有机结构分析II大作业
波谱技术在有机化学反应机理中间体研究中的应用
1.引言
反应机理,即反应历程,是对反应物到产物所经历过程的详细描述和理论解释,特别是对中间体杂化状态、能量变化等的描述。而研究反应机理重要意义则在于:了解影响反应的各种因素,最大限度地提高反应的产率;发现反应的一些规律,指导研究的深入。在有机化学中,比较重要的反应历程有[1]:1、亲电反应历程;2、亲核反应历程;3、自由基反应历程。探讨研究反应历程(即反应机理),需要具有如下2个层次的意义:1、有机反应沿着不同的途径进行必然导致不同的产物,反应历程能指出反应分歧的内在原因,指导我们确定有利于目的产物的反应条件,有效地控制副反应。2、研究反应历程,也就是研究有机化学反应中旧键断裂和新键形成过程的实质,了解决定反应的内在和外在因素,以寻找合成产物的最佳原料和方法。
通常研究有机化学反应机理的重要手段之一就是研究有机反应历程中的活性中间体,其对反应进程的跟踪以及反应机理的探究都具有很重大的指导意义。那么,对于有机反应机理研究而言, 活性有机反应中间体的分离和鉴定对于理解和证明有机反应机理是非常重要的,如果能够检测到活性中间体的存在,那么这将是重要的证据。但在实际的大多数情况中,有机活性中间体是很难稳定存在的且几乎都不能分离。因此,关于有机反应活性中间体的非动力学研究方法主要有如下两种[2]:一、捕获然后检测,如自由基反应中,产生的自由基中间体可以由碘捕获,芳环亲核取代反应中,产生的苯炔中间体可由蒽捕获;二、利用活性中间体某些特殊的物理性质用原位红外、核磁共振、化学诱导动态核极化等仪器进行分析。本文就国内外化学工作者将波谱技术应用在有机化学反应机理研究中活性中间体检测、捕获和表征以及对有机化学反应机理的研究状况作以简介。本文将有机化学反应中间体分为3大类:1、中性自由基中间体;2、金属离子中间体;
3、非金属离子中间体。因此,本文从这3个方面入手,给出了部分波谱技术在有机化学反应机理研究方面的应用。
2. 波谱技术在有机化学反应机理中间体研究中的应用
2.1 波谱技术在中性自由基有机活性中间体检测中的应用
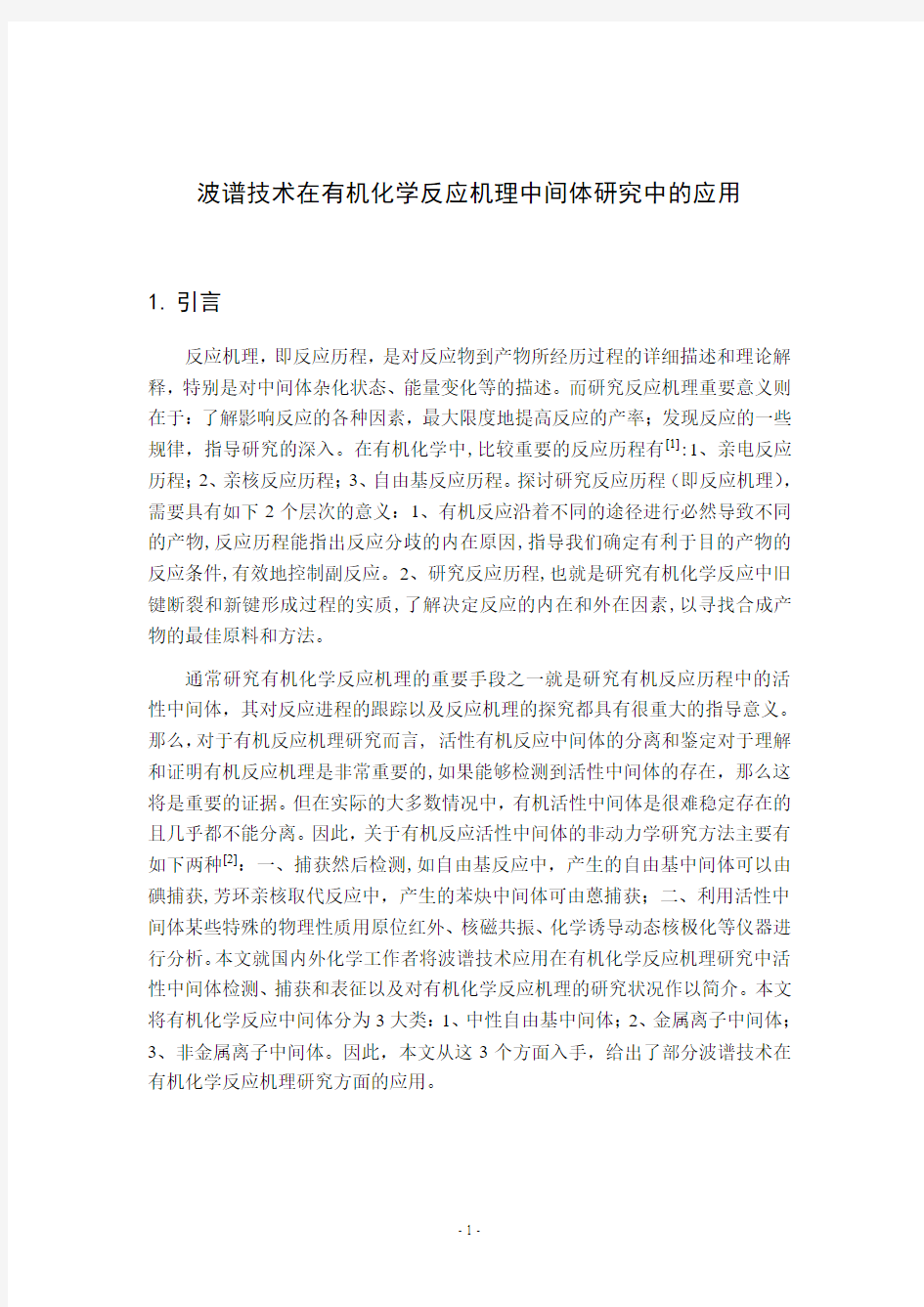
自由基有机活性中间体自发现以来,由于其为诸多重要有机反应如卤代反应、氧化反应、加成反应、格氏反应和电环化反应等的关键过渡态而备受人们关注。近代以来,化学家们通过光谱、磁学性质证实并研究了其在溶液中的各种性质。由于自由基中间体很不稳定,且自由基有机活性中间体是一类中性非金属中间体,不能用EIS-MS技术直接检测表征,故而这类活性中间体很难被分离并对其进行检测和表征。中国科学技术大学张玉根[3]文献报道了日本Hou-Wakkatsuki 研究组首次成功合成了一种自由基中间体配合物,并对其结构和性质分别进行了测定和表征。郭寅龙,王昊阳[4]等人将ESI/TOF-MS技术成功的应用于有机反应中自由基中间体的检测和表征。ESI/TOF-MS技术凭借其高灵敏度和低检出限,在捕获有机反应中的自由基活性中间体方面表现出来强大的优势。中国科学院上海有机化学研究所郭寅龙,张立[2]等人文献报道了Furmeier等人利用中性自由基反应通过作为Lewis酸与作为Lewis碱的金属螯合物介导作用,研究了在Lewis 酸存在下,锡氢化物自由基加成反应(Scheme 1)。反应底物1与Lewis酸Sc(OTf)3形成复合物,此复合物可被MS/MS检测到。反应过程中生成的自由基中间体2与Sc(OTf)3形成复合物A[2+Sc(OTf)]+和B[1+2+Sc2(OTf)5]+,而A和B均可被ESI-MS/MS检测到。通过对自由基中间体复合物的检测和表征,使得反应机理得到了进一步的研究和确认。
Scheme 1
Boris Rodenko等人[5]在研究嘌啉衍生物在硝酸四叔丁基铵和三氟乙酸酐的混合物中进行C2硝化反应时,采用6-氯-9-Boc-嘌啉4作为基准底物,发现在芳环C2位上进行硝化并非直接引入硝基,而是分为三个步骤:首先是硝酸三氟乙酰酯亲电进攻嘌啉N7位得到5,进而形成N7-硝胺中间体6,该中间体6经过重排后得到C2位硝化的中间化合物7,然后7立即脱去一分子的三氟乙酸得到化合物8,即2-硝基-6-氯-9-Boc-嘌啉6(Scheme 2)。他们在-50°C,用1H、13C、15N 和19F等核磁共振技术检测表征了反应过程中在N7位生成的活性中间体N7-硝胺。同时,他们还用15N-CIDNP研究了N7位硝胺重排的中间体(Scheme 3)。
Scheme 2
Scheme 3
Boris Rodenko等人还在TFAN稍过量的条件下,通过NMR监测了8-氧代嘌啉的形成(Scheme 4)。他们分别在6-氯-9-Boc-嘌啉直接硝化和硝胺中间体重排过程中检测到了信号,并利用NMR技术监测TBAN-TFAA嘌啉C2位硝化反
应并得到了该反应是通过N-硝化-加成-硝胺重排反应路径的结论。TFAN亲电进攻嘌啉N7位形成硝胺化合物,该化合物可被亲核试剂三氟乙酸负离子捕获,从而得到了中间体6,随即该硝胺嘌啉发生重排并消去一分子三氟乙酸给出产物2-硝基-6-氯-9-Boc嘌啉,而自由基中间体重排已为15N-CIDNP所证实。
Scheme 4
2.2 波谱技术在金属离子有机活性中间体检测中的应用
金属催化有机反应机理的过程中,由于其中间体具有很高的活性,对氧和水都非常敏感,因此常见的核磁共振、X射线衍射等方法在研究反应机理时,通常需要预先分离和处理活泼的中间体,这样不仅耗时,而且有时很难实现中间体的分离、表征以及对其机理的证明。郭寅龙,王昊阳[4]等人成功地将质谱技术(ESI-MS)应用于对Pd催化联烯与有机硼酸反应的研究。他们成功地捕获并表征了其中三个重要的中间体,从基元反应的角度提出并验证了该反应可能存在的机理。
Yinlong Guo[6]等人采用快速电喷雾电离(ESI)技术与串联质谱(MS/MS)技术联用并结合反应调控技术来研究复杂的有机化学反应体系,克服了传统方法以及质谱方法自身的缺点与不足,在无水无氧条件下,直接利用ESI-MS的方法研究了Pd(0)催化下,累积双键化合物13、碘苯14和亚胺化合物15在碱作用下发生三组分累积双键成环加成反应(Scheme 5),生产吡咯烷类化合物16的反应。起先,Yinlong Guo等推测该反应有2种可能的机理:1、碳钯化形成π-烯丙基钯化合物;
2、钯化合物还原消除机理。他们通过ESI-FTMS检测到了一系列的脱除碘负离子中间体,并降低反应速度,采取快速冷却电喷雾方法检测到了中间体金属离子19,并采用持续偏共振激发碰撞诱导解离(SORI-CID)方法以及同位素标记的方法
对合成的芳基碘化钯系列物的结够进行了表征,同时还研究了其相应的气相行为。最终,通过ESI-FTMS确定该反应机理(Scheme 6)为机理1的反应路径。
Scheme 5
Scheme 6
Toby Wai-Shan Chow [7]等人采用ESI-MS、同位素标记示踪和DFT计算方法研究了在铁络合物20([Fe III(L-N4Me2)Cl2]+,L=21)催化下,烯烃与过硫酸氢钾发生反应,生成顺式二羟基化产物的反应机理,并提出了在该反应进行的过程中,可能存在如下两种金属离子活性中间体:中间体22:反式-HO-Fe V=O;中间体23:反式-O=Fe V=O。他们预测了该反应可能存在的两种路径(Scheme 7):1、活性中间体22(反式-HO-Fe V=O)与烯烃反应,再经过中间体24得到二醇化物;2、活性中间体23(反式-O=Fe V=O) 与烯烃反应,再经过中间体25得到二醇化物。而经过DFT计算表明,由于中间体反式-HO-Fe V=O较反式-O=Fe V=O具有更小
的活化能,故而可能更有利于该反应的进行。Toby Wai-Shan Chow等人通过在研究过硫酸氢钾与烯烃的反应机理时,通过研究较为简单的过氧化氢和烯烃反应生成反式二羟基化合物的反应历程,来揭示过氧化物与烯烃的反应机理。他们发现该反应过程中包含了分别存在于有水环境中的活性中间体反式-HO-Fe V=O和无水环境中的Fe III-(η2-OOH)中间体。同时,在该反应中他们还发现了中间体反式-HO-Fe V(OH)2。
Toby Wai-Shan Chow等人利用ESI-MS/MS检测和表征中间体22、23、24和25,结果表明:相比于过氧化氢而言,过氧键O-O发生异裂生成高价态的金属氧键中间体,原因在于过硫酸氢钾较过氧化氢更为不对称,且过硫酸氢钾中SO42-较H2O2中OH-是更好的离去基团。他们以MeCN/H218O为溶剂采用同位素标记示踪法,通过EI-MS和1HNMR进行检测,结果表明:将化合物20转变为活性的5价铁氧化物,需要超过一个当量的过硫酸氢钾,而过量的过硫酸氢钾对于两种可能的路径都是支持的。DFT计算结果表明,反式的5价铁氧化物是烯烃的二羟基化物的直接中间体。
Scheme 7
武汉科技大学化学工程与技术学院徐珍等[8]文献报道了Donald等人通过NMR和晶学结构对Pd催化下卤素交换氟化反应机理进行了研究,并提出了可能的反应历程。Donald等人通过对中性中间体27[L n PdArX(X=Cl、Br)]的检测和表征,表明无论是水溶液还是固体,该中间体均表现为单体结果,从而得到了氟化反应机理,如图所示(Scheme 8)。首先,是卤代芳烃与Pd(0)化合物发生氧化加成;
其次,络合中间体28[L n PdArX(X=Cl、Br)]与氟化试剂,如HF、AgF等发生卤素交换,得到含氟的的钯有机化合物;最后,Pd化合物L n PdArF经还原消除构建C-F键,从而得到氟化产物。
Scheme 8
基于ESI-MS的离线反应检测方法可以有效捕获金属有机反应的活性中体,这可以为反应机理的研究提供有力的证据。但ESI-MS检测方法存在两个缺点:1、在稀释溶液是虽可避免对质谱仪的污染,但却可将反应终止;2、当反应液浓度较低时,导致反应速率大为降低,这使得检测时间大为延长。清华大学马潇潇等人[9]基于ESI-MS,以DESI为离子化方法,利用其高速雾化气实现连续进样,研究了金配合物[(bpy)AuCl2]AuCl4作为催化剂催化下的29N-苯基-1,2,3,4-四氢喹啉与30硝基甲烷的氧化偶联反应。其偶联反应方程式(Scheme 9)如下:
Scheme 9
马潇潇等在研究该反应机理的过程中,通过DESI-MS分析了N-苯基-1,2,3,4-四氢异喹啉的甲醇溶液和N-苯基-1,2,3,4-四氢异喹啉与金配合[(bpy)AuCl2]AuCl4的混合溶液,发现亚胺离子C只能在混合溶液中检测到,在N-苯基-1,2,3,4-四氢异喹啉的甲醇溶液中检测不到。因此,他们认为在氧化偶联反应中,首先是金配合
物[(bpy)AuCl 2]AuCl 4催化剂氧化了N -苯基-1,2,3,4-四氢异喹啉,夺走了H +,形成亚胺离子,而自身的 Au (III )被还原成 Au (I )。他们从而得
出结论:N -苯基-1,2,3,4-四氢异喹啉与硝基甲烷的氧化偶联反应
机理的第一步应当是N -苯基-1,2,3,4-四氢异喹啉发生电子转移
亚胺离子C 和H 转移,将H 转移给Au ,而自身被还原。在此之后,硝基甲烷与氧化后的N -苯基-1,2,3,4-四氢异喹啉在Au 的催化下快速生成反应物。
2.3 波谱技术在非金属离子有机活性中间体检测中的应用
中国石化石油化工科学研究院何奕工等人[10]文献报道了美国化学家George Olah 早在1963年,便在实验中利用NMR 技术,并直接观察到了简单的烷基碳
正离子。George
Olah 将烷基氟溶于
强Lewis 酸SbF 5
中,然后用NMR
对其进行研究,发
现纯(CH 3)3CF 信号
1与溶于SbF 5中
(CH 3)3CF 的信号完
全不同(Scheme
10)。在纯(CH 3)3CF 的 Scheme 10 (CH 3)3CF 溶于SbF 5中的NMR 谱图 NMR 谱中,由于质子信号受邻近氟的偶合作业,裂分成双峰,而SbF 5中(CH 3)3CF 的NMR 谱图则是向低场方向发生了位移的单峰,没有裂分。显然,这是因为(CH 3)3CF 与SbF 5发生了离子化反应而生成了碳正离子,即碳正离子中间体。George Olah 通过对该中间体的捕捉鉴定以及研究,证实了碳正离子中间体的存在,并为研究碳正离子结构开辟了新道路。
(CH 3)3CF 与SbF 5发生离子化反应生成碳正离子反应方程式:
-+?→?+65SbF R SbF FF
自由基阳离子中间体是一类重要的有机化学反应活性中间体。中国科学院上海有机化学研究所张立[2]等文献报道了Meyer 和Metezger 等利用ESI-MS/MS 的方法对[2+2]-反式茴香脑环加成反应机理进行了研究(Scheme 11)。通过对不稳定中间体的34和35的分析,发现当33?SbCl 6-和32的反应液进行ESI-MS 检测,就可以观测到自由基阳离子33的信号,而底物32和产物36则没有检测到相应
的离子化产物。Meyer和Metzger等人通过ESI-MS/MS技术对自由基阳离子34和35的检测和表征,从而为证明该反应机理给出了强有力的证据。
Scheme 11
3 结论与展望
在研究有机化学反应机理时,科学家们发展出了多种技术与方法,包括三维动画(3DMAX)模拟、量子化学密度泛函理论(DFT)计算、开壳层密度泛函(UB3LYP)方法、扫描电子显微镜(SEM)、能量色散X射线光谱(EDX)、X-射线衍射仪(XRD)、原子力显微镜(AFM)、电喷雾质谱(ESI-MS)以及原位红外光谱(TP-IR)等。利于以上技术可以检测、捕获以及表征在有机化学反历程中可能产生的活性中间体。尤其是波谱技术,在检测短寿命、不稳定活性中间体方面有着独特的优势,其高检测灵敏度以及低检出限可以避免由于样品浓度而引入的背景误差;其高分辨率,可以对结构相似的中间体做出准确的判定,从而为推断有机反应机理提供强有力的证据。当然,波谱技术也存在其缺点,如结构精细操作复杂,操作维护费用高等。
近些来,ESI-MS凭借着能够迅速检测离子物种并保持其完整性的能力为研究有机反应的活性中间体提供了可能,在已开展的研究中,捕捉表征了一系列有机反应中重要的中间体离子,为分析中间体结构和研究机理提供宝贵的线索。我们有理由相信,在不远的将来,ESI-MS技术将凭借其优势而成为检测表征有机中间体的主流方法。
参考文献
[1] 高绪艳.化学反应机理在有机化学反应中的应用[J]. 内蒙古电大学刊2002,4: 111-112
[2]张立,钱荣,郭寅龙等. 电喷雾质谱法在研究有机反应中间体方面的应用[J]. 有机化学2008,28(3): 372~380
[3] 张玉根. 自由基反应中间体的金属离子配位捕获[J].化学通报1999,9:48~50
[4] 郭寅龙,王昊阳,张祥等. 质谱法研究有机反应活性中间体[J]. 质谱学报2006,27(S): 63~64
[5] Boris R.; Melle K.; Alida M.; Martin J.; Gerrit-Jan K.J. Am. Chem. Soc.2005, 127, 5957-5963
[6] Yinglon G.; Hao G.; Rong Q.; Yuanxi L.; Shengming M.J. Am. Chem. Soc. 2005, 127, 13060-13064
[7] Toby Wai-Shan C.; Ella Lai-Ming W.; Zhen G.;Yungen L.; Jie-Sheng H.; Chi-Ming
C.J. Am. Chem. Soc. 2010, 132, 13229–13239
[8] 徐珍,吕早生. Pd催化的有机氟化反应研究进展[J]. 化工进展2013, 32(7): 1547-1554
[9] 马潇潇,张新荣. 基于敞开式离子源的质谱在线反应方法研究[D]. 清华大学2012,4
[10] 何奕功,舒兴田,龙军. 正碳离子和相关反应机理[J]. 石油学报(石油加工) 2007,23(4): 1-7
数值分析大作业-三、四、五、六、七
大作业 三 1. 给定初值 0x 及容许误差 ,编制牛顿法解方程f (x )=0的通用 程序. 解:Matlab 程序如下: 函数m 文件:fu.m function Fu=fu(x) Fu=x^3/3-x; end 函数m 文件:dfu.m function Fu=dfu(x) Fu=x^2-1; end 用Newton 法求根的通用程序Newton.m clear; x0=input('请输入初值x0:'); ep=input('请输入容许误差:'); flag=1; while flag==1 x1=x0-fu(x0)/dfu(x0); if abs(x1-x0) while flag1==1 && m<=10^3 x1=x0-fu(x0)/dfu(x0); if abs(x1-x0) 机械可靠性设计大作业 题目:扭杆 姓名:刘昀 班号: 05021104 学号: 59 日期:机械可靠性设计大作业 一、题目: 扭杆:圆截面直径D为(μ,σ)=(20,)mm,受扭矩T为(μ,σ)=(677400,),工作循环次数N≥4000,材料疲劳极限S为(μ,σ)=(,)MPa。 二、思路: 给定强度分布与应力有关的随机参数分布条件,确定应力计算公式,计算相应的分布参数,假定各随机变量都服从正态分布。然后根据应力--强度干涉理论计算可靠度,主要考虑载荷的均值与方差两项变化可靠度如何变化,以上要求编程实现。 三、输入的数据:扭矩T的均值与标准差T(μ),T(σ) 四、输出的结果:可靠度R 五、计算的模型: (1)几何参数(扭杆圆截面直径)D、扭矩T和工作循环次数大于等于4000时的材料疲劳极限,亦即此时的疲劳强度S,均为随机变量且服从正态分布; (2)应力--强度干涉模型: 大多数机电产品的应力和强度都是服从一定统计分布规律的随机变量,我们用L表示应力,S表示强度。它们的概率密度函数f(S)和f(L)两曲线出现部分交叉和重叠,亦即出现干涉时,有可能出现强度小于应力的情况,但可把这种引起失效的概率限制在允许的范围内。在干涉的情况下,我们研究的是如何在保证一定可靠度的前提下,使零件结构简单、重量较轻,价格较低。 对于强度和应力均为正态分布时,我们采用联结方程来计算可靠度,公式如下: SM称为可靠性系数,在已知、、、的条件下,利用上式可直接计算出SM,根据SM从标准正态分布表中查出可靠度R的值。也即: 六、程序流程图 Y 七、算例分析结果说明及结论 (1)程序运行结果 T(μ)↑,T(σ)不变时,可靠度R的变化情况:T(μ) T(σ) R 120677 180677 240677 300677 360677 420677 480677 大作业 三 1. 给定初值 0x 及容许误差 ,编制牛顿法解方程f (x )=0的通用程序. 解:Matlab 程序如下: 函数m 文件:fu.m function Fu=fu(x) Fu=x^3/3-x; end 函数m 文件:dfu.m function Fu=dfu(x) Fu=x^2-1; end 用Newton 法求根的通用程序Newton.m clear; x0=input('请输入初值x0:'); ep=input('请输入容许误差:'); flag=1; while flag==1 x1=x0-fu(x0)/dfu(x0); if abs(x1-x0) while flag==1 sigma=k*eps; x0=sigma; k=k+1; m=0; flag1=1; while flag1==1 && m<=10^3 x1=x0-fu(x0)/dfu(x0); if abs(x1-x0) end end fprintf('最大的sigma 值为:%f\n',sigma); 2.求下列方程的非零根 5130.6651()ln 05130.665114000.0918 x x f x x +?? =-= ?-???解: Matlab 程序为: (1)主程序 clear clc format long x0=765; N=100; errorlim=10^(-5); x=x0-f(x0)/subs(df(),x0); n=1; 数值分析作业答案 插值法 1、当x=1,-1,2时,f(x)=0,-3,4,求f(x)的二次插值多项式。 (1)用单项式基底。 (2)用Lagrange插值基底。 (3)用Newton基底。 证明三种方法得到的多项式是相同的。 解:(1)用单项式基底 设多项式为: , 所以: 所以f(x)的二次插值多项式为: (2)用Lagrange插值基底 Lagrange插值多项式为: 所以f(x)的二次插值多项式为: (3) 用Newton基底: 均差表如下: xk f(xk) 一阶均差二阶均差 1 0 -1 -3 3/2 2 4 7/ 3 5/6 Newton插值多项式为: 所以f(x)的二次插值多项式为: 由以上计算可知,三种方法得到的多项式是相同的。 6、在上给出的等距节点函数表,若用二次插值求ex的近似值,要使截断误差不超过10-6,问使用函数表的步长h应取多少? 解:以xi-1,xi,xi+1为插值节点多项式的截断误差,则有 式中 令得 插值点个数 是奇数,故实际可采用的函数值表步长 8、,求及。 解:由均差的性质可知,均差与导数有如下关系: 所以有: 15、证明两点三次Hermite插值余项是 并由此求出分段三次Hermite插值的误差限。 证明:利用[xk,xk+1]上两点三次Hermite插值条件 知有二重零点xk和k+1。设 确定函数k(x): 当或xk+1时k(x)取任何有限值均可; 当时,,构造关于变量t的函数 显然有 在[xk,x][x,xk+1]上对g(x)使用Rolle定理,存在及使得 在,,上对使用Rolle定理,存在,和使得 再依次对和使用Rolle定理,知至少存在使得 而,将代入,得到 推导过程表明依赖于及x 综合以上过程有: 确定误差限: 记为f(x)在[a,b]上基于等距节点的分段三次Hermite插值函数。在区间[xk,xk+1]上有 而最值 进而得误差估计: 16、求一个次数不高于4次的多项式,使它满足,,。 吉林大学网络教育学院 2019-2020学年第二学期期末考试《电力系统分析》大作业 学生姓名专业 层次年级学号 学习中心成绩 年月日 作业要求:大作业要求学生手写完成,提供手写文档的清晰扫描图片,并将图片添加到word文档内,最终wod文档上传平台,不允许学生提交其他格式文件(如JPG,RAR等非word文档格式),如有雷同、抄袭成绩按不及格处理。 一计算题 (共9题,总分值90分 ) 1. 有一台型10kv网络供电的降压变压器,铭牌给出的试验数据为:。 试求(1)计算折算到一次(二次)侧的变压器参数,并作其Г型Π型等值电路 变压器不含励磁之路时的Π型等值电路。(10 分) 2. 降压变压器及等效电路示于图5-7a、b。折算至一次侧的阻抗为Ω。已知在最大负荷和最小负荷时通过变压器的功率分别为,一次侧的电压分别为=110KV和113KV。要求二次侧母线的变化不超过6.0—6.6KV的范围,试选择分接头。 图5-19 习题5-8a 5-8b (10 分) 3. 简单电力系统如图7-52习题7-7所示,已知元件参数如下:发电机:,=0.16, =0.19;变压器:,=10。5,k点分别发生单相接地、两相短路、两相接地和三相短路时,试计算短路点短路电流的有名值,并进行比较分析。 图7-52 习题7-7(10 分) 4.已知一200km长的输电线,R=0.1Ω/km,L=2.0mH/km,C=0.01μF/km,系统频率为50Hz。使用(1)短线路,(2)中程线路,(3)长线路模型求其π形等效电路。(10 分) 解: (1)短线路一字型等值电路参数: (2)中程线路∏形等值电路参数(不需修正): (3)长线路: 数值分析报大作业 班级:铁道2班 专业:道路与铁道工程 姓名:蔡敦锦 学号:13011260 一、序言 该数值分析大作业是通过C语言程序编程在Microsoft Visual C++ 6.0编程软件上运行实现的。本来是打算用Matlab软间来计算非线性方程的根的。学习Matlab也差不多有一个多月了,感觉自己编程做题应该没什么问题了;但是当自己真心的去编程、运行时才发现有很多错误,花了一天时间修改、调试程序都没能得到自己满意的结果。所以,我选择了自己比较熟悉的C程序语言来编程解决非线性的求值问题,由于本作业是为了比较几种方法求值问题的收敛速度和精度的差异,选择了一个相对常见的非线性函数来反映其差异,程序运行所得结果我个人比较满意。编写C语言,感觉比较上手,程序出现问题也能比较熟练的解决。最终就决定上交一份C程序语言编程的求值程序了! 二、选题 本作业的目的是为了加深对非线性方程求根方法的二分法、简单迭代法、、牛顿迭代法弦截法等的构造过程的理解;能将各种方法的算法描述正确并且能够改编为程序并在计算机上实现程序的正确合理的运行,能得到自己满意的结果,并且能调试修改程序中可能出现的问题和程序功能的增减修改。本次程序是为了比较各种方法在求解同一非线性方程根时,在收敛情况上的差异。 为了达到上面的条件我选择自己比较熟悉的语言—C语言来编程,所选题目为计算方程f(x)=x3-2x-5=0在区间[2,3]内其最后两近似值的差的绝对值小于等于5 ?的根的几种方法的比较。 110- 本文将二分法、牛顿法、简单迭代法、弦截法及加速收敛法这五种方法在同一个程序中以函数调用的方式来实现,比较简洁明了,所得结果能很好的比较,便于分析;发现问题和得出结论。 一、简述题(每小题10分,共100分) 1、在进行技术经济分析时为什么强调可比原则?有哪些可比原则必须考虑? 2、试分析投资项目财务分析中全投资财务效果评价与自有资金财务效果评价有何不同? 3、建设项目财务评价中动态指标有哪些? 4、全投资财务效果和自有资金现金财务效果有什么不同? 5、一般项目的可行性研究要包括哪些内容? 6、资金约束条件下独立方案选择比较的一般步骤是什么? 7、单因素敏感性分析一般包括哪些步骤? 8、试述标准投资回收期的确定方法。 9、比较经济效果与经济效益有何联系与区别? 10、备选方案选优时间可比的含义是什么? 1、解答:方案是互相排斥的,具有可比性的方案才能进行比较,决定取舍才能得出准确的结论。考察时间段及计算期的可比性;收益与费用的性质及计算范围的可比性;方案风险水平的可比性和评价所使用假设的合理性。 2、解答:当全投资内部收益率大于贷款利率时,自有资金内部收益率大于全投资内部收益率且贷款比率越高自有资金的内部收益率越高;当全投资内部收益大于基准折现率,且基准折现率大于借款利率时,自有资金净值大于全投资净现值。 3、解答:财务评价应该依据国家计委和建设部颁发的《建设项目评价方法与参数》(第三版)编制,比较重要的参数有总投资收益率、总投资利税率、资本金净利润率、税后回收期和财务净现值等。 财务评价是从企业角度出发,使用的是市场价格,根据国家现行财税制度和现行价格体系,分析计算项目直接发生的财务效益和费用,编制财务报表,计算财务评价指标,考察项目的盈利能力,清偿能力和外汇平衡等财务状况,借以判别项目的财务可行性。 4、解答:内部收益率是资金流入现值总额与资金流出现值总额相等,净现值等于零时的折现率。它是一项投资可望达到的报酬率,该指标越大越好。一般情况下,内部收益率大于等于基准收益率时,该项目是可行的。投资项目各现金流量的折现值之和为项目的净现值,净现值为零时的折现率就是项目的内部收益 目标:使用带双步位移的QR 分解法求矩阵10*10[]ij A a =的全部特征值,并对其中的每一个实特征值求相应的特征向量。已知:sin(0.50.2)() 1.5cos( 1.2)(){i j i j ij i j i j a +≠+== (i,j=1,2, (10) 算法: 以上是程序运作的逻辑,其中具体的函数的算法,大部分都是数值分析课本上的逻辑,在这里特别写出矩阵A 的实特征值对应的一个特征向量的求法: ()[]()() []()[]()111111I 00000 i n n n B A I gause i n Q A I u Bu u λλ-?-?-=-?-?? ?-=????→=??????→= ?? ? 选主元的消元 检查知无重特征值 由于=0i A I λ- ,因此在经过选主元的高斯消元以后,i A I λ- 即B 的最后一行必然为零,左上方变 为n-1阶单位矩阵[]()()11I n n -?-,右上方变为n-1阶向量[]()11n Q ?-,然后令n u 1=-,则 ()1,2,,1j j u Q j n ==???-。 这样即求出所有A所有实特征值对应的一个特征向量。 #include 汽车制动系统可靠性分析 摘要:随着经济的发展,汽车数量迅速增长,同时道路交通事故就严重影响人们的安全,人人谈虎变色。作为道路交通事故发生的非人为因素中选取所占比例最大的汽车制动系统故障,减小这种因素引起的故障成为保障道路交通安全中的至关重要的一部分。本文运用系统工程的可靠性分析的方法对此类故障进行研究分析。同时基于故障树分析法开展了对汽车制动系统的可靠性分析,通过对系统零部件的故障因素,故障原因和故障种类进行定性的分析,为汽车制动系统的设计和维修提供了理论依据,对提高汽车制动系统的可靠性及减少因汽车制动系统而导致的道路交通事故起到了积极的指导作用。 关键词:道路交通事故汽车制动系统可靠性分析故障树分析法 引言: 自从1885年卡尔本茨(Karl Benz)在曼海姆制出了第一辆汽车以来,道路交通安全则成为所有人共同关心的话题。纵观道路交通事故发生的原因,除了与道路的使用者——人的因素、道路本身的因素、道路交通环境因素有关外,还与道路上行驶的车的因素有关。其中减少人为因素引起的事故需要所有交通参与者的仔细观察和相互谦让。而减少非人为因素造成的道路安全事故则成为减少道路交通事故保证驾驶安全的最重要的一部分。车辆是组成道路交通的三大因素之一,与交通安全有着密切的关系。虽然在交通事故原因的统计中,人为原因占很大比例,直接因汽车问题所引起的事故不足10%,但这并不意味着车辆对安全的影响不大。而在这些非人为因素中,汽车制动系统发生故障占60%-70%。因此,对汽车制动系统进行可靠性分析,提高汽车制动系统的可靠度,可以减少道路交通事故的发生,减少不必要的损失,也保证了所有交通参与者的安全。对于保护国家集体的财产安全,维护交通秩序,提高道路交通能力具有极其重要的意义]1[。 1995年机械故障事故统计表 故障种类制动失效制动不良转向失效灯光不良其他 事故次数3545 54421299688 2520 数值分析大作业(2013年5月) 金洋洋(12721512),机自系 1.下列各数都是经过四舍五入得到的近似值,试分别指出它 们的绝对误差限, 相对误差限和有效数字的位数。 X1 =5.420, x 2 =0.5420, x 3=0.00542, x 4 =6000, x 5=50.610? 解:根据定义:如果*x 的绝对误差限 不超过x 的某个数位的半个单位,则从*x 的首位非零数字到该位都是有效数字。 显然根据四舍五入原则得到的近视值,全部都是有效数字。 因而在这里有:n1=4, n2=4, n3=3, n4=4, n5=1 (n 表示x 有效数字的位数) 对x1:有a1=5, m1=1 (其中a1表示x 的首位非零数字,m1表示x1的整数位数) 所以有绝对误差限 143 11 (1)101022 x ε--≤ ?=? 相对误差限 31() 0.510(1)0.00923%5.4201 r x x x εε-?= == 对x2:有a2=5, m2=0 所以有绝对误差限 044 11 (2)101022 x ε--≤ ?=? 相对误差限 42() 0.510(2)0.00923%0.54202 r x x x εε-?= == 对x3:有a3=5, m3=-2 所以有绝对误差限 235 11 (3)101022 x ε---≤ ?=? 相对误差限 53() 0.510(3)0.0923%0.005423 r x x x εε-?= == 对x4:有a4=0, m4=4 所以有绝对误差限 4411(4)1022 x ε-≤?= 相对误差限 4() 0.5 (4)0.0083%6000 4 r x x x εε= = = 对x5:有a5=6, m5=5 所以有绝对误差限 514 11(5)101022 x ε-≤ ?=? 相对误差限 45() 0.510(5)8.3%600005 r x x x εε?= == 《数值分析》计算实习报告 第二题 院系:机械工程及自动化学院 学号: 姓名: 2017年11月 一、题目要求 试求矩阵A =[a ij ]10×10的全部特征值,并对其中的每一个实特征值求相应的特征向量,已知 a ij ={ sin (0.5i +0.2j ) i ≠j 1.52cos (i +1.2j ) i =j (i,j =1,2, (10) 说明: 1.用带双步位移的QR 方法求矩阵特征值,要求迭代的精度水平为ε=10?12。 2.打印以下内容: (1)全部源程序; (2)矩阵A 经过拟上三角化后所得的矩阵A (n?1); (3)对矩阵A (n?1)实行QR 方法迭代结束后所得的矩阵; (4)矩阵A 的全部特征值λi =(R i ,I i ) (i =1,2,?,10),其中R i =Re(λi ),I i = Im(λi ) 。若λi 是实数,则令I i =0; (5)A 的相应于实特征值的特征向量。 3.采用e 型数输出实型数,并且至少显示12位有效数字。 二、算法设计思路和方案 1. 将矩阵A 拟上三角化得到矩阵A (n?1) 为了减少计算量,一般先利用Householder 矩阵对矩阵A 作相似变换,把A 化为拟上三角矩阵A (n?1),然后用QR 方法计算A (n?1)的全部特征值,而A (n?1)的特征值就是A 的特征值。具体算法如下: 记(1)A A =,()r A 的第r 列至第n 列的元素为(r)(1,2, ,;,1,,)ij a i n j r r n ==+。 对于1,2,,2r n =-执行 (1)若() (2,3,,)r ir a i r r n =++全为零,则令(1)()r r A A +=,转(5);否则转(2)。 航天电连接器的可靠性分析 021014班 摘要:航天电连接器的可靠性在航天事业中具有重要作用,它对航天器是否能够稳定的工作起到决定性的作用。本文主要介绍影响航天电连接器的主要因素,并且详细地分析每种因素影响航天电连接器的原因以及一些注意事项。然后介绍了一些保证航天电连接器可靠性的措施。最后采用国际标准介绍了对航天电连接器的可靠性预计,从而对可靠性技术在航天电连接器领域的应用和发展有个全面的、客观的认识。 关键词:航天电连接器;主要影响因素;可靠性措施;可靠性预计。 引言:电连接器及其组件是航天系统工程重要的配套接口元件,散布在各个系统和部位,负责着信号和能量的传输。其连接好坏,直接关系到整个系统的安全可靠运行。由电连接器互连组成各种电路,从高频到低频、从圆形到矩形、从通过上百安培的大电流连接器到通过微弱信号的高密度连接器、从普通印制板连接器到快速分离脱落等特种连接器,几乎所有类型品种的电连接器在航天系统工程中都得到了大量应用。 例如某型号地面设备就使用了各种电连接器400套。任何一个电连接器接点失灵,都将导致航天器的发射和飞行失败。战术导弹弹体内的导引头、战斗机、发动机、自动驾驶仪等关键部件,都是通过由电连接器为基础器件,使成百上千个接点的电缆网组成一个完整的武器互连系统,一个接点出现故障,即会导致整个武器系统的失效。 正文:一、航天电连接器的可靠性分析 电连接器的可靠性包括固有可靠性和使用可靠性两方面。如图1列出影响电连接的主要因素 1.固有可靠性 电连接器的固有可靠性一般是指电连接器制造完成时所具有的可靠性,它取决于电连接器的设计、工艺、制造、管理和原材料性能等诸多因素。电连接器制作完成后,其失效模式和失效机理已固定,因此只有在可靠性设计的基础上,保证生产线上严格采取可靠性技术措施(如生产工艺的严格控制、生产环境条件的控制、各工序过程中的质量检测等),才能保证电连接器的固有可靠性。 (1)设计可靠性 ①合理选材 选材是保证电连接器电性能和可靠性的重要前提,电连接器所用材料决定了工作温度上限,而起决定作用的是绝缘材料、环境密封电连接器所用的密封材料、胶粘材料、壳体和接触件所用材料等。材料选用涉及连接器的力学、电气、环境等性能要求和材料本身的理化性能等。其中材料热学性能(耐热温度、热导率、高温强度及热变形等)是设计必须考虑的主要因素。电连接器绝缘体选用不同的绝缘材料,其绝缘耐压等电气性能也有明显差异。电连接器壳体和接触件选用时,除考虑导电、导热和结构刚度外,还应考虑相互配合和接触材料的电化学相容性和硬度匹配性。 ②结构型式 结构型式是决定产品可靠性的重要因素,合理的结构型式既避免了误插,又提高了结构的稳定性。 (2)工艺可靠性 壳体的加工工艺、绝缘体的注塑和胶接工艺、接触件的成型和镀金工艺、电连接器总装工艺和与线缆的端接工艺等,对产品固有可靠性至关重要。 镀金接触件用手工滚镀,往往导致个别插孔内壁局部没有膜层,呈氧化色,而引进超声波镀金生产线,并用仪器严格监控镀金层厚度,使内壁形成均匀膜层,提高了接触可靠性。 (3)检验可靠性 电连接器在各关键工序加强检验,通过严格的工艺筛选,剔除失效产品。交收试验时,除检查常规电性能指标外,还应百分之百进行外观质量检查,特别是多余物检查十分重要,除目视和借助放大镜外,必要时可用体视显微镜判定缺陷性质。在交收试验和二次补充筛选过程中,必须按标准规定的质量水平严格控制。当超过不合格率时,应对每批产品进行失效航天,查清失效原因,并采取有效的改进措施。 2.使用可靠性 电连接器在使用过程中会遇到电、热、机械和化学等应力的作用,如忽视了 数值分析第二次大作业 史立峰 SY1505327 一、 方案 (1)利用循环结构将sin(0.50.2)() 1.5cos( 1.2)() {i j i j ij i j i j a +≠+==(i,j=1,2,……,10)进行赋值,得到需要变换的 矩阵A ; (2)然后,对矩阵A 利用Householder 矩阵进行相似变换,把A 化为上三角矩阵A (n-1)。 对A 拟上三角化,得到拟上三角矩阵A (n-1),具体算法如下: 记A(1)=A ,并记A(r)的第r 列至第n 列的元素为()n r r j n i a r ij ,,1,;,,2,1) ( +==。 对于2,,2,1-=n r 执行 1. 若 ()n r r i a r ir ,,3,2) ( ++=全为零,则令A(r+1) =A(r),转5;否则转2。 2. 计算 () ∑+== n r i r ir r a d 1 2 )( ()( )r r r r r r r r r r d c a d a c ==-=++则取,0sgn ) (,1)(,1若 )(,12r r r r r r a c c h +-= 3. 令 () n T r nr r r r r r r r r R a a c a u ∈-=++) ()(,2)(,1,,,,0,,0 。 4. 计算 r r T r r h u A p /)(= r r r r h u A q /)(= r r T r r h u p t /= r r r r u t q -=ω T r r T r r r r p u u A A --=+ω)()1( 5. 继续。 (3)使用带双步位移的QR 方法计算矩阵A (n-1)的全部特征值,也是A 的全部特征值,具体算法如下: 1. 给定精度水平0>ε和迭代最大次数L 。 2. 记n n ij n a A A ?-==][) 1()1()1(,令n m k ==,1。 空间站的安全监测与自主维护装置构思 机自24 王东岳 2120101087 一、背景与意义 在过去的几十年中,世界各国在发展航天技术的过程中,由于错综复杂的原因,发生了数以千计的事故,数以万计的故障。特别在研制初期这种情况尤为明显,可以说世界各国的航天器是在不断出现事故和故障中发展起来的。当前,发展载人航天技术已成为世界航天的发展热点,空间站更是其中的一位佼佼者。它是一项投资巨大、技术复杂的综合性大型航天工程,因此加强空间站的安全保障,尤其是设计初期的安全计划则成了一项必不可少的关键工作,其中故障监测报警、诊断和恢复技术成为航天事业中保障航天器安全,提高可靠性,降低风险的有效对策。 空间站是机械、电子、材料、控制、推进、能源、通讯以及航天医学和生物学、计算机技术、遥感技术、天体物理等多学科最新的尖端成果的协同运用,造价极其昂贵的大型复杂系统,而且要在数以年计的任务时间内可靠运行。因此,空间站的设计必须要求具备故障检测和诊断能力,这是提高空间站可靠性的极为重要的补充,也是空间站设计中的一个不容忽视的至关重要的环节。 二、国内外展综述 故障检测、报警与诊断技术随着80年代初期以来人工智能和专家系统技术在各个民用行业的兴起和成功应用,在载人航天事业中占有越来越关键的地位。故障诊断系统已与空间站的各分系统,各软、硬件配置集为一体。以空间站站上火灾的预防和控制方法的具体应用也可看出故障检测、报警与诊断技术的渗透:故障检测系统实时监测站上环境中的温度、放射线、烟雾因子以及空气化学成分等的变化,或产生报警,或由诊断系统诊断后提出对策,由站上的多专家系统(站上二氧化碳,氮,Halan1301为灭火专家) 进行故障隔离。 故障检测诊断技术一直是载人航天器发展的一大特色,经历了60年代简单的状态监测(水星号),70年代初的基于算法的故障监测(阿波罗计划)和80年代基于知识的智能诊断(航天飞机),智能诊断进一步发展到目前的基于模型的自主诊断(空间站)。基于模型的故障诊断方法已成为目前故障诊断方法的研究热点,它结合系统的物理特性和有限的经验知识有效地进行诊断。基于模型的诊断专家系统尤其适合于经验知识少,领域专家与能力较弱的空间站站上故障诊断、隔离和恢复,对紧急的、危及航天员安全和空间站安全的故障进行自主诊断和局部处理。 国内对航天器在轨故障检测和诊断技术研究较晚,主要由航空航天研究院校所承担。北京控制工程研究所研制出了卫星控制系统实施故障诊断专家系统原型(SCRDES)。 在“东方红3号”、“资源1号”、“资源2号”和神舟飞船等型号中采用了系统诊断和重构等智能化技术。哈尔滨工业大学分别与中国空间技术研究院等单位合作对载人障诊断进行了深入的研究,取得了一定的经验,并且已经分别开发出故障诊断原型系统 [15]。但是,国内所开发的大部分故障诊断系统基本上还属于实验型,距离实用化阶段 还有许多工作要做,而且主要以地面诊断为主。 三、方案设计 (1)已有方案及对比分析 电力系统分析课程报告姓名 ******* 学院自动化与电气工程学院 专业控制科学与工程 班级 ******* 指导老师 ******* 二〇一六年五月十三 一、同步发电机三相短路仿真 1、仿真模型的建立 选取三相同步发电机模型,以三相视图表示。励磁电压和原动机输入转矩Ef 与Tm均为定常值,且发电机空载。当运行至时,发电机发生三相短路故障。同步发电机三相短路实验仿真模型如图1所示。 图1 同步发电机三相短路实验仿真模型 2、发电机参数对仿真结果的影响及分析 衰减时间常数Ta对于直流分量的影响 三相短路电流的直流分量大小不等,但衰减规律相同,均按指数规律衰减,衰减时间常数为Ta,由定子回路的电阻和等值电感决定(大约)。pscad同步发电机模型衰减时间常数Ta对应位置如图3所示(当前Ta=)。 图3 同步发电机模型参数Ta对应位置 1)Ta=时,直流分量的衰减过程(以励磁电流作为分析)如图4所示。 图4 Ta=发生短路If波形 2)Ta=时,直流分量的衰减过程(以励磁电流作为分析)如图5所示。 图5 Ta=发生短路If波形 短路时刻的不同对短路电流的影响 由于短路电流的直流分量起始值越大,短路电流瞬时值就越大,而直流分量的起始值于短路时刻的电流相位有关,即直流分量是由于短路后电流不能突变而产生的。 Pscad模型中对短路时刻的设置如图6所示 图6 Pscad对于短路时刻的设置 1)当在t=时发生三相短路,三相短路电流波形如图7所示。 图7 t=时三相短路电流波形 2)当在t=时发生三相短路,三相短路电流波形如图8所示。 图8 t=6时三相短路电流波形 Xd、Xd`、Xd``对短路电流的影响 1) Xd的影响 Pscad中对于Xd的设置如图9所示: 图9 Pscad对于D轴同步电抗Xd的设置 下面验证不同Xd时A相短路电流的稳定值。 i.Xd=(标幺制,下同)时,仿真波形如图10所示 图10 Xd=时A相短路电流波形 ii.Xd=10时,仿真波形如图11所示 图11 Xd=时A相短路电流波形 2)Xd`的影响 在Pscad中暂态电抗Xd`的设置如图13所示: 图13 Pscad对于暂态电抗Xd的设置 下面验证不同Xd`时A相短路电流的暂态过程。 i.Xd`=时A相短路电流的波形如图14所示: 图14 Xd`=时A相短路电流波形 ii.Xd`=1时A相短路电流的波形如图15所示: 图15 Xd``=1时A相短路电流波形 3)Xd``的影响 这里次暂态电抗Xd``与暂态电抗Xd`相似,Xd``影响的是短路后的次暂态过程。 题目:设计求取n n ?实数矩阵A 的所有特征值及其特征向量的数值算法,并以矩阵 20010-1-24A=0-2131 43 1?? ? ? ? ??? 为例进行具体的求解计算。 一、 算法分析: 一般而言,求取实数矩阵所有特征值的方法有雅克比法和QR 分解法,两者都是变换法。其中雅克比法只能求解对称矩阵的全部特征值和特征向量,而QR 则可用于更一般的矩阵特征值的求解,结合反幂法可进而求出各个特征向量。 二、 算法设计: 1、 原始实矩阵A R n n ?∈拟上三角化 为了减少求特征值和特征向量过程中的计算量,对生成的矩阵A 进行拟上三角化,得到拟上三角化矩阵A ’ 记A (1)=A ,并记A (r)的第r 列到第n 列的元素(1,2,...,;,1,...,)r ij a i n j r r n ==+。 对于r=1,2,…,n -2执行 (1) 若() (2,3,...,)r ir a i r r n =++全为零,则令A (r+1)= A (r),转(5);否则转(2)。 (2) 计算 令 ()2 ()() 1,1,1,sgn(0,sgn()=1) r r r r r r r r r r r c a a a ρ+++=-=,(若则取 (3) 令-0=r n r u u ?? ? ?? ,()()()-1,2,1(,,...,)r r r T n r r r r r r nr u a c a a ρ++=- (4) 计算 (r)(r)(r)T n-r r+1,r r r+2,r nr r T n-r T n-r n-r n-r n-r r+1r 1u = (a -c ,a ,...,a )ρ I H =I -2uu =H H =I -2u u A =HA H ?? ? ?? (5) 继续 算法执行完后,就得到与原矩阵A 相似的拟上三角矩阵A (n-1)。 2、 拟上三角矩阵QR 分解的求原矩阵的全部特征值 记A k 是对拟上三角矩阵进行QR 算法,产生的矩阵序列,A 0是起始拟上三角矩阵, 大数据处理技术研究 姓名:;学号:1502;专业:模式识别与智能系统 摘要:本文详细介绍了大数据的相关概念及其对应的处理方法,列举了大数据处理技术在当代计算机处理中的应用,并简要的解释了Hadoop的相关概念,展望了大数据处理技术的发展方向。 关键词:大数据 Hadoop高性能计算 1.研究背景: 大数据浪潮汹涌来袭,与互联网的发明一样,这绝不仅仅是信息技术领域的革命,更是在全球范围启动透明政府、加速企业创新、引领社会变革的利器。 大数据,IT行业的又一次技术变革,大数据的浪潮汹涌而至,对国家治理、企业决策和个人生活都在产生深远的影响,并将成为云计算、物联网之后信息技术产业领域又一重大创新变革。未来的十年将是一个“大数据”引领的智慧科技的时代、随着社交网络的逐渐成熟,移动带宽迅速提升、云计算、物联网应用更加丰富、更多的传感设备、移动终端接入到网络,由此而产生的数据及增长速度将比历史上的任何时期都要多、都要快。 2.大数据定义: “大数据”是一个涵盖多种技术的概念,简单地说,是指无法在一定时间内用常规软件工具对其内容进行抓取、管理和处理的数据集合。IBM将“大数据”理念定义为4个V,即大量化(Volume)、多样化(Variety)、快速化(Velocity)及由此产生的价值(Value)。如下图; 3.大数据技术的发展: 大数据技术描述了一种新一代技术和构架,用于以很经济的方式、以高速的捕获、发现和分析技术,从各种超大规模的数据中提取价值,而且未来急剧增长的数据迫切需要寻求新的处理技术手段。 在“大数据”(Big data)时代,通过互联网、社交网络、物联网,人们能够及时全面地获得大信息。同时,信息自身存在形式的变化与演进,也使得作为信息载体的数据以远超人们想象的速度迅速膨胀。 云时代的到来使得数据创造的主体由企业逐渐转向个体,而个体所产生的绝大部分数据为图片、文档、视频等非结构化数据。信息化技术的普及使得企业更多的办公流程通过网络得以实现,由此产生的数据也以非结构化数据为主。预计到2012年,非结构化数据将达到互联网整个数据量的75%以上。用于提取智慧的“大数据”,往往是这些非结构化数据。传统的数据仓库系统、BI、链路挖掘等应用对数据处理的时间要求往往以小时或天为单位。但“大数据”应用突出强调数据处理的实时性。在线个性化推荐、股票交易处理、实时路况信息等数据处理时间要求在分钟甚至秒级。 而“大数据”的多样性决定了数据采集来源的复杂性,从智能传感器到社交网络数据,从声音图片到在线交易数据,可能性是无穷无尽的。选择正确的数据来源并进行交叉分析可以为企业创造最显著的利益。随着数据源的爆发式增长, 电力系统分析潮流计算大作业(源程序及实验报告) 源程序如下: 采用直角坐标系的牛顿-拉夫逊迭代 function chaoliujisuan() m=3; %m=PQ节点个数 v=1;%v=PV节点个数 P=[-0.8055 -0.18 0]; %P=PQ节点的P值 Q=[-0.5320 -0.12 0]; %Q=PQ节点的Q值 PP=[0.5];%PP=PV节点的P值 V=[1.0];%V=PV节点的U值 E=[1 1 1 1.0 1.0]'; %E=PQ,PV,Vθ节点e的初值 F=[0 0 0 0 0]'; %F=PQ,PV,Vθ节点f的初值 G=[ 6.3110 -3.5587 -2.7523 0 0; -3.5587 8.5587 -5 0 0; -2.7523 -5 7.7523 0 0; 0 0 0 0 0; 0 0 0 0 0 ]; B=[ -20.4022 11.3879 9.1743 0 0; 11.3879 -31.00937 15 4.9889 0; 9.1743 15 -28.7757 0 4.9889; 0 4.9889 0 5.2493 0; 0 0 4.9889 0 -5.2493 ]; Y=G+j*B; X=[]; %X=△X n=m+v+1;%总的节点数 FX=ones(2*n-2,1);%F(x)矩阵 F1=zeros(n-1,n-1);%F(x)导数矩阵 a=0;%记录迭代次数 EF=zeros(n-1,n-1);%最后的节点电压矩阵 while max(FX)>=10^(-5) for i=1:m %PQ节点 FX(i)=P(i);%△P FX(n+i-1)=Q(i);%△Q for w=1:n FX(i)= FX(i)-E(i)*G(i,w)*E(w)+E(i)*B(i,w)*F(w)-F(i)*G(i,w)*F(w)-F(i)*B(i,w)*E(w); %△P FX(n+i-1)=FX(n+i-1)-F(i)*G(i,w)*E(w)+F(i)*B(i,w)*F(w)+E(i)*G(i,w)*F(w)+E(i)*B(i ,w)*E(w); %△Q end 大作业 三 1. 给定初值0x 及容许误差 ,编制牛顿法解方程f (x )=0的通用 程序. 解:Matlab 程序如下: 函数m 文件:fu.m function Fu=fu(x) Fu=x^3/3-x; end 函数m 文件:dfu.m function Fu=dfu(x) Fu=x^2-1; end 用Newton 法求根的通用程序Newton.m clear; x0=input('请输入初值x0:'); ep=input('请输入容许误差:'); flag=1; while flag==1 x1=x0-fu(x0)/dfu(x0); if abs(x1-x0) while flag1==1 && m<=10^3 x1=x0-fu(x0)/dfu(x0); if abs(x1-x0)西工大可靠性设计大作业
数值分析大作业三 四 五 六 七
数值分析作业答案
吉大20年9月课程考试《电力系统分析》离线大作业考核100分
数值分析大作业
技术经济学吉大2016-2017大作业
北航数值分析大作业第二题精解
可靠性大作业
上海大学_王培康_数值分析大作业
数值分析第二次大作业
西电 航天电连接器的可靠性分析大作业
北航数值分析大作业第二题
故障诊断综合大作业
PSCAD的电力系统仿真大作业
数值分析大作业QR分解
高性能计算实验大作业
电力系统分析潮流计算大作业
数值分析大作业 三、四、五、六、七