四轮转向

简析汽车四轮转向系统
摘要:本文介绍了汽车四轮转向系统(4WS )的分类,主要构造,工作原理,分析了它的工作特性并阐述了其转向角比例控制原理,还对四轮转向与前轮转向(2WS )进行了对比,分析了它的优点,并对它的未来发展做出了展望。
1 概述
目前的轿车转向分为前轮转向(2WS )和四轮转向(4WS ),前者普遍使用,而后者则是一种新技术,主要应用于中高级车上。
所谓四轮转向,是指后轮和前轮相似,也具有一定的转向功能,不仅可以与前轮同向旋转,也可以与前轮反向旋转。其主要目的是增强汽车在高速行驶或侧向风力作用下的操纵稳定性,改善低速行驶时的操纵轻便性,便于汽车高速行驶时急转弯和由一个车道向另一个车道移动调整,减少调头时的转弯半径,以及在极狭窄的位置“平移”进入车位停泊。四轮转向系统,对于底盘较长,且经常需要在窄小地方行驶时的汽车有着明显的作用。
按照前后轮的偏转角和车速之间的关系,4WS 可分为转角传感型和车速传感型;按照控制和驱动后轮转向机构的方式,可分为机械式、液压式、电控机械式、电控液压式和电控电动式等。
2 四轮转向的基本原理
2.1低速时的转向特征
2.1.1理论准备
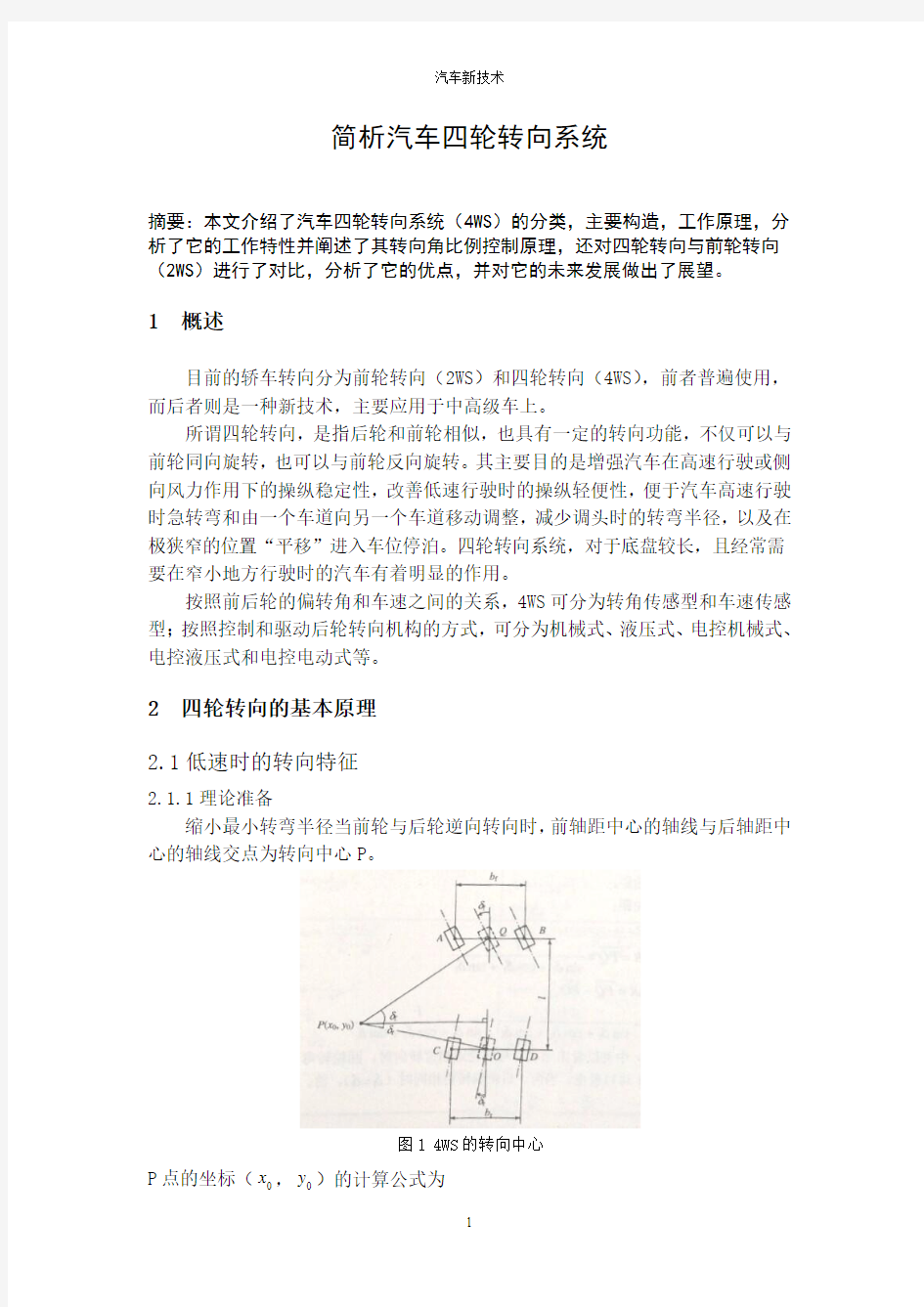
缩小最小转弯半径当前轮与后轮逆向转向时,前轴距中心的轴线与后轴距中心的轴线交点为转向中心P 。
图1 4WS 的转向中心
P 点的坐标(0x ,0y )的计算公式为
r
f l
x δδtan tan 0+=
(2.1)
r
f l
l l y δδδtan tan tan 0+??
= (2.2)
如果前外轮的转弯半径为R ,前后外侧车轮之间的转弯半径差值为R ?,则
BP R =
222020)tan tan tan ()tan tan 2
(
)()2
(
r
f f r f f f l l
b y l x b δδδδδ+?+++
?-++= (2.3)
CP AP R -=?
2
0202020)2
(
)()2
(y x b y l x b r f ++--++-
=
(2.4) 22)tan tan tan ()tan tan 2(r f f r f f
l l b δδδδδ+?+++-=22
)tan tan tan ()tan tan 2(r
f f r f r l l b δδδδδ+?+++--
式中f δ——前轮的偏转角(左、右两前轮偏转角的平均值); r δ——后轮的偏转角(左、右两前轮偏转角的平均值); f b ——前轮距; r b ——后轮距; l ——轴距。 f
f f l
PQ R δδδtan cos sin ++=
= (2.5)
PO PQ R -=?
f f f l
δδδtan cos sin ++=r
r r l δδδtan cos sin ++- (2.6)
从式(2.5)中可以看出当后轮与前轮逆相位转向时,四轮转弯半径比两轮转弯半径小。从式(2.6)中可以看出,当前、后轮偏转角相同时(f δ=r δ),前、后轮的转弯半径差值可能为0。从下图可以直观看出转向半径的大小。 2.1.2 2WS 与4WS 的比较
图2 低速时2WS与4WS的比较
如上图所示为低速转向行驶轨迹,2WS汽车的情况是后轮不转向,所以转向中心大致在后轴的延长线上。4WS汽车的情况是对后轮进行逆向操纵,转向中心比2WS汽车靠近车体处。在低速转向时,若两前轮转角相同,则4WS汽车的转向半径更小,内轮差也小,转向性能好。对于小轿车而言,如果后轮逆向转向5°,则可减少最小转弯半径50cm,内轮差约10cm。
2.2.中高速四轮转向特征
2.2.1 2WS转向特性
直线行驶的汽车转向是下面两种
运动的合成运动:汽车质心绕转向中
心的公转和汽车绕质心的自转。如左
图2WS汽车中高速时车辆的运动状态:
前轮转向时,前轮产生侧偏角α,并
产生旋转向心力使车体开始自转,此
时后轮产生侧偏角β和旋转向心力,车
速越高,离心力越大,所以必须给前
轮更大的侧偏角,使它产生更大的旋
转向心力,与此同时,后轮也产生与
此相应的侧偏角,车体本身自转趋势
更加严重。也就是说,车速越高,转
向时容易引起车辆的旋转和侧滑。
图3 2WS汽车中高速转向示意图
2.2.2 4WS转向特性与2WS的比较
理想的高速转向运动
状态是尽可能使车体的倾
向和前进方向一致,从而使
后轮产生足够的旋转向心
力。在4WS汽车通过对后轮
同向转向操控,使后轮也产
生侧偏角,使它与前轮的旋
转向心力相平衡,从而抑制
自转运动,得到车体方向和
车辆前进方向一致的稳定
转向状态。
图4 2WS和4WS汽车中高速转向比较图
3 四轮转向的实现途径
3.1 系统组成
如下图所示为4WS转向比例控制的系统图。前后的转向机构是机械式的连接方式,转向盘的转动通过前转向齿轮箱(齿轮齿条式)中的齿条带动转向横拉杆左右移动,使前轮产生转向,同时小齿轮的旋转输出通过连接轴由输入小齿轮传给后转向齿轮箱,经过转向枢轴和4WS转换器实现后轮转向。
图5 4WS汽车转向角比例控制系统
3.1.1转向枢轴
如下图(a)所示,后转向齿轮箱的转向枢轴是一个大轴承,其外圈与扇形齿轮为一体,围绕枢轴可左右转动;其内圈与连杆突出的偏心轴相连,连杆通过4WS转换器的电机连杆绕旋转中心作正反旋转。偏心轴可在转向枢轴机构内上下回转55°。
图6 转向枢轴示意图
通过连接轴的输入使小齿轮向左或向右旋转时,旋转力传递到扇形齿轮,再由转向枢轴通过偏心轴使连杆左右移动。连杆带动后转向横拉杆和后转向节臂实现后轮转向。如上图(b)所示为由于枢轴和偏心轴的运动,形成后轮的同相位和逆相位的转向原理。偏心轴的前端与枢轴左右转动,连杆也完全不动,后轮处于中立状态。随着偏心轴前端位置与枢轴旋转中心上、下方向的偏离,枢轴左右转动时连杆的移动量变大。偏置轴与后轮转向之间的动态关系是偏心轴前端位置在转向枢轴的上侧时为逆相位,下侧时为同相位。图(c)所示为转向枢轴旋转角度与连杆旋转角度和左右移动量的关系。
3.1.2转换器
4WS转换器主要由电动机、副电动机的驱动部分、行星齿轮的减速部分和旋转连杆的蜗杆组成。通常主电动机转动,副电动机处于停滞状态。副电动机的输出轴与行星齿轮的中心齿轮相连,齿圈就是4WS转换器的输出轴。通常中心齿轮固定不动,而与主电动机相连的小齿轮旋转。小齿轮围绕中心轮自传和公转,以此带动4WS转换器的输出齿圈。
3.2 四轮转向的控制方法
图7 后轮转向操纵机构
机械式转向操纵机构的情况是通过缆绳将转动传递到后带轮并带动控制凸轮,而凸轮推杆仿照凸轮外形运动带动阀套筒左右移动。转向盘向左转动时,后带轮做向右旋转。随着旋转,凸轮曲率半径变小,凸轮推杆被拉出,阀套筒就向左移动。转向盘右移时则相反。随着凸轮曲率半径增大,凸轮推杆被推进,阀套筒就向右移动。由于阀套筒和阀新的相对位移,使来自液压泵的工作压力油路被切换,转向盘向左转动时,阀套筒就向左移动,使油液进入液压缸的右室,动力活塞向左移,此时与活塞一体的拉杆向左移,将后轮向右转。
3.2.1大转向角控制
当前轮向左转向时,阀套筒向左方向移动,并与阀心之间产生相对位移。如图所示a和b部位被节流,高压作用于动力油缸的右室,推动活塞杆向左移动,而后轮就向右转向。当活塞杆向左移动时,因为脉冲电机不工作,控制阀杆就以支点A为中心回转并将阀心从B点移到左方的B’点。因此,打开处于节流状态的阀a部分以及b部分,降低动力油缸右室的压力,结果是当活塞杆移动到规定位置时,a部分以及b部分的节流压力与来自车轮的外力相平衡,后轮就不能进行更多的转向。
3.2.2小转向角控制
采用螺旋齿轮和曲柄组合结构将脉冲电动机的旋转运动变为阀芯的直线运动。当从动齿轮向左旋转时,阀控制杆的上端支点A就以从动齿轮中心O为回转中心移到A’。脉冲电机刚启动瞬间,后转向轴还没有运动,所以阀控制杆就以C 点为回转中心向左运动,杆中央的B点成为B’点,使阀芯向左移动。缆绳不动时,阀套筒固定不动,与阀套筒产生相对位移,阀的a部分以及b部分被节流,高压油进入油缸左室。
4 四轮转向技术展望
在一般行驶工况下,4WS系统能够在很大范围内有效地提高汽车的动力学响应特性,在极限工况下,它更能很好地保持汽车的操纵稳定性。不久的将来,4WS 技术将随着进一步发展而得到长足的进步,并在车辆系统中得到更广泛的应用,尤其是在提高车辆的中高速的操纵稳定性方面会得到广泛的应用。
四轮转向传动系统设计毕业设计论文
汽车专业毕业论文---答辩通过极具参考价值 摘要 本文主要研究了四轮转向传动系统的基本结构和工作原理,并对四轮转向传动路线进行了简要分析。以此为理论基础,以某汽车的相关参数设计了四轮转向转向器。包括前轮转向器的设计计算,后轮转向执行器的设计,齿条等强度的计算。四轮转向传动系主要是通过车速传感器、前轮转角传感器、前轮转速传感器、方向盘转角传感器、后轮转角传感器、后轮转速传感器,发送信号到四轮转向控制器内,信号经过处理,得出后轮所需的转角大小及方向,控制执行器完成转向。此系统可以改善车辆低速的转向灵活性和高速时的操纵稳定性,使汽车在转向时响应快,转向能力强,直线行驶稳定。前轮转向器是四轮转向的基础部件,是电机助力的齿轮齿条转向器。后轮执行器是驱动后轮转向的主要部件。通过对前轮转向器和后轮执行器的设计,为四轮转向技术整体设计提供了基础。 关键词四轮转向,齿轮齿条电动助力转向器,后轮转向执行器
汽车专业毕业论文---答辩通过极具参考价值 Abstract This paper mainly studies is the four-wheel steering transmission system the basic structure and working principle, and the four-wheel steering transmission routes are briefly analyzed.This theory, with a car related parameters of the four-wheel steering transmission system was designed. Including front wheel steering gear design calculation, rear wheel actuator design strength calculation, rack .Four-wheel steering transmission system is primarily through speed sensor, front wheel Angle sensor, front wheel speed sensor, steering wheel Angle sensor, rear Angle sensor, rear Lord Angle sensor, rear vice, rotational speed sensor sends a signal to the four-wheel steering controller inside, signal through processing, draw the rear required corner size and direction, control actuator finish turning. This system can improve vehicle speed steering flexibility and high speed control stability of, make cars in steering response quickly, steering capability is strong, run straight stability. Front wheel steering gear is the basic components, four-wheel steering motor hydraulically rack-and pinion steering gear Rear actuators are drive rear wheel steering the major components. Through the front wheel steering gear and rear actuator is designed for four-wheel steering technology integral design provides the basis. Key words Four-wheel steering gear rack of electric power steering gear, rear wheel actuators
四轮转向
简析汽车四轮转向系统 摘要:本文介绍了汽车四轮转向系统(4WS )的分类,主要构造,工作原理,分析了它的工作特性并阐述了其转向角比例控制原理,还对四轮转向与前轮转向(2WS )进行了对比,分析了它的优点,并对它的未来发展做出了展望。 1 概述 目前的轿车转向分为前轮转向(2WS )和四轮转向(4WS ),前者普遍使用,而后者则是一种新技术,主要应用于中高级车上。 所谓四轮转向,是指后轮和前轮相似,也具有一定的转向功能,不仅可以与前轮同向旋转,也可以与前轮反向旋转。其主要目的是增强汽车在高速行驶或侧向风力作用下的操纵稳定性,改善低速行驶时的操纵轻便性,便于汽车高速行驶时急转弯和由一个车道向另一个车道移动调整,减少调头时的转弯半径,以及在极狭窄的位置“平移”进入车位停泊。四轮转向系统,对于底盘较长,且经常需要在窄小地方行驶时的汽车有着明显的作用。 按照前后轮的偏转角和车速之间的关系,4WS 可分为转角传感型和车速传感型;按照控制和驱动后轮转向机构的方式,可分为机械式、液压式、电控机械式、电控液压式和电控电动式等。 2 四轮转向的基本原理 2.1低速时的转向特征 2.1.1理论准备 缩小最小转弯半径当前轮与后轮逆向转向时,前轴距中心的轴线与后轴距中心的轴线交点为转向中心P 。 图1 4WS 的转向中心 P 点的坐标(0x ,0y )的计算公式为
r f l x δδtan tan 0+= (2.1) r f l l l y δδδtan tan tan 0+?? = (2.2) 如果前外轮的转弯半径为R ,前后外侧车轮之间的转弯半径差值为R ?,则 BP R = 222020)tan tan tan ()tan tan 2 ( )()2 ( r f f r f f f l l b y l x b δδδδδ+?+++ ?-++= (2.3) CP AP R -=? 2 0202020)2 ( )()2 (y x b y l x b r f ++--++- = (2.4) 22)tan tan tan ()tan tan 2(r f f r f f l l b δδδδδ+?+++-=22 )tan tan tan ()tan tan 2(r f f r f r l l b δδδδδ+?+++-- 式中f δ——前轮的偏转角(左、右两前轮偏转角的平均值); r δ——后轮的偏转角(左、右两前轮偏转角的平均值); f b ——前轮距; r b ——后轮距; l ——轴距。 f f f l PQ R δδδtan cos sin ++= = (2.5) PO PQ R -=? f f f l δδδtan cos sin ++=r r r l δδδtan cos sin ++- (2.6) 从式(2.5)中可以看出当后轮与前轮逆相位转向时,四轮转弯半径比两轮转弯半径小。从式(2.6)中可以看出,当前、后轮偏转角相同时(f δ=r δ),前、后轮的转弯半径差值可能为0。从下图可以直观看出转向半径的大小。 2.1.2 2WS 与4WS 的比较
汽车转弯换向原理(简体)
第五章转向系统第一节转向机构概述 因车辆行驶的速度愈来愈高,因此转向机构的良好与否对行驶中车辆的操纵性、安全性及方向性具有决定的影响,所以转向系统须具有操纵之敏感、轻巧与准确、直行与转向的稳定、且不因路面的起伏与凹凸而造成方向盘的抖震等特性。5-1-1、转向原理 汽车的转向方式有第五轮转向及阿克曼转向两种,分述如下: 一、第五轮转向: 在指轴的中心处装有一只指轮(第五轮),使前轮以指轮为旋转中心而完成转向动作,如图5-1所示。仅限于早期的牛车及目前半联结车,不适合一般车辆用。 图 5-1 第五轮转向图 5-2 四连杆双曲柄机构 二、阿克曼转向 现代车辆的转向原理系依四连杆组中的双曲柄机构,如5- 2图所示的AC和BD两等长而不平行的曲柄,及AB和CD两平行而不等 长的连杆设计而成阿克曼转向几何。当以A点为瞬时中心将曲柄AC向右转动角
α1 时,经由连杆CD使曲柄BD 亦向右转动β1 角,此时,α1>β1;同理AC向左转动角α2时,经由连杆CD使曲柄BD亦向左转动β2 角,此时α2<β2。 若汽车之转向以A点及B点为转向枢轴,AC杆及BD杆相当于转向节臂,则CD相当于横拉杆,即是双曲柄机构的应用,因此汽车作转向时,内侧车轮的转角必大于外车轮的转向角度, 而转速则外车轮大于内车轮,如图5-3-(A)所示。而所谓阿克 曼转向几何原理即是两前轮的轮轴中心延长线与后轴中心的延长线必交于一点(Z点),此点即是转向中心之点。由图5-4-(B)可知 ZX为转向半径(外侧前轮至转向中心点),内侧前轮的转向角度大于外侧前轮之转角。 图5-3 阿克曼转向原理
5-1-2、转向机构的功能、种类、构造与原理(包含四轮转向机构) 一、整体式悬吊转向机构 由图5-4所示,整体悬吊系统的构件包括有方向盘、转向机轴(内含蜗杆)、转向齿轮、横轴、毕特门臂、直拉杆、连接杆、转向节及其 臂、横拉杆等所组成。各机件的功能及特性如下述。 图5-4 整体式悬吊转向机构 1 方向盘(Steering Wheel) 驾驶一部车辆无论是直行或转向的动作,均赖藉方向盘的转动来完成,因此方向盘不但要操作容易,尚须具相当的稳定性,方能提供驾驶的安全。 方向盘均制成圆形,宽度约与驾驶员的肩膀同宽(大约40~50 公分),型式则有Y型、X型及一字型,以方便驾驶员的握持及不妨碍仪表的观看为原则。 操作方向盘,驾驶员向左或向右3~5公分(或10~15度)时,而转向机构却不动的现象,称为方向盘之空档或自由行程
四轮转向系统概述
四轮转向系统概述 摘要:一般的前轮转向系统存在响应滞后、转向不灵活、高速行驶时操作稳定性差而渐渐无法满足人们对车辆主动安全性越来越高的要求,迫切需要一种高效的转向系统来实现良好的车辆安全性,在这种形势下,电子控制四轮转向系统应运而生。目前的 4WS 系统中,多数采用的是电控液压式4WS 系统,这种系统工作压力大、工作平稳可靠,但由于液压系统在结构、系统布置、密封性、能耗、效率等方面存在的缺点,以及在转向过程中存在响应滞后等缺陷,使得电控液压式 4WS 系统很难适应现代四轮转向汽车在转向灵敏性、快速性方面的要求,降低了汽车高速行驶稳定性。 1992 年日本本田汽车上采用了电控电动式4WS 系统。该 4WS 系统由于结构简单、控制效果好、燃油经济性好等优点而得到了迅猛发展,电控电动式 4WS 将是 4WS 汽车的发展趋势。 1 四轮转向系统( 4WS )及其控制目标 1.1 四轮转向系统 四轮转向(4-Wheel Steering ,简称 4WS)系统是指车辆在转向过程中,前后两组 4 个车轮都能根据需要起转向作用,能有效改善车辆的机动灵活性和操纵稳定性。 4WS 汽车在低速转弯时,前后车轮逆相位转向,可减小车辆的转弯半径;在高速转弯时,前后轮主要作同相位转向,能减少车辆质心侧偏角,降低车辆横摆率的稳态超调量等,进一步提高车辆操纵稳定性。 1.2 四轮转向系统的分类 按功能分为后轮小角度偏转系统和后轮在中高速时小角度偏转在低速时大角度偏转系统。按照车轮偏转执行机构的动力形式可以分为液压四轮转向系统、机械液压四轮转向系统和电子控制四轮转向系统等三大类。 1.3 电子控制四轮转向系统的整体目标 对电子控制四轮转向系统的基本性能要求:汽车低速行驶时,能够减小驾驶员作用于转向盘上的转向力;高速行驶时,能够通过转向盘向驾驶员反馈适度的转向反力。具体要求:(1)既要保证转向轻便省力,又要能够很好地反馈“路感”;(2)当计算机控制系统发生故障时,转向系统仍然能够保留人力转向功能;(3)在保证转向性能的前提下,尽可能降低转向时的动力消耗。 2 四轮转向系统构成概述 2.1电子控制四轮转向系统的控制目标及其系统组成 2.1.1 电子控制四轮转向系统的控制目标 由相关参考文献知四轮转向系统的主要控制目标就是要使车辆的运动方向与实际的驾驶方向在大多数情况下保持一致,也就是说车辆的侧偏角度应该在大部分时间内保持为零,即控制侧偏角为0度,但由于在实际的车辆行驶过程中,必须考虑到车辆在某些危险行驶状态的安全性,如路面的附着系数发生突然降低、在湿滑路面行驶、紧急躲避障碍物等情况下轮胎非线性因素,因此,在侧向和纵向加速度相对较小的情况下,利用上面分析的线性模型只可以得出车辆的线性反馈控制律,还必须同时结合神经网络、模糊控制等现代控制方法来克服车辆的非线性。在车辆转向时,传感器将前轮转向的信号传入ECU , ECU 进行分析运算之后,向电动机输出信号,电动机根据 ECU 传来的信号大小确定扭矩的
汽车四轮转向研究现状
北京信息科技大学 研究生部 汽车四轮转向研究现状的综述报告 学院:机电工程学院 专业:机械工程 班级:研1402班 学号: 2014020055 姓名:刘全攀 指导教师:林慕义(教授) 完成日期:2014 年1月10 日
目录 摘要 (1) 国内外关于汽车设计与空气动力学的研究现状 (2) 1.1 国内汽车设计与空气动力学的研究现状...................................... 错误!未定义书签。 1.2 国外汽车设计与空气动力学的研究现状 (4) 总结与展望 (5) 参考文献 (6)
摘要 介绍了四轮转向概况,并以实例展示目前国内外汽车四轮转向的研究发展现状。 关键词:四轮转向
国内外关于汽车设计与空气动力学的研究现状 1.1 国内汽车设计与空气动力学的研究现状 2012年朱智超、田丽娟介绍了线控转向的基本结构与工作原理,详细介绍了基于线控的转向汽车的发展史,并分析了国内研究线控转向的进展。在这基础上研究了线控转向的关键技术,推测了技术要求,最后对线控转向的发展进行了展望与总结。[1] 2012年桂林、任燕介绍了电控电动式四轮转向(4WS)系统的基本组成结构工作原理,对四轮转向系统的转向电机、整车驱动电机,以及传感器的选取做了较详细的介绍分析。在研究现有4WS电控技术的基础上,提出了在助力转向条件下前、后轮分别由电机驱动,同时由电控单元(ECU)监测控制的四轮转向技术。对未来四轮转向电控技术和展趋势做了进一步的分析展望。[2] 2013年李辰旸、罗文广为了充分发挥四轮转向技术在改善汽车操纵稳定性方面的优势,对汽车转向的理想状态进行分析,构建理想转向模型。依据具有二次型性能指标的最优控制理论,以汽车转向理想模型作为跟踪目标采用基于状态反馈和前轮前馈的控制策略,对四轮转向汽车后轮转向控制规律进行研究。利用 Matlab工具,对所提出的后轮转向最优控制方法进行仿真。仿真结果表明:所设计的后轮转角最优控制器改善汽车转向的瞬态与稳态响应特性,其瞬态响应的超调量减少,稳定时间缩短;侧向滑移的稳态值有所降低,从而提高汽车转向的操纵稳定性。[3] 2014年杜峰、闫光辉鉴于汽车正常情况下都运行在侧向加速度较小的线性工作区域,对基于线控技术的主动四轮转向汽车进行了前、后轮转角最优跟随控制器的设计和算法推导,建立了“人-车-路”闭环操纵系统模型,并进行闭环系统仿真和安全性评价。结果表明 : 基于最优控制的主动四轮转向汽车同时实现了减小车身质心侧偏角与跟踪期望横摆角速度的控制目标,改善了车辆高速行驶下的转向响应特性;相对于传统前轮转向汽车与比例控制四轮转向汽车,基于最优控制的主动四轮转向汽车具有更好的路径跟随精度和主动安全性。[4]
车辆四轮转向系统的控制方法_郭孔辉
1998年 吉 林 工 业 大 学 学 报Vol .28第4期JOU RNAL OF JI LIN UN IVERSITY OF TECH NOLOGY 总第92期 收稿日期:1998-03-02 *国家自然科学基金(5957522)资助项目 郭孔辉,男,1935年7月生,教授,中国工程院院士 车辆四轮转向系统的控制方法 * 郭孔辉 轧 浩 (吉林工业大学汽车动态模拟国家重点实验室)摘 要 系统地评述了车辆四轮转向系统的原理及其控制方法的发展,在此基础上指出四轮转向系统的研究必须以闭环综合评价为出发点,并与其它主动安全技术相结合才能真正达到实用阶段。 关键词 四轮转向 闭环评价 反馈控制 优化控制 神经网络 随着汽车技术的发展,作为实现主动安全性的方法之一的四轮转向技术日益受到重视。很多汽车厂商纷纷推出了带有四轮转向系统的概念车,如Honda ,Nissan ,M azda 等,并把一些成熟的四轮转向技术应用到了普及型汽车中,提高了汽车的主动安全性。四轮转向汽车的主要优点是在转向时能够保持重心侧偏角基本为零,极大地改善了横摆角速度和侧向加速度的瞬态性能指标。另外低速时能够减小汽车的转弯半径(前后轮转角方向相反),使汽车在低速行驶时更加灵活。 四轮转向系统按其结构可分为四类:机械式、液压式、电动式和复合式。按其控制方法〔2,3〕可分为:①定前后轮转向比四轮转向系统〔4〕;②前后轮转向比是前轮转角函数的四轮转向系统;③前后轮转向比是车速函数的四轮转向系统〔4〕;④具有一阶滞后的四轮转向系统;⑤具有反相特性的四轮转向系统〔5〕;⑥具有最优控制特性的四轮转向系统〔6〕;⑦具有自学习、自适应能力的四轮转向系统〔3〕。 1 后轮转向机理分析 为分析四轮转向车辆的机理,首先从后轮转向的特性分析入手。本文采用二自由度模型对前、后轮转向车辆进行比较。 1.1 侧向加速度时域特性比较 如图1所示,无论高速还是低速行驶,前轮转向车辆和后轮转向车辆的转向轮转动方向相同时(这里指转向轮皆顺时针转动),前轮转向车和后轮转向车所产生的车辆重心处— 1—
汽车四轮转向系统
汽车四轮转向系统 1、前言 随着现代道路交通系统和先进汽车技术的发展,汽车的主动安全技术日益受到重视。先进的主动底盘控制技术是汽车发展的重要方向,而四轮转向系统是主动底盘控制的重要组成部分。汽车的四轮转向(Four -wheel Steering——4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。以改善汽车的转向机动性、操纵稳定性和行驶安全性。 2、汽车四轮转向技术概况 从二十世纪初(1907年),日本政府颁发第一个关于四轮转向的专利证书开始,对于汽车四轮转向的研究一直伴随着汽车工业的发展而进行着。二战期间,美国的一些军用车辆和工程车辆上采用一种前、后轮逆相位偏转的简单机械式4WS系统,以适应恶劣的路况,改善汽车低速转向时的机动性能。1962年,在日本汽车工程协会的技术会议上,提出了后轮主动转向的4WS技术,开始了现代4WS转向系统的研究。在70年代末,本田(Honda)和马自达(Mazda)积极投入4WS的开发。1985年,日本的尼桑(Nissan)在客车上应用了世界上第一例实用的4WS系统,应用在一种车型上的高性能主动控制悬架(High Capacity Activety-Controlled Suspension――HICAS)上。随着对4WS这一领域研究的不断进展,出现了多种不同结构型式、不同控制策略的实用4WS系统。 一般来说,4WS汽车在转向过程中,根据不同的行驶条件,前、后轮转向角之间应遵循一定的规律。目前,典型4WS汽车的后轮偏转规律是: (1)逆相位转向 如图1(a)所示,在低速行驶或者方向盘转角较大时,前、后轮实现逆相位转向,即后轮的偏转方向与前轮的偏转方向相反,且偏转角度随方向盘转角增大而在一定范围内增大(后轮最大转向角一般为5°左右)。这种转向方式可改善汽车低速时的操纵轻便性,减小汽车的转弯半径,提高汽车的机动灵活性。便于汽车掉头转弯、避障行驶、进出车库和停车场。 (2)同相位转向 如图1(b)所示,在中、高速行驶或方向盘转角较小时,前、后轮实现同相位转向,即后轮的偏转方向与前轮的偏转方向相同(后轮最大转角一般为1°左右)。使汽车车身的横摆角速度大大减小,可减小汽车车身发生动态侧偏的倾向,保证汽车在高速超车、进出高速公路、高架引桥及立交桥时,处于不足转向状态。 现在,有许多4WS汽车把改善汽车操纵性能的重点放在提高汽车高速行驶的操纵稳定性上,而不过分要求汽车在低速行驶的转向机动灵活性。其工作特点是低速时汽车只采用前轮转向,只在汽车行驶速度达到一定数值后(如50Km/h),后轮才参与转向,进行同相位四轮转向。
液压式四轮转向系统设计
摘要 四轮转向是指汽车的后轮也和前轮一样具有一定的转向功能,不仅可以与前轮同方向转向,也可以与前轮反方向转向。四轮转向汽车的环保性和节能性与现代汽车的设计理念相吻合,它适应汽车未来发展的趋势,存在广阔的发展前景。本文对液压式四轮转向系统进行了研究,主要工作如下: 对课题进行了文献检索,查看了相关资料;对国内外四轮转向汽车的研究现状进行了详细的介绍,明确了设计的基本内容及需解决的主要问题;对四轮转向系统进行了分析,包括受力分析和运动学分析;设计了三种四轮转向汽车的转向液压系统方案,经过对比分析,选定其中一种作为最终的液压式四轮转向系统方案;确定该方案中液压系统的参数;对该方案中液压系统的液压缸进行设计和计算;对该方案中液压系统的液压元件进行选取。 关键词:四轮转向;系统分析;液压系统;液压缸;液压元件
ABSTRACT Four-wheel steering refers to the rear car and has some of the same front steering function, can not only with front wheel steering, also can in opposite direction with front wheel steering. Four-wheel steering the environment protection and energy conservation car with modern car design idea coincide, it to adapt to automobile future development trends, existing broad development prospects. Based on the hydraulic four-wheel steering system and main work is as follows: On issues of literature retrieval, examined the related material; To domestic and international research status of four-wheel steering cars were introduced in detail, has been clear about the design of the basic content and the main problems need to be solved; For four-wheel steering system is analyzed, including stress analysis and kinematics analysis; Design three four-wheel steering automobile steering hydraulic system scheme, through comparative analysis, select one as the final the hydraulic four-wheel steering system solution; To determine this scheme hydraulic system parameters; For this scheme of the hydraulic cylinder hydraulic system design and calculation; For this scheme of the hydraulic system for selecting hydraulic element. Key words: Four-wheel steering; System analysis; Hydraulic system; The hydraulic cylinder; Hydraulic components
汽车转向
0 引言 在车辆的操纵稳定性控制中,比较常见的是利用纵向控制产生横摆力矩来提高车辆的稳定性,称为直接横摆力矩控制。直接横摆力矩控制常常是以牺牲车辆的部分制动性能为代价,而采用主动转向控制来实现车辆稳定性控制却可以在不影响制动的情况下达到同样的效果,并且其所需要的轮胎力只有制动时的约1/4。在诸如对开路面制动等工况下,主动转向还可以有效地抵消由于不平衡制动力所产生的扰动力矩,保证车辆的稳定行驶。由于具有上述优势,主动转向技术成为当前底盘动力学控制发展的热点之一。 常见主动转向系统有主动前轮转向系统AFS和四轮转向系统(也称为主动后轮转向)。主动前轮转向是随着线控转向技术的发展而发展起来的一项技术,并且随着宝马的主动转向系统装配实车而进入实用阶段。由于主动前轮转向与传统车辆的结构能够很好兼容,同时对车辆操纵稳定性的提高效果明显,显示出了良好的发展前景,成为转向系统未来发展的主要方向之一。 1 主动前轮转向系统的工作原理 目前可用于乘用车的主动转向系统主要有两种形式:一种是以宝马和ZF公司联合开发的AFS系统为代表的机械式主动转向系统,通过行星齿轮机械结构增加一个输入自由度从而实现附加转向,目前已装配于宝马5系的轿车上,以及韩国的MANDO、美国的TRW、日本的JTEKT公司也有类似产品;另一种是线控转向系统(SWB),利用控制器综合驾驶员转向角输入和当时的车辆状态来决定转向电机的输出电流,最终驱动前轮转动。该系统在许多概念车和实验室研究中已广泛采用,如通用公司的Sequel燃料电池概念车就采用了线控转向技术。 线控转向和机械式主动转向系统最大的区别体现在当系统发生故障时,机械式主动转向系统仍能通过转向盘与车轮间的机械连接确保其转向性能,而线控转向必须通过系统主要零件的冗余设计来保证车辆的安全性。由于上述安全性和可靠性的原因,目前法律上还不允许将线控转向系统直接装备车辆。 1.1 机械式主动转向系统 下面以宝马的AFS系统为例,介绍机械式主动转向系统的结构和工作原理。该系统主要由三大子系统组成:液压助力齿轮齿条动力转向系统、变传动比执行系统和电控系统。系统原理图如图1所示。
主动前轮转向控现状与发展趋势
主动前轮转向控制技术的现状与发展趋势来源:中国汽车工业信息网发布时间:2009年7月2日 ? 0 引言 在车辆的操纵稳定性控制中,比较常见的是利用纵向控制产生横摆力矩来提高车辆的稳定性,称为直接横摆力矩控制。直接横摆力矩控制常常是以牺牲车辆的部分制动性能为代价,而采用主动转向控制来实现车辆稳定性控制却可以在不影响制动的情况下达到同样的效果,并且其所需要的轮胎力只有制动时的约1/4。在诸如对开路面制动等工况下,主动转向还可以有效地抵消由于不平衡制动力所产生的扰动力矩,保证车辆的稳定行驶。由于具有上述优势,主动转向技术成为当前底盘动力学控制发展的热点之一。 常见主动转向系统有主动前轮转向系统AFS和四轮转向系统(也称为主动后轮转向)。 主动前轮转向是随着线控转向技术的发展而发展起来的一项技术,并且随着宝马的主动转向系统装配实车而进入实用阶段。由于主动前轮转向与传统车辆的结构能够很好兼容,同时对车辆操纵稳定性的提高效果明显,显示出了良好的发展前景,成为转向系统未来发展的主要方向之一。 1 主动前轮转向系统的工作原理 目前可用于乘用车的主动转向系统主要有两种形式:一种是以宝马和ZF公司联合开发的AFS系统为代表的机械式主动转向系统,通过行星齿轮机械结构增加一个输入自由度从而实现附加转向,目前已装配于宝马5系的轿车上,以及韩国的MANDO、美国的TRW、日本的JTEKT公司也有类似产品;另一种是线控转向系统(SWB),利用控制器综合驾驶员转向角输入和当时的车辆状态来决定转向电机的输出电流,最终驱动前轮转动。该系统在许多概念车和实验室研究中已广泛采用,如通用公司的Sequel燃料电池概念车就采用了线控转向技术。 线控转向和机械式主动转向系统最大的区别体现在当系统发生故障时,机械式主动转向系统仍能通过转向盘与车轮间的机械连接确保其转向性能,而线控转向必须通过系统主要零件的冗余设计来保证车辆的安全性。由于上述安全性和可靠性的原因,目前法律上还不允许将线控转向系统直接装备车辆。 1.1 机械式主动转向系统 下面以宝马的AFS系统为例,介绍机械式主动转向系统的结构和工作原理。该系统主要由三大子系统组成:液压助力齿轮齿条动力转向系统、变传动比执行系统和电控系统。系统原理图如图1所示。
转向前桥-横拉杆臂设计-基础计算内容-20200307
转向前桥-横拉杆臂设计-基础计算内容 -20200307零件的设计的前提的是要知道载荷和约束条件。 约束:横拉杆臂与转向节和横拉杆总成连接。 载荷:汽车转向、制动、侧滑时,轮胎对地面的作用力传递到横拉杆臂上。 关于载荷的确定: 1,汽车原地转向阻力矩,可以由经验公式初步确定。 2,行车中的转向力矩,会大大小于原地转向力矩。因此值和很多因素有关,对车桥厂来说确认较困难。所以设计时只考虑原地转向阻力矩的情况。 3,紧急制动时,因为有主销偏置距,所以地面会传递过来一个力矩。 4,侧滑时,因为车桥在底盘布置中,前转向桥会有一个后倾角,一般在3°以内,此时会产生一个后倾拖距。(后倾起到高速行驶时车轮自动回正的作用,车速越高,回正效果越好。因第2条描述判断,其力矩值应该也是小于原地转向阻力矩的。)又因后倾角一般都是小于主销内倾角的,所以侧滑产生的力矩应该是小于紧急制动产生的力矩值。所以设计横拉杆臂时可以不计算此值。 5,若整车厂提供有方向机的最大扭矩和相关的臂比和布置信息,也可以则算出一个力矩。 横拉杆臂的承载能力要大于上述计算出的最大力矩值。 法规中没有专门对横拉杆臂台架实验要求。但有横拉杆总成的试验(QCT 648-2015 汽车转向拉杆总成性能要求及台架试验方法),要求加载满载轴荷的1/3,横拉杆总成寿命超过100万次。 我们在设计横拉杆臂时,需要结合以前的成熟产品的载荷系数(扭矩值)。按经验载荷系数设计的产品都是可以直接满足设计需求的。 但做一些基础的计算也是有必要的,可以起到设计参考的价值。基础计算包括汽车原地转向阻力矩和紧急制动时产生的弯矩值。还应该考虑转向梯形机构运转时产生的作用力臂的变化(力臂越小,作用的力值越大)。 因本人手上没有整车方面的信息(方向机相关),所以没有计算上述第5条值。但是一般满足上述1和3条的载荷要求,就可以满足方向机的作用。因为假设方向机载荷再大的话轮胎就打滑了。 汽车原地转向阻力矩。目前的计算方法有:原苏联的半经验公式(见《汽车工程手册》)、雷索夫推荐公式和塔布莱克推荐公式(见《工程机械底盘构造与设计》)。 紧急制动时产生的弯矩值。计算方法参考《车桥设计》。 假设按某一6.5T前桥。 1,按QCT 648,假设横拉杆球销中心距工字梁前后距离为219mm。 则试验加载载荷为21233N 2,计算原地转向阻力矩: A,雷索夫推荐公式:
摩托车疲劳耐久台架试验与寿命预测研究
摩托车疲劳耐久台架试验与寿命预测研究 发表时间:2019-09-18T10:05:55.743Z 来源:《电力设备》2019年第7期作者:郑景辉 [导读] 摘要:疲劳付久性是直接影响摩托车行驶安全的重要性能,摩托车生产企业非常有必要针对每款新车开展疲劳而寸久性试验以某款摩托车为例,进行路谱采集和疲劳耐久试验,采集车架上某关键邵位的应变监刚信号,探索采用一曲线和线性累积损伤理论对车架寿命进行预测一通过试验表明台架叶久试验相比道路耐久试验更高效、更安全,为摩托车的疲劳付久试验和车架的优化设计提供了参考依据。 (湛江德利车辆部件有限公司) 摘要:疲劳付久性是直接影响摩托车行驶安全的重要性能,摩托车生产企业非常有必要针对每款新车开展疲劳而寸久性试验以某款摩托车为例,进行路谱采集和疲劳耐久试验,采集车架上某关键邵位的应变监刚信号,探索采用一曲线和线性累积损伤理论对车架寿命进行预测一通过试验表明台架叶久试验相比道路耐久试验更高效、更安全,为摩托车的疲劳付久试验和车架的优化设计提供了参考依据。 关键词:现状;特点及功能;设计总结 引言:随着人类环境保护意识的增强及国家倡导的节能减排措施的实施,摩托车发动机的经济性及排放性已成为各摩托车厂家互相竞争的重要技术指标。电子控制燃油喷射技术以其良好的经济性和排放性成为改造传统化油器式发动机以满足越来越严格的排放法规的首选技术方案。 一、国内外双前轮车辆的现状调研 随着改革开放的深入进行,特别是我国加入世界贸易组织以来,我国的汽车、摩托车工业都有了长足的发展。经过近半个多世纪的发展,我国已成为世界摩托车生产大国。据公安部交通管理局统计,截至2008年底,我国机动车保有量接近1.7亿辆。其中,汽车大约6467万辆,摩托车约8953万辆。由于汽车、摩托车工业的飞速发展,我国石油等能源的消耗量剧增。2000年我国进口原油8000万吨,2010年将进口1.5亿吨,国家能源安全面临严峻挑战。进入21世纪以来,人类社会并不安宁,能源安全问题成为发展经济时首先考虑的重要问题,因此石油资源已经成为我国经济建设的战略资源。与此同时,机动车保有量的增加特别是排放较差的摩托车的增加对我国日益恶化的大气环境造成了极大的压力。正因为此,国内许多大中城市开始禁止或限制摩托车上牌、上路。同时,世界各国和地区针对摩托车排放的标准不断提高,也影响到国产摩托车的出口。如果摩托车排放及经济性差的问题得不到很好的解决,这将影响到我国摩托车产品的国际竞争力和摩托车工业的良性发展。 因此研究开发油耗低、排放好的摩托车发动机,既符合我国经济建设的长远战略利益,同时还可以降低摩托车对环境的污染以及激活、扩大摩托车的市场。电子控制燃油喷射技术以其明显的节能效果和较好的排放性能成为改造传统化油器式发动机的最佳选择。 双前轮摩托车又被称为“Leaning Multi-Wheeled”摩托车,即“倾摆式多轮”摩托车,下文简称 LMW,自 2006 年开始,由比亚乔、雅马哈、本田为代表的国外厂商开始陆续推出 LMW 类型的摩托车,如比亚乔 MP3 系列、雅马哈 LMW-9 系列、本田Neowing 等车型,国外此类摩托车量产车型的售价最低约为 16 000 元人民币(不含税,泰国),普遍售价在7 万人民币左右(不含税,比亚乔、雅马哈等,欧洲),迄今为止,LMW 车型在爱好旅行、重视驾驶乐趣的欧美市场已经占有一席之地,某些机车市场成熟的东南亚国家,如泰国,也有很多在售 LMW 车型;国内逗哈科技于 2016 年推出了中国首款双前轮智能机车,采用电力驱动,售价不足 1 万人民币(含税),此车型在行业内颇受关注。 对于双前轮摩托车而言,早年比亚乔和雅马哈合作开发出了最早应用于实际产品的 LMW 技术,后来由于专利问题,雅马哈公司自行开发了一套 LMW 技术,2010 年后,本田公司也以独立技术参与到 LMW 市场中来,国内逗哈科技的新产品也采用了其自主产权的下置式可侧倾双前轮结构,通过专利查询可知,早在90年代国内就有技术人员申报LMW类的结构专利,并且通过专利申报;所有这些型式的LMW车辆设计,其前轮结构无非是包含了两个部分,即:竖直平面上的双前轮同步同角度侧倾、水平平面上的阿克曼原理下的双前轮同步异角度转向。 竖直平面上的双前轮同步同角度侧倾:利用可以在竖直平面内围绕车辆对称中心平面和水平面交线自由摆动的主销来实现这个功能。庞巴迪公司曾推出过前轮不能侧倾的双前轮重型机车,就原理上讲,庞巴迪的设计更像是倒三轮汽车,此类车辆不在本文讨论范围内;可侧倾的结构使得双前轮车辆可以和普通两轮车一样同时依靠侧倾和前轮扭转来转向,增加了驾驶乐趣,也有利于过弯稳定性,同时对不同路况的适应性也大大增加。 水平平面上的双轮同步异角度转向:和普通汽车的转向机构类似,车辆转向时,内外轮的角度不是相同的,而是必须符合阿克曼原理,用一套专门设计的梯形机构来实现转向时内外轮的纯滚动。相对于普通两轮车辆,三轮结构带来了一定的稳定性,并且多一个轮子使得抓地力提高,更可贵的是得益于额外的一套碟刹系统,急刹制动表现强于同规格两轮车辆。 总之,双前轮车辆的核心技术价值在于:既保留了摩托车的驾驶乐趣,又能适应多种路面、同时增加安全性。 二、设计指标 2.1适用范围 本夹持装置可适用于轮胎外侧距离580 mm以内、轮胎内侧距离280 mm以上的双前轮电动车的续驶里程试验或者同尺寸双前轮燃油摩托车的排气污染物控制装置耐久性试验等试验项目。 尺寸指标、外廓尺寸、中心螺杆的相关问题 本夹持装置的外廓尺寸为:平面700×800 mm(除安装耳),高度为351.6 mm,夹板长度为500 mm,左右两侧每侧两个夹板的高度为:内侧80 mm、外侧100mm,前挡板高度为350 mm,夹板内侧黏贴有厚度为2 mm的弹性皮质材料。为防止焊接变形,底板厚度为16 mm。 与剪式千斤顶原理相同,本设计中内侧夹板的运动由双头中心螺杆和 4 条连杆共同完成。 中心螺杆行程为70 mm×2,考虑到加工的便利性,中间未使用位置的螺纹也加工,拟加工的螺纹总长度为422 mm,螺杆为分度圆直径为20 mm的粗牙螺杆。四边形多连杆机构的工作角度为76度至120度,远离多连杆机构的“死点”(即机构中使运动具有不确定性的情况的时刻,一般为极限角度),可以保证运动的灵活。 2.2功能及结构 本装置旨在于试验时夹持双前轮车辆并保持车辆的“模拟直线行驶”状态,同时将车辆前轮紧紧固定在试验台上,并且两前轮中间的转
四轮转向1-汽车底盘
四轮转向系 四轮转向系使汽车低速行驶转向并且转向盘转动角度很大时,后轮相对于前轮反向偏转,并且偏转角度随转向盘转角增大而在一定范围内增大。如汽车急转弯、调头行驶、避障行驶或进出车库时,从而使汽车转向半径减小,转向机动性能提高。汽车在高速行驶转向时,后轮应相对于前轮同向偏转,从而使汽车车身的横摆角度和横摆角速度大为减小,使汽车高速行驶时的操纵稳定性显著提高。 从后轮转向装置的控制方法上,四轮转向系可分为转角随动型四轮转向系和车速感应型四轮转向系。转角随动型四轮转向系都是采用机械式的;而车速感应型四轮转向系有液压式、电子控制液压式和全电子控制式。下面介绍不同类型的四轮转向系。 一、机械式四轮转向系 1.机械式四轮转向系统的组成 如图11-39所示,机械式四轮转向系主要由转向盘、前轮转向器、后轮取力齿轮箱、后轮转向传动轴、后轮转向器等组成。后轮转向也是绕转向节主销偏转的,其结构与前轮相似。
图11-39 机械式四轮转向系的组成 1-后轮转向取力齿轮箱 2-转向盘 3-后轮转向传动轴 4-后轮转向器2.后轮转向取力齿轮箱 1) 结构 后轮转向取力齿轮箱的结构如图11-40所示。后轮转向取力齿轮箱中只有一对齿轮—齿条传动机构,其齿条与前轮转向器中的齿条共用,取力齿轮固定在与后轮转向传动轴相连的齿轮轴上,齿轮轴通过衬套支撑在齿轮箱壳的轴承孔中,后轮转向取力齿轮箱固定在车架上。
图11-40 后轮转向取力齿轮箱 1-小齿轮输出轴 2-齿条 2) 工作原理 当转动转向盘使前轮转向时,后轮转向取力齿轮箱中的齿条在前轮转向器中转向齿条的带动下左、右移动,驱动与其啮合的取力齿轮旋转,并带动后轮转向传动轴旋转,转向盘的转向操纵力的方向、大小、快慢就由后轮转向传动轴传给后轮转向器。 3.后轮转向器 1) 功用 后轮转向器的功用是利用后轮转向传动轴传来的转向操纵力,驱动后轮偏转并实现后轮转向。另外,还要控制后轮在转向盘的不同转角下,相对于前轮作同向或异向偏转。 2) 结构 后轮转向器的结构如图11-41所示,主要由偏心轴、齿圈、行星齿轮、滑块、导向块、转向横拉杆和后轮转向器壳等组成。