风电机组偏航系统规程

风电机组偏航系统规程
1 简介
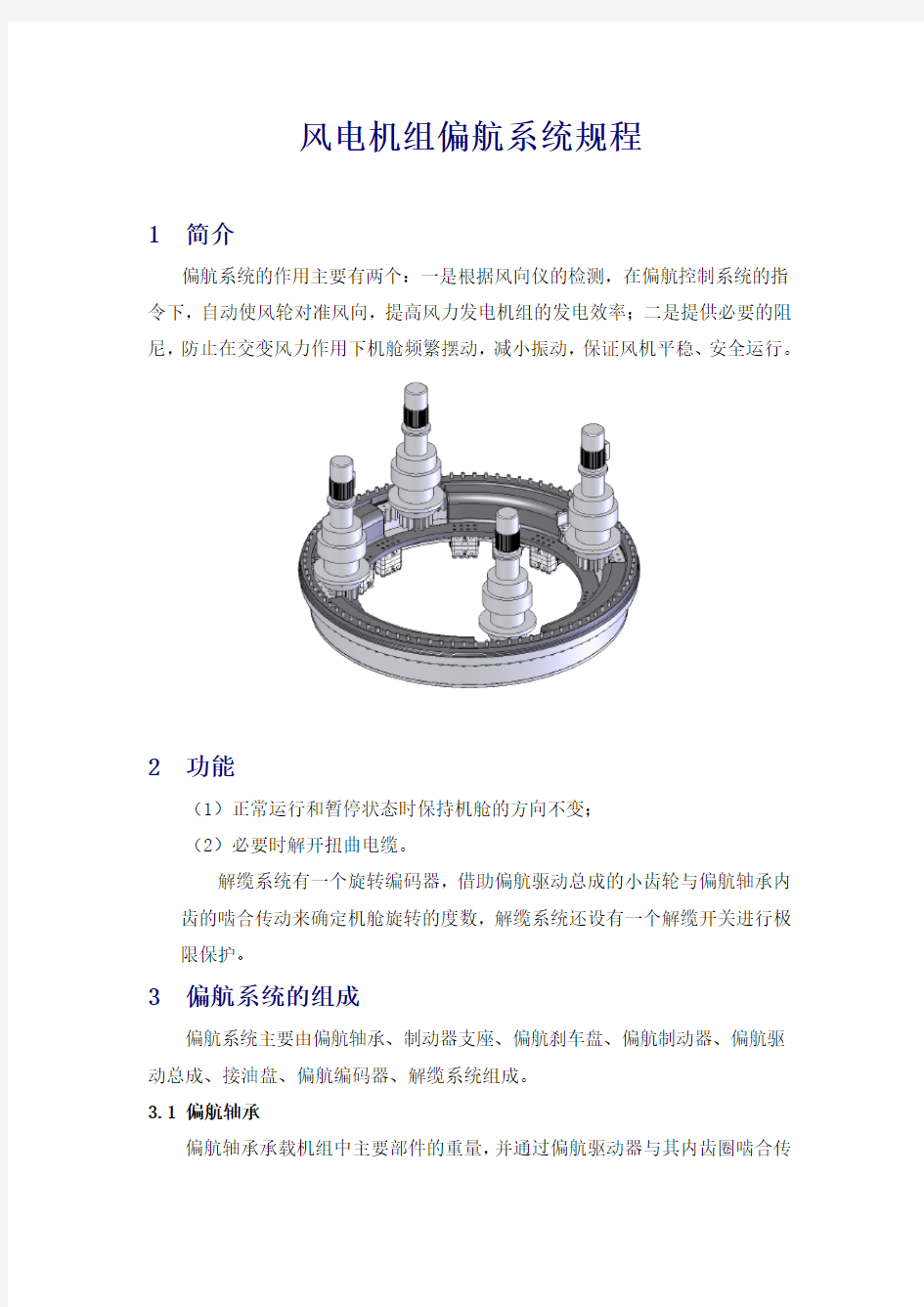
偏航系统的作用主要有两个:一是根据风向仪的检测,在偏航控制系统的指令下,自动使风轮对准风向,提高风力发电机组的发电效率;二是提供必要的阻尼,防止在交变风力作用下机舱频繁摆动,减小振动,保证风机平稳、安全运行。
2 功能
(1)正常运行和暂停状态时保持机舱的方向不变;
(2)必要时解开扭曲电缆。
解缆系统有一个旋转编码器,借助偏航驱动总成的小齿轮与偏航轴承内齿的啮合传动来确定机舱旋转的度数,解缆系统还设有一个解缆开关进行极限保护。
3 偏航系统的组成
偏航系统主要由偏航轴承、制动器支座、偏航刹车盘、偏航制动器、偏航驱动总成、接油盘、偏航编码器、解缆系统组成。
3.1 偏航轴承
偏航轴承承载机组中主要部件的重量,并通过偏航驱动器与其内齿圈啮合传
递推力到塔架,机舱旋转一定角度,使风轮精确迎对风向。
3.2 偏航驱动器
每台风力发电机组共有4个偏航驱动总成,偏航驱动总成由驱动电机、偏航减速箱、偏航小齿轮组成。偏航驱动总成在通过与偏航轴承内齿圈啮合带动整个机舱旋转时,要求起动平稳,转速均匀,无振动现象。
偏航驱动电机参数如下:
类型:带制动器的三相电机,B5
额定功率: 2.85KW
电压: 380V
频率: 50Hz
额定转速: 1460rpm
防护等级: IP54
绝缘等级: ISO F
制动器:失电弹簧制动,电磁松闸并带手动操作手柄式旋钮制动力矩: 46N.m
偏航减速箱参数如下:
额定功率: 2.85KW
额定输入转速: 1460rpm
额定扭矩: 19Nm
名义传动比: 1113
使用场合系数: 1.3
使用场合系数(静强度): 1.0
接触强度安全系数:≥0.6
接触强度安全系数(静强度):≥1.0
行星齿轮弯曲强度安全系数:≥1.0
行星齿轮弯曲强度安全系数:≥1.0
弯曲强度安全系数(静强度):≥1.2
所选轴承供应商:进口轴承
使用寿命: 20年
运行环境温度: -40℃~+40℃
生存环境温度: -40℃~+50℃
噪声(声功率级):≤85dB(A)
偏航小齿轮技术参数
模数: 18
齿数: 14
压力角: 20°
变位系数: +0.5
表面粗糙度: Ra0.8
齿面宽度: 130mm
齿面硬度: 675HV
齿轮精度: 8e26(DIN3963/DIN3967)
齿形:鼓形齿
偏航减速机的润滑
润滑方式:浸油润滑+油脂润滑
齿轮润滑油: Shell Oamal HD320
Mobil Mobilgear SHC XMP320
Optigear Synthetic A320
轴承润滑脂: 460#号锂基润滑脂
3.3 偏航制动器
每台风机配备12个偏航制动器,分为4组匀布于偏航刹车盘上。当风机运行不需要偏航时,偏航制动器全压(140bar-160bar)刹住,保持机舱方向不变;当风机运行需要偏航时,为避免因风向频繁变化而引起偏航齿轮产生交变载荷,应采用偏航制动器产生阻尼(约45bar)来吸收微小的自由偏转振荡,防止偏航时的频繁交变应力导致轮齿过早损坏;当风机需要解缆时,偏航制动器全部泄压(0bar),机舱回到零位,再自动迎对风向。
3.4 偏航系统零部件清单和使用工具
13.4检查与维护
注意:首次维护检查应在风机动态调试完毕7—10天后进行;以后每6个月进行一
次。(有特别说明的除外!)
维护和检修工作,必须由明阳风电公司或接受过明阳风电公司培训并得到认可的人员完成。
在进行维护和检修工作时,必须携带《检修卡[偏航]》。《检修卡[偏航]》上的每项内容必须严格进行检修与记录。
在进行维护和检修前,必须认真阅读《MY1.5s/se安全手册》。所有操作必须严格遵守《MY1.5s/se安全手册》的规定。
如果超过下述的任何一个限定值,必须立即停止工作。不得进行维护和检修工作:
1、对于常温机型,环境温度低于-20 ℃;
2、叶片位于工作位置和顺桨位置之间的任何位置
5分钟平均值(平均风速) 10 m/s
5秒平均值 (阵风速度) 19 m/s
3、叶片位于顺桨位置(当叶轮锁定装置启动时不允许变桨)
5-分钟平均值(平均风速) 18 m/s
5-秒平均值 (阵风速度) 27 m/s
重要提示:
对偏航部分进行任何维护和检修,必须首先使风力发电机停止工作,各制动器处于制动状态并将叶轮锁锁定。
如特殊情况需在风力发电机处于运动状态下进行维护和检修时(如检查偏航齿圈啮合、异常噪音、能否精确迎风等状态时),必须确保有人守在紧急开关旁,可随时按下开关,使系统刹车。
当处理偏航齿轮箱润滑油时,必须配戴安全器具。
4.1 表面检查与维护
偏航系统动作时检查是否有异常噪声,是否能精确对准风向;
停机检查偏航轴承外表是否有污物,如有,应及时用无纤维抹布和清洗剂清理干净;检查涂漆外表面是否油漆脱落,如有,应按《防腐技术规范》的要求修复;
观察偏航驱动减速箱是否有漏油,如有,请立即进行维修或更换密封件;
检查电缆缠绕、绝缘皮磨损情况。
4.2 偏航轴承的维护
4.2.1 润滑
偏航轴承的滚道及内齿圈齿面须保持足够的润滑,润滑油品牌见后附表。
①当用自动润滑装置时,再次注油量应为520g≈ 0.55 公升,这个量在一年之内从每个润滑注油孔供应到滚道内。
②在手工润滑的情况下,第一次的注油应在6个月时进行,以后的间隔为12个月。再次注油量应为520g≈ 0.55 公升,且根据润滑注油孔的数目进行分配。
注油时要缓慢转动偏航轴承!
③使用干净的刷子沾上规定的润滑脂进行内齿圈齿面润滑,在涂刷时注意去除多余的油脂和杂质。
④检查滚道排出的废油脂是否有金属屑等杂质以此来研判滚道及滚珠的磨损状况;检查内齿圈齿面清出的废油脂是否有金属屑等杂质借此来判定齿面点蚀等失效原因。
4.2.2 密封圈的检查
偏航轴承内、外圈之间的密封圈至
少每12 个月检查一次。密封圈必须保持清洁和完整。当清洁部件时,应避免清洁剂接触到密封圈或进入轨道系统。若发现密封圈有任何损坏,应立即与明阳风电公司联系。 4.2.3 滚道磨损检查
在运行很长一段时间后,轨道系统会出现磨损现象。要求每12个月检查一次,可以根据下面“轴向变动量测量单”对磨损进行测量并提供文件证明:
为了便于检查,在安装之后要找出4个合适的测量点并在偏航轴承和连接支座上标注出来,在这4个点上进行测量并记录数据,此数据作为基准测量数据。 在与基准测量条件相同的情况下重复进行测量。
如果测量到的值和基准值有偏差,代表有磨损发生。偏航轴承可承受的最大磨损值为2.4mm 。如果超出最大值,请咨询明阳风电公司。 轴向变动量测量单:
测量轴向变动量(偏航轴承间隙允许增加2.4mm )
测量 基准测量
检验测量
检验测量 检验测量
测量点1
测量点2 测量点3 测量点4 检验员 签名 日期
刹车盘
内圈
外圈
4.3 偏航驱动器的维护
①检查偏航驱动器总成运行时是否有异常振动、噪音、过热,如有则断开电源,再作检查。
②检查偏航电机接线是否松动,清除导线和端子上氧化物,重新接线牢固。
③检查偏航减速箱接缝处是否渗油,如有则需更换密件。
④定期对偏航减速箱进行正确的维护,下面所提到的检查和操作必须做到:
检查频率动作
安装螺栓偏航减速箱第一次启动后的50小时检查螺栓扭矩(见下表)
第1次换油偏航减速箱累计运转150小时后换油
下一次换油每3年换油
偏航减速箱加油和换油步骤如下:
加油——将油嘴附近清理干净;
——松开注油堵头和油位堵
头;
——按照附录要求添加指定牌
号润滑油到油位标示处;
——安装注油堵头和油位堵头后,启动减速箱运转几分钟,如油位下降再添加润滑油(加油量约16L)。
——加油完成后立即清理泄露的油(工具:清洁剂、抹布、油壶)。
换油——放油前保持一定油温以利于油顺畅排出;
——松开放油堵头,让油流入一个大容器内;
——放油完毕安装放油堵头;
——按加油步骤重新给减速机
注油;
——加油完毕立即清理干净加
油口和放油口(工具:清洁剂、抹
布、油壶、大油盆)。
4.4 偏航制动器的维护
——检查制动器表面防腐涂层是否脱落,如有,及时按《防腐技术规范》修复;
——观察偏航制动器各连接管路是否漏油,如有,应立即进行维修
——螺栓检测
1. 检查制动器本体上的螺栓是否松动(用手动扳手手动检测) 。
2. 检测偏航制动器与偏航制动器支座的连接螺栓(用力矩扳手检
测)用液压扳手按规定的力矩1178Nm,检查将制动器安装到偏航制动器支座上的8个螺栓(M27×265,10.9级)。
a)如果螺栓不能被旋转或旋转的角度小于20度,说明预紧力仍在限度以内。
b)如果螺栓能被旋转,且旋转角超过20度,那么,就必须用液压扳手以规定的力矩1178Nm重新把紧。每检查完一个,用笔在螺栓头处做一个圆圈记号,共8×12=96个。
——摩擦片检查与更换:摩擦片用钢板和摩擦材料制造,每个摩擦片的平均总厚度为18mm,任何摩擦片的厚度低于12mm时,表明已经磨损掉6mm,应立即更换摩擦片。摩擦片的尺寸根据制动器类型不同可能会不同,要根据制动器的型号(antec制动器,sime制动器)更换摩擦片。如果是配有磨损指示衬垫的摩擦片,根据指示器的状态更换摩擦片。根据制动器类型的不同有不同的制动器更换程序:
①必须将制动器的半卡钳从装配体上卸下,然后直接拆下摩擦片。
②有端头止挡的制动器的更换程序如下:
※松开摩擦片回缩螺钉;注意不要丢失回缩弹簧(只针对于有摩擦片回缩系统);
※卸下一个半卡钳的端头止挡(见下图);
※拆下旧的摩擦片,并更换新的;
※如果同时卸下半卡钳的两个端头止挡,可以从半卡钳的中间抽出摩擦片;
※装上新摩擦片后,上紧摩擦片安装螺钉直到螺钉末端接触到
回缩螺钉的衬套;
※两个半卡钳的端头止挡再安装到位,并按要求上紧螺钉;
——偏航制动器拆卸及更换(注意:新制动器应在工作室清洁外部和内油道)
1. 泄掉偏航系统的液压力;
2. 拆除偏航制动器上的管路接头,注意收集制动器油口的油脂,不要泄漏到机舱里;
3. 用力矩扳手依次拆下8 个M27×265 的螺栓。注意:每个螺栓旋转三圈,顺次拆卸,中间不得跳跃拆卸,直到所有螺栓完全松开后再将其一次性拆掉;4、移开换下的制动器,以便于新的制动器安装。
(以上是拆卸步骤,以下为安装新制动器步骤)
5、偏航制动器安装:
序
图片说明文字说明
号
①用6的内六角将油口堵头柠
下
②拧上清洗用接头。
③接好清洗油泵对制动器进行
清洗。
④清洗油压力在0.4MPa左右。
⑤将B夹(带O型圈凹槽)先对
好安装孔放好,将O型圈放入
安装槽内。
⑥盖上A夹,注意保证O型圈不
窜位。
⑦将M27X265螺栓带27平垫插
入,螺栓螺纹处抹上二硫化钼
润滑脂
⑧一个人对齐上下夹,另一个人
用6公斤力气动扳手将螺栓
打紧,要求先打内圈后打外圈
螺栓。
⑨用1500NM力矩扳手分两次打
紧螺栓,第一次800NM,第二
次1178NM。
⑩螺栓头部刷锌漆防腐。
6、完成上述步骤后,安装液压管道,试验偏航制动器运行;
7、用机舱吊机吊下被拆除的偏航制动器及其他工具,清洁机舱。
4.5 紧固件检查
用液压力矩扳手按规定的力矩检查偏航系统所有的安装螺栓(见下表):
①如果螺栓不能被旋转或旋转的角度小于20°,说明预紧力仍在限度以内。
②如果螺栓能被旋转,且旋转角超过20°,那么就用液压扳手按规定的力矩重新拧紧。
③每检查完一个,用笔在螺栓头处做一个圆圈记号。完毕作防腐。
力矩值
名称等级代号安装位置
备注
(N.m)
风力发电机组传动系统设计实习报告
目录 引言 (2) 一、风力发电机组简介 (2) 风力发电机原理 (2) 风力发电机组结构 (3) 二、风力发电机组传动系统 (5) 风力发电机组齿轮箱的概况 (5) 风力发电机组中的联轴器 (10) 三、风力发电机组的分类特点 (11) 垂直轴风力发电机组 (11) 水平轴风力发电机组 (12) 直驱型风力发电机 (12) 双馈式风力发电机 (12) 四、风力发电控制系统简述 (13) 风电控制系统基本功能 (13) 五、参考文献 (13)
风力发电机组传动系统设计 引言 随着科技的不断进步,社会的不断发展,能源问题将会成为未来人类必须解决的问题之一,同时可再生能源结构会成为未来能源的倾向之一。现如今风能作为一种无污染的可再生能源备受人们的关注,在一定程度上,风力发电将会成为未来最具潜力的新能源之一。风力发电正在世界上形成一股热潮,因为风力发电没有燃料问题,也不会产生辐射或空气污染。风力发电在芬兰、丹麦等国家很流行;我国也在大力提倡。 一、风力发电机组简介 风力发电机原理 风力发电机是将风能转换为机械功的动力机械。风力发电的原理,是利用风力带动风车叶片旋转,再透过增速机将旋转的速度提升,来促使发电机发电。依据目前的风车技术,大约是每秒三公尺的微风速度(微风的程度),便可以开始发电。 风力发电机由机头、转体、尾翼、叶片组成。每一部分都很重要,各部分功能为:叶片用来接受风力并通过机头转为电能;尾翼使叶片始终对着来风的方向从而获得最大的风能;转体能使机头灵活地转动以实现尾翼调整方向的功能;机头的转子是永磁体,定子绕组切割磁力线产生电能。风力发电机因风量不稳定,故其输出的是13~25V变化的交流电,须经充电器整流,再对蓄电瓶充电,使风力发电机产生的电能变成化学能。然后用有保护
风机偏航毕业设计
酒泉职业技术学院 毕业设计 题目:风力发电机组偏航系统的控制学院:酒泉职业技术学院 班级: 10级风电(1)班 姓名:李世辉 指导教师:赵玉丽 完成日期: 2012 年 12 月 20 日
摘要 随着社会经济的发展,人们对电的需求日益提高。以石油、煤炭、天然气为的常规能源,不仅资源有限,而且还会在使用中造成严重的环境污染。在我们进入21世纪的今天,世界能源结构正在孕育着重大的转变,即由矿物能源系统向以可再生能源为基础的可持续能源系统转变。风能作为取之不尽,用之不竭的绿色清洁能源己受到全世界的重视,而风力机的偏航系统能使风能得到更好的利用,所以偏航系统的设计非常的重要。 本设计首先分析了偏航系统的工作原理,然后以三菱PLC作为控制器,触摸屏为监控器,设计了硬件系统模块,整个硬件系统采用了闭环控制,并说明了开环控制的缺点。根据偏航控制要求,设计了自动对风控制算法,自动解缆控制算法,90°背风控制算法,不仅提高了风能利用率,增大了发电效率,而且还保证了整个系统的安全性、稳定性,让风力发电机更好的运行。 关键词:偏航系统硬件设计自动对风自动解缆
目录 摘要 (1) 第一章概述.......................................................错误!未定义书签。 1.1 设计背景 (2) 1.2 设计研究意义 (2) 1.3 国内外风力发电概况 (2) 1.3.1 世界风电发展 (2) 1.3.2 我国风电发展 (3) 第二章偏航控制系统功能简介和原理 (3) 2.1 偏航控制系统的功能............................................错误!未定义书签。 2.2 风力发电机组偏航控制原理......................................错误!未定义书签。 第三章偏航系统的控制过程.........................................错误!未定义书签。 3.1 自动偏航控制..................................................错误!未定义书签。 3.1.1 自动偏航传感器ASS状态...................................错误!未定义书签。 3.1.2 参数说明和电机运行状态...................................错误!未定义书签。 3.1.3 偏航控制流程图..........................................错误!未定义书签。 3.1.4 偏航电机电气连接原理图..................................错误!未定义书签。 3.1.5 偏航对风控制PLC程序....................................错误!未定义书签。 3.2 90°侧风控制................................................错误!未定义书签。 3.3 人工偏航控制.................................................错误!未定义书签。 3.4 自动解缆控制.................................................错误!未定义书签。 第四章总结 (5) 参考文献 (12) 致谢 (13)
风力发电机组偏航系统详细介绍
风力发电机组偏航系统详细介绍2012-12-15 资讯频道 偏航系统的主要作用有两偏航系统是水平轴式风力发电机组必不可少的组成系统之一。 使风力发电机组的风轮始终处于迎风状态,其一是与风力发电机组的控制系统相互配合,个。以保障风力发其二是提供必要的锁紧力矩,充分利用风能,提高风力发电机组的发电效率;被动风力发电机组的偏航系统一般分为主动偏航系统和被动偏航系统。电机组的安全运行。舵轮常见的有尾舵、偏航指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,和下风向三种;通常都采用主动偏航的齿轮驱动对于并网型风力发电机组来说,齿轮驱动和滑动两种形式。形式。 1.偏航系统的技术要求 1.1. 环境条件 在进行偏航系统的设计时,必须考虑的环境条件如下: 1). 温度; 2). 湿度; 3). 阳光辐射; 雨、冰雹、雪和冰;4). 5). 化学活性物质; 机械活动微粒;6). 盐雾。风电材料设备7). 近海环境需要考虑附加特殊条件。8). 应根据典型值或可变条件的限制,确定设计用的气候条件。选择设计值时,应考虑几 气候条件的变化应在与年轮周期相对应的正常限制范围内,种气候条件同时出现的可能性。不影响所设计的风力发电机组偏航系统的正常运行。 1.2. 电缆 必须使电缆有足够为保证机组悬垂部分电缆不至于产生过度的纽绞而使电缆断裂失效, 电缆悬垂量的多少是根据电缆所允许的扭转角度确定的悬垂量,在设计上要采用冗余设计。的。阻尼1.3. 偏航系统在机组为避免风力发电机组在偏航过程中产生过大的振动而造成整机的共振, 阻尼力矩的大小要根据机舱和风轮质量总和的惯性力矩来偏航时必须具有合适的阻尼力矩。只有在其基本的确定原则为确保风力发电机组在偏航时应动作平稳顺畅不产生振动。确定。阻尼力矩的作用下,机组的风轮才能够定位准确,充分利用风能进行发电。 1.4. 解缆和纽缆保护 偏航系统的偏航动解缆和纽缆保护是风力发电机组的偏航系统所必须具有的主要功能。 所以在偏航系统中应设置与方向有关的计数作会导致机舱和塔架之间的连接电缆发生纽绞,检测装置或类一般对于主动偏航系统来说,装置或类似的程序对电缆的纽绞程度进行检测。对于被动偏航系统检测装置或类似似的程序应在电缆达到规定的纽绞角度之前发解缆信号;偏航系并进行人工解缆。的程序应在电缆达到危险的纽绞角度之前禁止机舱继续同向旋转,一般与偏航圈统的解缆一般分为初级解缆和终极解缆。初级解缆是在一定的条件下进行的,这个装置的控制逻纽缆保护装置是风力发电机组偏航系统必须具有的装置,数和风速相关。辑应具有最高级别的权限,一旦这个装置被触发,则风力发电机组必须进行紧急停机。偏航转速 1.5. 1 对于并网型风力发电机组的运行状态来说,风轮轴和叶片轴在机组的正常运行时不可避免的产生陀螺力矩,这个力矩过大将对风力发电机组的寿命和安全造成影响。为减少这个力矩对风力发
风力发电机机舱内部传动系统动画,直观!
风力发电机机舱内部传动系统动画,直观! ★ 风力发电机将风能转换为机械功的动力机械,将广义地说,它是一以大气为工作介质的能量利用机械。风力发电利用的是自然能源。风力发电机由机舱、传动系统、偏航系统、液压系统、制动系统、发电机、控制与安全系统、机舱、塔架和基础等组成,下面小编来详述详述风力发电机结构图,如下:机舱:机舱包容着风力发电机的关键设备,包括齿轮箱、发电机。维护人员可以通过风力发电机塔进入机舱。机舱左端是风力发电机转子,即转子叶片及轴。 转子叶片:捉获风,并将风力传送到转子轴心。现代600千瓦风力发电机上,每个转子叶片的测量长度大约为20米, 而且被设计得很像飞机的机翼。 轴心:转子轴心附着在风力发电机的低速轴上。 低速轴:风力发电机的低速轴将转子轴心与齿轮箱连接在一起。在现代600千瓦风力发电机上,转子转速相当慢,大约为19至30转每分钟。轴中有用于液压系统的导管,来激发空气动力闸的运行。 齿轮箱:齿轮箱左边是低速轴,它可以将高速轴的转速提高至低速轴的50倍。高速轴及其机械闸:高速轴以1500转每分钟运转,并驱动发电机。它装备有紧急机械闸,用于空气动力闸失效时,或风力发电机被维修时。
发电机:通常被称为感应电机或异步发电机。在现代风力发电机上,最大电力输出通常为500至1500千瓦。偏航装置:借助电动机转动机舱,以使转子正对着风。偏航装置由电子控制器操作,电子控制器可以通过风向标来感觉风向。图中显示了风力发电机偏航。通常,在风改变其方向时,风力发电机一次只会偏转几度。 电子控制器:包含一台不断监控风力发电机状态的计算机,并控制偏航装置。为防止任何故障(即齿轮箱或发电机的过热),该控制器可以自动停止风力发电机的转动,并通过电话调制解调器来呼叫风力发电机操作员。 液压系统:用于重置风力发电机的空气动力闸。 冷却元件:包含一个风扇,用于冷却发电机。此外,它包含一个油冷却元件,用于冷却齿轮箱内的油。一些风力发电机具有水冷发电机。 塔:风力发电机塔载有机舱及转子。通常高的塔具有优势,因为离地面越高,风速越大。现代600千瓦风汽轮机的塔高为40至60米。它可以为管状的塔,也可以是格子状的塔。管状的塔对于维修人员更为安全,因为他们可以通过内部的梯子到达塔顶。格状的塔的优点在于它比较便宜。
兆瓦级风电机组偏航系统的设计
兆瓦级风电机组偏航系统的设计 自动化 K031241720 李江 摘要风能是绿色能源。我国在风力发电上的投入和研究也正进入一个快速发展的时期。偏航控制一直未能取得有效的发展。针对这方面的问题,本论文展开了相应的设计。在设计过程主控制器选用了德国beckhoff的软PLC,文中对其硬件模块的组态和编程环境TwinCA T 以及现场通讯协议Profibus-DP做了详细介绍和设计说明。偏航电机的控制选用了西门子G120变频器实现了变频调速,在恶劣环境下减小了偏航系统的振动。运用TwinCAT编程软件对偏航系统的四个部分:自动偏航、自动解缆、自动润滑、人工偏航的程序进行了编写。最后,在个人计算机进行了编译、下载和运行,在联机模式下,通过TwinCAT实时可视化的画面对各种状态进行了模拟运行,该偏航系统在各种状态下呈现出很好的控制效果。 关键词风力发电;偏航控制系统;软PLC Abstract Wind energy is a green energy. Wind power will fleetly develop in China,too. the technology for yaw syste m wasn’t still developed for a long time.Therefore,aim at this subject,related research and design will be reported in this thesis.Master controller used the German beckhoff soft PLC in the design process, Paper, the hardware modules to their configuration and programming environment TwinCAT and PROFIBUS-DP communication protocol site a detailed description and design specification. Electric motor control yaw selected Siemens G120 frequency converter frequency control in harsh environments reduces the yaw system vibration. TwinCAT programming software using the four parts of the yaw system: automatic yaw, automatic Cable release ,automatic lubrication, artificial yaw program was written. Finally, in the personal computer to compile, download and run, in online mode, real-time visualization by TwinCAT picture of the various state simulation run, the yaw system in various states shows good control effect. Key words Wind Power Generation; Yaw Control System; soft PLC 前言 能源是人类生存的基本要素,国民经济发展的主要物质基础。由于化石资源的日益枯竭和人类对全球环境恶化的倍加关注,风力发电技术也随之得到迅猛发展。偏航控制机构是风力机特有的伺服系统,用于控制风电机组跟踪变化的风向,并且当电缆发生缠绕时,能够自动解缆的功能,并能够定时润滑偏航机械机构。1 偏航控制系统硬件设计及选型 风力机的偏航系统由偏航检测机构、偏航控制机构和偏航驱动机构三大部分组成,其中偏航检测机构包括:风传感器、机舱位置传感器;偏航控制机构包括:偏航控制器、变频器;机械驱动机构包括:偏航轴承、偏航润滑系统、偏航驱动装置、偏航制动器。 1.1偏航检测机构 风向信号作为偏航控制系统中最关键的
第5章-风力发电机组机械传动系统-答案
风力发电技术与风电场工程 第五章练习题 习题答案 一、填空题 1、风力发电机组机械传动系统是指将风轮获得的空气动力以机械方式传递到发电机的整个轴系及其组成部分,由主轴、齿轮箱、联轴器、制动器和过载安全保护装置等组成。 2、传统的采用齿轮箱增速的风力发电机组传动系统形式按照主轴轴承的支撑方式,以及主轴与齿轮箱的相对位置来区分,主要有两点式、三点式、一点式和内置式四种。 3、直驱型风力发电机组的发电机分为外转子和内转子两种形式。 4、半直驱指采用比传统机组齿轮增速比较小的齿轮增速装置,使发电机的技术减少,从而缩小发电机的尺寸,便于运输和吊装。 5、主轴支撑风轮并将风轮的扭矩传递给齿轮箱,将轴向推力、气动弯矩传递给底座。 6、作用在主轴的载荷除了与风轮传来的外载荷有关外,还与风轮(主轴)的支撑形式的相对位置有关。 7、联轴器用于连接两传动轴,一般由两个半联轴节及连接件组成。 8、联轴器除了能传递所需的转矩外,还应具有补偿两轴线的相对位移或位置偏差,从而减小振动与噪声以及保护机器等性能。 9、常用的联轴器有刚性联轴器和弹性联轴器两种。 10、主轴与齿轮箱输入轴(低速轴)连接处应用刚性联轴器,在发电机与齿轮箱输出轴(高速轴)连接处应采用弹性联轴器。 11、机组制动包括机械制动、气动制动和发电机制动。 12、在风力发电机组中,最常用的机械制动器为液压盘式制动器。 13、常见的轮齿失效形式有轮齿折断、齿面点蚀、齿面胶合、齿面磨损、齿面塑性变形等。 14、在标准条件下齿轮箱的机械效率应达到大于97%。 15、齿轮箱的润滑方式有飞溅式、压力强制润滑式或混合式。 16、为了提高承载能力,齿轮一般都采用优质合金钢制造。 17、齿轮箱第一次换油应在首次投入运行500小时后进行,齿轮箱应每半年检修一次。 18、齿轮箱常见的故障有齿轮损伤、轴承损坏、断轴和油温高等。 19、齿轮箱油温最高不应超过80℃,不同轴承间的温差不得超过15℃。 20、偏航系统有被动偏航系统和主动偏航系统两种。 21、机舱可以两个方向旋转,旋转方向由接近开关进行检测。 22、偏航系统一般由偏航轴承、偏航驱动装置、偏航制动器、偏航计数器、纽缆保护装置、偏航液压装置等部件组成。 23、目前变桨系统执行机构主要有液压变桨距和电动变桨距两种,按其控制方式可分为统一变桨和独立变桨两种。 24、目前变桨距机组大多采用三个桨叶统一控制的方式,即三个桨叶变换是一致
风电机组控制安全系统安全运行的技术要求(正式)
编订:__________________ 单位:__________________ 时间:__________________ 风电机组控制安全系统安全运行的技术要求(正式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-5841-15 风电机组控制安全系统安全运行的 技术要求(正式) 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 控制与安全与系统是风力发电机组安全运行的大脑指挥中心,控制系统的安全运行就是保证了机组安全运行,通常风力发电机组运行所涉及的内容相当广泛就运行工况而言,包括起动、停机、功率调解、变速控制和事故处理等方面的内容。 风力发电机组在启停过程中,机组各部件将受到剧烈的机械应力的变化,而对安全运行起决定因素是风速变化引起的转速的变化。所以转速的控制是机组安全运行的关键。风力发电机组组的运行是一项复杂的操作,涉及的问题很多,如风速的变化、转速的变化、温度的变化、振动等都是直接威胁风力发电机组的安全运行。
一控制系统安全运行的必备条件 1、风力发电机组开关出线侧相序必须与并网电网相序一致,电压标称值相等,三相电压平衡。 2、风力发电机组安全链系统硬件运行正常。 3、调向系统处于正常状态,风速仪和风向标处于正常运行的状态。 4、制动和控制系统液压装置的油压、油温和油位在规定范围内。 5、齿轮箱油位和油温在正常范围。 6、各项保护装置均在正常位置,且保护值均与批准设定的值相符。
风力发电机组的传动装置
文章编号:100628244(2003)02235202 风力发电机组的传动装置 The D r ive system of the W i nd D r iven Generator 上海电力环保设备总厂 张 展 S hang ha i E lectric p o w er E nv iro m en ta l p rotection E qu ipm en t Ge m era l F actory ZH A N G Z han [摘要]本文简单介绍几种风力发电机增速箱的结构、原理和特点及其在风力发电机组中的应用。 [Abstract ]T h is paper b riefly in troduces structu re 、p rinci p le ,character of the w ind mo to r increaser and ap 2p licati on in w ind mo to r . 关键词:风力发电机 增速箱 Key w o rds :W ind mo to r Increaser 中图分类号:TM 315 文献标识码:B 风力发电机组是将风能转化为电能的机械。风轮是风力发电机组最主要的部件,由浆叶和轮毂组成。浆叶具有良好的空气动力外形,在气流作用下产生空气动力使风轮旋转,将风能转换成机械能,再通齿轮增速箱增速,驱动发电机转变成电能。 风力发电将是可再生洁净能源的自选,风力发电的优点:1)取之不尽可再生,我国幅员辽阔;2)洁净能源,随处可见;3)可不占地或少占地。 目前世界上风电机组在技术和工艺上比较发达,有良好质量保证体系的国家有美国、德国、丹麦、印度、荷兰、比利时等国。 我国风力发电以东北、西北、华北和东南沿海为主,地形平坦、运输条件和安装条件较好的新疆、内蒙及浅海地区以600k W 为宜;运输和安装条件不理想的沿海地区以300k W 为宜。但风机愈大,其经济效益愈明显。 国内主要应用地区有:内蒙、河北、浙江、山东、辽宁、吉林、黑龙江、广东、新疆 上述地区的60%安装600k W 机组为宜,40%安装300k W 为宜。 风力发电要求具有先进性、高可靠性、易维护性及经济性。增速箱是其主要部件之一,显然增速箱是保证上述要求的主要因素。本文将着重介绍风力发电机组中增速箱的有关问题。 1 10k W 风力发电增速箱 10k W 风力发电体能源部的科研项目,由水电 部杭州机械所主持,用于温州地区。 图1示10k W 风力发电增速箱的运动简图。采用两级2K —H (KG W )型行星传动,由行星架输入,太阳轮输出。输入转速n 1=88r m in 时,则输出转速 n 2=1500r m in ,即为发电机的转速,其增速比i =17 。 图1 2K —H 型两级增速箱简图 F ig .1 2K —H type tw o step increaser schem e 增速箱主要特点:1)高速级采用行星架浮动,低速级采用太阳轮浮动,这样使结构简化而紧凑,同时均载效果好。2)输入轴(即低速级行星架)的强度高、刚性大,加大支承,可承受大的径向力、轴向力和传递大的转矩,以适应风力发电的要求。3)行星架采用焊接结构,工艺简单,重量较轻。本增速箱系上海港联传动机械厂制造。 增速箱的测试是在上海交通大学内进行的,分别进行空载跑合,逐一加载至额定载荷,最后进行超载测试,共运行35h 。测得传动效率Γ=0.95左右。空载时的噪声不大于83.8dB (王点平均值),由于增 — 53—2003年6月DR I V E SYST E M T ECHN I QU E July 2003
风力发电控制系统
贝加莱风力发电控制系统 2009-05-18 09:24 1、蓬勃发展的风电技术 风力发电正在中国蓬勃发展,即使在金融危机的大形势下,风力发电行业仍然不断的加大投资。在2008年,风力发电仍然保持着30%以上的强劲增长势头,包括Vestas、Gemsa、GE、国内的金风科技、华锐、运达工程等其订单交付已经到2011年后。 国内的风力发电控制技术起步较晚,目前的控制系统均是由欧洲专用控制方案提供商提供的专用系统,价格高昂且交货周期较长。开发自主知识产权的控制系统必须要提上日程,一方面,由于缺乏差异化而使得未来竞争中的透明度过高,而造成陷入激烈的价格竞争,另一方面,寻找合适的平台开发自主的风电控制系统将使得制造商在未来激烈竞争中获得先手。 然而,风电控制系统必须满足风电行业特殊的需求和苛刻的指标要求,这一切都对风力发电的控制系统平台提出了要求,而B&R的控制系统,在软硬件上均提供了适应于风力发电行业需求的设计,在本文我们将介绍因何这些控制器能够满足风力发电的苛刻要求。 2、风力发电对控制系统的需求 2.1高级语言编程能力 由于功率控制涉及到风速变化、最佳叶尖速比的获取、机组输出功率、相位和功率因素,发电机组的转速等诸多因素的影响,因此,它包含了复杂的控制算法设计需求,而这些,对于控制器的高级语言编程能力有较高的要求,而B&R PCC产品提供了高级语言编程能力,不仅仅是这些,还包括了以下一些关键技术: 2.1.1复杂控制算法设计能力 传统的机器控制多为顺序逻辑控制,而随着传感器技术、数字技术和通信技术的发展,复杂控制将越来越多的应用于机器,而机器控制本身即是融合了逻辑、运动、传感器、高速计数、安全、液压等一系列复杂控制的应用,PCC的设计者们很早就注意到这个发展方向而设计了PCC 产品来满足这一未来的需求。 为了满足这种需求,PCC设计为基于Automation Runtime的实时操作系统(OS)上,支持高级语言编程,对于风力发电而言,变桨、主控逻辑、功率控制单元等的算法非常复杂,这需要一个强大的控制器来实现对其高效的程序设计,并且,代码安全必须事先考虑,以维护在研发领域的投资安全。 2.1.2功能块调用 PCC支持PLCopen Motion、PLCopen Safety和PLCopenHydraulic库
风力发电机偏航系统控制
题目:风力发电机偏航系统控制 风力发电机偏航系统控制 摘要 本文介绍了风力机的偏航控制机构、驱动机构的基础上,采用PLC作为主控单元,设计了风电机组的偏航控制系统。系统根据风向、风速传感器采集的数据,采取逻辑控制主动对风,实现了对风过程可控。论文给出了基于风向标、风速仪的偏航控制系统的软硬件设计结果。 关键词:
Wind turbine yaw control system Abstract In this paper, the wind turbine yaw control mechanism, drive mechanism, based on the use of single-chip PLC as the main control unit, designed for wind turbine yaw control system. Systems based on wind direction, wind speed data collected by sensors, logic control to take the initiative on the wind, to achieve controllability of the wind process. Papers are given based on the wind direction, wind speed sensor yaw control system hardware and software design. Key words:Wind turbine ;Yaw control system;
新能源风力发电机组传动系统
风力发电机齿轮箱简介 摘要 随着全球经济的迅速发展和人类生活水平的日益提高,对能源的需求越来越大,环境的破坏也渐趋严重,新能源的开发及利用是当今社会发展的必然趋势。风能作为一种清洁环保的绿色能源受到世界各国的青睐,而将风能转化为电能的装置--风力发电机的研究也是现在的一大热门主题。本文主要介绍了风力发电机传动系统的主要部分--齿轮箱,对其设计要求、结构类型、零部件进行了介绍,同时结合自身专业知识进对其工作环境、存在的失效故障问题进行了简单研究。 关键词:新能源;风力发电机;齿轮箱;工作环境;失效问题 ABSTRACT With the rapid development of global economy and the increasing of human living standard, the demand for energy is more and more large, the destruction of the environment is also becoming more serious, thedevelopment of new energy and utilization is the inevitable trend of social development.Wind power as a kind of clean and environmental protection green energy is favored by countries around the world, and the device which changes wind energy into electrical energy--wind turbine, theresearch of it is now a hot topic. The paper mainly introduced the drive system of wind turbines--gearbox, the design requirements, structure types and main components of it are introduced. At the same time, according to the own professional knowledge,the work environment and the existing questionabout fault has been simply studied by according to the own professional knowledge. Keywords:new energy sources;wind turbine;gear box;the work environment;the failure problems
风电综合信息化系统解决方案
风电综合信息化系统解决方案 1 项目概述 伴随我国国民经济的快速发展和人民生活水平的提高,人们对电力的依赖程度越来越高,同时电力生产也越来越受到资源和环境的制约。为了实现可持续发展战略,提高电能使用效率已成为我国能源战略的一项重要内容。由于我国资源的严峻形势,发展可持续资源是长久之计,风能是一种有巨大发展潜力的无污染可再生能源。发展可再生能源是最理想的能源,可以不受能源短缺的影响,但也受自然条件的影响,如需要有水力、风力、太阳能资源,而且最主要的是投资和维护费用高、效率低,所以发出的电成本高。现在许多国家都在积极寻找提高利用可再生能源效率的方法,相信随着地球资源的短缺,可再生能源将发挥越来越大的作用。 为了加强对各个风电场的管理,使风电集团能够直观、动态、综合地掌握下属各风电场生产一线的情况,杜绝风电机组运行和生产经营数据的错报、迟报、漏报,同时便于进行数据统计、分析以及提供技术支持,力控科技为许继许昌风电科技有限公司在总部建设一套风电场生产数据采集、监测、储存、分析、展现系统,以便风电集团能及时获取风电场生产及风电机组运行状态的信息,为集中监测、故障分析、技术支持、经营决策等提供及时、准确的数据基础。 2 系统整体拓扑结构介绍 2.1 集团调度中心系统建设 2.1.1 调度中心系统平台 调度中心信息化平台由实时服务器、历史服务器、关系数据库服务器、报警服务器、GIS地理信息系统服务器、WEB服务器以及各种辅助系统组成。 1) 实时服务器 实时数据服务器主要为系统提供实时数据管理支撑,主要负责处理、存储、管理电站采集传送来的实时数据,并为网络中的其它服务器和工作站提供实时数据。实时数据存放在
风电机组控制系统
风电机组控制系统 摘要:风电机组控制系统作为风电机组的重要组成部分,我们有必要对其进行详细的研究论述。本文主要介绍风电机组控制系统的组成结构和风电机组在运行时不同区域的基本控制策略,以及不同厂家在风电机组主要系统的实现上对软硬件采用情况。 关键词:风电机组 控制系统 构成 一、风电机组控制系统的组成结构 从实现功能的角度可以将控制系统分为:主控系统、变流控制系统、变桨距控制系统、偏航控制系统、液压控制系统及安全链保护。这些控制系统通常采用分布式控制系统,主控制器只有一个,且位于地面的塔筒柜里,而从控制器有好几个,这些从控制器之间是通过光纤、工业以太网、profibus 、CANbus 等进行通信的。为了能够更直观更清晰地了解控制系统的总体结构,以下将展示其结构图,具体如图1: 主控制器运行监控机组起停远程通信故障监测及保护动作电网、风况检测 人机界面 输入用户命令、变更参数 显示系统运行状态、统计 数据和故障 变桨距控制柜 桨距角调整 转速控制功率控制系统安全链系统紧急停机保护 偏航控制系统自动调向控制解缆控制液压站控制刹车机构压力控制机械刹车控制变流控制柜 交流励磁控制 并网控制 图1 控制系统的总体结构图 二、风电机组在运行时不同区域的基本控制策略 根据风速情况以及风力机功率特性,变速恒频风力发电机组的运行可以划分成很多区域,分别为:待机区、启动并网区、最大风能追踪区、转速限制区、功率限制区、切出保护区。 (1)待机区:控制系统的带电工作,保证所有执行机构和信号均处于正常状态。 (2)启动并网区:当风速达到切入风速时,风电机组起动,通过变桨距机
构调节桨距角使风力机升速,达到并网转速时,执行并网程序,使发电机组顺利切入电网,并带上初负荷。待发电机出口三相电压的电网电压满足同期条件时,接触器合闸,发电机并入电网。 (3)最大风能追踪区:风力发电机组运行在额定风速以下时,发电机输出功率未达到额定功率,此时控制目标为保持最佳叶尖速比,快速稳定的电机变速控制,尽可能将风能转化为输出的电能,实现风能最大捕获。 (4)转速恒定区:这一区域内发电机转速达到最大值,并保持恒定,风速逐步增大,机组功率因为发电机扭矩的增大而增加。而这个阶段,为了保护机组的安全运行,不再进行最大风能追踪,该区域的转速限制主要是通过调节发电机的电磁转矩实现的,功率曲线也较前一阶段平滑。 (5)功率恒定区:如果风速继续增大,发电机和变流器将达到其功率额定值,此时,只能减小风轮吸收的能量才能保障机组的安全,于是加入变桨距控制,增大桨距角,继续减小风能利用系数Cp,以维持机组的输出功率稳定在额定值。 (6)切出保护区:当风速继续增大,超过切出风速时,从保护机组的角度出发要将风力机叶片调至顺桨状态,风力发电机组切出电网,实现安全停机。 三、不同厂家在风电机组主要系统的实现上对软硬件采用情况 (1)关于主控系统 主控制器是电控系统的核心,要完成对机组运行参数和状态的检测和监控,同时要建立良好的人机交互界面和远程通讯的功能。 在主控系统的硬件上,几乎所有的厂家都选择PLC作为主控制器PLC系统因为构成灵活,扩展容易,以开关量控制为其特长,也能进行连续过程的PID回路控制,并能与上位机构成复杂的控制系统,实现生产过程的综合自动化;使用方便,编程简单,开发周期短,现场调试容易;能适应风电场恶劣的运行环境,可靠性强,所以完全适用于风电领域。 (2)关于变桨系统 变桨距是指风电机组安装在轮毂上的叶片借助控制技术和动力系统改变桨距角的大小从而改变叶片气动特性,使桨叶和整机的受力情况大为改善。 作为变桨系统,主要有两大技术路线,如下: 1.电动变桨方式:几乎所有的国内风机制造商以及GE、Enercon、Suzlon、Siemens都是采用该种变桨方式,驱动电机有直流电机和交流电机之分,传动方式有齿轮齿圈传动和齿形皮带传动(仅有金风一家)之分。 2.液压变桨方式:以Vestas和Gamesa两大国际风机巨头为代表。 两种变桨方式各有优缺点,两种系统在基本功能方面几乎是一致的,而在细节方面各有利弊,目前在电动型应用领域更为广泛。 (3)关于变流系统
风力发电机组控制系统
风力发电机组控制系统
风力发电机组控制系统功能研究 风力发电机组控制系统简介 风力发电机组由多个部分组成,而控制系统贯穿到每个部分,其相当于风电系统的神经。因此控制系统的质量直接关系到风力发电机组的工作状态、发电量的多少以及设备的安全性。 自热风速的大小和方向是随机变化的,风力发电机组的并网和退出电网、输入功率的限制、风轮的主动对封以及运行过程中故障的检测和保护必须能够自动控制。同时,风力资源丰富的地区通常都是边远地区或是海上,分散布置的风力发电机组通常要求能够无人值班运行和远程控制,这就对风力发电机组的控制系统的自动化程度和可靠性提出了很高的要求。与一般的工业控制过程不同,风力发电机组的控制系统是综合性控制系统。他不仅要监视电网、风况和机组运行参,对机组进行控制。而且还要根据风速和风向的变化,对机组进行优化控制,以提高机组的运行效率。 控制系统的组成 风力发电机由多个部分组成,而控制系统贯穿到每个部分,相当于风电系统的神经。因此控制系统的好坏直接关系到风力发电机的工作状态、发电量的多少以及设备的安全。目前风力发电亟待研究解决的的两个问题:发电效率和发电质量都和风电控制系统密切相关。对此国内外学者进行了大量的研究,取得了一定进展,随着现代控制技术和电力电子技术的发展,为风电控制系统的研究提供了技术基础。 风力发电控制系统的基本目标分为三个层次:这就是保证风力发电机组安全可靠运行,获取最大能量,提供良好的电力质量。 控制系统组成主要包括各种传感器、变距系统、运行主控制器、功率输出单元、无功补偿单元、并网控制单元、安全保护单元、通讯接口电路、监控单元。具体控制内容有:信号的数据采集、处理,变桨控制、转速控制、自动最
风力发电系统电气控制设计风电-毕设论文
毕业论文 风力发电系统电气控制设计 摘要 风力发电系统电气控制技术是风力发电在控制领域的关键技术。风力发电机组控制系统工作的安全可靠性已成为风力发电系统能否发挥作用,甚至成为风电场长期安全可靠运行的重大问题。在实际应用过程中,尤其是一般风力发电机组控制与检测系统中,控制系统满足用户提出的功能上的要求是不困难的。往往不是控制系统功能而是它的可靠性直接影响风力发电机组的声誉。有的风力发电机组控制系统的功能很强,但由于工作不可靠,经常出故障,而出现故障后对一般用户来说维修又十分困难,于是这样一套控制系统可能发挥不了它应有的作用。因此对于一个风力发电机组控制系统的设计和使用者来说,系统的安全可靠性必须认真加以考虑,必须引起足够的重视。 我们的目的是希望通过控制系统的设计,采取必要的手段使我们的系统在规定的时间内不出故障或少出故障,并且在出故障之后能够以最快的速度修复系统,使之恢复正常工作。 关键词:风力发电的基本原理;风力发电机的基础理论;风力发电控制系统;风轮机的气动特性;变桨距控制系统。
1绪论 1.1国内外风力发电的现状与发展趋势 风能属于可再生能源,具有取之不尽、用之不竭、无污染的特点。人类面临的能源、环境两大紧迫问题使风能的利用日益受到重视。我国的风能资源丰富,可利用的潜能很大,大力发展风、水电是我国长期的能源政策。而其中风电是可再生能源中最具发展潜力和商业开发价值的能源方式。从20世纪80年代问世的现代并网风力发电机组,只经过30多年的发展,世界上已有近50个国家开发建设了风电场(是前期总数的3倍),2002年底,风电场总装机容量约31128兆瓦(是前期总数的300倍)。 2005年以来,全球风电累计装机容量年平均增长率为27.3%,新增装机容量年平均增长率为36.1%,保持着世界增长最快能源的地位。2010年全球装机容量达196630MW,新装机容量37642MW,比去年同期增长23.6%。 目前,德国、西班牙和意大利三国的风电机组的装机容量约占到欧洲总量的65%。近年来,在欧洲大力发展风电产业的国家还有法国、英国、葡萄牙、丹麦、荷兰、奥地利、瑞典、爱尔兰。欧洲之外,发展风电的主要国家有美国、中国、印度、加拿大和日本。迄今为止,世界上已有82个国家在积极开发和应用风能资源。 海上风力资源条件优于陆地,将风电场从陆地向近海发展在欧洲已经成为一种新的趋势。有人把风电的发展规划为3步曲,陆上风电技术(当前技术)一近海风电技术(正研发技术)一海上风电技术(未来发展方向)。 2010年北美的装机容量有显著下降,美国年度装机容量首度不及中国;多数西欧国家风能发展处于饱和阶段,但风能产业在东欧国家得到显著发展;非洲风能发展主要集中在北非。 随着海上风电的迅速发展,单机容量为3 -6MW的风电机组已经开始进行商业化运行。美国7MW风电机组已经研制成功,正在研制10MW机组;英国10MW机组也正在进行设计,挪威正在研制14MW的机组,欧盟正在考虑研制20MW的风电机组,全球各主要风电机组制造厂家都在为未来更大规模的海上风电场建设做前期开发。 1.1.1世界上风力发电的现状 近年来,世界风电发展持续升温,速度加快。现主要以德国、西班牙、丹麦和美国的一些公司为代表,大规模地促进了风电产业化和风机设备制造业的发展。经过四、五年时间的整合,国际上风机制造业大约有十几家比较好的大企业。2003年底,全世界风电是3800万千瓦左右,而2003年一年就增加了400多万千瓦,仅德国到2003年底的装机容量就有1600万千瓦,其次是西班牙、美国、丹麦等国。国外风电的发展趋势,一是发展速度加快,二是风机机组从小型化向大型化发展,海上风电厂是下一步发展的主流。
风力发电机组主控制系统
. 密级:公司秘密 东方汽轮机有限公司 DONGFANG TURBINE Co., Ltd. 2.0MW108C型风力发电机组主控制系统 说明书 编号KF20-001000DSM 版本号 A 2014年7 月
. 编制 <**设计签字**> <**设计签字日期**> 校对 <**校对签字**> <**校对签字日期**> 审核 <**审核签字**> <**审核签字日期**> 会签 <**标准化签字**> <**标准化签字日期**> <**会二签字**> <**会二签字日期**> <**会三签字**> <**会三签字日期**> <**会四签字**> <**会四签字日期**> <**会五签字**> <**会五签字日期**> <**会六签字**> <**会六签字日期**> <**会七签字**> <**会七签字日期**> <**会八签字**> <**会八签字日期**> <**会九签字**> <**会九签字日期**> 审定 <**审批签字**> <**审批签字日期**> 批准 <**批准签字**> <**批准签字日期**> 编号
换版记录
目录 序号章 节名称页数备注 1 0-1 概述 1 2 0-2 系统简介 1 3 0-3 系统硬件11 4 0-4 系统功能 5 5 0-5 主控制系统软件说明12 6 0-6 故障及其处理说明64
0-1概述 风能是一种清洁环保的可再生能源,取之不尽,用之不竭。随着地球生态保护和人类生存发展的需要,风能的开发利用越来越受到重视。 风力发电机就是利用风能产生电能,水平轴3叶片风力发电机是目前最成熟的机型,它主要是由叶片、轮毂、齿轮箱、发电机、机舱、变频器、偏航装置、刹车装置、控制系统、塔架等组成。 风力发电机的控制技术和伺服传动技术是其核心和关键技术,这与一般工业控制方式不同。风力发电机组控制系统是一个综合性的控制系统,主要由机舱主控系统、变桨系统、变频控制系统三部分组成,通过现场总线以及以太网连接在一起,各个模块都有独立的控制单元,可独立完成与自身相关的功能(图0-1-1)。目的是保证机组的安全可靠运行、获取最大风能和向电网提供优质的电能。