平面四参数转换
平面四参数转换
引言:
我们求出四参数到底有什么意义呢?
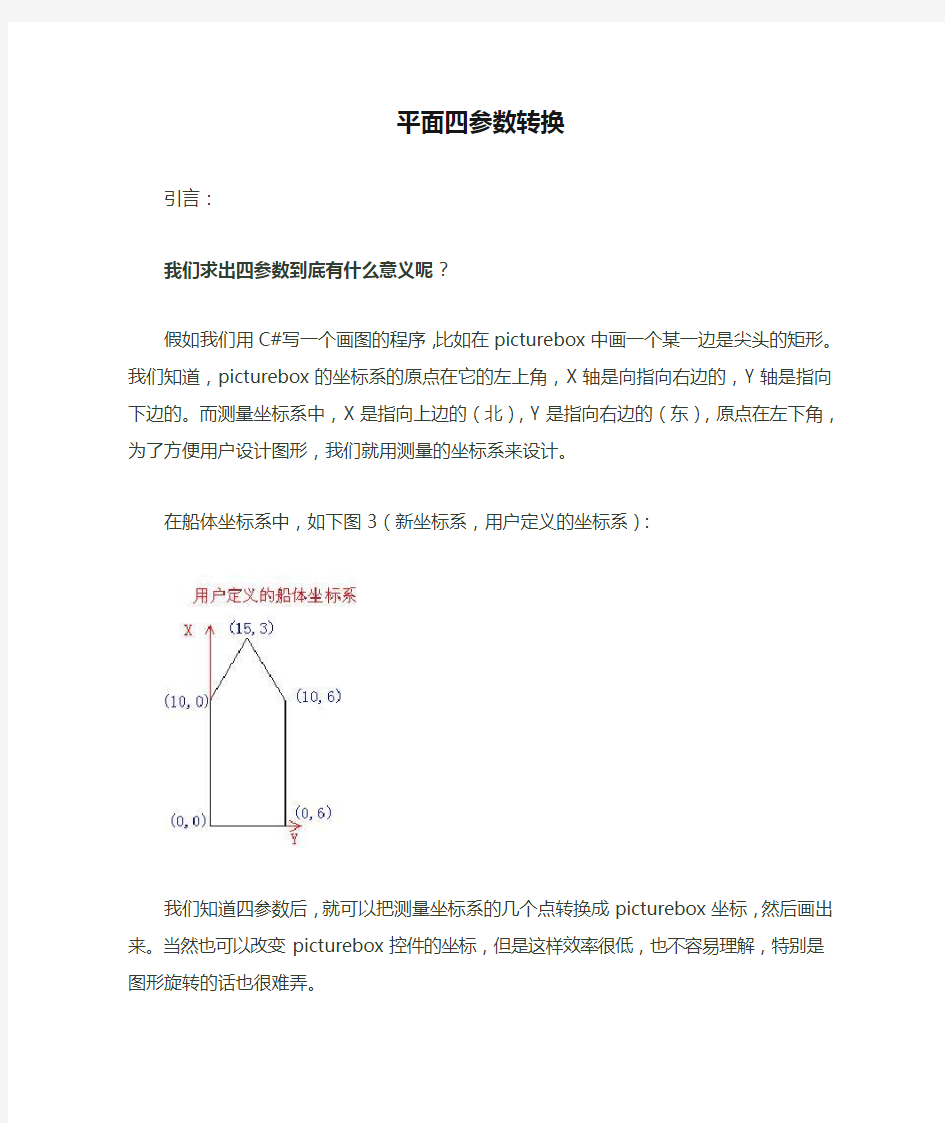
假如我们用C#写一个画图的程序,比如在picturebox中画一个某一边是尖头的矩形。我们知道,picturebox的坐标系的原点在它的左上角,X轴是向指向右边的,Y轴是指向下边的。而测量坐标系中,X是指向上边的(北),Y是指向右边的(东),原点在左下角,为了方便用户设计图形,我们就用测量的坐标系来设计。
在船体坐标系中,如下图3(新坐标系,用户定义的坐标系):
我们知道四参数后,就可以把测量坐标系的几个点转换成picturebox坐标,然后画出来。当然也可以改变picturebox控件的坐标,但是这样效率很低,也不容易理解,特别是图形旋转的话也很难弄。
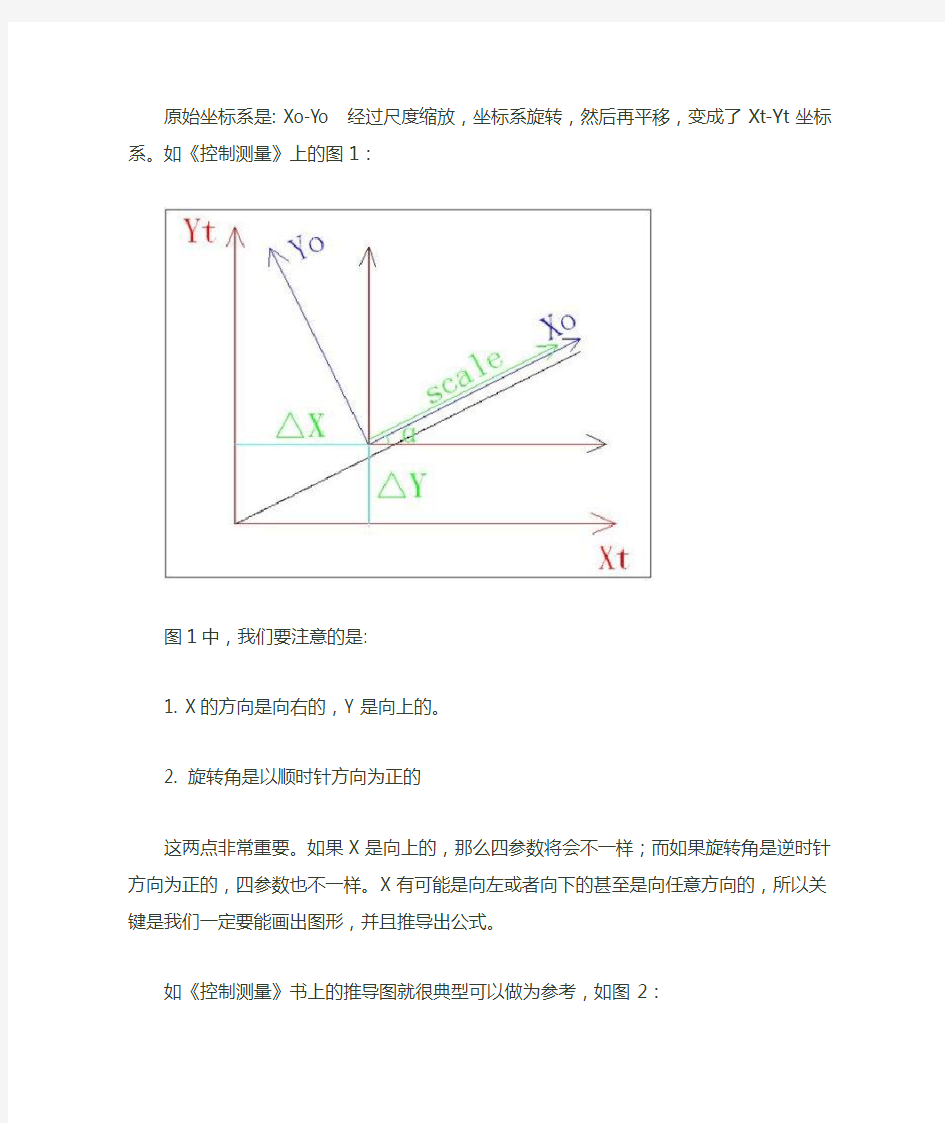
原始坐标系是: Xo-Yo 经过尺度缩放,坐标系旋转,然后再平移,变成了Xt-Yt 坐标系。如《控制测量》上的图1:
图1中,我们要注意的是:
1. X的方向是向右的,Y是向上的。
2. 旋转角是以顺时针方向为正的
这两点非常重要。如果X是向上的,那么四参数将会不一样;而如果旋转角是逆时针方向为正的,四参数也不一样。X有可能是向左或者向下的甚至是向任意方向的,所以关键是我们一定要能画出图形,并且推导出公式。
如《控制测量》书上的推导图就很典型可以做为参考,如图2:
这个图的优点就在于,它的源坐标系旋转后就成为水平和垂直的轴线,非常便于平移理解。
需要注意的是,图2中,源坐标系X向任意方向,Y轴的正方向和X轴的正方向逆时针旋转90度的方向一致,定义旋转角顺时针方向为正时。其实应该有4种情况,图上是下面提到的情况C。
假如源坐标系的X是向上的(其实X轴向哪个方向都没有关系,只要Y轴的正方向和X轴的正方向顺时针旋转90度的方向一致),Y是向右的,定义的旋转角逆时针旋转是正的,平面转换四参数的计算公式如下(公式1):
其中为新坐标,为两个平移参数,(1+m)为尺度,为旋转角,为原坐标。这就是下面提到的情况A。公式1也可以用在情况C。
令 ,
则四参数公式可以写成:
(公式2)
为了求解四参数,把所有已知的和未知的矩阵写在一起,构造出:
的形式,然后再利用求解。
公式2经过展开,变成下面的形式:
写成矩阵的形式(公式3):
这样我们就构造成了的形式,其中,,为原坐标系下某点的坐标,分别为原坐标系到新坐标系的平移量,,,其中(1+m)是尺度, 为旋转角。
公式三就这样变成了一个单纯的矩阵运算,2个点的话恰好能求出四参数,无法计算残差,如果大于等于3个点,就可以计算出残差,这实际上用了最小二乘法。
现在,我们来根据图1的实际情况假设几个比较接近情况的四参数:
假如原坐标系上有5个点,P1(0, 15) P2(0, 5) P3(3, 0) P4(6, 5) P5(6, 15) 其中P1(0, 15)表示在原坐标系下,点P1的X坐标为0, Y坐标为15。
现在,把原坐标系(整个坐标系:包括原点,X轴,Y轴)的X,Y轴都缩短为原来的1/2,然后把整个坐标系逆时针旋转30度,再把两条坐标轴或者说整个坐标系向X轴的负方向移动(旋转以后的X轴的正方向的反方向)4米(如果是负数,那么应该向旋转后的X轴的正方向移动个单位);同理,向Y轴的负方向移动3米(如果是负数就向正方向),经过这3个步骤,原坐标系变成了新的坐标系,原来的5个点,它们在新坐标系下的坐标分别是:
P1(-11.0, 28.981) P2(-1.0, 11.660) P3(9.196, 6.0) P4(9.392, 17.660)
P5(-0.608, 34.981)
注意:P1 P2 P3 P4 P5 并不同原坐标系一起旋转!
我们来看使用四参数的计算过程:
double c = fourP.Scale * Math.Cos(fourP.Rotate);
double d = fourP.Scale * Math.Sin(fourP.Rotate);
公式4:
aPtfNew.X = fourP.Xdelta + (c * aPtfOld.X - d * aPtfOld.Y); aPtfNew.Y = fourP.Ydelta + (d * aPtfOld.X + c * aPtfOld.Y);
只有同意了这个公式才能讨论下面的问题。
那么,我们求出四参数到底有什么意义呢?
假如我们用C#写一个画图的程序,比如在picturebox中画一个某一边是尖头的矩形。我们知道,picturebox的坐标系的原点在它的左上角,X轴是向指向右边的,Y轴是指向下边的。而测量坐标系中,X是指向上边的(北),Y是指向右边的(东),原点在左下角,为了方便用户设计图形,我们就用测量的坐标系来设计。
在船体坐标系中,如下图3(新坐标系,用户定义的坐标系):
如果我们把图3中的船体坐标系去掉,沿着船的矩形边缘建立一个类似于C#中的Picturebox的坐标系,那么在picturebox中各点坐标如下,如图4(源坐标系,它恰好是下面提到的4种情况的情况A):
这个过程到底是什么转换的呢?或许有些人一眼就看出了是picturebox坐标系先逆时针转90度,然后再下方移动15个单位就变成了船体的坐标系。但是大多数人反应毕竟没有那么快,还是有点晕的。所以现在我们看看可否通过四参数的求解,而不用画图或者凭借空间想象力来探讨坐标系的变换:
我们利用其中的两个点的两套坐标系,求出坐标系的变换参数:
P1(0, 15) P2(0, 5) 两个点在源的坐标系中的坐标(picturebox坐标系) P1(0, 0) P2(10, 0) 两个点在新的坐标系中的坐标(船体坐标系/用户坐标系)
求得的四参数是:(源坐标系的X向右,Y向下,逆时针旋转Rotate为正)
X平移 = 15.0
Y平移 = 0.0
旋转(度) = 90 (逆时针)
尺度 = 1.0
我们用刚才对四参数的解释来理解(按次序):1.不缩放 2.逆时针旋转90度 3.向此刻的坐标系(仅是尺度变化和旋转以后的形成的坐标系)的X方向的反方向移动15个单位。
这里有一个误区,是很容易让人混淆的地方。因为源坐标系和以前定义的不一样了,X,Y的方向分别是向右和向下的,逆时针旋转为正的。
我通过作图,得出的结论是存在4种情况:
情况A.
不管X是向哪个方向的(向上,向下,向左,向右或者任意方向),只要Y轴的正方向和X轴的正方向顺时针旋转90度的方向一致,而且定义旋转角逆时针方向为正,那么用的公式也是公式1。测量上用得最多的情况是X向上,Y向右;也是实例中的picturebox的坐标系的情况。
情况B.
X向任意方向,Y轴的正方向和X轴的正方向顺时针旋转90度的方向一致,定义旋转角顺时针方向为正(数学坐标系用得比较多),那么公式是:
显然,情况C的四参数计算和求解完全和情况A不同,需要重新推导,如果直接用公式3来求四参数和公司4来计算点在新坐标系下的xy,计算出来的结果和理解的肯定不一样。
情况C.
X向任意方向,Y轴的正方向和X轴的正方向逆时针旋转90度的方向一致,定义旋转角顺时针方向为正时,得出的也是公式1。如前面的图2显示,公式同情况A是:
情况A和情况C都可以用公式3来求四参数,用公式4来计算点在新坐标系下的XY坐标。
情况D.
如果,X向任意方向,Y轴的正方向和X轴的正方向逆时针旋转90度的方向一致,定义旋转角逆时针方向为正,那么公式同情况B是:
显然,情况D的四参数计算和求解完全和情况A不同,需要重新推导,否则计算出来的结果和理解的肯定是错的。
回到刚才讨论的应用的例子(船体坐标系和picturebox的转换)这和视觉上看起来是一样的,比较容易理解。这就恰恰是四参数的用武之地。
而在C#的picturebox中,我们是如何利用四参数来为我们服务的呢?
我们的想法是:重新定义picturebox的坐标系,让它变成船体坐标系,然后直接在picturebox上面画出5个船体坐标点的连线:P1(0, 0) P2(10, 0) P3(15, 3) P4(10, 6) P5(0, 6)
这其实有3个步骤(这要求我们把源坐标系和新坐标系颠倒过来看,就是说把picturebox坐标系当做源坐标系,这样四参数就反过来了。而当源坐标系的X 向右,Y向下,逆时针旋转时,四参数的计算公式和源坐标X向):
1. 先在picShip的paint事件中利用ScaleTransform把比例尺调整成我们需要的坐标范围,它本来是用象素做单位的,写入
e.Graphics.ScaleTransform(picShip.Width / 6, picShip.Height / 15)
把它的水平轴范围调整成[0,6],垂直的范围调整成[0, 15]
2. e.Graphics.RotateTransform(-90.0F); // 此句运行之后picShip的X坐标
向上了,Y向右了。可视区域的范围是x[-6, 0] y[0, 15]
3. e.Graphics.TranslateTransform(-15, 0); // 把旋转之后的坐标系再向下移动15个单位
这些我花了将近一两个星期的时间,始终不能理解,现在回头过来探讨1年前弄不清楚半知半解的东西——有点或然开朗的感觉。
这些都不太好理解,挺恶心,但是为了以后不再恐惧,我们不如多花点时间把它彻底弄清楚,增强我们的信心和实力。试验分析如下:
假如picturebox的长为400象素,高为300象素。
1. ScaleTransform(10, 10)的作用是,把picturebox的水平轴X轴拉长10倍,垂直轴也拉长10倍。那么picturebox现在能显示的范围就变成了:水平[0, 40] 垂直[0, 30]。而如果e.Graphics.ScaleTransform(0.1F, 0.1F)之后,picturebox可显示的范围放大了10倍将变成:水平[0, 4000] 垂直[0,3000] // ScaleTransform的作用是对坐标轴X轴和Y轴进行缩放
// pic能表达的范围缩小了10倍
e.Graphics.ScaleTransform(10, 10);
e.Graphics.DrawLine(Pens.Blue, new PointF(0, 0), new PointF(39, 29));
2.
// 作用把当前的坐标系改变,新坐标系的原点在源坐标系的[100, 10]位置
// 也就是说现在picturebox的左上角的坐标是[-100, -10]
// pic现在能表达的范围是: 水平[-100, 300] 垂直[-10, 290]
// 所以画出的两个点故意缩进了一下,这样就能看到整条线的面貌。
e.Graphics.TranslateTransform(100, 10);
e.Graphics.DrawLine(Pens.Blue, new PointF(-95, -5), new PointF(295, 285));
3.
// RotateTransform的作用是对坐标系进行顺时针的旋转
// 这个比较复杂,而且不好理解
// 假如是顺时针旋转30度后形成新的坐标系,
// 那么当前pic的右上角的点在新坐标系下的坐标是(346.4, -200)
// pic的左下角点在新坐标系中的坐标是[150, 259.8]
// pic的右下角点在新坐标系中的坐标是[496.4, 59.8]
e.Graphics.RotateTransform(30.0F);
// 连接到pic的右上角的点
e.Graphics.DrawLine(Pens.Blue, new PointF(5, 5), new PointF(340, -190)); // 连接到pic的左下角的点
e.Graphics.DrawLine(Pens.Blue, new PointF(5, 5), new PointF(155, 250)); // 连接到pic的右下角的点
e.Graphics.DrawLine(Pens.Blue, new PointF(5, 5), new PointF(485, 51));
最后,我们要注意的是:使用或者求解四参数之前,应该弄明白源坐标是如何定义的,X轴是向哪个方向,Y轴和X轴呈什么关系,旋转角是逆时针转为正还是正时针转为正,得自己推导一下公式。如果情况A和情况C,就可以用上面的公式3求解四参数,用公式4来计算xy,否则会出错的。所以会推导公式才是最重要的,千万不要乱用,乱猜,或者知之而不能言而乱言。
很多公式无法正常显示,代码也是,如果有需要的,请留下email,将发送word 文档和C#代码
曲线的参数方程(教案)
曲线的参数方程 教材 上海教育出版社高中二年级(理科)第十七章第一节 教学目标 1、理解曲线参数方程的概念,能选取适当的参数建立参数方程; 2、通过对圆和直线的参数方程的研究,了解某些参数的几何意义和物理意义; 3、初步了解如何应用参数方程来解决某些具体问题,在问题解决的过程中, 形成数学抽象思维能力,初步体验参数的基本思想。 教学重点 曲线参数方程的概念。 教学难点 曲线参数方程的探求。 教学过程 (一)曲线的参数方程概念的引入 引例: 2002年5月1日,中国第一座身高108米的摩天轮,在上海锦江乐园正式对外运营。并以此高度跻身世界三大摩天轮之列,居亚洲第一。 已知该摩天轮半径为51.5米,逆时针匀速旋转一周需时20分钟。如图所示,某游客现在点(其中点和转轴的连线与水平面平行)。问:经过秒,该游客的位置在何处? 引导学生建立平面直角坐标系,把实际问题抽象到数学问题,并加以解决 (1、通过生活中的实例,引发学生研究的兴趣;2、通过引例明确学习参数方程的现实意义;3、通过对问题的解决,使学生体会到仅仅运用一种方程来研究往往难以获得满意的结果,从而了解学习曲线的参数方程的必要性;4、通过具体的问题,让学生找到解决问题的途径,为研究圆的参数方程作准备。) (二)曲线的参数方程 1、圆的参数方程的推导 (1)一般的,设⊙的圆心为原点,半径为,0OP 所在直线 为轴,如图,以0OP 为始边绕着点按逆时针方向绕原点以匀角 速度作圆周运动,则质点的坐标与时刻的关系该如何建立呢? (其中与为常数,为变数) 结合图形,由任意角三角函数的定义可知: ),0[sin cos +∞∈???==t t r y t r x ωω 为参数 ① (2)点的角速度为,运动所用的时间为,则角位移t ωθ=,那么方程组①可以改写为何种形式? 结合匀速圆周运动的物理意义可得:),0[sin cos +∞∈???==θθ θr y r x 为参数 ② (在引例的基础上,把原先具体的数据一般化,为圆的参数方程概念的形成作准备,同时也培养了学生数学抽象思维能力)
中海达RTK两个控制点如何计算四参数
中海达R T K两个控制点如何计算四参数 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】
中海达RTK两个控制点如何计算四参数摘要 中海达RTK两个控制点计算四参数(转换参数)流程: 1.把两个控制点输入控制点库; 2.平滑采集两个控制点坐标; 3.计算参数。 注意:使用两个点计算四参数前,请确保坐标系统里“平面转换和高程拟合”为无! 否则会造成参数叠加,怎么算都是错误的! --------------------------------------------------------- 中海达RTK两个点求转换参数参数流程: 1、把两个控制点(GPS01\GPS05)输入控制点库 2、采集两个控制点坐标(GPS01\GPS05) 3、计算参数 1、把控制点输入到控制点库 进坐标数据,选择控制点,添加,把GPS01\GPS05依次添加进去。 2、采集控制点坐标 进碎步测量用平滑采集依次采集GPS01和GPS05点,输入点名 GPS01、GPS05,杆高保存。 ①碎步测量 ②点显示隐藏图标采集控制点GPS01,把移动站放在控制点GPS01上,气泡水平居中。 点平滑采集图标开始采集,平滑采集10次,输入点名(GPS01)、杆高()。平滑采集,每秒采集一次,采集10次求平均,精度较高!
③重复以上操作,采集控制点GPS05,把移动站放在控制点GPS05上,气泡水平居中,点平滑采集图标开始采集,平滑采集10次,输入点名(GPS05)、杆高() 3、计算参数 ①进计算参数 ②默认计算类型“四参数+高程拟合”,点添加依次添加GPS01和GPS05。 ④添加 GPS01,源点进点库从坐标点库选择GPS01,目标点——进点库从控制点库选择GPS01,保存。 ⑤同样添加 GPS05,保存 ⑥添加结果 ⑦计算 ⑧计算结果:四参数 平移北:— 平移东:— 旋转:— 尺度K:无限接近1,即 < K < 高程拟合 改正值A: 注意:尺度K<,尺度K>应该考虑操作错误或控制点有问题,必须检查错误重新计算! ⑨点击应用! 4、检核精度 参数计算完后,必须对所计算的参数进行精度检核,检核方法有两种:
极坐标和参数方程知识点总结大全
极坐标与参数方程 一、参数方程 1.参数方程的概念 一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x 、y 都是某个变数t 的 函数,即 ?? ?==) () (t f y t f x 并且对于t 每一个允许值,由方程组所确定的点M (x ,y )都在这条曲线上(即曲线上的点在方程上,方程的解都在曲线上),那么方程组就叫做这条曲线的参数方程,联系 x 、y 之间关系的变数叫做参变数,简称参数. 相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程. 2.参数方程和普通方程的互化 曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程. 练习 1.若直线的参数方程为12()23x t t y t =+?? =-?为参数,则直线的斜率为( ) A . 23 B .23- C .32 D .32 - 2.下列在曲线sin 2()cos sin x y θ θθθ =?? =+?为参数上的点是( ) A .1(,2 B .31(,)42 - C . D . 3.将参数方程2 2 2sin ()sin x y θ θθ ?=+??=??为参数化为普通方程为( ) A .2y x =- B .2y x =+ C .2(23)y x x =-≤≤ D .2(01)y x y =+≤≤ 注:普通方程化为参数方程,参数方程的形式不一定唯一(由上面练习(1、3可知))。应用参数方程解轨迹问题,关键在于适当地设参数,如果选用的参数不同,那么所求得的曲线的参数方程的形式也不同。
3.圆的参数方程 如图所示,设圆的半径为,点从初始位置出发,按逆时针方向在 圆上作匀速圆周运动,设,则。 这就是圆心在原点,半径为的圆的参数方程,其中的几何意义是 转过的角度(称为旋转角)。 圆心为,半径为的圆的普通方程是, 它的参数方程为:。 4.椭圆的参数方程 以坐标原点为中心,焦点在轴上的椭圆的标准方程为 其参数方程为,其中参数称为离心角;焦点在轴上的椭圆的标准方程是其参数方程为 其中参数仍为离心角,通常规定参数的范围为∈[0,2)。 注:椭圆的参数方程中,参数的几何意义为椭圆上任一点的离心角,要把它和这一点的旋转角区分开来,除了在四个顶点处,离心角和旋转角数值可相等外(即在到的范围内),在其他任何一点,两个角的数值都不相等。但 当时,相应地也有,在其他象限内类似。 5.双曲线的参数方程
坐标转换COORD4.2使用手册
坐标转换问题的详细了解对于测量很重要,那么请和我一起来讨论这个问题。 首先,我们要弄清楚几种坐标表示方法。大致有三种坐标表示方法:经纬度和高程,空间直角坐标,平面坐标和高程。 我们通常说的WGS-84坐标是经纬度和高程这一种,北京54坐标是平面坐标和高程着一种。 现在,再搞清楚转换的严密性问题,在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换这时不严密的。举个例子,在WGS-84坐标和北京54坐标之间是不存在一套转换参数可以全国通用的,在每个地方会不一样,因为它们是两个不同的椭球基准。 那么,两个椭球间的坐标转换应该是怎样的呢?一般而言比较严密的是用七参数法,即X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K。要求得七参数就需要在一个地区需要3个以上的已知点,如果区域范围不大,最远点间的距离不大于30Km(经验值),这可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化K视为0,所以三参数只是七参数的一种特例。在本软件中提供了计算三参数、七参数的功能。 在一个椭球的不同坐标系中转换需要用到四参数转换,举个例子,在深圳既有北京54坐标又有深圳坐标,在这两种坐标之间转换就用到四参数,计算四参数需要两个已知点。本软件提供计算四参数的功能。 现在举个例子说明:在珠江有一个测区,需要完成WGS-84坐标到珠江坐标系(54椭球)的坐标转换,整个转换过程是 这样的:
本软件使用说明: 本软件采用文件化管理,用户可以将一种转换作为一个文件保存下来,下次使用时从文件菜单中选择打开这个文件来调用所有已有的转换参数。 实例一: 转换要求: 用户在一个佛山测区内使用RTK GPS接收机接受了一些点的WGS-84的坐标,现在希望将其转换为北京54和佛山坐标系下的坐标。用户有佛山测区的一些控制点,这些控制点有WGS-84坐标,也有北京-54坐标也有佛山坐标。 分析: WGS-84坐标和北京54坐标是不同两个椭球的坐标转换,所以要求得三参数或七参数,而北京54和佛山坐标都是同一个椭球,所以他们之间的转换是地方坐标转换,需要求得地方转化四参数,因为要求得到的北京54是平面坐标所以需要设置投影参数。: 步骤: 1.1.新建坐标转换文件,便于下次使用转换是不用重新输入,直接打开即可。 2.2.设置投影参数。 3.3.用一个已知点(WGS84坐标和北京54坐标),计算不同椭球转换的三参数(或七参数)。
地铁线路平面曲线设计相关参数的确定(精)
地铁线路平面曲线设计相关参数的确定 摘要针对地铁不同于一般铁路的特点和现有技术资料不完全适用的情况,对地铁线路平面曲线设计中如何合理确定相关参数问题作了较详细论述。 关键词地铁线路曲线设计参数确定 地铁线路平面曲线设计涉及行车速度、圆曲线半径、缓和曲线长度、外轨超高、线间距加宽等多个参数, 各参数相互关联制约。1993 年发布的现行《地下铁道设计规范》( GB50157 92) (以下简称《设规》) 中有关规定尚不尽完善,而地铁又有其不同于一般铁路的自身特点,既有的铁路设计手册等技术资料也不完全适用, 因此,设计中常需自行计算合理确定这些参数,以期取得地铁线路较好的技术条件和节省部分工程投资。 1 曲线半径选择 曲线半径应根据行车速度、沿线地形、地物等条件因地制宜由大到小合理选定。地铁线路不同于野外一般铁路,它往往受城市道路和建筑物控制,曲线半径选择自由度小,常须设置较小半径曲线。地铁《设规》规定:“最小曲线半径一般情况300 m ,困难情况250 m。” 在实际设计中,对250 m 半径曲线,因其钢轨磨耗陡然加剧,除非因特殊条件控制不得已时方可采用,一般应控制在最小300 m。例如,天津地铁1 号线南段,因受津萍大厦桩基(地下线) 和城市干道交叉口及地铁设站位置(高架线) 控制,经多次研究比选,设计了3 处300 m 半径曲线,最终经市建委审批确定。 2 曲线超高与限速计算 列车通过较小半径曲线地段,为保证行车安全和乘客舒适要求,列车必须限速运行。列车通过曲线的最大允许速度(通常简称曲线限速),根据曲线外轨超高和旅客舒适度计算确定。 列车在曲线上运行时产生惯性离心力使乘客有不适感。因此,通常以设置外轨超高产生向心力,以达到平衡离心力的目的。 从理论上分析,车体重力P 产生的离心力为: J= Pv 2/gR (1) 由于设置外轨超高使车体向曲线内侧倾斜产生的车体重力P 和轨道对车辆的反力Q 的合力形成向心力(图1) 为Fn= P h/s (2) 当Fn =J 时,可得h = Sv 2/gR = 11. 8 V2/R (3) 式中g 重力加速度,9. 8 m/ s2 ;
坐标转换器使用说明
大地坐标(BLH) 平面直角坐标(XYZ) 四参数:X 平移、Y 平移、旋转角和比例 七参数:X平移,Y平移,Z 平移,X 轴旋转,Y 轴旋转,Z 轴旋转,缩放比例(尺度比) GPS控制网是由相对定位所求的的基线向量而构成的空间基线基线向量网,在GPS控制网的平差中,是以基线向量及协方差为基本观测量。 图3-1表示为HDS2003数据处理软件进行网平差的基本步骤,从图中可以看到,网平差实际上可以分为三个过程: l、前期的准备工作,这部分是用户进行的。即在网平差之前,需要进行坐标系的设置、并输入已知点的经纬度、平面坐标、高程等。 2、网平差的实际进行,这部分是软件自动完成的; 3、对处理结果的质量分析与控制,这部分也是需要用户分析处理的过程。 图3-1 平差过程 坐标系选择 针对不同的平差,要相应选择不同的坐标系,是否输入相应信息。在笔者接触过的项目中,平差时先通过三维无约束平差后,再进行二维约束平差。由于先进行的时三维无约束平差,是在WGS84坐标系统下进行的。 首先更改项目的坐标系统。在菜单“项目”->“坐标系统”或在工具栏“坐标系统”,则弹出“坐标
系统”对话框,选择WGS-84坐标。 图3-2 坐标系统 这里注意的是,在“投影”下见图,中央子午线是114°。很多情况下这里需要进行修改。 图3-3 WGS84投影 软件中自带的“中国-WGS 84”是允许修改的,我们换种方法:就是新建一个坐标文件,其他参数都和“中国-WGS84”一致,仅仅将中央子午线修改下。 在上图中,点击“新建”,得到“COORD GM”对话框,在“文件”->“新建”,如图
图3-4 新建坐标系统 然后在“设置”->“地图投影”,直接修改中央子午线,这里以81°为例,点击确定后,返回“COORD GM”对话框。 图3-5 投影设置 将输入源坐标和输入目标坐标的椭球,均改为WGS84。在“文件”->“保存”,输入名称和国家(中国),退出操作。
1、求下列各平面的坐标式参数方程和一般方程(精)
1、求下列各平面的坐标式参数方程和一般方程 (1)通过点)1,1,3(1M 和)0,1,1(2-M 且平行于矢量}2,0,1{-的平面; (3)已知四点A (5,1,3),B (1,6,2),C (5,0,4),D (4,0,6),求通过直线AB 且平行直线CD 的平面,并求通过直线AB 且与△ABC 所在平面垂直的平面 2、求下列平面的一般方程 (1)过点M (3,2,-4)且在X 轴和Y 轴上截距分另为-2和-3的平面 (2)已知两点M 1(3,-1,2),M 2(4,-2,-1),通过M 1且垂直于M 1M 2的平面 (3)过点M 1(3,-5,1)和M 2(4,1,2)且垂直于平面x-8y+3z-1=0的平面 3、将下列平面的一般方程化为法式方程 (1)x-2y+5z-3=0 (2) x+2=0 4、求自坐标原点向平面2x+3y+6z-35=0所引垂线的长和批向平面的单位法矢量的方向余弦 5、已知三角形顶点为A(0,-7,0),B(2,-1,1),C(2,2,2),求平面于△ABC 所在的平面且与它相距为 2个单位的平面方程 6、求在X 轴上且到平面12x-16y+15z+1=0和2x+2y-z-1=0距离相等的点 7、已知四面体的四个顶点为S(0,6,4),A(3,5,3),B(-2,11,-5),C(1,-1,4),计算从顶点S 向底面ABC 所引的高 8、求中心在C3,-5,-2)且与平面2x-y-3z+11=0相切的球面方程。 9、求与9x-y+2z-14=0和9x-y+2z+6=0平面距离相等的点的轨迹 10、判别点M(2,-1,1)和N(1,2,-3)在由下列相交平面所构成的同一个二面角内,还是分别在 相邻二面角内,或是在对顶的二面角内? (1)0323:1=-+-z y x π与042:2=+--z y x π (2)0152:1=-+-z y x π与01623:2=-+-z y x π 11、分别在下列条件下确定l,m,n 的值使lx+y-3z+1=0与7x-2y-z=0表示二平行平面 12、求下列两平行平面19x-4y+8z+21=0和19x-4y+8z+42=0间的距离 13、求两平面2x-3y+6z-12=0和x+2y+2z-7=0所成的角 14、求过Z 轴且与平面0752=--+z y x 成 60角的平面 15、 求下列各直线的方程 (1)通过点),,(0000z y x M 且平行于两相交平面0:1=+++i i i i D z C y B x A π)2,1(=i 的 直线 (2)通过点M (1,0,-2)且与两直线 11111-+==-z y x 和0 1111+=--=z y x 垂直的直线 16、求下列各平面的方程: (1) (1) 通过点P (2,0,1),且又通过直线 3 2121-=-=+z y x 的平面 (2) (2) 通过直线113312-+=-+=-z y x 且与直线???=--+=-+-052032z y x z y x 平行的平面 (3) (3) 通过直线 2 23221-=-+=-z y x 且与平面3x+2y-z-5=0垂直的平面 (4) (4) 通过直线???=-+-=+-+014209385z y x z y x 向三坐标面引的三个射影平面 17、化下列直线的一般方程为射影式方程与标准方程,并求出直线的方向余弦 (1)???=---=+-+0 323012z y x z y x
GPS四参数设置
GPS四参数设置 。 南方RTK使用中参数的求取及分类 一、控制点坐标库的应用 GPS 接收机输出的数据是WGS-84经纬度坐标,需要转化到施工测量坐标,这就需要软件进行坐标转换参数的计算和设置,控制点坐标库就是完成这一工作的主要工具。 控制点坐标库是计算四参数和高程拟合参数的工具,可以方便直观的编辑、查看、调用参与计算四参数和高程拟合参数的校正控制点。在进行四参数的计算时,至少需要两个控制点的两套坐标系坐标参与计算才能最低限度的满足控制要求。高程拟合时,使用三个点的高程进行计算时,控制点坐标库进行加权平均的高程拟合;使用4到6个点的高程时,控制点坐标库进行平面高程拟合;使用7个以上的点的高程时,控制点坐标库进行曲面拟合。控制点的选用和平面、高程拟合都有着密切而直接的关系,这些内容涉及到大量的布设经典测量控制网的知识,在这里没有办法多做介绍,建议用户查阅相关测量资料。 利用控制点坐标库的做法大致是这样的:假设我们利用A、B 这两个已知点来求取参数,那么首先要有A、B 两点的GPS 原始记录坐标和测量施工坐标。 A、B 两点的GPS原始记录坐标的获取有两种方式:一种是布设静态控制网,采用静态控制网布设时后处理软件的GPS 原始记录坐标;另一种是GPS 移动站在没有任何校正参数起作用的Fixed(固定解)状态下记录的GPS 原始坐标。其次在操作时,先在控制点坐标库中输入A 点的已知坐标,之后软件会提示输入A 点的原始坐标,然后再输入B 点的已知坐标和B 点的原始坐标,录入完毕并保存后(保存文件为*.cot文件)控制点坐标库会自动计算出四参数和高程拟合参数。 1.1、校正参数
地铁线路平面曲线设计相关参数的确定
收稿日期:20030317 作者简介:欧阳全裕(1938)),男,高级工程师,1963年毕业于长沙铁道学院铁道建筑专业。 地铁线路平面曲线设计相关参数的确定 欧阳全裕 (铁道第三勘察设计院 天津 300051) 摘 要 针对地铁不同于一般铁路的特点和现有技术资料不完全适用的情况,对地铁线路平面曲线设计中如何合理确定相关参数问题作了较详细论述。 关键词 地铁 线路 曲线 设计 参数 确定 地铁线路平面曲线设计涉及行车速度、圆曲线半径、缓和曲线长度、外轨超高、线间距加宽等多个参数,各参数相互关联制约。1993年发布的现行5地下铁道设计规范6(GB5015792)(以下简称5设规6)中有关规定尚不尽完善,而地铁又有其不同于一般铁路的自身特点,既有的铁路设计手册等技术资料也不完全适用,因此,设计中常需自行计算合理确定这些参数,以期取得地铁线路较好的技术条件和节省部分工程投资。1 曲线半径选择 曲线半径应根据行车速度、沿线地形、地物等条件因地制宜由大到小合理选定。地铁线路不同于野外一般铁路,它往往受城市道路和建筑物控制,曲线半径选择自由度小,常须设置较小半径曲线。地铁5设规6规定:/最小曲线半径一般情况300m,困难情况250m 。0在实际设计中,对250m 半径曲线,因其钢轨磨耗陡然加剧,除非因特殊条件控制不得已时方可采用,一般应控制在最小300m 。例如,天津地铁1号线南段,因受津萍大厦桩基(地下线)和城市干道交叉口及地铁设站位置(高架线)控制,经多次研究比选,设计了3处300m 半径曲线,最终经市建委审批确定。2 曲线超高与限速计算 列车通过较小半径曲线地段,为保证行车安全和乘客舒适要求,列车必须限速运行。列车通过曲线的最大允许速度(通常简称曲线限速),根据曲线外轨超高和旅客舒适度计算确定。 列车在曲线上运行时产生惯性离心力使乘客有不适感。因此,通常以设置外轨超高产生向心力,以达到平衡离心力的目的。 从理论上分析,车体重力P 产生的离心力为: J =Pv 2/gR (1) 由于设置外轨超高使车体向曲线内侧倾斜产生的车体重力P 和轨道对车辆的反力Q 的合力形成向心力(图1)为 F n =P h/s (2)当F n =J 时,可得 h =Sv 2 /gR =11.8V 2 /R (3) 式中 g )))重力加速度,9.8m/s 2; r )))曲线半径,m ; s )))内外轨头中心距离,取1500mm ;v 、V ))) 行车速度,v 单位为m/s ,V 单位为 km/h ; h )))所需外轨超高度,mm 。 图1 超高与向心力关系图 由式(3)可见,当曲线半径一定时,速度越高,要求设置的超高就越大。为保证行车安全,又必须限制超高的最大值h max ,因此,当速度要求的超高超过h max 时,即产生了欠超高h q 和未被平衡的离心力而影响乘客舒适度,因而对欠超高值也必须有所限制。我国客货混运铁路规定,一般情况下,曲线最大超高150mm ,允许欠超高75mm ,曲线限速为4.32R 。地铁5设规6规定了曲线最大超高值120mm ,而对欠超高值未作条文规定,但从乘客舒适要求角度,根据国内外试验资料,规定/允许有不超过0.4m/s 2 的未被平衡横向加速度0,据此可推算出地铁线路允许的最大欠超高值。 对某一实设曲线而言,超高h 是定值。当列车以v max 通过时,将产生最大的欠超高h qma x 为 #线路/路基#
平面设计参数 印刷参数大全
常用标准尺寸 ?办公用纸标准尺寸单位:mm A1026×37B1031×44 ●A组纸张尺寸的长宽比都是,然后舍去到最接近的毫米值。 A0定义成面积为1平方米,长宽比为的纸张。接下来的A1、A2、A3……等纸张尺寸,都是定义成将编号少一号的纸张沿著长边对折,然后舍去到最接近的毫米值。 最常用到的纸张尺寸是A4,后来为了能在打印出全副A3大小的图像,又定义了A3+和SRA3大小,就是人们通常说的“出血”纸,A3+的大小是457mmx305mm,SRA3的大小是450mmx320mm。 ●B组纸张尺寸是编号相同与编号少一号的A组纸张的几何平均。举例来说,B1是A1和A0 的几何平均。 ●C组纸张尺寸是编号相同的A、B组纸张的几何平均。举例来说,C2是B2和A2的几何平均。 ●C组纸张尺寸主要使用于信封。一张A4大小的纸张可以刚好放进一个C4大小的信封。 如果你把A4纸张对折变成A5纸张,那它就可以刚好放进C5大小的信封,同理类推。 ?常见证件照对应尺寸 1英寸25mm×35mm 2英寸35mm×49mm 3英寸35mm×52mm 港澳通行证33mm×48mm 赴美签证50mm×50mm 日本签证45mm×45mm 大二寸35mm×45mm 护照33mm×48mm 毕业生照33mm×48mm 身份证22mm×32mm 驾照21mm×26mm 车照60mm×91mm ?印刷标准尺寸 1、海报尺寸+招贴画尺寸 A3海报尺寸:成品尺寸420*285mm四开海报尺寸:成品尺寸420*580mm 对开海报尺寸:成品尺寸860*580mm 2、手提袋常规尺寸 大2开手提袋尺寸:330mm(宽)*450mm(高)*90mm(侧面) 正2开手提袋尺寸:280mm(宽)*420mm(高)*80mm(侧面) 大3开手提袋尺寸:250mm(宽)*350mm(高)*80mm(侧面) 正3开手提袋尺寸:240mm(宽)*290mm(高)*80mm(侧面) 3、宣传册尺寸 宣传册最通用尺寸:16K,210mmx285mm
RTK坐标转换中四参数法与七参数法精度比较
2006年第5期(第24卷262期)东北水利水电67[文章编号]1002--0624(2006)05一0067一02 RTK坐标转换中四参数法与七参数法精度比较 茹树青t,吉长东z,王宏宇, (1.阜新市水利勘测设计研究院,辽宁阜新123000;2.辽宁工程技术大学,辽宁阜新123000; 3.阜新蒙古族自治县河道站,辽宁阜新123100;) [摘要]文章探讨了P.TK坐标转换中的参数法和七参数法的原理,并对观测的平面坐标进行了精度 的分析和比较。 [关键词]四参数;七参数;IkTK;坐标转换 [中图分类号]P204 随着GPSrZTK技术的出现,其以精度高、速度快和不存在误差累积等优点在各行各业中被广泛应用。坐标转换是R.TK技术里不可缺少的重要部分。不同的空间直角坐标系之间的转换一般采用布尔萨(Bursa)七参数模型,本文在研究布尔萨模型的基础上导出四参数模型。GPS接收机一般是利用三个以上的重合点的两套坐标值通过七参数(或三参数)和四参数来实现坐标转换。在常用的GPS接收机中Ashtechz—x采用的是四参数模型。而Trimble5700采用的则是七参数模型。 本文利用Ashtechz—x和Trimble5700双频GPS接收机(均是4台套(1+3),水平方向标称精度均是10mm+lppm),采用实时载波相位差分技术(R.TK)完成了某工程GPS测量工作。用两种型号的GPSIkTK.对135个图根点分别独立观测2次,并用GTS一6全站仪(标称精度为2”,3mm+2ppm),采用全站仪导线的方法,按I级导线要求,对上述点中的50个点进行检测(抽检比例为37%),总结出在该地区,只有2个已知点的情况下,四参数法要优于七参数法。 1七参数模型 设x压和xa分别为地面网点和GPS网点的 [文献标识码]B 参心和地心坐标向量。由布尔萨(Bursa)模型可知: X压=AX+(1+南)R(8:)尺(s,)R(8;)x伍(1)式中x口=(x赝,Y口,磊),Xa.=(Xa,Y盘,玩),△x=(AX,AY,△z)为平移参数矩阵;k为尺度变化参数:旋转参数矩阵为 FCOSs.sine,0] R(乞)。J-sine,co嗡0I, 【-001j ~P000。5i1吩], R(岛)2lI, [sine,0COSSyj r100] R(&)=10COS,fix—sirle,l Lo—sine,co沾,j 通常将AX,AY,△z,k,8:,岛,吼称为坐标系问的转换参数。为了简化计算,当k,£,占,,8,为微小量时,忽略其间的互乘项,且COS8—1,sirls—s。则上述模型变为: 【收稿日期】2005—12—12 【作者简介】茹树青(1965一),男,辽宁阜新市人。工程师,从事工程测量工作。 卦、,七+‘l,k+XyZ△△△
四参数及七参数的简介及测量中的应用
关于四参数和七参数的认识 一、参数的概念: 1、不同的二维平面直角坐标系之间转换时,通常使用四个参数。 (1)两个坐标平移量(△X,△Y),即两个平面坐标系的坐标原点之间的坐标差值; (2)平面坐标轴的旋转角度A,通过旋转一个角度,可以使两个坐标系的X和Y轴重合在一起。 (3)尺度因子K,即两个坐标系内的同一段直线的长度比值,实现尺度的比例转换。通常K值几乎等于1. 通常至少需要两个公共已知点,在两个不同平面直角坐标系中的四对XY坐标值,才能推算出这四个未知参数,计算出了这四个参数,就可以通过四参数方程组,将一个平面直角坐标系下一个点的XY坐标值转换为另一个平面直角坐标系下的XY坐标值。 2、两个不同的三维空间直角坐标系之间转换时,,在该模型中有七个未知参数。 (1)三个坐标平移量(△X,△Y,△Z),即两个空间坐标系的坐标原点之间坐标差值; (2)三个坐标轴的旋转角度(△α,△β,△γ)),通过按顺序旋转三个坐标轴指定角度,可以使两个空间直角坐标系的XYZ轴重合在一起。
(3)尺度因子K,即两个空间坐标系内的同一段直线的长度比值,实现尺度的比例转换。通常K值几乎等于1. 通常至少需要三个公共已知点,在两个不同空间直角坐标系中的六对XYZ坐标值,才能推算出这七个未知参数,计算出了这七个参数,就可以通过七参数方程组,将一个空间直角坐标系下一个点的XYZ坐标值转换为另一个空间直角坐标系下的XYZ坐标值。 二、参数的实际使用。 1.四参数是指相同点在不同平面坐标系中坐标的转换的参数。在测绘工程中,高斯投影平面直角坐标系就是平面直角坐标系,而在一个平面直角坐标系下由于工程建设的需要而建立的建筑坐标系,这就涉及到从测量坐标系到建筑坐标系的转化。在数字化测图中,坐标转化也有许多的应用,比如; 一、测站改正(一个测站上架设一起算观测的坐标数据因为测站点及后视点设置问题,比如测站点设置错误,或者后视点错误导致整个测站数据的错误)可用四参数转换,将坐标数据转换成正确的数据 二、自由设站法中的运用。当使用全站仪进行数字化测图时,由于通视条件的限制,可采用只自由设站法:根据所测地形任一点架设仪器,后视坐标由所测距离假设方位角计算得出。在此测站上测两个或以上的以往测量的点的坐标,作为坐标转换点。根据这些公共点的坐标即可计算自由测站数据与正确数据之间的转换四参数。 2.目前我们外业测量采用RTK仪器比较居多,而RTK获取的
参数方程题型大全
参数方程 1.直线、圆、椭圆的参数方程 (1)过点M (x 0,y 0),倾斜角为α的直线l 的参数方程为????? x =x 0+t cos α, y =y 0+t sin α(t 为参数). (2)圆心在点M 0(x 0,y 0),半径为r 的圆的参数方程为????? x =x 0+r cos θ, y =y 0+r sin θ(θ为参数). (3)椭圆x 2a 2+y 2 b 2=1(a >b >0)的参数方程为? ???? x =a cos φ,y =b sin φ (φ为参数). (4)双曲线x 2a 2-y 2 b 2=1(a >0,b >0)的参数方程为????? x =a 1cos θ,y =b tan θ (θ为参数). (5)抛物线px y 22 =的参数方程可表示为)(. 2, 22为参数t pt y pt x ?? ?==. 基础练习 1.在平面直角坐标系中,若曲线C 的参数方程为?? ? x =2+22t , y =1+2 2 t (t 为参数),则其普通方程为 ____________. 2.椭圆C 的参数方程为? ???? x =5cos φ, y =3sin φ(φ为参数),过左焦点F 1的直线l 与C 相交于A ,B 两点, 则|AB |min =________.
3.曲线C 的参数方程为? ??? ? x =sin θ,y =cos 2θ+1(θ为参数),则曲线C 的普通方程为____________. 4.在平面直角坐标系xOy 中,已知直线l 的参数方程为??? x =1+12 t , y =3 2t (t 为参数),椭圆C 的方程 为x 2+ y 2 4 =1,设直线l 与椭圆C 相交于A ,B 两点,则线段AB 的长为_______________ 考点一 参数方程与普通方程的互化 (基础送分型考点——自主练透) [考什么·怎么考] (1)??? x =1 t , y =1 t t 2 -1 (t 为参数);(2)????? x =2+sin 2θ, y =-1+cos 2θ(θ为参数).(3)?? ??? x =1 cos θ ,y =tan θ 2.求直线????? x =2+t ,y =-1-t (t 为参数)与曲线? ???? x =3cos α, y =3sin α(α为参数)的交点个数. 考点二 参数方程的应用 (重点保分型考点——师生共研) 角度一:t 的几何意义
分享RTK测量中平面转换参数问题的一些探讨
RTK 测量中平面转换参数问题的一些探讨 程 锋 (诸暨市勘测设计研究院, 诸暨 311800) 摘 要:本文探讨了RTK 测量中平面转换参数的求解方法和产生原因,简单分析了诸暨市RTK 测量系统平面转换参数的变化规律。 关键词:RTK ;转换参数;平面加高程转换模型 1 引言测绘信息网https://www.360docs.net/doc/a214411701.html, RTK (Real Time Kinematic )测量系统地面部分通常包括基准站和流动站。基准站接收GPS 卫星发射的数据,并将接收到的数据发送给流动站;流动站接收GPS 卫星和基准站发射的数据,将两者进行差分处理,求解出基准站和流动站在WGS-84参考椭球体下的相对位置关系,然后通过WGS-84坐标系和地方坐标系之间的转换参数,将WGS-84坐标系下的成果转换到地方坐标系中。因而,获得WGS-84坐标系和地方坐标系之间的转换参数是RTK 测量中的必要条件之一。WGS-84坐标系与地方坐标系(1980国家坐标系、1954北京坐标系或各地独立的地方坐标系)之间的转换可分为三维转换和平面加高程转换两种模式。 三维转换模式是在空间直角坐标系下进行的,大多采用bursa-wolf 模型,可分为七参数以及简化的三参数方法,七参数转换模型比较严密,适合于大区域,简化的三参数方法适合于小区域。平面加高程转换模式是将平面转换和高程转换分别进行,这种方式易于实现,也适合于小区域。平面加高程转换模式中平面转换参数通常包括平移参数(0x ?,0y ?)、尺度参数m 和旋转参数ω。由于WGS-84坐标系数据可以用空间直角坐标、大地坐标、平面直角坐标等形式表示,对于不同表示形式的起算数据,尺度参数和旋转参数代表的含义会有所不同。下面结合实际工作中的经验,仅就平面加高程转换模式中平面转换参数问题作一些粗浅的探讨。测绘信息网https://www.360docs.net/doc/a214411701.html, 2平面加高程转换模式基本流程 平面加高程转换模式中平面转换参数的求解流程一般表述如下: (1)WGS-84系下的空间直角坐标(XYZ )84转换为大地坐标(BLH)84 ; (2)WGS-84的大地坐标(BLH)84采用高斯投影转换为平面直角坐标(xyH)84; (3)WGS-84的平面直角坐标(xyH)84采用平面坐标转换公式一转换为地方坐标系下的(xyH)L 。 G G L y x y x m y x y x ??? ?????????'-'+??????'+?? ?? ????=??????11 00ωω (1式)
极坐标与参数方程知识点总结大全
1.平面直角坐标系中的坐标伸缩变换 设点P(x,y)是平面直角坐标系中的任意一点,在变换的作用下,点P(x,y)对应到点,称为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 2.极坐标系的概念 (1)极坐标系 如图所示,在平面内取一个定点,叫做极点,自极点引一条射线,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系. 注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面 直角坐标系都是平面坐标系. (2)极坐标 设M是平面内一点,极点与点M的距离|OM|叫做点M的极径,记为;以极轴为始边,射线为终边的角叫做点M的极角,记为.有序数对叫做点M的极坐标,记作. 一般地,不作特殊说明时,我们认为可取任意实数. 特别地,当点在极点时,它的极坐标为(0, )(∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示. 如果规定,那么除极点外,平面内的点可用唯一的极坐标表示;同时,极坐标表示的点也是唯一确定的. 3.极坐标和直角坐标的互化 (1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示: (2)互化公式:设是坐标平面内任意一点,它的直角坐标是,极坐标是(),于是极坐标与直角坐标的互化公式如表: 点直角坐标极坐标 互化公 在一般情况下,由确定角时,可根据点所在的象限最小正角. 4.常见曲线的极坐标方程
注:由于平面上点的极坐标的表示形式不唯一,即都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程点可以表示为等多种形式,其中,只有的极坐标满足方程. 二、参数方程 1.参数方程的概念 一般地,在平面直角坐标系中,如果曲线上任意一点的坐标都是某个变数的那么,由方程组①所确定的点都在这条曲线上,并且对于的每一个允许值,函数①. 方程①就叫做这条曲线的参数方程,联系变数的变数叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程. 2.参数方程和普通方程的互化 (1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程. (2)如果知道变数中的一个与参数的关系,例如,把它代入普通方程,求出另一个变数与参数的关系,那么就是曲线的参数方程,在参数方程与普通方程的互化中,必须使的取值范围保持一致. 注:普通方程化为参数方程,参数方程的形式不一定唯一。应用参数方程解轨迹问题,关键在于适当地设参数,如果选用的参数不同,那么所求得的曲线的参数方程的形式也不同。 3.圆的参数 如图所示,设圆的半径为,点从初始位置出发,按逆时针方向在圆上作匀速圆周
crood坐标转换说明书
Coord坐标转换软件说明书 此软件的下载地址(内含完整说明书): https://www.360docs.net/doc/a214411701.html,/down/2008/1025/down_326.html 坐标转换问题的详细了解对于测量很重要,那么请和我一起来讨论这个问题。 首先,我们要弄清楚几种坐标表示方法。大致有三种坐标表示方法:经纬度和高程,空间直角坐标,平面坐标和高程。 我们通常说的WGS-84坐标是经纬度和高程这一种,北京54坐标是平面坐标和高程着一种。 现在,再搞清楚转换的严密性问题,在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换是不严密的。举个例子,在WGS-84坐标和北京54坐标之间是不存在一套转换参数可以全国通用的,在每个地方会不一样,因为它们是两个不同的椭球基准。 那么,两个椭球间的坐标转换应该是怎样的呢?一般而言比较严密的是用七参数法(包括布尔莎模型,一步法模型,海尔曼特等),即X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K。要求得七参数就需要在一个地区需要3个以上的已知点,如果区域范围不大,最远点间的距离不大于30Km(经验值),这可以用三参数(莫洛登斯基模型),即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化K视为0,所以三参数只是七参数的一种特例。在本软件中提供了计算三参数、七参数的功能。 在一个椭球的不同坐标系中转换可能会用到平面转换,现阶段一般分为四参数和平面网格拟合两种方法,以四参数法在国内用的较多,举个例子,在深圳既有北京54坐标又有深圳坐标,在这两种坐标之间转换就用到四参数,计算四参数需要两个已知点。更精确的可以提供网格拟合数据,本软件提供计算和应用四参数的功能,也提供了网格拟合的功能。 另外,还有高程拟合的问题,大地水准面模型在国内用户中很少会用到,但在国际上已经是标准之一,本软件提供最常用的EGM96模型和Geoid99模型。 最后,本软件提供了ITRF框架转换方法,涉及到ITRF2000和以往用过的ITRF96,ITRF93之间的换算,对于方面的需求的用户是个尝试。 现在举个例子说明:在珠江有一个测区,需要完成WGS-84坐标到珠江坐标系(54椭球)的坐标转换,整个转换过程是 这样的: 本软件使用说明: 本软件采用坐标系统库管理,用户可以将一种转换在系统库里保存下来,下次使用时从文件菜单中选择打开库文件来调用所有已有的转换参数。 实例一: 转换要求: 用户在一个佛山测区内使用RTK GPS接收机接受了一些点的WGS-84的坐标,现在希望将其转换为北京54和佛山坐标系下的坐标。用户有佛山测区的一些控制点,这些控制点有WGS-84坐标,也有北京-54坐标也有佛山坐标。 分析: WGS-84坐标和北京54坐标是不同两个椭球的坐标转换,所以要求得三参数或七参数,而北京54和佛山坐标都是同一个椭球,所以他们之间的转换是地方坐标转换,需要求得地方转化
平面四参数转换
平面四参数转换 引言: 我们求出四参数到底有什么意义呢? 假如我们用C#写一个画图的程序,比如在picturebox中画一个某一边是尖头的矩形。我们知道,picturebox的坐标系的原点在它的左上角,X轴是向指向右边的,Y轴是指向下边的。而测量坐标系中,X是指向上边的(北),Y是指向右边的(东),原点在左下角,为了方便用户设计图形,我们就用测量的坐标系来设计。 在船体坐标系中,如下图3(新坐标系,用户定义的坐标系): 我们知道四参数后,就可以把测量坐标系的几个点转换成picturebox坐标,然后画出来。当然也可以改变picturebox控件的坐标,但是这样效率很低,也不容易理解,特别是图形旋转的话也很难弄。 原始坐标系是: Xo-Yo 经过尺度缩放,坐标系旋转,然后再平移,变成了Xt-Yt 坐标系。如《控制测量》上的图1:
图1中,我们要注意的是: 1. X的方向是向右的,Y是向上的。 2. 旋转角是以顺时针方向为正的 这两点非常重要。如果X是向上的,那么四参数将会不一样;而如果旋转角是逆时针方向为正的,四参数也不一样。X有可能是向左或者向下的甚至是向任意方向的,所以关键是我们一定要能画出图形,并且推导出公式。 如《控制测量》书上的推导图就很典型可以做为参考,如图2:
这个图的优点就在于,它的源坐标系旋转后就成为水平和垂直的轴线,非常便于平移理解。 需要注意的是,图2中,源坐标系X向任意方向,Y轴的正方向和X轴的正方向逆时针旋转90度的方向一致,定义旋转角顺时针方向为正时。其实应该有4种情况,图上是下面提到的情况C。 假如源坐标系的X是向上的(其实X轴向哪个方向都没有关系,只要Y轴的正方向和X轴的正方向顺时针旋转90度的方向一致),Y是向右的,定义的旋转角逆时针旋转是正的,平面转换四参数的计算公式如下(公式1): 其中为新坐标,为两个平移参数,(1+m)为尺度,为旋转角,为原坐标。这就是下面提到的情况A。公式1也可以用在情况C。 令 , 则四参数公式可以写成:
四参数坐标转换原理和程序设计
龙源期刊网 https://www.360docs.net/doc/a214411701.html, 四参数坐标转换原理和程序设计 作者:冯骥 来源:《科技资讯》2013年第16期 摘要:四参数在平面坐标转换中被广泛应用,如何正确和科学地使用四参数显得尤为重要。通过分析四参数的原理,提出用VB编程求解四参数的方法,并结合工程实例,分析和判断如何选取公共点,满足了测绘和施工的要求。 关键词:四参数坐标转换 RMS 中图分类号:P208 文献标识码:A 文章编号:1672-3791(2013)06(a)-0035-02 坐标转换是是从一种坐标系统变换到另一种坐标系统的过程,通过建立两个坐标系统之间一一对应关系来实现,它是各种比例尺地图测量和编绘中建立地图数学基础必不可少的步骤。坐标转换一般有两种意义,一是地图投影变换,即从一种地图投影转换到另一种地图投影,地图上各点坐标均发生变化;另一是量测系统坐标转换,即从大地坐标系到地图坐标系、数字化仪坐标系、绘图仪坐标系或显示器坐标系之间的坐标转换。在测绘和施工中,常常会遇到不同坐标系统间坐标转换的问题,目前国内常见的转换有以下3种:大地坐标和平面直角坐标的相互转换、不同椭球坐标系间的相互转换和平面坐标系间的相互转换。常用的方法有四参数法、三参数法和七参数法。本文主要介绍了利用自编的坐标转换软件对四参数转换原理和方法做详细的讲解。 1 四参数坐标转换的原理 在我国平面坐标系中以1954北京坐标系为主,除此之外各地又建有相应的地方独立坐标系统。在测绘和项目施工中,我们常常需将1954北京坐标和地方独立坐标进行互相转换。该类型的转换为同一个椭球系统的不同坐标系中的转换,对于这样的转换至少需要两个公共点求取转换参数,如图1所示,设xoy为1954北京坐标系,x′o′y′为地方独立坐标系,xo、yo为地方独立坐标系的原点O′在1954北京坐标系中的坐标,α为地方独立坐标系的纵轴o′x′在1954北京坐标系中的坐标方位角。设已知P点的地方独立坐标为(x′p、y′p),则可按下式将其换算为1954北京坐标(xp、yp),其转换公式为: Xp=△x+X′p×K×cosα-Y′p×K×sinα Yp=△y+X′p×K×sinα+Y′p×K×cosα 式中K为尺度因子,α为旋转角度,△x,△y为相对应的平移。求得△x,△y,a,K就能方便的计算出当地的坐标了,也可通过该公式对坐标转换进行反算,来把地方独立坐标换算为1954北京坐标系(图1)。