上位机应用软件设计
4 错误!文档中没有指定样式的文字。硕士论文
1.1上位机应用软件设计
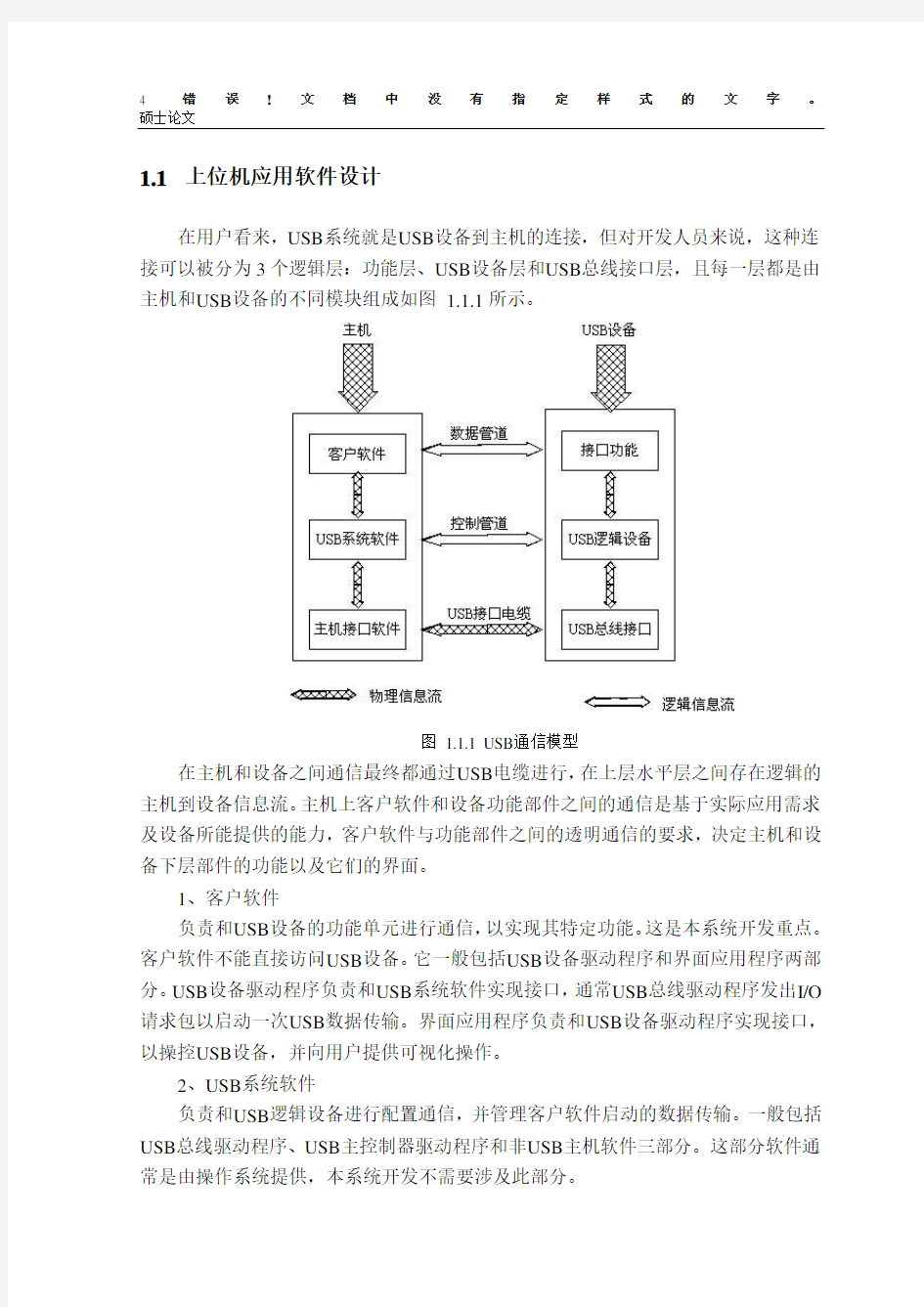
在用户看来,USB系统就是USB设备到主机的连接,但对开发人员来说,这种连接可以被分为3个逻辑层:功能层、USB设备层和USB总线接口层,且每一层都是由主机和USB设备的不同模块组成如图 1.1.1所示。
图 1.1.1 USB通信模型
在主机和设备之间通信最终都通过USB电缆进行,在上层水平层之间存在逻辑的主机到设备信息流。主机上客户软件和设备功能部件之间的通信是基于实际应用需求及设备所能提供的能力,客户软件与功能部件之间的透明通信的要求,决定主机和设备下层部件的功能以及它们的界面。
1、客户软件
负责和USB设备的功能单元进行通信,以实现其特定功能。这是本系统开发重点。客户软件不能直接访问USB设备。它一般包括USB设备驱动程序和界面应用程序两部分。USB设备驱动程序负责和USB系统软件实现接口,通常USB总线驱动程序发出I/O 请求包以启动一次USB数据传输。界面应用程序负责和USB设备驱动程序实现接口,以操控USB设备,并向用户提供可视化操作。
2、USB系统软件
负责和USB逻辑设备进行配置通信,并管理客户软件启动的数据传输。一般包括USB总线驱动程序、USB主控制器驱动程序和非USB主机软件三部分。这部分软件通常是由操作系统提供,本系统开发不需要涉及此部分。
3、USB总线接口
包括主控制器和根集线器两部分。根集线器为USB系统提供连接起点,主控制器负责完成主机和USB设备之间数据的实际传输。该模块与USB系统软件的接口依赖于主控制器的硬件实现[2]。
在USB系统中只允许一个主机,本系统主要分为3个不同模块:客户软件、USB 系统软件和USB总线接口。对于本弹丸速度测试系统来说,工作重点是放在客户软件即上位机应用软件的编写,包括USB设备驱动程序和用户端应用程序。
1.1.1上位机软件总规划
如上节所介绍的,上位机的软件主要包括两个方面:一方面是USB设备驱动程序,针对系统设计所使用的USB接口芯片,给系统提供完善的应用层操作接口;另一方面是本弹丸速度测试系统的用户端应用程序设计,负责和USB设备驱动程序实现接口,以控制USB设备,这方面也就是本节着重要介绍的。
整个软件采用MFC开发工具进行编写,界面简洁流畅,便于用户操作。
1.1.2CH375设备驱动程序
USB设备的开发需要计算机端的驱动程序,驱动程序文件图标如图1.1.2所示。
图 1.1.2 CH375驱动程序
由于USB设备属于PnP(即插即用)设备,因此当第一次插入CH375设备时,PnP 管理器能够自动检测硬件并分配I/O资源。系统初次使用该设备时,系统会提示安装驱动程序,这就是在上节提到的硬件查找。CH375WDM.INF包括了安装驱动程序的位置和信息,CH375DLL.DLL相当于给应用层的接口。
图 1.1.3 CH375头文件和库文件
上位机要进行数据传输,就需要用到接口函数,因此需要有相应头文件和链接库文件,如图 1.1.3所示。CH375DLL.H是USB总线接口芯片CH375的应用层接口库。在上位机程序和MCU程序中都要添加头文件CH375DLL.H和动态链接库。
1.1.3上位机用户端程序设计
1.1.3.1用户界面设计
用户界面是用户操作的平台,在设计时应在完成各功能同时需最大程度地做到简洁、美观、使用方便,主操作界面如图 1.1.4所示。
图 1.1.4 上位机主操作界面
下面介绍下主操作界面的各控件含义:
“系统初始化”:测试子对话框—“数据处理”运行是否正常,同时对各变量进行初始化。
“打开USB”:测试USB设备是否已连接。若USB设备未连接时,点击此控件后会弹出“打开设备失败”的提示框;若USB设备连接成功,点击此控件后则“USB设备信息”栏中会出现相应的设备信息和状态提示,同时速度上传框中上会显示“准备采集速度”字样,系统可正常进行USB通信。
“选择靶种”:本系统针对光电靶和天幕靶两种靶种(区截装置),在实际测试时可以现场实验情况选择靶种。系统初始默认的靶种为光电靶。
“确定”:即靶距确定键。当靶距根据现场测量输入完毕后,按“确定”键即将靶距传给下位机MCU为计算速度v提供L,下传过程中此控件不可用,下传成功后此控件恢复可用状态。
“靶距确认框”:测试下传到MCU的靶距是否正确。用户点击“上传”控件将靶距重新上传至上位机操作界面上相应的靶距确认框。如果上传靶距与输入的靶距不符时,需重新系统初始化,若相同则说明靶距输入正确,可进行下一步的操作。靶距正确下
传是整个系统正确测试弹丸速度的基础。
“上传速度”:当下位机LCD屏出现“请上传数据”字样,提示用户可进行上传速度操作,点击此控件后此发弹丸速度将会显示在速度上传框中。下一发弹丸射击结束后重复这个操作即可再次上传。
“原始文件保存”:保存未进行数据处理的文件,提供给用户原始测试报告,包括速度、动能、比动能等。
“数据处理”:是打开子对话框数据分析的界面,界面如图1.1.5所示。
图 1.1.5 上位机数据处理界面
数据分析操作界面上包括“ctrl列表”、“ctrl保存”、“3σ标准”控件。
“ctrl列表”:显示本次测试的所有弹丸速度、动能、比动能;
“3σ标准”:是根据3σ准则标记异常数据,用户根据标记自主剔除异常数据;
“ctrl保存”:为保存数据处理后的文件。
测试结束,原始文件和数据处理后的文件都保存完毕后,点击主界面的“结束关闭界面”退出。
图 1.1.6为上位机操作流程,用户可根据此流程图完成上位机测试操作。
图 1.1.6 上位机主流程图
1.1.3.2端对端的USB传输
CH375在计算机应用层与本地端单片机(MCU)之间提供了端对端的连接,有两种通信方式可供选择:单向数据流方式和请求应答方式。单向数据流方式使用两个方向相反的单向数据流进行通信,具有较高的数据传输速率,但是数据不容易同步;请求应答方式是使用主动请求和被动应答的查询方式进行通信,数据自动同步,具有较好的交互性和可控性,程序设计相对简单,但是数据传输速率相对较低[10]。
请求应答方式使用一个下传的主动请求和一个上传的被动应答进行交互式的双向数据通信,两者是相互对应的。主动请求是指由计算机应用层下传给单片机的数据请求,被动应答时指单片机收到数据请求后,上传给计算机应用层的应答数据,所有通信都是有计算机应用层发起,然后以接收到单片机的应答结束,
在操作主界面上提到的靶距“确认”、靶距“上传”、“上传速度”都是采用的的请求应答方式的USB传输方式。下面将做具体介绍。
HANDLE T2DHandle; //端点2下传设备打开句柄
HANDLE T1Handle; //端点1上传设备打开句柄
HANDLE T2UHandle; //端点2上传设备打开句柄
表 1.1.1 读写API函数
端点状态函数名函数内容函数作用
端点2下传CH375WriteData BOOLWINAPICH375WriteData(
ULONG iIndex,
PVOID iBuffer,
PULONG ioLength );
写出数据块,指定
设备号iIndex,将指
定数据长度
ioLength的数据写
入写入缓冲区
iBuffer,
端点1上传CH375ReadInter BOOL WINAPI
CH375ReadInter(
ULONG iIndex,
PVOID oBuffer,
PULONG ioLength );
读取中断数据,指
定设备号iIndex,读
取指定缓冲区
oBuffer中指定数
据长度ioLength的
数据
端点2上传CH375ReadData BOOLWINAPICH375ReadData(
ULONG iIndex,
PVOID oBuffer,
PULONGioLength );
写出数据块,指定
设备号iIndex,将指
定数据长度
ioLength的数据写
入写入缓冲区
iBuffer,
表 1.1.1为端点上传下传中使用到的CH375DLL.H头文件中的三个API函数,因此上位机主程序需添加此头文件#include "CH375DLL.H"。
1、靶距下传
靶距下传是使用端点2下传端点。当点击“确认”控件时,执行void CCH375UpDownDlg::OnButton2Down()代码段,程序流程图见图1.1.7。
程序主要语句如下:
mTrdDown2=AfxBegiThread(mThreadDown2,this,THREAD_PRIORITY_NORMAL,0,0, NULL);是建立端点2下传线程
CCH375UpDownDlg *pDlg = (CCH375UpDownDlg *)pParam;
memcpy(mBuf,pDlg->m_downdata2,datalen);//将要下传的数据传至mBuf
if(!CH375WriteData((ULONG)pDlg->T2DHandle,&mBuf[0],&dlen))
{
if ( !pDlg->m_close ) MessageBox(NULL,"端点2下传失败!如果设备断开过那么请先关闭本程序","DEBUG375",MB_OK|MB_ICONSTOP);
}
else{
char tem[50]="";
DownCount=DownCount+1;
sprintf(tem,"Down: %d",DownCount);
SetDlgItemText(pDlg->m_hWnd,IDC_DownCount,tem);
}//如果上传成功,则靶距确认次数加1,否则出现错误提示框
图 1.1.7 输入靶距下传软件流程图
图 1.1.8 上位机靶距下传框
如图 1.1.8 上位机靶距下传框,“5位”代表输入的靶距位数,如图中的“94700”代表的0.947m,“DOWN:3”表示这是本次测试第三次换靶距。本系统设计的靶距可输入5位或6位,因此靶距改变范围在0.1m~9.99999m。
2、靶距确认
靶距确认是采用了端点1上传端点。靶距确认上传和输入靶距下传思路基本相同,区别在于1、上传时读数据,下传为写数据;2、端点2下传缓冲区有64字节,端点1上传缓冲区为8字节。
软件编写思路为:
1、USB设备打开,数据长度在范围以内的情况下,打开端点1上传设备:
T1Handle=CreateFile((char*)&DeviceName[0],GENERIC_READ|GENERIC_WRIT E,FILE_SHARE_READ|FILE_SHARE_WRITE,NULL,OPEN_EXIS
TING,FILE_ATTRIBUTE_NORMAL,NULL);
2、打开端点1上传线程:
mTrdUp1=AfxBeginthread(mThreadUp1,this,THREAD_PRIORITY_NORMAL,0,0,N ULL);
3、启动线程成功后,将端点2下传的数据传至端点1上传缓冲区:
CH375ReadInter((ULONG)pDlg->T1Handle,&mBuf,&dlen);
4、读出数据至上位机操作界面靶距确认框:
sprintf(&buffer[j],"%01d ",mBuf[i]);
SetDlgItemText(pDlg->m_hWnd,IDC_EDIT1_UPDATA,buffer);
5、上传成功,退出线程。
图 1.1.9 上位机靶距上传确认框
图 1.1.8、图 1.1.9所示的靶距完全相同,说明下位机MCU接收到的靶距正确,系统可以开始等待正式测试。
3、上传速度
图 1.1.10 测试主界面
图 1.1.10 测试主界面是进行实弹气枪实验时的工作主界面,“上传次数UP:5”代表用户已经采集了5次速度,因此速度上传框中一共有5发弹丸速度。当LCD屏上显示“请上传”,每按一次“上传速度”键,速度列表框中即显示所上传的弹丸速度。具体软件流程见图 1.1.11。
图 1.1.11 上传速度流程图
关键程序语句:
memcpy(&DeviceName[0],CH375GetDeviceName(mIndex),sizeof(DeviceName));
T2UHandle = CreateFile( (char *)&DeviceName[0], GENERIC_READ | GENERIC_WRITE,FILE_SHARE_READ|FILE_SHARE_WRITE,
NULL, N_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL );
//打开端点2下传设备
CCH375UpDownDlg *pDlg = (CCH375UpDownDlg *)pParam;
if ( pDlg->T2UHandle != INV ALID_HANDLE_VALUE ) {//如果打开设备成功
if(CH375ReadData((ULONG)pDlg->T2UHandle,&mBuf[0],&dlen)){//如果将需上传的速度值成功写入端点2上传管道中,即传至mBuf[],则进行下一步工作for(i=0,j=0;i { sprintf(&buffer[j],"%01d ",mBuf[i]); j += 1; buffer[4]='.'; } buffer[j] = '\0'; //将上传到的速度值按一定格式传至buffer[] ShowUpdata(buffer,j);//将速度值显示在速度列表框中 char tem[50]=""; UpCount=UpCount+1; sprintf(tem,"Up: %d",UpCount); SetDlgItemText(pDlg->m_hWnd,IDC_UpCount,tem); } //每上传成功一次,UP次数加1, 在下位机MCU中测时模块得到的速度值v[]在数据上传端点2采用命令函数WR_USB_DATA7将数据上传至数据上传管道,点击“上传速度”键,调用void CCH372UpDownDlg::OnButton2Up()函数,启动端点2上传线程,线程成功启动后,上位机通过CH375ReadData()将函数读出速度值,假设速度值为2117.57m/s,则在下位机中数组v[]中存储的数据位[2 1 1 7 5 7],首先读出到数组buffer[]中的依然是[2 1 1 7 5 7],然后根据具体情况,弹丸速度最大不会超过10000m/s,因此buffer[4]必为小数点”.”,即buffer[0]~buffer[3]代表整数位,buffer[5]~buffer[6]代表小数点后的位数,然后将按照格式的速度值显示在速度列表框中,这一次速度上传结束,上传数加1,这也是弹丸采集数,也是为了方便用户获知本次测试已射击的枪弹数。 4、靶种选择 在整个主程序中涉及到下传的还有靶种选择,它是利用端点2下传通道进行数据的传输,软件设计是通过下传数据长度来判断上位机选择的是光电靶还是天幕靶,如果选择光电靶则下传一位数字,否则下传至MCU的是两位数字,下位机用RD_USB_DATA读出数据块长度后,根据长度值设置标志S17=0或是S17=1,然后根据硬件电路的设计,当S17=0时为选择光电靶,S17=1时为选择天幕靶。 1.1.3.3数据处理 在上传完所有的弹丸速度后,点击主界面的“数据处理”控件,进入如图 1.1.5 上位机数据处理界面。数据操作界面上包括:ctrl列表,3σ标准、ctrl保存这三个控件。下面将进行分别介绍。 5、控件介绍 1、ctrl列表 在主界面上用户可在范围内(≤100)任意设定子弹数n,点击“数据处理”键后,速度列表框(list control控件)会自动显示n列,如图 1.1.5所示,点击“ctrl列表”键后,在主操作界面上上传得到的速度值,以及随之计算出来的动能、比动能都会全部列表到list control框中,若主操作子弹数设为11,如果采集了11发子弹,则会出现11发子弹速 度值如图 1.1.12。若采集的次数只有9发,则第10和11发的各值均为0.000。 图 1.1.12 ctrl列表图 由于涉及到要从父对话框传递变量到子对话框的问题,首先需要调用父对话框指针:CCH375UpDownDlg*pMainDlg=(CCH375UpDownDlg*)AfxGetMainWnd();然后将父对话框变量传递给子对话框的相应变量:zidanshu=pMainDlg->m_zidanshu;这样就将父对话框的m_zidanshu传递给zidanshu,以便子对话框调用,类似这样的其它变量采用同样的方法进行调用。 将父对话框中的单个弹丸速度数组ve[]、单个弹丸动能E[]、单个弹丸比动能BE[]设为全局变量,速度数组的大小由采集的弹丸数UpCount来决定,子对话框中的速度数组直接调用ve[]、E2[]、BE2[]显示在速度列表框中: for (int i=1;i <=zidanshu;i++){ strNum.Format("%.3f",ve[i]); velocitylist2->SetItemText(i-1, 1, strNum);} 以上可将速度值列表如图 1.1.12所示,由于ve[]是double型,首先要转换成字符型的strNum[],然后用SetItemText将ve[]列表出来。动能和比动能列表方法是相同的。 2、3σ标准 在实验过程中,常常会出现在一组测量数据中,有个别的测得值会显得与众不同,它的数值或是特别大或特别小。对于这一类异常数据的测得值的处理,我们既不应当保留含有粗大误差的数据,也不能够随意舍弃对于误差分布规律来说是合理的那些含有大误差的测得值[7]。在实验过程中,如果只是因为某个测得值的误差不合主观意想,就把它剔除掉,这是没有科学根据,是不恰当的。 在本系统中对于误差的处理方法采用的是统计判断的方法。统计判断是根据误差的统计分布的规律来决定数据的取舍。随机误差的一个特点是极大地正、负误差出现的机会是极小的,根据误差的统计理论,可以科学地规定一个界限,认为大于这个界 限的误差,由于出现的几率很小,在实际测量中,实际上是不可能出现的。如果出现了超过规定的界限的误差,它必然不是产生随机误差的影响因素造成的,而是粗大误差的体现,因此,该测量数据应当舍弃。这就是统计判断的中心思想。由于规定的界限的不同,本系统中采用的统计判断方法是3σ标准。首先需要判断本次测量是否有超过±3S (S 为标准差)范围的异常数据,剔除异常数据后,对在范围以内的数据运用3σ标准,求出S 、σ等,图 1.1.13所示为剔除异常数据流程图。 图 1.1.13 判断异常数据流程图 图 1.1.13 判断异常数据流程图中所涉及到的变量计算公式如下: 速度平均值: n /)][(v 1∑==n i i v p 速度差: vp i v -=][vi 速度标准差: ∑--=n i vi n S 121 1 n S =σ 图 1.1.14 异常数据标注实例图 如图 1.1.14所示第6个弹丸数据的check box中打了√,说明此数据在本次测试中是在±3S范围以外的。具体判断如下:第1发弹:v1/S=-0.301511;第2发弹:v2/S=-0.301511;第3发弹:v3/S=-0.301511;第4发弹:v4/S=-0.301511;第5发弹:v5/S=-0.301511;第6发弹:v6/S=3.015118;第7发弹:v7/S=-0.301511;第8发弹:v8/S=-0.301511;第9发弹:v9/S=-0.301511;第10发弹:v10/S=-0.301511;第11发弹:v11/S=-0.301511;本次速度标准误差S=0.235480,则3S=0.706441。依次判断vi/S 是否在±3S范围内,如果不在此范围内,check box中打√作为标记,因此出现图中的第6个弹丸数据的check box中打了√,提醒用户该数据需要剔除,但剔除操作由用户自己完成,系统不进行自动剔除。 3、ctrl保存 ctrl保存是指保存经过3σ标准处理剔除可疑数据后保存的文件,见图1.1.15 数据处理后的保存文件。 关键语句:FILE *fp; fp=fopen(strFilePath,"w+"); for (int i=0;i <=count;i++){ string[i]=m_velocitylist2.GetItemText(i,0); string2[i]=m_velocitylist2.GetItemText(i,1); string3[i]=m_velocitylist2.GetItemText(i,2); string4[i]=m_velocitylist2.GetItemText(i,3); fprintf(fp3,"%s\t%s\t\t%s\t\t%s\t\t\n",string[i],string2[i],string3[i],str ing4[i]);} 如图 1.1.15所示,对速度、动能、比动能的最大值、最小值、平均值、极差值、标准偏差值进行计算,置信概率为95%,提供给用户一个比较完整的测试报告,为后续整个的弹丸速度情况分析提供了比较全面的文本资料。 图 1.1.15 数据处理后的保存文件 1.1.4本节小结 1、在软件设计过程中要注意全局变量和局部变量的使用,本系统中将速度、动能、比动能都设置为全局变量目的是使父、子对话框都能够调用这些变量,简化整个软件编写。 2、在编写USB数据传输部分时需对USB端点上传、下传的线程全面了解,注意编写流程是先打开USB设备然后启动上传或下传线程。 3、在进行数据误差分析功能调试时,出现的问题是不论速度值是差异多大,都 不会选中,后来读取平均速度(vp),发现读出来的是0,并没有速度值,是因为刚开始设计时vp设为全局变量,但这只有是在主对话框“保存原始文件”调用save函数才进行计算的,而测试习惯一般都是先进行数据处理,因此在子对话框中添加变量vp2使问题得到解决。 1.2本章小结 本章针对系统软件部分进行详细介绍,分下位机MCU功能模块程序、固件程序,上位机应用软件设计三方面。 下位机MCU完成测时、计算,外设显示、打印等功能,并实现了USB上下位机通信和通过USB端点进行数据传输;上位机完成速度值的上传、数据处理、误差分析、数据保存等一系列工作;同时在上位机主操作界面可进行靶距设置、靶种选择等一系列操作。本测速系统上下位软件的正确性在后来进行的模拟及实弹射击中得到了验证。 地坪打磨(研磨)机转速的详细说明 -------中国地坪/石材研磨机(打磨翻新机)转速问题广州美石机械龚智非 经常有客户在想购买12磨头(4磨盘)地坪研磨机时来电咨询我们公司的石材/地坪研磨机(打磨机),首先,就问到:你们美石12磨头机,多少转啊?我们的销售如实回答:电动机是4级的,1500转/分,机器的磨盘是:MS--500 是500转/分。MS-580是40 0转/分,MS-680是480转/分。然后,得到客户的回应是:你们机器太慢了,那不行,人家都是0-1500,有的还有2000多转。你们销售员都不专业,怎么能买机器啊?我们的销售员很是伤心,她说了真话,却被“打击得很深”。而那些忽悠客户的厂家一直忽悠达10多年以上,至今还在忽悠。为何能忽悠使他们的客户或准客户相信的呢?这又是一个怎样的情况呢?事实上说4磨盘12头机磨盘转速在900-转/分、0-1500转/分,0-1800转/分,2000转/分的厂家都是在忽悠客户! 在2013、2014连续两年的上海国际地坪展、国际清洁博览会上,我以客户身份咨询所有石材、地坪机械厂家12磨头机器磨盘转速有多快时,所有厂家的销售员,有的甚至是技术员都说是0-1500转/分,有的说是设备转速,有的说是输出转速。在此,我告诉大家,他们说的都是假话,在打擦边球,都是在忽悠客户。2016年5月,广东地坪展上,我同样还是以客户身份咨询同样问题时,几乎全部厂家都还是这样回答的:磨盘转速0-1500转。而只有一家叫天津康富斯地坪公司技术员回答他们机器时转速时是非常准确,具体就讲磨盘转速,非常有耐心解释,也非常专业,同时也在斥责其他所有机械厂家都在瞎说。但其书面数据说明没有看见,同时他们康富斯的12头机研磨机机器外形设计也非常独特。在2016 广东地坪展会上,还有某集团公司的销售员也是说她们的12头机磨盘转速就是0-1500转,她还说这说明书上有写啊,你看吧,我接着问,那你电机转速是多少呢?她说这个要等我们技术员来说,技术员来后,我重复问了一遍机器磨盘转速是多少,他说是0-1500转,这里电子屏上有显示啊!我紧接着又问那你电动机转速是多少,他望着我停了几秒说:“这个电机转速那我都不知道了,要问厂家。”我说电动机上不是明写着了吗?4级,1500转/分,他说,哦,那这个我都不懂了。可见,大集团公司的“技术员”都在装糊涂和忽悠客户。 在我国,自从10多年前12头(四磨盘)石材/地坪研磨机诞生至今,我们还没有见过真正1500转/磨盘12头的机器。 而在销售和宣传过程中,所有厂家的宣传资料都是这么写的(如下图)。其中,好多没有标明磨盘转数,就写转速或设备转速。有标磨盘转速的也是错误的。而当你咨询机器转数或机器磨盘转数时,他们告诉你0-1500转。而你认真时,他又说这是电机轴输出转数。好像要弄晕你一样 一、包装盒 manicure & pedicure 修指甲和修脚 variable speed 可变速度 rotary detail carver 旋转雕刻细节 multi-usa: 多用途 carving 雕 engraving 雕刻 routing 路由 grinding 磨削 sharpening 锐化 sanding 打磨 polishing 抛光 drilling 钻孔 and more 和更多的 10v adapter 10V适配器 variable speed from 3000~20000RPM 可变速度从3000 ~ 20000转速/分 double bearings design 双轴承设计 double insulated 双重绝缘 easy to use in any position 容易使用在任何位置 accepts all rotary tool accessories 接受所有旋转工具配件 lightweight design for precision operation 精密操作的轻量化设计 collet type: 套筒式: spring chuck type: 弹簧卡簧式: 二、说明书 mini polish nail machine微型抛光钉机specification:规范: power single phase,50-60hz,double lnsulated 功率单相,50-60赫兹,双重绝缘 rpm singte speed:20000 variable speed:3000~20000 转单一速度:20000 变速:3000~20000 collet collet type:2.4or3.2mm spring chuck type:0.3~3.2mm 夹头套筒式:2.4或3.2mm 弹簧夹头的类型:0.3~3.2mm dimensions 160mmL×24mm Diameter 尺寸160mm长×24mm 直径 safety rules:安全规则: 1、always unplug the tool when you change accessory or collet. 1、总是拔出工具当你更换配件或夹头。 2、do not engage the shaft lock button while the tool is running. 2、工具正在运行时,不要在轴上锁定按钮。 3、do not use the machine near water or place it in water.if motor falls into water, unplug it immediately and do not touch the water. 3、不要使用机器附近的水或地方它在水里。如果电机落入水中,立即拔下,不要碰水。 4、do not touch the bit or collet after using it because the bit and collet are too hot to be touched by bare hands. 4、使用后,不要用手触摸砖头夹,因为太热。 5、keep dust out of you eyes and lungs by using a protective eye wear or a dust mask. 5、用一种防护性的眼睛戴上或一个防尘罩,防止眼睛和肺部的灰尘。 6、always"unplug it"after using the machine. 6、使用机器后,总是“拔下它”。 电机上位机控制及界 面设计 电机上位机控制及界面设计 吴牛俊 (自动化与电气工程学院指导教师:周克宁) 摘要:随着计算机、电子、通讯技术的飞速发展,人们对于车间现场设备的运行管理控制,可视化操作等综合水平提出了新的要求。 为了满足这新的要求,本毕业设计本着“不在现场,远离现场”的原则,以C语言作为开发语言,VC为开发环境,针对某充电机产品编写了应用程序,将充电机的现场设备界面通过串口通信技术,与上位机界面有机的结合起来,以实现计算机的远程监控功能。此外,该上位机应用软件还实现了查看充电机存储在U盘中的运行记录文件的功能。 在本毕业论文通过这个项目的开发过程,阐述了编程环境的选择,串口通讯实现远程测试的方法,通过文件操作读取U盘数据的技巧。探讨如何在PC平台与工控机平台间建立远程测试和历史数据读取和分析的一般方法。 关键词:人机界面;串口通信;Visual C++6.0;文件操作 Abstract:With the development of computer, electronics, communications technology, the people are requiring that the the operation and management of the equipment control,and the Visualization operation must develop too. To meet these new requirements, the design of the graduates base on that "not on the scene, the scene away from the principle of" and use the C language and VC environment programming the charger procedures. The design uses the communications technology to put the charger field equipment interface and PC interface combination.And it can be achieved RMON. In addition, the PC application software also can view the test records stored in the U disk. This paper through the project development process describes the following points.First is The choice of programming environments.Second is Serial Communication remote test method.Third is the skills of reading the test records stored in the U disk.Discussion on general methods that through the PC platform with the establishment of industrial computer platform for remote testing and reading historical data and analysis Keywords:Human-machine interface; Serial Communication;;Visual C++6.0;File 1 绪论 VC++串口上位机简单例程(源码及详细步骤) (4.33MB) VC++编写简单串口上位机程序 2010年4月13日10:23:40 串口通信,MCU跟PC通信经常用到的一种通信方式,做界面、写上位机程序的编程语言、编译环境等不少,VB、C#、LABVIEW等等,我会的语言很少,C语言用得比较多,但是还没有找到如何用C语言来写串口通信上位机程序的资料,在图书管理找到了用VC++编写串口上位机的资料,参考书籍,用自己相当蹩脚的C++写出了一个简单的串口上位机程序,分享一下,体验一下单片机和PC通信的乐趣。 编译环境:VC++6.0 操作系统:VMWare虚拟出来的Windows XP 程序实现功能: 1、PC初始化COM1口,使用n81方式,波特率57600与单片机通信。PC的COM口编号可以通过如下方式修改: 当然也可以通过上位机软件编写,通过按钮来选择COM端口号,但是此次仅仅是简单的例程,就没有弄那么复杂了。COM1口可用的话,会提示串口初始化完毕。否则会提示串口已经打开Port already open,表示串口已经打开,被占用了。 2、点击开始转换,串口会向单片机发送0xaa,单片机串口中断接收到0xaa后启动ADC转 换一次,并把转换结果ADCL、ADCH共两个字节的结果发送至PC,PC进行数值转换后在窗口里显示。(见文章末尾图) 3、为防止串口被一只占用,点击关闭串口可以关闭COM1,供其它程序使用,点击后按钮变为打开串口,点击可重新打开COM1。 程序的编写: 1、打开VC++6.0建立基于对话框的MFC应用程序Test, 2、在项目中插入MSComm控件:工程->增加到工程->Components and Controls->双击Registered ActiveX Controls->选择Microsoft Communications Control,version6.0->Insert,按 深圳PLC编程、深圳上位机编、承接自动化项目深圳变频节能改造项目、自动化设备改造 与维修、PLC程序修改解密、上位机软件定制、免费提供自动化解决方案咨询。 1、工业过程控制系统: 提供西门子、S7-200, S7-300, S7-400,三菱FX1N FX2N,施耐德、欧姆龙、松下、台达、LG、AB 等主流PLC编程,研华、泓格模块、安装于防爆区域P+F turck、MTL远程I/O产品 选型、组态编程,各种通讯转换模块、HM I 、现场温度、压力仪表选型。为您的项目提供解决方案咨询,技术方案、投标协议图纸等制作、现场设备程序编写、组态、调试、用户培训验收等技术服务。 2、上位机软件: 软件根据您的项目需求可以提供LabVIEW、VC、VB 等软件平台,同时为了方便您对数据的 查询和处理,提供SQLSERVE R MySq卜嵌入式数据库SQLite等数据库系统,软件具备实时曲线、棒图、历史曲线、打印报表、企业内部局域网连接客户端实现联网查询功能,界面友好丰富。可更具具体需求开发相应功能。软件支持串口RS485\RS422\RS232以太网接口、 下位机包括PLC采集模块、各种智能仪表等。 组态软件编程:Wincc、iFix、组态王等应用范围各工控项目监控软件、仪表模块初始化调试软件、数据采集和仪器控制软件 3、变频节能改造项目:变频节能改造:水泵、风机、空压机、注塑机、中央空调、恒压供水等 VB/VC 等上位机软件开发 硫化机PLC上位机监控软件的开发 作者:佚名来源:本站整理发布时间:2009-6-17 13:16:00 [收藏][评论]随着硫化机自动控制水平的不断提高,硫化机的温度压力数据采集记录方法经历了圆盘记录仪、打点式记录仪、智能化无纸记录仪乃至目前较先进的上位机监控系统。上位机监控系统界面友好、控制安全可靠、精度高、数据存储量大,已越来越受用户青睐。笔者采用电阻式触摸平板电脑作为上位机,把现场数据通过传感器采集经PLC处理后送入上位机,组成一个 监控系统。 1监控系统构成 整个监控系统由A/ D模块、D/ A模块、CPU传感器、电气转换器、平板电脑组成,如图 1 所示。 上位机对数据进行分析、存盘、综合处理、打印、报警、图形显示、人机对话,并可通过数据传送对PLC进行控制。 2监控软件的设计 2.1 窗体设计在软件的编程过程中,人机界面(MM ,)非常重要,因为它直接与操作员产生信息交流,友好的人机界面要求能真实再现控制设备的状态以及准确的采集所需参数的数据,这主要依靠 HWT-12\25\50和面机 使用说明书 一、概述: 超群双速强力和面机具有造型美观,性能稳定,力量强劲,坚固耐用,效率高等特点。它利用高速转动的螺旋搅龙和低速运转的不锈钢缸体之间的差速,对面团进行推、拉、压、柔、使面团与各种原料充分混合及水化,提高面团吸水性增加面团筋力。为生产高质量的面包创造良好的条件。和面机也可用于搅拌其它食品。 二、安装、调试: 当您购买的和面机拆除包装后。请详细检查,是否有因运输或储存不当造成损坏,若有损坏请与七日内通知经销单位处理。 1、和面机应安装在干燥通风、无腐蚀和易燃易爆性物质的 室内。和面机要安装在平硬的地面上,地面需能承受 500公斤的压力,地面的倾斜角度不大于5度。和面机 里最近墙壁要不低于15厘米,便于工作时散热。 2、将随机及配备的四个地脚螺丝,放在和面机四个支脚的 开口内,螺杆上的两个螺母一个在支脚的上面一个在支 脚的下面。用扳手一次拧动地脚螺丝下面的螺母将和面 机顶起(至三个脚轮离地面5mm时为止)调平,再用 扳手将地脚螺丝上的两个螺母夹紧。 3、供电路连接。本机供电采用3-220v,电源线为3股电缆 线。和面机应单独接一30安培的空气开关,空气开关要求安装在和面机附近的墙壁上便于开关处。接线时外壳必须做接地保护,以防电击伤人。 4、调试。检查电源连接无误后。闭合空气开关,放下安全 网罩。按下正转低速按钮,此时搅龙转向应为顺时针旋转。如搅龙为逆时针旋转,轻调换电源线A、B、C中的任意两相。 注意事项: *急停按钮按下后自锁停机。再次启动时,向按钮蘑菇头上箭头的方向拧动按钮蘑菇头,按钮自动弹出复位。禁止直接向外拉按钮蘑菇头,否则会损坏按钮。 NCM-4.0型多功能垂直打磨机(说明书) NCM-4.0型多功能垂直打磨机,是一种适用于各种钢轨顶面、侧面和圆角的磨轨机械,并可用于道岔和仿形打磨。 一、主要技术性能及参数 1、电动打磨机:电压220V、380V;电机功率:1.5KM;转数2890r/min。 2、内燃打磨机:功率5.5ps,转速3600r/min。 3、磨头垂直行程:0-170mm,旋转角度±33o。 4、砂轮尺寸:254×35×30mm 5、整机重量:110㎏ 6、外型尺寸:2900×850×1150(mm) 7、适用于43-75㎏/m及各种轨型。 二、主要结构及工作原理 NCM-4.0型多功能垂直打磨机是以本田汽油机GX160作动力。用B型950三角带,通过传动系统带动砂轮进行磨轨作业。该机主要由机架、机芯、走行装置三大部分组成。机架系用无缝钢管焊接而成。机芯由传动系统、旋转装置及砂轮组成。砂轮旋转角度和进给量由手轮控制,走行装置和机架焊接为一体,走行轮为绝缘轮,且轮缘较高,下道后也可在地面上推行。先将磨轨机担跨在两面股钢轨上,再调整好砂轮进行给量和角度即可进行侧磨。是道岔和焊补轨面修磨的理想工具。 三、使用及保养注意事项 (一)使用 1、内燃机使用前要加注汽、机油,以免发生缸体爆缸现象,而损伤发动机。 2、在正常情况下一般拉绳3-5次即可起动。如未能起动,不要无休止地拉动 起动绳,应按汽油机故障内容逐项检查排除后在进行起动。 3、汽油机在空载起动,新汽油机开始使用要有一段磨合期。 4、由于现场作业风沙尘土较大,严禁在未装空气滤清器的情况下作业。 5、防止砂轮超过安全线速度350m/s,从汽油机上适当控制转 速,汽油机转速不得大于3300r/min。 (二)保养 1、汽油机放置时,放净汽油箱中的燃油,不得大于45o倾斜,以免机油流入燃烧室。 2、汽油机调整器室为飞溅润滑,每使用50h须检查调速室的油尺的高度(须将汽油机直立位置10-15r/min,待润滑油完全流回调速器室底壳内,再旋出油尺检查)。 3、汽油机输出轴端油封,经长期使用后,因密封不严能使调速器室的润滑油漏出,故使用500h后应予以更换。 4、使用30h后,加注机油2-3滴并润滑进给丝杆螺母。(三)注意事项 1、在调整砂轮横向(轨顶、圆角)位置打磨时,磨削量不易过大,以免发生汽油机闷车现象。 2、打磨时,用力要均匀,以免由于用力过猛损坏砂轮。 3、砂轮的实际旋转速度不得超过砂轮的安全线速度,操作者不要处在砂轮的旋转平面上。 4、如发生内燃机有异常现象,应立即停止作业,查清原因,排除故障后,再开机使用。未判明故障原因前不得开机使用。 5、在使用内燃机打磨时,注意加满汽、机油,操作时倾斜角度不大于45o。 6、重新加汽、机油时,必须停机,不得在火源处加油。 7、内燃机要按“用户操作手册”使用、保养。 MFC上位机软件设计 VC++串口上位机简单例程(源码及详细步骤) VC++串口上位机简单例程(源码及详细步骤) VC++串口上位机简单例程.rar (4.33 MB) VC++编写简单串口上位机程序 2010年4月13日10:23:40 串口通信,MCU跟PC通信经常用到的一种通信方式,做界面、写上位机程序的编程语言、编译环境等不少,VB、C#、LABVIEW等等,我会的语言很少,C语言用得比较多,但是还没有找到如何用C语言来写串口通信上位机程序的资料,在图书管理找到了用VC++编写串口上位机的资料,参考书籍,用自己相当蹩脚的C++写出了一个简单的串口上位机程序,分享一下,体验一下单片机和PC通信的乐趣。 编译环境:VC++6.0 操作系统:VMWare虚拟出来的Windows XP 程序实现功能: 1、 PC初始化COM1口,使用n81方式,波特率57600与单片机通信。PC的COM口编号可以通过如下方式修改: 当然也可以通过上位机软件编写,通过按钮来选择COM端口号,但是此次仅仅 是简单的例程,就没有弄那么复杂了。COM1口可用的话,会提示串口初始化完 毕。否则会提示串口已经打开Port already open,表示串口已经打开,被占用 了。 (a) to further cultivate and practice the socialist core value concept. Human civilization is the core and soul of the city. Created in deepening the urban civilization, to seize cultivation and practice the socialist core value concept of the fundamental task, to everyone talk about civilization, everywhere to see the civilization "as the goal, to promote the creation tasks implemented. First, we must deepen the Delhi City, good deeds sunshine" is the theme of moral practice, to build the brand of "Da Yi Ju, Houde good deeds" moral. Carefully create activity carrier, highlighting to create a theme, to carry out a wide range of "good side" recommended review activities, carry out moral model itinerant preachers and most beautiful people, the series of model characters selection Activities, aggressively push the tree to a group of people around to learn and amiable, respectable moral typical. To focus on the real refinement "good deeds for the four virtues list built, tubes, each link work; let the moral has become an important force for regulating the behavior of the citizens. A hand grasping the education, focusing on governance, the violation of public order, destruction of public facilities and other acts resolutely exposure. Second, we must deepen the activities to create a civilized. Actively carry out civilized units, township of civilization, civilized window created, and 3 基于VB6.0的上位机程序设计 内部培训资料(不得转载) 随着嵌入式系统在电子领域应用的不断深入,可视化的单片机控制与检测系统越来越成为单片机技术的应用热点。广泛应用到工业自动化生产、交通、医疗、教育和各种自动控制等领域,如心电监护、全方位视频跟踪监视。在这些复杂的数字系统中,计算机被称为上位机,通过上位机和相关的软件实现传感信号的检测和对外部设备的控制。利用计算机实现可视化的控制系统包括上位机程序设计、接口设计和单片机系统设计。 单片机相比较计算机而言又叫下位机,是直接对检测对象测量和控制的系统,有时也把接口与下位机设计在在一个系统中统称接口电路。基于计算机基础的上位机程序可以提高复杂的单片机控制系统的人机交互功能。 本项目设计的内容是一个简单的温度检测系统,上位机程序用来检测和显示单片机系统发送的数据,下位机是一个简单的温度检测系统,通过USB接口虚拟一个串口传输数据,上位机程序实时显示温度,并通过曲线的形式描绘出温度的变化过程。上位机程序VB6.0设计,程序执行后,上位机程序要定时向下位机即单片机系统发送指令,下位机在接到命令后就开始发送温度信息。上位机显示的温度曲线要能准确的表示当时的温度,误差不能超过5%,能过显示的温度范围在20摄氏度到80摄氏度之间。上位机程序两次接收的温度数据间隔控制在在1秒钟左右,能够显示的温度曲线的总时间在2分钟左右。 3.1 VB简单认识 VB是Visual Basic的简称,是由美国微软公司于1991年开发的一种可视化的、面向对象和采用事件驱动方式的结构化高级程序设计语言,可用于开发Windows 环境下的各类应用程序。今天我们以VB6.0为基础,简单的认识VB,然后我们就可以利用VB这个强大的开发工具去开发我们需要的各类程序。 3.1.1 VB6.0基本操作 在Visual Basic安装成功之后,安装程序自动在【开始】菜单中建立V isual Basic 6.0的程序组和程序项。单击【开始】按扭,指向【所有程序】选项,再指向【Microsoft V isual Basic 6.0中文版】程序组,单击【Microsoft V isual Basic 6.0中文版】选项即可启动V isual Basic6.0中文版。 在VB6.0启动后,屏幕上将出现如图3-1所示的启动界面,在启动界面中会出现一个【新建工程】对话框。 毕业论文 离心式压缩机的设计 姓名 院(系)机电工程学院 专业班级机械设计制造及其自动化081 学号 指导教师 职称 论文答辩日期 2012年5月20日 仲恺农业工程学院教务处制 学生承诺书 本毕业设计是在老师的指导下独立完成,没有抄袭别人的结果。毕业设计所采用的数据及原理除小部分是通过查找相关文献资料得到,其余数据都是来自计算,绝对没有捏造成分。本人郑重承诺:本人愿对文章负全部责任! 本人签名:二零一二年五月十日 摘要 (3) 1 前言 (5) 1.1 离心式压缩机技术现状和发展趋势 (5) 1.2 离心式压缩机发展方向 (6) 2. 离心压缩机气动参数计算 (8) 2.1 原始数据 (8) 2.2 进气道参数 (8) 2.3 压缩机叶轮参数 (10) 2.4 无叶扩压器段参数 (15) 2.5 叶片扩压器参数 (17) 2.6 蜗壳参数 (19) 2.7 压缩机参数校核 (19) 2.8 轴的强度校核 (20) 2.9 轴承和键的选择 (21) 2.10 轴承盖的参数计算 (21) 3 结论 (21) 参考文献 (22) 致谢 (24) 摘要 离心式压缩机的用途很广。例如氨化肥生产中的氮、氢气体的离心压缩机,空气分离工程、炼油和石化工业中普遍使用的各种压缩机,天然气输送和制冷等场合的各种压缩机。在动力工程中,离心式压缩机主要用于小功率的燃气轮机、内燃机增压以及动力风源等。 本课题研究的内容是设计一台离心式压缩机。叶轮和扩压器是离心式压缩机的关键部件,叶轮设计制造的好坏及其与扩压器的匹配将对压缩机的性能产生决定性的影响。 关键词:进气道叶轮扩压器 MTD—Ⅲ型 钻杆内外磨机 使用说明书 武汉华宇一目检测装备有限公司2014年11月26日 钻杆内外修磨机使用说明书 一、概述 本产品主要用于磨削钻杆内外对接焊缝。具有高效、安全、经济、操作方便等优点。 二、主要技术参数: 1、适用范围:Φ73—Φ140mm钻杆; 2、检测速度:5min(每根的一端); 3、中心高 1100mm 4、工作最大的行程 1100 mm 5、磨杆长度 900 mm 6、可用磨头直径及砂轮规格适用:89、101、12 7、139 mm直径(标准)钻杆内外磨 7、内磨、头转速 0-10000r/min(变频调速) 外砂带磨滚轮转速 2800 r/min 8、功率 6+3=9KW 9、电源三相交流380V 50HZ 10、辅助气源压力: 0.5mpa 11、耗气量 0.53/min 12、工作环境:一般环境,配收尘装置(乙方配置) 13、设备性能:能完成2 7/8″-5 1/2″的钻杆焊缝和加厚过滤带的修磨作业。 三、技术特点 1、采用高速旋转的砂轮(10000r/min)以一定的压力压在钻杆焊缝的内外飞边上打磨,与此同时,采用数控系统实现钻杆自身原地旋转并且沿钻杆轴向能小幅度往复摆动,从而实现内飞边打磨。 2、采用全自动控制柜导航,通过控制柜按键就能轻松完成钻杆打磨,操作简单易懂;安全方便。 3、采用精密导轨作为砂轮进出钻杆内孔的运动平台,保证具有较高的运动和定位精度,保证打磨效果的稳定均匀。 4、采用电磁和气浮联合压紧技术,确保打磨压力。 5、采用精密控制技术,确保打磨深度。 四、操作说明 1、在电源接好之后,把柜内所有的空开都推上去,保证通电线路正常的情况下。按“总启动”按钮,整个通电。 2、工况选择,“自动/手动”打磨。 手动模式: 选择“内横移电机”的“前进”或者“后退”,内磨的横移电机就前进或后退。 选择“外横移电机”的“前进”或者“后退”,外磨的横移电机就前进或后退。 选择“外磨压紧机构”的“压紧”或者“松开”,外磨的压紧机构就压紧或松开钻管。 选择“料架选择”的“上料”或者“下料”,钻杆上料或下料。 选择“内磨摆动”的“启动”或者“停止”,内磨的摆动电机就 前言 在我国采用斜井开拓方式的矿井中,随着矿井的不断开采和延伸,井下作业地点距离越来越长。长期以来,职工只能步行,把大量体力和时间消耗在过程中。为此应切实解决井下作业人员体力和时间的武功消耗,确保井下作业的工作和工程质量。目前随着科技水平的不断提高,许多矿井都选用架空人车负担煤矿人员的运输。 基于物联网的矿山井下架空人车系统的基本功能是通过无线传输对车厢进行实现监控,车厢内的工作人员可以在意外事故发生后按下紧急按钮通知地面主控制室采取有效措施,防止灾难发生。 本设计是以组态王软件做为矿井架空人车无线监控系统上位机,完成之后,可以实现对轿厢内情况的视频监控、语音通信、报警以与3播放等功能。控制室可以通过上位机来监控轿厢机内的情况以与和任何一个轿厢进行语音通信,以实现控制室对每个轿厢内状态的监控。 1概述 1.1矿用架空人车的概况 矿用架空人车为矿山长距离安全快速地人员运输提供了经济使用的解决方案。其工作原理类似于地面旅游索道,它通过电动机传动减速机上的摩擦轮作为驱动装置,以架空、无极循环的钢丝绳作为牵引承载,此钢丝绳靠尾轮张紧装置进行张紧和绳长调节,沿途采用托绳支撑,以维持钢丝绳在托轮间的贴合力;抱索器将乘人抱索器或物料箱与钢丝绳连接并循环运行,从而实现运送人员与物料的目的。其优势能长期运输,实现无人值守和远程智能监控运行,无需专门操作司机,维护工作量较少。这种矿用架空人车与斜井人车运输相比较,具有更安全使用、运送能力大、动力消耗小,设备结构简单、维护工作量小等优点,深受井下工人的欢迎,大大提高了井下辅助运输的效率。 与国内快速发展的煤矿采掘机械化水平相比,矿井辅助运输明显落后,已成为制约我国煤炭生产发展的主要因素之一。利用架空乘人装置运送井下人员,减少工人上下班的时间和体力消耗,对矿井的高产高效起到推动作用。 矿用架空人车的最新发展方向呈现大运量、高速度、集中控制、稳定安全等特点。具有大运量、连续运输、连续变坡拐弯的特点,而且运行可靠,易于实现自动化和集中控制,经济效益十分明显。地下矿用架空人车也是煤矿乘人装置最为理想的高效连续辅助运输设备,特别是煤矿高产高效现代化的大型矿井,地下矿用架空人车已成为矿井辅助运输机电一体化技术与装备的关键设备。随着高产高效矿井的发展,矿用架空人车的各项功能指标有了很大提高。 1.2 研究目的和意义 斜井人车是运送现场作业人员的重要设备,其工作性能既关系到安全生产,又影响设备的效率。传统的斜井人员运输,多是采用斜井绞车拖动斜井人车,工作效率低,影响行车安全的因素多,运行和维护成本高。因此,采用巷道内的架空运人缆车对原系统进行改造是一个理想的技术方案。缆车运人系统的电机功率远远小于绞车的电机功率,可节约大量的电能,降低运行成本,系统的结构简单,维护方便,并且能够连续工作,运人效率高。 Z-0.28/(20-76)-250 型天然气压缩机 使用说明书 ZNG20 (II ) ?SM 目录 一、用途和适用范围 二、主要规格及技术参数 三、压缩机的主要结构及工作原理 四、压缩机的安装 五、压缩机的装配及拆卸注意事项 六、压缩机的操作与使用 七、压缩机的油封和保管 八、运行故障与排除方法 九、主要配合件装配间隙 十、保证 十一、产品成套设备、随机工具、备品备件、文件清单 十二、随机安装图样 一、用途和适用范围 Z-0.28/(20-76)-250 型天然气压缩机(以下简称压缩机),是将气体压力为2-20MPa 的净化天然气(经母站压缩机压缩,净化的天然气)压缩到25MPa ,供气量为300-1350Nm/h (吸气压力为2.0?7.6MPa时),输入车载气瓶内作为燃料代替汽油使用的主要设备。 该压缩机对天然气气质的要求:不含游离水,硫化氢(HS)含量<15mg/Nrh低热值》31.4Mj/N m3,含尘量w 5mg/N m,总硫含量(以硫计)w 100mg/N m。 、主要规格及技术参数 (一)、压缩机 1 型号:Z-0.28/(20-76)-250 2、型式:Z型两级混冷活塞式 3、压缩介质:净化天然气 4、进气压力:2.0?20MPa 5、压缩机启动压力:2.0?17MPa 6、进气温度:w 30 E 7、排气压力:25MPa &排气温度:w 160C(冷却前);=环境温差+ 15C(冷却后) 9、排气量:0.28M/min 10、供气量:300?1350Nmh 11、含油量:w 5ppm 12、噪声:w 75dB(A)(箱体外1m处) 13、传动方式:直联 14、轴功率:w 72KW 15、电机功率:75KV,防爆等级:dllBT4 16、配电规格:50HZ 380V 17、启动与控制(PLC 该机为全自动,即自动启停,自动排污。主机软启动 注油器启动后,主机延时启动。 (二)、主电动机: 1、型号:YB315M-8 2、额定功率:75KW 3、转速:740r/min 4、电压:380V 大连理工大学 硕士学位论文 LED显示屏上位机软件的设计与实现 姓名:李立春 申请学位级别:硕士 专业:计算机技术 指导教师:孟军 20041007 摘要 随着电子、光电等技术的发展,人们对各种信息的需求量不断增加,中、大型LED显示屏作为信息载体广泛应用在银行、保险、车站、港口等公共场所。用来向人们传递信息。LED点阵式显示屏分两种,一种是显示固定信息(含循环显示),其特点是显示内容固定,结构简单,价格低廉,适合于路标等信息较少且不变化的场合。另一种是显示动态信息和图形(象),其特点是显示内容经常改变,既可显示动态信息,也可在线地编辑修改显示内容。本文所设计的电子显示屏采用三级微机控制结构。在介绍硬件原理的基础上,重点论述上位机软件结构及编程原理。 显示屏上位机软件设计是计算机图像处理的一个重要方向。课题的选取来源于企业对LED彩色显示屏的实际需求,本系统采用WINDOWS的API函数来实现图像的编辑和发送。通讯接口与存储文件的确定、文件的输入输出、图像的处理和发送是本课题的特色。 系统已实现的显示屏显示方式为图形方式,可显示文字、表格、图片等信息:彩色屏在显示文字或图表时可设置成阴影显示效果:每屏的动态效果、动态速度、暂停时间可由上位控制机编程任意设置;显示屏与上位机工异步工作,只是在更换显示信息时占用上位机资源,在信息正常显示时上位机可做它用。 本系统使用了显示屏实用运行机制,确定技术方案,按需求分析,整体设计,详细设计,编程和模块调试,测试和试运行的步骤来实现上位机软件的设计。系统用vB编写上位机图形编辑和发送软件,并介绍了整个硬件系统的构成。 关键词:LED显示屏:上位机;APJ:图象处理 目 录 目 录............................................................................................................2 第一章 绪论 (4) 1.1和面机概述 (4) 1.2和面机设计选择.....................................................................6 第二章 运动参数、动力参数的设计 (7) 2.1传动系统中传动链的设计及各传动比的分配设计..............................7 2.1.1搅拌浆转速.....................................................................7 2.1.2电动机的主要技术参数选择...................................................7 2.2计算各轴的转速........................................................................8 2.3计算各轴的功率........................................................................8 2.4计算各轴的转矩........................................................................9 第三章 结构设计 (9) 3.1皮带传动设计…………………………………………………………………9 3.1.1计算功率Pc ……………………………………………………………9 3.1.2V 带选型…………………………………………………………………9 3.1.3带轮设计………………………………………………………………9 3.1.4验算带速V ………………………………………………………………10 3.1.5求V 带基准长度d L 和中心距…………………………………………10 3.1.6小包角的计算……………………………………………………………10 3.1.7求带根数Z ………………………………………………………………11 3.1.8计算作用在带轮轴上的压力 Q F (11) 3.1.9带轮结构设计.....................................................................11 3.2蜗轮蜗杆传动结构设计 (12) 3.2.1选择材料 (12) 3.2.2选择蜗杆头数1z ,并估计传动效率.............................................12 3.2.3计算蜗轮转矩2T (12) 51单片机与上位机串口通信程序设计 1. 发送:向总线上发命令 2. 接收:从总线接收命令,并分析是地址还是数据。 3. 定时发送:从内存中取数并向主机发送. 经过调试,以上功能基本实现,目前可以通过上位机对单片机进行实时控制。程序如下: //这是一个单片机C51串口接收(中断)和发送例程,可以用来测试51单片机的中断接收 //和查询发送,另外我觉得发送没有必要用中断,因为程序的开销是一样的 #include< reg51.h> #include< stdio.h> #include< string.h> #define INBUF_LEN 4 //数据长度 unsigned char inbuf1[INBUF_LEN]; unsigned char checksum,count3 , flag,temp,ch; bit read_flag=0; sbit cp=P1^1; sbit DIR=P1^2; int i; unsigned int xdata *RAMDATA; /*定义RAM地址指针*/ unsigned char a[6] ={0x11,0x22,0x33,0x44,0x55,0x66} ; void init_serialcomm(void) { SCON=0x50; //在11.0592MHz下,设置串行口波特率为9600,方式1,并允许接收 PCON=0x00; ES=1; TMOD=0x21; //定时器工作于方式2,自动装载方式TH0=(65536-1000)%256; TL0=(65536-1000)/256; TL1=0xfd; TH1=0xfd; ET0=1; TR0=1; TR1=1; // TI=0; EA=1; // TI=1; RAMDATA=0x1F45; } void serial () interrupt 4 using 3 { if(RI) { RI=0; ch=SBUF; TI=1; //置SBUF空 switch(ch) { case 0x01 :printf("A"); TI=0;break; case 0x02 :printf("B"); TI=0;break; case 0x03 :printf("C"); TI=0;break; case 0x04 :printf("D"); TI=0;break; default :printf("fg"); TI=0;break; } } 产品说明书 4M8(3)-36/320型氮氢气压缩机沈阳气体压缩机厂 一概述 4M8(3)-36/320型氮氢气压缩机是一九七六年六月第三次全国小氮肥会议上选定的标 准型压缩机。本机用来装备年产10000-15000吨小氮肥厂极为适宜,也是小氮肥厂在一次和二次改造中应选的标定设备。 本机压缩介质为氮氢混合气。来自造气系统的半水煤气在0.26KG/cm2(表压)35℃的条件下进入压缩机的第一级。气体从最初压力0.26KG/cm2(表压)到320 KG/cm2(表压)分三段六级压缩完成。其中第一段分两级压缩,半水煤气从压缩机Ⅱ级气缸8.0 KG/cm2(绝压)的压力排出后,去变换碳化系统,经变换碳化后的气体变为碳化气。碳化气进入第二段压缩过 程,第二段经三级压缩后,碳化气从Ⅴ级气缸120KG/cm2(绝压)压力排出后,去铜洗系统,铜洗后的碳化气变成精炼气。精炼气进入最后一段的压缩过程。既进入压缩机的Ⅵ级气缸, 压缩到最终压力320 KG/cm2(表压)去合成系统。 压缩机排气量为36 M3/min,单机生产能力为5000吨/年,本机不仅适合以碳化煤球、煤和天然气为原料的双加压流程,对水洗流程也可以满足。本机虽然为320 KG/cm2流程设计,对于150-200 KG/cm2的流程也基本适应。 本机为四列六缸,六级压缩对动平衡M型压缩机。Ⅰ级气缸与Ⅳ-平-Ⅵ在机身左侧,Ⅱ级气缸与Ⅲ-平-Ⅴ级气缸在机身右侧。由于相对列的活塞相对运动,因此压缩机运行平稳, 安全可靠。 驱动压缩机的同步电机直接悬挂在曲轴一端,使压缩机的安装找正简单方便,而且结构 紧凑,占地面积小。 压缩机曲轴的另一端,装有棘轮式电动盘车机构,使每次大修后,开车前都能方便的完 成盘车动作。 为确保压缩机能长期安全运转工作,本机备有较为完善的安全保护信号和联锁装置,当 压缩机处于危险功况时,一般的能自动发出声光报警信号,若不能及时排除故障,能自动停 车。 本机备有缓冲器,冷却器,分离器等全套附属设备 压缩机的主辅机既可分双层布置,又可为平面布置。当为双层布置时,既压缩机的主机 布置在二层楼上,辅机及其辅属设备布置在楼下,这样布置使机房清晰明亮。若为平面布置 时辅机的全部或一部安装在机房之外,气水油管路均在地沟内。我们认为对于本机来说,双 层布置有更大的优越性。地坪打磨机转速的详细说明
电动打磨机说明书翻译
电机上位机控制及界面设计知识讲解
VC++_串口上位机编程实例
上位机监控软件的开发
H系列和面机使用说明
NCM-4.0型多功能垂直打磨机(说明书)
MFC上位机软件设计
基于VB的上位机程序设计说明
离心式压缩机的设计说明书
打磨机说明书
上位机设计方案
压缩机说明书
LED显示屏上位机软件的设计与实现
和面机结构设计
51单片机与上位机串口通信程序设计
4M8(3)压缩机说明书要点