一种 InSAR 干涉相位图的自适应滤波算法
收稿日期:2010?06?12
基金项目:国家自然科学基金资助项目(60802074,41001282);教育部新世纪优秀人才支持计划资助项目;中央高校基本科研业务费专项
资金资助项目(JY10000902011)
作者简介:郭 交(1984-),男,西安电子科技大学博士研究生,E?mail:jiao.g@https://www.360docs.net/doc/a12433559.html,.doi押10.3969/j.issn.1001?2400.2011.04.014
一种InSAR 干涉相位图的自适应滤波算法
郭 交,李真芳,刘艳阳,保 铮
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
摘要:提出了一种自适应的InSAR 干涉相位图滤波方法.干涉相位滤波算法的关键是独立同分布滤波
样本的选取,该方法以相位变化最小为准则,根据区域增长策略,在当前滤波像素的邻域空间内自适应
地选择滤波窗口,再在此窗口内进行复数平均得到滤波后的干涉相位值.以相位变化最小为准则进行滤
波样本的选取,使其满足独立同分布的条件,从而提高干涉相位滤波的性能.仿真数据和实测数据的处
理结果表明,该算法具有较好的滤波性能,能够充分保持干涉相位图像细节,并有效地去除噪声.
关键词:干涉合成孔径雷达;干涉相位图;相位滤波;自适应区域增长
中图分类号:TN957 文献标识码:A 文章编号:1001?2400(2011)04?0077?05
New adaptive noise suppressing method for interferometric phase images
GUO Jiao熏LI Zhenfang熏LIU Yanyang熏BAO Zheng
穴National Key Lab.of Radar Signal Processing熏Xidian Univ.熏Xi’an 710071熏China雪
Abstract押 This paper proposes a new adaptive noise suppressing method for interferometric phase images.The key point of noise filtering for interferometric phase images is the selection of the independent and identically distributed 穴i.i.d.雪samples.The proposed method determines filtering samples with the criterion of the minimum phase differences according to the region?growing strategy熏and then computes the filtered phase in the complex domain.Due to the minimum phase difference熏the proposed method selects the filtering samples that
obey the i.i.d.assumption more accurately熏thus improving the filtering performance.Finally熏experiments carried out on simulated and real data confirm that the proposed method possesses a better filtering performance and has the ability to suppres the noise effectively while maintaining the interferogram details adequately.
Key Words押 synthetic aperture radar interferometry 穴InSAR雪鸦interferogram鸦phase filtering鸦adaptive region growing 干涉合成孔径雷达(InSAR)是获取地面数字高程图(DEM)的重要遥感技术.它通过对同一地区获得的两幅相干SAR 复图像进行干涉处理,得到观测区域的三维地形图[1].干涉相位图滤波是InSAR 数据处理中的关键步骤之一,相位滤波性能直接影响后续的二维相位展开处理,最终影响DEM 的高程精度[2].因此,研究稳健的相位图滤波算法具有重要的应用价值.
干涉相位图的滤波算法总是假定滤波窗口内的样本点满足独立同分布的假设,这样得到的均值滤波结果在统计意义上才等于滤波相位的均值[3?4].然而,在InSAR 数据的实际处理中,由于受地形起伏的影响和滤波样本的限制(最优的滤波结果应该是集合平均,而不是通常处理中所采用的空间平均),位于滤波窗口内的数据样本不可能严格满足独立同分布,尤其在地形变化剧烈的地区,这必然会导致滤波结果偏离理想真值.
最原始的圆周均值滤波方法根据经验值选取固定的滤波窗口(例如形状为规则正方形,大小为7×7),2011年8月第38卷 第4期 西安电子科技大学学报(自然科学版)JOURNAL OF XIDIAN UNIVERSITY Aug.2011Vol.38 No.4
假设滤波窗口内的所有样本点满足独立同分布的假设,对滤波窗口内的样本进行平均来作为当前像素的估
计,不采取任何措施进行样本点的选取,所以滤波性能欠佳,尤其在条纹密集的区域.Lee等[4]人提出了一种自适应的窗口选择滤波算法,首先给定16个干涉条纹的模板,通过当前数据估计出干涉条纹的大致方向,再
在同一条纹方向所包含的区域内进行滤波作为当前像素的相位估计.武楠等[5]人对Lee滤波算法进行改进,通过计算条纹频率确定出条纹方向,再进行相位滤波.然而,实际中的干涉条纹密度和方向千变万化,利用上
述方法来估计条纹的大致方向存在很大的局限性.蔡斌等[6]人提出根据相干积累准则,自适应搜索滤波窗口,进而得到当前像素的相位估计值;由于搜索维数和运算量的限制,得到的滤波窗口仍然是具有固定形状
的,例如矩形.Vasile等[7?8]人提出利用SAR图像的幅度信息通过区域增长得到与当前像素具有同一分布的样本点,再对选取的样本求均值获得当前像素的相位估计.然而,SAR图像像素的幅度和相位本身并不存在
严格的对应关系,利用SAR图像的幅度信息来进行相位滤波,样本的选取存在一定的局限性.
基于滤波样本的选取策略,笔者提出了一种干涉相位图的自适应滤波算法.该算法的思路为:首先通过
相邻像素(例如3×3)粗略估计出当前像素点的相位值;再基于相位变化最小的准则,利用区域增长的策
略[9],自适应地选择滤波窗口;最后通过对所选取的样本点进行均值滤波,得到当前像素相位的准确估计.滤波窗口由当前区域的数据样本决定,并不局限于固定的形状和大小,使滤波样本更加满足同一分布,从而
提高相位滤波性能.
1摇算法原理
根据文献[4]的分析论证,干涉相位可以近似为加性噪声模型,即
ψz =ψ
x
+n ,(1)
其中,ψz为干涉相位的观测值;ψx为干涉相位真值;n为与信号无关的加性噪声,其均值为零,方差为σn.由于复数信号对相位的周期性,干涉相位图中的相位值只能以主值的形式出现在区间[-π,π)内,表现为条纹状,这是干涉相位图最明显的特点.由于相位的圆周期性,不能直接用通常的平滑滤波来对干涉相位图进行噪声抑制,而必须采用能够保持相位跳变的滤波器.基于干涉相位对应的向量在复平面内是连续变化的,因此,文中方法对干涉相位图的滤波是在复数域上进行的[4,10].
在InSAR处理中,SAR图像之间的相干性直接决定了干涉测高的精度.而相干性会受到各种去相干因素的影响,包括热噪声二时间去相干二基线去相干和数据处理误差去相干等.Just等分析了干涉相位在散射系数满足圆高斯白噪声假设条件下的概率密度函数,对各种去相干因素对干涉相位精度的影响作了量化分析[11].Lee等进一步研究了多视情况下InSAR图像的强度和相位统计特性,给出的干涉相位概率密度函数的解析表达式[4]为
p
φ0(φ0)=ΓL+1
()2(1-ρ2)Lβ
2π1/2Γ(L)(1-β2)L+1/2+
(1-ρ2)L
2πF L,1;12;β
()2 ,(2)
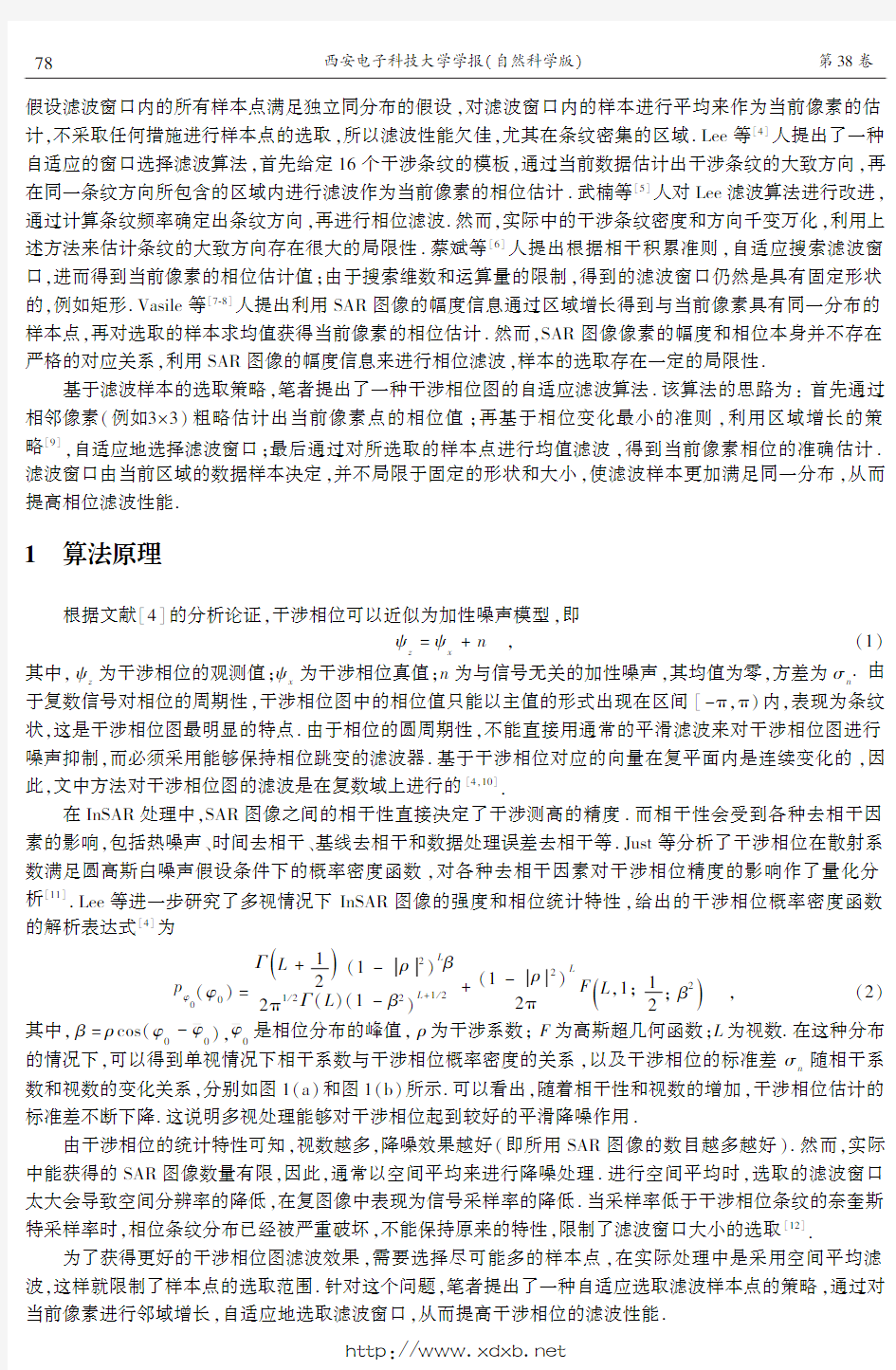
其中,β=ρcos(φ0-?φ0),?φ0是相位分布的峰值,ρ为干涉系数;F为高斯超几何函数;L为视数.在这种分布的情况下,可以得到单视情况下相干系数与干涉相位概率密度的关系,以及干涉相位的标准差σn随相干系数和视数的变化关系,分别如图1(a)和图1(b)所示.可以看出,随着相干性和视数的增加,干涉相位估计的标准差不断下降.这说明多视处理能够对干涉相位起到较好的平滑降噪作用.
由干涉相位的统计特性可知,视数越多,降噪效果越好(即所用SAR图像的数目越多越好).然而,实际中能获得的SAR图像数量有限,因此,通常以空间平均来进行降噪处理.进行空间平均时,选取的滤波窗口太大会导致空间分辨率的降低,在复图像中表现为信号采样率的降低.当采样率低于干涉相位条纹的奈奎斯特采样率时,相位条纹分布已经被严重破坏,不能保持原来的特性,限制了滤波窗口大小的选取[12].
为了获得更好的干涉相位图滤波效果,需要选择尽可能多的样本点,在实际处理中是采用空间平均滤波,这样就限制了样本点的选取范围.针对这个问题,笔者提出了一种自适应选取滤波样本点的策略,通过对当前像素进行邻域增长,自适应地选取滤波窗口,从而提高干涉相位的滤波性能.
87 西安电子科技大学学报(自然科学版) 第38卷
图1
干涉相位的统计特性
图2 自适应选择滤波窗口示意图
笔者提出的自适应干涉相位滤波算法通过对当前待估计像
素的邻域(例如3×3)进行平均,获得当前像素相位的粗略估计;
然后在一个给定的固定邻域(例如15×15)内,依照一定准则进行
区域增长,逐步扩大滤波样本的选择范围;通过迭代运算,最终获
得当前像素的滤波窗口.此算法的关键在于如何通过一定的增长
策略选择合适的滤波样本.
由干涉相位噪声的统计模型得出如下结论:对于相干系数
越大的区域,干涉相位值的分布更加集中,即越趋向于相位真值.
因此,进行邻域增长必须考虑当前区域的相干性.
图2中心像素为当前待估计像素.假设待增长的像素值为A m exp(j φm )(m =1,2,3, )二相干系数为ρm ,由当前邻域得到的中心像素粗略估计值为A e exp(j φe )二相干系数均值为ρe ,那么,如果滤波窗口进行更新,则待增长像素与粗略估计值之间的相位差为θm =arg 1+A e exp(j φe )A m exp(j φm ?è???÷) , m =1,2,3, ,(3)相干系数估计值为^ρm =N 四ρe +ρm N +1
, m =1,2,3, ,(4)其中,arg(四)和四分别为取相角和取绝对值运算;N 为当前滤波窗口的大小,即当前滤波窗口内所包含的样本数目.根据干涉相位的统计特性,可以由相干系数的估计值^ρm 确定其干涉相位均方差^σm
.文中算法以待增长像素与粗略估计值之间的相位差为准则来引导邻域增长的路径,将具有最小相位差的像素包含到当前邻域中,对当前邻域进行更新,然后通过迭代运算对滤波窗口进行区域增长.
需要指出的是,上述算法以两个条件作为迭代中止的条件,即待增长像素的相位差和滤波窗口的大小:如果待增长像素的相位差大于一个门限值(例如3^σm
),或者滤波窗口内的样本点数达到一定数目(例如35个样本),则退出迭代.因为当前待增长像素的相位差过大时,则认为此点已经不具有独立同分布的特性,因此滤波窗口内必须排除此样本点.
2摇算法流程
笔者提出的干涉相位自适应滤波算法的流程图如图3所示.具体分为如下几步:(1)对干涉相位图中的像素(i ,j ),设定其初始滤波窗口(例如3×3)和滤波窗口界限(例如15×15);(2)对当前滤波窗口内的像素求取均值,作为像素(i ,j )的当前估计值;m 以及相干系数的估
9
7第4期 郭 交等:一种InSAR 干涉相位图的自适应滤波算法
图3 自适应滤波算法流程图计值^ρm ,并由干涉相位统计特性得到干涉相位均方差^σm
;(4)在当前滤波窗口的周围像素中,选择与估计值的相位差最小的某个像素作为当前待增长像素;(5)如果滤波窗口内的样本点数目小于一个设定值
(例如35个样本),且θi <3σn ,e ,则更新当前邻域,跳至步
骤(2)进行迭代运算;否则中止迭代,转至步骤(6);
(6)对当前获得的滤波窗口内的所有样本点进行复数平均,得到像素(i ,j )的干涉相位估计值.
3摇性能分析
利用仿真数据和实测数据对文中算法的滤波性能进行
分析.
3.1 对仿真数据进行处理
仿真数据描述如下:假定卫星InSAR 系统(类似于
TanDEM?X 系统),垂直航向有效基线长度为813.5m,卫星
高度为600km,下视角为45°,SAR 图像的信噪比(SNR)为
23dB,仿真地形为美国航天飞机雷达地形测绘任务(SRTM)获得的DEM 图(河北省的部分地区).SAR 图像分辨率为
3m×3m.按照统计模型生成两颗卫星接收的SAR 图像数据
.图4 仿真数据的处理结果对比
对两幅SAR 图像进行传统的InSAR 处理(包括预滤波二图像配准和平地相位去除),生成带有噪声的干涉条纹图,其采样点数为900×600.对干涉条纹图的滤波结果如图4所示.其中图4(h)~图4(l)分别为各种滤波算法的结果与理想干涉相位之间的相位误差.从图4中的滤波结果可以看出,采用固定滤波窗二Vasile 方法和Lee 滤波算法产生的误差较大,尤其在条纹密集的区域,而文中算法具有较小的误差,能够充分保持
08 西安电子科技大学学报(自然科学版) 第38卷
干涉相位图的细节信息.利用滤波结果与理想的相位误差和剩余残点来定量描述各种算法的滤波性能,对比结果见表1.从对仿真数据的处理结果可以看出,文中算法具有较好的性能.
表1 滤波算法性能比较
固定窗7×7
固定窗13×13Vasile 方法Lee 滤波文中方法相位误差/rad
0.2630.2320.2430.3270.162残点剩余量27018423562292
3.2 对实测数据进行处理
文中所采用的实测数据为X?SAR 录取的意大利Etna 火山口的数据,截取其中局部区域(大小为300×
450)经过传统的干涉处理,包括预滤波二图像配准和平地相位去除,生成了带噪的干涉相位图.由于无法获得实际数据的理想干涉相位图,这里只给出了直观的对比结果
.图5 实测数据的处理结果对比
图5为对实测数据的干涉相位图的滤波结果.对滤波结果的残差点进行统计,得到各种滤波算法结果对应的残差点剩余量分别为745二840二806二859和205.从图5的滤波结果和对剩余残点的统计结果可以看出,文中算法具有较好的性能,能够在充分保持干涉条纹图的细节信息的前提下,对噪声进行有效抑制.4摇结束语
提出了一种干涉相位图的自适应滤波算法.该算法依据相位变化最小的准则,利用区域增长的策略,自适应地调节滤波窗口的大小和形状.仿真数据和实测数据的处理结果表明:该算法能够根据地形起伏和干涉相位图质量,自适应地选择干涉相位滤波窗口,具有较好的滤波性能,能够在充分保持图像细节的同时,有效地去除噪声.
参考文献:
眼1演
Rosen P A熏Hensley S熏Joughin I R熏et al.Synthetic Aperture Radar Interferometry眼J演.Proc of the IEEE熏2000熏88穴3雪押333?382.眼2演
Costantini M.A Novel Phase Unwrapping Method Based on Network Programming眼J演.IEEE Trans on GRS熏1998熏36穴3雪押813?
821.眼3演严卫东熏倪维平熏赵亦工熏等.自适应的改进Goldstein 干涉相位图滤波算法眼J演.西安电子科技大学学报.2010熏37穴2雪押248?259.Yan Weidong熏Ni Weiping熏Zhao Yigong熏et al.Auto?adaptive Filtering of the InSAR Interferometric Phase Based on the Modification Goldstein Algorithm眼J演.Journal of Xidian University熏2010熏37穴2雪押248?259.(下转第88页)
18第4期 郭 交等:一种InSAR 干涉相位图的自适应滤波算法
自适应滤波LMS算法及RLS算法及其仿真.
自适应滤波 第1章绪论 (1) 1.1自适应滤波理论发展过程 (1) 1.2自适应滤波发展前景 (2) 1.2.1小波变换与自适应滤波 (2) 1.2.2模糊神经网络与自适应滤波 (3) 第2章线性自适应滤波理论 (4) 2.1最小均方自适应滤波器 (4) 2.1.1最速下降算法 (4) 2.1.2最小均方算法 (6) 2.2递归最小二乘自适应滤波器 (7) 第3章仿真 (12) 3.1基于LMS算法的MATLAB仿真 (12) 3.2基于RLS算法的MATLAB仿真 (15) 组别:第二小组 组员:黄亚明李存龙杨振
第1章绪论 从连续的(或离散的)输入数据中滤除噪声和干扰以提取有用信息的过 程称为滤波。相应的装置称为滤波器。实际上,一个滤波器可以看成是 一个系统,这个系统的目的是为了从含有噪声的数据中提取人们感兴趣的、 或者希望得到的有用信号,即期望信号。滤波器可分为线性滤波器和非 线性滤波器两种。当滤波器的输出为输入的线性函数时,该滤波器称为线 性滤波器,当滤波器的输出为输入的非线性函数时,该滤波器就称为非线 性滤波器。 自适应滤波器是在不知道输入过程的统计特性时,或是输入过程的统计特性发生变化时,能够自动调整自己的参数,以满足某种最佳准则要求的滤波器。 1.1自适应滤波理论发展过程 自适应技术与最优化理论有着密切的系。自适应算法中的最速下降算法以及最小二乘算法最初都是用来解决有/无约束条件的极值优化问题的。 1942年维纳(Wiener)研究了基于最小均方误差(MMSE)准则的在可加性噪声中信号的最佳滤波问题。并利用Wiener.Hopf方程给出了对连续信号情况的最佳解。基于这~准则的最佳滤波器称为维纳滤波器。20世纪60年代初,卡尔曼(Kalman)突破和发展了经典滤波理论,在时间域上提出 了状态空间方法,提出了一套便于在计算机上实现的递推滤波算法,并且适用于非平稳过程的滤波和多变量系统的滤波,克服了维纳(Wiener)滤波理论的局限性,并获得了广泛的应用。这种基于MMSE准则的对于动态系统的离散形式递推算法即卡尔曼滤波算法。这两种算法都为自适应算法奠定了基础。 从频域上的谱分析方法到时域上的状态空间分析方法的变革,也标志 着现代控制理论的诞生。最优滤波理论是现代控制论的重要组成部分。在控制论的文献中,最优滤波理论也叫做Kalman滤波理论或者状态估计理论。 从应用观点来看,Kalman滤波的缺点和局限性是应用Kalman滤波时要求知道系统的数学模型和噪声统计这两种先验知识。然而在绝大多数实际应用问题中,它们是不知道的,或者是近似知道的,也或者是部分知道的。应用不精确或者错误的模型和噪声统计设计Kalman滤波器将使滤波器性能变坏,导致大的状态估计误差,甚至使滤波发散。为了解决这个矛盾,产生了自适应滤波。 最早的自适应滤波算法是最小JY(LMS)算法。它成为横向滤波器的一种简单而有效的算法。实际上,LMS算法是一种随机梯度算法,它在相对于抽头权值的误差信号平方幅度的梯度方向上迭代调整每个抽头权 值。1996年Hassibi等人证明了LMS算法在H。准则下为最佳,从而在理论上证明了LMS算法具有孥实性。自Widrow等人1976年提出LMs自适应滤波算法以来,经过30多年的迅速发展,已经使这一理论成果成功的应用到通信、系统辨识、信号处理和自适应控制等领域,为自适应滤波开辟了新的发展方向。在各种自适应滤波算法中,LMS算法因为其简单、计算量小、稳定性好和易于实现而得到了广泛应用。这种算法中,固定步长因子μ对算法的性能有决定性的影响。若μ较小时,算法收敛速度慢,并且为得到满意的结果需要很多的采样数据,但稳态失调误差
相位解缠算法研究
一、引言 合成孔径雷达干涉测量技术(synthetic aperture radar interferometry, InASR)将合成孔径雷达成像技术与干涉测量技术成功地进行了结合,利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,可以精确的测量出图像上每一点的三维位置和变化信息。 合成孔径雷达干涉测量技术是正在发展中的极具潜力的微波遥感新技术,其诞生至今已近30年。起初它主要应用于生成数字高程模型(DEM)和制图,后来很快被扩展为差分干涉技术( differential InSAR , DInSAR)并应用于测量微小的地表形变,它已在研究地震形变、火山运动、冰川漂移、城市沉降以及山体滑坡等方面表现出极好的前景。特别,DInSAR具有高形变敏感度、高空间分辨率、几乎不受云雨天气制约和空中遥感等突出的技术优势,它是基于面观测的空间大地测量新技术,可补充已有的基于点观测的低空间分辨率大地测量技术如全球定位系统(GPS)、甚长基线干涉(VLBI)和精密水准等。尤其InSAR在地球动力学方面的研究最令人瞩目。 二维相位解缠是InSAR 数据处理流程中重要步骤之一,也是主要误差来源,无论是获取数字高程模型还是获取地表形变信息,其精确程度都高度依赖于有效的相位解缠。因此,本人在课程期间对相位解缠的相关文献进行了阅读。 二、InSAR基本原理
用两副雷达天线代替两个光源1S ,2S ,对地面发射相干信号,将 得到类似的条纹图。因为雷达信号与光线本质上都是电磁波,所以只要保证雷达天线载具运行轨道的稳定,那么两个信号到达地面上某一点处的路程差是确定的,只与该点在地面上的位置有关。在 InSAR 干涉测量中有两种模式,一种是在载具(卫星或飞机)上搭载一具天线,而载具两次通过不同轨道航线飞经目标地域上空,此种称之为单天线双航过模式;另一种在载具上搭载两副天线,只飞经目标地域上空一次,此种方式称之为双天线单航过模式。不论是哪种方式都可以用图 2.2 来模拟并作出几何解释。 在测量中两副天线或两次航过接收的数据可以各获得对地面同一区域的两幅包含幅值与相位信息的二维复数据图像,分别以1S ,2S 表示为 111114||exp()||exp()j r S S S π?λ==
相位恢复问题研究
Pure Mathematics 理论数学, 2019, 9(3), 330-335 Published Online May 2019 in Hans. https://www.360docs.net/doc/a12433559.html,/journal/pm https://https://www.360docs.net/doc/a12433559.html,/10.12677/pm.2019.93044 Research on Phase Retrieval Problem Gan Gong, Huimin Wang*, Qian Wu, Yunyang Lu Department of Applied Statistics, Shaoxing University, Shaoxing Zhejiang Received: Apr. 23rd, 2019; accepted: May 3rd, 2019; published: May 15th, 2019 Abstract Phase retrieval is an important issue in the field of engineering physics, studying how to estimate a signal from its Fourier transform magnitude. Generally speaking, this problem is ill-posed. Therefore, to recover the signal accurately, some a priori information of the signal is needed. Very rich research results have emerged in the phase recovery problem. This paper will review the lat-est theories and algorithms of sparse phase recovery. Keywords Sparsity, Phase Retrieval, Iterative Algorithm, Nonconvex Optimization 相位恢复问题研究 龚敢,王会敏*,邬谦,卢云洋 绍兴文理学院,应用统计系,浙江绍兴 收稿日期:2019年4月23日;录用日期:2019年5月3日;发布日期:2019年5月15日 摘要 相位恢复问题是工程物理领域的一个重要的问题,研究如何从一个傅立叶测量的模中估计一个信号。一般来说,这个问题是病态的,因此,要准确恢复信号,需要信号的一些先验信息。关于相位恢复问题已经涌现了非常丰富的研究成果,本文将对稀疏相位恢复问题最新的理论和算法进展进行综述。 关键词 稀疏性,相位恢复,迭代算法,非凸优化 *通讯作者。
偏振光干涉中的相位
偏振光干涉中o 光和e 光的相位 以课件上的问题为例: 设单色平面光波沿z 方向传播,即k //z : 1. 在偏振片P 1之后,晶片C 之前的光场是: )2cos(11z t e A E P λ πω?=r r 现在事先把它分解为o 光和e 光: )2cos( )()2cos()(11e e 1o o 1z t e e e A z t e e e A E P P λ πωλπω??+??=r r r r r r r (1) 这里1P e r 是沿偏振片P 1的偏振方向的单位矢量,o e r 和e e r 是o 光和e 光偏振方向的单位矢量,。上图表示出了所有的单位矢量,它们都在x -y 平面内。原则上讲,这些单位矢量的方向是可任意规定的,影响的只是它们之间点积的正负,但为了保证现在的o 光和e 光没有相位差,即cos 函数内不出现π(如果o e r 沿图中的反方向定义, 就会引起这个π),则o e r 、e e r 与1P e r 应保持上图所示关系。在上图的规定中,αcos )(1e =?P e e r r ,αsin )(1o =?P e e r r 。 2. 在晶片C 之后,偏振片P 2之前的光场是: )2cos()()2cos()(11e e 1o o 1z t e e e A z t e e e A E P P λ πωδλπω??++??=r r r r r r r (2) 与(1)式不同的是,(2)式中的o 光和e 光有了相位差δ,这是由晶片引起的。这时一般 y z k x
合成为椭圆偏振光。 3. 在偏振片P 2之后的光场是(对o 光和e 光,只有沿P 2方向的分量可通过): ) 2cos())(()2cos())((212212e e 1o o 1z t e e e e e A z t e e e e e A E P P P P P P λπωδλπω???++???=r r r r r r r r r r r 这时的情况是:振动都沿同方向-2P e r 方向的、相差恒定的两个波叠加,故可产生干涉。 具体分析相位,除了由晶片引起的δ,还存在可能由光矢量分解引起的π,表现在)(2o P e e r r ?和)(2e P e e r r ?差负号。在上面的情形中,的确引入了π的相位差。
自适应滤波器设计与Matlab实现
自适应滤波器:根据环境的改变,使用自适应算法来改变滤波器的参数和结构。这样的滤波器就称之为自适应滤波器。 数学原理编辑 以输入和输出信号的统计特性的估计为依据,采取特定算法自动地调整滤波器系数,使其达到最佳滤波特性的一种算法或装置。自适应滤波器可以是连续域的或是离散域的。离散域自适应滤波器由一组抽头延迟线、可变加权系数和自动调整系数的组成。附图表示一个离散域自适应滤波器用于模拟未知离散系统的信号流图。自适应滤波器对输入信号序列x(n)的每一个样值,按特定的算法,更新、调整加权系数,使输出信号序列y(n)与期望输出信号序列d(n)相比较的均方误差为最小,即输出信号序列y(n)逼近期望信号序列d(n)。 20世纪40年代初期,N.维纳首先应用最小均方准则设计最佳线性滤波器,用来消除噪声、预测或平滑平稳随机信号。60年代初期,R.E.卡尔曼等发展并导出处理非平稳随机信号的最佳时变线性滤波设计理论。维纳、卡尔曼-波色滤波器都是以预知信号和噪声的统计特征为基础,具有固定的滤波器系数。因此,仅当实际输入信号的统计特征与设计滤波器所依据的先验信息一致时,这类滤波器才是最佳的。否则,这类滤波器不能提供最佳性能。70年代中期,B.维德罗等人提出自适应滤波器及其算法,发展了最佳滤波设计理论。 以最小均方误差为准则设计的自适应滤波器的系数可以由维纳-霍甫夫方程解得 式中W(n)为离散域自适应滤波器的系数列矩阵(n)为输入信号序列x(n)的自相关矩阵的逆矩阵,Φdx(n)为期望输出信号序列与输入信号序列x(n)的互相关列矩阵。 B.维德罗提出的一种方法,能实时求解自适应滤波器系数,其结果接近维纳-霍甫夫方程近似解。这种算法称为最小均方算法或简称 LMS法。这一算法利用最陡下降法,由均方误差的梯度估计从现时刻滤波器系数向量迭代计算下一个时刻的系数向量 式中憕【ε2(n)】为均方误差梯度估计, k s为一负数,它的取值决定算法的收敛性。要求,其中λ为输入信号序列x(n)的自相关矩阵最大特征值。 自适应 LMS算法的均方误差超过维纳最佳滤波的最小均方误差,超过量称超均方误差。通常用超均方误差与最小均方误差的比值(即失调)评价自适应滤波性能。
自适应滤波算法的研究分析
自适应滤波算法的研究 第1章绪论 1.1课题背景 伴随着移动通信事业的飞速发展,自适应滤波技术应用的范围也日益扩大。早在20世纪40年代,就对平稳随机信号建立了维纳滤波理论。根据有用信号和干扰噪声的统计特性(自相关函数或功率谱),用线性最小均方误差估计准则设计的最佳滤波器,称为维纳滤波器。这种滤波器能最大程度地滤除干扰噪声,提取有用信号。但是,当输入信号的统计特性偏离设计条件,则它就不是最佳的了,这在实际应用中受到了限制。到60年代初,由于空间技术的发展,出现了卡尔曼滤波理论,即利用状态变量模型对非平稳、多输入多输出随机序列作最优估计。现在,卡尔曼滤波器己成功地应用到许多领域,它既可对平稳的和非平稳的随机信号作线性最佳滤波,也可作非线性滤波。实质上,维纳滤波器是卡尔曼滤波器的一个特例。 在设计卡尔曼滤波器时,必须知道产生输入过程的系统的状态方程和测量方程,即要求对信号和噪声的统计特性有先验知识,但在实际中,往往难以预知这些统计特性,因此实现不了真正的最佳滤波。 Widrow B等于1967年提出的自适应滤波理论,可使自适应滤波系统的参数自动地调整而达到最佳状况,而且在设计时,只需要很少的或根本不需要任何关于信号与噪声的先验统计知识。这种滤波器的实现差不多象维纳滤波器那样简单,而滤波性能几乎如卡尔曼滤波器一样好。因此,近十几年来,自适应滤波理论和方法得到了迅速发展。[1] 自适应滤波是一种最佳滤波方法。它是在维纳滤波,Kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能。从而在工程实际中,尤其在信息处理技术中得到广泛的应用。 自适应滤波的研究对象是具有不确定的系统或信息过程。“不确定”是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因数和随机因数。
自适应滤波器毕业设计论文
大学 数字信号处理课程要求论文 基于LMS的自适应滤波器设计及应用 学院名称: 专业班级: 学生姓名: 学号: 2013年6月
摘要自适应滤波在统计信号处理领域占有重要地位,自适应滤波算法直接决定着滤波器性能的优劣。目前针对它的研究是自适应信号处理领域中最为活跃的研究课题之一。收敛速度快、计算复杂性低、稳健的自适应滤波算法是研究人员不断努力追求的目标。 自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。研究自适应滤波器可以去除输出信号中噪声和无用信息,得到失真较小或者完全不失真的输出信号。本文介绍了自适应滤波器的理论基础,重点讲述了自适应滤波器的实现结构,然后重点介绍了一种自适应滤波算法最小均方误差(LMS)算法,并对LMS算法性能进行了详细的分析。最后本文对基于LMS算法自适应滤波器进行MATLAB仿真应用,实验表明:在自适应信号处理中,自适应滤波信号占有很重要的地位,自适应滤波器应用领域广泛;另外LMS算法有优也有缺点,LMS算法因其鲁棒性强特点而应用于自回归预测器。 关键词:自适应滤波器,LMS算法,Matlab,仿真
1.引言 滤波技术在当今信息处理领域中有着极其重要的应用。滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过;而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。Wiener于20世纪40年代提出了最佳滤波器的概念,即假定线性滤波器的输入为有用信号和噪音之和,两者均为广义平稳过程且己知他们的二阶统计过程,则根据最小均方误差准则(滤波器的输出信号与期望信号之差的均方值最小)求出最佳线性滤波器的参数,称之为Wiener滤波器。同时还发现,在一定条件下,这些最佳滤波器与Wiener滤波器是等价的。然而,由于输入过程取决于外界的信号、干扰环境,这种环境的统计特性常常是未知的、变化的,因而不能满足上述两个要求,设计不出最佳滤波器。这就促使人们开始研究自适应滤波器。自适应滤波器由可编程滤波器(滤波部分)和自适应算法两部分组成。可编程滤波器是参数可变的滤波器,自适应算法对其参数进行控制以实现最佳工作。自适应滤波器的参数随着输入信号的变化而变化,因而是非线性和时变的。 2. 自适应滤波器的基础理论 所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。所谓“最优”是以一定的准则来衡量的,最常用的两种准则是最小均方误差准则和最小二乘准则。最小均方误差准则是使误差的均方值最小,它包含了输入数据的统计特性,准则将在下面章节中讨论;最小二乘准则是使误差的平方和最小。 自适应滤波器由数字结构、自适应处理器和自适应算法三部分组成。数字结构是指自适应滤波器中各组成部分之间的联系。自适应处理器是前面介绍的数字滤波器(FIR或IIR),所不同的是,这里的数字滤波器是参数可变的。自适应算法则用来控制数字滤波器参数的变化。 自适应滤波器可以从不同的角度进行分类,按其自适应算法可以分为LMS自适应滤波
实验六 相位干涉仪测向技术
学 院 通信工程学院 专 业 信息对抗技术 指导教师 沈雷老师/孙闽红老师 学生姓名 邓斌 学 号 11073115 实验日期 2014.05. 实验六 相位干涉仪测向技术 一、实验目的 无线电测向和定位就是确定通信辐射源的来波方向和位置。对通信信号的测向和定位是通信侦察对抗领域的一个重要且相对独立的技术领域。干涉仪测向又称为相位法测向。本实验主要目的为通过实验,了解并掌握通信测向中相位法测向的基本原理和方法。 二、实验原理 1、相位干涉仪测向原理 图 1 以单基线干涉仪测向为例,其电波到达相邻天线阵元形成的波程差如上图所示。图中测向天线阵由两个阵元组成,假设辐射源与阵元相距很远,所以可认为辐射源发射到阵元1和2的信号平行。假设阵元1和阵元2之间的间距为d ,来波方向与阵列法线方向的夹角为θ。测向的实质是测量夹角θ。 阵元1和阵元2接收到的信号传播存在波程差,因而也存在相位差。设阵元1接收信号为 20()()cos(2)r t s t E f t π== 则阵元2的接收信号为 102sin ()()cos(2)d r t s t E f t πθ τπλ =-=- 其中0/c f λ=为信号波长。 从上可以看出,信号传播距离差为θsin ?=?d l ,则相位差为:
λθπ?/sin 2??=?d 实际中d 、λ均已知,所以只要得到阵元1和2接收信号的相位差,便可以求出θ。需要注意的是,为了避免相位模糊问题,常需要满足条件π?
自适应滤波器的dsp实现
学号: 课程设计 学院 专业 年级 姓名 论文题目 指导教师职称 成绩 2013年 1 月 10 日
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (1) 1 自适应滤波器原理 (2) 2 自适应滤波器算法 (3) 3 自适应滤波算法的理论仿真与DSP实现 (5) 3.1 MATLAB仿真 (5) 3.2 DSP的理论基础 (7) 3.3 自适应滤波算法的DSP实现 (9) 4 结论 ............................................... 错误!未定义书签。致谢 ................................................. 错误!未定义书签。参考文献 ............................................. 错误!未定义书签。
自适应滤波器算法的DSP实现 学生姓名:学号: 学院:专业: 指导教师:职称: 摘要:本文从自适应滤波器的基本原理、算法及设计方法入手。本设计最终采用改进的LMS算法设计FIR结构自适应滤波器,并采用MATLAB进行仿真,最后用DSP 实现了自适应滤波器。 关键词:DSP(数字信号处理器);自适应滤波器;LMS算法;FIR结构滤波器 DSP implementation of the adaptive filter algorithm Abstract:In this article, starting from the basic principles of adaptive filter and algorithms and design methods. Eventually the design use improved the LMS algorithm for FIR adaptive filter,and use MATLAB simulation, adaptive filter using DSP. Key words:DSP;adaptive filter algorithm;LMS algorithm;FIR structure adaptive filter 引言 滤波是电子信息处理领域的一种最基本而又极其重要的技术。在有用信号的传输过程中,通常会受到噪声或干扰的污染。利用滤波技术可以从复杂的信号中提取所需要的信号,同时抑制噪声或干扰信号,以便更有效地利用原始信号。滤波器实际上是一种选频系统,它对某些频率的信号予以很小的衰减,让该部分信号顺利通过;而对其他不需要的频率信号则予以很大的衰减,尽可能阻止这些信号通过。在电子系统中滤波器是一种基本的单元电路,使用很多,技术也较为复杂,有时滤波器的优劣直接决定产品的性能,所以很多国家非常重视滤波器的理论研究和产品开发[1]。近年来,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波。 自适应滤波器是统计信号处理的一个重要组成部分。在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此我们需要研究自适应滤波器。凡是需要处理未知统计环境下运算结果所产生的信
相位干涉仪测向
相位干涉仪测向 07083115 07083119 一、 题目要求 使用Simulink 模拟构建一个相位测向系统, 构造两个有时延的到来信号,对其进行捕获,分别在时域和频域上对接收的信号进行方向估计,并评估侧向效果。 二、 实验方案及公式推导 A. 公式推导 图 1 信号为0()cos(2)s t E f t π=,则如图 1所示天线长为d,信号方向与参考方向夹角为θ 设2点的接收信号为20()()cos(2)r t s t E f t π== (1) 则1点的接收信号为102sin ()()cos(2) d r t s t E f t πθ τπλ =-=- (2) 其中0 c f λ= 为信号波长 ①时域测向 将12(),()r t r t 改写为复数形式得 022()j f t r t Ee π= (3) 21()j f t r t Ee π?-= (4) 其中2sin d πθ ?λ =- 对(3)式取共轭得, 0 2*2()j f t r t Ee π-= (5) (4)式与(5)式相乘得, *212()()j r t r t E e ?-= (6)
对(6)式求相角,乘以2d λ π-得, sin 2d ?λ θ π= (7) 取反正弦,乘以0 180 π ,求出 θ ②频域测向 将(3)、(4)作FFT 得, 20()()R w E f f δ=- (8) 10()()j R w E f f e ? δ-=- (9) 由公式 ()arctan () I Q R k R k θ= 求出 2121()()arctan arctan () () I I Q Q R k R k R k R k ?=- (10) 同① ,可求出 θ B.方案论述 一、伯努利二进制码流经BPSK 产生2()r t 二、产生12()()j r t r t e ?-= 三、①时域法:*12()()r t r t 取出? ②频域法:对12(),()r t r t 作FFT,求出相位差? 四、根据?的值对应求出θ 三、Simulink 框图说明及参数设计: 依据方案的设计,建立Simulink 仿真模型 A.框图模块说明 : 相乘器 相加器 二进制数据流 高斯白噪声信道
基于自适应稀疏表示的压缩感知及相位恢复算法研究
基于自适应稀疏表示的压缩感知及相位恢复算法研究 高效地获取、处理及传输信息对于科技进步至关重要。作为信息的载体,图像在传统采集过程中通常需要以高采样频率采样才能够被完美重建。然而,较多的测量数据既增加了采样端的复杂性,又给数据的传输、处理与存储增加了压力。如何利用少量测量数据重建高质量图像是一大挑战。 为解决该问题,本文利用自适应稀疏表示技术研究从信息缺失严重的测量数据中重建高质量图像的算法,重点研究有效的压缩感知核磁共振成像(Compressed Sensing Magnetic Resonance Imaging,CSMRI)与相位恢复(Phase Retrieval,PR)算法。具体研究内容及创新性成果如下:首先,为解决现有CSMRI 算法在低采样率下重建质量低的问题,提出基于一阶逼近字典学习的CSMRI算法及融合局部稀疏性、即插即用先验的CSMRI算法。字典学习方法在图像重建中至关重要,本文对传统字典学习代价函数中的字典与系数的乘积项进行一阶逼近提出了能够有效捕获图像信息的一阶逼近字典学习方法。此外,利用该方法提出了有效的CSMRI算法。 根据图像与其去噪结果应尽可能接近的原理,构建了即插即用正则化模型。将该模型引入到基于一阶逼近字典学习的CSMRI中以利用多种先验知识进行图像重建,实验验证了算法的有效性。其次,为解决低过采样率下现有PR算法重建质量低的问题,提出了基于紧标架、自适应正交字典的PR算法。传统相位恢复的测量数据包含关于待重建图像较少的结构信息,为保证重建高质量图像需利用额外的先验信息进行重建。 为此,提出利用图像在TIHP(Translation Invariant Haar Pyramid)紧标架下的稀疏性进行相位恢复的算法。由于紧标架的非自适应性,上述算法在更低的过采样率下重建质量不高。为解决该问题,提出利用自适应字典进行相位恢复的算法。该算法将字典限制为正交结构以降低算法计算复杂度,通过傅里叶模值联合优化字典与图像,实验验证了算法的有效性。 再次,提出迁移正交稀疏变换学习算法,并利用该方法进行相位恢复。由于相位恢复的初始估计图像通常为随机的,初始迭代的估计图像包含大量噪声,将该估计图像的图像块作为训练样本不利于字典学习。为解决该问题,构造了稀疏变换正则项以衡量待学习稀疏变换与已知稀疏变换的相似性。提出迁移正交稀疏变
INSAR相位解缠方法比较分析
INSAR相位解缠方法比较分析 【摘要】合成孔径雷达干涉测量技术(Interferometric Synthetic Apeurtre Radar,简称InSAR)是近二十年发展起来的一种先进的空间观测技术,它通过对同一地区的两幅单视复数图像进行配准、干涉、去除平地效应、滤波、解缠、地理编码等一系列处理,最终获取DEM。相位解缠是InSAR数据处理的关键技术和难点,也是InSAR产品的主要误差源。本文选取相干性较好四组SAR影像对进行实验,借助于Mcrosoft visual C++6.0平台和Matlab平台,对六种最常用的解缠方法从解缠精度和效率两个方面来分析比较各种方法。 【关键词】InSAR;缠绕相位;相位解缠;误差 合成孔径雷达(Synthetic Apeurture Rada,简称SAR)是50年代末研制成功的一种微波传感器,也是微波传感器中发展最快、最有效的传感器之一。它是一种主动传感器,与其他测地技术相比,SAR具有不受光照以及恶劣天气等条件的影响,可进行全天时、全天候地对地观测,对地物具有一定穿透能力,分辨率不受传感器平台高度的影响等优点。因此,被广泛地应用于地质、环境、海洋、水文、灾害、测绘、农业、林业、气象和军事等领域。 早在1952年,美国Goodyear宇航公司便研制成功了第一个实用化的SAR 系统,1953年获得了第一幅机载SAR影像,到70年代中期机载SAR技术己经比较成熟,到了70年代末期星载SAR已经由实验研究转向了应用研究,进入80年代后,星载SAR得到了迅猛发展。我国1976年开始研制合成孔径雷达,1979年获取了我国第一批合成孔径雷达图像,1987我国研制了新一代机载合成孔径雷达系统,90年代初,中国研制出机载合成孔径雷达实时成像传送处理器,目前我国星载SAR系统也正在积极研究当中。 InSAR是基于SAR成像基础和干涉测量原理上的一种雷达主动成像遥感测量技术。它的原理是通过两副天线同时观测,或一定时间间隔的两次平行观测,获取同一景观的复图像对,由于目标与天线的几何关系,在复图像对上产生相位差,形成干涉图纹。干涉图包含了图像点与天线位置差的精确信息,干涉合成孔径雷达相位解缠算法利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,可以精确地测量出图像上每一点的三维位置。 InSAR干涉测量数据处理流程分为七个步骤,分别为:图像配准,配准完成后主图像和重采样的辅图像复共轭相乘,去平地效应,滤波处理,相位解缠,基线估计,生成DEM。其中,相位解缠是干涉数据处理过程中关键环节,直接影响数字高程模型(DEM)的精度。 由于三角函数的周期性,干涉图中各点的相位值只能落入主值(- ,]的范围内,所以干涉纹图中的相位只是真实相位的主值,要得到反映高程信息的真实相位值必须对每个相位值加上2 的整数倍,这个过程称为相位解缠。 相位解缠是InSAR数据处理中的重要环节,自20世纪70年代末至今人们已经发展了几十种相位解缠算法,这些算法可以分为三大类,第一类是以枝切法为代表的基于路径跟踪的相位解缠算法,它主要是通过沿着预先确定的一致性路径进行相邻像元的相位差值积分来实现相位解缠。积分时路径要绕开一些低质量、不一致的区域,这是路径跟踪算法的核心思想。这些方法都是一种局域算子,即误差被限制在局部区域内不会传播。第二类是以最小二乘算法为代表的基于最小范数思想的相位解缠算法,它是通过在整体上使缠绕相位的梯度与真实相位的
自适应滤波算法理解与应用
自适应滤波算法理解与应用 什么是自适应滤波器自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。 对于一些应用来说,由于事先并不知道所需要进行操作的参数,例如一些噪声信号的特性,所以要求使用自适应的系数进行处理。在这种情况下,通常使用自适应滤波器,自适应滤波器使用反馈来调整滤波器系数以及频率响应。 总的来说,自适应的过程涉及到将代价函数用于确定如何更改滤波器系数从而减小下一次迭代过程成本的算法。价值函数是滤波器最佳性能的判断准则,比如减小输入信号中的噪声成分的能力。 随着数字信号处理器性能的增强,自适应滤波器的应用越来越常见,时至今日它们已经广泛地用于手机以及其它通信设备、数码录像机和数码照相机以及医疗监测设备中。 下面图示的框图是最小均方滤波器(LMS)和递归最小平方(en:Recursive least squares filter,RLS,即我们平时说的最小二乘法)这些特殊自适应滤波器实现的基础。框图的理论基础是可变滤波器能够得到所要信号的估计。 自适应滤波器有4种基本应用类型:1)系统辨识:这时参考信号就是未知系统的输出,当误差最小时,此时自适应滤波器就与未知系统具有相近的特性,自适应滤波器用来提供一个在某种意义上能够最好拟合未知装置的线性模型 2)逆模型:在这类应用中,自适应滤波器的作用是提供一个逆模型,该模型可在某种意义上最好拟合未知噪声装置。理想地,在线性系统的情况下,该逆模型具有等于未知装置转移函数倒数的转移函数,使得二者的组合构成一个理想的传输媒介。该系统输入的延迟构成自适应滤波器的期望响应。在某些应用中,该系统输入不加延迟地用做期望响应。3)预测:在这类应用中,自适应滤波器的作用是对随机信号的当前值提供某种意义上的一个最好预测。于是,信号的当前值用作自适应滤波器的期望响应。信号的过去值加到滤
自适应滤波器的设计(终极版)
目录 摘要…………………..………………………………………………………..….............I 第1章绪论....................................................................................................................错误!未定义书签。 1.1引言……………………………………………...…..…………...……………...错误!未定义书签。 1.2课题研究意义和目的 (1) 1.3国内外研究发展状况 (2) 1.4本文研究思路与主要工作 (4) 第2章自适应滤波器理论基础 (5) 2.1自适应滤波器简介 (5) 2.2自适应滤波器的原理 (5) 2.3自适应滤波算法 (7) 2.4TMS320VC5402的简介 (8) 第3章总体方案设计 (10) 3.1无限冲激响应(IIR)滤波器 (10) 3.2有限冲激响应(FIR)滤波器 (11) 3.3电路设计 (11) 4基于软件设计及仿真 (17) 4.3 DSP的理论基础 (17) 4.4自适应滤波算法的DSP实现 (18) 5总结 (21) 参考文献 (22) 致谢 (23) 附录自适应滤波源代码 (24)
第1章绪论 1.1引言 随着微电子技术和计算机技术的迅速发展,具备了实现自适应滤波器技术的各种软硬件条件,有关自适应滤波器的新算法、新理论和新的实施方法不断涌现,对自适应滤波的稳定性、收敛速度和跟踪特性的研究也不断深入,这一切使该技术越来越成熟,并且在系统辨识、通信均衡、回波抵消、谱线增强、噪声抑制、系统模拟语音信号处理、生物医学电子等方面都获得了广泛应用口。自适应滤波器实现的复杂性通常用它所需的乘法次数和阶数来衡量,而DSP强大的数据吞吐量和数据处理能力使得自适应滤波器的实现更容易。目前绝大多数的自适应滤波器应用是基于最新发展的DSP 来设计的. 滤波技术是信号处理中的一种基本方法和技术,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波。自适应滤波的原理就是利用前一时刻己获得的滤波参数等结果,自动地调节现时刻的滤波参数,从而达到最优化滤波。自适应滤波具有很强的自学习、自跟踪能力,适用于平稳和非平稳随机信号的检测和估计。自适应滤波一般包括3个模块:滤波结构、性能判据和自适应算法。其中,自适应滤波算法一直是人们的研究热点,包括线性自适应算法和非线性自适应算法,非线性自适应算法具有更强的信号处理能力,但计算比较复杂,实际应用最多的仍然是线性自适应滤波算法。线性自适应滤波算法的种类很多,有LMS自适应滤波算法、R路自适应滤波算法、变换域自适应滤波算法、仿射投影算法、共扼梯度算法等。 1.2课题研究意义和目的 自适应滤波理论与技术是现代信号处理技术的重要组成部分,对复杂信号的处理具有独特的功能,对自适应滤波算法的研究是当今自适应信号处理中最为活跃的研究课题之一。自适应滤波器与普通滤波器不同,它的冲激响应或滤波参数是随外部环境的变化而变化的,经过一段自动调节的收敛时间达到最佳滤波的要求。自适应滤波器本身有一个重要的自适应算法,这个算法可以根据输入、输出及原参量信号按照一定准则修改滤波参量,以使它本身能有效的跟踪外部环境的变化。因此,自适应数字系
相位恢复算法在量子关联衍射成像中的应用研究
第27卷 第11期 2007年11月 光 学 学 报 ACT A OPT ICA SINICA V ol.27,No.11N ov ember ,2007 文章编号:0253 2239(2007)11 2075 7 相位恢复算法在量子关联衍射成像中的应用研究 * 刘永峰 张明辉 沈 夏 魏 青 韩申生 (中国科学院上海光学精密机械研究所,上海201800) 摘要: 随着研究工作的逐步深入,目前已经利用经典热光源实现了关联衍射成像,使得该技术有望在X 射线以及中子衍射成像等方面得到广泛应用。在实验利用非相干光得到物体无透镜傅里叶变换频谱的基础上,采用误差消除与输入输出恢复算法,并结合过采样理论,实现了实验所用物体透射率函数的恢复。分别得到了纯振幅物体的振幅分布函数与纯相位物体的相位分布函数。此外,还讨论了实验所得傅里叶变换频谱的噪声等因素对图像恢复结果的影响。 关键词: 量子光学;量子信息;量子关联衍射成像;相位恢复中图分类号:O 431.2;O 436 文献标识码:A *国家自然科学基金(60477007)和上海光科技特别项目基金(034119815)资助课题。 作者简介:刘永峰(1980-),男,吉林人,硕士研究生,主要从事非局域量子关联成像方面的研究。E mail:yfliu349@sio https://www.360docs.net/doc/a12433559.html, 导师简介:魏 青(1969-),男,陕西人,副研究员,主要从事生物光子学方面的研究。E mail:qing w @https://www.360docs.net/doc/a12433559.html, 收稿日期:2007 03 09;收到修改稿日期:2007 05 17 Application of Phase Retrieval Algorithm to Quantum Corre lated Diffraction Imaging Liu Yo ngfeng Zhang Minghui Shen Xia Wei Qing Han Shensheng (Sha ngha i Instit ute of Opt ics a nd Fin e Mecha nics ,the Chinese Academy of Scien ces ,S han gha i 201800)Abstract: With our research going deeply,quantum correlated diffraction imaging can be accomplished by use of c lassical thermal source now,which indicates its wide application in X ray and neutron diffrac tion imaging.The object transmission functions are suc cessfully retrieved from the lensless Fourier transform frequency spectrums,which are obta ined in experiment using incoherent https://www.360docs.net/doc/a12433559.html,ing the error reduction algorithm and the input output a lgorithm integrated with over sam pling theory,the amplitude distribution function of amplitude only object and the phase distribution function of pure phase object are retrieved successfully.The influence of the noise of Fourier transform frequency spectrum in the experiment on the retrieval result is a lso discussed. Key wo rds: quantum optic s;quantum information;qua ntum c orrelated diffraction imaging;phase retrieval 1 引 言 在某些情况下,相位信息与振幅信息同样重要。对于相位信息,在频率较低的波段可以直接探测得到,但是在光波段或者波长更短的波段,因为频率高达1014 H z 以上,目前探测器的响应速度无法实现直接探测,只能借助光场的干涉或衍射强度分布来间接地恢复光场的相位分布。近年来,在光场干涉与衍射研究领域,量子成像作为一个新的物理现象,引起了学者们的关注并开展了理论和实验方面的工作,起初主要是基于非经典纠缠光束开展相关研究 的[1~3]。随着研究的不断深入,科学家们又基于统计光学理论,提出并验证了利用经典热光场同样可以实现非局域关联成像[4~8] ,引导该方面研究走入一个新领域,也就是基于经典热光场的强度关联成像,使量子成像技术向实用化方向迈出重要一步 [9~13] 。目前实验上已经用非相干光源实现了物 体的无透镜傅里叶变换[14,15] ,得到的是光场的衍射强度信息,相位信息可以用相位恢复方法来间接得到,本文结合已有的相位恢复算法来研究量子关联衍射成像中的相位恢复问题。