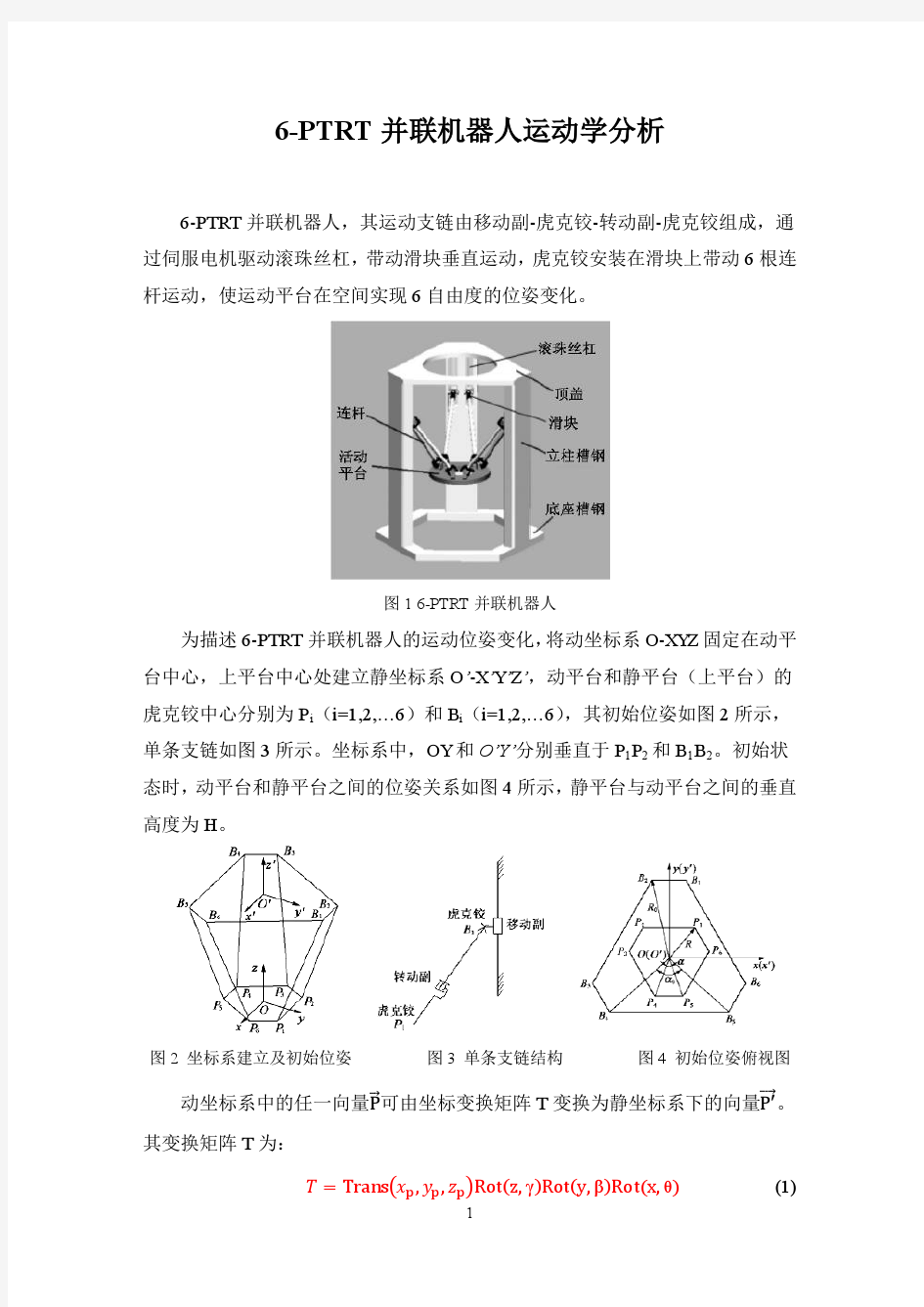
6-PTRT并联机器人运动学分析

puma250机器人运动学分析
焊接机器人运动分析 摘要:针对puma250焊接机器人,分析了它的正运动学、逆运动学的问题。采用D-H坐标系对机器人puma250 建立6个关节的坐标系并获取D-H 参数,并对其运动建立数学模型用MATLAB编程,同时仿真正运动学、逆运动学求解和轨迹规划利用pro-e对puma250建模三维模型。 关键词:puma250焊接机器人;正逆解;pro-e;Matlab;仿真 一、建立机器手三维图 Puma250机器人,具有6各自由度,即6个关节,其构成示意图如图1。各连杆包括腰部、两个臀部、腕部和手抓。设腰部为1连杆,两个臀部分别为2、3连杆,腰部为4连杆,手抓为5、6连杆,基座不包含在连杆范围之内,但看作0连杆,其中关节2、3、4使机械手工作空间可达空间成为灵活空间。1关节连接1连杆与基座0,2关节连接2连杆与1连杆,3关节连接3连杆与2连按,4关节连接4连杆与3连杆,5关节连接5连杆与4连杆。各连杆坐标系如图 2 所示。
图1 puma250 机器人二、建立连杆直角坐标系。
三、根据坐标系确定D-H表。 四、利用MATLAB 编程求机械手仿真图。>>L1=Link([pi/2 0 0 0 0],'standard'); L2=Link([0 0 0 -pi/2 0],'standard'); L3=Link([0 -4 8 0 0],'standard'); L4=Link([-pi/2 0 8 0 0],'standard'); L5=Link([-pi/2 0 0 -pi/2 0],'standard'); L6=Link([0 2 0 -pi/2 0],'standard'); bot=SerialLink([L1 L2 L3 L4 L5 L6],'name','ROBOT'); ([0 0 0 0 0 0])
焊接机器人逆运动学位姿分析
1.1连杆的坐标系 应用D-H 法来建立机器人杆件的坐标系。在这种坐标系中,可以把机械手的任一连杆i (i=1,2,3···,n )看作是一个刚体,与它相邻的两个关节i 、i-1的轴线i 和i-1 之间的关系也由它确定,如图1,可以用以下四个参数描 式中,cθi =cosθi ,sθi =sinθi ,i=1,2,3,···,n 图1连杆坐标系{i}到{i-1}的变换 i αi-1/(rad )a i-1/(cm )d i /(cm 12340 90°090°042.5410014.520011.895.3表1机器人连杆参数表
定义了连杆坐标系和相应得连杆参数,就能建立运动学方程,焊接机器人末端关节的坐标系{n}相对于基础坐标系{0}中的齐次变换公式为: 对于6自由度的焊接机器人公式可以写为 (2 变换矩阵0 n T是关于n个关节变量的函数,这些变量 可以通过放置在关节上的传感器测得,则机器人末端连杆再基坐标系中的位置和姿态就能描述出来。 E n表示焊接机器人末端关节的姿态, 器人在世界坐标系中的位置。[3] 2机器人的逆运动学分析 逆运动学求解是已知机器人末端的位置和姿态即 求解机器人对应于该位置和姿态的关节角 只要0 n T表示的末端连杆坐标系的位置和姿态位于机 械手的可达空间内,则运动学方程至少有一个解, 达空间内,机械手具有任意姿态,导致运动学方程可能出现重解。 机器人的运动学方程是一组非线性方程式, 求解过程中,我们逐次在公式(4)的两端同时左乘一 即为 在上式两边的矩阵中寻找简单的表达式或常数, 对应相等,计算过程如下: ( ( ( ( ( (3求取各关节的解集 依靠D-H法求解关节角的过程是和焊接机器人本身的结构相关的,换句话说,也就是特定配置的机器人需要特定的解决方案。通过公式(6)-(16)可以看出每个关节角的结果是不唯一的,如果采用已有的求解方法,显而易见该过程是缓慢的,复杂的。本文提出了一种计算最终执行器位置的所有精确值的算法。该算法是在MATLAB 程实现的。通过该算法得到各节点的解是更快速、有效的。 用变换矩阵 6T定义一条具有两个端点A和B 轨迹,如公式(17)和(19)。从而θ能够被求出,如公式20)
工业机器人的基本参数和性能指标
工业机器人的基本参数和性能指标 表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。 (1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。理解机器人的工作空间时,要注意以下几点: 1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。 2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。 3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。 (2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。 自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。机器人的自由度数目越多,功能就越强。日前工业机器人通常具有4—6个自由度。当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。冗余度的出现增加了机器人工作的灵活型,但也使控制变得更加复杂。 工业机器人在运动方式上,总可以分为直线运动(简记为P)和旋转运动(简记为R)两种,应用简记符号P和R可以表示操作机运动自由度的特点,如RPRR表示机器人操作机具有四个自由度,从基座开始到臂端,关节运动的方式依次为旋转-直线-旋转-旋转。此外,工业机器人的运动自由度还有运动范围的限制。 (3)有效负载(Payload)有效负载是指机器人操作机在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。 机器人在不同位姿时,允许的最大可搬运质量是不同的,因此机器人的额定可搬运质量是指其臂杆在工作空间中任意位姿时腕关节端部都能搬运的最大质量。
平面并联机器人的运动学和动力学研究
平面2自由度并联机器人的运动学 和动力学研究 林协源1刘冠峰1 (1.广东工业大学广州) 摘要:本文面向高速高精LED电子封装设备设计了一种高速高精2自由度平面并联机构(2-PPa并联机器人)。该机构由一个动平台和两个对称分布的完全相同的支链组成,每个支链中都有一个移动副(驱动关节)和一个由平面平行四边形组成的特殊转动动副。首先推导出该机器人的运动学模型包括正反解;其次结合焊线机实际工艺要求提出多项机构性能指标对该机构的几何参数进行多目标优化;然后基于Euler-Lagrange 方程建立该机器人的动力学方程,最后通过算例分析两个移动副在动平台按照一定轨迹运动时其速度、加速度和驱动力的变化规律。这些为接下来研究该机器人的动态性能和系统解耦控制等都具有重要意义。 关键词:2自由度平面并联机器人运动学动力学 Kinematic and Dynamic Analysis of a Planar Two-degree-freedom Parallel Manipulator LIN Xieyuan1LIU Guanfeng1 (1.Guangdong University of Technology Guangzhou ) Abstract:In this paper,a type of planar 2-DOF parallel manipulator is proposed for uses in design of high- speed and high-accuracy LED packaging machines. The manipulator consists of a moving platform and two identical subchains. Each subchain is made of a prismatic joint (actuator) and a parallelogram with four passive revolute joints. We first derive the kinematic model of the manipulator. Then, we determine the optimal geometric parameters of the manipulator by solving a multi-goal optimization problem based on performance indices. We compute the dynamic equation use Euler-Lagrange formulation and use it to analyze the relationship between velocity, acceleration and driving torque of joints. This analysis is important for further study of the dynamic performance and the decoupling control methods for the manipulator. Key words:2-DOF Planar parallel manipulator Kinematics Dynamics 0 前言 在电子、包装和食品等轻工业场合中,机器人只需要3到4个自由度即可满足使用要求。串联机器人由于自身具有较大的质量和惯性,很难应用到需要高速高负载能力的场合。并联机器人很好的弥补了串联机器人这方面的不足。所以,近年来少自由度并联机器人的研究相当热门。其中3自由度并联机器人的研究已是相当深入[1-4]。在Z方向只需要较小的操作位移时,末端搭载一个1或2自由度的串联机构的2自由度并联机器人相对应3或4自由度的并联机器人会显得更加经济适用。 清华大学曽提出过两种平面2-DOF并联机器人:一种是PRRRP(P表示移动副,R 表示转动副)并联机器人,其中两移动副运动方向平行,且机器人的末端姿态是可变的[5];一种是2-PPa(Pa表示平行四边形机构)并联机器人,同样,该机器人的移动副运动方向也平行,不过其末端姿态不可变[6]。文章[6]中的并联机器人最后应用在了立式机床上。同样的2-PPa并联机器人,上海交通大学将其应用在高速高精度的场合
SCARA机器人的运动学分析
电子科技大学 实验报告 学生姓名: 一、实验室名称:机电一体化实验室 二、实验项目名称:实验三SCARA 学号: 机器人的运动学分析 三、实验原理: 机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。 各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程) 为: n x o x a x p x 0T40T1 11T2 22T3 d3 n y o y a y p y ( 1-5)3T4 4= o z a z p z n z 0001 式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0} 的位姿,是机械手运动分析和综合的基础。 式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4 o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4 o z0 , a x0 , a y0 , a z1 p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3 机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1 A arctg 1 A 2 l 12 l 22 p x 2 p y 2 arctg p x 式中:A p x 2 ; p y 2l 1 p y 2 2)求关节 2: 2 r cos( 1 ) arctg ) l 1 r sin( 1 式中 : r p x 2 p y 2 ;arctg p x p y 3). 求 关节变 量 d 3 令左右矩阵中的第三行第四个元素(3.4)相等,可得: d 3 p z 4). 求 关节变 量 θ 4 令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即: sin 1 n x cos 1n y sin 2 cos 4 cos 2 sin 4 由上式可求得: 4 arctg ( sin 1 n x cos 1 n y )2 cos 1 n x sin 1 n y 四、实验目的: 1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法; 2. 掌握 SCARA 机器人的运动学方程的建立; 3. 会运用方程求解运动学的正解和反解; ( 1-8) ( 1-9) ( 1-10 )
4-RCRP并联机器人运动学分析与仿真
电气与自动化 孙德智?等 4-RCRP并联机器人运动学分析与仿真 Machine Building Automation?Jun2014?43(3):165~167 作者简介:孙德智(1989-)?男?江苏盐城市人?硕士研究生?研究方向:并联机器人全域性能分析及优化?4-RCRP并联机器人运动学分析与仿真 孙德智?郭钢?余伟 (南京理工大学机械工程学院?江苏南京210094) 摘一要:以4-RCRP并联机器人为研究对象?介绍4-RCRP机器人的结构特点?分析了该机器人的运动学特征?求出了该位置的正反解?然后运用UG软件对该机器人进行建模?最后运用 ADAMS软件进行了运动学仿真验证? 关键词:并联机器人?运动学分析?运动学仿真 中图分类号:TP242一一文献标志码:A一一文章编号:1671 ̄5276(2014)03 ̄0165 ̄03 KinematicAnalysisandSimulationof4 ̄RCRPParallelManipulator SUNDe ̄zhi?GUOGang?YUWei (SchoolofMechanicalEngineering?NanjingUniversityofScienceandTechnology?Nanjing210094?China) Abstract:Thispapertakesthe4 ̄RCRPparallelmanipulationasobjectofstudy?introducesitsmechanismcharacteristics?analyzes thekinematiccharacteristicsandobtainsthesolutionsofboththeinverseanddirectkinematics.Thenitbuildsits3DmodelwithUGsoftware?finallysimulatesandverifiesthekinematicfunctionswithADAMSsoftware. Keywords:parallelmanipulator?kinematicsanalysis?kinematicssimulation 0一引言 并联机构具有高刚度二高精度和高承载能力等优点 而成为人们研究的热点[1]?4 ̄RCRP并联机器人与广泛 应用的SCARA串联机器人一样?可以实现空间的三维移 动与绕z轴的转动?以该机器人为基础可以设计出多种用途的空间并联机器人二并联虚拟轴机床二微动机器人等? 利用虚拟样机可以代替物理样机对产品进行创新设计二测试和评估?从而缩短开发周期?降低成本?改进产品设计品质[2]?为了有效地求解4 ̄RCRP并联机器人运动学问题?利用虚拟样机技术对其进行运动学建模?并加以仿真?以验证其运动学求解的正确性? 1一4 ̄RCRP并联机器人机构简介 4 ̄RCRP并联机器人由4条对称的R ̄C ̄R ̄P链二一个 定平台以及一个动平台组成?图1所示? 2一4-RCRP并联机器人的位置分析 机器人的位置分析是求解机构的输入与输出构件之间的位置关系?可由几何关系求解其位置正逆解?如图 2?定平台特征尺寸OAi =R(i=1?2?3?4)?动平台特征尺寸O Bi =r?点O 在O-xyz坐标系的坐标(x?y?z)就是动平台的三个移动自由度?动坐标系O -x y z 相对于定平台坐标系O-xyz的姿态就反映了动平台的姿态?F是动平台的转动自由度?可以用矩阵[T]表示? 各支链坐标系 图1一4-RCRP并联机器人模型 A 2′ 图2一在o-xyz坐标系的投影 561
六自由度机器人运动分析及优化
本 科 毕 业 论 文(设 计) 题目(中文 学学 完 成 日 期 2017 年 3 月
摘要 当今世界,工业化日趋成熟,机器人被广泛的应用于各行各业,最常用到的有四自由度,六自由度机器人。其中,自动化水平较高的汽车制造业和电子装配业经常常常要使用到六自由度机器人。因此对其实施运动学分析,是进行科学设计的基础,也是降低机器人生产成本,优化机器人运动轨迹的前提。此外,运动分析过程有效的模拟了机器人运动的真实情况,有助于提供有效可行的优化方案。本文主要探讨六自由度机器人的运动分析,基于经典运动学以及动力学的研究方法概念,首先通过solidworks做出机械臂各部分零件的三维图,然后通过SolidWorks装配出六自由度机器人机械臂的三维模型。通过该模型,选取其中一个关节和底座,并用SolidWorks进行运动学分析,对六自由度机器人的运动学和动力学计算方法进行了仿真验证。最后得到六自由度机器人的其中一个自由度的运动仿真实例。通过对该运动仿真实例的分析,得出最佳优化方案,优化机器人的运动轨迹提高机器人的工作效率,降低机器人生产成本。 关键词:六自由度机器人;运动分析;运动学;动力学;
目录 摘要 ...................................................................................................................... I Abstract ............................................................................... 错误!未定义书签。 1 绪论 (1) 1.1课题背景及研究的目的和意义 (1) 1.2机器人国内外发展现状及前景展望--------------------------1 2 六自由度机器人运动学分析 (3) 2.1六自由度机器人的结构-------------------------------------1 2.2运动学分析----------------------------------------------1 3 六自由度机器人动力学分析 (5) 3.1综述----------------------------------------------------3 3.2机器人动力学研究方法------------------------------------3 3.2.1几项假设-------------------------------------------3 3.2.2目标-----------------------------------------------4 3.2.3数学工具-------------------------------------------5 3.3动力学原理----------------------------------------------3 3.3.1动量矩定理---------------------------------------------------------------6 3.3.2能量守恒定理--------------------------------------6 3.3.3牛顿—欧拉方程------------------------------------7 3.3.4达朗贝尔原理--------------------------------------8 3.3.5拉格朗日方程--------------------------------------9 4 六自由度机器人运动分析 (8) 4.1运动分析的软件背景---------------------------------------3 4.2运用solidworks建立六度机器人机械臂三维模型--------------9 4.3运用Solidworks对进行运动学分析-------------------------4 5 结论 (14)
并联机器人发展现状与展望
并联机器人发展现状与展望 引言 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。本文根据掌握的大量并联机器人文献,对其分类和应用做了简要分析和概括,并对其在运动学、动力学、机构性能分析等方面的主要研究成果、进展以及尚未解决的问题进行了阐述。 1并联机构的发展概况 (一)并联机构的特点 并联机构是一种闭环机构,其动平台或称末端执行器通过至少2个独立的运动链与机架相联接,必备的要素如下:①末端执行器必须具有运动自由度;②这种末端执行器通过几个相互关联的运动链或分支与机架相联接;③每个分支或运动链由惟一的移动副或转动副驱动。 与传统的串联机构相比,并联机构的零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、伸缩杆件、滑块构件、虎克铰、球铰、伺服电机等通用组件组成。这些通用组件可由专门厂家生产,因而其制造和库存备件成本比相同功能的传统机构低得多,容易组装和模块化。 除了在结构上的优点,并联机构在实际应用中更是有串联机构不可比拟的优势。其主要优点如下: (1)刚度质量比大。因采用并联闭环杆系,杆系理论上只承受拉、压载荷,是典型的二力杆,并且多杆受力,使得传动机构具有很高的承载强度。 (2)动态性能优越。运动部件质量轻,惯性低,可有效改善伺服控制器的动态性能,使动平台获得很高的进给速度与加速度,适于高速数控作业。 (3)运动精度高。这是与传统串联机构相比而言的,传统串联机构的加工误差是各个关节的误差积累,而并联机构各个关节的误差可以相互抵消、相互弥补,因此,并联机构是未来机床的发展方向。 (4)多功能灵活性强。可构成形式多样的布局和自由度组合,在动平台上安装刀具进行多坐标铣、磨、钻、特种曲面加工等,也可安装夹具进行复杂的空间装配,适应性强,是柔性化的理想机构。 (5)使用寿命长。由于受力结构合理,运动部件磨损小,且没有导轨,不存在铁屑或冷却液进入导轨内部而导致其划伤、磨损或锈蚀现象。 并联机构作为一种新型机构,也有其自身的不足,由于结构的原因,它的运动空间较小,而串并联机构则弥补了并联机构的不足,它既有质量轻,刚度大,精度高的特点,又增大了机构的工作空间,因此具有很好的应用前景,尤其是少自由度串并联机构,适应能力强,且易于控制,是当前应用研究中的一个新热点。 (二)并联机构的分类 从运动形式来看,并联机构可分为平面机构和空间机构;细分可分为平面移动机构、平面移动转动机构、空间纯移动机构、空间纯转动机构和空间混合运动机构, 另可按并联机构的自由度数分类:
基于MATLAB的仿人焊接机械手运动学分析和仿真_王求
作者简介:王求(1978-),男,在读硕士研究生;研究方向为焊接机器人运动学,材料焊接及其数值模拟。 合肥工业大学材料科学与工程学院 王求 胡小建 李雷阵 摘 要:关键词:针对在狭小空间或密闭容器内以及危险作业环境中焊接的特殊要求,以UG软件为基础设计了一种仿人焊接 机械手。采用D-H方法建立了焊接机械手的运动学方程,并讨论了该机械手的运动学问题。然后运用MATLAB软件对机械手的运动学进行了仿真,通过仿真观察到机械手各个关节的运动,并得到所需的数据,说明了所设计参数的合理性和运动算法的正确性,为焊接机械手的动力学、控制及轨迹规划的研究提供了可靠的依据。焊接机械手;运动学;仿真;Matlab 基于MATLAB的仿人焊接机械手运动学分析和仿真 机器人技术作为信息技术和先进制造技术的典型代表和主要技术手段,已成为世界各发达国家竞相发展的高技术,其发展水平已经成为衡量一个国家技术发展水平的重要标志之一。焊接是制造业中最重要的工艺技术之一,它在机械制造、核工业、航空航天、能源交通、石油化工及建筑和电子等行业中的应用越来越广泛。从21世纪先进制造技术的发展要求来看,焊接自动化生产已是必然趋势,而焊接机器人是焊接自动化的革命性进步 。但是现阶段的焊接机器人都是具 有固定底座的机械手(臂),只能在固定位置完成一定范围内的操作,适应性较低。进行复杂苛刻条件(如小直径的容器内径中焊接)和危险环境(如有辐射等作业环境)中焊接作业时,要求可以代替人类从事焊接作业的机器人,而焊接机械手是实现焊接机器人的关键技术,因此设计出一种小型焊接机械手,可以作为仿人焊接机器人的执行末端,也可以直接作为 [1] [2] 焊接的执行末端,能代替焊工实现在狭小空间或者密闭容器内以及危险作业环境中的焊接。本文根据预定要求对焊接机械手进行机械结构设计,以UG软件进行造型,然后运用D-H坐标系理论为基础建模,讨论了机械手的运动学问题,并运用Matlab中的Ro-boticsToolbox完成了机械手的运动学仿真和轨迹规划。 机械手主要用于点焊或弧焊,其 末端载荷要求不高,能够承受焊枪质量即可,以抓持力1kg为依据进行设计。考虑机械手的工作条件,机械手本体质量小于10kg。机械手本体由基座、肩部、大臂、小臂、手腕、末端执行器所组成,共6个自由度,其中前3个自由度用于控制焊枪端部的空间位置,后3个自由度用于控制焊枪的空间姿态。机械手共6个关节,6个关节全部为转动关节,每个关节实现1个自由度,6个关节实现的运动分别是:1-肩部回转;2-大臂俯仰;3-小臂俯仰;4-小臂回转;5-手腕俯仰;6-手腕 [3] [4] 1焊接机械手结构设计 回转,如图1所示。根据机械手的设计要求,对机械手进行整体设计,使用UG软件进行机械手的三维建模,三维造型如图2所示。 机械手的运动学主要研究机械手 相对于固定参考系的运动,特别是研究机械手末端执行器位置和姿态与关节空间变量的关系。机械手运动学要 2运动学分析 [5]Analysis and simulation of kinesiology of simulated welding mechanical hand based on MATLAB
六轴运动机器人运动学求解分析
六轴联动机械臂运动学及动力学求解分析 V0.9版 随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。 作者朱森光 Email zsgsoft@https://www.360docs.net/doc/9f5089815.html, 完成时间 2016-02-28
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。本文内容的正确性经过笔者编程仿真验证可以信赖。 2机器建模 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。 3运动学分析 3.1齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 =cosθ0 s0 = sinθ0 //c0 R0 =[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0 s1 c1 0 0
基于MATLAB的六自由度工业机器人运动分析和仿真
基于MATLAB 的六自由度工业机器人运动分析及仿真 摘要: 以FANUC ARC mate100工业机器人为研究对象,对其机构和连杆参数进行分析,采用D-H 法对机器人进行正运动学和逆运动学分析,建立运动学方程。在MATLAB 环境下,运用机器人工具箱进行建模仿真,仿真结果证明了所建立的运动学正、逆解模型的合理性和正确性。 关键词:FANUC ARC mate100工业机器人; 运动学; MATLAB 建模仿真 1引言 工业机器人技术是在控制工程、人工智能、计算机科学和机构学等多种学科的基础上发展起来的一种综合性技术。经过多年的发展,该项技术已经取得了实质性的进步[1]。工业机器人的发展水平随着科技的进步和工业自动化的需求有了很大的提高,同时工业机器人技术也得到了进一步的完善。工业机器人的运动学分析主要是通过工业机器人各个连杆和机构参数,以确定末端执行器的位姿。工业机器人的运动学分析包括正运动学分析和逆运动学分析。 随着对焊接件要求的提高,弧焊等机器人的需求越来越多。本文就以FANUC ARC mate100机器人为研究对象,通过分析机构和连杆参数,运用D-H 参数法建立坐标系,求出连杆之间的位姿矩阵,建 立工业机器人运动学方程。并在MATLAB 环境下, 利用RoboticsToolbox 进行建模仿真。 2 FANUC ARC mate100 D-H 坐标系的建立mate100是FANUC 公司生产的6自由度工业机器人,包括底座、机身、臂、手腕和末端执行器,每个自由度对应一个旋转关节,如图1所示。 图1FANUC ARC mate 100机器人三维模型 DENAVIT 和HARTENBERG 于1955年提出了一种为关节链中的每一个杆件建立坐标系的矩阵方法,即D-H 参数法,在机器人运动学分析得到了广泛运用。采用这种方法建立坐标系: (1) Z i 轴沿关节i +1的轴线方向。 (2) X i 轴沿Z i-1和Z i 轴的公法线方向,且指向背离Z i-1轴的方向。 (3) Y i 轴的方向必须满足Y i = Z i *X i ,使坐标系为右手坐标系。 按照上述方法,建立坐标系如图 2 所示。 J 4 J 3 J 5 J 2 J 1 J 6