【2018年整理】关于视觉器官的基本结构和视觉传导通路似的实验
关于视觉器官的基本结构和视觉传导通路的实验
实验题目:关于视觉器官的基本结构和视觉传导通路的实验
实验目的:1、复习视觉器官的基本结构;
2、掌握视觉形成的基本通路。
实验内容:观看视觉器官及视觉传导通路的挂图、模型。
实验结果:掌握了视觉器官的基本结构和视觉传导通路。现报告如下:
1、视网膜的结构特点:
视网膜的厚度只有0.1-0.5mm,但结构十分复杂。它的主要部分在个体发生上来自前脑泡,故属于神经性结构,其中细胞通过突触相互联系。主要分成两层:外层为色素细胞层,内层主要为位于后2/3部分、具有感光功能的视部,视网膜视部有外向内主要分成感光细胞层(包括视锥细胞和视杆细胞)、双极细胞层和神经节细胞层。
从靠近脉络膜的一侧算起,视网膜最外层是色素细胞层;这一层的来源不属神经组织,血液供应也来自脉络膜一侧,与视网膜其他层接受来自视网膜内表面的血液供应有所不同。色素细胞层对视觉的引起并非无关重要,它含在黑色素颗粒和维生素A,对同它相邻接的感光细胞起着营养和保护作用。保护作用是除了色素层可以遮继来自巩膜侧的散射光线外,色素细胞在强光照射视网膜时可以伸出伪足样突起,包被视杆细胞外段,使其相互隔离,少受其他来源的光刺激;只有在暗光条件下,视杆外段才被
暴露;色素上皮的这种活动受膜上的多巴胺受体控制。
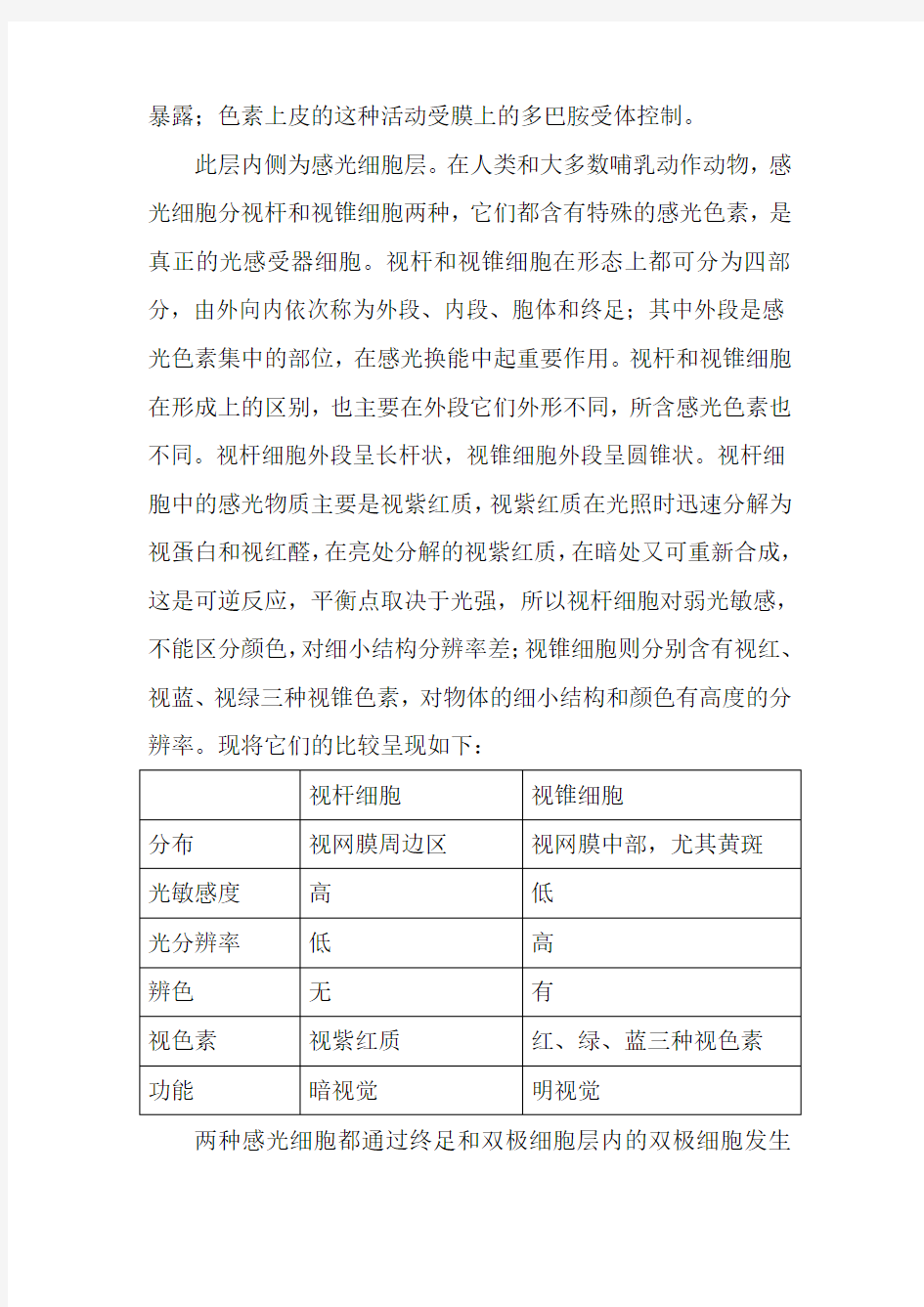
此层内侧为感光细胞层。在人类和大多数哺乳动作动物,感光细胞分视杆和视锥细胞两种,它们都含有特殊的感光色素,是真正的光感受器细胞。视杆和视锥细胞在形态上都可分为四部分,由外向内依次称为外段、内段、胞体和终足;其中外段是感光色素集中的部位,在感光换能中起重要作用。视杆和视锥细胞在形成上的区别,也主要在外段它们外形不同,所含感光色素也不同。视杆细胞外段呈长杆状,视锥细胞外段呈圆锥状。视杆细胞中的感光物质主要是视紫红质,视紫红质在光照时迅速分解为视蛋白和视红醛,在亮处分解的视紫红质,在暗处又可重新合成,这是可逆反应,平衡点取决于光强,所以视杆细胞对弱光敏感,不能区分颜色,对细小结构分辨率差;视锥细胞则分别含有视红、视蓝、视绿三种视锥色素,对物体的细小结构和颜色有高度的分辨率。现将它们的比较呈现如下:
两种感光细胞都通过终足和双极细胞层内的双极细胞发生
突触联系,双极细胞一般再和节细胞层中的神经节细胞联系。
视网膜中除了这种纵向的细胞间联系外,还存在横向的联系,如在感光细胞层和双极细胞层之间有水平细胞,大双极细胞层和节细胞层之间有无长突细胞;这些细胞的突起在两层细胞之间横向伸展,可以在水平方向传递信息,使视网膜在不同区域之间有可能相互影响;这些无长突细胞还可直接向节细胞传递信号。
盲点由节细胞层发出的神经轴突,先在视网膜表面聚合成一整束,然后它透视网膜,在眼的后极出眼球,这就在视网膜表面形成视神经乳头。在乳头的范围内,实际上没有视网膜特有的细胞结构,因而落于该处的光线或视网膜像的组成部分,将不可能被感知,故称为盲点。两侧视神经乳头在视网膜内黄斑或中央凹中心的鼻侧约3mm处。但正常时由于用两眼看物,一侧盲点可以被对侧视觉补偿,人们并不觉察自己的视野中有一处无视觉感受的区域。
2、视觉传导通路
视觉传导通路由3级神经元组成。第l级神经元为视网膜的双极细胞,其周围支与形成视觉感受器的视锥细胞和视杆细胞形成突触,中枢支与节细胞形成突触。第2级神经元是节细胞,其轴突在视神经盘(乳头)处集合向后穿巩膜形成视神经。视神经向后经视神经管入颅腔,形成视交叉后,延为视束。在视交叉中,只有一部分纤维交叉,即来自两眼视网膜鼻侧半的纤维交叉,走
视觉检测技术试验报告模板
视觉检测技术实验报告 试验题目: 宋体 三号 加粗 居中 学 院: 专 业 班 级: 学 号: 学 生 姓 名:
1.正文格式说明 论文格式基本要求: (1) 纸型:A4纸,单面打印; (2) 页边距:上3.5cm,下2.5cm,左2.5cm、右2.5cm; (3) 页眉:2.5cm,页脚:2cm,左侧装订。 (4) 字体:正文全部宋体、小四; (5) 行距:多倍行距:1.25,段前、段后均为0,取消网格对齐选项。 2.章节标题格式 (1) 每章的章标题选用模板中的样式所定义的“标题1”,居左;或者手动设置成字体:黑体,居左,字号:小三,1.5倍行距,段后11磅,段前为0。每章另起一页。章序号为阿拉伯数字。在输入章标题之后,按回车键,即可直接输入每章正文。 (2) 每节的节标题选用模板中的样式所定义的“标题2”,居左;或者手动设置成字体:黑体,居左,字号:四号,1.5倍行距,段后为0,段前0.5行。 (3) 节中的一级标题选用模板中的样式所定义的“标题3”,居左;或者手动设置成字体:黑体,居左,字号:小四,1.5倍行距,段后为0,段前0.5行。 正文各级标题编号的示例如图1.1所示。 图1.1 标题编号的示例 Fig. 1.1 Example of headers serial number 3.正文中的编号 正文中的图、表、附注、公式一律采用阿拉伯数字分章编号。
如图1.2,表2.3,附注4.5,式6.7等。如“图1.2”就是指本论文第1章的第2个图。文中参考文献采用阿拉伯数字根据全文统一编号,如文献[3],文献[3,4],文献[6-10]等,在正文中引用时用右上角标标出。附录中的图、表、附注、参考文献、公式另行编号,如图A1,表B2,附注B3,或文献[A3]。 4.图的格式说明 图在正文中的格式示例如图4.1所示。 图4.1 样式 Fig. 4.1 Manner 图4.1显示了论文模板中所定义的样式选择方法。使用鼠标选择相应的样式,对应的文字格式就发生相应改变。 图的格式描述 (1) 图的绘制方法 ①插图、照片应尽量通过扫描粘贴进本文。 ②简单文字图可用WORD直接绘制。 (2) 图的位置 ①图居中排列。 ②图与上文应留一行空格。 ③图中若有附注,一律用阿拉伯数字和右半圆括号按顺序编排,如注1),附注写在图的下方。 (3) 图的版式
视觉通路信息传递详述
神经系统对视觉信息的处理和传递 一、简介 狗为什么一听见铃声就分泌唾液?人们是怎样学习、记忆的?这些神奇的现象是如何发生,而神奇的背后就是科学家努力探索大脑发现的。神经科学几乎包括了自然科学的方方面面,神经系统(nervous system)是机体内起主导作用的系统。内、外环境的各种信息,由感受器接受后,通过周围神经传递到脑和脊髓的各级中枢进行整合,再经周围神经控制和调节机体各系统器官的活动,以维持机体与内、外界环境的相对平衡。人体各器官、系统的功能都是直接或间接处于神经系统的调节控制之下,神经系统是整体内起主导作用的调节系统。人体是一个复杂的机体,各器官、系统的功能不是孤立的,它们之间互相联系、互相制约;同时,人体生活在经常变化的环境中,环境的变化随时影响着体内的各种功能。这就需要对体内各种功能不断作出迅速而完善的调节,使机体适应内外环境的变化。实现这一调节功能的系统主要就是神经系统。 眼睛在很多方面就像一个照相机,但是眼睛捕捉到的图像远比照相机捕捉到的图像完整,不仅有形状颜色,还有空间位置和运动状态。这个复杂信息的获得是靠众多视觉系统的神经元来分工合作完成的,视网膜上投射的图像信息经过中枢神经系统来分析和诠释。 二、离视网膜投射 离开眼睛的神经通路始于视神经,称为离视网膜投射。离视网膜投射的组成部分依次为视神经、视交叉和视束。视神经自视盘处离开双眼,经眼球后部骨性眼眶内的脂肪组织,然后穿过颅底部垂体腺的前方。在视交叉,来自视网膜鼻侧的轴突相互交叉至对侧。之后,离视网膜投射的轴突形成视束,在软脑膜下方沿间脑的外侧表面行进。来自各自视网膜鼻侧的纤维在视交叉处进入对侧,因为关于左右半视野的所有信息均被导入大脑的对侧,视神经纤维在视交叉处交换,因此左半视野为大脑右半球所“看见”,右半视野为大脑左半球所“看见”。介导视觉感知的视觉通路如下图1所示。 图1.介导视觉感知的视觉通路
色度测量实验报告 (自动保存的)
基于WSD-1A 型装置的色度测量及计算崩溃 问题的解决 摘要 就是对颜色的度量,这种度量是对颜色的一种客观描述,色度测量在制版、打样、印刷等光学应用中非常重要。本文基于WSD-1A 型装置论述一般样品进行反射、透射定量测量的原理和步骤,以及测量过程中出现的复位失败、计算崩溃等问题的分析解决。 关键词:色度测量WSD-1A型实验装置 一、测量原理 (一)、色度学简介 色度学是研究颜色度量和评价方法的一门学科,是颜色科学领域里的一个重要部分。 颜色感觉与听觉、嗅觉、味觉等都是外界刺激使人感觉器官产生的感觉。光经过物体反射或透射后刺激人眼,人眼产生了此物体的光亮度和颜色的感觉信息,并将此信息传至大脑中枢,在大脑中将感觉信息进行处理,于是形成了色知觉。人们就可辨认出此物体的明亮程度、颜色类别,颜色纯洁的程度(明度、色调、饱和度)。外界光刺激——色感觉——色知觉是个复杂的过程,它涉及光学、光化学、视觉生理、视觉心理等各方面间题,要想度量色知觉量是很复杂的。心理物理学就是研究知觉量与外界刺激量之间关系而发展起来的一门学科。色度学要解决颜色的度量问题首先必须找到外界光刺激与色知觉量之间的对应关系,以便能用对光物理量的测量间接地测得色知觉量,因此应用了心理物理学的方法,通过大量的科学实验,建立了现代色度学。它是一门以光学、视觉生理、视觉心理、心理物理等学科为基础的综合性科学,也是一门以大量实验为基础的实验性科学。现代色度学初步解决了对颜色作定量描述和测量的问题。 描述颜色最简单的方法是用颜色名词。给每种颜色一个固定的名称,并冠以适合的形容词,将这些名词汇编成颜色名词词典,为人们互相交流色知觉信息提供了一种简单、古老的方式,但它不能定量地表示色知觉量。人们还用制作标准色卡的方式来描述颜色,色卡可以有不同分类及排队方式,因而形成了不同的表色系统。例如孟塞尔表色系统,它是按照色知觉的明度、色调及饱和度这三个特征量的大小排队,井按各特征量的差值相同的原则来制作色卡,给每个色卡一定的标号,以此种色卡作为目视测量颜色的标准。用这种系统来测量颜色,在一定条件下反映了人的色知觉量。用心理物理学方法经过大量实验,研究了人眼的视觉规律而建立起来的国际照明协会的CIE色度系统,可以用数字量来表示颜色,井可用物理仪器代表人眼来测量颜色。这部分内容是色度学中最基本的内容。用CIE色度系统度量的颜色是心理物理量,尚不能完全反映人们的色知觉。色度学这门科学最早开创于牛顿,他引入了颜色环的概念从而开创了建立颜色图的思想,他还提出了颜色混合中用重心原理来确定混合色结果的方法。19世纪,科学家格拉斯曼(Grassmann)、麦克斯韦(Maxwell)、赫姆霍尔兹(Helmholtz)等对色度学的进一步发展作出了巨大的贡献。奠定现代色度学基础的科学家有吉尔德(GuiId)、贾德(Judd )、麦克亚当(Macadam)、司梯鲁斯(Stiles)、莱特(Wright)和维泽斯基(Wyszecki)。从
视觉反应时实验报告
一、背景 在许多情况下,系统呈现一个刺激,要求操作者根据刺激的信息内容作出相应反应。一般将外界刺激出现到操作者根据刺激信息完成反应之间的时间间隔称为反应时。 反应时是人因工程学在研究和应用中经常使用的一种重要的心理特征指标。人的信息处理过程,大部分活动是在体内潜伏进行的,难以对信息接受、加工和传递各个阶段精确地进行实验测定。因此,在实践中往往利用反应时指标来近似说明人对信息处理过程的效率及影响因素。利用反应时可以分析人的感知觉、注意、识别、学习、唤醒水平、动作反应、定向运动、信号刺激量等,在此基础上,实现提高作业效率、监视水平和集中注意力等目的,合理制定作业标准,改进人机界面,改善作业条件和环境等。 二、实验目的 通过刺激概率、数奇偶不同排列、“刺激对”异同及时间间隔、信息量和数差大小排列五个小实验,加深对反应时概念的具体认知,比较不同颜色对反应时的影响,比较简单反应时与选择反应时的差异,寻找影响反应时、选择反应时的因素。为今后人机界面的改进打下基础。 三、实验场所 机械楼5楼,人因工程实验室。 四、实验仪器 BD-Ⅱ-511型视觉反应时测试仪(Visual Reaction Time Tester)。由单片机及有关控制电路、主试面板、被试面板等部分组成。可进行五大类十七组的反应时实验,包括经典反应时实验,也包括认知心理学的反应时实验。用于自动测量视觉的选择反应时,以及检测被试者的判别速度和准确性。 五、实验内容 1、刺激概率对反应时的影响 红、绿、黄三种色光分别作为刺激,每次试验选用一种色光刺激,仪器根据设定的组别,自动确定该组实验中“红”、“绿”、“黄”三种色光应出现的次数。按“红”、“绿”、“黄”三种色光出现次数的不同比例(概率)共分四组实验,即“概率1(组别为1)”、“概率2(组别为2)”、“概率3(组别为3)”、“概率4(组别为4)”。 回答可选用任一反应手键。每组实验完后,将自动反复显示本组实验中红、绿、黄三种色光的各自平均简单反应时及实验次数。 2、数奇偶不同排列特征对反应时的影响 根据数排列特征不同分成三组实验(“横和奇、偶”:数横向整齐排列——组别1;“竖和奇、偶”:数竖向整齐排列——组别2;“随机奇偶”:数随机排列——组别3)。 实验用红色光刺激,被试判别显示点之和是奇数还是偶数,用反应手键回答。如左右刺激点数和为奇数,按“左”键;为偶数,按“右”键。回答正确,显示器自动显示每一次正确判断的反应时间;回答错误,蜂鸣声响提示,自动记录错误次数。实验结束,仪器自动显示正确回答的平均选择反应时及错误回答次数。
反应时的测定实验报告
. 人因工程课程设计 —反应时的测量实验报告 专业工业工程 学号 1240408110 姓名志伟 指导老师吴俊 成绩 2015年06月30日
实验报告——反应时的测量 【摘要】本次试验的目的是学习视觉简单反应时、选择反应时和辨别反应时的测定方法以及仪器的使用、材料的整理计算,并比较三种反应时的时间差异以及探讨影响反应时的因素。经过分析实验结果数据得出的结论为:被试作出反应所需时间是由刺激的复杂程度决定的。即简单反应时所需反应时间小于选择反应时所需时间。选择反应时和辨别反应时不存在显著的性别差异。 【关键词】简单反应时选择反应时辨别反应时多项职业能力测量仪1.引言 反应时是人因工程学在研究和应用中经常使用的一种重要的心理特征指标。人的信息处理过程,大部分活动是在体潜伏进行的,难以对信息接受、加工和传递各个阶段精确地进行实验测定。因此,在实践中往往利用反应时指标来近似说明人对信息处理过程的效率及影响因素。利用反应时可以分析人的感知觉、注意、识别、学习、唤醒水平、动作反应、定向运动、信号刺激量等,在此基础上,实现提高作业效率、监视水平和集中注意力等目的,合理制定作业标准,改进人机界面,改善作业条件和环境等。 反应时指刺激作用于有机体后到明显的反应开始时所需要的时间。刺激作用于感官引起感官的兴奋,兴奋传到大脑,并对其加工,再通过传出通路传到运动器官,运动反应器接受神经冲动,产生一定反应,这个过程可用时间作为标志来测量,这就是反应时。 本实验采用的是荷兰心理学家 F.C.唐德斯的研究结果。测量最基本的三种反应时,即简单、选择、辨别反应时。唐德斯将它们分别命名为:a、b、c反应时。(1)简单反应时(RTA) 在测试中呈现的刺激和要求被试做出的反应都只有一个,且固定不变。本实验程序可测量视觉、听觉两种简单反应时。视觉的刺激为一绿圆,听觉的刺激为773Hz纯音。测量方式一样,被试均按绿键反应。测30次,每次预备后间隔2秒呈现刺激。如果测试中被试在准备阶段有抢先现象,则该次结果无效,并由计算机剔除并警告抢码被试。另外以每5次呈现为一组,随机加入空白的探测刺激2秒,如有被试在此时抢码,则警告抢码被试,且本组实验将重新进行。最后以 2
机器视觉与智能检测相关课题创新实践-实验报告
《机器视觉与智能检测相关创新实践》 课外实验报告 实验一、图像融合 1.实验内容: 对同一场景的红外图像和可见光图像进行融合,采用图1中的参考图形,以及自己 的手掌图像(可见光图像和红外光图像),并对结果进行简要分析,融合方法可采 用以下方法中的一种或多种:直接加权融合方法,傅里叶变换融合方法,小波变换 融合方法; 2.实验目标: 1). 了解融合的概念; 2). 比较融合方法中不同参数的效果(如直接加权融合中权值的分配) 3.参考图像: (a)红外图像(b)可见光图像 图1 待融合图像 4.实验内容 1)直接加权融合方法: 线性混合操作也是一种典型的二元(两个输入)的像素操作:
通过在范围内改变。 核心代码:image((Y1+Y2)/2); %权值相等 图2 直接融合图像1 图3 直接融合图像2 改变参数的影响:那个图的参数比例高,那个图在融合图像中的影响就越高。2)傅里叶变换融合:
对一张图像使用傅立叶变换就是将它分解成正弦和余弦两部分。也就是将图像从空间域(spatial domain)转换到频域(frequency domain)。然后通过在频域的处理来实现融合。 图4傅里叶变换融合图像1 图5 傅里叶变换融合2 3)小波融合: 小波变换(Wavelet Transform)是一种新型的工程数学工具,由于其具备的独特数学性质与视觉模型相近,因此,小波变换在图像处理领域也得到了广泛的运用。用在图像融合领域的小波变换,可以说是金字塔方法的直接拓展。
图6 小波融合1 图7 小波融合2 5.实验完整代码 1.直接融合 addpath('E:\学习\课件\机器视觉创新实践\曾东明') Y1=imread('1.PNG'); subplot(1,3,1); imshow(Y1); title(' 直接融合1.PNG');
视觉通路
视觉通路 背侧通路:where通路,视皮层一些区域联合形成的系统,参与空间位置知觉,开始于纹状皮层,结束于后顶叶。 腹侧通路:what通路,视皮层的一些区域联合形成的系统,参与形状知觉,开始于纹状皮层,结束于下颞叶。 躯体感觉通道: 面部感觉信息通过三叉神经传递 皮肤、肌肉体感器官信息通过脊髓传导,有两种: 背侧柱-内侧丘系通路:传递精确定位的信息(触觉),通过脊髓背侧柱上行至延髓,在延脑中交换至对侧后通过内侧丘系传至丘脑腹后侧核即躯体感觉终继核团。 脊髓-丘脑通路:传递非精确定位的信息(温度觉等),一到达脊髓即与其他神经元形成联结,交换至对侧后通过脊髓丘脑通路上行至丘脑腹后侧核。 听觉通路: 耳蜗神经节→延髓耳蜗核→上橄榄核群(外侧丘系)→中脑下丘→丘脑内侧膝状体→颞叶。视觉失认症: 视敏度正常,但由于脑损伤导致无法正确知觉,视觉联合皮层 统觉视觉失认症:高级视知觉缺失视敏度正常仍无法知觉物体 联想视觉失认症:视知觉与言语系统分离导致,可以描画不能命名,可以借助其他感觉帮助命名 光感受器: 视杆细胞:1.2亿视网膜周围中央凹周围弱光提供黑白信息视敏度低 视锥细胞:600万视网膜中央中央凹中强光提供色彩信息视敏度高 感受野: 视野的一部分,呈现于该细胞感受野内的光线刺激引起该细胞发放率的变化,由近似圆形的中心部和环形的外周部组成。刺激中心部和外周部引起相反的变化:ON细胞被呈现在中央部的光线激活,被外周部的光线抑制,OFF细胞相反。 味觉通道: 舌尖通过面神经分支鼓索传递到孤束核,舌头尾端通过舌咽神经和迷走神经到达孤束核,孤束核将轴突传至丘脑腹后内侧核,在传至前额叶底部和岛叶初级味觉皮层。 睡眠阶段: 第一阶段,3.5~7.5HZ的θ波10min;第二阶段,纺锤波和K复合波出现15min;第三阶段,δ波出现,δ波占脑电波的20%~50% 20min,第四阶段,δ波占脑电波的50%以上45min。血脑屏障: 大脑细胞和血管之间液体传递和交换的屏障,由血管的内皮细胞生成。具有选择性通透作用。动作电位: 刺激达到一定强度时,电压依赖性的钠离子通道开启,钠离子内流,去极化开始,动作电位产生;钾离子通道开启,钾离子外流;钠离子通道失活,钾离子继续外流至静息电位;膜电位继续下降,超极化开始,纳钾转运体开始运作,膜电位渐渐回复到静息电位。 全或无: 动作电位或者不产生,或者产生额定强度的电位。动作电位一产生,将沿着轴突一直传递至尾端,传导过程中,动作电位强度不变。 频率法则: 通过动作电位激发频率表达变化的信息。高频率的动作电位激发高强度的肌肉收缩;高强度的刺激(强光线)将产生眼神经高频率的激发。
系解笔记(传导通路)
教学内容:神经系统的传导通路 目的要求: 1.掌握躯体和四肢意识性本体感觉、头面部浅感觉、视觉和瞳孔对光反射的传导通路,锥体系的组成,锥体束的组成,皮质脊髓束和皮质核束的起止、行径特点、功能及受损后的症状。 2.熟悉躯体和四肢浅感觉,视觉传导通路的不同部位受损时所引起的视野缺损,上、下运动神经元的位置。 3.了解听觉传导通路,瞳孔对光反射通路不同部位受损时的瞳孔变化,上、下运动神经元损伤后的临床表现比较,锥体外系的概念。 神经系统的传导通路Conductive pathway of nervous system 感觉(上行)传导通路Sensory (ascending) pathways 运动(下行)传导通路Motor (descending) pathways 感觉传导通路Sensory pathways 感觉传导通路Sensory pathways 感觉类别感觉器 浅感觉皮肤、粘膜 (痛、温、触、压觉) 深感觉肌肉、肌腱、关节 (运动觉、震动觉、位置觉) 视觉视网膜上感光细胞 听觉螺旋器 平衡觉壶腹嵴、橢圆囊斑、球囊斑 嗅觉嗅粘膜 味觉味蕾 一、本体(深)感觉传导通路 1.本体感觉的含义 2.躯体和四肢意识性本体感觉和精细触觉传导通路 传导至大脑, 引起意识性感觉. 3.躯体和四肢非意识性本体感觉传导通路 传导至小脑, 不产生意识性感觉, 只是反射性调节躯干、四肢的肌张力和协调运动, 以维持身体姿势和平衡. (一)躯体和四肢意识性本体感觉和精细触觉传导通路
丘脑腹后外侧核Central radiation of thalamus 薄束核 楔束核 脊神经节 薄束楔束 (二)躯体和四肢非意识性本体感觉传导通路(略) 二、痛温觉、粗触觉和压觉传导通路 (一)躯干和四肢浅感觉传导通路 Ⅷ层②中央后回上、中部和中央旁小叶后部. 丘脑中央辐射Central radiation of thalamus 丘脑腹后外侧核脊髓丘系 脊髓丘脑前、侧束 脊神经节 躯干和四肢的深感觉和浅感觉传导通路的异同: ●传导路的交叉:浅感觉先交叉后上行,深感觉先上行后交叉. ●传导路由三级神经元完成,经过两次换元,从第二次换元起路径同. 中枢突 丘脑腹后内侧核③ 中央后 三叉丘系 丘脑中央辐射Central radiation of thalamus 丘脑腹后内侧核三叉神经脑桥核三叉神经脊束核
测量反应时的实验报告
测量反应时的实验报告 Prepared on 22 November 2020
实验报告——反应时的测量 一、摘要:本次试验的目的是学习视觉简单反应时、选择反应时和辨别反应时的测定方法以及仪器的使用、材料的整理计算,并比较三种反应时的时间差异以及探讨影响反应时的因素。通过计算比较发现,选择反应时最长,简单反应时最短。 二、关键词:简单反应时 三、引言 1、解释术语 简单反应时:一个反应仅对应于一个刺激,当一个刺激呈现时,就立即对其作出反应,这种反应时间也成为A反应时间; 2、实验目的:通过反应时实验学习使用减法反应时法。 四、方法 1、被试:吉林化工学院,资源与环境工程学院,安全工程专业。 2、仪器:反应时测试仪器 3、实验过程 (1)准备工作:接通仪器电源,主试打开开关,选择简单反应时实验按钮,等到仪器左边第一个灯亮起的同时,告知被试实验开始,然后开始正式实验过程。 (2)练习操作:被试坐在仪器的正前方,用一根手指放在按压器上,当听到主试“开始”的信号时,被试集中注意,约两三秒钟后,刺激开始间隔出现。当被试看到主试要求给出反应的刺激颜色时,立即按压。当听到简单反应时完成的提示音时,按“打印”键打印数据。练习实验作2-3次。 (3)正式实验: A、简单反应时
①主试选择一种颜色,并且告诉被试,选择颜色---红色。然后被试按照练习操作步骤中的做法,只要一看到显示灯亮了就按按钮,如此反复做20次,然后打印出实验数据。 ②当被试提前做出反应或者做出错误反应或者反应时间超过4秒时,仪器自动进行系统复位,重新进行实验。 ③一直做完20次后,仪器自动提示实验完毕。 B、选择反应时 ①这次实验主试不用选择颜色。被试按照练习操作步骤中的做法,只要一看到显示灯亮了就按与显示灯相对应颜色的按钮,如此反复做20次,然后打印出实验数据。 ②当被试提前做出反应或者做出错误反应或者反应时间超过4秒时,仪器自动进行系统复位,重新进行实验。 ③一直做完20次后,仪器自动提示实验完毕。 C、辨别反应时 ①主试选择一种颜色,并且告诉被试,选择颜色---红色。然后被试按照练习操作步骤中的做法,只要一看到显示灯是红色就按按钮,其他颜色则不做操作。如此反复做20次,然后打印出实验数据。 ②当被试提前做出反应或者做出错误反应或者反应时间超过4秒时,仪器自动进行系统复位,重新进行实验。 ③一直做完20次后,仪器自动提示实验完毕。 五、实验结果 1、实验数据结果处理 被试简单反应时 (s)选择反应时 (s) 辨别反应时 (s) 1 2 3
视觉反应时实验报告
实验心理学实验报告 实验名称视觉反应时测量 一、实验目的 学会测量视觉简单反应时、辨别反应时、选择反应时的方法;比较视觉简单平均反应时、辨别平均反应时、选择平均反应时之间的差别。 二、实验设备 反应时测定仪 BD-II-510A型,记录纸、笔。 三、实验方法 接通仪器电源,主试打开开关,看仪器是否正常工作 四、实验人员 主视者:吴琪被试者:高爽记录者:张雨林 1.简单反应时部分 刺激呈现放在离被试1米处,被试以右手食指按在反应键任一孔上,主试按“启动键”。被试当感觉到刺激出现时,立即按压电键。当经过10次按键操作后(不包括错误次数),仪器最后得出的平均反应时即被试10次反应的平均反应时。记录人员记下成绩。 2.辨别反应时部分 主试按预先列出的程序操作信号呈现开关,发出“红”、“黄”、“蓝”、“绿”四种不同的光刺激。被试以右手食指作按键状,当感觉到红色光时,立即按压红色的反应键(即被试只对红色刺激作出反应,对其他颜色的光不作反应。反应时测定仪呈现视觉刺激,每种颜色刺激呈现10次,共做4组,仪器最后得出的平均反应时即被试10次反应的平均反应时。在记录纸(见附表)上记录每组实验被试的平均反应时。 3.选择反应时部分 主试按预先列出的程序操作信号呈现开关,发出“红”、“黄”、“蓝”、“绿”四种不同的光刺激。被试以右手食指作按键状,当感觉到某种色光时,立即按压相应的反应键(即被试只对四种不同的刺激相应作出四种不同的反应),反应时测定仪呈现视觉刺激,一组刺激呈现10次,做1组,仪器最后得出的平均反应时即被试10次反应的平均反应时。在记录纸(见附表)上记录每组实验被试的平均反应时。 五、实验结果
人工智能YOLO V2 图像识别实验报告材料
第一章前言部分 1.1课程项目背景与意义 1.1.1课程项目背景 视觉是各个应用领域,如制造业、检验、文档分析、医疗诊断,和军事等领域中各种智能/自主系统中不可分割的一部分。由于它的重要性,一些先进国家,例如美国把对计算机视觉的研究列为对经济和科学有广泛影响的科学和工程中的重大基本问题,即所谓的重大挑战。计算机视觉的挑战是要为计算机和机器人开发具有与人类水平相当的视觉能力。机器视觉需要图象信号,纹理和颜色建模,几何处理和推理,以及物体建模。一个有能力的视觉系统应该把所有这些处理都紧密地集成在一起。作为一门学科,计算机视觉开始于60年代初,但在计算机视觉的基本研究中的许多重要进展是在80年代取得的。计算机视觉与人类视觉密切相关,对人类视觉有一个正确的认识将对计算机视觉的研究非常有益。 计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理,使电脑处理成为更适合人眼观察或传送给仪器检测的图像。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取‘信息’的人工智能系统。这里所指的信息指Shannon定义的,可以用来帮助做一个“决定”的信息。因为感知可以看作是从感官信号中提取信息,所以计算机视觉也可以看作是研究如何使人工系统从图像或多维数据中“感知”的科学。 科学技术的发展是推动人类社会进步的主要原因之一,未来社会进一步地朝着科技化、信息化、智能化的方向前进。在信息大爆炸的今天,充分利用这些信息将有助于社会的现代化建设,这其中图像信息是目前人们生活中最常见的信息。利用这些图像信息的一种重要方法就是图像目标定位识别技术。不管是视频监控领域还是虚拟现实技术等都对图像的识别有着极大的需求。一般的图像目标定位识别系统包括图像分割、目标关键特征提取、目标类别分类三个步骤。 深度学习的概念源于人工神经网络的研究。含多隐层的多层感知器就是一种深度学习结构。深度学习通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。深度学习的概念由Hinton等人于2006年提出。基于深度置信网络提出非监督贪心逐层训练算法,为解决深层结构相关的优化难题带来希望,随后提出多层自动编码器深层结构。此外Lecun等人提出的卷积神经网络是第一个真正多层结构学习算法,它利用空间相对关系减少参数数目以提高训练性能。
关于视觉器官的基本结构和视觉传导通路的实验
关于视觉器官的基本结构和视觉传导通路的实验 实验题目:关于视觉器官的基本结构和视觉传导通路的实验 实验目的:1、复习视觉器官的基本结构; 2、掌握视觉形成的基本通路。 实验内容:观看视觉器官及视觉传导通路的挂图、模型。 实验结果:掌握了视觉器官的基本结构和视觉传导通路。现报告如下: 1、视网膜的结构特点: 视网膜的厚度只有0.1-0.5mm,但结构十分复杂。它的主要部分在个体发生上来自前脑泡,故属于神经性结构,其中细胞通过突触相互联系。主要分成两层:外层为色素细胞层,内层主要为位于后2/3部分、具有感光功能的视部,视网膜视部有外向内主要分成感光细胞层(包括视锥细胞和视杆细胞)、双极细胞层和神经节细胞层。 从靠近脉络膜的一侧算起,视网膜最外层是色素细胞层;这一层的来源不属神经组织,血液供应也来自脉络膜一侧,与视网膜其他层接受来自视网膜内表面的血液供应有所不同。色素细胞层对视觉的引起并非无关重要,它含在黑色素颗粒和维生素A,对同它相邻接的感光细胞起着营养和保护作用。保护作用是除了色素层可以遮继来自巩膜侧的散射光线外,色素细胞在强光照射视网膜时可以伸出伪足样突起,包被视杆细胞外段,使其相互隔离,少受其他来源的光刺激;只有在暗光条件下,视杆外段才被
暴露;色素上皮的这种活动受膜上的多巴胺受体控制。 此层内侧为感光细胞层。在人类和大多数哺乳动作动物,感光细胞分视杆和视锥细胞两种,它们都含有特殊的感光色素,是真正的光感受器细胞。视杆和视锥细胞在形态上都可分为四部分,由外向内依次称为外段、内段、胞体和终足;其中外段是感光色素集中的部位,在感光换能中起重要作用。视杆和视锥细胞在形成上的区别,也主要在外段它们外形不同,所含感光色素也不同。视杆细胞外段呈长杆状,视锥细胞外段呈圆锥状。视杆细胞中的感光物质主要是视紫红质,视紫红质在光照时迅速分解为视蛋白和视红醛,在亮处分解的视紫红质,在暗处又可重新合成,这是可逆反应,平衡点取决于光强,所以视杆细胞对弱光敏感,不能区分颜色,对细小结构分辨率差;视锥细胞则分别含有视红、视蓝、视绿三种视锥色素,对物体的细小结构和颜色有高度的分辨率。现将它们的比较呈现如下: 视杆细胞视锥细胞 分布视网膜周边区视网膜中部,尤其黄斑 光敏感度高低 光分辨率低高 辨色无有 视色素视紫红质红、绿、蓝三种视色素 功能暗视觉明视觉 两种感光细胞都通过终足和双极细胞层内的双极细胞发生
测量反应时的实验报告
实验报告——反应时的测量 一、摘要:本次试验的目的是学习视觉简单反应时、选择反应时和辨别反应时 的测定方法以及仪器的使用、材料的整理计算,并比较三种反应时的时间差异以及探讨影响反应时的因素。通过计算比较发现,选择反应时最长,简单反应时最短。 二、关键词:简单反应时 三、引言 1、解释术语 简单反应时:一个反应仅对应于一个刺激,当一个刺激呈现时,就立即对其作出反应,这种反应时间也成为A反应时间; 2、实验目的:通过反应时实验学习使用减法反应时法。 四、方法 1、被试:吉林化工学院,资源与环境工程学院,安全工程专业11360128,秦世瑞。 2、仪器:反应时测试仪器 3、实验过程 (1)准备工作:接通仪器电源,主试打开开关,选择简单反应时实验按钮,等到仪器左边第一个灯亮起的同时,告知被试实验开始,然后开始正式实验过程。(2)练习操作:被试坐在仪器的正前方,用一根手指放在按压器上,当听到主试“开始”的信号时,被试集中注意,约两三秒钟后,刺激开始间隔出现。当被试看到主试要求给出反应的刺激颜色时,立即按压。当听到简单反应时完成的提示音时,按“打印”键打印数据。练习实验作2-3次。 (3)正式实验: A、简单反应时 ①主试选择一种颜色,并且告诉被试,选择颜色---红色。然后被试按照练习操作步骤中的做法,只要一看到显示灯亮了就按按钮,如此反复做20次,然后打印出实验数据。 ②当被试提前做出反应或者做出错误反应或者反应时间超过4秒时,仪器自动进行系统复位,重新进行实验。 ③一直做完20次后,仪器自动提示实验完毕。 B、选择反应时 ①这次实验主试不用选择颜色。被试按照练习操作步骤中的做法,只要一看到显示灯亮了就按与显示灯相对应颜色的按钮,如此反复做20次,然后打印出实验数据。 ②当被试提前做出反应或者做出错误反应或者反应时间超过4秒时,仪器自动进
计算机视觉实验报告Experiment3
Experiment 3:Edge Detection Class: 电子1203班Student ID: 1210910322 Name: 王影 Ⅰ. Aim The aim of this laboratory session is to learn to deal with image data by Matlab. By the end of this session, you should be able to perform image preprocessing of edge detection in spatial domain and frequency domain. Ⅱ. Knowledge required in the Experiment ⅰ.You are supposed to have learned the basic skills of using Matlab; ⅱ.You need to review Matlab programming language and M-file format. ⅲ. You should have studied edge detection methods. Ⅲ.Experiment Contents Demand: Please show the figure on the left and list the codes on the right respectively bellow each question.(请将运行结果(图片)和程序代码贴在每题下方) ⅰ.Read “car.jpg” file (to do this by imread function), convert the color image into grayscale image, and then perform edge detection using Roterts, Prewitt, Sobel operator separately in spatial domain and display the results in a Matlab window. 程序: clear; im=imread('car.jpg'); I=rgb2gray(im); subplot(3,2,1);imshow(I); title('Gray image'); [Y,X]=size(I); im_edge=zeros(Y,X); T=30; for k=2:Y-1 for kk=2:X-1 im_edge(k,kk)=abs(I(k+1,kk+1)-I(k,kk))+abs(I(k,kk+1)-I(k+1,kk)); if (im_edge(k,kk)>T)
机器视觉实验报告
机器视觉实验报告
目录 一实验名称 (2) 二试验设备 (2) 三实验目的 (2) 四实验内容及工作原理 (2) (一)kinect for windows (2) (二)手持式自定位三维激光扫描仪 (3) (三)柔性三坐标测量仪 (9) (四)双面结构光 (10) 总结与展望 (14) 参考文献 (16)
《机器视觉》实验报告 一、实验名称 对kinect for windows、三维激光扫描仪、柔性三坐标测量仪和双面结构光等设备结构功能的认识。 二、实验设备 kinect for windows、三维激光扫描仪、柔性三坐标测量仪、双面结构光。 三、实验目的 让同学们对机器视觉平时所使用的仪器设备以及机器视觉在实际运用中的具体实现过程有一定的了解。熟悉各种设备的结构功能和操作方法,以便于进行二次开发。其次,深化同学们对机器视觉系统的认识,拓宽同学们的知识面,以便于同学们后续的学习。 四、实验内容及工作原理 (一)kinect for windows 1.Kinect简介 Kinectfor Xbox 360,简称Kinect,是由微软开发,应用于Xbox 360 主机的周边设备。它让玩家不需要手持或踩踏控制器,而是使用语音指令或手势来操作Xbox360 的系统界面。它也能捕捉玩家全身上下的动作,用身体来进行游戏,带给玩家“免控制器的游戏与娱乐体验”。2012年2月1日,微软正式发布面向Windows系统的Kinect版本“Kinect for Windows”。 2.硬件组成 Kinect有三个镜头[1],如图1-1所示。中间的镜头是RGB 彩色摄影机,用来采集彩色图像。左右两边镜头则分别为红外线发射器和红外线CMOS 摄影机所构成的3D结构光深度感应器,用来采集深度数据(场景中物体到摄像头的距离)。彩色摄像头最大支持1280*960分辨率成像,红外摄像头最大支持640*480成像。Kinect还搭配了追焦技术,底座马达会随着对焦物体移动跟着转动。Kinect也内建阵列式麦克风,由四个麦克风同时收音,比对后消除杂音,并通过其采集声音进行语音识别和声源定位[2][3]。
视觉检测实验报告1
视觉检测技术试验 题目:MV-BDP2000S视觉皮带传送试验台功能认识试验 学院:信息科学与工程学院 专业班级:测控技术与仪器1401 学号:14040110X 学生姓名:李二狗 指导教师:宋辉 设计时间:2017.11.06
目录 一、试验台介绍 (1) 1.1试验台主要构成 (1) 1.1.1机柜部分 (2) 1.1.2传送部分 (2) 1.1.3视觉检测部分 (2) 1.1.4分选机构部分 (2) 1.2主要器件的关键指标 (2) 1.2.1工业数字相机 (2) 1.2.2光源 (3) 二、仪器操作及配置流程 (4) 2.1视觉检测部分的调试 (4) 2.1.1调节相机前后位置的方法 (4) 2.1.2调节相机高度的方法 (5) 2.1.3调节光源高度的方法 (5) 2.2设备性能的调试 (6) 2.2.1运动性能调试的参数 (6) 2.2.1视觉检测性能调试的步骤 (6) 三、仪器主要测量指标分析 (7) 3.1OCR&OCV字符识别指标分析 (7) 3.3.1 OCR检测的参数 (7) 3.2 尺寸测量指标分析 (8) 3.2.1 尺寸测量的参数 (8) 四、仪器采集或测量的试样 (9) 4.1字符识别试验结果 (9) 4.2 尺寸测量试验结果 (10) 4.3 实验总结 (11)
一、试验台介绍 本次试验中以维视数字图像技术有限公司(MICROVISION)推出MV-BDP200S机器视觉皮带传送实验开发平台(高级型)作为主要的实验设备,主要针对小型电子产品的外形和外观检测等,应用于提供高效的产品质量控制系统。本设备采用MV-MVIPS机器视觉图像处理控制器软件,该软件具有强大的缺陷识别功能、测量功能、色差检测、OCR&OCV识别检测,主要针对检测各类小型机械或电子产品的外观和外形,对于OK和NG产品实施分类管理放置。同时硬件上设计了组合式的照明及控制系统,创造了一个最优的光照系统及相对封闭的工作环境,有效的解决了环境对检测精度的影响,同时满足了待检产品对光照条件的要求。运用强大的检测及分析软件工具对被测产品进行定位、测量、分析。 1.1试验台主要构成 从整体外观来看,设备可以分为以下几个部分:机柜部分、传送部分、视觉检测部分、分选机构部分。设备的整体视图如图1所示: 图1整体设备部分视图
机器视觉测量实验报告
《机器视觉应用实验报告》 姓 名 黄柱汉 学 号 201341304523 院 系 机械与汽车工程学院 专 业 仪器仪表工程 指导教师 全燕鸣 教授 2015年04月16日
华南理工大学实验报告 课程名称:机器视觉应用 机械与汽车工程学院系仪器仪表工程专业姓名黄柱汉 实验名称机器视觉应用实验日期2015.4.16 指导老师全燕鸣 一、实验目的 主要目的有以下几点: 1.实际搭建工业相机、光源、被摄物体图像获取系统,自选Labview或Matlab、 Halcon、Ni Vision软件平台,用打印标定板求解相机内外参数以及进行现场 系统标定; 2.进行一个具体实物体的摄像实验,经图像预处理和后处理,获得其主要形状 尺寸的测量(二维) 3.进行一个具体实物体的摄像实验,经图像预处理和后处理,识别出其表面缺 陷和定位。 二、实验原理 “机器视觉”是用机器代替人眼来进行识别、测量、判断等。机器视觉系统是通过摄像头将拍摄对象转换成图像信号,然后再交由图像分析系统进行分析、测量等。一个典型的机器视觉系统包括照明、镜头、相机、图像采集卡和视觉处理器5个部分。 HALCON是在世界范围内广泛使用的机器视觉软件,拥有满足各类机器视觉应用的完善开发库。HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件,具有良好的跨平台移植性和较快的执行速度。 本实验包括对被测工件进行尺寸测量和表面缺陷检测。尺寸测量是通过使用机器视觉来对考察对象的尺寸、形状等信息进行度量;缺陷检测是通过机器视觉手段来分析零部件信息,从而判断其是否存在缺陷。
机器视觉与图像处理实验报告
实验一:Matlab软件的使用 一、实验题目:Matlab软件的使用 二、实验内容:1.打开MATLAB软件,了解菜单栏、工具栏、状态栏、命令窗口等; 2.了解帮助文档help中演示内容demo有哪些; 3.找到工具箱类里面的Image Processing工具箱,并进行初步学习 三、实验步骤:打开Matlab软件,点击帮助,如图
实验二:图像的增强技术 一、实验题目:图像的增强技术 二、实验内容:1.了解图像增强技术/方法的原理; 2.利用matlab软件,以某一用途为例,实现图像的增强; 3.通过程序的调试,初步了解图像处理命令的使用方法。 三、实验步骤 truecolor = multibandread('https://www.360docs.net/doc/9e15488352.html,n', [512, 512, 7], 'uint8=>uint8', ... 128, 'bil', 'ieee-le', {'Band','Direct',[3 2 1]});The truecolor composite has very little contrast and the colors are unbalanced.figure imshow(truecolor); title('Truecolor Composite (Un-enhanced)') text(size(truecolor,2), size(truecolor,1) + 15,... 'Image courtesy of Space Imaging, LLC',... 'FontSize', 7, 'HorizontalAlignment', 'right') figure
计算机视觉第二次作业实验报告
厦门大学计算机视觉实验报告 摄像机标定 姓名:孙振强 学号:31520161153451 时间:2016.11.23
一、实验目的 学习使用OpenCV并利用OpenCV进行摄像机标定,编程实现,给出实验结果和分析。 二、实验原理 2.1摄像机标定的作用 在计算机视觉应用问题中,有时需要利用二位图像还原三维空间中的物体,从二维图像信息出发计算三维空间物体的几何信息的过程中,三维空间中某点的位置与二维图像中对应点之间的相互关系是由摄像机的几何模型决定的,这些几何模型的参数就是摄像机参数,而这些参数通常是未知的,摄像机标定实验的作用就是通过计算确定摄像机的几何、光学参数,摄像机相对于世界坐标系的方位。 2.2摄像机标定的基本原理 2.2.1摄像机成像模型 摄像机成像模型是摄像机标定的基础,确定了成像模型才能确定摄像机内外参数的个数和求解的方法。计算机视觉研究中,三维空间中的物体到像平面的投影关系即为成像模型,理想的投影成像模型是光学中的中心投影,也称为针孔模型。实际摄像系统由透镜和透镜组组成,可以由针孔模型近似模拟摄像机成像模型。 图2.1 针孔成像 2.2.2坐标变换 在实际摄像机的使用过程中,为方便计算人们常常设置多个坐标系,因此空间点的成像过程必然涉及到许多坐标系之间的相互转化,下面主要阐述几个重要坐标系之间的转换关系。
2.2.2.1世界坐标系--摄像机坐标系 图2.2 世界坐标系与摄像机坐标系空间关系 世界坐标系与摄像机坐标系之间的转换关系为: ????? ?????????????=????????????111w w w T c c c Z Y X O T R Z Y X R 和T 分别是从世界坐标系到摄像机坐标系的旋转变换和平移变换系数,反映的是世界坐标系和摄像机坐标系之间的关系,因此称为外参数。 2.2.2.2物理坐标系--像素坐标系 图2.3 像素坐标系