26自由度仿人机器人
第2期(总第147期)2008年4月
机械工程与自动化
MECHANICALENGINEERING&AUTOMATl0N
No.2
Apr.
文章编号:1672—6413(2008)02—0130—02
26自由度仿人机器人的设计与控制
冯威,陈工
(北京科技大学机械:y-程学院,北京100083)
摘要:设计了一个具有26个自由度的仿人机器人.该仿人机器人具有与真实人物极为相似的外观形象,通过PICl6F877芯片对多台舵机和直流电机进行协调控制.完成眼睛、眉头、嘴角等面部表情动作和手臂、腰部等行为动作。通过该系统能够为人工智能、行为控制、人工心理等研究提供一个高效综合的试验和演示平台。
关键词:仿人机器人,舵机控制;单片机
中图分类号:TP242.6文献标识码:A
0引言,
机器人这个词语人们并不陌生,我国科学家对机器人的定义如下:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。随着科学技术的发展,机器人的应用领域也在不断拓宽,逐渐由制造业向非制造业和服务行业发展,具有人类的外形特征、可以模仿人类行为能力的仿人机器人已经出现,因此该领域集成了人工智能、人机工程学、电子技术、机械以及计算机等多学科知识及多项高新技术。仿人机器人代表了机器人的尖端技术。
1机构设计
针对仿人机器人的设计要求,从仿人外形、仿人运动功能实现及机器人整体结构出发,在考虑机构的运动学、动力学和控制系统、驱动系统要求的前提下进行了仿人机器人的机械机构设计。该仿人机器人高约1.65m,重量不超过65kg,共有26个自由度。1.1电机选型
仿人机器人机构设计中关节轴系的设计必须结构紧凑,传动精度和效率高,并保证提供必要的输出力矩和输出速度,以满足机构动作的速度和承载能力的要求。本次设计选用了两种型号的舵机(HGl4一M和MICR02BBMG)和一种直流电机(额定功率20W;电机自带减速箱的减速比100:1;连续转矩26.1mN?m)。.
1.2仿人机器人的外形设计
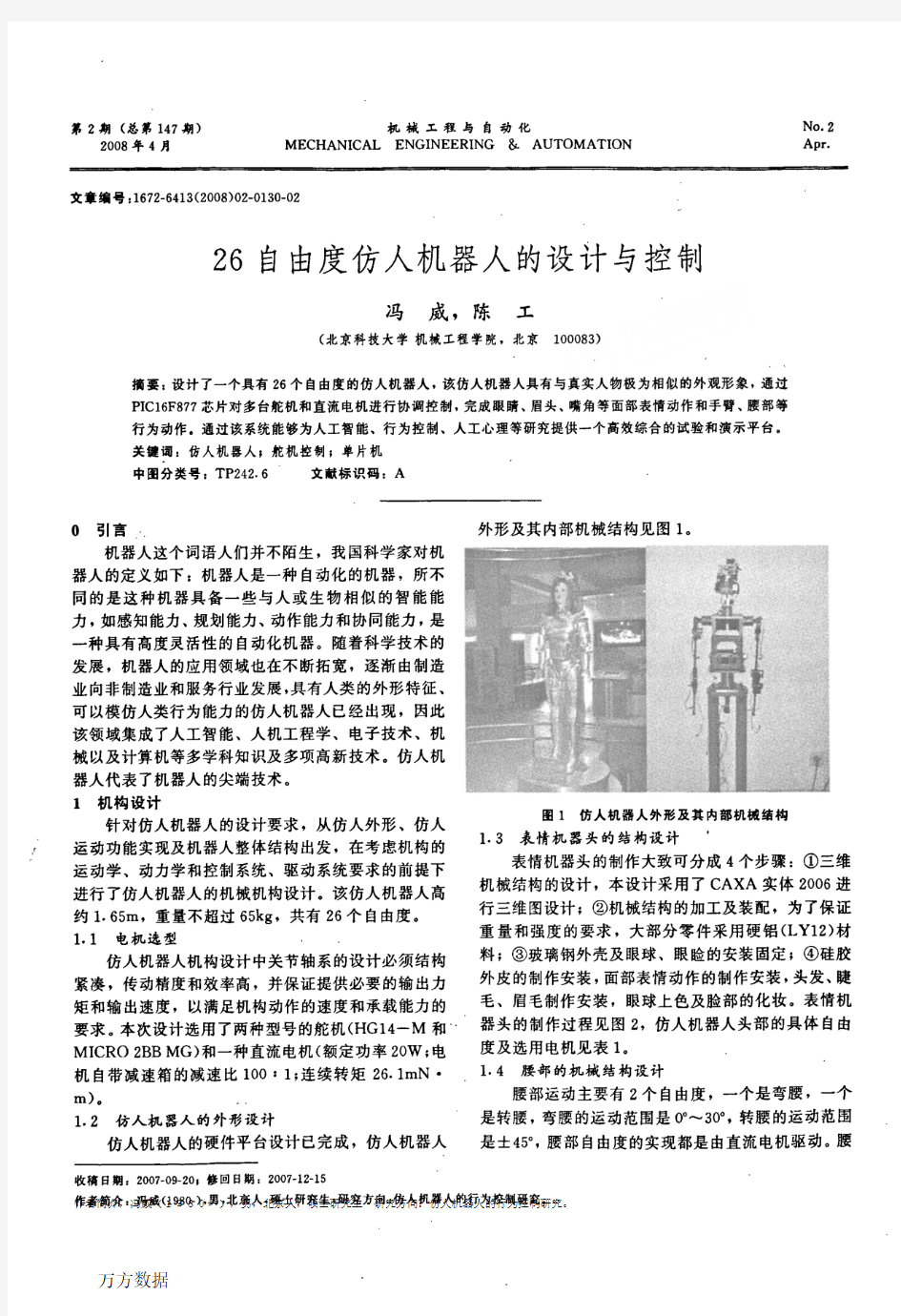
仿人机器人的硬件平台设计已完成,仿人机器人外形及其内部机械结构见图1。
图1仿人机器人外形及其内部机械结构
1.3表情机器头的结构设计’
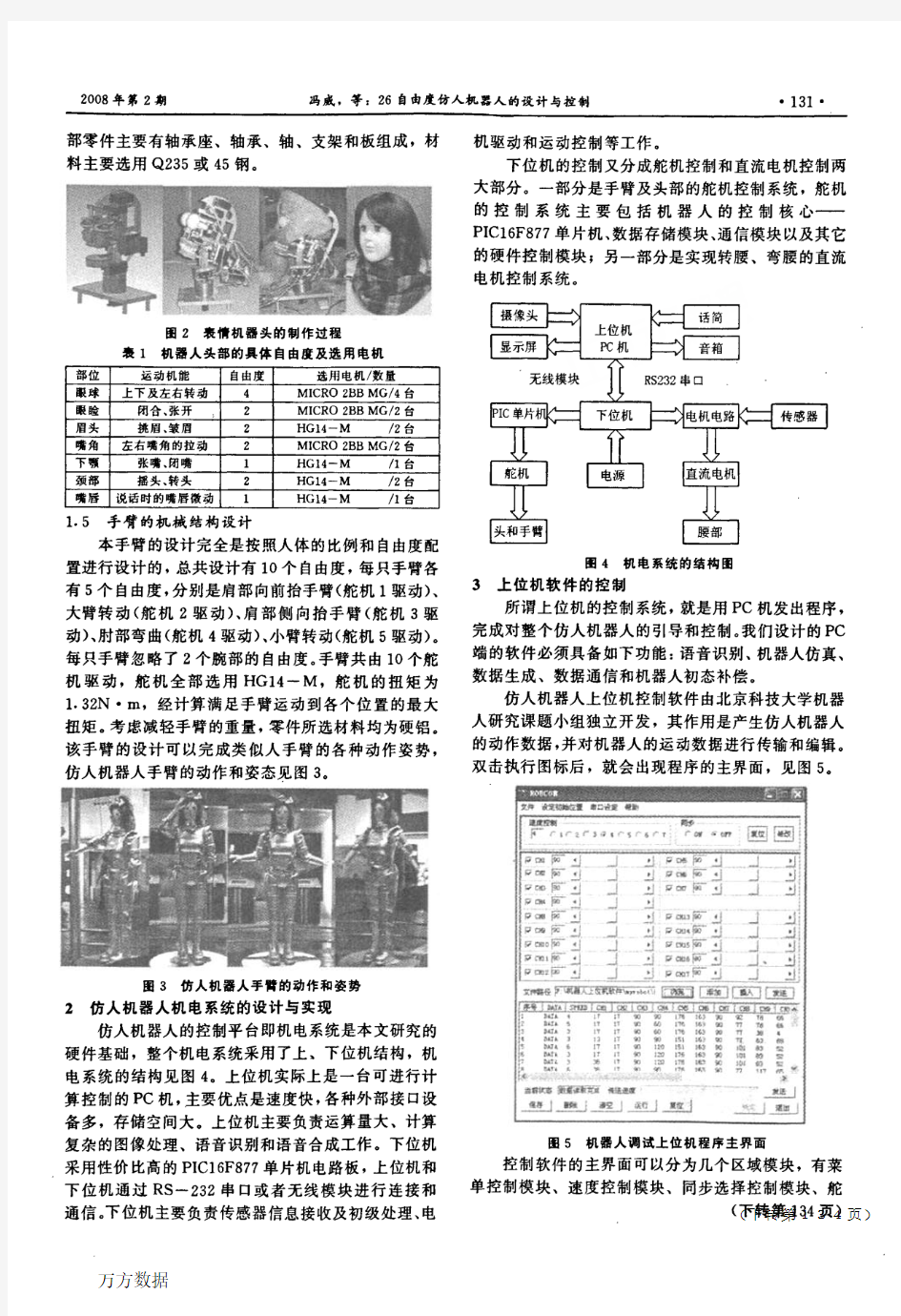
表情机器头的制作大致可分成4个步骤:①三维机械结构的设计,本设计采用了CAXA实体2006进行三维图设计;②机械结构的加工及装配,为了保证重量和强度的要求,大部分零件采用硬铝(I。Y12)材料;③玻璃钢外壳及眼球、眼睑的安装固定;④硅胶外皮的制作安装,面部表情动作的制作安装,头发、睫毛、眉毛制作安装,眼球上色及脸部的化妆。表情机器头的制作过程见图2,仿人机器人头部的具体自由度及选用电机见表1。
1.4腰部的机械结构设计
腰部运动主要有2个自由度,一个是弯腰,一个是转腰,弯腰的运动范围是0。~30。,转腰的运动范围是±45。,腰部自由度的实现都是由直流电机驱动。腰
收稿日期;2007.09.20I修回日期:2007—12—15
作者简介,冯威(1980一),男,北京人,硕士研究生?研究方向:仿人机器人的行为控制研究。
万方数据
2008年第2期冯威,等:26自由度仿人机嚣人的设计与控制?131?部零件主要有轴承座、轴承、轴、支架和板组成,材
料主要选用Q235或45钢。
图2表情机器头的制作过程
裘1机器人头部的具体自由度及选用电机
部位运动机能自由度选用电机/数量
眼球上下及左右转动4MICRO2BBMG/4台
眼睑闭合、张开2MICRO2BBMG/2台
眉头挑眉、皱眉2HGl4一M/2台
嘴角左右嘴角的拉动2MICRO2BBMG/2台
下颚张嘴、闭嘴lHGl4一M/1台
颈部摇头、转头2HGl4一M/2台
嘴唇说话时的嘴唇微动lHGl4一M/l台
1.5手臂的机械结构设计
本手臂的设计完全是按照人体的比例和自由度配
置进行设计的,总共设计有10个自由度,每只手臂各
有5个自由度,分别是肩部向前抬手臂(舵机1驱动)、
大臂转动(舵机2驱动)、肩部侧向抬手臂(舵机3驱
动)、肘部弯曲(舵机4驱动)、小臂转动(舵机5驱动)。
每只手臂忽略了2个腕部的自由度。手臂共由10个舵
机驱动,舵机全部选用HGl4一M,舵机的扭矩为
1.32N?Ill,经计算满足手臂运动到各个位置的最大
扭矩。考虑减轻手臂的重量,零件所选材料均为硬铝。
该手臂的设计可以完成类似人手臂的各种动作姿势,
仿人机器人手臂的动作和姿态见图3。
机驱动和运动控制等工作。下位机的控制又分成舵机控制和直流电机控制两大部分。一部分是手臂及头部的舵机控制系统,舵机的控制系统主要包括机器人的控制核心——PICl6F877单片机、数据存储模块、通信模块以及其它的硬件控制模块;另一部分是实现转腰、弯腰的直流电机控制系统。图4机电系统的结构图3上位机软件的控制所谓上位机的控制系统,就是用PC机发出程序,完成对整个仿人机器人的引导和控制。我们设计的PC端的软件必须具备如下功能:语音识别、机器人仿真、数据生成、数据通信和机器人初态补偿。仿人机器人上位机控制软件由北京科技大学机器人研究课题小组独立开发,其作用是产生仿人机器人的动作数据,并对机器人的运动数据进行传输和编辑。双击执行图标后,就会出现程序的主界面,见图5。图3仿人机器人手臂的动作和姿势
2仿人机器人机电系统的设计与实现
仿人机器人的控制平台即机电系统是本文研究的
硬件基础,整个机电系统采用了上、下位机结构,机
电系统的结构见图4。上位机实际上是一台可进行计
算控制的PC机,主要优点是速度快,各种外部接口设
备多,存储空间大。上位机主要负责运算量大、计算
复杂的图像处理、语音识别和语音合成工作。下位机
图5机器人调试上位机程序主界面采用性价比高的PICl6F877单片机电路板,上位机和
控制软件的主界面可以分为几个区域模块,有菜下位机通过RS--232串口或者无线模块进行连接和
单控制模块、速度控制模块、同步选择控制模块、舵
通信。下位机主要负责传感器信息接收及初级处理、电
(下转第134页) 万方数据
?134?机械工程岛自动化2008年第2期
参考变献:
[1]SendohM,IshiyamaK,AraiK.Fabricationofmagneticactuatorforuseinacapsuleendoscope[J].1髓E
TransactionsonMagnetics,2003,39(5):3232-3234.[2]MANGENEV,KlNGSlEYDA,QUINNRD,etal。
Developmentofperistalticendoscope[C].International
ConicfenceonRoboticsand矗utomation。Washingtonl
lEEE。2002:347—352.
[3]YamazakiA,SendohM,IshiyamaK.Fabricationofmicropumpwithspiral-typemagneticmicromachine心]。
Transactions0nMagnetics,2003,39(5):3289-3291.
[4丁迟冬祥.颜国难。林良明.熬子蚯蚓运渤原理的肠遒检查微小枧爨人内窥镜系统[J3.祝器人,2002,24(3):222—
228。
2,
Is]周银熊,贺惠农,顾大强,等.联用微型机器人光损伤体内驱动努法口]。科举通报,1999。44(20):2210—2213。
£艿】嚣镊煞,李立薪渍§衷裰。一种颠餐熬徽型撬器夫窑]。槐械工稳学报,2001,37(1):11.13.
C7]PowellRL,AharonsonEF,SchwarzWH,eta1.RheologicalbehaviorofnormaltracheobronchialmuCUS
ofcanines[j】.JournalofAppliedPhysiology,1974,37
(3):447—451.
Is]湿诲铸,羹孚.瘁擦攀原理[M3。筹2叛。北寒;清华大学凄黢柱,2002.
c9]郑庆林.摩擦学原璞[M].北京{高等教育出版社,1994.
DriveStudyonaNewKindofMedicalMicro—?robot
HUGuan-yul,HUZhong-wen:。LIANGLian91
(1.DepartmentofMechanical&ElectronicEngineering,ChangshaUniversity,Changsha410003,ChinaI2.ChinaUnitedEngineeringCorporation,Hangzhou310022,China)
Abstract:Anewkindofmedicalmicro-robotworkinginsidethehumanbody’Slumenorbloodvesselisintroduced.Theinfluencesofparametersofthismicro-robotonthegeneratedaxialthrustforceandminimalmucusfilmthicknessareanalyzedtheoretically。Thusitisfavorableforthemicro-robotwhichmovesuspendedlyandquicklyinthehumanbody’Slumenandbloodvessel.
Keywords:medicalmicro—robot;axiaithrustforce;minimalmucusfilmthickness
—{—-H■-—●—H●H_●——■——+-书_—}——●-?—÷—-●—-—●—h■—?-÷——{?——-HH÷——●--—}——+—’■h_—}—-■?-—÷——{—--w__p——}——{--■-?—}qhom_■■—-●——{-?—}“-《-_■———--—■—-●-__卜--}——{-——}_H_*-q-—-●-—{?-却
(I-接帮131页)
规微渊控剖模块、数据发送控制模块、运动数据慰示模块戳及功藐控镄模块等。袁蘩荸控裁模块孛有一个餐始位鬣设定的菜单,其中3个子菜单对应这个仿人机器人初始化位置控制的3个选项。通过设置初始化位置这个子菜荸,就胃羧设嚣俦大税嚣入上电盖酶视婕化位鬣。点击浏览按钮后,就可以把瑟加载的仿人机器人豹避动数据读取出来。
4缝论
26自由度仿人机器人的整体设计、安装和调试工作已缝成功完成,并且该机器入耳前已在天津科技馆静橇嚣入与撬械展区震览。遥过上、下位棍我弱霹以实现对机器人的面部表情动作和行为动作的控制,机器人接受我们发送的各种数据完成相应动作或表情,数据已经编辑成数据库并且不断扩充和延伸。在这个基础上我们就能继续进行机器人表情模式研究、行为控裁胬究等等,不赣探索槐器天技术。
参考文献:
【i】帮荚枣,羧蘩冀。携入爨器天发袋装嚣霸挑蔽溢3。辽字芏学院攀撤,2003,23(4):1-5.
C2]满翠华,范迅.类人机器人研究现状和展勰[J].农业机械学报,2006,37(9):204—207,
£3]汤趱。鼹足步褥撬器人多电橇控锚及其豫定毪研究[转】。
北京;jE京科技大攀,2006:53—57.
£43VukobratovicM,JuricdicdD.ContributiontOthe
synthesisofbipedgait西3。IEEETransactionsonBio-
MedicalEngineering-1969,16(1):1-6.
DesignandControlof26FreedomIntelligentHumanoidRobot
FENGWei,CHENGong
(SchoolofMechanicalEngineering,UniversityofScienceandTechnologyBeijing.Belling100083,China)
Abstract#Thisdissertationdesigneda26freedomintelligenthumanoidrobot.ThehumanoidrobotisverysimilartOhumanbeinginappearance。Itisbased0nthecoordinatedcontrolofseveralservosand
IX:motorsthroughthePtCl6F877chip,inordertOcompletefacialexpressionsmovementandbehaviormovement.ItcanprovideaplatformforresearchOnartificialintelligence.behaviorcontrol,artificialpsychology.Thecontrol?andcorrelativetechnologyresearchofhumanoidrobothasagreattheoreticalvalueandrealisticsignificance。’
Keywords:humanoidrobot;servoscontroltsinglechipmicrocomputer
万方数据
26自由度仿人机器人的设计与控制
作者:冯威, 陈工, FENG Wei, CHEN Gong
作者单位:北京科技大学,机械工程学院,北京,100083
刊名:
机械工程与自动化
英文刊名:MECHANICAL ENGINEERING & AUTOMATION
年,卷(期):2008,(2)
引用次数:0次
参考文献(4条)
1.刘英卓.张艳萍仿人机器人发展状况和挑战[期刊论文]-辽宁工学院学报(自然科学版) 2003(4)
2.满翠华.范迅.张华.刘晓萌类人机器人研究现状和展望[期刊论文]-农业机械学报 2006(9)
3.汤超双足步行机器人多电机控制及其稳定性研究[学位论文] 2006
4.Vukobratovic M.Juricdicd D Contribution to the synthesis of biped gait 1969(1)
相似文献(4条)
1.学位论文徐文学仿人机器人的智能信息处理技术研究2007
机器人是20世纪人类最伟大的发明之一,仿人机器人是其中尖端技术的代表。机器人信息处理系统作为仿人机器人的核心,其性能直接决定了仿人机器人的技术水平,因此对仿人机器人信息处理技术的研究具有重要的意义。 本文以17自由度的小型仿人机器人作为平台,研究了仿人机器人的智能信息处理技术,完成了机器人信息处理平台的设计。该平台以嵌入式微处理器 PIC16F877 和STC2051 为基础,采用RS232有线通信和nRF905无线射频通信相结合的两种方式,将PC 机离线计算的数据传输到仿人机器人的信息处理平台上,处理后将数据存储到一片AT24C512 上,供以后调用。课题还研究了CAN总线的通信方法,通过搭建SJA1000+TJA1050+ADUM1201 组成的CAN节点来实现CAN总线通信;在音频通信方面,做了FM 通信尝试,通过对
TEA5767HN 的驱动,机器人信息处理平台可以接收来自PC机的音频文件(该音频信号须通过FM音频发射器发送)。 在信息采集处理方面,详细介绍了角速度传感器(松下 EWTS82 陀螺仪)和 CMOS图像传感器的用法,给出了它们的应用电路图。这两种传感器都需要使用微处理器进行AD采集,不同的是CMOS通信传感器需要使用LM1881分离芯片分离出信号后再进行AD采集。文中对CMOS传感器采集的图像信息进行了灰度化和二值化处理,很好的识别了黑白两种颜色。在机器人关节控制方面,本文通过引入步进量的概念来说明多路舵机的速度控制和同步控制的算法实现;在数据存储方面,实现了对
AT24C512存储器的分区,解决了多组动作数据的存储问题;在通信协议方面,制定了数据传输协议和数据反馈协议,采用了起始位+数据位+校验和的定长数据编码格式、“和”校验与出错自动请求重传的通信方式来保证整个通信过程的正确和稳定。 课题最后对该信息处理平台作了实验测试,通过对实验结果的分析,说明该平台满足机器人控制的功能要求。同时,对机器人稳定性做了探索性的研究,指出了数字舵机和模拟舵机在性能上的差别。最后用Mega单片机制作了高性能IIC接口的舵机,利用开源软件绘制 Hermite曲线,通过修改舵机PID参数实现对IIC舵机平滑曲线控制的实验仿真。2.期刊论文梁锋.王志良.解仑.徐文学.LIANG FENG.WANG ZHILIANG.XIE LUN.XU WENXUE多舵机控制在类人机器人上的应用-微计算机信息2008,24(2)
舵机控制器是机器人的重要部件.采用一种新颖的利用单片机产生多路控制舵机用PWM的方法,利用单片机内部定时器,采用分时复用技术,在不增加任何硬件电路的前提下,用单片机实现多达24路PWM输出.该方法取代了传统的使用分立元件产生PWM波的方法,大大减少了分立元器件数目及电路连线,改善了系统可靠性,提高了控制精度,并成功用在17自由度仿人机器人的控制系统中.
3.期刊论文孟凯.何庆中.张瑞洋.MENG Kai.HE Qing-zhong.ZHANG Rui-yang小型仿人机器人系统的设计-机械工程师2008(10)
提出了一款新颖的小型开环控制双足行走机器人系统,该系统由机械系统、驱动系统和控制系统3部分组成.关节自由度为21个,比目前流行的小型机器人的17自由度增加了4个自由度,实现了机器人的协调稳定运动,SSC-32舵机控制器的应用使机器人的运动程序编写更加便利,从而可以使设计人员把主要的精力用于动作的设计.
4.学位论文李娜用于情感交互的机电综合平台研究2007
机器人技术是综合了机械设计、计算机、控制论、人工智能、仿生学等多学科而形成的高新技术,集成了多学科的发展成果,代表高新技术的发展前沿,是当前科技研究的热点方向。在当今的机器人技术的研究中,赋予机器人情感交互能力已经成为一个热点。建立具有情感交互能力的机器人系统是情感机器人研究中的关键问题。因为该系统能够为人工智能和人工心理研究提供一个高效综合的试验平台和演示平台。 本文设计了一个具有十个自由度的仿人机器人头,为实现情感交互提供了实验平台,在此基础上对机器人的情感交互与人工心理在情感机器人中的应用进行了研究:首先,论文介绍了仿人机器人头的结构设计和系统设计,机器人完全根据生理学人体结构来设计,控制系统采用上下位机结构。上位机主要负责运算量大、计算复杂的图像处理、语音识别和语音合成工作,下位机主要负责传感器信息接收、电机驱动和运动控制等工作,上下位机通过串口实现通信。其次,论述了机器人综合平台的实现,通过串口编程实现对下位机的运动控制,为机器人制作表情库,成功的构建了具有简单情感交互功能的机器人平台,为人工智能、人工心理的进一步研究提供了良好的平台。再次,用D-S证据理论进行了情感信息融合的研究,在人工心理理论的基础上,研究了情感建模,并在机器人系统中建立了一个三维的机器人情感模型,并给出了与之对应的表情。研究了在外界激励刺激下,情感状态的转移过程。给出了性格矩阵,对不同性格在相同激励下引起的情感状态转移进行了对比和仿真,得出情感状态转移规律基本符合人类自然的情感转移规律。整个实验的结论证明了本文所构建的平台对于人工心理的研究具有一定的实际意义。
本文链接:https://www.360docs.net/doc/962454334.html,/Periodical_sxjx200802048.aspx
下载时间:2010年1月24日
六自由度工业机器人设计
六自由度工业机器人 对于工业机器人的设计与大多数机械设计过程相同;首先要知道为什么要设计机器人机器人能实现哪些功能活动空间(有效工作范围)有多大了解基本的要求后,接下来的工作就好作了。 首先是根据基本要求确定机器人的种类,是行走的提升(举升)机械臂、还是三轴的坐标机器人、还是六轴的机器人等。选定了机器人的种类也就确定了控制方式,也就有了在有限的空间内进行设计的指导方向。 接下来的要做的就是设计任务的确定。这是一个相对复杂的过程,在实现这一复杂过程的第一步是将设计要求明确的规定下来;第二步是按照设计要求制作机械传动简图,分析简图,制定动作流程表(图),初步确定传动功率、控制流程和方式;第三步是明确设计内容,设计步骤、攻克点、设计计算书、草图绘制,材料、加工工艺、控制程序、电路图绘制;第四步是综合审核各方面的内容,确认生产。 下面我将以六轴工业机器人作为设计对象来阐明这一设计过程: 在介绍机器人设计之前我先说一下机器人的应用领域。机器人的应用领域可以说是非常广泛的,在自动化生产线上的就有很多例子,如垛码机器人、包装机器人、转线机器人;在焊接方面也有很例子,如汽车生产线上的焊接机器人等等;现在机器人的发展是非常的迅速,机器人的应用也在民用企业的各个行业得以延伸。机器人的设计人才需求也越来越大。 六轴机器人的应用范筹不同,设计形式也各不相同。现在世界上生产机器人的公司也很多,结构各有特色。在中国应用最多的如:ABB、Panasonic、FANUK、莫托曼等国外进口的机器人。 既然机器人的应用那么广泛,在我国却没有知名的生产公司。对于作为中国机械工程技术人员来说是一个值得思考的问题!有关机器人技术方面探讨太少了从业人员还不能成群体虽然在很多地方可以看到机器的论术,可是却没有真正形成普及的东西。 即然是要说设计,那我就从头一点一点的说起。力求讲的通俗简明一些,讲得不对的地方还请各位指正! 六轴机器人是多关节、多自由度的机器人,动作多,变化灵活;是一种柔性技术较高的工业机器人,应用面也最广泛。那么怎样去从头开始的设计它呢工作范围又怎样去确定动作怎样去编排呢位姿怎样去控制呢各部位的关节又是有怎么样的要求呢等等。。。。。。让我们带着众多的疑问慢慢的往下走吧! 首先我们设定:机器人是六轴多自由度的机器人,手爪夹持二氧气体保护焊标准焊枪;完成点焊、连续焊等不同要求的焊接部件,工艺要求、工艺路线变化快的自动生线上。最大伸长量:1700mm;转动270度;底座与地平线水平固定;全电机驱动。 好了,有了这样的基本要求我们就可以做初步的方案的思考了。 首先是全电机驱动的,那么我们在考虑方案的时候就不要去考虑液压和气压的各种结构了,也就是传动机构只能用齿轮齿条、连杆机构等机械机构了。 机器人是用于焊接方面的,那么我们就去考察有人工行为下的各种焊接手法和方法。这里就有一个很复杂的东西在里面,那就是焊接工艺;即然焊艺定不下来,我们就给它区分一下,在常用焊接里有单点点焊、连续断点点焊、连续平缝焊接、填角焊接、立缝焊接、仰焊、环缝焊等等。。。。。。 搞清了各种焊方法,也就明白了要实现这些复杂的动作就要有一套可行的控制方式才行;在机械没有完全设计出来之前可以不做太多的控制方案思考,有一个大概的轮廓概念就行了,待机械结构做完,各方面的驱动功率确定下来之后再做详细的程序。 焊枪是用常用的标准的焊枪,也就是说焊枪是随时可以更换下来的,也就要求我们要做到对焊枪的夹持部分进行快速锁定与松开。
自由度机器人认知实验
六自由度串联机器人认知实验 一.实验目的 1. 了解串联机器人的机构组成; 2. 了解机器人机械系统各部分的原理及作用; 3. 认识RBT 机器人的运动特点及控制原理 4. 掌握机器人单轴运动的方法。 5. 二.实验设备和工具 1、 RBT-6T/S03S 教学机器人一台; 2、 RBT-6T/S03S 教学机器人控制系统软件一套; 3、 RBT-6T/S03S 教学机器人控制柜一台; 4、 装有运动控制卡计算机一台; 5、 机器人气动手爪一套。 三.实验原理与方法 1, RBT 教学机器人的性能指标 机器人是一种具有高度灵活性的自动化机器,是一种复杂的机电一体化设备。机器人按技术层次分为:固定程序控制机器人、示教再现机器人和智能机器人等。如图2-1所示,本实验所使用的RBT 机器人为6自由度串联关节式机器人,即机器人各连杆由旋转关节串联连接,各关节轴线相互平行或垂直。连杆的一端装在固定的支座上(底座),另一端处于自由状态,可安装各种工具以实现机器人作业。关节的传 动采用模块化结构,由锥齿轮、同步齿型带和谐波减速器等多种传动结构配合实现。机器人各关节采用伺服电机和步进电机混合驱动,并通过Windows 环境下的 图2-1 机器人结构
软件编程和运动控制卡实现对机器人的控制,使机器人能够在工作空间内任意位置精确定位。 RBT机器人技术参数如下: 2,机器人机械系统组成 机器人机械系统主要由以下几大部分组成:原动部件、传动部件、执行部件。基本机械结构连接方式为原动部件→传动部件→执行部件。机器人的传动简图如图2-2所示。 Ⅰ关节传动链主要由伺服电机、减速器构成。 Ⅱ关节传动链主要由伺服电机、减速器构成。 Ⅲ关节传动链主要由步进电机、同步带、减速器构成。 Ⅳ关节传动链主要由步进电机、减速器构成。 Ⅴ关节传动链主要由步进电机、同步带、减速器构成。
简述工业机器人的定义
习 题 0.1 简述工业机器人的定义,说明机器人的主要特征。 0.2 工业机器人与数控机床有什么区别? 0.3 工业机器人与外界环境有什么关系? 0.4 说明工业机器人的基本组成及三大部分之间的关系。 0.5 简述下面几个术语的含义:自由度、重复定位精度、工作原理、工作速度、承载能力。 0.6 什么叫冗余自由度机器人? 0.7 题0.7图所示为二自由度平面关节型机器人机械手,图中L 1=2L 2,关节的转角范围是0?≤θ1≤180?,–90?≤θ2≤180?,画出该机械手的工作范围(画图时可以设L 2=3 cm)。 0.8 工业机器人怎样按机械系统的基本结构来分类? 0.9 工业机器人怎样按控制方式来分类? 0.10 什么是SCARA 机器人,应用上有何特点? 0.11 试总结机器人的应用情况。 题0.7图 1.1 点矢量v 为[10.00 20.00 30.00]T ,相对参考系作如下齐次坐标变换: 0.866 0.500 0.000 11.00.500 0.866 0.000 3.00.000 0.000 1.000 9.0 0 0 0 1 -????-??=??????A 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。 1.2 有一旋转变换,先绕固定坐标系Z 0轴转45°,再绕其X 0轴转30°,最后绕其Y 0轴转60°,试求该齐次坐标变换矩阵。 1.3 坐标系{B }起初与固定坐标系{O }相重合,现坐标系{B }绕Z B 旋转30°,然后绕旋转后的动坐标系的X B 轴旋转45°,试写出该坐标系{B }的起始矩阵表达式和最后矩阵表达式。 1.4 坐标系{A }及{B }在固定坐标系{O }中的矩阵表达式为 1.000 0.000 0.000 0.00.000 0.866 0.500 10.0 {}0.000 0.500 0.866 20.0 0 0 0 1 ????-??=??-????A
六轴运动机器人运动学求解分析_第九讲
六轴联动机械臂运动学及动力学求解分析 V0.9版 随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。 作者朱森光 Email zsgsoft@https://www.360docs.net/doc/962454334.html, 完成时间 2016-02-28
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。本文内容的正确性经过笔者编程仿真验证可以信赖。 2机器建模 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。 3运动学分析 3.1齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 =cosθ0 s0 = sinθ0 //c0 R0 =[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0 s1 c1 0 0
工业机器人的概念与典型应用(完整资料).doc
【最新整理,下载后即可编辑】 1.1 工业机器人的定义及特点 1.2 工业机器人的分类 关于工业机器人的分类,国际上没有制定统一的标准,有的按负载重量分,有的按控制方式分,有的按自由度分,有的按结构分,有的按应用领域分。下面依据几个有代表性的分类方法列举机器人的分类。 1.按工业机器人结构坐标系统特点方式分类 按结构坐标系统特点方式分,机器人可分为直角坐标型机器人、圆柱坐标型机器人、极坐标型(球面坐标型)机器人、关节坐标机器人、SCARA型水平关节机器人等五类。 2.按工业机器人执行机构的控制方式分类 (1)点位控制方式机器人 控制时只要求工业机器人快速准确地实现相邻各点之间的运动,而对达到目标点的运动轨迹不做任何规定。 (2)连续轨迹控制型机器人 控制时要求工业机器人严格按照预定的轨迹和速度在一定的精度范围内运动,并且速度可控,轨迹光滑,运动平稳。 (3)力(力矩)控制型机器人 在完成装配、抓放物体等工作时,除要准确定位之外,还要求使用适度的力或力矩进行工作。 (4)智能控制型机器人 机器人的智能控制是通过传感器获得周围环境的信息,并根据自身内部的知识库做出相应的决策的控制方式。 3.按程序输入方式分类 按程序输入方式可分为离线输入型和示教输入型两类。 (1)离线输入型机器人是将计算机上已编号的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制系统。
食品、饮料包装;搬运;真空包装塑料、轮胎上下料;去毛边 冶金、钢铁钢、合金锭搬运;码垛;铸件去毛刺;浇口切割 家电、家具装配;搬运;打磨;抛光;喷漆;玻璃制品切割、雕刻 海洋勘探深水勘探;海底维修;建造 航空航天空间站检修;飞行器修复;资料收集 军事防爆;排雷;兵器搬运;放射性检测 焊接机器人技术的新发展 将激光用于焊接机器人是激光焊接的一种重要形式。焊接机器人具有多自由度、编程灵活、自动化程度高、柔性程度高等特点,是焊接生产线的重要组成部分。将激光器安装在焊接机器人上进行焊接,大大提高了焊接机器人的焊接质量和适用范围,在船板、汽车生产线中激光焊接机器人具有越来越重要的地位。图1所示为CO 2 激光焊接机器人。
多自由度机械手课程设计
机电一体化系统设计课程设计 设计题目: 内装: 1. 设计说明书 2. 装配图 3. 控制电路原理图 4. ……. 专业: 姓名: 学号: 指导教师: 完成日期: 成绩: 福建农林大学机电工程学院
机电一体化系统设计课程设计说明书 设计题目: 学院: 专业年级: 学号: 学生姓名: 指导教师: 年月日
一、机械手的概述 (1) 1.1 机械手的组成和分类 (1) 1.2 应用机械手的意义 (1) 二、总体方案设计 (3) 2.1 设计任务 (3) 2.2 总体方案确定 (3) 2.2.1机械手基本形式的选择 (3) 2.2.2机械手的主要部件及运动 (3) 2.2.3驱动机构的选择 (4) 三、机械系统设计 (5) 3.1机械手手部的设计计算 (5) 3.1.1手部设计基本要求 (5) 3.1.3机械手手抓的设计计算 (5) 3.1.4.机械手手抓夹持精度的分析计算 (8) 3.1.5弹簧的设计计算 (9) 3.2腕部的设计计算 (11) 3.2.1 腕部设计的基本要求 (11) 3.2.3 腕部结构和驱动机构的选择 (12) 3.2.4 腕部的设计计算 (12) 3.3臂部的设计及有关计算 (15) 3.3.1 臂部设计的基本要求 (15) 3.3.2 手臂的典型机构以及结构的选择 (16) 3.3.3 液压缸工作压力和结构的确定 (18) 3.4机身的设计计算 (19) 3.4.1 机身的整体设计 (19) 3.4.2 机身回转机构的设计计算 (20) 3.4.3 机身升降机构的计算 (22) 3.4.4 轴承的选择分析 (25) 四、控制系统硬件电路设计 (26) 4.1可编程序控器的简介 (26) 4.2 PLC的结构,种类和分类 (26) 4.3 FX2n系列三菱PLC特点 (30) 4.4 接近开关传感器 (28) 4.5 I/O接口简介 (29) 4.6 行程开关的介绍 (30) 4.6.1 行程开关的概念 (30) 4.6.2 行程开关的作用及原理 (30) 4.7电路的总体设计 (30) 4.7.1回路的设计 (30) 4.7.2 系统输入/输出分布表 (31) 4.7.3机械手的程序设计 (33) 4.7.4 步进电机的运行控制 (33) 五、参考文献 (34)
六轴关节机器人机械结构
六轴关节机器人机械结构 e y . <7>J4 akis motor <8>J5 axis / tiKi呂motor 说uation Mdr / Flhaw -U 」£: □nis rritx r crc .inTi * 12;、JE处也mn空 < 13 ■ J6 axis red jction gear ■ S J3 axi reduct ken / \<1t)〉J5 酣仪timi啊belt i < / /<1 1>J5 3ME Wrist hoqsine/ / r也[juGlidn 営凸mr <2>J1 axis n'dijnt rm 3" J? miG irctci: <4>J2 axis rrdi.nt nn £rn^ 上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带 轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般 较大。采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的 旋转半径。此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构 设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋 转的影响,是一个值得深入考虑的问题。 机器人的腕部结构常见有如下几种结构
?3RS 在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等关节设计: 对于国外的工业机器人主要制造国家来说,六轴关节机器人的研发设计及制造已经有好几十 年的历史了,整个工业机器人的研发制造体系较为完善,他们的技术相对来说比较成熟,他们 在相互竞争中可以相互模仿、改善、不断推陈出新,他们的技术对于国内来说,近乎完美?而 国内目前这个行业还处在黎明前的黑暗阶段,虽然有不少公司有这个研发意图,或者正在研发途中,不管怎么说,浮出水面公布自己正在研发或者研发成功的公司应该说是极少数,即使宣布自己研发成功,也只是初步试验成功,真正产业化、商品化还有一段相当漫长的路要走?而更多的公司还停留在项目立项、技术评估、投入风险分析的阶段?由于国内做这个行业的 很少,相关的结构也没有什么可参考的,技术储备不足,少数的单位或个人有机会能够拆拆别 人的机器,拆个一知半解,更多的人只能在旁边看看了(比如说我,想拆都没机会A_A),还好了,网络资源丰富,今搜集到不少机械结构方面的图片,分享给大家参考,希望咱们做机械设计的(我应该也算是个机械工程师啊A_A毕竟我也是做机械的)少走点弯路,做出更好的机器? 六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动?小型的六轴关 节机器人的腕部关节主要采用谐波减速器?下面的图片较为详细的描述了常见的六轴关节机 器人的腕部结构?
六自由度机器人说明书
六自由度机器人说明书 专业:机械制造与自动化 班级: 成员:
目录 一、打开气源 二、机器人的快速操作入门 1、坐标系的选择 2、手动速度调整 3、伺服电源接通 4、接通主电源 5、接通伺服电源 三、伺服电源切断 1、切断伺服电源 2、切断主电源 四、轴操作
一、打开气源 请确认系统进气气源已进行供气,未供气或气压不足将会导致系统无法正常工作,系统运行中如断开气源,可能导致设备损坏,甚至造成人员伤害。 打开下图气泵,将开关拨到“I”,再打开气阀
拨到“开”,即 “Ⅰ” 往上拨,打开气阀
二、机器人的快速操作入门 1、坐标系的选择 在示教模式下,选择机器人运动坐标系:按手持操作示教器上的【坐标系】键,每按一次此键,坐标系按以下顺序变化,通过状态区的显示来确认。 2、手动速度调整 示教模式下,选择机器人运动速度:按手持操作示教器上【高速】键或【低速】键,每按一次,手动速度按以下顺序变化,通过状态区的速度显示来确认。 ?按手动速度【高速】键,每按一次,手动速度按以下顺序变化:微动1%→微动2%→低5%→低10%→中25%→中50%→高75%→高100%。 ?按手动速度【低速】键,每按一次,手动速度按以下顺序变化:高100%→高75%→中50%→中25%→低10%→低5%→微动2%→微动1%。 3、伺服电源接通 打开上电控柜上的主电源开关时,应确认在机器人动作 范围内无任何人员。
忽视此提示可能会发生与机器人的意外接触而造成人身伤害。如有任何问题发生,应立即按动急停键,急停键位于 电控柜前门的右上方。 4、接通主电源 ●把电控柜侧板上的主电源开关扳转到接通(ON) 的位置,此 时主电源接通。 ●按下电控柜面板上的绿色伺服启动按钮。
两自由度串联机器人分析与设计
机器人技术基础 三级项目报告 设计题目:两自由度串联机器人分析与设计指导教师:赵永杰 学生姓名:citycars 学号:09128888 邮箱:citycars@https://www.360docs.net/doc/962454334.html, 院系:机械电子工程系 汕头大学 机械电子工程系 2012年6月17日
目录 1.前言 (3) 2.运动学模型 (4) 3.机器人的位置及速度分析 (5) 3.1建立机器人位置输入输出方程 (5) 3.2建立机器人的速度关系及推导出雅可比矩阵 (5) 3.3机器人的位置反解 (5) 3.4机器人的速度反解 (7) 4.机器人的速度各项同性分析及设计 (8) 4.1速度各项同性分析 (8) 4.2速度各向同性设计求解 (10) 4.3求解及分析 (10) 4.4综合分析 (12) 5.结语 (13) 6附录 (13) 附录1:位置反解程序 (14) 附录2:速度反解程序 (15) 附录3:速度各向同性程序 (15)
两自由度串联机器人分析与设计 【摘要】通过建立两自由度串联机器人位置输入输出方程,建立两自由度串联机器人的速度关系,推导出雅可比矩阵,分析两自由度串联机器人的速度各向同性的条件,设计出一各向同性的构型。 关键词位置方程速度关系雅可比矩阵各向同性 1.前言 随着现代科学技术的迅猛发展,特别是由于微电子技术、电子计算机技术的迅猛发展,机器人更加广泛地应用于各个领域。工业机器人靠自身动力控制能力来实际各种功能,大都用于简单、重复、繁重的工作,如上、下料,搬运等,以及工作环境恶劣的场所,如喷漆、焊接、清砂和清理核废料等。本课程设计旨在通过工业机器人的一个小分支-----两自由度串联机器人,其输入输出方程、雅可比等的分析,以及对于速度各向同性的分析和设计,对工业机器人有初步的了解,为以后从事工业机器人相关工作奠定基础。
各类型机器人特点汇总
各类型机器人特点汇总 各种机器人的特点及应用简介 一机器人的定义及分类: 机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。工业机器人按其结构形式及编程坐标系主要分类为关节型机器人、移动机器人、水下机器人和直角坐标机器人等。按主要功能特征及应用分为移动机器人、水下机器人、洁净机器人、直角坐标机器人、焊接机器人、手术机器人和军用机器人等。机器人学涉及到机器人结构,机器人视觉,机器人运动规划,机器人传感器,机器人通讯和人工智能等许多方面,不同用处的机器人涉及到不同的学科,下面仅对这些机器人的结构和应用进行简单介绍: 二关节型机器人 关节型机器人的结构类同人的手臂,由几个转动轴,摆动轴和手爪等6~7个自由度组成。生产厂家主要有德国Manutec公司,德国KUKA,德国REIS,日本Motorman,日本Yaskawa 和沈阳新松等。关节型机器人的转动轴和摆动轴主要用伺服电机配几乎没有反向间隙的精密减速机或直驱力矩电机驱动,而其控制系统其难度也很大。各个厂家的关节型机器人其结构类同,主要差别在技术参数,下面以德国Manutec公司的关节型机器人为例介绍。 图1是Manutec公司型号为r15-30的6 自由度通用关节机器人,额定负载30公斤,最大可达到75 公斤,工作半径1.3 米,重复定位精度小于0.04 mm ,点到点的最大运行速度高达5.9 m/s,加速度高达23 m/s2和工作寿命20 年。可以坐立式安装,可以是掉挂式安装,也可以与水平面小于30度角的斜式安装,不影响其各项技术指标。r15可以选配防爆式的,也可以选配一级洁净式等。 r15-30主要特点是强度大刚性好和重复定位精度高,主要应用领域是其它厂家的关节型机器人由于刚性和精度不够无法应用的领域,而用5 轴加工中心成本太高或无法胜任的工作。如磨齿,异形铣削,壳(腔)内部铣削,磨,抛,切割和焊接等。 在手爪末端可以配力传感器,来加工异形表面(如铣削,磨和抛)。一个机器人也可以与双工作台及各种的双旋转轴协调同步运动。也可以是两个机器人协调同步工作,如一台机器人抓取工件,而令一台机器人对该工件进行加工,两台机器人同步协调完成特定的加工轨迹。其它厂家的关节机器人主要应用在汽车焊接和装配等任务中。关节型机器人的优点是可以从不同角度不同方位来工作,速度快,工作效率高。但主要缺点是工作半径小,负载小,价格高,应用难度大和维护费用高。 作为关节机器人的简化型机器人SCARA就是两个摆动轴和一个上下运动轴,其特点是简单,经济,适合工作空间小,负载小、高速搬运。但它的价位高于直角坐标机器人,应用行业和数量非常小。 三特种机器人 移动机器人就是能自主移动或上下楼梯的电动车,主要用于生产现场货物的自主运输和排险作业,或进入有污染和放射的环境内取样及监视等。还有一些移动机器人就是仿造一些动物,用腿和爪行走路的行走机器人,如美国的军用狗,还处于适用阶段。水下机器人与潜艇能自主潜入水下完成对海上钻井平台的水下建筑、发电站的水下闸门、海底打捞等工程的录像和监控。洁净式机器人主要是穿上防护衣的关节型机器人,使其自身有良好的密封性,不把灰尘带入工作现场,自身也不会产生灰尘,他们主要应用于电子器件,食品和药品等生产中。国际对洁净机器人的洁净度有明确的定义。军用机器人主要是小型移动车,遥控飞机或电子
工业机器人_三自由度直角坐标工业机器人设计讲解
沈阳工程学院 课程设计 设计题目:三自由度微型直角坐标工业机器人模型设计 系别自控系班级 学生姓名学号 指导教师祝尚臻职称讲师 起止日期:2012年1 月2 日起——至2012 年1 月13 日止 - I -
沈阳工程学院 课程设计任务书 课程设计题目:三自由度直角坐标工业机器人设计 系别自动控制工程系班级 学生姓名 学号 指导教师职称讲师 课程设计进行地点:F430 任务下达时间:2011年12月31日 起止日期:2012 年1 月2日起——至2012 年1 月13日止教研室主任年月日批准 - II -
三自由度直角坐标工业机器人设计 1 设计主要内容及要求 1.1 设计目的: 1了解工业机器人技术的基本知识以及单片机、机械设计、传感器等相关技术。 2初步掌握工业机器人的运动学原理、传动机构、驱动系统及控制系统并应用于工业机器人的设计中。3通过学习,掌握工业机器人的驱动机构、控制技术,并使机器人能独立执行一定的任务。 1.2 基本要求 1要求设计一个微型的三自由度的直角坐标工业机器人; 2要求设计机器人的机械机构(示意图),传动机构、控制系统、及必需的内外部传感器的种类和数量布局。 3要有控制系统硬件设计电路。 1.3 发挥部分 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选; (2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 顺序阶段日期计划完成内容备注 1 2012.1. 2 讲解主要设计内容,布置任务打分 2 2012.1. 3 检查框图及初步原理图完成情况,讲解及纠正错误打分 3 2012.1. 4 检查机械结构设计并指出错误及纠正;打分 4 2012.1. 5 继续机械机构和传动机构设计打分 5 2012.1. 6 进行控制系统设计打分 6 2012.1.9 检查控制系统原理图设计草图打分 7 2012.1.10 完善并确定控制系统打分 8 2012.1.11 指导学生进行驱动机构的选择打分 9 2012.1.12 进行传感器的选择和软件流程设计打分 10 2012.1.13 检查任务完成情况并答辩打分 2011-12-30 - III -
浅析六轴工业机器人的控制方式及特点
浅析六轴工业机器人的控制方式及特点工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。 6轴工业机器人的全部控制由一台微型计算机完成。另一种是分散(级)式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力(力矩)控制。 6轴工业机器人的特点主要有以下几方面: (1)可编程:6轴工业机器人Biggist特点是柔性启动化,柔性制造系统中的一个重要组成部分。工业机器人可随其工作环境变化以及加工件的变化进行再编程,适合于小批量多品种具有均衡率的柔性制造生产线的应用。 (2)拟人化:6轴工业机器人结合机器人与人的特点。在6轴工业机器人的结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。其传感器提高了工业机器人对周围环境的自适应能力。 3)通用性:一般6轴工业机器人在执行不同的作业任务时具有较好的通用性。当然也有的工业机器人。 4)机电一体化:6轴工业机器人是机械学和微电子学的结合-机电一体化技术。工业机器人具有各种传感器可以获取外部环境信息,而且还具有记忆能力、语言理解能力、
图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是计算机技术的应用密切相关。 六轴关节工业机器人的研发设计及制造已经有好几十年的历史了,整个工业机器人的研发制造体系较为完善,各研发厂家在相互竞争中可以相互模仿、改善、不断推陈出新。博立斯多年来坚持投入研发、生产各类自动化设备,其中包括:数控车床机械手、上下料机械手、机床机械手、冲压机械手、6轴工业机器人、4轴工业机械手、多轴工业机器人等。多年来不断推陈出新,研发生产的自动化设备帮助许多企业解决了生产难题,备受企业的喜爱。
六自由度机器人结构设计
六自由度机器人结构设计、 运动学分析及仿真 学科:机电一体化 姓名:袁杰 指导老师:鹿毅 答辩日期: 2012.6 摘要 近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此 研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义 的。 典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在 生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合项 目的要求,设计了一种小型的、固定在AGV 上以实现移动的六自由度串联机器人。 首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择
其中最优的方案进行了结构设计;同时进行了运动学分析,用D-H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析,作出了实际工作空间的轴剖面。这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。最后用ADAMS 软件进行了机器人手臂的运动学仿真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了 经验。 第1 章绪论 1.1 我国机器人研究现状 机器人是一种能够进行编程,并在自动控制下执行某种操作或移动 作业任务的机械装置。 机器人技术综合了机械工程、电子工程、计算机技术、自动控制及 人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表,是当代科技发展最活跃的领域。机器人的研究、制造和应用正受到越来越多的国家的重视。近十几年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。 我国是从 20 世纪80 年代开始涉足机器人领域的研究和应用的。1986年,我国开展了“七五”机器人攻关计划。1987 年,我国的“863”计划将机器人方面的研究列入其中。目前,我国从事机器人的应用开发的主要是高校和有关科研院所。最初我国在机器人技术方面的主要
机器人的结构形式及各类结构的特点
机器人的结构形式及各类结构的特点 摘要:如今机器人已被广泛应用于机械、印刷机械、汽车工业、食品生产工业、药品生产工业、电子工业、机器制造业和化妆品生产等行业,不同领域因其需要的多样性和特殊性,也导致机器人在结构形式上存在多样性和特殊性。 关键字:结构形式,结构坐标系 2011302590173 刘亚辉 遥感信息工程学院
一、引言 机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。工业机器人按其结构形式及编程坐标系主要分类为关节型机器人、移动机器人、水下机器人和直角坐标机器人等。按主要功能特征及应用分为移动机器人、水下机器人、洁净机器人、直角坐标机器人、焊接机器人、手术机器人和军用机器人等。机器人学涉及到机器人结构,机器人视觉,机器人运动规划,机器人传感器,机器人通讯和人工智能等许多方面,不同用处的机器人涉及到不同的学科,下面仅对这些机器人的结构和应用进行简单介绍。 机器人按照结构坐标系特点方式分类可分为:直角坐标机器人,圆柱坐标型机器人,极坐标机器人,多关节机器人等。 机器人按照机身结构特点可分为:升降回转型机身结构,俯仰型机身结构,直移型机身结构,类人机器人机身结构等。 二、各种结构坐标系 1、直角坐标系机器人 直角坐标型机器人结构如图所示,它主要是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴,一般X轴和Y轴是水平面内运动轴,Z轴是上下运动轴。在一些应用中Z轴上带有一个旋转轴,或带有一个摆动轴和一个旋转轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。 直角坐标型机械手可以在三个互相垂直的方向上作直线伸缩运动,这类机械手各个方向的运动是独立的,计算和控制比较方便,但占地面积大,限于特定的应用场合,有较多的局限性。 2、圆柱坐标机器人 圆柱坐标型机器人的结构如下图所示,R、θ和x为坐标系的三个坐标,其中R、是手臂的径向长度,θ是手臂的角位置,x是垂直方向上手臂的位置。如果机器人手臂的径向坐标R保持不变,机器人手臂的运动将形成一个圆柱表面。
工业机器人的十一个问答
工业机器人的十一个问答 1、工业机器人定义及特点? 定义:机器人是一个在三维空间具有较多自由度的,并能实现诸多拟人动作和功能的机器:而工业机器人则是在工业生产上应用的机器人。 特点:可编程、拟人化、通用性、机电一体化 2、工业机器人有哪几个子系统组成?各自的作用是什么? 驱动系统:使机器人运行起来的传动装置。 机械结构系统:由机身手臂末端操作器三大件组成的一个多自由度的机械系统。 感受系统:由内部传感器模块和外部传感器模块组成获取内部和外部环境状态的信息。 机器人-环境交互系统:实现工业机器人与外部环境中的设备相互联系和协调的系统 人-机交互系统:是操作人员参与机器人控制与机器人进行联系的装置 控制系统:根据机器人的作业指令程序以及从传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能 3、什么是机器人的自由度?机器人位置操作需要几个自由度?姿态操作需要几个自由度?为什么? 自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度,在三维空间中描述一个物体的位置和姿态需要六个自由度,位置操作需要3个自由度(腰肩肘)姿态操作需要3个自由度(俯仰偏航侧滚)。但是工业机器人的自由度,但是工业机器人的自由度是根据其用途而设计的可能小于6个自由度,也可能大于6个自由度。 4、工业机器人的主要技术参数有哪些? 答:自由度、重复定位精度、工作范围、最大工作速度、承载能力 5、机身和臂部的作用各是什么?在设计时应注意哪些问题? 答:机身是支承臂部的部件,一般实现升降回转和俯仰等运动。
机身设计时需要注意: 1)要有足够的刚度和稳定性 2)运动要灵活,升降运动的导套长度不宜过短,避免发生卡死现象,一般要有导向装置 3)结构布置要合理臂部是支承腕部手部和工件的静动载荷的部件,尤其高速运动时将产生较大的惯性力,引起冲击,影响定位的准确性。 设计臂部时要注意: 1)刚度要求高 2)导向性好 3)重量轻 4)运动要平稳,定位精度要高。 其它传动系统应尽量简短以提高传动精度和效率;各部件布置要合理,操作维护要方便;特殊情况特殊考虑,在高温环境中应考虑热辐射的影响腐蚀性环境中应考虑防腐蚀问题。危险环境应考虑防暴问题 6、手腕上的自由度主要起什么作用?如果要求手部能处于空间任意方向则手腕应具有什么样的自由度? 手腕上的自由度主要是实现手部所期望的姿态。为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X Y Z的转动。即具有翻转俯仰和偏转三个自由度 7、手部的作用和特点 机器人手部的作用:工业机器人的手部也叫末端操作器是用来握持工件或工具的部件 特点: 1)手部是一个独立的部件 2)手部是工业机器人的末端操作器。不一定与人的手部结构相同。可以具有手指也可以不具有手指:可以有手爪也可以是专用工具
二自由度搬运机器人指标
题目名称二自由度搬运机器人结构设计 学生姓名蒋宁学号2011011606 所在系部机电工程系专业机械工程及自动化 第一指导教师王扬威教师号70206037 1.内容及要求: 二自由度搬运机器人具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。 随着自动化数控加工机床的发展,搬运机器人已成为提高劳动生产率的重要装备,二自由度搬运机器人的研制,将为加工中心提供一种快速、高效、运动平稳的上下料装置。 具体研究内容及要求包括: 1. 查找相关文献,分析上下料搬运机器人的研究现状和发展趋势。 2. 设计二自由度搬运机器人的机械结构,对其进行运动分析,并根据设计要求选用元器件和校核结构件强度。 3. 设计机械手的腕部结构,并进行运动分析。 2.主要技术指标: 1. 搬运机器人z轴行程1200mm,y轴行程1500mm。 2. 搬运机器人负载1t。 3. 最大运行速度300mm/s。 3.参考文献:《参考文献规范要求》 1.陶湘厅, 袁锐波, 罗璟. 气动机械手的应用现状及发展前景. 机床与液压[J], 2007, 35(18): 226~228. 2.赵碧, 巴鹏, 徐英凤. 气动上下料机械手手部结构的设计与分析[J]. 沈阳理工大学学报, 2006, 25(6): 58~60. 3.贺东坤, 田明. 气动通用上下料机械手结构设计[J]. 长春大学学报, 2012, 22(10): 1171~1173, 1180. 4.曹海燕, 周一届, 范增良, 欧阳焕. 上下料机械手柔性手腕的设计及位置误差分析[J]. 江南大学学报, 2012,11(1): 56~60. 5.王战中, 张俊, 季红艳, 赵赛, 臧丽超. 自动上下料机械手运动学分析及仿真. 机械设计与制造, 2012,(5):244~24 6. 6.刘金, 周志雄, 黄向明, 周德旺. 一种微细零件上下料机械手的设计与仿真. 计算机仿真, 2010, 27(2): 166~169,179. 4.毕业设计进度、任务安排: 2014.12.30 ~ 2015.02.24 完成文献查找,分析搬运机器人的研究现状和发展趋势; 2015.02.25 ~ 2015.03.30 完成二自由度搬运机器人的机械结构设计; 2015.03.31 ~ 2015.04.20 完成二自由度搬运机器人的运动分析和元器件选型,完成外文资料翻译工作; 2015.04.21 ~ 2015.05.25 完成机械手腕部结构设计,完成相关机械图,完成毕业设计报告,做好毕业答辩准备工作; 2015.05.26 ~ 2015.06.08 论文评审、答辩。
什么叫工业机器人
1.1什么叫工业机器人 1.1.1工业机器人定义 机器人发展至今天,对于机器人的定义仍然是仁者见仁,智者见智,没有一个统一的意见。原因之一是机器人还在继续发展,新的机型,新的功能不断涌现。下面将介绍国际上对于工业机器人给出的定义。 美国机器协会(RIA):机器人是“一种用于移动各种材料﹑零件、工具或专用装置的,通过程序动作来执行各种任务,并具有编程能力的多功能操作机(manipulator)”。 日本工业机器人协会:工业机器人是“一种装备有记忆装置和末端执行装置的、能够完成各种移动来代替人类劳动的通用机器”。它又分以下两种情况来定义: ●工业机器人是“一种能够执行与人的上肢类似动作的多功能机器”。 ●智能机器人是“一种具有感觉和识别能力,并能够控制自身行为的机器”。 国际标准化组织(ISO):机器人是“一种自动的、位置可控的、具有编程能力的多功能操作机,这种操作机具有几个轴,能够借助可编程操作来处理各种材料、零件、工具和专用装置,以执行各种任务”。 国际机器人联合会(IFR):“工业机器人(manipulating industrial robot)是一种自动控制的,可重复编程的(至少具有三个可重复编程轴)、具有多种用途的操作机”(ISO 8373)。 以上定义均为国际上对工业机器人的定义,我们可以这样理解工业机器人,就是面向工业领域的多关节机械手或多自由度机器装置。一般指用于机械制造业中代替人完成具有大批量、高质量要求的工作,如汽车制造、摩托车制造、舰船制造、某些家电产品(电视机、电冰箱、洗衣机)、化工等行业自动化生产线中的点焊、弧焊、喷漆、切割、电子装配及物流系统的搬运、包装、码垛等作业的机器人。
机器人参考答案
简述工业机器人的定义,说明机器人的主要特征。 答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。 1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。 2.机器人具有通用性,工作种类多样,动作程序灵活易变。 3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。 4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。 工业机器人与数控机床有什么区别 答:1.机器人的运动为开式运动链而数控机床为闭式运动链; 2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统; 3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。 4.机器人灵活性好,数控机床灵活性差。 简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。 答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。 重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率, 是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。 工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。 工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为 手臂末端最大的合成速度(通常在技术参数中加以说明)。 承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。 什么叫冗余自由度机器人 答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。 何谓轨迹规划简述轨迹规划的方法并说明其特点。 答:机器人的轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点位移,速度和加速度。 轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。 (1)示教—再现运动。这种运动由人手把手示教机器人,定时记录各关节变量,得到沿路径运动时各关节的位移时间函数q(t);再现时,按内存中记录的各点的值产生序列动作。 (2)关节空间运动。这种运动直接在关节空间里进行。由于动力学参数及其极限值直接在关节空间里描述,所以用这种方式求最短时间运动很方便。