拉格朗日、欧拉和任意拉格朗日-欧拉描述的有限元分析
暨两岸船舶与海洋工程水动力学研讨会文集
拉格朗日、欧拉和任意拉格朗日-欧拉描述的
有限元分析
孙江龙1杨文玉2 杨侠3
(1 华中科技大学船舶与海洋工程学院,武汉 430074;2 华中科技大学机械科学与工程学院,武汉 430074;3 武
汉工程大学机电工程学院,武汉 430073)
摘要:对拉格朗日、欧拉和任意拉格朗日–欧拉三种描述方法进行了分析,为了便于理解给出了三种描述的参考构形和参考坐标系,在参考坐标系下根据物质导数的定义分别得到相应的速度和加速度,并进行比较,将三种描述方法的区别列于表中,清晰地阐述了三种描述之间的相互关系,并进行了有限元分析。
关键词:拉格朗日;欧拉;任意拉格朗日–欧拉;有限元法
1 引言
自由液面大晃动引起的强非线性往往给问题的求解造成很大困难,对大晃动问题进行数值模拟,要先解决描述方法的选择问题。过去通常采用欧拉法[1-3]和拉格朗日法[4-5]来描述非定常自由面流体流动,它们有着各自的优势和局限性。
采用固定网格的欧拉描述,整个计算过程中计算网格始终保持初始状态,从而可以描述流体质点运动的急剧变化,如碎波等现象。欧拉描述虽然可以有效地分析整个流场内部的运动,但很难精确跟踪流体的自由液面,即很难给出准确的自由面形状和位置。
在拉格朗日描述中,网格结点与流体质点在整个运动过程中始终保持重合,流体质点与网格结点之间不存在相对运动,因此很容易跟踪自由液面,适用于线性小晃动问题。这不仅大大地简化了控制方程地求解,而且还能有效地跟踪流体质点的运动轨迹,准确地描述波动的自由液面。但是,在涉及求解带自由面流体大幅运动时,此时的晃动已经具有很强的非线性特征,如果还采用拉格朗日描述,由于流体质点运动的急剧变化,将导致计算网格的扭曲,会面临网格奇异问题,从而使计算无法继续进行。
拉格朗日描述和欧拉描述虽有各自的优点,但也存在较大的缺陷,如果将它们有机地结合在一起,充分利用各自的优点并克服其缺点,则可以解决各自都难于解决的问题,任意拉格朗日–欧拉描述[6-7](ALE)方法就是基于该思路提出的。在任意拉格朗日–欧拉描述中,网格结点的运动方式比较灵活,网格结点可以跟随流体质点一起运动,也可以固定不变,甚至可以采用网格结点在一个方向上固定而在其他方向上随流体质点一起运动等方式。为了更加清晰地理解这三种描述方法,本研究从以下几个方面进行阐述和比较。
- 164 -
暨两岸船舶与海洋工程水动力学研讨会文集
- 165 -
2 坐标系
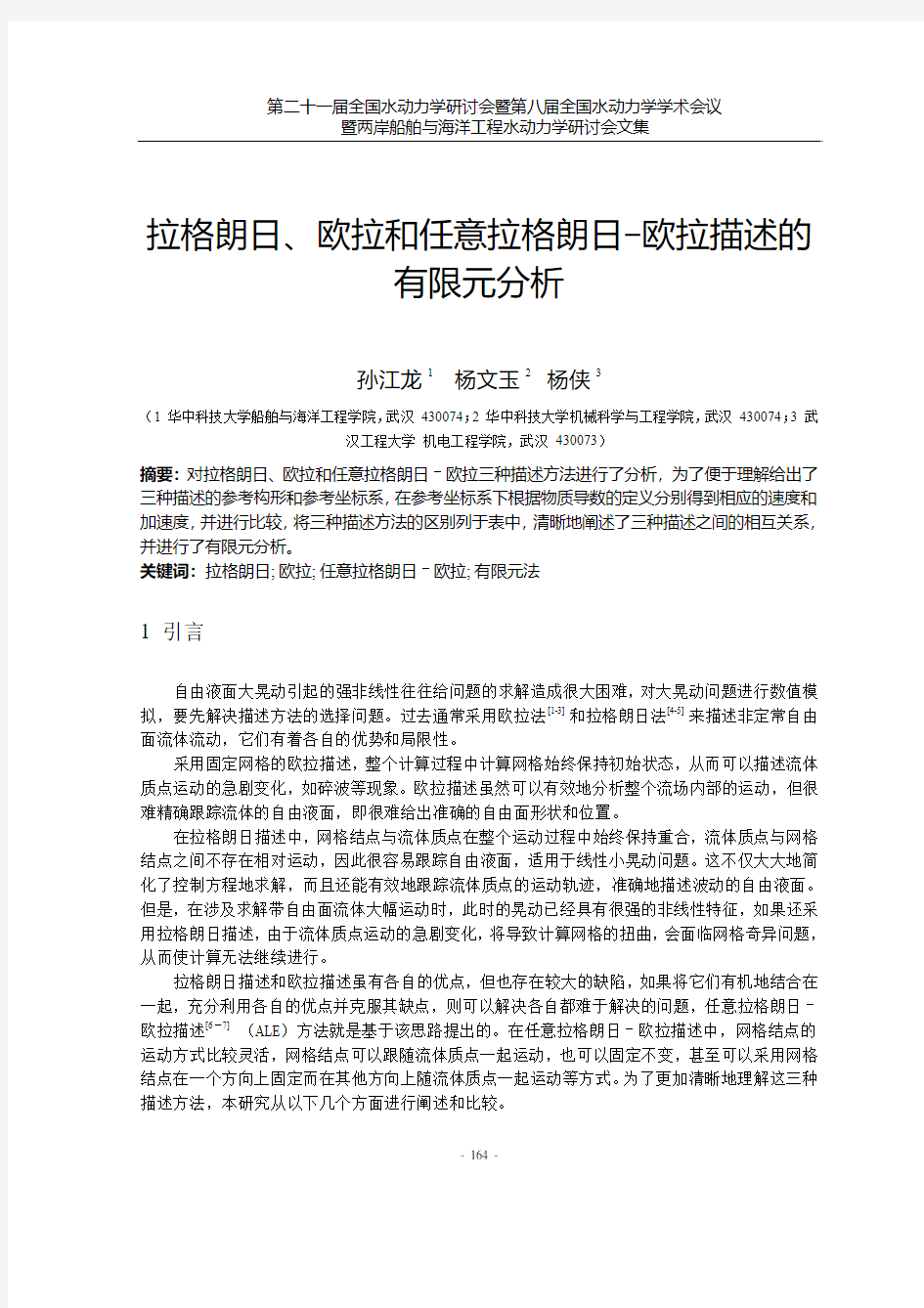
如图1所示,将连续介质在初始t 0时刻的形状称为初始构形,记为X
?v ,并引入拉格朗日坐标系(运动坐标系)123OX X X ,则在该参考系下物质点P 的位置矢量可表示为123(),,X X X X =v
,坐标(123),,i X i =称为物质坐标,表示物质点P 在物质坐标系中的初始位置。
将连续介质在现时t 时刻的形状称为现时构形,记为x ?v ,并引入欧拉坐标系(空间坐标系)ox x x 123,则在该参考系下,物质点P 位于p 处,其位置矢量可表示为),,(321x x x x =?,坐标
)3,2,1(=i x i 称为空间坐标,表示物质点P 在空间坐标系中的现时位置。
最后任意选择一个独立于初始构形和现时构形的任意构形,记为χ?v ,并引入任意拉格朗日-欧拉坐标系(任意坐标系)o χχχ123,则在该参考系下,物质点P 位于q 处,其位置矢量可表示为),,(321χχχχ=?
,坐标123(),,i i χ=称为任意坐标,表示物质点P 在任意坐标系中的现时位置。
图
1 参考坐标系
拉格朗日描述(简称为L 描述)是在初始构形X
?v 的基础上来研究物质点X v
在空间坐标系中的运动规律,其数学表达为(),X t x x =v v v ,描述了同一物质点X v 在空间坐标系中的位置矢量随时间的变化情况。
欧拉描述(简称为E 描述)是在现时构形x ?v 的基础上来研究空间点x ?处物质点的运动规律,其数学表达为(),X X x t =v v v ,描述了同一空间点x ?处物质点的各物理量随时间的变化情况。
任意拉格朗日-欧拉描述(简称为ALE 描述)则是在任意构形χ?v 的基础上来研究任意点χ?
在
暨两岸船舶与海洋工程水动力学研讨会文集
- 166 -
空间坐标系中的运动规律,其数学表达为()t x x ,χ???=,描述了同一任意点χ?
在空间坐标系中的
位置矢量随时间的变化情况。而另一数学表达式为(),X t χχ=v v v ,描述了同一物质点X v 在任意坐标
系中的位置矢量随时间的变化情况。
3 物质导数:速度和加速度
某一物质点X ?在空间坐标系中的运动速度u ?等于该物质点在空间坐标系中的位置矢量
),(t X x x ???=对时间t 的导数X t t X x u ??
????=/),(,式中的X ?表示物质点坐标X ?固定时的值。 某一物质点X ?在任意坐标系中的运动速度v ?等于该物质点在任意坐标系中的位置矢量
),(t X ???χχ=对时间t 的导数X t t X v ??
????=/),(χ,式中的X
?表示物质点坐标X ?固定时的值。 某一任意点χ?在空间坐标系中的运动速度w ?等于该任意点在空间坐标系中的位置矢量
),(t x x χ???=对时间t 的导数χχ????t t x w ??=/),(,式中的χ
?表示任意点坐标χ?固定时的值。 在物质点描述(L 描述)方法中,有限单元剖分是对整个运动流域进行剖分的,其网格点是随同流体质点一起运动的,网格点就是物质点。在空间点描述(E 描述)方法中,有限单元剖分是对整个固定流域进行剖分的,其网格点是固定在空间中不动的,网格点就是空间点。在任意点描述(ALE 描述)方法中,有限单元剖分是对整个任意流域进行剖分的,其网格点是独立于流体质点和空间点任意运动的,可以根据需要自由选择运动方式,网格点就是任意点。在ALE 描述中,由于网格点的运动规律可以是任意给定的,那么指定网格点特殊的运动规律就可以将ALE 描述退化为L 描述和E 描述。u w ?
?=,即网格点是随同物质点一起运动,此时退化为L 描述。0=w ?,即网格点是固定在空间中不动,此时退化为E 描述。0≠≠u w ??,即网格点是独立于流体质点和空间点随同任意点一起运动,此时对应于一般的ALE 描述。
各物理量的实质导数等于物理量的网格导数与物理量的迁移导数之和,实质导数为某一固定
物质点X ?的物理量对时间的变化率;网格导数为某一固定物质点X ?在网格点处的物理量对时间
的变化率;迁移导数为某一固定物质点X ?相对于网格点的速度(对流速度)和物理量对空间的
变化率(迁移加速度)的乘积。
在ALE 描述中任意构形是已知的,所以各物理量用物质点在任意坐标系中的位置矢量),(t X ???
χχ=来表示会比较方便,即用)),,((t t X f f ??χ=表示各物理量。则f 对t 的全导数(物
暨两岸船舶与海洋工程水动力学研讨会文集
- 167 -质导数)为/////X Df Dt f t
f t f t χ??????χ?χ?==+v v v v
g ,X ?表示物质点坐标X ?固定时的值,χ?表示任意点坐标χ?固定时的值。为了研究方便,下面引入求和法则,各物理量可用
)),,((t t X f f j ?χ=来表示,则可得/////j j j X Df Dt f t f t f t χ??????χ?χ?==+v g 。 那么对空间坐标系中的位置矢量)),,((t t X x j i ?χ求全导数后(即为物质点X ?在空间坐标系中
的运动速度i u )可得()(,),////j
i i j i i j j X u x X t t t x t x t χχχχ=??=??+????v v g ,整理后得//i i i j j u w x t χχ?=????g 。令i i i
c w u =?,则/i i j j c x v χ=??g ,i c 为物质点相对于网格点的运动
速度,称为对流速度。由式/i i j j c x v χ=??g 可得//j i j i t c x χχ??=??g ,通过整理后可得物质点X
?的任意物理量的物质导数///j i i X f t f t c f x χ??=??+??v g 。那么物质点X ?
在空间坐标系中运动速度)),,((t t X u j i ?χ的全导数(即为物质点X ?在空间坐标系中的加速度)为//j i i k i k a u t c u x χ=??+??g ,其中j t u i χ??/为网格导数,等于空间坐标系下物质点的运动速度i u 在网格点坐标j χ固定时对时间的偏导数;k c 为对流速度,等于空间坐标系下物质点的运动速度k u 与网格点的运动速度k w 之差。
在L 描述下(以运动坐标系为参考的,网格点就是物质点),网格导数j t u i χ??/就变为
X i t u ???/,等于空间坐标系下物质点的运动速度i u 对时间的全导数;对流速度k
c 就为0,网格点的运动速度k k u w =,有X
i i t u a ???=/。 在E 描述下(以空间坐标系为参考的,网格点就是空间点),网格导数j t u i χ??/就变为
j x i t
u ??/,等于空间坐标系下物质点的运动速度i u 对时间的偏导数;对流速度k c 就为k u ,网格点的运动速度0=k w ,有//j i i k i k x a u t u u x =??+??g 。
4 有限元分析
在进行流体的有限元分析时,如何对流体的不可压条件进行处理是非常关键的问题。处理的
方法有很多种,目前主要有泊松方程法[8]和分步法[9-10] 。前者的缺点是只能采用速度和压力的不
等阶插值,大大增加了计算量。而后者则利用不可压条件对NS 方程采用分步求解,将压力和速度变量分开后再进行方程的有限元离散,对速度和压力采用等阶插值,这样不仅实现方便,而且计算精度高。采用有限元法来建立粘性流体运动问题的有限元方程组的步骤如下:
1)选择描述方法,导出在该描述下的流体运动控制方程,包括连续性方程和运动方程。
2)采用直接法(直接从运动方程获得压力-泊松方程)或中间速度法[11](其中中间速度法又
暨两岸船舶与海洋工程水动力学研讨会文集
可分为两种:在NS方程中改变压力项来获得压力-泊松方程或在NS方程中略去压力项来获得压力-泊松方程)对运动方程进行时域上的差分离散和空间域上的有限元离散,建立不可压黏性流体运动问题的有限元方程组。
3)针对建立的有限元方程组,对边界条件(包括本质边界条件和自然边界条件)进行适当处理。
用ALE有限元法求解带自由面流动问题时,无需直接求解自由面运动方程,只要通过自由面上网格结点的运动来描述自由面变化。要使网格点始终能跟踪自由面,只需保证网格点在自由面边界法向上与流体质点保持相同的速度分量即可,而沿边界切向上的分量可以是任意的,本研究给出下面四种追踪自由面的方法[11],追踪法A:网格点沿某一个给定的方向运动;追踪法B:网格点沿自由面法向运动;追踪法C:网格点跟随自由面上流体质点一起运动;追踪法D:追踪法B和追踪法C的结合,即部分网格点沿自由面法向运动,而另一部分网格点跟随自由面上流体质点一起运动。
5 总结
本研究给出了如下有益结论,可为相关学者提供参考:(1)从参考构形、参考坐标系、有限元单元剖分、网格点、网格点的运动速度、对流速度和物质点在空间坐标系中的加速度等多个方面对三种描述方法进行了比较。(2)用有限元法来建立流体运动有限元方程组的一般步骤。(3)对边界条件进行适当处理中的四种追踪自由面的方法。
参考文献
1 A Kovacs, M Kawahara. A finite element scheme based on the velocity correction method for the solution of the time-dependent incompressible Navier-Stokes equations, Int j numer. methods fluids, 1991,13: 403–423.
2 G Ren, T Utnes. A finite element solution of the time-dependent incompressible Navier-Stokes equations using a modified velocity correction method, Int j numer. methods fluids,1993, 17: 349–364.
3 T Nakayama, M Mori. An Eulerian finite element method for time-dependent free surface problems in hydrodynamics, Int j numer. methods fluids,1996, 22: 175–194.
4 T Okamoto, M Kawahara. Two-dimensional sloshing analysis by Lagrangian finite element method, Int j numer. methods fluids, 1990,11: 453–477.
5 M Hayashi, K Hatanaka, M Kawahara. Lagrangian finite element method for free surface Naver-Stokes flow using fractional step methods, Int j numer. methods fluids, 1991,13: 805–840.
6 Ramaswamy B, Kawahara M. Arbitrary Lagrangian-Eulerian finite element method for unsteady, convective, incompressible viscous free surface fluid flow. International Journal for Numerical Methods in Fluid. 1987,7:1053–1075.
7 Hureta A, Liu W K. Viscous flow with large free surface motion. Comput Methods Appl Mech Engrg, 1988, 69:277–324.
- 168 -
暨两岸船舶与海洋工程水动力学研讨会文集
8王建军.快中子增值堆主容器流固耦合非线性数值分析[博士学位论文]. 北京,清华大学工程力学系,1998.
9 Codina R, Vazquez M, Zienkienwicz O C. A general algorithm for compressible and incompressible flows. Part III: the semi-implicit form. International Journal for Numerical Methods in Fluid. 1998,27:12–32.
10 Sung J, Choi H G, Yoo J Y. Time-accurate computation of unsteady free surface flows using an ALE-segregated equal-order FEM. Comput. Methods. Appl. Mech. Engrg.,2000, 190:1425–1440.
11孙江龙.绕潜艇三维厚边界层计算和二维自由面波动研究:[博士学位论文],武汉:华中科技大学交通科学与工程学院,2006.
Comparisons of the LAGRANGIAN, EULERIAN and arbitrary LAGRANGIAN-EULERIAN descriptions for finite element method
SUN Jiang-long1,YANG Wen-yu2 YANG Xia3
(1 School of Naval Architecture & Ocean Eng., Huazhong Univ. of Sci. & Tech, Wuhan 430074; 2 School of Mechanical Sci. & Eng., Huazhong Univ. of Sci. & Tech, Wuhan 430074;3 School of Mechanical & Electrical Eng.,Wuhan Institute of Technology,Wuhan, 430073)
Abstract:The Lagrangian, Eulerian and Arbitrary Lagrangian-Eulerian descriptions are discussed for finite element method in this paper. The corresponding reference frames are plotted together for our comprehending various descriptions. Material derivatives of tensors for velocity and acceleration are derived and compared with each other based on the definition of the material derivative. In order to distinguish and understand the existing descriptions more distinctly, comprehensive comparisons of the three kinds of descriptions are listed. At last, the finite element analysis is carried out.
Key words: Lagrangian, Eulerian, Arbitrary Lagrangian-Eulerian,Finite element method
- 169 -
研究性多面体欧拉定理的发现(一)
9.10研究性多面体欧拉定理的发现(一) 教学目的: 1.了解多面体与简单多面体的概念、发现欧拉公式. 2.培养学生发现问题、探究问题、归纳总结能力. 教学重点:欧拉公式的发现过程. 教学难点:欧拉定义及其证明. 授课类型:新授课. 课时安排:3课时. 教具:多媒体、实物投影仪. 内容分析: 本节为研究性课题.通过研究欧拉定理的发现过程,让学生了解欧拉公式及其简单应用,扩大学生的知识面,培养学生学习数学的兴趣. 教学过程: 一、复习引入: 1.欧拉生平事迹简说:欧拉(Euler),瑞士数学家及自然科学家.1707年4月15日出生于瑞士巴塞尔的一个牧师家庭,自幼受父亲的教育,13岁入读巴塞尔大学15岁大学毕业,16岁获硕士学位,1783年9月18日于俄国彼得堡去逝.(详细资料附后) 2.多面体的概念:由若干个多边形围成的空间图形叫多面体;每个多边形叫多面体的面,两个面的公共边叫多面体的棱,棱和棱的公共点叫多面体的顶点,连结不在同一面上的两个顶点的线段叫多面体的对角线.3.凸多面体:把多面体的任一个面展成平面,如果其余的面都位于这个平面的同一侧,这样的多面体叫凸多面体.如图的多面体则不是凸多面体. 4.凸多面体的分类:多面体至少有四个面,按照它的面数分别叫四面体、五面体、六面体等. 二、讲解新课: 1.简单多面体:考虑一个多面体,例如正六面体,假定它的面是用橡胶薄膜做成的,如果充以气体,那么它就会连续(不破裂)变形,最后可变为一个球面.如图:象这样,表面经过连续变形可变为球面的多面体,叫做简单多面体. 说明:棱柱、棱锥、正多面体等一切凸多面体都是简单多面体.
⑹ 发现:它们的顶点数V 、面数F 及棱数E 有共同的关 系式:2V F E +-=. 上述关系式对简单多面体都成立. 3.欧拉公式的探究 1.请查出图⑹的顶点数V 、面数F 、和棱数E ,并计算V +F -E =6+6-10=2 2.查出图⑺中的顶点数V 、面数F 、和棱数E ,并验证上面公式是否还成立? 3.假如图⑸→图⑻的多面体表面是像皮膜,向内充气则⑸⑹将变成一个球面,图⑺将变成两个紧贴的球面,图⑻将变成一个环面. 可以验证:只有像⑸⑹这样,经过连续变形,表面能变为一个球面的多面体才满足公式V +F -E =2.这个公式称为欧拉公式,这样的多面体称为简单多面体. 4.欧拉定理(欧拉公式):简单多面体的顶点数V 、面数F 及棱数E 有关系式: 2V F E +-=. 证明:(方法一 ) (10) D D ⑴如图⑽:将多面体的底面ABC DE 剪掉,抻成平面图形,其顶点、棱数,面数(剪掉面用右图中ABC DE 表示)均没有变,故所有面的内角总和不变. ⑵设左图中共有F 个面,分别是12,,,F n n n 边形,顶点数为V ,棱数为E,则122F n n n E +++=. 左图中,所有面的内角总和为 ?-++?-+?-180)2(180)2(180)2(21F n n n =?-+++180)2(21F n n n F =?-180)22(F E ()360E F =-? ⑶右图中,所有面的内角总和为 V 360V 2180V 2180()????下下上+(-)+(-)剪掉的底面内角和 =0V V 2360(2)360V ?=-上上(+-)
《图解刚体力学——欧拉运动学方程》
本科生毕业论文 论文题目:图解刚体力学——欧拉运动学方程 学生姓名:罗加宽 学号: 2008021152 专业名称:物理学 论文提交日期: 2012年05月17日 申请学位级别:理学学士 论文评审等级: 指导教师姓名:陈洛恩 职称:教授 工作单位:玉溪师范学院 学位授予单位:玉溪师范学院 玉溪师范学院理学院物理系 2012年05月
图解刚体力学—欧拉运动学方程 罗加宽 (玉溪师范学院理学院物理系 08级物理1班云南玉溪 653100) 指导教师:陈洛恩、杨春艳 摘要:本文阐述了描述刚体定点转动的欧拉角及欧拉运动学方程的图解,以期让复杂的问题转 化得简单清晰而易于学习者的理解,抽象的概念变得直观具体而易于学习者的掌握;并能在一 定程度上对提高学习者的空间思维能力、引导和培养学习者的创新思维能力有一定的帮助。 关键字:图解;刚体;欧拉角;欧拉运动学方程 1.引言 理论力学是研究物体机械运动一般规律的科学;依照牛顿的说法,理论力学“是关于力产生的运动和产生任何运动的力的理论,是精确的论述和证明” [1]。理论力学作为使用数学方法的自然知识的一部分,不仅研究实际物体,而且研究其模型—质点、质点系、刚体和连续介质。从研究次序来看,通常先研究描述机械运动现象的运动学,然后再进一步研究机械运动应当遵循哪些规律的动力学。至于研究平衡问题的静力学,对理科来讲可以作为动力学的一部分来处理,但在工程技术上,静力学却是十分的重要,因此,常把它和动力学分开,自成一个系统[2]。本文图解的内容为刚体力学运动学问题之一的刚体的绕定点的转动。 “图解”的方法,较早见于上海科学技术出版社1988年翻译出版的《图解量子力学》,原书名为The Picture Book of Quantum Mechanics,由Springer-Verlag 出版;类似的书还有Springer-Verlag出版的Visual Quantum Mechanics。其特点是通过将理论物理与数值计算相结合实现可视化来讲解物理知识。国外对物理的可视化教学十分重视,早在1995-1996年间Wiley出版社出版了9本有关物理多媒体教学的丛书,是由大学高等物理软件联盟(The Consortium for Upper-Level Physics Software,CUPS)编写该丛书及其所用的教学软件[3]。如今,图解法已经广泛应用于力学、电磁学、模拟电子技术等方面,理论力学方面同样也有不少人已经采用了图解法。如赵宗杰使用3dsmax建立质点外弹道运动规律的虚拟模型和场景[4];乐山师范学院王峰等利用Matlab分别对质点受力仅为位置、速度或时间的函数进行了图解,并说明了Matlab在理论力学中的应用[5];阜阳师范学院孙美娟、韩修林利用Mathematica进行编程作出了落体的位移—时间图像[6]。通过图解,使很多抽象繁难的物理问题在解析时达到空间立体直观,概念形成清晰,逻辑链路晓畅明朗,数式转换准确易见。 理论力学因理论性较强,与高等数学联系密切,一些概念的形成、公式的推导、逻辑推理等较抽象、繁难、复杂,往往使教授者感到教学很难达到预期的效果,学
第二章 用拉格朗日方程建立系统数学模型
第二章 用拉格朗日方程建立系统的数学模型 §2.1概述 拉格朗日方程——属于能量法,推导中使用标量,直接对整个系统建模 特点:列式简洁、考虑全面、建模容易、过程规范 适合于线性系统也适合于非线性系统,适合于保守系统,也适合于非保守系统。 §2.2拉格朗日方程 1. 哈密尔顿原理 系统总动能 ),,,,,,,(321321N n q q q q q q q q T T = (2-1) 系统总势能 ),,,,(321t q q q q U U N = (2-2) 非保守力的虚功 N N nc q Q q Q q Q W δδδδ ++=2211 (2-3) 哈密尔顿原理的数学描述: 0)(2 1 21 =+-??t t nc t t dt W dt U T δδ (2-4) 2. 拉格朗日方程: 拉格朗日方程的表达式: ),3,2,1()(N i Q q U q T q T dt d i i i i ==??+??-?? (2-5) (推导:) 将系统总动能、总势能和非保守力的虚功的表达式代入哈密尔顿原理式中(变分驻值原理),有 0)( 22112211221122112 1 =+++??-??-??-??++??+??+??+??+??? dt q Q q Q q Q q q T q q U q q U q q T q q T q q T q q T q q T q q T N N N N N N N N t t δδδδδδδδδδδδ (2-6) 利用分步积分
dt q q T dt d q q T dt q q T i t t i t t i i i t t i δδδ?? ??-??=??21212 1 )(][ (2-7) 并注意到端点不变分(端点变分为零) 0)()(21==t q t q i i δδ (2-8) 故 dt q q T dt d dt q q T i i t t i t t i δδ)(212 1 ??-=???? (2-9) 从而有 0)])([2 1 1 =+??-??+??- ?∑=dt q Q q U q T q T dt d i i i t t i i N i δ ( (2-10) 由变分学原理的基本引理: (设 n 维向量函数M(t),在区间],[0f t t 内处处连续,在],[0f t t 内具有二阶连续导 数,在f t t ,0处为零,并对任意选取的n 维向量函数)(t η,有 ? =f t t T dt t M t 0 0)()(η 则在整个区间],[0f t t 内,有 0)(≡t M ) 我们可以得到: 0)(=+??-??+??- i i i i Q q U q T q T dt d (2-11) 即 i i i i Q q U q T q T dt d =??+??-??)( (2-12) 对非保守系统,阻尼力是一种典型的非保守力,如果采用线性粘性阻尼模型, 则阻尼力与广义速度}{q 成正比,在这种情况下,可引入瑞利耗散(耗能)函数D , }]{[}{2 1 q C q D T ≡ (2-13) 阻尼力产生的广义非保守力为:
任意拉格朗日欧拉(ALE)理论基础
暨两岸船舶与海洋工程水动力学研讨会文集 拉格朗日、欧拉和任意拉格朗日-欧拉描述的 有限元分析 孙江龙1杨文玉2 杨侠3 (1 华中科技大学船舶与海洋工程学院,武汉 430074;2 华中科技大学机械科学与工程学院,武汉 430074;3 武 汉工程大学机电工程学院,武汉 430073) 摘要:对拉格朗日、欧拉和任意拉格朗日–欧拉三种描述方法进行了分析,为了便于理解给出了三种描述的参考构形和参考坐标系,在参考坐标系下根据物质导数的定义分别得到相应的速度和加速度,并进行比较,将三种描述方法的区别列于表中,清晰地阐述了三种描述之间的相互关系,并进行了有限元分析。 关键词:拉格朗日;欧拉;任意拉格朗日–欧拉;有限元法 1 引言 自由液面大晃动引起的强非线性往往给问题的求解造成很大困难,对大晃动问题进行数值模拟,要先解决描述方法的选择问题。过去通常采用欧拉法[1-3]和拉格朗日法[4-5]来描述非定常自由面流体流动,它们有着各自的优势和局限性。 采用固定网格的欧拉描述,整个计算过程中计算网格始终保持初始状态,从而可以描述流体质点运动的急剧变化,如碎波等现象。欧拉描述虽然可以有效地分析整个流场内部的运动,但很难精确跟踪流体的自由液面,即很难给出准确的自由面形状和位置。 在拉格朗日描述中,网格结点与流体质点在整个运动过程中始终保持重合,流体质点与网格结点之间不存在相对运动,因此很容易跟踪自由液面,适用于线性小晃动问题。这不仅大大地简化了控制方程地求解,而且还能有效地跟踪流体质点的运动轨迹,准确地描述波动的自由液面。但是,在涉及求解带自由面流体大幅运动时,此时的晃动已经具有很强的非线性特征,如果还采用拉格朗日描述,由于流体质点运动的急剧变化,将导致计算网格的扭曲,会面临网格奇异问题,从而使计算无法继续进行。 拉格朗日描述和欧拉描述虽有各自的优点,但也存在较大的缺陷,如果将它们有机地结合在一起,充分利用各自的优点并克服其缺点,则可以解决各自都难于解决的问题,任意拉格朗日–欧拉描述[6-7](ALE)方法就是基于该思路提出的。在任意拉格朗日–欧拉描述中,网格结点的运动方式比较灵活,网格结点可以跟随流体质点一起运动,也可以固定不变,甚至可以采用网格结点在一个方向上固定而在其他方向上随流体质点一起运动等方式。为了更加清晰地理解这三种描述方法,本研究从以下几个方面进行阐述和比较。 - 164 -
调和级数发散性地多种证明
调和级数发散性的证明方法 姓名:范璐婵 摘 要:本文给出了调和级数发散性的18种证明方法。其中前13种散见于各种资料,笔者进行了整理,有的采用与原证不同的叙述,比原证更具体明了;后5种是笔者用有关定理或方法导出的。 关键词:调和级数 发散性 部分和 收敛 Proofs of the divergency of harmonic series Name: Fan Luchan Director: Wang Yingqian Abstract : Eighteen methods to prove the divergency of harmonic series are presented in this paper.Some are known and some are new. Key words: harmonic series; divergency; partial sum; convergency 引言 调和级数1 1 n n ∞ =∑ 的发散性最早是由法国学者尼古拉奥雷姆(1323——1382)在极限概念被完全理解之前的400年证明的。他的方法很简单: 1111111 1 ++++++++L 注意后一个级数每一项对应的分数都不大于调和级数中相对应的项,而且后面级数的括号中的数值和都为 12,这样的1 2 有无穷多个,所以后一个级数是趋向无穷大的,进而调和级数也是发散的。 后来,大数学家约翰伯努利也作出了经典的证明。他的证明是以莱布尼茨的收 敛级数1111 12612(1) n n ++++ +=+L L 为基础的。以下是他的证明。
证明: 11122=- , 111623=- , 111 1234 =-L , 111(1)1n n n n =-++ L 所以 11111111 112233411 n s n n n =-+-+-++-=- ++L . 则 1 lim lim(1)11n n n s s n →∞→∞==-=+. 接着设 111 23A n =++++L L , 则 1234261220(1)n A n n = +++++++L L ; 111111261220(1) C n n = ++++++=+L L ; 11111161220(1)22D C n n = +++++=-=+L L ; 111111122030(1)63E D n n = +++++=-=+L L ; 111111203042(1)124 F E n n = +++++=-=+L L ; 111111304256(1)205G F n n = +++++=-=+L L ; L L 1234511 12612203023 C D E F G +++++=+++++=+++L L L . 即 1A A =+. 没有一个有限数会大于等于自己,即A 是无穷大,所以调和级数发散. 由上可知,伯努利是以一种“整体论”的态度来对待无穷级数的,他证明调和级数发散的方法与现代方法形成了鲜明的对比。伯努利作出这一论证之后的150年,才有真正的级数理论出现。他用简明的1A A =+来证明级数的无穷性,这是
对流体力学欧拉运动方程式的修正
第9节 对流体力学欧拉运动方程式的修正(探讨) 内容提要:本文是探讨性的论文。观念正确如否有待学界审视及实践的检验。流体力学的欧拉运动方程式有修正的必要吗?首先,欧拉运动方程式是在《场论》只具有散度和旋度的数学基础为背景的产物;其次,人们注意到,航天器在飞行运动中存在一未知的莫铭的力。这个莫铭的力应该是欧拉方程尚未虑及的因素造成的。作者在研究《超变函数论》过程中揭示了在三维向量场中除了散度、旋度外尚存在一个为目前所未知的副冲量度【见文献3】。 我们所提出的修正意见就是从这里切入的,即在考虑存在副冲量度这一因素后,欧拉运动方程式应该发生怎样的变化。 关键词:理想流体,时变加速度,位变加速度,欧拉运动方程式,副冲量度,冲量力,压扁的四维空间. 分类号: 一,现在的欧拉运动方程式[见文献4,第77页] 在理想流体场中取出一微小六面体流体微团。微团中心的压力为P ,速度为,,x y z ωωω。微团所受的力有表面力(压力)和体积力(质量力)。六面体各面所受的表面力如下图所示。体积力为,,x y z F F F 。设单位质量的的体积力为X,Y,Z ,则在x 轴方向微团所受的力为 ()()22 ()??+-+???=-?dx dx X dxdydz dydz dydz x x X dxdydz x P P ρP - P P ρ 在x 轴方向微团产生加速度的运动力为 x d dxdydz dt ωρ 【注:其中,总加速度 ???????=+++???????????=+++????y x x x z y x x z x y z d x y z dt t x t y t z t t x y z ωωωωωωωωωωωω 该式右侧第一项称为时变加速度;第二、三、四项总称为位变加速度。】
利用matlab软件求解常数e和欧拉常数γ
数学实验报告 利用matlab软件求解常数e和欧拉常数γ实验目的: 利用matlab软件计算常数e和γ,并尝试利用不同的算法计算,比较计算精度和时间,找到较好的算法。 掌握matlab程序求和、求极限的方法,学会寻找更优算法。 实验内容: 1、求e e可以来源于两个数列的极限和,即 en=lim(1+1/x)^x,(x->+∞)(1式) sn=1/0!+1/1!+1/2!+1/3!+1/4!+1/5!+……(2式), 根据1式,可在matlab上设计如下代码: for n=1:15 n=10^n; e=(1+1/n)^n %求常数e的循环语句 end format long %使结果显示16位双精度数 结果:
e的标准值约为:2.71828182845904523536 由上述结果可知,使用1式,有很大的缺陷,不仅精度连10^-7都没有,而且当n>=10^9误差开始变大。 根据2式,可得如下代码: sum=0; t=1; for n=1:18 t=n*t; sum=sum+(1/t); end %求常数e的循环语句 e=1+sum format long %使结果显示16位双精度数 结果:
e的标准值约为:2.71828182845904523536 如上所示,随着n的增大,e的计算值越来越接近e的真实值.但是,当n 的值大于17后,计算的精度不再提高,原因是双精度型数只能精确到16位,所以结果只有个位以及小数点后15位(最后一位是近似取的),而1/18!=1.56*10^-16,所以n超过18再往下计算不会更精确。。 在1式代码中,(1+1/n)和n都只能精确到小数点后16位,两者相乘,结果精度将只能精确到8位。在2式中,,每一项都能精确到小数点后16位,而e是所有项的和,求和后仍然能够精确到小数点后16位。所以,对于某些使用数学软件求解的问题,如果对精度有要求,应该尽量使用加、减运算,少用其他的运算(例如乘、除、乘方、对数等),这样可以提高运算精度。 2、求γ 如此欧拉常数γ也可以使用matlab求出较为精确的值。 可由公式γ=lim(n→∞)[(1+1/2+1/3+…+1/n )-ln(n)]得出。 for n=1:10 s=0; for i=1:10^n s=s+(1/i); end y=s-log(10^n) %求常数γ的循环语句 end
欧拉常数的证明
调和级数S=1+1/2+1/3+……是发散的,证明如下: 由于ln(1+1/n)<1/n (n=1,2,3,…) 于是调和级数的前n项部分和满足 Sn=1+1/2+1/3+…+1/n>ln(1+1)+ln(1+1/2)+ln(1+1/3)+…+ln(1+1/ n) =ln2+ln(3/2)+ln(4/3)+…+ln[(n+1)/n] =ln[2*3/2*4/3*…*(n+1)/n]=ln(n+1) 由于 lim Sn(n→∞)≥lim ln(n+1)(n→∞)=+∞ 所以Sn的极限不存在,调和级数发散。 但极限S=lim[1+1/2+1/3+…+1/n-ln(n)](n→∞)却存在,因为Sn=1+1/2+1/3+…+1/n-ln(n)>ln(1+1)+ln(1+1/2)+ln(1+1/3)+…+l n(1+1/n)-ln(n) =ln(n+1)-ln(n)=ln(1+1/n) 由于 lim Sn(n→∞)≥lim ln(1+1/n)(n→∞)=0 因此Sn有下界 而 Sn-S(n+1)=1+1/2+1/3+…+1/n-ln(n)-[1+1/2+1/3+…+1/(n+1)-ln( n+1)] =ln(n+1)-ln(n)-1/(n+1)=ln(1+1/n)-1/(n+1) 将ln(1+1/n)展开,取其前两项,由于舍弃的项之和大于0,故
ln(1+1/n)-1/(n+1)>1/n-1/(2n^2)-1/(n+1)=1/(n^2+n)-1/(2n^2)> 0 即ln(1+1/n)-1/(n+1)>0,所以Sn单调递减。由单调有界数列极限定理,可知Sn必有极限,因此 S=lim[1+1/2+1/3+…+1/n-ln(n)](n→∞)存在。 于是设这个数为γ,这个数就叫作欧拉常数,他的近似值约为 0.57721566490153286060651209,目前还不知道它是有理数还是无理数。在微积分学中,欧拉常数γ有许多应用,如求某些数列的极限,某些收敛数项级数的和等。例如求 lim[1/(n+1)+1/(n+2)+…+1/(n+n)](n→∞),可以这样做: lim[1/(n+1)+1/(n+2)+…+1/(n+n)](n→∞) =lim[1+1/2+1/3+…+1/(n+n)-ln(n+n)](n→∞) -lim[1+1/2+1/3+…+1/n-ln(n)](n→∞)+lim[ln(n+n)-ln(n)](n→∞)=γ-γ+ln2=ln2 欧拉常数发现的历史 著名数学家莱昂哈德·欧拉(1707-1783)该常数最先由瑞士数学家莱昂哈德·欧拉(Leonhard Euler)在1735年发表的文章 De Progressionibus harmonicus observationes 中定义。欧拉曾经使用C作为它的符号,并计算出了它的前6位小数。
牛顿—欧拉方程
牛顿-欧拉方程 欧拉方程(Euler equations),是欧拉运动定律的定量描述,欧拉运动定律是牛顿运动定律的延伸,在牛顿发表牛顿运动定律超过半个世纪后,于1750年,欧拉才成功的用欧拉方程表述了该定律: 该方程是建立在角动量定理的基础上的描述刚体的旋转运动时刚体所受外力矩与角加速度的关系式,大多时候可简写成: 其中,分别为刚体坐标系下三个轴的所受的外力矩,分别为刚体三个坐标轴的转动惯量(刚体坐标系下)。 欧拉方程通常与牛顿的平移运动方程被一起写出,称为牛顿-欧拉方程(Newton-Euler equations): 这里对牛顿的平移运动方程不赘述,只对欧拉方程进行讨论。 1.单质点角动量定理 质点旋转时,有动量定理: 对两边叉乘质点位置矢量:
观察: 因为: 故有: 定义角动量,可以看出为外力矩 故有单质点的角动量定理: 2.刚体的角动量定理 定义刚体的角动量为: 其中:下标G表示该向量为大地坐标系下的,的下标i表示该向量为大地坐标下各个质量元的向量。刚体旋转运动参考的惯性系是大地坐标系,不能把采用刚体的本身坐标系作为参考系,本身坐标系的提出只是方便我们某些量的分析与表述,如角速度、惯性张量。
(这里需要特别说明的是因为刚体质量分布不均匀的原因,角动量的方向往往不与刚体角速度方向一致,这也是无力矩进动的原因,即很多时候刚体角速度不守恒但刚体的角动量守恒了,宏观来看就是因为要保证角动量和动量守恒所以才要产生内力作用使角速度变化达到守恒的效果。) 由牛顿第三定律易知内力矩产生的角动量变化相抵,故有刚体的角动量定理: 其中:为外力矩 把上式展开有: 其中:称为惯性矩阵
高等数学公式(一元函数部分)
目 录 第一章 函数与极限 第一节 集合、映射与函数 第二节 数列的极限 第三节 函数的极限 第四节 无穷小与无穷大 第五节 连续性 第二章 导数与微分 第一节 导数及求导法则 第二节 高阶导数 第三节 微分 第三章 微分中值定理与导数的应用 第一节 微分中值定理 罗尔定理 拉格朗日中值定理 柯西中值定理 第二节 洛必达法则 第三节 泰勒公式 第四节 导数的应用 导数的应用一 曲线的切线和法线 导数的应用二 函数的单调性 导数的应用三 函数的极值和最值 导数的应用四 曲线的凹凸性和拐点 导数的应用五 曲线的渐近线 导数的应用六 曲线的曲率 第四章 不定积分 第一节 不定积分的概念与性质 原函数 不定积分 不定积分公式 第二节 不定积分的换元积分法 第一类换元法 (凑微分法) 第二类换元法 第三节 不定积分的分部积分法 第五章 定积分 第一节 定积分的概念与性质 第二节 微积分基本公式 第三节 定积分的换元法和分部积分法 第四节 反常积分 第六章 定积分的应用 第一节 定积分的几何应用 平面图形的面积 体积 旋转体的体积 弧长 旋转曲面的面积 第二节 定积分的物理应用 变力做功 抽水做功 水压力 索引 第一章 函数与极限 第一节 集合、映射与函数 邻域的概念 点0x 的δ邻域:000000(,){| }{|}(,)U x x x x x x x x x x δδδδδδ=-<=-<<+=-+
0x δ -0x δ +0 x x δ δ 几个重要的分段函数 绝对值函数 ,0 ,0x x y x x x ≥?==? -?? ===??-?=?-= ()1 f x =()1 f x =-(0)0 f =()sgn f x x =取整函数 []()f x x == 小于或等于x 的 最大整数 [x ] x n 1 n + []x 是x 左边的第一个整数(向左取整)。 []()f x x =是分段函数: [] ()f x x =
全欧拉法流固耦合问题
摘要 在这项工作中,我们提出一个关于流固耦合的一个完全欧拉结构(FSI)问题即耦合不可压缩Navier-Stokes超弹性固体方程。完全欧拉结构是一个单一变量结构耦合问题。与此相反的任意拉格朗日欧拉(ALE)坐标也是行之有效的,但是完全欧拉结构,包含两个子问题,液体和固体问题。在欧拉坐标,这个概念绕过与ALE各种困难坐标的联系,因为没有其他人的领域成果可以使用,所以该结构是一种首创全新的方法。本方法主要研究该固体的变形,它作为一种固体变形研究的的扩展,建立在初始点的设置,以此检测连接点的位置。由于涉及到大变形,所以本文尽可能的利用了像固体接触边界的变化或其他固体领域的研究。1介绍 我们为流固耦合问题提供了一种完全统一的可变有限单元法。重点强调于大变形结构领域的应用,处于流域和该流域边界接触的结构的自由运动,和其他自接触结构的应用。这项工作中出现的方程是Eulerian-Eulerian型的,并且这种奇特的方法第一次出现是由Dunne引入的[14,15]。 现在有数不清的不同方法来建模和模拟流固耦合问题。在这些方法中我们专注于单片模型,这种模型整个问题被描述为一种包含固体和流体表面的双系统。单片模型允许含糊的描述方案,大的时间步长并且提供使用基于错误假设的可能和最优化方法。他们已经很好的适用于大流体密度问题中如血液动力学。当流体问题被本质的描述为一种混合欧拉或朗格朗日的结构,材料的描述通常是固体问题的基础。所有的描述流固耦合问题的单片模型不管怎么样都要符合这两种结构。 在拉格朗日法或专一的拉格朗日法中,流体问题被定位于一种涉及域的匹配的位置。经典的方法是ALE法,见[29.4.35]或变空间域/稳态空间法(DSD/SST),见实例[53,51]。这些方程有相同之处,运动学和动力学结合很容易嵌入路径空间并有多种技术支持。拉格朗日法的缺点是流体问题的转化可在大变形或大的固体运动中破坏。 欧拉-拉格朗日法为解决流体问题使用一种欧拉混合计算单元,为解决固体 问题使用朗格朗日单元。通过使用力密度法结合这两种结构的应用于大边界[43]或大表面[39]。其它介绍的方法在于额外的表面不同。这些例子都是虚构的域法,其他最近的方法都是基于扩展有限单元法的。表面混合法的调查由Felippa[17] 给出。欧拉-拉格朗日法是一种表面捕捉的方法。这种表面不是修复的欧拉单元
对‘欧拉常数’γ的否定和对不可懂的e的新认定 (新完善版)
对‘欧拉常数’γ的否定和对不可懂的e的新认定(新完善版) (一) 数学天才欧拉先是搞出世所“公认”的‘自然对数的底数’e ,后又搞出受到质疑的‘欧拉常数’γ。 欧拉把‘欧拉常数’γ定义为:“调和级数Sn(n→∞)与自然对数函数 ln x(x→∞)的差值”,即“γ=S n(n→∞)- ln x(x→∞)=0.577…”,意图是为消除∞,以使S n免因∞而发散产生悖论。 所以要搞懂‘欧拉常数’γ,就要先搞懂“调和级数Sn(n→∞)”和“自然对数的函数 ln x(x→∞)”。 因历史的局限性,欧拉困于Sn因n→∞、1/n而发散(他不知1/n与1/○n的区别。请参看[3]),误以为搞出‘欧拉常数’γ就可使S n避开发散。其实n→∞其意已表达为n≠∞,即n<∞;无奈“实数”轴是无限性的直线,迫使他妄想用‘欧拉常数’γ=0.577…来避开∞,以致剪不断理还乱。 由[2]知,“调和级数”S n是假调和级数,真的应叫‘调和级数和’s○n,是收敛的(注意,‘级数和’与‘级数’是不同的)。 所以,接着还要搞清向来就很纠结的“自然对数的函数”y=ln x和“自然指数的函数”y=e^x 的真相(注意,‘自然’之本意即用了自然数n的编号○n): Ⅰ、由于‘级数’的自变量○n只能取存在性整数,而‘函数’的自变量x可取任意关系性小数, 且还有纵坐标y与横坐标x形成关系性的曲线(‘关系性小数’和‘存在性的整数’的区别,请参看[3])。所以是先有‘级数’才后有‘函数’(‘级数’与‘函数’的概念和图象的区别请看本文末〈注〉)。 所以要先从‘级数’类的‘自然对数’说起(注意,‘自然’之本意即用了自然数n的编号○n)。 Ⅱ、由于‘自然指数形式’级数是一个自变量○n有两种角色‘^○n’和‘/○n’的级数,并连 在一起,能产生‘自然幂数’;而其反形式‘自然对数形式’就拆成三个角色○n、‘^○n’和‘/○n’并分离在等号的两边,所以即便‘自然对数形式’级数其实也已被破坏而不成立。 由[2]知,由于历史性的局限,现行数学书中‘自然指数形式’n→∞(1+1/n)^n =2.718…, 现在要纠正为○n→○∞(1+1/○n)^○n=2.…才对(1与1的区别请看本文末〈注〉),而这应称为级数的‘自然指数形式’e^○n的‘求各级幂数式’(各级‘指数式’有各级‘幂数’);这‘2.…’ 是未知的幂数。未知的‘幂数’‘2.…’和未知的‘指数’○n只能用这‘求各级幂数式’求解。 所以,“自然对数形式”都被否定,不可使用;至于‘自然指数式’,依据[1],现行的“自然指数式”e^x也被否定,不可使用;只有本文的‘自然指数形式’的‘求各级幂数式’可用。 下面举例演示。例如求‘自然对数’⑤的‘真数’就须把⑤代入‘求各级幂数式’,查表得‘幂
欧拉的“上帝创造的公式”e^iπ+1=0被证实是假式子(完善版)
欧拉的“上帝创造的公式”e^iπ+1=0被证实是假式子(完善版) 陆道渊2019/1欧拉的e^iπ+1=0,至今被数学界赞叹为“上帝创造的公式”,其实竟是假式子。 应当说,欧拉这造假的初衷是为了消除调和级数悖论和逞能。但因他不知所用的数学基础“实数理论”是有缺陷的理论,从而不知调和级数有真假之分(请看[2])。 欧拉先是错误设想,如果两个数列都→∞,则它们之差可能是“常数”,如得到这“常数”,“就可使其→∞抵消,使两个数列有限化”;之后他知道找不到与“调和级数”s n 可相减的数列,就刻意做假了;于是欧拉把“调和级数”Sn(n→∞)与“自然对数函数”ln x(x→∞)的差值称为“欧拉常数”γ,为了求得幻想的γ而开始做假。欧拉用ln N 和e^n分别歪改成ln x和e^x ,其e=2.718…是假的,且本都没有图象(请看[4]的图4)。 但现行教材中无法埋灭e^n=(1+1/n)^n(lim n→∞)=2 , 2.25 , 2.37037037…,2.44140625…,…,2.718145927…,…; 和其底数e=(1+1/n)=2 ,1.5 ,1.3333…,1.25,1.2 ,1.66…,…,1.01 ,…,1.0001,…,1.00001,…。 可知e≠e^n ,即e≠2.718…,e是个由2始、以1为极限而缩小的变数。 欧拉为了求到幻想的“欧拉常数”γ,除了假e=2.718…外,还得造假图象、假式子和假运算(e^n已被歪改为e^x,而e^x没有图象;只有e^○n才有正确的图象,请看[4]的图3),各个方面都要做假(具体请看[4]、[5])。 于是欧拉接着先造假图象,于是辩说“e=2.718…是常数”(注意,e与π不一样,e 是变数),以与a混同,从而e^x可以冒用a^x函数图象了,而ln x可以冒用log a x 函数图象了(具体请看[4]的图1)。但ln x冒用log a x函数图象还远不够;怎办?于是欧拉就又引入反比例函数的1/x,而把“自然对数函数”的ln x说成是1/x的积分,于是就出现了y=1/x曲线图象,从而把假式子ln x在图上掩饰掉(具体请看[4]的图2),并在基本积分公式表中表达为∫(1/x)dx=ln x(注意,ln x是假式子的另一证法是,由于ln x是欧拉用ln N歪改而成,因而也证得lnx的x不是1/x的x,具体推证请看[5];
拉格朗日方程
拉格朗日方程 约瑟夫·拉格朗日(Joseph Louis Lagrange),法国数学家、物理学家。他在数学、力学和天文学三个学科领域中都有历史性的贡献,其中尤以数学方面的成就最为突出。 拉格朗日公式(lagrange formula)包括拉格朗日方程、拉格朗日插值公式、拉格朗日中值定理等。 中文名 拉格朗日公式 外文名 lagrange formula 涉及领域 信息科学、数学 发现者 约瑟夫·拉格朗日 发现者职业 法国数学家,物理学家 包括 拉格朗日方程等 目录 .1拉格朗日 .?生平 .?科学成就 .2拉格朗日方程
.?简介 .?应用 .3插值公式 .4中值定理 .?定律定义 .?验证推导 .?定理推广 拉格朗日 约瑟夫·拉格朗日(Joseph Louis Lagrange),法国数学家、物理学家。他在数学、力学和天文学三个学科领域中都有历史性的贡献,其中尤以数学方面的成就最为突出。 生平 拉格朗日1736年1月25日生于意大利西北部的都灵。父亲是法国陆军骑兵里的一名军官,后由于经商破产,家道中落。据拉格朗日本人回忆,如果幼年是家境富裕,他也就不会作数学研究了,因为父亲一心想把他培养成为一名律师。拉格朗日个人却对法律毫无兴趣。 到了青年时代,在数学家雷维里的教导下,拉格朗日喜爱上了几何学。17岁时,他读了英国天文学家哈雷的介绍牛顿微积分成就的短文《论分析方法的优点》后,感觉到“分析才是自己最热爱的学科”,从此他迷上了数学分析,开始专攻当时迅速发展的数学分析。 18岁时,拉格朗日用意大利语写了第一篇论文,是用牛顿二项式定理处理两函数乘积的高阶微商,他又将论文用拉丁语写出寄给了当时在柏林科学院任职的数学家欧拉。不久后,他获知这一成果早在半个世纪前就被莱布尼兹取得了。这个并不幸运的开端并未使拉格朗日灰心,相反,更坚定了他投身数学分析领域的信心。 1755年拉格朗日19岁时,在探讨数学难题“等周问题”的过程中,他以欧拉的思路和结果为依据,用纯分析的方法求变分极值。第一篇论文“极大和极小的方法研究”,发展了欧拉所开创的变分法,为变分法奠定了理论基础。变分法的创立,使拉格朗日在都灵声名大震,并使他在19岁时就当上了都灵皇家炮兵学校的教授,成为当时欧洲公认的第一流数学家。1756年,受欧拉的举荐,拉格朗日被任命为普鲁士科学院通讯院士。 1764年,法国科学院悬赏征文,要求用万有引力解释月球天平动问题,他的研究获奖。接着又成功地运用微分方程理论和近似解法研究了科学院提出的一个复杂的六体问题(木星的四个卫星的运动问题),为此又一次于1766年获奖。
欧拉运动微分方程各项的单位
第四章 1 欧 拉 运 动 微 分 方 程 d d u f t p =-?1 ζ 各 项 的 单 位 是: (1) 单 位 质 量 力 (2) 单 位 重 能 量 (3) 单 位 重 的 力 (4) 上 述 回 答 都 不 对 2. 欧 拉 运 动 微 分 方 程 在 每 点 的 数 学 描 述 是: (1)流入的质量流量等于流出的质量流量(2) 单 位 质 量 力 等 于 加 速 度 (3) 能 量 不 随 时 间 而 改 变 (4) 服 从 牛 顿 第 二 定 律 3. 欧 拉 运 动 微 分 方 程: (1) 适 用 于 不 可 压 缩 流 体, 不 适 用 于 可 压 缩 流 体 (2) 适 用 于 恒 定 流, 不 适 用 非 恒 定 流 (3) 适 用 于 无 涡 流, 不 适 用 于 有 涡 流 (4) 适 用 于 上 述 所 提 及 的 各 种 情 况 下 流 体 流 动 4. 水 流 一 定 方 向 应 该 是( ) (1) 从 高 处 向 低 处 流; (2) 从 压 强 大 处 向 压 强 小 处 流; (3) 从 流 速 大 的 地 方 向 流 速 小 的 地 方 流; (4) 从 单 位 重 量 流 体 机 械 能 高 的 地 方 向 低 的 地 方 流。 5. 理 想 流 体 流 经 管 道 突 然 放 大 断 面 时, 其 测 压 管 水 头 线( ) (1) 只 可 能 上 升; (2) 只 可 能 下 降; (3) 只 可 能 水 平; (4) 以 上 三 种 情 况 均 有 可 能。 6 在应用恒定总流的能量方程时,可选用图中的( ) 断 面, 作为计算断面。 (a )1,2,3,4,5 (b )1,3,5 (c )2,4 (d )2,3,4 1 122 3 3 4 4 5 5 7. 设有一恒定汇流,如图所示,Q Q Q 312=+, 根据总流伯努力方程式,则有( ) ()12221111 2 2222 2 3333 2 13 23 z p g V g z p g V g z p g V g h h w w + + ++ + =+ + ++--ραραρα ()()() 22211111 2 22222 2 ρραρραgQ z p g V g gQ z p g V g + + ++ + =++ + ++--ρραρρg Q Q z p g V g gQ h gQ h w w ()()123333 2 12213 23 (3) 上 述 两 式 均 不 成 立, 都 有 错 误;
欧拉方程
欧拉方程 (刚体运动) 莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。 静态的定义 三个欧拉角:() 。蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。绿色的线是交点线(N) 。 对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。参考系又称为实验室参考系,是静止不动的。而坐标系则固定于刚体,随着刚体的旋转而旋转。 参阅右图。设定 xyz-轴为参考系的参考轴。称 xy-平面与 XY-平面的相交为交点线,用英文字母(N)代表。zxz 顺规的欧拉角可以静态地这样定义: ?α是x-轴与交点线的夹角, ?β是z-轴与Z-轴的夹角, ?γ是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。科学家对此从未达成共识。每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。 实际上,有许多方法可以设定两个坐标系的相对取向。欧拉角方法只是其中的一种。此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。因此,使用欧拉角前,必须先做好明确的定义。 [编辑]角值范围 ?值从0 至2π弧度。 ?β值从0 至π弧度。 对应于每一个取向,设定的一组欧拉角都是独特唯一的;除了某些例外: ?两组欧拉角的α,一个是0 ,一个是2π,而β与γ分别相等,则此两组欧拉角都描述同样的取向。 ?两组欧拉角的γ,一个是0 ,一个是2π,而α与β分别相等,则此两组欧拉角都描述同样的取向。 [编辑]旋转矩阵 前面提到,设定刚体取向的旋转矩阵是由三个基本旋转矩阵合成的: 单独分开作用,每个矩阵各自代表绕着其转动轴的旋转;但是,当它们照次序相乘, ?最里面的(最右的) 矩阵代表绕着z 轴的旋转。 ?最外面的(最左的) 矩阵代表绕着Z 轴的旋转。 ?在中间的矩阵代表绕着交点线的旋转。 经过一番运算, 的逆矩阵是:
正项级数的根式判别法和比式判别法
重庆三峡学院毕业设计(论文) 题目:对正项级数敛散性判别法应用性的探讨 目录 摘要 ............................................................................................................................................................... I Abstract: ..................................................................................................................................................... I I 1 引言 . (3) 2正项级数相关概念 (3) 2.1 定义 (3) 2.2 正项级数敛散性判别的充要条件 (3) 2.3 三个重要比较级数 (4) 2.3.1 几何级数 (4) 2.3.2 调和级数 (5) 2.3.3 P-级数 (5) 3 正项级数敛散性判别法 (6) 3.1 判别发散的简单方法 (6) 3.2 比较判别法 (7) 3.2.1 定理及其推论 (7) 3.2.2 活用比较判别法 (9) 3.2.3 归纳总结 (11) 3.3 柯西判别法与达朗贝尔判别法 (12) 3.3.1 柯西判别法 (12) 3.3.2 达朗贝尔判别法 (13) 3.3.3 比值判别法和根值判别法失效的情况 (15) 3.4 拉贝判别法 (17)
3.5 积分判别法 (19) 3.6 两种新方法 (20) 3.7 判别正项级数敛散性方法的总结 (23) 4 在判别级数敛散性中的作用 (23) 4.1 证明负项级数的敛散性 (23) 4.2 证明变号级数绝对收敛 (24) 4.3 证明函数级数收敛 (25) 5 结束语 (26) 致谢 (27) 参考文献: (27)