4.3控制系统的干扰与反馈
§4.3闭环控制中的干扰与反馈
一、教学目标:
知识与技能目标:
1、学生能理解干扰的概念,掌握克服干扰的基本方法;
2、掌握控制系统反馈的作用和基本工作过程;
3、了解功能模拟方法和黑箱方法的基本概念和运用方法。
过程与方法目标:
1、学生能分析简单控制系统中的干扰,归纳出克服干扰的基本方法;
2、运用所学知识,激发出学生对于克服控制中的干扰的创新思维;
3、能综合各种控制系统的有关知识,掌握控制系统的工作过程。
情感与价值观目标:
1、通过对干扰实验的体验和观察,获得对干扰的感性认识;
2、通过内化干扰的知识,形成正确的对系统中干扰的认识,并建立稳定的控制系统认态度。
二、教学重点:
1、掌握控制系统干扰因素的识别并设计简单克服方案。
2、了解控制系统的工作过程。
三、教学难点:
1、分析克服干扰的具体方法;
2、黑箱方法的具体案例
四、教学过程:
【引入】视频播放:利用“干扰器”对汽车实施盗窃
【学生思考】是什么原因导致汽车无法遥控锁门?
【教师总结】车主用遥控钥匙锁门的同时,不法分子利用“干扰器”发出干扰信号,使车门遥控上锁系统无法正常工作。这个例子告诉我们控制系统在工作过程中可能会由于受到干扰而出现工作异常甚至失灵。
【新课教学】
一、干扰因素
干扰因素是指在控制系统中,除输入量(给定值)以外,引起被控量变化的各种因素
注意点:输入量变化引起的被控量变化以及系统部件故障引起的变化均不属于干扰因素。
二、干扰对控制功能的影响
1、现实生活中的干扰的例子
A、外界光线对投影效果的干扰
(对周围的控制系统的分析,就近对课室投影的干扰分析,学生更有体验)
B、骑自行车时风和路况对骑车的干扰。
2、思考与分析
(1)在出现干扰的情况下,开环控制系统和闭环控制系统哪种受干扰的影响小?为什么?
闭环控制系统受影响较小,因为闭环控制系统能不断修正控制效果。
(2)举出一些由于干扰而使控制系统受到影响的例子。
雨天交通、坐飞机必须关闭手机、老式CRT电视机旁边有手机来电时图像会明显抖动、声响附近有手机来电时会发出被干扰的声音等等
【马上行动】
在电冰箱的温度控制系统中,下列情况是否属于影响其温度控制的干扰因素?
⑴开电冰箱门;
⑵电冰箱所在房间的温度从0℃变到32℃;
⑶把热菜或热饭放入电冰箱中;
⑷在电冰箱旁边打手机。
3.在一般控制系统中,干扰因素是需要克服的,但在某些特殊情况下也可以利用。
【自制教具】一个光控报警系统,光线弱了就报警,可以作为光控灯的控制器。
白天在教室里试验发现要全部捂住才能报警,仅仅挡住光敏管上部不报警。
【学生讨论】导致光敏报警器不灵敏的原因?寻找增加其灵敏度的方法?
【解决办法】采用水笔上的一段黑色套子套在光敏管上再进行试验,发现只要一挡住光敏管上部,系统马上报警,大大增加了灵敏度。
三、反馈
由于干扰因素的存在,控制系统的输出往往会达不到我们预先期望的目标,为了避免这种情况,我们采用增加检测装置检测输出信号是否已经达到预期目标的方法来克服这个问题。
控制系统中,将输出量通过适当的检测装置返回到输入端并与输入量进行比较的过程称之为反馈。
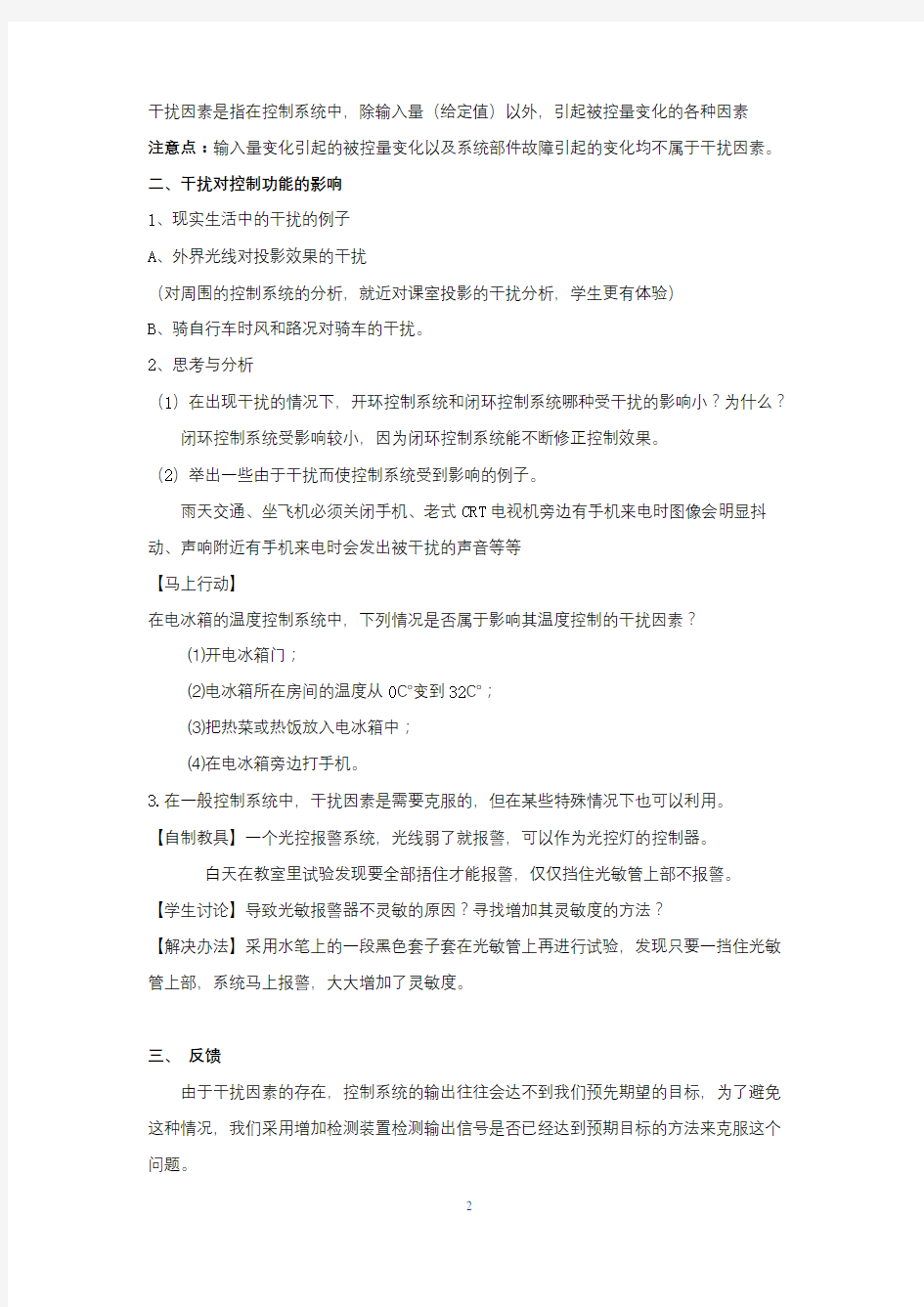
【案例分析】电冰箱的温度控制
阅读教材关于该控制系统的工作原理,回答下列问题: (1)该控制系统的反馈装置是机械装置还是电子装置?
(2)如果我要调低冰箱的温度,我应该控制旋钮1顺时针还是逆时针旋转? [马上行动]:
事例 输入 检测装置 输出 “穿针引线” 线的位置 眼睛 线与针孔对准 花房恒温控制系统 温控器设定温度
温度传感器
花房温度
主弹簧及连接
杆 (控制器)
活动触点 (执行器)
压缩机 电冰箱 (被控对象)
+
电冰箱工作温度
感温包、膜盒、传动膜片
(检测、反馈)
-
前馈反馈控制系统
前馈—反馈复合控制系统 摘要 流量是工业生产过程中重要的被控量之一,因而流量控制的研究具有很大的现实意义。锅炉的流量控制对石油、冶金、化工等行业来说必不可少。本论文的目的是锅炉进水流量定值控制,在设计中充分利用自动化仪表技术,计算机技术,自动控制技术,以实现对水箱液位的过程控制。首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。然后,根据被控对象模型和被控过程特性并加入PID调节器设计流量控制系统,采用动态仿真技术对控制系统的性能进行分析。同时,通过对实际控制的结果进行比较,验证了过程控制对提高系统性能的作用。随着计算机控制技术的迅速发展,组态技术开始得到重视与运用,它能够很好地解决传统工业控制软件存在的种种问题,使用户能根据控制对象和控制目的任意组态,完成最终的自动化控制工程。 关键词:流量定值;过程控制;PID调节器;前馈控制;系统仿真
目录 一.前馈控制 1.前馈控制的定义 2.换热器前馈控制 二.前馈控制的特点及局限性 1.前馈控制的特点 2.前馈控制的局限性 三.反馈控制 1.定义
2.反馈控制的特点 四.复合控制系统特性 1.前馈-反馈复合控制原理 2.复合控制系统特点 五.小结 六.参考文献 一、前馈控制 1.前馈控制的定义 前馈控制(英文名称为Feedforward Control),是按干扰进行调节的开环调节系统,在干扰发生后,被控变量未发生变化时,前馈控制器根据干扰幅值,变化趋势,对操纵变量进行调节,来补偿干扰对被控变量的影响,使被控变量保持不变的方法。
2.换热器前馈控制 在热工控制系统中,由于控对象通常存在一定的纯滞后和容积滞后,因而从干扰产生到被调量发生变化需要一定的时间。从偏差产生到调节器产生控制作用以及操纵量改变到被控量发生变化又要经过一定的时间,可见,这种反馈控制方案的本身决定了无法将干扰对被控量的影响克服在被控量偏离设定植之前,从而限制了这类控制系统控制质量的进一步提高。考虑到偏差产生的直接原因是干扰作用的结果,如果直接按扰动而不是按偏差进行控制,也就是说,当干扰一出现调节器就直接根据检测到的干扰大小和方法按一定规律去控制。由于干扰发生后被控量还未显示出变化之前,调节器就产生了控制作用,这在理论上就可以把偏差彻底消除。按照这种理论构成的控制系统称为前馈控制系统,显然,前馈控制对于干扰的克服要比反馈控制系统及时的多。 前馈控制系统的工作原理可结合下面图1所示的换热器前馈控制进一步说明,图中虚线部分表示反馈控制系统。 图1换热器物料出口温度前馈控制流程图 t一定。当被加换热器是用蒸汽的热量加热排管中的料液,工艺上要求料液出口温度 1 热水流量发生变化时,若蒸汽量不发生变化,而要使出口温度保持不变,就必须在被加热水量发生变化的同时改变蒸汽量。这就是一个前馈控制系统。 图中虚线所示是反馈控制的方法,这种方法没有前馈控制及时。图1前馈控制系统的原理框图于图2所示。
闭环控制系统的干扰和反馈说课稿
闭环控制系统的干扰和反馈说课稿 1.教材分析及教学设计介绍 本节是在学生对控制系统有一定认识的基础上具体的阐述闭环控制系统的干扰与反馈的辨证关系,是全书的重点章节,也是控制系统的具体应用章节章节。为以后学习的控制系统的设计等内容奠定了理论基础。 【教学目标】 知识目标:了解闭环控制系统的干扰与反馈的各方面因素 能力目标:能结合身边的案例找出干扰的因素,并作出分析。 情感目标:培养学生对一个控制系统的理解能力和分析能力,并能从物性到理性过渡,能对学习与人生产生干扰影响的因素进行分析。 【重点与难点】 重点:学会分析干扰在控制系统的影响,反馈在技术发明和革新中的作用。 难点:干扰系统的全面分析,反馈环节的使用。 【教法设计】 本课通过“案例分析法”,采用启发式、讲述式、分析等多种教学方式,以课程目标为依据,努力提高教学的生动性和逻辑性,激发学生的学习兴趣,提高学生的注意力,使学生能够自己建构出本课的知识点。 【学法设计】 本节课的教学对象是刚刚对控制系统有了初步的了解学生,对控制的干扰还蒙着一层神秘的面纱。好奇心较强,思维活跃,虽然他们的生活经验不是很丰富,但根据他们现有的认知水平和认知风格还是很容易接受本节课的内容。 本课教给学生的学法是“分析案例——合作探究——得出结论——思维扩展”。 【教学策略】 根据本课的教学目标,我采用教师讲授,媒体演示,任务驱动,学生自主思考、合作讨论等多种教学方法相结合的策略。 2.教案 【创设情境、导入新课】 做一个简单的调查:每天上学骑自行车的感受?乘车的感受等? 在送乘飞机出行时,为什么不能说祝你一路顺风,(活跃课堂气氛,激发学生的求知欲。)大部分同学应该是有风的影响,从而联系到本节课的内容:干扰因素,同时乘车也有干扰,而且不论是骑自行车还是乘车干扰因素不止一个,有主要的,有次要的。 这节课我们就研究研究闭环控制系统的干扰与反馈。 【新课教学】 1、干扰因素 本环节通过对二个典型的案例的分析,由学生归纳闭环控制系统的干扰与反馈。再联系实际生活,由学生列举生活中的例子,证明他们的观点。 案例一:逆风中骑自行车。 案例二:飞机飞行。 结论:在控制系统中,干扰因素一定有,可能有一个,也可能有若干个 案例三:战士在大风大雨中进行射击练习。 扩展讨论:生活中还有哪些例子说明“闭环控制系统的干扰是存在的,是不可避免的”? 马上行动:对电冰箱这个系统的分析,干扰因素,对干扰因素的控制, 扩展讨论:通过分析,增加对电冰箱的了解,进而了解生活。
2020版应用前馈-反馈复合控制机制创建企业安全文化
( 安全文化 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 2020版应用前馈-反馈复合控制机制创建企业安全文化 Safety culture is the product of human civilization, and corporate safety culture is to provide a guarantee for safe production in production, life and survival activities of enterprises.
2020版应用前馈-反馈复合控制机制创建 企业安全文化 1创建安全文化的意义 企业安全文化是全体员工共同遵守的行为准则,发挥着重要的作用它支配着人们的思维方式,规范着人们的行为习俗,约束着人们的情感抒发,左右着人们的审美趣味,规定着人们的价值取向,体现出强烈的终极关怀。 随着社会实践和生产实践的发展,人们发现尽管有了科学技术手段和管理手段,但对于搞好安全生产来说,还是不够的。科技手段达不到生产的本质安全,在安全管理上,要时时、事事、处处监督企业每一位职工遵章守纪,是一件困难的事情,甚至是不可能的事。安全文化却可以弥补安全管理手段的不足。 安全文化之所以能弥补安全管理的不足,是因为安全文化注重
人的观念、道德、伦理、态度、情感、品行等深层次的人文因素,通过教育、宣传、奖惩、创建群体氛围等手段,不断提高企业职工的安全修养,改进其安全意识和行为,从而使职工从不得不服从管理制度的被动执行状态,转变成主动自觉地按安全要求采取行动,即从“要我安全”转变成“我要安全”。 因此,创建安全文化有着极其重大的意义。 2前馈—反馈复合控制的原理 控制就是根据确定的目标,使事物向着这一目标不断趋近,反馈控制就是把系统输出的信息的某一部分,返回到输入端,对系统输入再输出的信息施加影响,使系统沿着减少目标差的方向实现控制,克服环境扰动带来的不稳定性,使系统达到动态平衡。 前馈控制系统,在受控部位的活动发生偏差之前就发出控制指令。是一种预测控制,通过对系统当前工作状态的了解,预测出下一阶段系统的运行状况。如果与参考值有偏差,那么就提前给出控制信号,使干扰获得补偿,稳定输出,消除误差。前馈的缺点是在使用时需要对系统有精确的了解,只有了解了系统模型才能有针对
前馈控制和反馈控制
前馈控制、反馈控制及前馈-反馈控制的对比 1、前馈控制属于开环控制,反馈控制属于负反馈的闭环控制 一般定值控制系统是按照测量值与给定值比较得到的偏差进行调节,属于闭环负反馈调节。其特点是在被控变量出现偏差后才进行调节;如果干扰已经发生而没有产生偏差,调节器不会进行工作。因此反馈控制方式的调节作用落后于干扰作用。 前馈调节是按照干扰作用来进行调节的。前馈控制将干扰测量出来并直接引入调节装置,对于干扰的克服比反馈控制及时。 现在以换热器控制方案举例,直观阐述前馈控制和反馈控制: 前馈控制方案 反馈控制方案 2、前馈控制系统中测量干扰量,反馈控制系统中测量被控变量 在单纯的前馈控制系统中,不测量被控变量,而单纯的反馈控制系统中不测量干扰量。 3、前馈控制需要专用调节器,反馈控制一般采用通用PID调节器 反馈调节符合PID调节规律,常用通用PID调节器、DCS等或PLC控制系统实现。 前馈调节使用的调节器是是根据被控对象的特点来确定调节规律的前馈调节器。 4、前馈控制只能克服所测量的干扰,反馈控制则可克服所有干扰 前馈控制系统中若干扰量不可测量,前馈就不可能加以克服。而反馈控制系统中,任何干扰,只要它影响到被控变量,都能在一定程度上加以
克服。 5、前馈控制理论上可以无差,反馈控制必定有差 反馈调节使系统达到动态稳定,让被调参数稳定在给定值附近动态变化,却不能使被调参数稳定在给定值上不动。 前馈调节在理论上可以实现无差调节。 6、前馈控制的局限性 A、在生产应用中各种环节的特性是随负荷变化的,对象动态特性形式多样性难以精确测量,容易造成过补偿或欠补偿。为了补偿前馈调节的不准确,通常将前馈和反馈控制系统结合起来组成前馈反馈控制系统。 B、工业对象存在多个扰动,若均设置前馈控制器,那设备投资高,工作量大。 C、很多前馈补偿结果在现有技术条件下没有检测手段。 D、前馈控制受到前馈控制模型精度限制。 E、前馈控制算法,往往做近似处理。
闭环控制系统的干扰与反馈教案
闭环控制系统的干扰与反馈 教材:(凤凰国标教材)普通高中课程标准实验教科书通用技术(必修2) 文档内容:闭环控制系统的干扰与反馈 章节:第四单元控制与设计第三节闭环控制系统的干扰与反馈 课时:第1课时 作者:叶朝晖(海南省海南中学) 一、教学目标 1. 知识与技能目标 (1)能结合案例找出影响简单控制系统运行的主要干扰因素,并作分析。 (2)熟悉闭环控系统中反馈环节的作用。 (3)能识读和画出简单的闭环控制系统的方框图,理解其中的控制器、执行器的作用。 2. 过程与方法目标 (1)通过课堂小试验亲身体验“反馈”的作用。 (2)通过典型闭环控制系统的分析,熟悉闭环控制系统的基本组成及工作过程。 (3)逐步形成理解和分析闭环控制系统的一般方法,学会使用逆推法分析问题。 3. 情感态度与价值观目标 (1)通过“神奇”的自动控制装置,感受科技的魅力,形成和保持探究控制系统的兴趣与热情。 (2)通过对闭环控制系统的探究,形成勇于探索敢于创造优良品质。 二、教学重点 本节学习重点偏重于对闭环控制系统反馈环节的作用的体会,及学会用系统框图来帮助分析和理解闭环控制系统。 三、教学难点 分析闭环控系统的基本组成及工作过程 四、教学方法 演示法、逆推分析法、游戏法 五、设计思想: 1. 教材分析 本节是“控制与设计”第三节的内容,其内容包括“干扰因素”、“反馈”、“功能模拟方法”和“黑箱方法”。闭环控制系统相对于开环控系统要复杂些,但闭环控制系统因其控制准,自动化程度高,有着“神奇”的控制效果,对学生来说也同样具有一定的吸引力,成为学生进一步学习的动力。本节学习重点偏重于对闭环控制系统反馈环节的作用的体会,及学会用系统框图来帮助分析和理解闭环控制系统。
前馈控制系统的基本原理
前馈控制系统的基 本原理
前馈控制系统 前馈控制系统的基本原理 前馈控制的基本概念是测取进入过程的干扰(包括外界干扰和设定值变化),并按其信号产生合适的控制作用去改变操纵变量,使受控变量维持在设定值上。图2.4-1物料出口温度θ需要维持恒定,选用反馈控制系统。若考虑干扰仅是物料流量Q ,则可组成图 2.4-2前馈控制方案。方案中选择加热蒸汽量s G 为操纵变 量。 图2.4-1 反馈控制 图2.4-2 前馈控制 前馈控制的方块图,如图 2.4- 3。 系统的传递函数可表示为: )()()()()(1S G S G S G S Q S Q PC ff PD += (2.4-1) 式中)(s G PD 、)(s G PC 分别表示对象干扰 道和控制通道的传递函数;)(s G ff 为前馈控 图2.4-3 前馈控制方块图
制器的传递函数。 系统对扰动Q实现全补偿的条件是: ) (≠ s Q时,要求0 ) (= s θ(2.4-2) 将(1-2)式代入(1-1)式,可得 ) (s G ff = ) ( ) ( S G S G PC PD -(2.4-3) 满足(1-3)式的前馈补偿装置使受控变量 θ不受扰动量Q变化的影响。图2-4-4表示 了这种全补偿过程。 在Q阶跃干扰下,调节作用 c θ和干扰作用dθ的响应曲线方向相反,幅值相同。因此它们的合成结果,可使θ达到图2.4-4 前馈控制全补偿示意图 理想的控制连续地维持在恒定的设定值上。显然,这种理想的控制性能,反馈控制系统是做不到的。这是因为反馈控制是按被控变量的偏差动作的。在干扰作用下,受控变量总要经历一个偏离设定值的过渡过程。前馈控制的另一突出优点是,本身不形成闭合反馈回路,不存在闭环稳定性问题,因而也就不存在控制精度与稳定性矛盾。 1.前馈控制与反馈控制的比较
高中通用技术《闭环控制系统的干扰与反馈》教案 新人教版
浙江省衢州市仲尼中学高中通用技术《闭环控制系统的干扰与反馈》教案 新人教版 一、教材分析 本课是《技术与设计2》的第四单元“控制与设计”的第三节“闭环控制系统的干扰与反馈”中的第三课时的内容,包括“功能模拟方法”和“黑箱方法”两部分内容。功能模拟方法是以功能行为的相似性为基础建立模型,用模型模拟原型的功能和行为的一种方法。教材首先以“加热炉温度的手工控制与自动控制”的比对案例来说明功能模拟方法。温度能自动控制的加热炉系统在上一课时是已经分析探讨过的案例。在这里重提就可以很好的与“手工控制加热炉”配对比较。但考虑到“加热炉”对学生来说还是比较陌生,所以在上课时不采用这个案例,而是改用“人工驾驶与自动驾驶汽车”的案例做比对。教材在后面又举了根据模型与人脑在功能行为上相似而实现对人脑的模拟的“国际象棋人机对弈”案例,从而使功能模拟方法更清晰的展现在我们面前。在“黑箱方法”部分教材使用“中医看病”“挑西瓜”等贴切生活的案例把黑箱方法分析得非常的清晰明了。教材引用这些生活化的案例就一子就把理论与人的距离拉近了,陌生感也没有了。利用黑箱方法事物进行分析,可使许多繁杂的问题简单化,它是认识事物的一种有效方法。 教材内容的顺序编排也是比较合理的。在前几课时分别介绍了“控制”“开环控制系统”“闭环控制系统”“干扰因素”“反馈”等内容,而这些都是学习探讨功能模拟方法与黑箱方法的前提基础。 二、学情分析 在此前,学生学过了开环与闭环控制系统,对开环与闭环控制系统的组成也都有了一定的认识,这些再加上学生的生活经历都是学习本节的前提基础。“人工驾驶汽车”“中医看病”“挑选西瓜、椰子、电视机”以及“机器人”都是学生熟悉的案例,正是以这些熟悉的案例做分析铺垫,才有可能降低理解难度。本课主要通过大量的生活案例让学生在分析案例的过程中逐步掌握功能模拟方法与黑箱方法的思想的,但对于功能模拟方法的理解还是有一定难度的,所以在实施教学时需要想办法去突破。 三、教学目标 通过“汽车全自动驾驶”与“人工驾驶”的类比分析理解功能模拟方法和“挑椰子”“判别计算机性能”等案例的分析,了解黑箱方法的应用。知道功能模拟方法与黑箱方法都是研究控制系统的常用方法,了解功能模拟方法与黑箱方法在控制系统中的应用懂得功能模拟方法与黑箱方法在控制领域的重要作用;将功能模拟方法特别是黑箱方法有意识的渗透到今后的问题分析当中。 四、教学重点 功能模拟方法与黑箱方法在控制系统的设计与分析中应用。 五、教学难点 1. 功能模拟方法的理解。 2. 功能模拟方法与黑箱方法在控制系统的设计与分析中应用。。 六、教学方法 教授、案例分析、任务驱动。 七、设计思想 1. 设计理念 功能模拟方法是仿生学中的一种常用研究方法,在控制领域应用广泛,它也为人工智能研究的提供了科学方法。在平时进行方案构思时采用的模仿法与本课探讨的功能模拟法很相近,模仿法的范畴更大一些,这一点在上课时是一定要学生清楚的。本节教学的主体任务是使学生理解并掌握两种分析、设计控制系统的思想方法,最终能对两种方法做简单的应用。为了让学生易于理解就必须尽可能的多使用案例,且是学生熟悉的案例,案例既有文字性也有图片式的。 2.教学策略设计 先以“人工驾驶汽车”的方向控制问题做导入,分析汽车的行驶方向是如何受到控制的,接着投影“全自动驾驶汽车”案例,比较前后两种行驶方向的控制,知道“全自动驾驶汽车”中控制器代替了人脑的转
前馈—反馈复合控制系统
目录 课程设计任务书 一、前馈—反馈复合控制系统 1.1、前馈—反馈复合控制系统的基本概念 (3) 1.2、概念的理解 (3) 1.3、前馈—反馈系统的组成.........................................3—4 1.4、前馈—反馈复合控制系统的特点.. (4) 1.5、前馈—反馈复合控制系统中前馈前馈控制器的设计 (4) 二、控制系统的硬件设计 2.1、S7—300系统组成 (4) 2.2、CPU315—2DP (4) 2.3、模式选择开关…………………………………..…….4—5 2.4、状态及故障显示 (5) 三、控制系统的软件设计 3.1、硬件组态 (5) 3.2、工程管理器的使用 (6) 3.3、新建工程....................................................6—9 3.4、组态监控画面. (9) 3.5、组态变量……………………………………………9—10 3.6、软件编程…………………………………………..10—15 3.7、实验结果分析……………………………………….15—17
四、控制系统的调试 五、实验总结 一、前馈—反馈复合控制系统 1.1、前馈—反馈复合控制系统的基本概念 前馈—反馈复合控制系统:系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈—反馈复合控制系统。 1.2、概念的理解: (1)复合控制系统是指系统中存在两种不同的控制方式,即前馈、反馈(2)前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器 (3)引入反馈控制,是为了是系统能够克服所有的干扰信号对被调量产生的影响,除了已知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是我们能够考虑到的,有的我们肯本就考虑不到或是无法测量,都通过反馈控制来克服。 (4)系统中需要测量的信号既有被调量又有扰动信号。 1.3、前馈—反馈系统的组成 前馈—反馈复合控制系统主要由一下几个环节构成 (1)扰动信号测量变送器:对扰动信号测量并转化统一的电信号 (2)被调量测量变送器:对被调量测量并转化统一的电信号 (3)前馈控制器:对干扰信号完全补偿
前馈反馈水箱控制系统设计
课程设计 名称:前馈反馈水箱控制系统系别: 专业: 姓名: 学号: 指导教师:
·成绩评定· 指导教师评语: 课程设计成绩评定 班级姓名学号 综合成绩: 指导教师签字年月日
目录 一设计方案的介绍 (4) 二、工艺流程 (5) 三、前馈反馈控制的理论 (5) 四、设仪器仪表的选型 (5) 1、控制装置的选择 (5) 2、监测仪表 (6) 3、控制阀的选型 (6) 五、测量与控制端连接表 (7) 六、参数的整定 (7) 1、静态放大系数K F的整定 (7) 2、控制器参数的选择 (8) 七、总结 (9) 八、参考文献 (10)
九、附录 一设计方案的介绍 设计采用前馈反馈控制来实现水箱的液位控制。其中前馈控制可以补偿干扰对被控变量的扰动,前馈控制之后产生的余差则可以通过反馈控制进行修正,达到要求的控制精度。被控变量为水箱的液位,控制变量为水的流量。 采用两个支路,其中第一个支路为主回路,包括一个水泵(采用变频器变频控制电机模拟流量扰动),涡轮流量计;第二个支路为控制补偿回路,包括一个水泵(输出流量恒定),电动控制阀。除此之外在反馈回路中还需要一个液位测量仪表和PID控制仪表一台。前馈控制在不考虑控制通道与对象通道延迟,而且支路一流量可以准确的测量,需要一个PID控制仪表。前馈控制信号和反馈控制信号通过一个加法器连接,实现对控制阀的控制。 前馈反馈系统结构框图 1
前馈反馈控制系统原理图 2 二工艺流程 水箱液位的控制主要是控制水箱中的液位在要求的精度范围内。 一号水泵作为动力源给水的输送提供动力,进入水箱。并用变频器控制一号水泵用来模拟流量上产生的扰动。 二号水泵为补偿回路提供动力,为水箱提供水补偿。当扰动产生后,通过前馈控制调节阀对扰动产生补偿。补偿后产生的余差再通过反馈控制控制调节阀进行调节。 三前馈反馈控制的原理 前馈控制又称扰动补偿,它与反馈调节原理完全不同,是按照引起被调参数变化的干扰大小进行调节的。在这种调节系统中要直接测量负载干扰量的变化,当干扰刚刚出现并能被测出时,调节器就能发出调节信号使调节量作相应的变化,使两者在被调量发生偏差之前抵消。因此,前馈调节对干扰的客服比反馈调节及时。但是前馈控制是开环控制,其控制效果需要通过反馈加以检验。前馈控制器在测出扰动之后,按过程的某种物质或能量平衡条件计算出校正值。如果前馈支路出现扰动,经过流量计测量之后,测量得到干扰的大小,然后在反馈支路通过调整调节阀开度,直接进行补偿。而不需要经过调节器。 四仪器仪表的选型 1、控制装置的选择 由于不是大型生产过程,对自动化水平要求不高,所以选择采用常规仪表控制。考虑到价格、实用性等因素,选择数字化、智能化的国产电动控制仪表。如果考虑控制仪
前馈控制系统设计
目录 一、前馈控制系统设计 1、前馈控制系统选择原则 1.1 扰动量可测不可控原则 (2) 1.2 控制系统精确辨识原则 (2) 1.3被控系统自衡原则 (3) 1.4 优先性原则 (3) 1.5 经济性原则 (4) 2、工程整定 2.1 整定的总体原则 2.1.1 稳定性 (4) 2.1.2快速性 (5) 2.1.3 反馈控制的静差 (5) 3、前馈-反馈复合系统工程整定 (5) 二、实例仿真 (6) 2.1前馈控制系统整定 (7) 2.2反馈控制系统前向通道稳定性分析 (7) 2.3、反馈控制系统整定 (8) 2.4、系统仿真 (9) 三、心得体会 (11) 四、参考文献 (12)
二、实例仿真 系统按结构分类,可分为:静态前馈控制、动态前馈控制、前馈-反馈复合控制系统、前馈-串级复合控制系统等。 其中,前馈-反馈复合控制系统的特点是利用前馈抑制对系统影响较大的干扰,利用反馈控制抑制其他干扰以及前馈所“遗留”部分干扰。前馈调节器和反馈调节器的整定方法如前所述。一般为了实现系统无静差,反馈调节器多选PI控制方式。 前馈反馈复合控制系统仿真主要包括:系统识别、控制系统整定和系统仿真等内容。其中控制系统整定包括前馈控制系统整定和反馈控制系统整定两部分。本例采用前馈、反馈分别整定的方法。 假设被控对象传递函数中各部分传递函数如下: e-10s 干扰通道传递函数为:G f(s)G2(s)=15 (81)(10s1) s++ e-8s 系统被控部分传递函数为:G1(s)G2(s)=6 s++ (51)(10s1) 给定部分传递函数为:Gc(s)=1
2.1前馈控制系统整定。 由于采用前馈反馈分别整定方法,所以,前馈整定参数为:K d=-2.5, T dl=8。若系统采用PID控制,则系统结构框图如图: 2.1.1前馈-反馈复合控制系统方框图 2.2反馈控制系统前向通道稳定性分析。 系统稳定性分析是实验调试中正确把握试验方法、试验参数的基本依据。对2.1.1所示系统反馈环节中开环稳定性分析(不含PID调节器部分),为分析方便,取: 不含PID调节器的开环传递函数可近视写成:6 +++2 (3s1)(10s1)(5s1)
Altronic空燃比控制系统资料
Altronic, LLC – A Member of the HOERBIGER Group EPC-110/120/100E/150 SERIES Air/Fuel Ratio Control for Stoichiometric and Lean-Burn Carbureted Engines n Universal line of air/fuel ratio controls for stoichiometric and lean-burn engines n Accurate closed-loop control of air/fuel ratio for minimum engine emissions n Precise full-authority actuation using a range of piston and butterfly-style valves for positive control of fuel n Modbus-based EPC terminal program and expanded I/O available to implement advanced control strategies n Fully supports Modbus RTU communications with included PC monitoring software n CSA-certified for use in Class I, Division 2, Groups C and D hazardous areas The EPC-110/120/100E/150 Air/Fuel Ratio Controls are applica-ble to most carbureted natural gas-fueled engines. This universal line of emission control systems includes three specific models – two of them for stoichiometric applications using a catalytic converter (EPC-110/120 and EPC-100E), and a third model used exclusively on carbureted, lean-burn engines (EPC-150). The EPC control systems utilize microprocessor technology, thus allowing for the execution of sophisticated control strategies, and a high-level of application-specific customization. This advanced control and setup functionality is coupled with a complete line of precision, industry-proven fuel control valves. Taken together, these capabilities collectively assure the user of long-term air/fuel ratio stability and reduced engine exhaust emissions. While stoichiometric and lean-burn engines require fundamen-tally different oxygen sensing technologies, all EPC systems operate on the basis of closed-loop control to a setpoint utilizing data from an exhaust-mounted oxygen sensor as feedback. With the exhaust oxygen setpoint for lowest emissions entered into the controller, the EPC unit precisely controls the flow of fuel to the engine through the stepper motor valve(s) so as to maintain the target oxygen level during engine operation. The EPC controllers feature an alphanumeric LCD display which gives operators continual access to critical operating data without the need for non-hazardous area approved hand-held program-mers or PC’s. Controller operating mode, stepper motor control valve position(s), and exhaust oxygen sensor value(s) are just a few of the display-accessible parameters. To facilitate integration with supervisory monitoring and control systems, the EPC sys-tems fully support the ModBus RTU communications protocol. A full-featured PC-based monitoring and control software package is included with each system at no additional charge to the user.All EPC systems operate on DC-power, with a typical current draw of 1-3 amps (depending upon model). In remote areas or on applications without DC-power available, power can be pro-vided by the Altronic 24VDC Alternator Power Packages – refer to form ALT for further details. The entire EPC family of control products is certified by the Canadian Standards Association (CSA) as safe for use in Class I, Division 2, Group C and D hazardous areas. CERTIFIED CLASS I, DIVISION 2, GROUPS C and D
应用前馈-反馈复合控制机制创建企业安全文化(通用版)
Advocating a safety culture is to make human life and work safer and healthier under the existing technology and management conditions. (安全管理) 单位:___________________ 姓名:___________________ 日期:___________________ 应用前馈-反馈复合控制机制创建企业安全文化(通用版)
应用前馈-反馈复合控制机制创建企业安全 文化(通用版) 导语:倡导安全文化的目的是在现有的技术和管理条件下,使人类生活、工作地更加安全和健康。而安全和健康的实现离不开人们对安全健康的珍惜与重视,并使自己的一举一动,符合安全健康的行为规范要求。 1创建安全文化的意义 企业安全文化是全体员工共同遵守的行为准则,发挥着重要的作用它支配着人们的思维方式,规范着人们的行为习俗,约束着人们的情感抒发,左右着人们的审美趣味,规定着人们的价值取向,体现出强烈的终极关怀。 随着社会实践和生产实践的发展,人们发现尽管有了科学技术手段和管理手段,但对于搞好安全生产来说,还是不够的。科技手段达不到生产的本质安全,在安全管理上,要时时、事事、处处监督企业每一位职工遵章守纪,是一件困难的事情,甚至是不可能的事。安全文化却可以弥补安全管理手段的不足。 安全文化之所以能弥补安全管理的不足,是因为安全文化注重人的观念、道德、伦理、态度、情感、品行等深层次的人文因素,通过教育、宣传、奖惩、创建群体氛围等手段,不断提高企业职工的安全
前馈控制系统的基本原理
前馈控制系统 前馈控制系统的基本原理 前馈控制的基本概念是测取进入过程的干扰(包括外界干扰和设 定值变化),并按其信号产生合适的控制作用去改变操纵变量,使受 控变量维持在设定值上。图2.4-1物料出口温度θ需要维持恒定,选 用反馈控制系统。若考虑干扰仅是物料流量Q ,则可组成图2.4-2前 馈控制方案。方案中选择加热蒸汽量s G 为操纵变量。 图2.4-1 反馈控制 图2.4-2 前馈控制 前馈控制的方块图,如图2.4-3。 系统的传递函数可表示为: )()()()()(1S G S G S G S Q S Q PC ff PD += (2.4-1) 式中)(s G PD 、)(s G PC 分别表示对象干扰 道和控制通道的传递函数; )(s G ff 为前馈控 图2.4-3 前馈控制方块图 制器的传递函数。 系统对扰动Q 实现全补偿的条件是:
0)(≠s Q 时,要求0)(=s θ (2.4-2) 将(1-2)式代入(1-1)式,可得 )(s G ff =)()(S G S G PC PD - (2.4-3) 满足(1-3)式的前馈补偿装置使受控变量θ不 受扰动量Q 变化的影响。图2-4-4表示了这 种全补偿过程。 在Q 阶跃干扰下,调节作用c θ和干扰作用d θ的响应曲线方向相 反,幅值相同。所以它们的合成结果,可使θ达到 图2.4-4 前馈 控制全补偿示意图 理想的控制连续地维持在恒定的设定值上。显然,这种理想的控制性 能,反馈控制系统是做不到的。这是因为反馈控制是按被控变量的偏 差动作的。在干扰作用下,受控变量总要经历一个偏离设定值的过渡 过程。前馈控制的另一突出优点是,本身不形成闭合反馈回路,不存 在闭环稳定性问题,因而也就不存在控制精度与稳定性矛盾。 1.前馈控制与反馈控制的比较 图 2.4-5 反馈控制方块图 图 2.4-6 前馈控制方块图
汽车电子控制技术》习题(一)答案.pdf
《汽车电子控制技术》习题(一) 一、填空题 1. ABS控制器所依据的控制参数有车轮角减速度和滑移率。 2.电子制动力分配系统(EBD)由轮速传感器、电子控制器和液压执行器三部分 组成。 3.电子控制悬架系统主要有半主动悬架和主动悬架两种。 4.微机控制点火系统的实际点火提前角一般包括:初始点火提前角、基本点火提前角、修正点火提前角三部分。 5.怠速时,空调使用时的点火提前角比空调不使用时更大(更大、更小、一致)。 6.微机控制点火系统点火提前角的基本值是由曲轴位置传感器、凸轮轴位置传感器所决定。 二、名词解释 只读存储器 随机存储器 D转换器 数据模拟转换器,将模拟信号转换为数字信号然后被微处器接受。 电子控制发动机燃油喷射系统,简称燃油喷射系统。 型喷射系统 用叶片空气流量计取代了进气压力传感器,用空气流量作为控制喷油量的 主要因素。 三、简答题 1.汽车电子控制系统的基本组成及各部分的作用是什么 答:电子控制系统一般由检测反馈单元、指令及信号处理单元、转 换放大单元、执行器和动力源等几部分组成。(1)检测反馈单元:该单元的功能在于通过各种传感器检测受控参数或其他中间变量,经放大、转换 后用以显示或作为反馈信号。(2)指令及信号处理单元:该单元接收人机 对话随机指令或定值、程序指令,并接受反馈信号,一般具有信号比较、 转换、运算、逻辑等处理功能。(3)转换放大单元:该单元的作用是将指
令信号按不同方式进行转换和线性放大,使放大后的功率足以控制执行器 并驱动受控对象。(4)执行器:执行器直接驱动受控对象的部件,可以用 电磁单元,如电磁铁、电动机等,也可以用液压或气动元件。(5)动力源:动力源为各单元提供能源,通常包括电气动力源和流体动力源两类。 2.电子控制器有哪些基本组成部分各部分的基本功用是什么 答:电子控制器通常被简称为ECU,其基本组成有输入电路,微机,输出电路。输入电路作用:输入电路作用是将传感器,开关等各种形式的输入信号进行预处理,转换为计算机可接受的数字信号 系统的目的何在废气循环量与那些参数有关 答:废气再循环控制就是将发动机排出的部分废气引入进气管与新鲜的混 合混合后进入气缸,利用废气中所含的大量co2不参与燃烧却能吸收热量的特点,降低燃烧温度,达到减少NO2排放的目的;废气再循环与EGR 气体流量和吸入空气量有关。 4.什么是占空比R C 答:在一串理想的脉冲序列中(如方波),正脉冲的持续时间与脉冲总周 期的比值。 5、汽车电子控制悬架系统调节减震器阻尼的方法是什么 答:悬架阻尼大小的调节是通过改变减振器阻尼孔截面积的大小俩实现的。 6.简述电动助力转向系统的工作原理 答:首先,转矩传感器测出驾驶员施加在转向盘上的操纵力矩,车速传感器测出车辆当前的行驶速度,然后将这两个信号传递给ECU;ECU根据内置的控制策略,计算出理想的目标助力力矩,转化为电流指令给电机;然后,电机产生的助 力力矩经减速机构放大作用在机械式转向系统上,和驾驶员的操纵力矩一起克服转向阻力矩,实现车辆的转向。 7、氧传感器的作用是什么 .氧传感器:安装在排气管上。其功用是检测发动机排气中氧含量,并将氧含量 转变为电压信号传给ECU,ECU根据该信号判断实际空燃比,对喷油时间进行修正,实现空燃比反馈控制,将空燃比控制在理论空燃比附近,从而节约燃油和降低有害气体排放。
冷凝器温度前馈反馈控制系统设计与仿真
辽宁工业大学 开放性实验报告 题目:冷凝器温度前馈-反馈控制系统设计与仿真 院(系): 专业班级: 学号: 学生姓名: 指导教师:(签字) 起止时间: 2015.11.19—2015.11.22
辽宁工业大学实验室开放项目任务书 注:此表用于申请教学计划外的开放项目,请如实填写,由各院(系)汇总后统一办理,报实践教学科一份。
目录 第1章绪论 (1) 第2章控制方案介绍 (3) 2.1 概述 (3) 2.2 控制原理 (3) 2.3 实验内容 (4) 第3章系统设计与仿真 (5) 3.1 处理延迟环节 (5) 3.2 反馈控制系统设计 (6) 3.3 前馈控制系统设计 (8) 第4章课程设计总结 (11)
第1章绪论 冷凝器(Condenser) 空调系统的机件,能将管子中的热量,以很快的方式,传到管子附近的空气,大部分的汽车置于水箱前方。把气体或蒸气转变成液体的装置。发电厂要用许多冷凝器使涡轮机排出的蒸气得到冷凝;在冷冻厂中用冷凝器来冷凝氨和氟利昂之类的致冷蒸气。石油化学工业中用冷凝器使烃类及其他化学蒸气冷凝。在蒸馏过程中,把蒸气转变成液态的装置称为冷凝器。所有的冷凝器都是把气体或蒸气的热量带走而运转的。 对某些应用来说,气体必须通过一根长长的管子(通常盘成螺线管),以便让热量散失到四周的空气中,铜之类的导热金属常用于输送蒸气。为提高冷凝器的效率经常在管道上附加散热片以加速散热。散热片是用良导热金属制成的平板。这类冷凝器一般还要用风机迫使空气经过散热片并把热带走。一般制冷机的制冷原理压缩机的作用是把压力较低的蒸汽压缩成压力较高的蒸汽,使蒸汽的体积减小,压力升高。 压缩机吸入从蒸发器出来的较低压力的工质蒸汽,使之压力升高后送入冷凝器,在冷凝器中冷凝成压力较高的液体,经节流阀节流后,成为压力较低的液体后,送入蒸发器,在蒸发器中吸热蒸发而成为压力较低的蒸汽,从而完成制冷循环。 液体制冷剂在蒸发器中吸收被冷却的物体热量之后,汽化成低温低压的蒸汽、被压缩机吸入、压缩成高压高温的蒸汽后排入冷凝器、在冷凝器中向冷却介质(水或空气)放热,冷凝为高压液体、经节流阀节流为低压低温的制冷剂、再次进入蒸发器吸热汽化,达到循环制冷的目的。这样,制冷剂在系统中经过蒸发、压缩、冷凝、节流四个基本过程完成一个制冷循环。 制冷剂包括:氟里昂12(CF2Cl2)代号R12 氟里昂12是一种无色、无臭、透明、几乎无毒性的制冷剂,但空气中含量超过80%时会引起人的窒息。氟里昂12不会燃烧也不会爆炸,当与明火接触或温度达到400℃以上时,能分解出对人体有害的氟化氢、氯化氢和光气(CoCl2)。R12是应用较广泛的中温制冷剂,适用于中小型制冷系统,如电冰箱、冰柜等。R12能溶解多种有机物,所以不能使用一般的橡皮垫片(圈),通常使用氯丁二烯人造橡胶或丁睛橡胶片或密封圈。氟里昂22(CHF2Cl)代号R22 R22不燃烧也不爆炸,其毒性比R12稍大,水的溶解度虽比R12大,但仍可能使制冷系统发生“冰塞”现象。R22能部分地与润滑油互相溶解,其溶解度随着润滑油的种类及温度而改变,故采用R22的制冷系统必须有回油措施。R22在标准大气压力下的对应蒸发温度为-40.8℃,常温下冷凝压力
前馈反馈水箱控制系统
实用文案 课程设计 名称:前馈反馈水箱控制系统 系别:电气与电子工程系 专业:自动化 姓名:******* 学号:******** 指导教师:*******
河南城建学院 2010年12 月30 日·成绩评定· 指导教师评语:
课程设计成绩评定 目录 一设计方案的介绍 (4) 二、工艺流程 (5) 三、前馈反馈控制的理论 (5) 四、设仪器仪表的选型 (5) 1、控制装置的选择 (5) 2、监测仪表 (6) 3、控制阀的选型 (6)
五、测量与控制端连接表 (7) 六、参数的整定 (7) 1、静态放大系数K F的整定 (7) 2、控制器参数的选择 (8) 七、总结 (9) 八、参考文献 (10) 九、附录 一设计方案的介绍 设计采用前馈反馈控制来实现水箱的液位控制。其中前馈控制可以补偿干扰对被控变量的扰动,前馈控制之后产生的余差则可以通过反馈控制进行修正,达到要求的控制精度。被控变量为水箱的液位,控制变量为水的流量。 采用两个支路,其中第一个支路为主回路,包括一个水泵(采用变频器变频控制电机模拟流量扰动),涡轮流量计;第二个支路为控制补偿回路,包括一个水泵(输出流量恒定),电动控制阀。除此之外在反馈回路中还需要一个液位测量仪表和PID控制仪表一台。前馈控制在不考虑控制通道与对象通道延迟,而且支路一流量可以准确的测
量,需要一个PID 控制仪表。前馈控制信号和反馈控制信号通过一个加法器连接,实现对控制阀的控制。 二 工艺流程 水箱液位的控制主要是控制水箱中的液位在要求的精度范围内。 一号水泵作为动力源给水的输送提供动力,进入水箱。并用变频器控制一号水泵用来模拟流量上产生的扰动。 二号水泵为补偿回路提供动力,为水箱提供水补偿。当扰动产生后,通过前馈控制调节阀对扰动产生补偿。补偿后产生的余差再通过反馈控制控制调节阀进行调节。 前 馈 反 馈 系 统 结 构 框 图 1 前 馈 反 馈 控 制 系 统 原 理 图 2