门级驱动器设计
伺服驱动器硬件设计方案
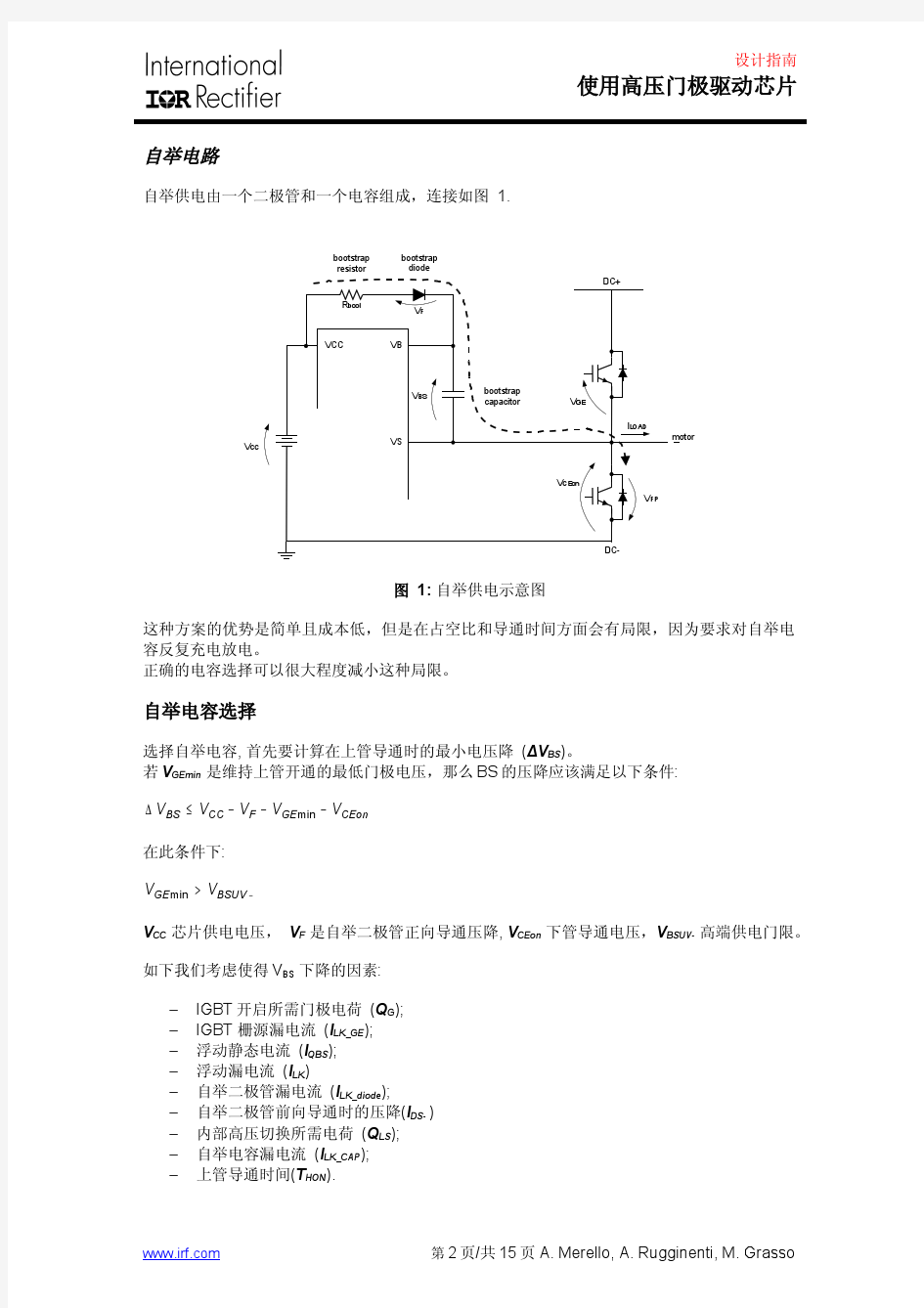
伺服驱动器硬件设计方案 伺服驱动器的硬件研发主要包括控制板和电源板的设计,控制板承担与上位机进行交互和实时生成精准的PWM信号。电源板的作用根据PWM信号,利用调制的原理产生特定频率,特定相位和特定幅值的三相电流以驱动电机以达到最优控制。 一控制板研发 1)控制板的架构主要的任务就是核心器件的选择。 安川、西门子等国际知名的公司都是采样ASIC的方式的芯片,这样就可以按照自己 的设计需要来制造专用于伺服控制的芯片,由于采样ASIC方式,所以芯片的运行速 度非常快,那么就比较容易实现电流环的快速响应,并且可以并行工作,那么也很 容易实现多轴的一体化设计。采样ASIC的方式有很多的好处,比如加密等。但是采 样ASIC的风险和前期的投入也是非常的巨大的,并且还要受该国的芯片设计和制造 工艺的限制。 根据我国的实际的国情和国际的因素等多种原因,核心芯片比较适宜采样通用的 DSP,ARM等处理器,比如Ti的C2000飞思卡尔的K60,英飞凌的XE164等。研究 台达的伺服驱动器发现其架构是采用Ti的DSP 2812+CPLD,这和我们公司GSK的方 案基本一样。我们也是采用DSP2812加CPLD(EPM570T144)来实现核心的控制功能。 2)核心器件的控制功能的分工。 DSP实现位置环、速度环、电流环的控制以及利用事件管理器PWM接口实现产生特 定的PWM信号。可以利用其灵活的编程特性快速的运算能力实现特定的控制算法等,还可以利用其自身的A/D完成对电机电流的转换,但是DSP自身的A/D精度普遍较 低,并且还受基准电压电源的纹波PCB的LAYOUT模数混合电路的处理技巧影响, 所以高档的伺服几乎都采用了外部A/D来完成电流采样的处理。比如路斯特安川等。 也有一些高档的伺服使用一些特殊的电流传感器,该传感器的输出已经是数字信 号,这样就可以节省了外部A/D芯片和增强抗干扰能力。如西门子的变频器采用 ACPL7860,发那克用于机器人的六驱一体的伺服也是采用了ACPL7860,西门子的伺 服S120采用了Ti的芯片AMC1203。 CPLD的作用是用来协助DSP以减少其自身的开销,比如完成速度的计算,位置的 计算,控制外部A/D对电机电流进行转换,因此当实现位置环速度环电流环所需要 的位置数据,速度数据,电流数据,那么DSP就可以直接从CPLD/FPGA处读取,不 需要耗费DSP的宝贵时间来计算这些数据。如果是增量式编码器采用M/T法测速效 果是最好的,但M/T法对DSP处理器的资源开销很大, 而CPLD/FPGA可以非常方便 使用M/T法进行测速。如果是绝对式编码器也可以非常方便采用CPLD/FPGA来解 析通信协议,并实现测速。一些高档的伺服也采用了CPLD/FPGA实现总线和以太网 功能。
270V高压大功率永磁同步电机驱动器设计
270V高压大功率永磁同步电机驱动器设计 摘要:近年来270V高压直流供电体制在各种装备上开始大量应用,本文给出了 一种由TMS320F2812、高精度转子位置速度检测装置及高压MOS管组成的高压 大功率永磁同步电机驱动控制方案,详细描述了系统的硬件组成和软件设计结构。试验结果表明,该系统较好的解决了高压供电带来的干扰问题,具有调速性能良好、效率高、抗干扰能力强等特点,满足型号的使用要求。 关键词:270V高压;永磁同步电机驱动器;抗干扰 0 引言 随着我国对高压直流电源系统的深入研究,新一代装备已开始采用270V高压直流供电系统,这种新型电源体制不但具有传输功率大、传输效率高、供电可靠 性高和电源配电重量轻的特点,而且还将大大减小低压直流供电系统的电器设备 的大电流电弧干扰,提高了武器装备的综合能力[1]。 本文给出了一种由TMS320F2812、高精度转子位置速度检测装置及高压MOS 管组成的大功率PMSM驱动控制方案,详细叙述了系统的硬件组成和软件设计结构。并在此基础上,设计了一套大功率PMSM驱动控制系统,该系统具有调速性 能良好,效率高等特点,满足型号的使用要求。 1 系统总体设计 1.1 永磁同步电机(PMSM)数学模型 永磁同步电机由于具备小体积、高效率及功率密度、调速性能良好等优点得 到了越来越广泛的应用。PMSM的数学模型包括电动机的运动方程,物理方程和 转矩方程,这些方程是永磁同步电机数学模型的基础。控制对象的数学模型能够 准确的反应被控系统的静态和动态特性。为方便分析,先做以下假设[2~4]: 1)磁路不饱和,即电机电感大小不受电流变化影响,不计涡流和磁滞损耗; 2)忽略齿槽、换相过程和电枢反应等的影响; 3)三相绕组完全对称,永久磁钢的磁场沿气隙周围正弦分布; 4)电枢绕组在定子内表面均匀连续分布; 5)驱动开关管和续流二极管为理想元件。 优化设计后的永磁同步电机经过Park变换后,其dq坐标系下的数学模型可 表示为方程式: 式1.1 式1.2 式1.3 式中:、—定子电压dq轴分量;、—定子电流dq轴分量; —定子电阻;—转子极对数; —转子角速度;—定子电感; —电磁转矩;—永磁体产生的磁链,为常数; 从电磁转矩方程可以看出只要能准确地检出转子空间位置(d轴),通过控 制逆变器使三相定子的合成电流在q轴上,那么永磁同步电机的电磁转矩只与定 子电流的幅值成正比,即控制定子电流的幅值,就能很好地控制电磁转矩。 1.2 驱动控制策略 永磁同步电机的控制策略有很多种,如直接转矩控制、转子磁场定向控制等[5~6],本系统采用转子磁场定向控制,其基本原理是通过坐标变换,在转子磁场 定向的同步坐标系上对电机的磁场电流和转矩电流进行解耦控制,使其具有和传
第2章-ABB-ACS800变频器的硬件组成
第2章 ABB ACS800硬件组成 ABB用R2,R3…直到R8来标记不同的外形规格、技术数据和尺寸图,外形规格不标在传动单元的型号标签上。传动单元的外形规格请参见选型手册技术数据章节的等级表一栏。 ACS800-01 ACS800-04 R2~R6 R7~R8 变频器由以下基本单元组成 1 整流单元
● 2 储能单元 ● 3 逆变单元 ● 4 制动单元 ● 5 控制单元 一整流单元 整流器与供电电网相连,将三相交流电整流为直流电,为中间直流环节提供能量。能量既能从电网流向直流环节,又能从直流环节流向电网。 ? 1 二极管整流 ? 2 二极管+晶闸管整流 ? 3 晶闸管反向并联整流 ? 4 IGBT整流
二储能单元 ? 1 电容储能 ? 2 电感储能 三逆变单元 ?IGBT 四控制单元
RDCU-02C或RDCU-12C RMIO-01C或RMIO-11C RMIO-02C或RMIO-12C 1功率板 AINP+AINT+APOW+AGDR-------R7,R8 + + AINP-01C AINT-02C APOW-01C + = RINT
AGDR-71C 2电路板连接图 主电路:完成对电机提供驱动功率的变换过程 电路板: 控制电路完成计算,通讯,数据采集和电机控制等功能。 3 诊断和控制盘接口板(ADPI) 板上有控制盘的连接座,红色指示灯和绿色指示灯,每个模块可以并联两块这样的电路板(用于平板式安装和书架式安装),控制盘即插即用,两个控制盘不能同时工作。
4 电机控制和I/O 板(RMIO-02C或RMIO-12C) 5 ACS800-04主电路板(AINT) 它的功能包括:
车门钣金设计规范
车门钣金设计规范
车门钣金设计规范 1.范围 本标准规定了车门钣金的术语、一般汽车车门钣金的设计规则以及设计方法。 本标准适用于各种轿车,其它车型可参考执行。 2.车门基本简介 2.1车门钣金概述 1.作为外覆盖件,起装饰作用,保证装配后外观效果,需保证翼子板、侧围、前后门之间的间隙平度满足要求; 2.有效保证车门密封性,避免出现漏水、风噪,导致顾客抱怨; 3.为开启件,需满足开启及关闭的易操作性; 4.车辆在行驶过程中保证车门始终处于关闭状态; 5.保证车门很容易的装配到车身骨架上; 6.为车身附件安装(外开把手、后视镜、外水切、昵嘈、内水切、门护板、门锁、扬声器、防水膜、升降器等安装)提供必要安装点及型面; 7.保证升降系统的正常运行; 8.保证行车门在行驶过程中不出现振动;不产生噪音; 9.车门售后可更换及可维修性; 10.具有承受一定作用力的刚度及强度 2.2车门结构类型 车门是车身的重要组成部分。根据车型不同,车门结构形式一般有旋开式车门如图2.1所示、滑动门以及外摆式车门等,还有一些轿车上使用了上下车极方便的鸥翼式车门。目前轿车车门使用最多的是旋开式车门,应用较多的轿车车门结构全尺寸内外板结构(整体式)、滚压窗框结构(分体式)以及半开放式车门结构(混合式),其结构具有各自不同的特点。 图2.1 旋开式车门
2.2.1整体式----即车门面板与门框部分一体成形。由全尺寸的冲压外板、全尺寸的冲压内板和嵌在内外板间的窗框导轨组成,导轨为U 字形滚压成型件,焊接在内板上,最后外板与内板总成通过包边方式闭合起来,这种车门板金结构在许多早期的车型被普遍采用。 优点:具有较好的完整性,整个车门的刚度较好,一体冲压出来的门板尺寸精度较高,并且加工工序较少、工艺简单。 缺点:窗框外边框通常较宽大,窗框的可装饰性不强,对造型有限制,不太符合现在造型的要求,而且全尺寸的门板需要较大的冲压模具,对冲压模的要求也比较高,整套模具的成本很高,由于窗框是一体冲压而成,废料面积较大,材料利用率较低。 图2.2 整体式车门 2.2.2分体式----车门本体由车门外板、车门内板和车门窗框构成。一般采用辊压成型的工艺生产车门窗框,然后与内板焊接,最后与外板压合或焊接成车门焊接总成。目前主要被日韩系车广泛采用,美系车也有少量采用,而欧洲车很少采用。 优点:这种结构窗框的宽度不受冲压和焊接的限制,可以设计的较窄,有利于车身造型,也有利于乘员视野,且滚压窗框的截面形状受工艺影响较小,可根据密封条或造型需要设计成多种形式。缺点:采用的滚压的车门框的断面一般都较复杂,成本较高,装配工艺复杂,尺寸公差尤其是外部面差保证的难度加大
基于STM32的无刷直流电机驱动器设计
基于STM32的无刷直流电机驱动器设计 利用主控制器STM32所具有的优势,设计无位置传感器无刷直流电机为控制对象的驱动器,包括功率驱动电路、三相逆变电路、反电动势检测电路和电流与电压监测电路。该驱动器设计成本较低,具有一定的应用价值。 标签:STM32;无位置传感器;无刷直流电机 1 概述 与8位单片机有限指令和性能相比,32位STM32处理器的工作频率达到72MHZ,处理能力达到1.25DMIPS,能实现高端运算能力;与32位DSP高成本和高功效相比,32位STM32处理器具有出众的功耗控制和明显价格优势,同时其内部高度集成,具有创新而丰富的外设,更加利于控制系统的开发。同时STM32中的STM32F103增强型系列具有专门为实现电机控制的高级定时器,以及转换速度为1MHZ、精度为12位的ADC[1]。 无刷直流电机既具有直流电机调速性能良好、运行效率较高等的特征,又具有交流电机构造简单、故障率低等的特点,具备两者优势,具有广阔应用前景。无刷直流电机分为有位置传感器和无位置传感器两种,两者相比,后者具有许多优势:缩小了无刷电机的体积和成本;增强了抗干扰能力,扩大在高温、高腐蚀性等特殊场合的使用范围;提高了系统可靠性,降低电机的维护工作量[2]。本设计以无位置传感器无刷直流电机为控制对象。 2 硬件设计 2.1 硬件总体结构 利用STM32较强控制性能及丰富外设,使硬件设计较为简单,所占空间较小,进一步降低成本,图1所示为驱动器硬件框图,以STM32为控制核心,包括电源电路、功率驱动电路、三相逆变电路、反电动势检测电路、电流监测电路、电压监测电路和串口通信电路。 在设计中选用STM32F103型号,其I/O口分配为:PA8端口(TIM1_CH1)、PA9(TIM1_CH2)端口和PA10(TIM1_CH3)端口分别与功率驱动电路的高边控制端HIN相连,PD9、PD10和PD11端口分别与低边控制端LIN相连;PA1(ADC1_IN1)、PA2(ADC1_IN2)和PA3(ADC1_IN3)端口与反电动势检测电路相连;PC0(ADC1_IN10)端口与电流监测电路相连;PC1(ADC1_IN11)端口与电压监测电路相连;PD5、PD6端口与通信电路相连;PC6、PC7端口分别与两个LED灯相连,作为警报信息;预留的IO管脚可用于后期的扩展开发。 2.2 电源电路设计
通用变频器的设计
摘要 使异步电动机实现性能好的调速一直是人们的理想,过去如变极调速、绕线转子异步电动机转子回路串电阻调速均属于有级调速;而调压调速虽能平滑调速,但调速范围不大,耗能多,仅限于小功率,无法和直流调速系统相比。随着新技术、新理论的不断发展,变频调速技术应运而生,其控制方式完全可以和直流调速系统相媲美。因此变频器的应用日益广泛,变频器性能的优劣直接影响着电机的运行特性,所以如何提高变频器的优化控制成为变频技术的关键。在变频调速中关键的一项就是控制端SPWM波的产生,它不仅要求电压和频率变化呈线性关系,而且要求输出波形尽可能接近于正弦波,特别是对于一些性能指标要求较高的全控型开关器件如IGBT等,其开关频率很高,因此就要求SPWM波发生器要达到一定的开关频率,基波频率也要求相对较高。为了解决这个问题,可以利用SLE4520这块集成芯片,来生成满足要求的SPWM波。本设计就是利用AT89C51单片机作为控制主机,与三相PWM集成芯片SLE4520配合工作,设置一种SPWM波生成的算法,通过单片机的定时模块产生脉冲,并将其送入SLE4520中,最后将SPWM脉冲送至逆变桥臂上下的IGBT中来控制逆变电路。本设计的优势在于可以通过键盘/显示来进行变频器的智能控制。在不同的工作状态下,可以显示不同的数据,再配合上各种故障保护电路,可以使得变频器安全的工作。 关键词:SLE4520 单片机 SPWM脉冲
ABSTRACT To achieve good performance asynchronous motor speed is ideal, such as speed regulating pole change motor rotor asynchronous and winding speed rotor circuit resistance of all belong to have stepless speed regulation, And although speed regulating speed can be smooth, but not more than energy-consuming, speed limits, only small power, compared with dc speed control system. With the new technology, the new theory of frequency conversion technology unceasing development, the control mode, and can completely Dc speed control system. But in the frequency conversion control is one of the key is the wave of SPWM not only requires the voltage and frequency variation, and the requirements of a linear relationship between output waveform in sine as close as possible, especially for some performance index to demand higher all-controlling switching device IGBT etc, such as the high frequency switching, so requires SPWM wave generator to reach a certain switching frequency wave frequency also require relatively high. In order to solve this problem, you can use SLE4520 this integration chip, to meet the requirements of SPWM wave generated.This design is to use AT89C51 as host, and three-phase PWM control SLE4520 integrated chips, setting an SPWM wave generated by MCU timing algorithms, and will produce pulses module to SLE4520, finally will SPWM inverter pulse to bridge the arm upper-and-lower IGBT inverter circuits to control. The design of the keyboard/strengths can display for converter intelligent control. In different working conditions, can show the different data, combined with the various fault protection circuit, can make the job security. Keywords:SCM(Single Chip Microcomputer)SLE4520 SPWM(Sinusoidal Pulse Width Modulation)
汽车门护板侧碰设计规范
汽车门护板侧碰设计规范美国高速公路安全保险协会(IIHS)侧部碰撞区域解释 IIHS车门侧碰区域图(前视图) 车门碰撞区域为IIHS侧碰试验方式(侧视图) 门内护板展开图 侧安全气囊展开图
在座椅行程范围内,门内护板与座椅之间应有足够空间展开气囊,同时门内护板不能有尖锐的棱角以及容易造成安全气囊损坏的棱角、棱边。 侧安全气囊与门板接触区域定义如下: 到最前边缘300mm处是安全气囊展开后的最前边缘。 侧安全气囊展开后的最前位置是由座椅向前移动之后停留在那个位置来确定安全前囊模块的最前位置。 侧安全气囊展开后的最后位置由座椅向后移动之后提留在那个位置来确定安全气囊模块的最后位置。 上边沿定义由安全气囊展开后的囊垫向上加50mm。典型结构,上边沿区域超过腰线。 L是R点行程(座椅行程)下边沿为基准边沿,评估安全气囊的下边沿是由安全气囊类型决定,见下表: 安全气囊类型L值 盆骨-胸腔或胸腔型75
胸腔或胸腔-头部型-70 在侧安全气囊与门板接触区域的装饰板必须在安全气囊低温爆破试验中有足够的强度或支撑结构。(见内饰板SDS必要条件#AA-0013,PB-0004和详情#12994)间区域1和区域2附录资料。 侧气囊垫最佳空间 最小50mm 侧气囊展开时 显示典型的侧气囊垫体积 侧气囊垫空间 侧气囊展开时的理想间隙最小50mm 。这个间隙受到测试的动力学的影响。使用者的运动(ATD的动作),门的变形,B柱的变形,座椅及靠背的运动将导致与静态(车辆静止)测量的不同。门系统上侧气囊传感器点火时间(依赖与很多因素)和裂开决定侧气囊在这个间隙展开的时间。安全研发小组负责分析决定特殊项目小组需要的最小间隙。 门饰板扶手高度 最大200mm, 最小140mm 扶手应当低于SIDⅡsATD’s胸部下肋骨,(最大扶手高度是UMTRI5%假人H点加200mm*sin12°.) 扶手最底高度位于UMTRI5%假人H点上140mm,规定与上腹肋重叠25mm。
变频器设计方法
变频器设计方法 一、变频调速系统设计的一般 性方法 (一)变频调速系统设计的内 容和步骤 变频调速系统设计的主要内容 和步骤如下: (1)控制系统总体方案设计, 明确系统的总体要求及技术条件。包括系统的基本功能、控制方案选 择以及性能指标(响应时间、稳态 精度、通信接口)等; (2)设计主电路拓扑结构,选 定逆变器件类型; (3)确定控制策略和控制方式; (4)选择主控制芯片; (5)选择各物理量的传感器和检测电路; (6)系统硬件设计,包括主电路模块、驱动与保护电路,与CPU 相关的电路、外围设备、接口电路、逻辑电路及键盘显示模块; (7)系统软件设计,包括应用程序的设计、管理以及监控程序的设计; 图4-25 变频调速系统的研发过程
(8)在各单元软硬件调试合格的基础上,进入系统实验与统调阶段。 变频调速系统的研制开发过程如图4-25所示。 (二)变频调速系统总体方案的确定 确定变频调速系统总体方案是设计系统的第一步。总体方案直接影响整个控制系统的投资、性能品质及实施难度。确定控制系统的总体方案必须根据实际应用的要求,结合具体被控对象而定。但在总体设计中还是有一定的共性,大体上可以从以下几个方面考虑。 1.选择主电路拓扑结构根据系统容量的大小以及实际要求选择合理的变频调速系统主电路拓扑结构。20世纪80年代以来,以GTO、BJT、MOSFET为代表的自关断器件得到长足的发展,尤其是以IGBT为代表的双极型复合器件的惊人发展,使得电力电子器件正沿着大容量、高频率、易驱动、低损耗、智能模块化的方向迈进。伴随着电力电子器件的飞速发展,逆变器主电路的结构也日趋多样化。 (1)普通三相变频器通常也称为二电平变频器,即第二章中所讲的交-直-交型变频器,这种拓扑结构比较简单,为了获得大功率可采用器件的串并联来实现。 (2)交-交变频电路普通二电平逆变器直流侧电压通常由交流电整流获得,因为存在直流环节,所以逆变器效率不高,主电路相对复杂。而交-交直接变频电路省去中间直流环节一次功率
门内饰板总成设计指南
模板编号: JN-0047-V1 汽车工程技术规范文件 前门内饰板总成 设计指南 Front Door trim Shield Design guide
目录 1.范围 (1) 2.设计指南引用文件 (1) 3.定义 (1) 4.设计指南内容 (2) 4.1组成结构、安装方式、常用材料和常用生产工艺 (2) 4.1.1组成结构 (2) 4.1.2安装方式 (3) 4.1.3前门内饰板常用材料 (3) 4.1.4门内饰板常用工艺 (4) 4.2前门内饰板设计关重项 (4) 4.3前门内饰板定位及安装点布置原则 (4) 4.4零部件设计 (5) 4.4.1内开手柄盒 (5) 4.4.2摇机手柄 (5) 4.4.3肘靠(平扶手面板) (6) 4.4.4喇叭孔(罩) (7) 4.4.5喇叭与面罩的安装距离; (9) 4.4.6玻璃升降器开关面板 (10) 4.4.7扶手盒 (11) 4.4.8立扶手 (12) 4.4.9储物盒(地图带) (13) 4.4.10吸音棉 (14) 4.4.11吸能块 (15) 4.4.12内开手柄布置要求: (16) 4.4.13门内饰板设计边界要求: (17) 4.4.14门内饰板密封条 (18) 4.4.15扶手包覆 (18) 4.4.16与内夹条搭接方式 (19)
4.4.17与车门钣金搭接方式 (20) 4.4.18与仪表板搭接方式 (20) 4.4.19与门槛配合方式 (21) 4.4.20与密封条配合方式 (22) 4.4.21与门灯配合方式 (22) 4.4.22防水薄膜 (23) 4.5模块化结构 (23) 4.5.1卡座模块化结构 (23) 4.5.2BOSS柱模块化结构 (24) 4.5.3焊接模块化结构 (25) 4.6常用标件 (26) 4.7前门内饰板性能指标 (26) 4.8前门内饰板常见问题 (26)
伺服驱动器主回路设计案例
案例库/单元二/工程设计 五、普及型CNC 电路设计案例(7221-5) 安川伺服和变频器是普及型CNC 机床最常用的伺服和主轴驱动器,本案例提供了国产普及型CNC 配套安川伺服和变频器的电路设计实例。 一、伺服驱动电路设计案例 【例1】某设备配套有安川ΣV 系列SGDV-120A01A 驱动器,利用主接触器控制主电源通断的驱动器主回路,及断路器、主接触器的选择方法如下。 根据要求设计的线路如图1所示。线路中的驱动器控制电源可在断路器合上后直接加入,主接触器需要在驱动器无故障(触点ALM+/ALM-接通)时,通过按钮S-ON 启动。 (a )驱动器主回路 (b )主接触器控制 图1 例1的主回路设计 根据驱动器型号,可查得SGDV-120A01A 驱动器的输入容量为2.3kV A ,断路器的额定电流可计算如下: )(28.13~96.93) 2~5.1(A U S I e e e == 根据断路器额定电流系列,可选择10A 标准规格,如DZ47-63/3P-10A 等。 主接触器的额定电流与断路器相同,可选择12A 标准规格,如CJX1-12/22等。 【例2】 某3轴经济型数控铣床使用了2台SGDV-120A01A 、1台SGDV-180A01A 驱动器,当驱动器需要同时通断时,其驱动器主回路设计如下。 根据要求,当多台驱动器的输入电源需要通过同一主接触器控制通断时,必须将各驱动器的故障输出触点串联后控制主接触器,设计的线路如图2所示,主接触器的控制回路同案例1。 AC 输入电源
AC输入电源 图2 例2的主回路设计 图2线路中,第1台驱动器的ALM-端连接继电器控制电源的0V端、ALM+端与第2台驱动器的ALM-端连接;第2台驱动器的ALM+端连接第3台驱动器的ALM-端;第3台驱动器的ALM+端连接故障检测中间继电器的线圈。线路只有在三台驱动器都无故障(故障触点输出接通)的情况下,KA1才能接通。 【例3】使用外部制动电阻的安川ΣV系列驱动器的主回路。 使用外部制动电阻的安川ΣV系列驱动器如图3所示。为了能够在制动电阻过热时切断驱动器主电源,制动电阻的过热触点(正常时闭合)作为主接触器接通的条件串联在线路中,过热触点一旦断开便可切断驱动器的主电源。 AC输入电源 图例3的主回路 【例4】ΣV系列驱动器与接近开关连接的输入电路,及接近开关的类型选择与输出驱
伺服驱动器原理应用及选型
伺服驱动器原理应用及选型 伺服驱动器简介伺服驱动器(servo drives)又称为伺服控制器、伺服放大器,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。 伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用。 在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括: 1)测速周期内必须检测到至少一个完整的码盘脉冲,限制了最低可测转速; 2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法保证测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能。 伺服驱动器原理伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化;功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入了软启动电路,以减小启动过程对驱动器的冲击。
1通用变频器的硬件电路设计
1通用变频器的硬件电路设计 1.1通用变频器的总体设计 本设计的系统以TI公司的TMS320LF2407A为控制核心,由主电路、系统保护电路和控制电路组成,其总体设计图如图3.1所示。 图1.1 基于DSP的通用变频调速系统总体设计图 其中主电路部分由整流电路、滤波电路、逆变电路(IPM)和IPM驱动电路与吸收电路组成。其工作原理是把单相交流电压通过不可控整流模块变为直流电压,整流后的脉动电压再经过大电容C1,C2平滑后成为稳定的直流电压。IPM逆变电路对该直流电压进行斩波,形成电压和频率均可调的三相交流电,提供给电机。
系统保护电路包括过压、欠压保护、限流启动、IPM故障保护与泵升控制等。过压、欠压保护是利用电阻分压采集母线电压,与规定值相比较;限流启动是由于开启主回路时,大电容充电瞬间引起的电流过大,这样可能会损坏整流桥,因此在主回路上串联限流电阻R1,当电容电压达到规定值时,启动继电器把R1短路,主回路进入正常工作状态;IPM故障保护是IPM内部集成的各种保护功能,包括过电流保护功能、短路保护功能、控制电源欠电压保护和管壳及管芯温度过热保护。把上述各种故障信号进行综合处理后形成总的故障信号送入DSP(TMS320LF2407A)的PDPINTA故障中断入口,进而封锁DSP的PWM波输出。 控制电路包括DSP最小系统电路、频率输入电路、光耦隔离电路等。最小系统由DSP本身和外扩的数据SRAM、程序SRAM、复位电路、晶振、译码电路、电源转换电路和仿真接口JTAG电路组成,仿真接口JTAG电路是为了实现在线仿真,同时在调试过程装载数据代码和程序代码;频率输入电路可以设置系统要输出的SPWM波的频率;光耦隔离电路是为了把DSP输出的弱电信号和主电路的强电信号进行可靠隔离。 1.2主电路的设计
汽车设计-车门外手柄设计规范模板
I 汽车设计- 车门把手设计规范模板XXXX发布
汽车车门把手设计规范 1.范围 本规范适用于XX公司汽车侧开式车门塑料外开把手(以下简称“外把手”),其他车门外把手(如:后背门把手)也可以参考使用。 2.术语 外开把手:装在汽车车门外侧,用来开启车门的装置。 3.规范性引用文件 下列文件对于本文件的应用是必不可少的,凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修订版)适用于本文件。 GB/ T 10125 人造气氛腐蚀试验盐雾试验 GB/T 12600 金属覆盖层、塑料上镍+铬电镀层 QC/T 625 汽车用涂镀层和化学处理层 4.外把手分类和结构 4.1 从外观看,外把手大致可以分为以下两种形式:翻转式和外拉式,如图1所示。 外把手的外观形式完全取决于造型,工程设计需满足造型。 因人的审美要求提高,近年来新开发了“隐藏锁芯”式把手。即取消左前门把手端盖锁芯圆孔,更改为可反复拆卸式端盖,需要用锁芯时候用机械钥匙片撬掉端盖即可(见图2) 翻转式外拉式 图1 外把手结构形式 4.2 从外把手与锁的连接方式看,可分为压杆连接和拉线连接,具体形式取决于锁体外开摇臂的要求以及锁体布置时摇臂与外把手摇臂旋转轴线的夹角。 4.3 外开把手组成部分 外拉式外把手包括:手柄外部,端盖,底座,大垫片,小垫片,摇臂及配重块和弹簧等,如图2所示:
图2 翻转式外把手包括:底座、掀盖、摇臂、垫片、销轴和弹簧等,如图3所示: 图3 以上为外把手的主要组成部分,具体到各车型会有所不同,但都是在这些结构上扩展而形成的,例如:外手柄扩展为上盖、下盖两部分,底座上设计有侧碰安全机构。 5.外把手人机要求
永磁同步伺服电机驱动器设计原理
永磁同步伺服电机(PMSM) 驱动器设计原理 周瑞华周瑞华先生,中达电通股份有限公司应用工程师。 关键词:PMSM 整流功率驱动单元控制单元 永磁交流伺服系统的驱动器经历了模拟式、模拟数字混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等缺点,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加可靠。现在,高性能的伺服系统大多数采用永磁交流伺服系统,其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。后者由两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是技术垄断的核心。 一交流永磁伺服系统的基本结构 交流永磁伺服系统主要有伺服控制单元、功率驱动单元、通信接口单元、伺服电机及相应的反馈检测器件组成。 其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等。我们的交流永磁同步驱动器集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化,是传统的驱动系统所 不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软起动电路,以减小起动过程对驱动器的冲击。 伺服驱动器大体可以划分为功能比较独立的两个模块,如图1所示。功率板(驱动板)是强电部分其中包括两个单元,一是功率驱动单元用于电机的驱动,二是开关电源单元为整个系统提供数字和模拟电源;控制板是弱电部分,是电机的控制核心也是伺服驱动器技术核心,控制算法的运行载体。控制板通过相应的算法输出PWM信号,作为驱动电路的驱动信号,来改变逆变器的输出功率,以达到控制三相永磁式同步交流伺服电机的目的。
伺服驱动器硬件设计
伺服驱动器的硬件设计 永磁同步电机伺服驱动器的硬件由控制部分和功率部分组成,控制电路以ARM为控制核心,包括编码器接口电路、外围接口电路等等。控制电路实现以下功能:获得相关指令信号和反馈信号,运行矢量控制算法,生成用于控功率模块的PWM信号。功率电路包括整流电路、逆变电路、能耗制动电路、电流采样电路、功率模块及其驱动电路、辅助电源等,用以实现能量的交流-直流-交流形式变换,驱动电机实现对电机力矩、速度、位置的精确控制。 一、编码器接口电路 本系统针对采用增量式编码器的伺服电机设计,增量式编码器共有六对差分输出信号:A+-、B+-、Z+-、U+-、V+-、W+-,如下图所示6对差分信号的处理电路,其中选用了芯片AM26C32芯片。 器接口电路首先由AM26C32解差分,然后再由后经过RC低通滤波电路进行整形,得到3.3V 电平的单端信号。最后得到的Y_A-、Y_B-、Y_Z-输出到XMC4500,以获得电机的位置和速度信息,Y_U-、Y_V-、Y_W-输出给单片机以获得伺服电机的初始相角信息。 二、主回路设计 本系统主要是采用交-直-交电压型逆变的器的形式,主要有不控整流电路滤波电容、电流检测电路、只能功率模块(IPM)及电流采样电路。主回路的结构框图如下:
(一)整流电路设计 本系统采用的是电容滤波的单相不可控整流电路,这部分电路由输入保护电路、整流桥如下图所示: 主回路侧有220V交流进来先接一个2A断路器,以防止过电流,起到保护作用。然后安规电容增加3个安全电容来抑制EMI传导干扰。交流电源输入分为3个端子:火线(L)/零线(N)/地线(G)。在火线和地线之间以及在零线和地线之间并接的电容,一般统称为Y电容。这两个Y电容连接的位置比较关键,必须需要符合相关安全标准,以防引起电子设备漏电或机壳带电,容易危及人身安全及生命。它们都属于安全电容,从而要求电容值不能偏大,而耐压必须较高,Y电容的取值为4700PF。在火线和零线抑制之间并联的电容,一般称之为X 电容。由于这个电容连接的位置也比较关键,同样需要符合相关安全标准。X电容同样也属于安全电容之一。根据实际需要,X电容的容值允许比Y电容的容值大,但此时必须在X电容的两端并联一个安全电阻,用于防止电源线拔插时,由于该电容的充放电过程而致电源线插头长时间带电。选X2电容,电容值为0.47uF. (二)储能稳压及滤波电路 (三)功率模块及其驱动和保护电路 三、辅助电源设计
硬件设计思路.doc
步进电机 随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。 步进电机是一种能够将电子脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步进电动机。单相步进电动机有单路电脉 冲驱动,输出功率一般很小,其用途为微小功率驱动。多相步进电动机有多 相方波脉冲驱动,用途很广。 使用多相步进电动机时,单路电脉冲信号可先通过脉冲分配器转为多相 脉冲信号,在经过功率放大后分别送入步进电机各项绕组。每输入一个脉冲 信号,电动机电动机各项的通电状态就发生变化,转子会转过一定的角度, 也就是步距角。 正常情况下步进电机转过的总角度和输入的脉冲的频率保持严格的对 应关系,不受电压波动和负载变化的影响。由于步进电机能直接接受数字量 的输入,所以特别适合微机控制。 步进电机的一些特点: 1.一般步进电机的精度为步进角的3-5%,且不累积。 2.步进电机外表允许的最高温度。 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃 至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。 3.步进电机的力矩会随转速的升高而下降。 当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率 越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相 电流减小,从而导致力矩下降。 4.步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有 啸叫声。
步进电机驱动器的设计
1 绪论 1.1 引言 步进电动机一般以开环运行方式工作在伺服运动系统中,它以脉冲信号进行控制,将脉冲电信号变换为相应的角位移或线位移。步进电动机可以实现信号的变换,是自动控制系统和数字控制系统中广泛应用的执行元件。由于其控制系统结构简单,控制容易并且无累积误差,因而在20世纪70 年代盛行一时。80 年代之后,随着高性能永磁材料的发展、计算机技术以及电力电子技术的发展,矢量控制技术等一些先进的控制方法得以实现,使得永磁同步电机性能有了质的飞跃,在高性能的伺服系统中逐渐处于统治地位。相应的,步进电机的缺点越来越明显,比如,其定位精度有限、低频运行时振荡、存在失步等,因而只能运用在对速度和精度要求不高,且对成本敏感的领域。 技术进步给步进电动机带来挑战的同时,也带来了新的发展遇。由于电力电子技术及计算机技术的进步,步进电动机的细分驱动得以实现。细分驱动技术是70 年代中期发展起来的一种可以显著改善步进电机综合性能的驱动控制技术。实践证明,步进电机脉冲细分驱动技术可以减小步进电动机的步距角,提高电机运行的平稳性,增加控制的灵活性等。由于电机制造技术的发展,德国百格拉公司于1973 年发明了五相混合式步进电动机,又于1993 年开发了三相混合式步进电动机。根据混合式步进电动机的结构特点,可以将交流伺服控制方法引入到混合式步进电机控制系统中,使其可以以任意步距角运行,并且可以显著削弱步进电机的一些缺点。若引入位置反馈,则混合式步进电机控题正是借鉴了永磁交流伺服系统的控制方法,研制了基于DSP的三相混合式步进电机驱动器。 1.2 步进电机及其驱动器的发展概况 按励磁方式分类,可以将步进电动机分为永磁式(PM)、反应式(VR)和混合式(HB)三类,混合式步进电动机在结构和原理上综合了反应式和永磁式步进电动机的优点,因此混合式步进电动机具有诸多优良的性能,本课题的研究对象正是混合式步进电机。20 世纪60 年代后期,各种实用性步进电动机应运而生,而半导体技术的发展则推进了步进电动机在众多领域的应用。在近30 年间,步进电动机迅速的发展并成熟起来。从发展趋势来讲,步进电动机已经能与直流电动机、异步电动机以及同步电动机并列,从而成为电动机的一种基本类型。特别是混合式步进电动机以其优越的性能(功率密度高于同体积的反应式步进电动机50%)得到了较快的发展。其中,60 年代德国百格拉公司申请了四相(两相)混合式步进电动机专利,70 年代中期,百格拉公司又申请了五相混合式步进电动机
伺服驱动系统方案设计
伺服驱动系统设计方案 伺服电机的原理: 伺服的基本概念是准确、精确、快速定位。与普通电机一样,交流伺服电机也由定子和转子构成。定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。伺服电机内部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度{线数)。 伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确。 交流伺服电机的工作原理和单相感应电动机无本质上的差异。但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 图3 伺服电动机的转矩特性
车门内板的设计
车门内板的设计过程研究汽车车门的介绍: 汽车车身属于汽车的3大总成之一,在汽车设计中占有极其重要的地位。车门作为汽车的重要组成部分,是车身侧面最富变化和最受人关注的对象。一方面,车门作为车身结构中的重要组成部分,其造型风格、强度、刚度、可靠性及工艺性等必需满足车身整体性能的要求;另一方面,车门结构自身的视野性、安全性、密封等性能,既对整个车身结构性能影响较大,也是车门功能要求的重要部分。 第一,对使用方便性来说,要求:开关方便性:灵活、轻便、自如,有最大、中间两档开度,并能可靠限位;上下车方便性:开度应足够,一般不低于60°或开度不小于650mm。 第二,对视野性来说,要求:尽量加大车门窗口及玻璃尺寸,并合理布置三角窗位置、大小、形状。 第三,对可靠性安全性来说,要求:足够的强度、刚度,不允许因变形、下沉而影响车门开关可靠性;车门开关时不允许有振动噪声;部件性能可靠、不干涉;撞翻车时不能自行开门,以确保乘员安全;满足侧撞时对乘员的保护要求。 第四,对密封性来说,要求:雨、雪、尘不能进入车内,应具备良好的气密封性。 第五,对工艺性维修性来说,要求:易于生产制造,拆装方便。 车门的结构类型多种多样。按开启方式可分为旋转门、拉门、折叠门和外摆式车门;按车门结构可分为整体式车门和分开式车门;按
有无窗框可分为有窗框和无窗框式车门;按旋转方向可分为顺开门、逆开门和上开门。而在本次的设计中我们设计的是比较普通的车门是由壳体、附件和内饰盖板组成。壳体按其结构可分为整体式或框架式。整体式车门的玻璃窗框是与门内、外板一体冲压的,框架式车门的玻璃窗框是用螺丝钉固定或焊接在门体上的。车门壳体是由厚度0.8- 1 0 mm 的钢板冲压的外板和内板等焊接而成。外板外型与整车协调,外板包着内板,沿着门的边缘形成一刚性箍。内板是车门的主要零件,在内板上冲有各种形状的窝穴、加强筋和孔洞,以便安装附件在安装完附件之后,用内饰板将其遮盖。车门附件包括车门铰链、车门开度限制器、带有内外操作手柄的门锁、定位器、车门密封条,在门内外板之间装有玻璃、玻璃导槽和导轨及玻璃升降器等。 车门的设计过程: 车门是车身结构中的一个分总成,对于车门的设计也应与车身总体设计相统一。在进行具体的车门设计前首先应根据整车参数,以同类型车为参考,进行车门部分的产品描述,确定车门类型,附件类型及种类。车门的设计过程一般如下: 产品描述: 应根据设计任务书和调研的分析结果对车门总成及零件进行描述; 确定输入和输出: 输入一般指:总布置提供的设计任务书;车身CAD 表面三维数