欧拉-拉格朗日方程(教学知识)
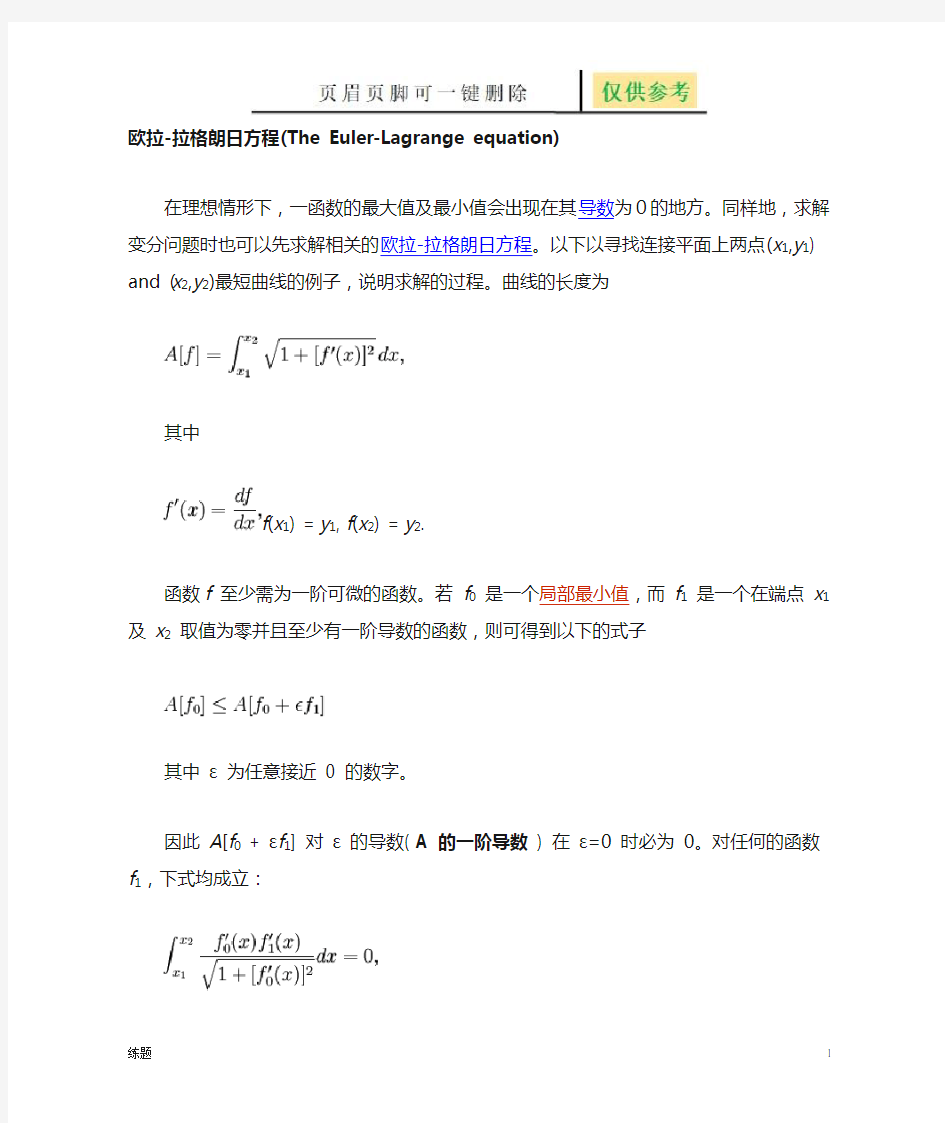
欧拉-拉格朗日方程(The Euler-Lagrange equation) 在理想情形下,一函数的最大值及最小值会出现在其导数为0的地方。同样地,求解变分问题时也可以先求解相关的欧拉-拉格朗日方程。以下以寻找连接平面上两点(x1,y1) and (x2,y2)最短曲线的例子,说明求解的过程。曲线的长度为
其中
f(x1) = y1, f(x2) = y2.
函数f至少需为一阶可微的函数。若f0是一个局部最小值,而f1是一个在端点x1及x2取值为零并且至少有一阶导数的函数,则可得到以下的式子
其中ε为任意接近 0 的数字。
因此A[f0+ εf1] 对ε的导数( A 的一阶导数 ) 在ε=0 时必为0。对任何的函数f1,下式均成立:
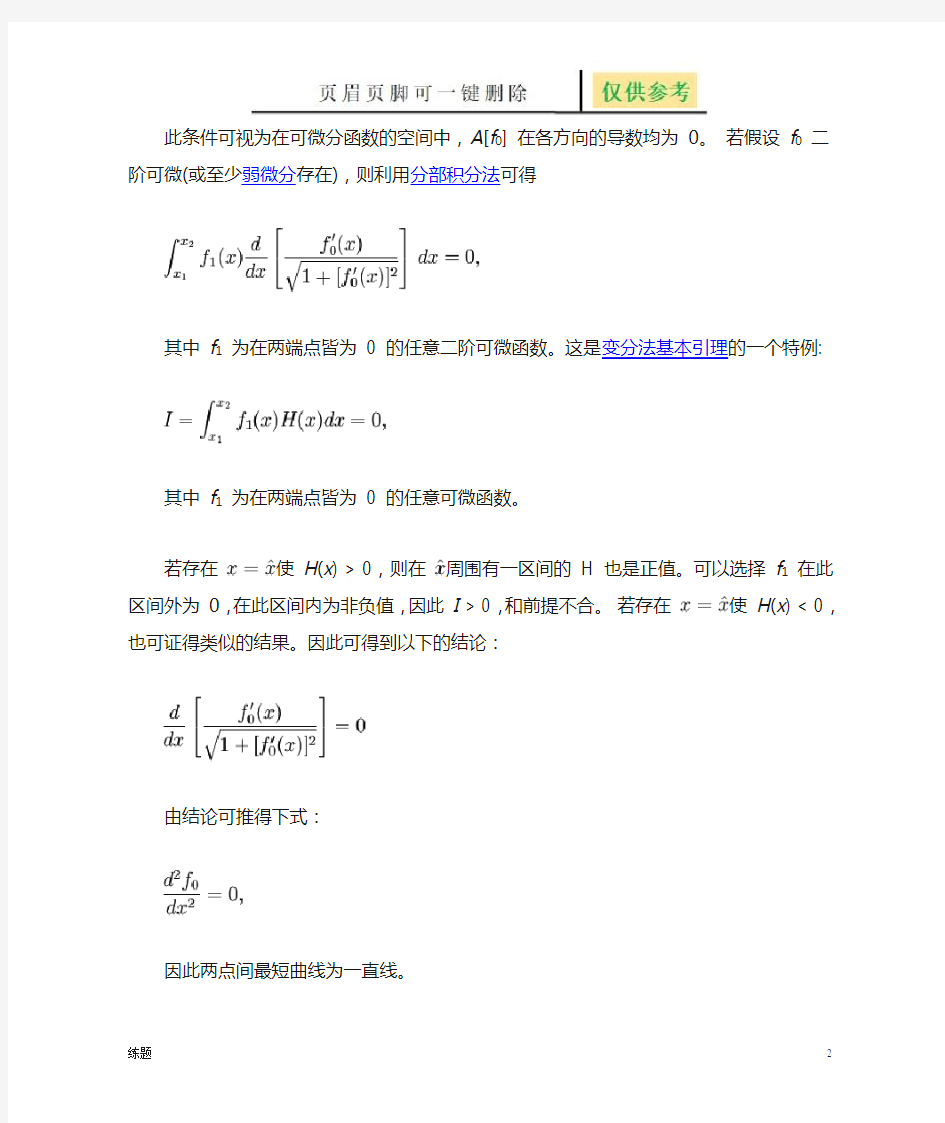
此条件可视为在可微分函数的空间中,A[f0] 在各方向的导数均为0。若假设f0二阶可微(或至少弱微分存在),则利用分部积分法可得
其中f1为在两端点皆为 0 的任意二阶可微函数。这是变分法基本引理的一个特例:
其中f1为在两端点皆为 0 的任意可微函数。
若存在使H(x) > 0,则在周围有一区间的 H 也是正值。可以选择f1在此区间外为 0,在此区间内为非负值,因此I > 0,和前提不合。若存在使H(x) < 0,也可证得类似的结果。因此可得到以下的结论:
由结论可推得下式:
因此两点间最短曲线为一直线。
在一般情形下,则需考虑以下的计算式
其中f需有二阶连续的导函数。在这种情形下,拉格朗日量L在极值f0处满足欧拉-拉格朗日方程
不过在此处,欧拉-拉格朗日方程只是有极值的必要条件,并不是充分条件。
《图解刚体力学——欧拉运动学方程》
本科生毕业论文 论文题目:图解刚体力学——欧拉运动学方程 学生姓名:罗加宽 学号: 2008021152 专业名称:物理学 论文提交日期: 2012年05月17日 申请学位级别:理学学士 论文评审等级: 指导教师姓名:陈洛恩 职称:教授 工作单位:玉溪师范学院 学位授予单位:玉溪师范学院 玉溪师范学院理学院物理系 2012年05月
图解刚体力学—欧拉运动学方程 罗加宽 (玉溪师范学院理学院物理系 08级物理1班云南玉溪 653100) 指导教师:陈洛恩、杨春艳 摘要:本文阐述了描述刚体定点转动的欧拉角及欧拉运动学方程的图解,以期让复杂的问题转 化得简单清晰而易于学习者的理解,抽象的概念变得直观具体而易于学习者的掌握;并能在一 定程度上对提高学习者的空间思维能力、引导和培养学习者的创新思维能力有一定的帮助。 关键字:图解;刚体;欧拉角;欧拉运动学方程 1.引言 理论力学是研究物体机械运动一般规律的科学;依照牛顿的说法,理论力学“是关于力产生的运动和产生任何运动的力的理论,是精确的论述和证明” [1]。理论力学作为使用数学方法的自然知识的一部分,不仅研究实际物体,而且研究其模型—质点、质点系、刚体和连续介质。从研究次序来看,通常先研究描述机械运动现象的运动学,然后再进一步研究机械运动应当遵循哪些规律的动力学。至于研究平衡问题的静力学,对理科来讲可以作为动力学的一部分来处理,但在工程技术上,静力学却是十分的重要,因此,常把它和动力学分开,自成一个系统[2]。本文图解的内容为刚体力学运动学问题之一的刚体的绕定点的转动。 “图解”的方法,较早见于上海科学技术出版社1988年翻译出版的《图解量子力学》,原书名为The Picture Book of Quantum Mechanics,由Springer-Verlag 出版;类似的书还有Springer-Verlag出版的Visual Quantum Mechanics。其特点是通过将理论物理与数值计算相结合实现可视化来讲解物理知识。国外对物理的可视化教学十分重视,早在1995-1996年间Wiley出版社出版了9本有关物理多媒体教学的丛书,是由大学高等物理软件联盟(The Consortium for Upper-Level Physics Software,CUPS)编写该丛书及其所用的教学软件[3]。如今,图解法已经广泛应用于力学、电磁学、模拟电子技术等方面,理论力学方面同样也有不少人已经采用了图解法。如赵宗杰使用3dsmax建立质点外弹道运动规律的虚拟模型和场景[4];乐山师范学院王峰等利用Matlab分别对质点受力仅为位置、速度或时间的函数进行了图解,并说明了Matlab在理论力学中的应用[5];阜阳师范学院孙美娟、韩修林利用Mathematica进行编程作出了落体的位移—时间图像[6]。通过图解,使很多抽象繁难的物理问题在解析时达到空间立体直观,概念形成清晰,逻辑链路晓畅明朗,数式转换准确易见。 理论力学因理论性较强,与高等数学联系密切,一些概念的形成、公式的推导、逻辑推理等较抽象、繁难、复杂,往往使教授者感到教学很难达到预期的效果,学
任意拉格朗日欧拉(ALE)理论基础
暨两岸船舶与海洋工程水动力学研讨会文集 拉格朗日、欧拉和任意拉格朗日-欧拉描述的 有限元分析 孙江龙1杨文玉2 杨侠3 (1 华中科技大学船舶与海洋工程学院,武汉 430074;2 华中科技大学机械科学与工程学院,武汉 430074;3 武 汉工程大学机电工程学院,武汉 430073) 摘要:对拉格朗日、欧拉和任意拉格朗日–欧拉三种描述方法进行了分析,为了便于理解给出了三种描述的参考构形和参考坐标系,在参考坐标系下根据物质导数的定义分别得到相应的速度和加速度,并进行比较,将三种描述方法的区别列于表中,清晰地阐述了三种描述之间的相互关系,并进行了有限元分析。 关键词:拉格朗日;欧拉;任意拉格朗日–欧拉;有限元法 1 引言 自由液面大晃动引起的强非线性往往给问题的求解造成很大困难,对大晃动问题进行数值模拟,要先解决描述方法的选择问题。过去通常采用欧拉法[1-3]和拉格朗日法[4-5]来描述非定常自由面流体流动,它们有着各自的优势和局限性。 采用固定网格的欧拉描述,整个计算过程中计算网格始终保持初始状态,从而可以描述流体质点运动的急剧变化,如碎波等现象。欧拉描述虽然可以有效地分析整个流场内部的运动,但很难精确跟踪流体的自由液面,即很难给出准确的自由面形状和位置。 在拉格朗日描述中,网格结点与流体质点在整个运动过程中始终保持重合,流体质点与网格结点之间不存在相对运动,因此很容易跟踪自由液面,适用于线性小晃动问题。这不仅大大地简化了控制方程地求解,而且还能有效地跟踪流体质点的运动轨迹,准确地描述波动的自由液面。但是,在涉及求解带自由面流体大幅运动时,此时的晃动已经具有很强的非线性特征,如果还采用拉格朗日描述,由于流体质点运动的急剧变化,将导致计算网格的扭曲,会面临网格奇异问题,从而使计算无法继续进行。 拉格朗日描述和欧拉描述虽有各自的优点,但也存在较大的缺陷,如果将它们有机地结合在一起,充分利用各自的优点并克服其缺点,则可以解决各自都难于解决的问题,任意拉格朗日–欧拉描述[6-7](ALE)方法就是基于该思路提出的。在任意拉格朗日–欧拉描述中,网格结点的运动方式比较灵活,网格结点可以跟随流体质点一起运动,也可以固定不变,甚至可以采用网格结点在一个方向上固定而在其他方向上随流体质点一起运动等方式。为了更加清晰地理解这三种描述方法,本研究从以下几个方面进行阐述和比较。 - 164 -
对流体力学欧拉运动方程式的修正
第9节 对流体力学欧拉运动方程式的修正(探讨) 内容提要:本文是探讨性的论文。观念正确如否有待学界审视及实践的检验。流体力学的欧拉运动方程式有修正的必要吗?首先,欧拉运动方程式是在《场论》只具有散度和旋度的数学基础为背景的产物;其次,人们注意到,航天器在飞行运动中存在一未知的莫铭的力。这个莫铭的力应该是欧拉方程尚未虑及的因素造成的。作者在研究《超变函数论》过程中揭示了在三维向量场中除了散度、旋度外尚存在一个为目前所未知的副冲量度【见文献3】。 我们所提出的修正意见就是从这里切入的,即在考虑存在副冲量度这一因素后,欧拉运动方程式应该发生怎样的变化。 关键词:理想流体,时变加速度,位变加速度,欧拉运动方程式,副冲量度,冲量力,压扁的四维空间. 分类号: 一,现在的欧拉运动方程式[见文献4,第77页] 在理想流体场中取出一微小六面体流体微团。微团中心的压力为P ,速度为,,x y z ωωω。微团所受的力有表面力(压力)和体积力(质量力)。六面体各面所受的表面力如下图所示。体积力为,,x y z F F F 。设单位质量的的体积力为X,Y,Z ,则在x 轴方向微团所受的力为 ()()22 ()??+-+???=-?dx dx X dxdydz dydz dydz x x X dxdydz x P P ρP - P P ρ 在x 轴方向微团产生加速度的运动力为 x d dxdydz dt ωρ 【注:其中,总加速度 ???????=+++???????????=+++????y x x x z y x x z x y z d x y z dt t x t y t z t t x y z ωωωωωωωωωωωω 该式右侧第一项称为时变加速度;第二、三、四项总称为位变加速度。】
牛顿—欧拉方程
牛顿-欧拉方程 欧拉方程(Euler equations),是欧拉运动定律的定量描述,欧拉运动定律是牛顿运动定律的延伸,在牛顿发表牛顿运动定律超过半个世纪后,于1750年,欧拉才成功的用欧拉方程表述了该定律: 该方程是建立在角动量定理的基础上的描述刚体的旋转运动时刚体所受外力矩与角加速度的关系式,大多时候可简写成: 其中,分别为刚体坐标系下三个轴的所受的外力矩,分别为刚体三个坐标轴的转动惯量(刚体坐标系下)。 欧拉方程通常与牛顿的平移运动方程被一起写出,称为牛顿-欧拉方程(Newton-Euler equations): 这里对牛顿的平移运动方程不赘述,只对欧拉方程进行讨论。 1.单质点角动量定理 质点旋转时,有动量定理: 对两边叉乘质点位置矢量:
观察: 因为: 故有: 定义角动量,可以看出为外力矩 故有单质点的角动量定理: 2.刚体的角动量定理 定义刚体的角动量为: 其中:下标G表示该向量为大地坐标系下的,的下标i表示该向量为大地坐标下各个质量元的向量。刚体旋转运动参考的惯性系是大地坐标系,不能把采用刚体的本身坐标系作为参考系,本身坐标系的提出只是方便我们某些量的分析与表述,如角速度、惯性张量。
(这里需要特别说明的是因为刚体质量分布不均匀的原因,角动量的方向往往不与刚体角速度方向一致,这也是无力矩进动的原因,即很多时候刚体角速度不守恒但刚体的角动量守恒了,宏观来看就是因为要保证角动量和动量守恒所以才要产生内力作用使角速度变化达到守恒的效果。) 由牛顿第三定律易知内力矩产生的角动量变化相抵,故有刚体的角动量定理: 其中:为外力矩 把上式展开有: 其中:称为惯性矩阵
流体运动描述方法(欧拉法和拉格朗日法)
在流体力学里,有两种描述流体运动的方法:欧拉(Euler)和拉格朗日(Lagrange)方法。欧拉法描述的是任何时刻流场中各种变量的分布,而拉格朗日法却是去追踪每个粒子从某一时刻起的运动轨迹。 在一个风和日丽的午后,YC坐在河岸边看河水流,恩,她总是很闲。如果YC的位置不动,她在自己目光能及的河面上划出一块区域,数某一时刻经过的船只数,如果可能的话,再数数经过的鱼儿数;当然,如果手头有些仪器,她可以干干正事,比如测测水流的速度、水的压力、水的温度等,由此得到每一时刻这一河流区域水流各物理量的分布。那么YC是在用欧拉方法研究流体。 这时,YC忽然看到一条船上坐着她的初恋情人,虽然根据陈安对初恋情人的定义,YC根本没有初恋情人。现在假设她有,天哪,他们有20年没见面了,他还欠她20元呢,不能放了他。于是YC记下第一眼看到初恋情人的时间,并迅速测出此时船的位置和速度,然后撒腿追去。假设这条船是顺水而下,船的速度即是水流的速度。每隔一个时间点,她便测一下船的速度和位置。为了曾经的爱情,还有那不计利息的20元,她越过山岗,淌过小溪,直到那条船离开了她的视线。于是,她得到了这条船在河流中的运动轨迹。YC此时所用的研究方法就是拉格朗日法。 Understood? 而在一些复杂的两相流动问题里,比如粒子在流场中运动的问题,我们关注的是粒子的运动轨迹,因此,我们可以用拉格朗日方法追踪粒子在流场中的运动,同时,用欧拉方法来计算流场的各物理量。 在许多工程领域,都有纤维在流场中运动的问题。如果将纤维在流场中的运动视为两相流动,必须为纤维作一些改变,因为它不同于一般的刚性粒子。它细长,细长到你无法用一个粒子来代表一根纤维;它柔,柔得自己的每一部分可以相对于其他部分发生变形。我在《柔性纤维的妖娆运动》里,为slender and flexible纤维建立了模型,把纤维离散成一个个粒子,并在粒子之间建立了弹性或粘弹性的连接。为了研究纤维在流场中运动的问题,我们首先用欧拉法来研究流场,通过求解Navier-Stokes方程,得到流场中每一时刻每一位置的各个物理量。根据这些物理量,我们算出每个纤维粒子在这一时刻这一位置流场中所受的流体动力(hydrodynamic force),则可以算出每个纤维粒子的运动。假设一根纤维离散为100个粒子,算出每个粒子的运动,将每一时刻这些粒子的位置连接起来,就回复成一根纤维的运动轨迹了。所以说,我们是用拉格朗日方法在追踪纤维的运动轨迹,同时还可以得到变形纤维的妖娆模样呢! 我在前一篇博文中说:“在某年某月某一天,两个毫无关系的人,走到了同一个学校、同一个班级,并从此没再分开。这其实是个很危险的旅程,如果一个人早一年,另一个人晚一年;又或许,如果一个人开始想去一个大学,却在最后改变了主意。这样,两个人就失去了相识的初始条件和边界条件,陪在他们身边的,就会是另外的人了。”你们看出来了吗?这里其实用的是拉格朗日方法,因为我是在追踪人的轨迹。如果我和他不能在某一时空同时出现,那么我和他就不可能相遇、相爱、结为夫妻,因为他的轨迹和我是不同的。但是,即使在1987年9月1日,我没有在中国纺织大学的纺织871班级里遇到他,那么我也可能遇见并爱上另一个男生,因为在这样一个时空区域里,总会有人出现。这就是欧拉方法,我不去追踪他,我只坐在我的时空里,静静等待属于我的那个人。 也就是说,获得爱情有两种方法。一种是拉格朗日法,你拼命去追踪你爱的人;另一种是欧拉法,你静静地坐在你的时空里,等待属于你的那个人。 那么,哪种方法更能获得幸福呢?
欧拉方程
泛函的欧拉方程(by zhengpin1390) (二)、泛函的欧拉方程 欧拉方程是泛函极值条件的微分表达式,求解泛函的欧拉方程,即可得到使泛函取极值的驻函数,将变分问题转化为微分问题。 (1)最简单的欧拉方程: 设函数F(x,y,y') 是三个变量的连续函数,且点(x,y)位于有界闭区域B 内,则对形如 的变分,若其满足以下条件: c) 在有界闭区域B内存在某条特定曲线y。(x) ,使泛函取极值,且此曲线具有二阶连续导数。 则函数y。(x) 满足微分方程: 上式即为泛函Q[y]的欧拉方程。 (2)含有自变函数高阶倒数的泛函的欧拉方程 一般来说,对于下述泛函: 在类似条件下,可以得到对应的欧拉方程为: (3)含有多个自变函数的泛函的欧拉方程
对于下述泛函: 其欧拉方程组为: (4)多元函数的泛函及其欧拉方程 此处仅考虑二元函数的情况,对如下所示多元函数的泛函: 其欧拉方程为: 泛函分析 泛函分析是研究拓扑线性空间到拓扑线性空间之间满足各种拓扑和 代数条件的映射的分支学科。它是20世纪30年代形成的。从变分法、微分方程、积分方程、函数论以及量子物理等的研究中发展起来的,它运用几何学、代数学的观点和方法研究分析学的课题,可看作无限维的分析学。 泛函分析的产生 十九世纪以来,数学的发展进入了一个新的阶段。这就是,由于对欧几里得第五公设的研究,引出了非欧几何这门新的学科;对于代数方程求解的一般思考,最后建立并发展了群论;对数学分析的研究又建立了集合论。这些新的理论都为用统一的观点把古典分析的基本概念和方法一般化准备了条件。
本世纪初,瑞典数学家弗列特荷姆和法国数学家阿达玛发表的著作中,出现了把分析学一般化的萌芽。随后,希尔伯特和海令哲来创了“希尔伯特空间”的研究。到了二十年代,在数学界已经逐渐形成了一般分析学,也就是泛函分析的基本概念。 由于分析学中许多新部门的形成,揭示出分析、代数、集合的许多概念和方法常常存在相似的地方。比如,代数方程求根和微分方程求解都可以应用逐次逼近法,并且解的存在和唯一性条件也极其相似。这种相似在积分方程论中表现得就更为突出了。泛函分析的产生正是和这种情况有关,有些乍看起来很不相干的东西,都存在着类似的地方。因此它启发人们从这些类似的东西中探寻一般的真正属于本质的东西。 非欧几何的确立拓广了人们对空间的认知,n维空间几何的产生允许我们把多变函数用几何学的语言解释成多维空间的影响。这样,就显示出了分析和几何之间的相似的地方,同时存在着把分析几何化的一种可能性。这种可能性要求把几何概念进一步推广,以至最后把欧氏空间扩充成无穷维数的空间。 这时候,函数概念被赋予了更为一般的意义,古典分析中的函数概念是指两个数集之间所建立的一种对应关系。现代数学的发展却是要求建立两个任意集合之间的某种对应关系。 这里我们先介绍一下算子的概念。算子也叫算符,在数学上,把无限维空间到无限维空间的变换叫做算子。
全欧拉法流固耦合问题
摘要 在这项工作中,我们提出一个关于流固耦合的一个完全欧拉结构(FSI)问题即耦合不可压缩Navier-Stokes超弹性固体方程。完全欧拉结构是一个单一变量结构耦合问题。与此相反的任意拉格朗日欧拉(ALE)坐标也是行之有效的,但是完全欧拉结构,包含两个子问题,液体和固体问题。在欧拉坐标,这个概念绕过与ALE各种困难坐标的联系,因为没有其他人的领域成果可以使用,所以该结构是一种首创全新的方法。本方法主要研究该固体的变形,它作为一种固体变形研究的的扩展,建立在初始点的设置,以此检测连接点的位置。由于涉及到大变形,所以本文尽可能的利用了像固体接触边界的变化或其他固体领域的研究。1介绍 我们为流固耦合问题提供了一种完全统一的可变有限单元法。重点强调于大变形结构领域的应用,处于流域和该流域边界接触的结构的自由运动,和其他自接触结构的应用。这项工作中出现的方程是Eulerian-Eulerian型的,并且这种奇特的方法第一次出现是由Dunne引入的[14,15]。 现在有数不清的不同方法来建模和模拟流固耦合问题。在这些方法中我们专注于单片模型,这种模型整个问题被描述为一种包含固体和流体表面的双系统。单片模型允许含糊的描述方案,大的时间步长并且提供使用基于错误假设的可能和最优化方法。他们已经很好的适用于大流体密度问题中如血液动力学。当流体问题被本质的描述为一种混合欧拉或朗格朗日的结构,材料的描述通常是固体问题的基础。所有的描述流固耦合问题的单片模型不管怎么样都要符合这两种结构。 在拉格朗日法或专一的拉格朗日法中,流体问题被定位于一种涉及域的匹配的位置。经典的方法是ALE法,见[29.4.35]或变空间域/稳态空间法(DSD/SST),见实例[53,51]。这些方程有相同之处,运动学和动力学结合很容易嵌入路径空间并有多种技术支持。拉格朗日法的缺点是流体问题的转化可在大变形或大的固体运动中破坏。 欧拉-拉格朗日法为解决流体问题使用一种欧拉混合计算单元,为解决固体 问题使用朗格朗日单元。通过使用力密度法结合这两种结构的应用于大边界[43]或大表面[39]。其它介绍的方法在于额外的表面不同。这些例子都是虚构的域法,其他最近的方法都是基于扩展有限单元法的。表面混合法的调查由Felippa[17] 给出。欧拉-拉格朗日法是一种表面捕捉的方法。这种表面不是修复的欧拉单元
拉格朗日方程
拉格朗日方程 约瑟夫·拉格朗日(Joseph Louis Lagrange),法国数学家、物理学家。他在数学、力学和天文学三个学科领域中都有历史性的贡献,其中尤以数学方面的成就最为突出。 拉格朗日公式(lagrange formula)包括拉格朗日方程、拉格朗日插值公式、拉格朗日中值定理等。 中文名 拉格朗日公式 外文名 lagrange formula 涉及领域 信息科学、数学 发现者 约瑟夫·拉格朗日 发现者职业 法国数学家,物理学家 包括 拉格朗日方程等 目录 .1拉格朗日 .?生平 .?科学成就 .2拉格朗日方程
.?简介 .?应用 .3插值公式 .4中值定理 .?定律定义 .?验证推导 .?定理推广 拉格朗日 约瑟夫·拉格朗日(Joseph Louis Lagrange),法国数学家、物理学家。他在数学、力学和天文学三个学科领域中都有历史性的贡献,其中尤以数学方面的成就最为突出。 生平 拉格朗日1736年1月25日生于意大利西北部的都灵。父亲是法国陆军骑兵里的一名军官,后由于经商破产,家道中落。据拉格朗日本人回忆,如果幼年是家境富裕,他也就不会作数学研究了,因为父亲一心想把他培养成为一名律师。拉格朗日个人却对法律毫无兴趣。 到了青年时代,在数学家雷维里的教导下,拉格朗日喜爱上了几何学。17岁时,他读了英国天文学家哈雷的介绍牛顿微积分成就的短文《论分析方法的优点》后,感觉到“分析才是自己最热爱的学科”,从此他迷上了数学分析,开始专攻当时迅速发展的数学分析。 18岁时,拉格朗日用意大利语写了第一篇论文,是用牛顿二项式定理处理两函数乘积的高阶微商,他又将论文用拉丁语写出寄给了当时在柏林科学院任职的数学家欧拉。不久后,他获知这一成果早在半个世纪前就被莱布尼兹取得了。这个并不幸运的开端并未使拉格朗日灰心,相反,更坚定了他投身数学分析领域的信心。 1755年拉格朗日19岁时,在探讨数学难题“等周问题”的过程中,他以欧拉的思路和结果为依据,用纯分析的方法求变分极值。第一篇论文“极大和极小的方法研究”,发展了欧拉所开创的变分法,为变分法奠定了理论基础。变分法的创立,使拉格朗日在都灵声名大震,并使他在19岁时就当上了都灵皇家炮兵学校的教授,成为当时欧洲公认的第一流数学家。1756年,受欧拉的举荐,拉格朗日被任命为普鲁士科学院通讯院士。 1764年,法国科学院悬赏征文,要求用万有引力解释月球天平动问题,他的研究获奖。接着又成功地运用微分方程理论和近似解法研究了科学院提出的一个复杂的六体问题(木星的四个卫星的运动问题),为此又一次于1766年获奖。
欧拉运动微分方程各项的单位
第四章 1 欧 拉 运 动 微 分 方 程 d d u f t p =-?1 ζ 各 项 的 单 位 是: (1) 单 位 质 量 力 (2) 单 位 重 能 量 (3) 单 位 重 的 力 (4) 上 述 回 答 都 不 对 2. 欧 拉 运 动 微 分 方 程 在 每 点 的 数 学 描 述 是: (1)流入的质量流量等于流出的质量流量(2) 单 位 质 量 力 等 于 加 速 度 (3) 能 量 不 随 时 间 而 改 变 (4) 服 从 牛 顿 第 二 定 律 3. 欧 拉 运 动 微 分 方 程: (1) 适 用 于 不 可 压 缩 流 体, 不 适 用 于 可 压 缩 流 体 (2) 适 用 于 恒 定 流, 不 适 用 非 恒 定 流 (3) 适 用 于 无 涡 流, 不 适 用 于 有 涡 流 (4) 适 用 于 上 述 所 提 及 的 各 种 情 况 下 流 体 流 动 4. 水 流 一 定 方 向 应 该 是( ) (1) 从 高 处 向 低 处 流; (2) 从 压 强 大 处 向 压 强 小 处 流; (3) 从 流 速 大 的 地 方 向 流 速 小 的 地 方 流; (4) 从 单 位 重 量 流 体 机 械 能 高 的 地 方 向 低 的 地 方 流。 5. 理 想 流 体 流 经 管 道 突 然 放 大 断 面 时, 其 测 压 管 水 头 线( ) (1) 只 可 能 上 升; (2) 只 可 能 下 降; (3) 只 可 能 水 平; (4) 以 上 三 种 情 况 均 有 可 能。 6 在应用恒定总流的能量方程时,可选用图中的( ) 断 面, 作为计算断面。 (a )1,2,3,4,5 (b )1,3,5 (c )2,4 (d )2,3,4 1 122 3 3 4 4 5 5 7. 设有一恒定汇流,如图所示,Q Q Q 312=+, 根据总流伯努力方程式,则有( ) ()12221111 2 2222 2 3333 2 13 23 z p g V g z p g V g z p g V g h h w w + + ++ + =+ + ++--ραραρα ()()() 22211111 2 22222 2 ρραρραgQ z p g V g gQ z p g V g + + ++ + =++ + ++--ρραρρg Q Q z p g V g gQ h gQ h w w ()()123333 2 12213 23 (3) 上 述 两 式 均 不 成 立, 都 有 错 误;
欧拉方程
欧拉方程 (刚体运动) 莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。 静态的定义 三个欧拉角:() 。蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。绿色的线是交点线(N) 。 对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。参考系又称为实验室参考系,是静止不动的。而坐标系则固定于刚体,随着刚体的旋转而旋转。 参阅右图。设定 xyz-轴为参考系的参考轴。称 xy-平面与 XY-平面的相交为交点线,用英文字母(N)代表。zxz 顺规的欧拉角可以静态地这样定义: ?α是x-轴与交点线的夹角, ?β是z-轴与Z-轴的夹角, ?γ是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。科学家对此从未达成共识。每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。 实际上,有许多方法可以设定两个坐标系的相对取向。欧拉角方法只是其中的一种。此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。因此,使用欧拉角前,必须先做好明确的定义。 [编辑]角值范围 ?值从0 至2π弧度。 ?β值从0 至π弧度。 对应于每一个取向,设定的一组欧拉角都是独特唯一的;除了某些例外: ?两组欧拉角的α,一个是0 ,一个是2π,而β与γ分别相等,则此两组欧拉角都描述同样的取向。 ?两组欧拉角的γ,一个是0 ,一个是2π,而α与β分别相等,则此两组欧拉角都描述同样的取向。 [编辑]旋转矩阵 前面提到,设定刚体取向的旋转矩阵是由三个基本旋转矩阵合成的: 单独分开作用,每个矩阵各自代表绕着其转动轴的旋转;但是,当它们照次序相乘, ?最里面的(最右的) 矩阵代表绕着z 轴的旋转。 ?最外面的(最左的) 矩阵代表绕着Z 轴的旋转。 ?在中间的矩阵代表绕着交点线的旋转。 经过一番运算, 的逆矩阵是:
牛顿—欧拉方程
牛顿-欧拉方程 欧拉方程(Eulerequations),是欧拉运动定律的定量描述,欧拉运动定律是牛顿运动定律的延伸,在牛顿发表牛顿运动定律超过半个世纪后,于1750年,欧拉才成功的用欧拉方程表述了该定律: 该方程是建立在角动量定理的基础上的描述刚体的旋转运动时刚体所受外力矩与角加速度的关系式,大多时候可简写成: 其中,分别为刚体坐标系下三个轴的所受的外力矩,分别为刚体三个坐标轴的转动惯量(刚体坐标系下)。 欧拉方程通常与牛顿的平移运动方程被一起写出,称为牛顿-欧拉方程(Newton-Euler equations): 这里对牛顿的平移运动方程不赘述,只对欧拉方程进行讨论。 1.单质点角动量定理 质点旋转时,有动量定理: 对两边叉乘质点位置矢量:
观察: 因为: 故有: 定义角动量,可以看出为外力矩 故有单质点的角动量定理: 2.刚体的角动量定理 定义刚体的角动量为: 其中:下标G表示该向量为大地坐标系下的,的下标i 表示该向量为大地坐标下各个质量元的向量。刚体旋转运动参考的惯性系是大地坐标系,不能把采用刚体的本身坐标系作为参考系,本身坐标系的提出只是方便我们某些量的分析与表述,如角速度、惯性张量。 (这里需要特别说明的是因为刚体质量分布不均匀的原因,角动量的方向往往不与刚体角速度方向一致,这也是无力矩进动的
原因,即很多时候刚体角速度不守恒但刚体的角动量守恒了,宏观来看就是因为要保证角动量和动量守恒所以才要产生内力作用使角速度变化达到守恒的效果。) 由牛顿第三定律易知内力矩产生的角动量变化相抵,故有刚体的角动量定理: 其中:为外力矩 把上式展开有: 其中:称为惯性矩阵 刚体旋转时,是变化的,但刚体在刚体坐标系下的惯性矩阵不会变,且容易分析得到:
5第3章拉格朗日方程
第3章拉格朗日方程 以动力学普遍方程为基础,拉格朗日导出了两种形式的动力学方程,分别称为第一类和第二类拉格朗日方程。将达朗贝尔原理与虚位移原理相结合,建立起动力学普遍方程,避免了理想约束力的出现;再把普遍方程变为广义坐标形式,进一步转变为能量形式,导出了第二类拉格朗日方程,实现了用最少数目的方程描述动力系统;应用数学分析中的乘子法,采用直角坐标形式的普遍方程和约束方程而建立的一组动力学方程,是第一类拉格朗日方程,便于程式化处理约束动力系统问题。拉格朗日方程是分析力学得以发展之源。 3.1 第二类拉格朗日方程 第二类拉格朗日方程是分析力学中最重要的动力学方程,它给出动力学问题一个普遍、简单而又统一的解法。拉格朗日方程只适用于完整约束的质点系。 3.1.1 几个关系式的推证 为方便起见,在推导拉格朗日方程前,先推证几个关系式。 质点系由n个质点、s个完整的理想约束组成,它的自由度数为k= 3n–s,广义坐标数与自由度数相等。该系统中,任一质点M i的矢径r i可表示成广义坐标q1,q2,…,q k和时间t的函数,即 r i=r i(q1,q2,…,q k,t) i=1,2,…,n 它的速度 (3-1) i=1,2,…,n 式中称为h个广义坐标的广义速度,分别为广义坐标和时间的函数,与广义速度没有直接的关系。式(3-1)对求偏导数,则有 (3-2) 这是推证的第一个关系式,它表明,任一质点的速度对广义速度的偏导数等于其矢径对广义坐标的偏导数。为推证第二个关系式,将式(3-1)对广义坐标q j求偏导数, 或 (3-3) 这是第二个关系式,它表明,任一质点的速度对广义坐标的偏导数等于
欧拉方程与纳维-斯托克斯方程
欧拉方程与纳维-斯托克斯方程 一发展历史 以克劳德-路易·纳维(Claude-Louis Navier)和乔治·加布里埃尔·斯托克斯命名,是一组描述象液体和空气这样的流体物质的方程。这些方程建立了流体的粒子动量的改变率(加速度)和作用在液体内部的压力的变化和耗散粘滞力(类似于摩擦力)以及重力之间的关系。这些粘滞力产生于分子的相互作用,能告诉我们液体有多粘。这样,纳维-斯托克斯方程描述作用于液体任意给定区域的力的动态平衡。他们是最有用的一组方程之一,因为它们描述了大量对学术和经济有用的现象的物理过程。它们可以用于模拟天气、洋流、管道中的水流、星系中恒星的运动、翼型周围的气流;它们也可以用于飞行器和车辆的设计、血液循环的研究、电站的设计、污染效应的分析等等。 纳维-斯托克斯方程依赖微分方程来描述流体的运动。这些方程,和代数方程不同,不寻求建立所研究的变量(譬如速度和压力)的关系,而是建立这些量的变化率或通量之间的关系。用数学术语来讲,这些变化率对应于变量的导数。这样,最简单情况的0粘滞度的理想流体的纳维-斯托克斯方程表明加速度(速度的导数,或者说变化率)是和内部压力的导数成正比的。这表示对于给定的物理问题的纳维-斯托克斯方程的解必须用微积分的帮助才能取得。 实际上,只有最简单的情况才能用上述方法解答,而它们的确切答案是已知的。这些情况通常涉及稳定态(流场不随时间变化)的非湍流,其中流体的粘滞系数很大或者其速度很小(小的雷诺数)。对于更复杂的情形,例如厄尔尼诺这样的全球性气象系统或机翼的升力,纳维-斯托克斯方程的解必须借助计算机。这本身是一个科学领域,称为计算流体力学。 虽然湍流是日常经验中就可以遇到的,但这类问题极难求解。一个$1,000,000的大奖由克雷数学学院于2000年5月设立,奖给对于能够帮助理解这一现象的数学理论作出实质性进展的任何人。 二表达式 1纳维-斯托克斯方程
欧拉运动微分方程各项的单位
欧拉运动微分方程各项的单位
————————————————————————————————作者: ————————————————————————————————日期: ?
第四章 1 欧 拉 运 动 微 分 方 程 d d u f t p =-?1 ζ 各 项 的 单 位 是: (1) 单 位 质 量 力 ? ?(2) 单 位 重 能 量 ?(3) 单 位 重 的 力 ? (4) 上 述 回 答 都 不 对 2. 欧 拉 运 动 微 分 方 程 在 每 点 的 数 学 描 述 是: (1)流入的质量流量等于流出的质量流量(2) 单 位 质 量 力 等 于 加 速 度 (3) 能 量 不 随 时 间 而 改 变?(4) 服 从 牛 顿 第 二 定 律? 3. 欧 拉 运 动 微 分 方 程: (1) 适 用 于 不 可 压 缩 流 体, 不 适 用 于 可 压 缩 流 体? (2) 适 用 于 恒 定 流, 不 适 用 非 恒 定 流? (3) 适 用 于 无 涡 流, 不 适 用 于 有 涡 流? (4) 适 用 于 上 述 所 提 及 的 各 种 情 况 下 流 体 流 动 4. 水 流 一 定 方 向 应 该 是( ) (1) 从 高 处 向 低 处 流; (2) 从 压 强 大 处 向 压 强 小 处 流; (3) 从 流 速 大 的 地 方 向 流 速 小 的 地 方 流; (4) 从 单 位 重 量 流 体 机 械 能 高 的 地 方 向 低 的 地 方 流。 5. 理 想 流 体 流 经 管 道 突 然 放 大 断 面 时, 其 测 压 管 水 头 线( ) (1) 只 可 能 上 升; ??(2) 只 可 能 下 降; (3) 只 可 能 水 平;? (4) 以 上 三 种 情 况 均 有 可 能。 6 在应用恒定总流的能量方程时,可选用图中的( ) 断 面, 作为计算断面。 (a)1,2,3,4,5?(b )1,3,5 (c )2,4?(d )2,3,4 1 122 3 3 4 4 5 5 7. 设有一恒定汇流,如图所示,Q Q Q 312=+, 根据总流伯努力方程式,则有(?) ()12221111 2 2222 2 3333 2 13 23 z p g V g z p g V g z p g V g h h w w + + ++ + =+ + ++--ραραρα
拉格朗日方程的应用及举例08讲
1 拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:(1)拉格朗日方程适用于完整系统,可以获得数目最少的运动微分方程,即可以建立与自由度数目相同的n 个方程,是一个包含n 个二阶常微分方程组,方程组的阶数为2n 。求解这个方程组可得到以广义坐标描述的系统运动方程。(2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取而变化。特别是解题时有径直的程序可循,应用方便。(3)所有的理想约束的约束反力均不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。(4)拉格朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用的广义力,避开了力、速度、加速度等矢量的复杂运算。(5)拉格朗日方程不但可以建立相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时,应首先建立以广义坐标q 和广义速度q 表示的动能函数和广义力Q 。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉格朗日方程的应用。 一、动能的计算 对于系统的动能,可以写出关于广义速度q 的齐次函数的表达式。在实际计算中,应用理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m ,半径为r 的均质圆盘D ,沿OAB 直角曲杆的AB 段只滚不滑。圆盘的盘面和曲杆均放置在水平面上。已知曲杆以匀角速度ω1绕通过O 点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x 和?,x 为圆盘与曲杆接触点到曲杆A 点的距离,?为曲杆OAB 的转角,? = ω1t 。 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心C 的速度和相对于质心平动坐标
分数阶变分问题的欧拉–拉格朗日方程
本科毕业论文 外文文献及译文 文献、资料题目: Formulation of Euler–Lagrange equations for fractional variational problems 文献、资料来源:爱思唯尔期刊 文献、资料发表(出版)日期:2001.7.27
外文文献: Formulation of Euler–Lagrange equations for fractional variational problems 1. Introduction The field of calculus of variations is of significant importance in various disciplines such as science, engineering, and pure and applied mathematics. Reference [7] presents a Bliss-type multiplier rule for constrained variational problems with delay. Calculus of variations has been the starting point for various approximate numerical schemes such as Ritz, finite difference, and finite element methods (see [2,8]). Functional minimization problems naturally occur in engineering and science where minimization of functionals, such as, Lagrangian, strain, potential, and total energy, etc. give the laws governing the systems behavior. In optimal control theory, minimization of certain functionals give control functions for optimum performance of the system. Although many laws of the nature can be obtained using certain functionals and the theory of calculus of variations, not all laws can be obtained this way. For example, almost all systems contain internal damping, yet the traditional energy based approach cannot be used to obtain equations describing the behavior of a nonconservative system (see [9,10]). Recently, Refs. [9,10] presented a new approach to mechanics that allows one to obtain the equations for a nonconservative system using certain functionals. In these references, fractional derivative terms were introduced in functionals to obtain nonconservative terms in the desired differential equations. Fractional derivatives, or more precisely derivatives of arbitrary orders, have played a significant role in engineering, science, and pure and applied mathematics in recent years. As [11] point out, there is hardly a field or science or engineering that has remained untouched by this field. Reference [12] provide an encyclopedic treatment of this subject. Additional background, survey, and application of this field in science, engineering, and mathematics can be found, among others, in [11–17]. Recent investigations have shown that many physical systems can be represented more accurately using fractional derivative formulations. Given this, one can imagine obtaining these
欧拉静平衡方程
欧拉静平衡方程 为了进一步研究流体静平衡规律和流体内部静压强分布规律,我们先运用牛顿第二定 律建立流体静平衡方程. 图 2-3 从静止流体中取一微小六面体,其表面与坐标平面平行,边长分别为dx dy dz 、、(参见图2—3). 从上一节的讨论中知道,作用在流体上的力有质量力和表面力. 对于所取的微元体,作用在其上的质量力为s dF R dxdydz ρ=,其中dxdydZ ρ是微元体的质量. 在静止流体中,不存在切向力,表面力中仅有压力. 由于流体中各处的压强不同,即压强是空间坐标的函数,(,,)p p x y z =. 因而作用在微元体各个面上的压力不同,其合力可由六个面上的压力按向量相加而得. 设微元体中心C 点(,,)x y z 的压强为p ,则微元体六个面上的压强可用泰勒级数将压强在C 点展开而得,例如,微元体左面的压强为 ()2 L L x P dy p p y y p y y ??=+ -=-?? 展开时略去了二阶以上微量,因为取极限时,这些项将趋于零. 同样,微元体右面的压强为 ()2 R R p p dy p p y y p y y ??=+ -=+?? 图2—3 上表示了y 方向两个面上的压力作用. 每个力是三项的乘积,第一项是压强的大小,第二项是表面积,第三项是单位坐标向量,图上也表明了每个力都指向作用面. 用同样方法 可以写出其它面上的作用力. 这些表面力的合力为 ()()()()()()22 s p dx p dx d F p dxdy i p dydz i x x ??=- ++-??
()()()()()()22 p dy p y p dzdx j p dzdx j y y ???+- ++-?? ()()()()()()22 p dz p dz p dxdy k p dxdy k z z ??+-++-?? 化简后为 ( )S p p p dF i j k dxdydz x y z ???=-++??? (a ) 括号中的项称为压强梯度,并写作gradp 或p ?. 在直角坐标系中 ()()p p p gradp p i j k i j k p x y z x y z ?????? ≡?≡++≡++?????? (2—4) 梯度grad 或?可看作是一个向量运算符:对标量取梯度后得到向量. 采用梯度符号后,式(a )可写成 ()S dF p dxdydz =-? 从而 S dF p dxdydz ?=- 上式表明,压强梯度是单位体积流体所受表面力的负值. 组合表面力和质量力,可以得到作用在微元体上的总作用力为 ()B S dF dF dF pR p dxdydz =+=-? 在静止流体中,流体加速度为零. 于是,根据牛顿第二定律,作用在微元体上的作用力应平衡,即 0dF = 于是得到 0p R p -?= (2—5) 从式(2—5)的导出过程可以看出其中各项的物理意义,第一项是单位体积流体所受的质量力,第二项是单位体积流体所受的表面力. 将式(2—5)投影到各坐标轴,可得三个标量方程 000 p pX x p pY y p pZ z ?- =??-=??-=? (2—6) 式(2—5)和式(2—6)是由欧拉在1775年首先导出的,因此通常称它为欧拉静平衡方程.