用于商场、超市、家庭等场所, 成为人们日常生活中不可少的必须品。 一、功能描述 1、采用高精度电阻应变式压力传感器, 测量量程0-10kg, 测量精度可达5g。 2、采用电子秤专用模拟/数字( A/D) 转换器芯片hx711对传感器信号进行调理转换, HX711 采用了海芯科技集成电路专利技术, 是一款专为高精度电子秤而设计的24 位A/D 转换器芯片。 3、采用STC89C52单片机作为主控芯片, 实现称重、计算
价格等主控功能。 4、采用128*64汉字液晶屏显示称重重量、单价、总价等信息。 5、采用4*4矩阵键盘进行人机交互, 键盘容量大, 操作便捷。 6、具有超量程报警功能, 能够经过蜂鸣器和LED灯报警。 7、系统经过USB电源供电, 单片机程序也可经过USB线串行下载。 二、硬件设计 1、硬件方案 单片机电子秤硬件方案如图1所示: 图1 单片机电子秤硬件方案
基于单片机的语音播报电子秤设计
1 引言 在生活中我们经常需要用秤来测量物体的重量,由于秤在我们日常生活中的应用十分广泛,我们对其的设计要求就需要操作方便、易于识别。随着计量技术和电子技术的发展,传统纯机械结构的杆秤、台秤、磅秤等称量装置逐步被淘汰,电子称量装置电子秤、电子天平等以其准确、快速、方便、显示直观等诸多优点而受到人们的青睐。电子秤向提高精度和降低成本方向发展的趋势引起了对低成本、高性能模拟信号处理器件需求的增加。 1.1 称重技术的发展与成果 电子称的发展过程经历了由简单到复杂、又粗糙到精密、由机械到机电结合再到全电子化、由单一功能到多功能的过程[1]。特别是近30年以来,工艺流程中的现场称重、配料定量称重、以及产品质量的监测等工作,都离不开能输出信号的电子衡器。近年来电子称已愈来愈多地参与到数据的处理和控制过程中。现代称重技术和数据系统已经成为工艺技术、储运技术、预包装技术、收货业务及商业销售领域中不可或缺的组成部分。随着称重传感器各项性能的不断突破[2],为电子称的发展奠定了基础,国外如美国、西欧等一些国家在20世纪60年代就出现了0.1%称量准确度的电子称,并在70年代中期约对75%的机械称进行了机电结合式改造。 我国的衡器在20世纪40年代以前还全是机械式的,40年代开始发展了机电结合式的衡器,50年代开始出现了以称重传感器为主的电子衡器,80年代以来,我国通过自行研究引进消化吸收和技术改造,已由传统的机械式衡器步入集传感器、微电子技术、计算机技术与一体化的电子衡器发展阶段[3]。随着称重传感器技术以及超大规模集成电路和微处理器的进一步发展,电子称重技术及其应用范围将更进一步的发展,并被人们越来越重视。根据近些年来电子称重技术和电子衡器的发展情况及电子衡器市场的需求,电子称的发展动向为:小型化、模块化、智能化、集成化;其技术性能趋向于速率高、准确度高、可靠性高;其应用性趋向综合性、组合性[4]。 1.2 电子秤的组成 1.2.1电子秤的基本结构 电子秤是利用物体的重力作用来确定物体质量(重量)的测量仪器,也可用来确定与质量相关的其它量大小、参数、或特性。不管根据什么原理制成的电了秤均由以
单片机红绿灯电路设计
四川现代职业学院《单片机原理及应用》课程设计红绿灯实训报告 题目:红绿灯项目设计报告 系别:电子信息技术系 专业:电子信息工程技术 组员:贺淼、纪鹏、邵文稳 指导老师:陶薇薇 2014年7月12日
摘要 交通在人们的日常生活中占有重要的地位,随着人们社会活动的日益频繁,这点更是体现的淋漓尽致。交通信号灯的出现,使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。本系统采用STC89C52点单片机以及数码管为中心器件来设计交通灯控制器,实现了南北方向为主要干道,要求南北方向每次通行时间为30秒,东西方向每次通行时间为25秒。启动开关后,南北方向红灯亮25秒钟,而东西方向绿灯先亮20秒钟,然后闪烁3秒钟,转为黄灯亮2秒钟。接着,东西方向红灯亮30秒钟,而南北方向绿灯先亮25秒,然后闪烁3秒钟,转为黄灯亮2秒钟,如此周而复始。 软件上采用C语言编程,主要编写了主程序,中断程序延时程序等。经过整机调试,实现了对十字路口交通灯的模拟。
目录 (一)硬件部分--------------------------- 3 1.1 STC89C52芯片简介-----------------------3 1.2 主要功能特性---------------------------4 1.3 STC89C52芯片封装与引脚功能-------------5 1.4 基于STC89C52交通灯控制系统的硬件电路分析及设计-------------------------------------------10 (二)软件部分----------------------------14 2.1 交通灯的软件设计流程图-----------------14 2.2 控制器的软件设计-----------------------15 (三)电路原理图与PCB图的绘制-------------16 3.1 电路原理图的绘制(见附录二)----------16 3.2 PCB图的绘制(见附录三)---------------16 3.3 印刷电路板的注意事项------------------16 (四)调试及仿真---------------------------------------19 4.1 调试----------------------------------19 4.2 仿真结果------------------------------20 (五)实验总结及心得体会---------------------------21 5.1 实验总结-----------------------------------------------21 5.2 实验总结-----------------------------------------------22 附录程序清单---------------------------22
基于单片机的电子称毕业设计论文正文及结论
哈尔滨工程大学本科生毕业论文 第1章绪论 1.1引言 在我们生活中经常都需要测量物体的重量,于是就用到秤,但是随着社会的进步、科学的发展,我们对其要求操作方便、易于识别。随着计量技术和电子技术的发展,传统纯机械结构的杆秤、台秤、磅秤等称量装置逐步被淘汰,电子称量装置电子秤、电子天平等以其准确、快速、方便、显示直观等诸多优点而受到人们的青睐。电子秤向提高精度和降低成本方向发展的趋势引起了对低成本、高性能模拟信号处理器件需求的增加。通过分析近年来电子衡器产品的发展情况及国内外市场的需求,电子衡器总的发展趋势是小型化、模块化、集成化、智能化;其技术性能趋向是速率高、准确度高、稳定性高、可靠性高;其功能趋向是称重计量的控制信息和非控制信息并重的“智能化”功能;其应用性能趋向于综合性和组合性。 1.2 选题背景和意义 称重技术自古以来就被人们所重视,作为一种计量手段,广泛应用于工农业、科研、交通、内外贸易等各个领域,与人民的生活紧密相连。电子秤是电子衡器中的一种,衡器是国家法定计量器具,是国计民生、国防建设、科学研究、内外贸易不可缺少的计量设备,衡器产品技术水平的高低,将直接影响各行各业的现代化水平和社会经济效益的提高。称重装置不仅是提供重量数据的单体仪表,而且作为工业控制系统和商业管理系统的一个组成部分,推进了工业生产的自动化和管理的现代化,它起到了缩短作业时间、改善操作条件、降低能源和材料的消耗、提高产品质量以及加强企业管理、改善经营管理等多方面的作用。称重装置的应用已遍及到国民经济各领域,取得了显著的经济效益。电子秤是称重技术中的一种新型仪表,广泛应用于各种场合。电子秤与机械秤比较有体积小、重量轻、结构简单、价格低、实用价值强、维护方便等特点,可在各种环境工作,重量信号可远传,易于实现 1
EDA乐曲硬件演奏电路设计 课程设计
摘要 乐曲演奏广泛用于自动答录装置、手机铃声、集团电话、及智能仪器仪表设备。实现方法有许多种,随着FPGA集成度的提高,价格下降,EDA设计工具更新换代,功能日益普及与流行,使这种方案的应用越来越多。如今的数字逻辑设计者面临日益缩短的上市时间的压力,不得不进行上万门的设计,同时设计者不允许以牺牲硅的效率达到保持结构的独特性。使用现今的EDA软件工具来应付这些问题,并不是一件简单的事情。FPGA预装了很多已构造好的参数化库单元LPM 器件。通过引入支持LPM的EDA软件工具,设计者可以设计出结构独立而且硅片的使用效率非常高的产品。 本课设在EDA开发平台上利用VHDL语言设计数控分频器电路,利用数控分频的原理设计乐曲硬件演奏电路,并定制LPM-ROM存储音乐数据,以“两只老虎”乐曲为例,将音乐数据存储到LPM-ROM,就达到了以纯硬件的手段来实现乐曲的演奏效果。只要修改LPM-ROM所存储的音乐数据,将其换成其他乐曲的音乐数据,再重新定制LPM-ROM,连接到程序中就可以实现其它乐曲的演奏。 关键词:FPGA;EDA;VHDL;音乐
目录 设计要求 (1) 1、方案论证与对比 (1) 1.1方案一 (1) 1.2方案二 (1) 1.3综合对比 (1) 2 乐曲演奏电路原理 (2) 2.1 音乐演奏电路原理 (2) 2.2 音符频率的获得 (2) 2.3 乐曲节奏的控制 (3) 2.4 乐谱发生器 (3) 2.5 乐曲演奏电路原理框图 (3) 3音乐硬件演奏电路的设计实现 (4) 3.1 地址发生器模块 (4) 3.1.1 地址发生器的VHDL设计 (4) 3.2 分频预置数模块 (6) 3.2.1 分频预置数模块的VHDL设计 (6) 3.3 数控分频模块 (8) 3.3.1 数控分频模块的VHDL设计 (8) 3.4 music模块 (10) 3.4.1 音符数据文件 (10) 3.5.2 LPM-ROM定制 (12) 3.6 顶层文件 (14) 4 时序仿真及下载调试过程 (16) 4.1 时序仿真图 (16) 4.2 引脚锁定以及下载 (17) 4.3调试过程及结果 (17) 5扩大乐曲硬件演奏电路的通用性 (18) 5.1 完善分频预置数模块的功能 (18) 设计总结与心得体会 (21) 参考文献 (22)
基于51单片机的电子秤的设计
学号: 毕业设计 G RADUATE T HESIS 论文题目:基于51单片机的电子秤的设计 学生姓名: 专业班级: 学院: 指导教师: 2017年06月12日
第一章功能说明 本设计系统以单片机AT89S52为控制核心,实现电子秤的基本控制功能。在设计系统时,为了更好地采用模块化设计法,分步设计了各个单元功能模块。 系统的硬件部分包括最小系统部分、数据采集部分、人机交互界面和系统电源四大部分。最小系统部分主要包括AT89S52和扩展的外部数据存储器;数据采集部分由称重传感器,信号的前期处理和A/D转换部分组成,包括运算放大器AD620和A/D转换器ICL7135;人机界面部分为键盘输入,四位LED数码显示器,可以直观的显示重量的具体数字以及方便的输入数据,使用方便;系统电源以LM317和LM337为核心设计电路以提供系统正常工作电源。 系统的软件部分应用单片机C语言进行编程,实现了该设计的全部控制功能。该电子秤可以实现基本的称重功能(称重范围为0~9.999Kg,重量误差不大于±0.005Kg),并发挥部分的显示购物清单的功能,可以设置日期和设定十种商品的单价,还具有超量程和欠量程的报警功能。 本系统设计结构简单,使用方便,功能齐全,精度高,具有一定的开发价值。称重传感器原理 即由非电量(质量或重量)转换成电量的转换元件,它是把支承力变换成电的或其它形式的适合于计量求值的信号所用的一种辅助手段。 按照称重传感器的结构型式不同,可以分直接位移传感器(电容式、电感式、电位计式、振弦式、空腔谐振器式等)和应变传感器(电阻应变式、声表面谐振式)或是利用磁弹性、压电和压阻等物理效应的传感器。 对称重传感器的基本要求是:输出电量与输入重量保持单值对应,并有良好的线性关系;有较高的灵敏度;对被称物体的状态的影响要小;能在较差的工作条件下工作;有较好的频响特性;稳定可靠。 传感器下的定义是:“能感受规定的被测量并按照一定的规律转换成可用信号的器件或装置,通常由敏感元件和转换元件组成”。其中敏感元件指传感器中能直接感受被测量的部分,转换元件指传感器中能将敏感元件输出量转换为适于传输和测量的电信号部分。此外传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 称重传感器在电子秤中占有十分重要的位置,被喻为电子秤的心脏部件,它的性能好坏很大程度上决定了电子秤的精确度和稳定性。通常称重传感器产生的误差约占电子秤整机误差的50%~70%。若在环境恶劣的条件下(如高低温、湿热),传感器所占的误差比例就更大,因此,在人们设计电子秤时,正确地选用称重传感器非常重要。 称重传感器的种类很多,根据工作原理来分常用的有以下几种:电阻应变式、电容式、压磁式、压电式、谐振式等。(本设计采用的是电阻应变式)电阻应变式称重传感器包括两个主要部分,一个是弹性敏感元件:利用它将被测的重量转换为弹性体的应变值;另一个是电阻应变计:它作为传感元件将弹性体的应变,同步地转换为电阻值的变化。电阻应变片所感受的机械应变量一般
电子秤电路设计与制作
电子秤电路设计与制作 实 验 报 告 姓名: 学号: 指导老师: 通信与信息工程学院 电子秤电路设计指导书 一、实验目的: 本实验要求学生设计并制作一个电子秤电路,要求能测量重量在0~200g间的物体,输出为电压信号,通过调节电路使电压值为对应的重量值,电压量纲mv改为重量纲g即成为一台原始电子秤。 二、基本原理: 基本思路 总体设计思路如图1所示,所测重量经过转换元件转换为电阻变化,再经过测量电路转化为电压变化,经过放大电路放大调节后输出显示得到所需信号。 图1 基本设计思路 电阻应变式传感器 本设计主要通过电阻应变式传感器实现。电阻应变式传感器是利用电阻应变片将应变转换为电阻的变化,实现电测非电量的传感器。传感器由在不同的弹性敏感元件上粘贴电阻应变片构成,当被测物理量作用在弹性敏感元件上时,弹性敏感元件产生变形,并使附着其上的电阻应变片一起变形,电阻应变片再将变形转换为电阻值的变化。应变式
电阻传感器是目前在测量力、力矩、压力、加速度、重量等参数中应用最广泛的传感器之一。 1、弹性敏感元件 物体在外力作用下而改变原来尺寸或形状的现象称为变形,而当外力去掉后物体又能完全恢复其原来的尺寸和形状,这种变形称为弹性变形。具有弹性变形特性的物体称为弹性元件。 弹性敏感元件是指元件在感受到力、压力、力矩、振动等被测参量时,能将其转换成应变量或位移量,弹性敏感元件可以把被测参数由一种物理状态转换为另一种所需要的物理状态。 2、电阻应变片 对于一段长为L,截面积为S,电阻率为ρ的导体,未受力时电阻为 R = ρ,在 外力的作用下,电阻丝将会被拉伸或压缩,导体的长度L、截面积S以及电阻率ρ等均将发生变化,从而导致其电阻值发生变化,这种现象称为“电阻应变效应”。 利用金属或半导体材料电阻丝的应变电阻效应,可以制成测量试件表面应变的敏感元件。为在较小的尺寸范围内感受应变,并产生较大的电阻变化,通常把应变丝制成栅状的应变敏感元件,即电阻应变片,通常由敏感栅、基底、盖片、引线和黏结剂等组成。 测量电路 电阻应变片把机械应变信号转换成电阻变化后,由于应变量及其应变电阻变化一般都很微小,既难以直接精确测量,又不便直接处理。因此,必须采用转换电路,把应变计的电阻变化转换成电压或电流变化,以便于测量。具有这种转换功能的电路称为测量电路。 电桥电路是目前广泛采用的测量电路,常见的直流电桥电路如图2, 图2 直流电桥 电桥输出电压为 Uo=U (式1) R1、R2、R3、R4为四个桥臂,当一个臂、两个臂或四个臂接入应变片时,就相应构成了单臂、双臂和全臂工作电桥。下面分别就单臂、半桥和全桥电路进行讨论。 (1)单臂工作电桥 图3 单臂工作电桥 如图3所示,R1为电阻应变片,R2、R3、R4为固定电阻。应变片未受力时电桥处于平衡状态,R1R3=R2R4,输出电压U0=0,当承受应变时,R1阻值发生变化,设为R1+ΔR,电桥不平衡,产生输出电压为 Uo= (R1+RR)R3?R2R4 (R1+RR+R2)(R3+R4) (式2) 设R1=R2=R3=R4=R,又ΔR< 摘要 电子秤是日常生活中常用的称重设备,广泛应用于超市、大中型商场、物流配送中心。电子秤在结构和原理上取代了以杠杆平衡为原理的传统机械式称量工具。相比传统的机械式称量工具,电子秤具有称量精度高、装机体积小、应用范围广、易于操作使用等优点,在外形布局、工作原理、结构和材料上都是全新的计量衡器。 微电子技术的发展为电子秤提出了改进的空间。电子秤向着简单、便宜发展,智能化、精确的电子秤成为了人们的追求。本简易电子秤以常见的AT89C51为核心,以电阻应变片采集应变数据,通过HX711放大并进行AD转换供单片机处理,用LCD1602显示所测量的重量,同时本电子秤系统还提供单价设置进行求价格的计算以及去皮功能,通过一些简单低成本的元器件就完成了一个功能齐全的电子秤的制作,将传统电子秤的成本进行了缩减。 关键词:电阻应变片 AT89C51 HX711 电子秤 第一章方案与论证 一、方案类型 (一)方案一 通过单片机为主控芯片,用应变片采集应变数据,通过专用仪表放大器INA128对采集到的信号进行放大,在配上模数转换芯片对放大了的模拟信号转化为数字信号,传入单片机中进行数据处理,找出函数关系并转化关系。通过数字信号转化为重量值显示在LDC1602上,同时通过键盘进行数据输入,输入单价、去皮等功能。通过蜂鸣器和二极管实现超额报警功能。 (二)方案二 以单片机为主控芯片,应变片采集应变数据,将放大和模数转换用HX711芯片来同时进行实现,将模拟量传入主控芯片单片机中进行数据转换,通过函数关系转换为重量显示到LED 上或者LCD1602上,同时通过键盘按键进行数据输入,输入单价、去皮等功能,并通过蜂鸣器进行数据处理。 (三)方案三 运用PLC作为主控制器,PLC运用广泛,它具有接线简单,通用性好,编程简单,使用方便,可连接为控制网络系统,易于安装,便于维护等优点。 二、方案论证与选定 运用51单片机作为主控芯片,AT89C51是一种高效微控制器。它为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。但方案一中,放大和AD转换模块为独立模块,它们的独立设计费事费力且还会存在误差较大的情况。相比于方案一,方案二一HX711作为放大和AD 转换芯片,简化了电路结构。HX711是一款专为高精度电子秤设计的24位AD转换器芯片。与同类型其他芯片相比,该芯片集成了包括文雅电源、片内时钟振荡器等其它同类型芯片所需要的外围电路,具有集成度高、响应速度快、抗干扰性强等优点。精度方面很好的满足了题目中的要求,相比于方案一,方案二根据可行性。 方案三采用PLC作为主控芯片,但其价格昂贵,违背了我们制作电子秤的简单、便捷、便宜的原则,所以我们并没考虑选用PLC作为主控芯片。 综合考虑后,我们决定选择方案二来进行本简易电子秤系统的设计与制作。通过精度、价格、简单程度出发考虑,方案二是最合适的。 摘要 随着微电子技术的应用,市场上使用的传统称重工具已经满足不了人们的要求。为了改变传统称重工具在使用上存在的问题,在本设计中将智能化、自动化、人性化用在了电子称重的控制系统中。本系统主要由单片机来控制,测量物体重量部分由称重传感器及A/D转换器组成,加上显示单元,此电子秤俱备了功能多、性能价格比高、功耗低、系统设计简单、使用方便直观、速度快、测量准确、自动化程度高等特点。 本系统以AT89S52单片机为主控芯片,外围附以称重电路、显示电路、报警电路、键盘电路等构成智能称重系统电路板,从而实现自动称重系统的称重功能、报警功能、数据计算功能以及人机交换功能。可以说,此设计所完成的电子秤很大程度上满足了应用需求。 关键词 AT89S52,CZAF-602压力传感器,A/D转换器,LCD显示器. Abstract With the application of microelectronic technology,the tools of traditional weighing on the market have can't satisfy the demands of people. In order to change the problem of the application of traditional weighing tools in the using of daily life, the design will be integrated with intelligence, automation and human nature in the electronic scales with weight control system. This system mainly controlled by the single chip microcomputer , measured by weighting transducer and A/D converter component and added with the display unit, the electronic scales are aptitude for the high ratio of performance, multi-function , low power consumption ,and it is simple enough ,especially it is given the characteristic with Easy-to-use intuitively, Speed, Measure accurately, Higher automation. The system take AT89S52 SCM as the main controller chip, 福建电力职业技术学院 课程设计课程名称:传感器与检测技术课设 题目:电子秤电路设计 专业班次: 姓名:杰克 学号: 指导教师: 学期:2011-2011学年第一学期日期:2012.2.13-2012.2.20 摘要 该设计以51系列单片机AT89S52为控制核心,实现了电子秤的基控制功能。随着电子技术和自动化测量技术的不断发展,传统的称重系统在功能、精度、性价比等方面已难以满足人们的需要,尤其在智能化、便携式、对微小质量的测量方面更显得力不从心。近年来,新型单片机的出现和集成电路技术的发展为更新产品设计,研制高性价比的称重控制器提供了条件。本设计采用AVR单片机为控制核心,结合电阻应变式压力传感器和相应的信号采集电路,A/D转换部分组成,人机交互界面为键盘输入和点阵式液晶显示设计出一种高精度、多功能、低成本的新型电子秤。 该电子秤可以实现基本的称重功能(称重范围为0~10千克,质量误差不大于10克),还具有超量程和报警功能。整个系统结构简单,适用方便,功能齐全,精度高,具有一定的开发价值。 关键词:单片机;集成电路;采样电路;A/D转换器;液晶显示 目录 摘要 ......................................................................... I 第一章绪论 .. (3) 1.1 选题背景与意义 (3) 1.2 称重传感器的基本知识 (3) 1,3 研究的现状 (3) 第二章系统方案的设计 (6) 2.1 系统总体设计 (6) 2.2 系统工作原理及设计基本思路 (6) 2.3 数据采样部分的方案确定 (7) 第三章系统硬件设计 (10) 3.1 AT89S52单片机 (10) 3.2 称重传感器 (10) 3.3 A/D转换器 (11) 3.4 人机界面 (12) 第四章总结 (13) 参考文献 (14) 学号: G RADUATE T HESIS 论文题目:基于51 单片机的电子秤的设计 学生姓名: 专业班级: 学院: 指导教师: 2017 年06 月12 日 第一章功能说明 本设计系统以单片机AT89S52为控制核心,实现电子秤的基本控制功能。在设计系统时,为了更好地采用模块化设计法,分步设计了各个单元功能模块。 系统的硬件部分包括最小系统部分、数据采集部分、人机交互界面和系统电源四大部分。最小系统部分主要包括AT89S52和扩展的外部数据存储器;数据采集部分由称重传感器,信号的前期处理和A/D 转换部分组成,包括运算放大器AD620和A/D 转换器ICL7135;人机界面部分为键盘输入,四位LED数码显示器,可以直观的显示重量的具体数字以及方便的输入数据,使用方便;系统电源以LM317和LM337为核心设计电路以提供系统正常工作电源。 系统的软件部分应用单片机C 语言进行编程,实现了该设计的全部控制功能。该电子秤可以实现基本的称重功能(称重范围为0~9.999Kg ,重量误差不 大于± 0.005Kg), 并发挥部分的显示购物清单的功能,可以设置日期和设定十种商品的单价,还具有超量程和欠量程的报警功能。 本系统设计结构简单,使用方便,功能齐全,精度高,具有一定的开发价值。 称重传感器原理 即由非电量(质量或重量)转换成电量的转换元件,它是把支承力变换成电的或其它形式的适合于计量求值的信号所用的一种辅助手段。 按照称重传感器的结构型式不同,可以分直接位移传感器(电容式、电感式、电位计式、振弦式、空腔谐振器式等)和应变传感器(电阻应变式、声表面谐振式)或是利用磁弹性、压电和压阻等物理效应的传感器。对称重传感器的基本要求是:输出电量与输入重量保持单值对应,并有良好的线性关系;有较高的灵敏度;对被称物体的状态的影响要小;能在较差的工作条件下工作;有较好的频响特性;稳定可靠。 传感器下的定义是:“能感受规定的被测量并按照一定的规律转换成可用信号的器件或装置,通常由敏感元件和转换元件组成” 。其中敏感元件指传感器中能直接感受被测量的部分,转换元件指传感器中能将敏感元件输出量转换为适于传输和测量的电信号部分。此外传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 称重传感器在电子秤中占有十分重要的位置,被喻为电子秤的心脏部件,它的性能好坏很大程度上决定了电子秤的精确度和稳定性。通常称重传感器产生的误差约占电子秤整机误差的50%~70%。若在环境恶劣的条件下(如高低温、湿热),传感器所占的误差比例就更大,因此,在人们设计电子秤时,正确地选用称重传感器非常重要。 称重传感器的种类很多,根据工作原理来分常用的有以下几种:电阻应变式、电容式、压磁式、压电式、谐振式等。(本设计采用的是电阻应变式) 电阻应变式称重传感器包括两个主要部分,一个是弹性敏感元件:利用它将 89c51单片机4*4键盘应用实例硬件仿真电路图如下: 程序如下(编译成功): #include"reg51.h" #include"LCD1602.h" #include"hardware.h" char code tab[4][4]={ {'1','4','7','#'}, {'2','5','8','0'}, {'3','6','9','*'}, {'A','B','C','D'}}; //0到F的16个键植 void delay(unsigned char a) { unsigned char i; while(a--) for(i=100;i>0;i--) ; } char kbscan() //键盘扫描 { unsigned char hang,lie,key; if(P3!=0x0f) delay(5); if(P3!=0x0f) { switch(P3&0x0f) { case 0x0e:lie=0;break; case 0x0d:lie=1;break; case 0x0b:lie=2;break; case 7:lie=3;break; } P3=0xf0; P3=0xf0; switch(P3&0xf0) { case 0xe0:hang=0;break; case 0xd0:hang=1;break; case 0xb0:hang=2;break; case 0x70:hang=3;break; } P3=0x0f; while(P3!=0x0f); key=tab[hang][lie]; } else key=0; return (key); } void main() { unsigned char temp; LCD_initial(); LCD_prints("piaoling"); P3=0x0f; P0=0xff; while(1) A_8255 EQU 7C00H B_8255 EQU 7D00H C_8255 EQU 7E00H CON_8255 EQU 7F00H;8255端口定义 ADC_0808 EQU 8000H;ADC0809地址ZHONGLIANG EQU 15H;重量存放地址 DANJIA EQU 16H;单价存放地址 EOC EQU P3.3 W8 EQU 0FEH W7 EQU 0FDH W6 EQU 0FBH W5 EQU 0F7H W4 EQU 0EFH W3 EQU 0DFH W2 EQU 0BFH W1 EQU 07FH;定义LED位码 ;;;;;;;;;主程序;;;;;;;;;; ORG 0000H LJMP MAIN ORG 0003H LJMP EINT0S ORG 0100H MAIN: MOV P1,#0F0H SETB TCON.0; 外部中断为下降沿触发 MOV IE,#81H; 外部中断开中断 MOV DPTR,#CON_8255 MOV A,#80H;状态字 MOVX @DPTR,A;8255初始化 LOOP: PUSH DPH PUSH DPL PUSH ACC MOV DPTR,#ADC_0808 MOV A,#00H MOVX @DPTR,A;启动0808,A无实际意义 ADLP1:JNB EOC,ADLP1 ADLP2:JB EOC,ADLP2 MOVX A,@DPTR;读 MOV ZHONGLIANG,A POP ACC POP DPL POP DPH MOV A,ZHONGLIANG LCALL XIANSHI1;调用显示程序 MOV A,DANJIA LCALL XIANSHI2 MOV A,ZHONGLIANG MOV B,DANJIA MUL AB;算出总价 LCALL XIANSHI3;只显示低八位 SJMP LOOP ;;;;;;;;;;;;;;;键盘子程序;;;;;;;;; EINT0S: LCALL KEY ;调用键盘扫描程序 KEY: CLR EA ;中断总禁止 PUSH PSW ;PSW入栈 LCALL DELAY ;调用延时程序去抖动 LCALL KS ;调用检测按键子程序 JNZ SAOMIAO ;若有按键则跳转至扫描 LJMP INT0R SAOMIAO: ACALL K1 ;调用键盘扫描程序 INC A MOVC A,@A+PC ;查表后将值送入累加器 MOV DANJIA,A ;在P0口显示键盘值 K1: ;键盘扫描子程序 MOV R2,#0EFH ;将扫描值送入R2暂存 MOV R4,#00H ;R4用于存放行值,并将00H暂存 K3: MOV P1,R2 ;将R2的值送入P1口 L6: JB P1.0,L1 ;P1.0等于1跳转到L1 MOV A,#00H ;将第一列的列值00H送入ACC AJMP LK ;跳转到键值理程序进行键值处理L1: JB P1.1,L2 MOV A,#03H AJMP LK L2: JB P1.2,L3 MOV A,#06H 一.引言 现在越来越多的人开始注意与人身安全密切相关的设备,如ABS、安全气囊等。汽车制动防抱死系统,简称为ABS,是提高汽车被动安全性的一个重要装置。有人说制动防抱死系统是汽车安全措施中继安全带之后的最大进展,是提高汽车制动安全性的又一重大进步。 ABS有的四大优点: 1.加强对车辆的控制。装备有ABS的汽车,驾驶员在紧急制动过程中仍能保 持着很大程度的操控性,可以及时调整方向,对前面的障碍或险情做出及时、必要的躲避。而未配备ABS的车辆紧急制动时容易产生侧滑、甩尾等意外情况,使驾驶员失去对车辆的控制,增加危险性。 2.减少浮滑现象。没有配备ABS的车辆在潮湿、光滑的道路上紧急制动,车 轮抱死后会出现车辆在路面上保持惯性继续向前滑动的情况。而ABS由于减少了车轮抱死的机会,因此也减少了制动过程中出现浮滑的机会。 3.有效缩短制动距离。在紧急制动状态下,ABS能使车轮处于既滚动又拖动 的状况,拖动的比例占20%左右,这时轮胎与地面的摩擦力最大,即所谓的最佳制动点或区域。普通的制动系统无法做到这一点。 4.减轻了轮胎的磨损。使用ABS消除了在紧急制动过程中抱死的车轮使轮胎 遭受不能修复的损伤,即在轮胎表面形成平斑的可能性。大家留心就会发现,在道路上留下长长刹车痕迹的是未装备ABS的车辆,而装备了ABS 的车辆,只会留下轻微的刹车痕迹,并且是一小段一小段的,明显减少了轮胎和地面的磨损程度。 二.A BS的基本工作原理 ABS通常都由控制装置和ABS警示灯等组成。在不同的ABS系统中,制动压力调节装置的结构形式和工作原理往往不同,电子控制装置的内部结构和控制逻辑以及车轮转速传感器、制动压力调节装置都不尽相同。 在常见的ABS系统中,每个车轮上各安装一个转速传感器,将有关各车轮转 ATmega128 单片机硬件电路设计 在本系统中,本小节主要讲ATmega128 单片机的内部资源、工作原理和硬件电路设计等。2.5.1 ATmega128 芯片介绍ATmega128 为基于AVR RISC 结构的8 位低功耗CMOS 微处理器。片内ISP Flash 可以通过SPI 接口、通用编程器,或引导程序多次编程。引导程序可以使用任何接口来下载应用程序到应用Flash 存储器。通过将8 位RISC CPU 与系统内可编程的Flash 集成在一个芯片内,ATmega128 为许多嵌入式控制应用提供了灵活而低成本的方案。ATmega128 单片机的功能特点如下:(1)高性能、低功耗的AVR 8 位微处理器(2)先进的RISC 结构①133 条指令大多数可以在一个时钟周期内完成② 32x8 个通用工作寄存器+外设控制寄存器③全静态工作④工作于16 MHz 时性能高达16 MIPS ⑤只需两个时钟周期的硬件乘法器(3)非易失性的程序和数据存储器① 128K 字节的系统内可编程Flash ②寿命: 10,000 次写/ 擦除周期③具有独立锁定位、可选择的启动代码区(4)通过片内的启动程序实现系统内编程① 4K 字节的EEPROM ② 4K 字节的内部SRAM ③多达64K 字节的优化的外部存储器空间④可以对锁定位进行编程以实现软件加密⑤可以通 过SPI 实现系统内编程(5)JTAG 接口(与IEEE 1149.1 标准兼容)①遵循JTAG 标准的边界扫描功能②支持扩 展的片内调试③通过JTAG 接口实现对Flash,EEPROM,熔丝位和锁定位的编程(6)外设特点①两个具有独立的预分频器和比较器功能的8 位定时器/ 计数器②两个具 有预分频器、比较功能和捕捉功能的16 位定时器/ 计数器③具有独立预分频器的实时时钟计数器④两路8 位PWM ⑤ 6 路分辨率可编程(2 到16 位)的PWM ⑥输出比较调制器⑦ 8 路10 位ADC ⑧面向字节的两线接口⑨两个可编程的串行USART ⑩可工作于主机/ 从机模式的SPI 串行接口(7)特殊的处理器特点①上电复位以及可编程的掉电检测②片内经过标定的RC 振荡器③片内/ 片外中断源④ 6 种睡眠模式: 空闲模式、ADC 噪声抑制模式、省电模式、掉电模式、Standby 模式以及扩展的Standby 模式⑤可以通过软件进行选择的时钟频率⑥通过熔丝 位可以选择ATmega103 兼容模式⑦全局上拉禁止功能ATmega128 芯片有64 个引脚,其中60 个引脚具有I/O 口功能,资源比较丰富,下面对ATmega128 的各个引脚做简单介绍:VCC:数字电路的电源。GND:接地。端口(PA7..PA0)、(PB7..PB0)、(PC7..PC0)、(PD7..PD0)、(PE7..PE0)、(PF7..PF0)、(PG4..PA0):为8 位双向I/O 口,并具有可编程的内部上拉电阻。其输出缓冲器具有对称的驱动特性,可以输出和吸收大电流。作为输入使用时,若内部上拉电阻使能,则端口被外部电路拉低时将 基于单片机的电子秤的 设计 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】 四川信息职业技术学院 毕业设计说明书(论文) 设计(论文)题目: 基于单片机的电子秤的设计 专业: 应用电子技术 班级: 应电12-3 学号: 1111111 姓名: 某某某 指导教师: 某某某 二〇一四年十一月二十五日 四川信息职业技术学院毕业设计(论文)任务书 备注:任务书由指导教师填写,一式二份。其中学生一份,指导教师一份。 目录 摘要 随着微电子技术的应用,市场上使用的传统称重工具已经满足不了人们的要求。为了改变传统称重工具在使用上存在的问题,在本设计中将智能化、自动化、人性化用在了电子称重的控制系统中。本系统主要由单片机来控制,测量物体重量部分由称重传感器及A/D转换器组成,加上显示单元,此电子秤俱备了功能多、性能价格比高、功耗低、系统设计简单、使用方便直观、速度快、测量准确、自动化程度高等特点。 本系统以AT89C51单片机为主控芯片、辅以传感器采集模块、声光报警电路、电源供电模块、显示电路模块、数据转换模块等构成智能称重系统,从而实现自动称重系统的称重功能、声光报警功能。硬件部分主要由单片机 AT89C51、LCD、AD转换器、压力传感器、蜂鸣器等基本外围电子电路组成。可以说,此设计所完成的电子秤很大程度上满足了应用需求。 此电子秤具备备了功能多、性能价格比高、功耗低、系统设计简单、使用方便直观、速度快、测量准确、自动化程度高等特点。 关键词传感器采集;液晶显示;数模转换;声光报警基于51单片机电子秤设计
基于单片机的电子秤的设计与实现(毕业论文)
电子秤电路设计
基于51单片机的电子秤的设计
89C51单片机44键盘应用实例程序设计(含硬件仿真电路图)
基于单片机的电子秤程序
abs电子控制单元硬件电路设计
ATmega128 单片机硬件电路设计
基于单片机的电子秤的设计