信号与系统 杨晓非版 复习大纲

第一章
1.信号的定义
2.信号的描述形式
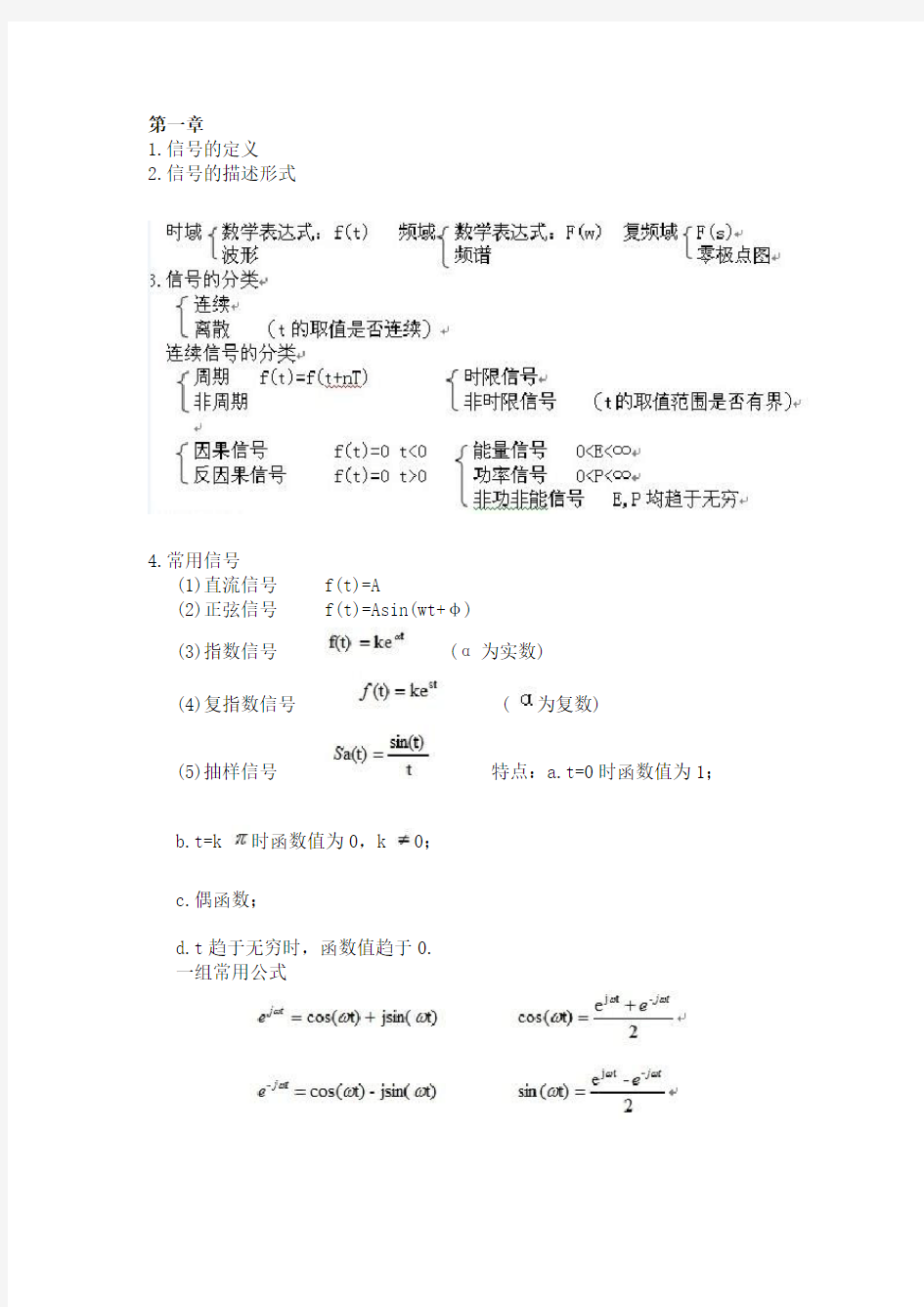
4.常用信号
(1)直流信号 f(t)=A
(2)正弦信号 f(t)=Asin(wt+φ)
(3)指数信号 (α为实数)
(4)复指数信号 ( 为复数)
(5)抽样信号特点:a.t=0时函数值为1;
b.t=k 时函数值为0,k 0;
c.偶函数;
d.t趋于无穷时,函数值趋于0. 一组常用公式
奇异信号
1.单位阶跃信号
u(t)= 1 t>0
0 t<0 单边特性(门函数,窗函数,函数的正轴部分的表示)(2)单位冲激函数
(3)单位冲激偶
(4)符号函数
(5)单位斜变函数
5.信号的运算
信号自变量的变换: 时移 f(t)---f(t- )
反褶 f(t)---f(-t)
尺度变换 f(t)---f(at)
信号的整体运算:乘常数 Af(t)
微分突出变化快的部分
积分使信号变得平滑
两信号之间的运算:相加
相乘调制,抽样
6.信号的分解
(1) 直流+交流
为的平均值,
(2)对实信号而言
其中
(3) 用冲激函数表示
如果f(t)为因果信号,用阶跃函数表示
(4)对于复函数而言
其中
(5)正交函数分量
傅里叶级数,傅里叶变换
7.系统的定义
8.系统模型的定义以及描述
描述数学表达式
图形方框图
信号流图
9.系统的分类
(1)线性系统的定义以及判别方法
定义:同时具有叠加性、齐次性
当时,
若,则系统为线性系统
判定方法:根据定义
(2)时不变系统的定义及判别方法
定义:响应与激励施加到系统的时刻无关
若时,有
则系统为时不变系统
判别方法:根据定义
(3)因果系统的定义及判别方法
定义:系统在时刻的响应只与时刻及之前的激励有关,即响应出现
在激励之后
判别方法:a.定义
b.若系统为线性时不变系统(LTIS),则它是因果系统的冲要条件为
(4)稳定系统的定义及判别方法
定义:有界输入有界输出 BIBO
若,有其,则系统为稳定系统
判别方法:a.定义
b.对于线性时不变系统(LTIS),
①系统稳定的充要条件为:
②若系统为因果系统,则其稳定的条件为:系统函数的极点全部在S域的左半平面
③若系统为因果系统且状态方程已知,则其稳定的条件为:系数矩阵A的特征值全部在S域左半平面
c.根据h(t)在t趋于无穷时的情况判定:
①稳定系统
②临界稳定系统是非0常数或者呈等幅振荡
结合H(s)极点位置考虑
③不稳定系统
结论:稳定性是系统自身的性质之一,与激励信号的情况无关10.线性时不变系统的性质
第二章连续时间系统的时域分析
一、根据电路建立输入输出方程
二、求解微分方程求系统的全响应
三、零输入响应的求解
四、零状态响应的求解
五、系统的单位冲激响应和阶跃响应
1.h(t) g(t)
2.计算h(t)
a.根据微分方程求h(t)
b.
c.由定义确定
3.h(t)的应用
a.
b.利用h(t)可以判断线性时不变系统(LTIS)的因果特性及其稳定性
c.利用h(t)可以判断系统是否可逆
若,则系统是可逆的,且表示逆系统的冲击响应4.h(t)与g(t)的关系
六、卷积积分
1.定义
2.性质
交换律
分配率
并联系统
结合律
级联系统
微分性质
积分性质
微积分性质联合使用
使用条件
时移性质若,则
与的卷积
七、起始点的跳变(从状态到状态)
1.定义
2.判断有无跳变
a.根据电路
b.已知微分方程
第三章傅里叶变换
一、周期信号的傅里叶级数
1.数学形式
a.三角函数形式
b.指数函数形式
其中成为傅里叶级数系数2.周期信号频谱的特点
离散性、谐波性、收敛性
3.周期信号的对称特性和它的傅里叶级数系数之间的关系
注:奇谐函数偶谐函数
f(t) 傅氏级数系数不包含分量
偶函数正弦函数分量
奇函数直流分量、余弦函数分量
偶谐函数(k为奇数) 基波分量、奇次谐波分量
奇谐函数(k为偶数) 直流分量、偶次谐波分量
二、非周期信号的傅里叶变换
1.定义
其中F(w)一般为复函数幅度谱
相位谱
b.常用周期信号的傅里叶变换
c.一般周期信号的傅里叶变换
2.傅里叶变换的性质
线性性质
时移性质
第五章傅里叶变换的应用
一、系统函数
1.定义:
2.物理意义:
3.求法:
(1)从H(s),因果稳定系统,
(2)从h(t),
二、体统物理可实现条件
1.时域充要条件
2.频域佩利维纳准则必要条件
三、无失真传输条件和理想低通滤波器
1.信号失真(幅度失真,相位失真)
2.无失真传输
(1)含义:系统的响应与激励相比,只有幅度大小和出现时间上有所不同,波形形状没有变化。
(2)条件:时域:,均为常数
频域:
3.理想低通滤波器
(1)定义:
(2)理想低通的h(t)
(3)单位阶跃响应
上升时间
四、信号的抽样与抽样定理
1.抽样的概念
2.理想抽样
3.矩形脉冲抽样
P(t) 周期矩形脉冲信号
4.抽样定理
奈奎斯特频率
奈奎斯特间隔
五、调制与解调
调制
解调
第四章拉普拉斯变换系统的S域分析
拉氏变换
1.单边拉氏变换的定义
2.拉氏变换的收敛域,使F(s)存在的的取值范围
3.常用函数的拉氏变换
4.拉式逆变换的计算
5.拉氏变换的性质
二、线性系统的S域分析
1.电路元件的S域模型
R,L,C,级联及并联两种模式
2.系统的S域分析
(1)分别求系统的
(2)用拉氏变换求解微分方程
(3)根据电路的S域模型写S域方程,求响应
三、系统函数H(s)
1.定义 0状态响应
2.H(s)的求法
(1)
(2)由电路S域模型按定义求
(3)由微分方程两端取拉式变换
(4)由系统框图计算
(5)由信号流图计算
(6)由状态方程求
3.H(s)的一般形式及零极点图
4.H(s)的应用
(1)由H(s)求
(2)对给定输入计算
(3)根据H(s)的极坐标确定自由响应的函数形式
(4)分析H(s)的极点(决定形式),零点(决定幅度和相位)分布对h(t)的影响
(5)由H(s)的极点分布分析系统的稳定性
(6)根据系统函数H(s)写出微分方程
(7)根据系统函数求因果稳定系统的
(8)根据H(s)求系统的稳态响应
第十二章状态变量分析
一、状态方程的列写
1.由电路图列写
2.由系统框图或信号流图列写
3.由系统的微分方程列写
二、状态方程的求解
1.用拉普拉斯变换法求解
2.由状态方程求系统函数H(s)
3.由状态方程确定系统的自然频率,也就是H(s)的极点,计算特征方程的根
三、可控性和可观性
1.可控性与可观性的定义
2.可控性与可观性的判断
一、关于能量信号与功率信号
在一定时间间隔里,把电阻施加在一电阻负载上,负载中就消耗一定的信号能量。若电阻取
归一化值为1 ,则信号的能量则为信号的平方值在该时间间隔上的积分,把这能量值对
于该时间间隔取平均值,即可得到在此时间内的信号的平均功率。
现在令时间间隔趋于无限大,则:
1.若信号总能量为有限值,平均功率为0,称其为能量信号,其能量
2.若信号平均功率为有限值,总能量为无限大,称其为功率信号,其平均功率
一般的,周期信号都是功率信号。
非周期信号:a.持续时间有限,则为能量信号。
b.持续时间无限但幅度有限,则为功率信号。
c.持续时间无限且幅度无限的,既不是能量信号,也不是功率信号
二、关于线性与非线性
线性:若
则
判断方法:将代入系统微分方程左边,
代入右边,
检验两边是否相等,相等即为线性,否则为非线性。
在解题时,对于同一系统的不同输入,是不变的,而具有线性。
三、关于时变与时不变
时不变:若
则
判断方法:在实际中,参数不随时间变化的系统,其微分方程的系数全部是常数,即恒定参数系统(定常系统)是时不变系统。
四、关于因过于非因果
因果性:输出由输入引起,输出不能领先于输入。
因果系统:任何时刻的输出仅仅决定于现在与过去的输入,与将来的输入无关。
例:因果:
非因果:
五、关于微分方程的解(经典解法)
完全解= 齐次解+ 特解
完全响应= 自由响应+ 受迫响应
A.齐次解的求解
(1)写出齐次方程,即令系统微分方程右端激励及各阶导数为0。
(2)写出特征方程
(3)求解上面方程的特征根:
(4)根据特征根写出齐次解
a.对于每一单根,给出一项
b.对于k重实根,给出k项
c.对于一对单复根,给出两项
d.对于一对m重复根,给出2m项
B.特解的求解
(1)根据激励的形式写出特解
(2)将与分别代入方程左右两边,对应次幂系数相等,即可确定
a.若,可设
b.若,可设
c.若,则①a不是特征根时,可设
②a是特征单根时,可设
③a是k重特征根时,可设
d.若,可设
e.若,则
①不是特征根时,可设
②是特征单根时,可设
C.完全解
完全解,其中中的待定系数应在完全解中由给定的附加初始条件确定。
(1)若0点无跳变,,直接用已知即可。
(2)若0点有跳变,需先求出,注意此处与不相同,不可混用。
六、关于零输入响应与零状态响应
A.零输入响应
在零输入条件下,微分方程右边为0,为齐次方程。故零输入响应由该方程的齐次解得到,齐次解中的待定系数由给定的初始条件在齐次解中直接确定。
由于输入为0,故0点无跳变,。
B.零状态响应
初始状态为零而输入不为零的条件下,微分方程仍是非齐次方程,故零状态响应由方程
的全解得到,其中齐次解的系数应由在全解中确定。
由于初始状态为0,故,与无关。
若0点无跳变,则;若0点有跳变,则先确定,再计算系数。
对于线性时不变系统,
七、关于零状态响应与全响应
二者均是由微分方程的完全解得到,所不同的是确定待定系数时所用的条件与
不同。这是由于恒为0,而由系统决定。这二者的区别不容易理解也容易忘记,所以大家一定要理解透彻,可以参照课本的例题去理解,详见郑君里版《信号与系统》例2-5,例2-6,例2-8。
八、关于初始条件的确定
A.冲激函数匹配法(解题速度快)
B.奇异函数平衡法(容易理解上手快)
这两种方法书上都有相应例题,要求大家必须掌握至少一种方法。
九、关于冲击响应
以单位冲激信号作为输入的零状态响应,记为。
由于及其各阶导数在时都为0,因此在时,方程右边恒为0,故
在时的模式与齐次解相同,所以求冲激响应的问题就转化为:a.求时的初始条件;
b.求初始条件下的齐次解。(特解为0)
十、关于阶跃响应
以单位阶跃信号作为输入的零状态响应。
求法:a.以传统方法求零状态响应。(特解不为0)
b.对求积分。
一、关于周期信号的傅里叶级数
A.三角形式(周期为T,角频率)
B.三角形式中的幅度谱和相位谱
(1)振幅是频率的偶函数,对的关系绘成频谱图即为幅度频谱。
(2)相位是频率的奇函数,对的关系绘成频谱图即为相位频谱。
C.指数形式
D.指数形式中的幅度谱和相位谱
二、关于对称性
三、关于周期信号的频谱
A.特点
离散性、谐波性(谱线只出现在基波频率的整数倍频率上)、收敛性B.周期矩形脉冲的频谱
脉冲幅度为A,脉冲宽度为,重复周期为T,则
(1)由谐波性可知,相邻谱线间隔即为基波频率
(2)
(3) 是的整数倍,即是的整数倍时,振幅为0。
(4)频带宽度。
C.一般周期信号的频谱
(1)T增大,频谱变密,振幅变小
(2) 减小,频谱收敛速度变慢,振幅减小
(3)频带宽度:对于信号能量主要部分集中在低频分量的情况,把从0频率开始到频谱包络
线第一次过零点的那个频率之间(或到频谱振幅为包络线最大值频率之间)的频带定义
为信号的频带宽度
(4)时间函数中变换较快的信号必定具有较宽的频带
(5)一切脉冲信号的脉宽与频宽B是成反比变换的
四、关于非周期信号的傅里叶变换
正变换
逆变换
是的频谱函数,可以写作
其中,
五、关于周期函数的傅里叶变换
周期信号周期为,角频率,从中截取一个周期,得到单脉冲信号
,其傅里叶变换为,
将展成傅里叶级数
则
的求法:
单脉冲的频谱是连续的,周期信号的频谱是离散的
嵌入式人体步态自动识别系统
嵌入式人体步态自动识别系统 早期的医学研究指出: 人的步态中有24种不同的成分,如果把这24种成分都考虑到,则步态是为个体所特有的。有关研究人员近些年来通过对人的步态分析,已经得出了在步态视频序列中含有人的身份信息,因此进行步态识别也是一种非常重要的生物识别技术。步态识别是近年来越多的研究者所关注的一种较新的生物认证技术,它是通过人的走路方式来识别人的身份。基于步态的身份认证识别技术相对于其它生物识别技术有如下优点: 远距离识别、识别对象的被动性、不易被隐藏、不易被察觉、应用领域广阔等,步态识别技术最近已经备受关注,并且已经取得了一些初步成果。如美国国防部研究项目署(DARPA)2000年的重大项目一HID(human identification at adistance)计划,其目的就是开发多模态视觉监控技术以实现远距离情况下人物的检测、分类和识别。中科院自动化研究所模式识别国家重点实验室近年也开始了对步态识别的研究,而且创建了NLPR步态数据库。虽然步态识别是一个新兴的研究领域,但是近年来已经涌现出了一些尝试性的工作。最早提出步态识别算法的是Niyogi与Adelson等人。Cunado和Nixon等人提出了一种基于模型的特征提取分析方法,VHT(velocity hough transform)。Kale等人将行人的外轮廓宽度作为图像特征,提出了一种依赖于角度的识别方法。而Johnson和Bobick 提出了一种不依赖于角度的步态识别算法。Sarkar等人提出了步态识别的基线算法。Lee等人提出了一种基于步态外形的表达方法,其具体做法是先将人体的各个部分映射到几个椭圆组成的模型上,然后用其质心位置和离心率作为步态特征来进行步态识别。Wang等人提出了一种简单有效的、基于人体运动轮廓的识别算法。值得注意的是,步态识别的研究尚处于初级阶段,表现在: a.实验都是在特定的环境下进行的,比如相对简单固定的背景,人相对于摄像机侧面行走,摄像机固定不动等;b.算法的评估都是在小样本数据库上进行的,而且数据库也不规范。迄今为止,针对步态识别所进行的研究几乎全部是基于PC机的,而在许多情况下,却需要非PC机环境,所以研究基于嵌入式平台的步态识别系统,具有一定的工程意义。本系统的功能是对采集到的步态视频序列进行图像处理,得到视频序列中的人体步态信息,再由步态算法根据
信号与系统期末考试试题(有答案的)
信号与系统期末考试试题 一、选择题(共10题,每题3分 ,共30分,每题给出四个答案,其中只有一个正确的) 1、 卷积f 1(k+5)*f 2(k-3) 等于 。 (A )f 1(k)*f 2(k) (B )f 1(k)*f 2(k-8)(C )f 1(k)*f 2(k+8)(D )f 1(k+3)*f 2(k-3) 2、 积分 dt t t ? ∞ ∞ --+)21()2(δ等于 。 (A )1.25(B )2.5(C )3(D )5 3、 序列f(k)=-u(-k)的z 变换等于 。 (A ) 1-z z (B )-1-z z (C )11-z (D )1 1--z 4、 若y(t)=f(t)*h(t),则f(2t)*h(2t)等于 。 (A ) )2(41t y (B ))2(21t y (C ))4(41t y (D ))4(2 1 t y 5、 已知一个线性时不变系统的阶跃相应g(t)=2e -2t u(t)+)(t δ,当输入f(t)=3e —t u(t)时,系 统的零状态响应y f (t)等于 (A )(-9e -t +12e -2t )u(t) (B )(3-9e -t +12e -2t )u(t) (C ))(t δ+(-6e -t +8e -2t )u(t) (D )3)(t δ +(-9e -t +12e -2t )u(t) 6、 连续周期信号的频谱具有 (A ) 连续性、周期性 (B )连续性、收敛性 (C )离散性、周期性 (D )离散性、收敛性 7、 周期序列2)455.1(0 +k COS π的 周期N 等于 (A ) 1(B )2(C )3(D )4 8、序列和 ()∑∞ -∞ =-k k 1δ等于 (A )1 (B) ∞ (C) ()1-k u (D) ()1-k ku 9、单边拉普拉斯变换()s e s s s F 22 12-+= 的愿函数等于 ()()t tu A ()()2-t tu B ()()()t u t C 2- ()()()22--t u t D 10、信号()()23-=-t u te t f t 的单边拉氏变换()s F 等于 ()A ()()()232372+++-s e s s ()() 2 23+-s e B s
信号与系统习题答案
《信号与系统》复习题 1. 已知f(t)如图所示,求f(-3t-2)。 2. 已知f(t),为求f(t0-at),应按下列哪种运算求得正确结果?(t0和a 都为正值) 3.已知f(5-2t)的波形如图,试画出f(t)的波形。 解题思路:f(5-2t)?????→?=倍 展宽乘22/1a f(5-2×2t)= f(5-t) ??→?反转f(5+t)??→?5 右移 f(5+t-5)= f(t) 4.计算下列函数值。 (1) dt t t u t t )2(0 0--?+∞ ∞-) (δ (2) dt t t u t t )2(0 --?+∞ ∞-) (δ (3) dt t t e t ?+∞ ∞ --++)(2)(δ
5.已知离散系统框图,写出差分方程。 解:2个延迟单元为二阶系统,设左边延迟单元输入为x(k) 左○ ∑:x(k)=f(k)-a 0*x(k-2)- a 1*x(k-1)→ x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) 右○ ∑: y(k)= b 2*x(k)- b 0*x(k-2) (2) 为消去x(k),将y(k)按(1)式移位。 a 1*y(k-1)= b 2* a 1*x(k-1)+ b 0* a 1*x(k-3) (3) a 0*y(k-2)= b 2* a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2)、(3)、(4)三式相加:y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b 2*[x(k)+ a 1*x(k-1)+a 0*x(k-2)]- b 0*[x(k-2)+a 1*x(k-3)+a 0*x(k-4)] ∴ y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b 2*f(k)- b 0*f(k-2)═>差分方程 6.绘出下列系统的仿真框图。 )()()()()(10012 2t e dt d b t e b t r a t r dt d a t r dt d +=++ 7.判断下列系统是否为线性系统。 (2) 8.求下列微分方程描述的系统冲激响应和阶跃响应。 )(2)(3)(t e dt d t r t r dt d =+
傅里叶变换在信号与系统系统中的应用
河北联合大学 本科毕业设计(论文) 题目傅里叶变换在信号与系统中的应用 院系理学院 专业班级07数学一班 学生姓名刘帅 学生学号200710050113 指导教师佟玉霞 2011年5月24日
题目傅里叶变换在信号与系统中的应用 专业数学与应用数学姓名刘帅学号200710050113 主要内容、基本要求、主要参考资料等 主要内容 傅里叶变换是一种重要的变换,且在与通信相关的信号与系统中有着广泛的应用。本文主要研究傅里叶变换的基本原理;其次,掌握其在滤波,调制、解调,抽样等方面中的应用。分析了信号在通信系统中的处理方法,通过傅里叶变换推导出信号调制解调的原理,由此引出对频分复用通信系统的组成原理的介绍。 基本要求 通过傅里叶变换实现一个高通滤波,低通滤波,带通滤波。用傅里叶变换推导出信号调制解调的原理。通过抽样实现连续信号离散化,简化计算。另外利用调制的原理推导出通信系统中的时分复用和频分复用。 参考资料 [1]《信号与系统理论、方法和应用》徐守时著中国科技大学出版社 2006年3月修订二版 [2]《信号与系统》第二版上、下册郑君里、应启珩、杨为理著高等教育出版社 [3]《通信系统》第四版 Simon Haykin 著宋铁成、徐平平、徐智勇等译沈 连丰审校电子工业出版社 [4]《信号与系统—连续与离散》第四版 Rodger E.Ziemer 等著肖志涛等译 腾建辅审校电子工业出版社 [5]《现代通信原理》陶亚雄主编电子工业出版社 [6]《信号与系统》乐正友著清华大学出版社 [7]《信号与线性系统》阎鸿森、王新风、田惠生编西安交通大学出版社 [8]《信号与线性系统》张卫钢主编郑晶、徐琨、徐建民副主编西安电 子科技大学出版社 [9] https://www.360docs.net/doc/ab2677098.html,/view/191871.htm//百度百科傅里叶变换 [10]《通信原理》第六版樊昌信曹丽娜编著国防工业出版社 [11]A.V.Oppenheim,A.S.Willsky with S.H.Nawab.Siganals and systems(Second edition).Prentice-Hall,1997.中译:刘树棠。信号与系统。西安交通工业大学出版社 完成期限 指导教师 专业负责人
武汉理工大学信号与系统历年试题
武汉理工大学考试试题纸(A 卷) 课程名称 信号与系统 专业班级 信息工程学院05级 题号 一 二 三 四 五 六 七 八 九 十 总分 题分 6 10 34 50 100 备注: 学生不得在试题纸上答题(含填空题、选择题等客观题) 一、选择题(共2小题,每题3分,共6分) 1. 已知()f t 的付里叶变换为()F j ω,则信号)52(-t f 的付里叶变换为( ) A. 1225F j e j ()ωω- B. F j e j ()ωω25- C. F j e j ()ωω25 2- D. 122 5 2F j e j ()ωω- 2. 信号f t t t ()sin ()()=--ωε022的拉普拉斯变换为( ) A. s s e s 2022+-ω B. s s e s 2022+ω C. ωω02 22s e s + D. ωω02022s e s +- 二、填空题(共2小题,每空2分,共10分) 1. 对带宽为0~40KHz 的信号()f t 进行抽样,其奈奎斯特间隔T = s μ;信号()2 t f 的带 宽为 KHz ,奈奎斯特频率为 KHz 。 2. 设)()(ωj F t f 的付里叶变换为,则F (0)= _________;f (0)= _________。 三、简答题(6小题,共34分) 1. (4分)试画出函数 )(cos t πδ的波形。 2. (6分)求象函数)4(1)(222+-=-s s e s F S 的原函数)(t f ;并求其初值和终值。 ) ()]([)(t te t e T t r ==
3. 判断并说明理由: (1) (2分))()]([)(t te t e T t r == 是否为非时变系统? (2) (2分))()]([)(t ae t e T t r ==(a 为常数)是否为线性系统? (3) (2分)()[()]()sin r t T e t e t t ω==是否为稳定系统? (4) (2分))2()]([)(+==t e t e T t r 是否为因果系统? 4. (5分))(1t f 与()t f 2波形如下图所示,试利用卷积的性质,画出)()(21t f t f *的波形。 02 1 -1 ) (1t f () t f 2t t 12 1 3 5. (6分)求收敛域为13z <<,2 2()43 z F z z z =-+的原序列)(k f 。 6. (5分)说明系统函数为 2 2331 )(234523++++++++=s s s s s s s s s H 的系统的稳定性。 四、计算题(4小题,共50分) 1. (10分)一线性时不变具有非零的初始状态,已知当激励为)(t e 时全响应为 )cos(2)(1t e t r t π+=-,0>t ;若在初始状态不变,激励为)(2t e 时系统的全响应为)cos(3)(2t t r π=,0>t 。求在初始状态扩大一倍的条件下,如激励为)(30t t e -时,求系统的全响应)(3t r 。
信号与系统试题附答案
信科0801《信号与系统》复习参考练习题一、单项选择题:
14、已知连续时间信号,) 2(100)2(50sin )(--=t t t f 则信号t t f 410cos ·)(所占有的频带宽度为() A .400rad /s B 。200 rad /s C 。100 rad /s D 。50 rad /s
f如下图(a)所示,其反转右移的信号f1(t) 是() 15、已知信号)(t f如下图所示,其表达式是() 16、已知信号)(1t A、ε(t)+2ε(t-2)-ε(t-3) B、ε(t-1)+ε(t-2)-2ε(t-3) C、ε(t)+ε(t-2)-ε(t-3) D、ε(t-1)+ε(t-2)-ε(t-3) 17、如图所示:f(t)为原始信号,f1(t)为变换信号,则f1(t)的表达式是() A、f(-t+1) B、f(t+1) C、f(-2t+1) D、f(-t/2+1)
18、若系统的冲激响应为h(t),输入信号为f(t),系统的零状态响应是( ) 19。信号)2(4sin 3)2(4cos 2)(++-=t t t f π π 与冲激函数)2(-t δ之积为( ) A 、2 B 、2)2(-t δ C 、3)2(-t δ D 、5)2(-t δ ,则该系统是()>-系统的系统函数.已知2]Re[,6 51)(LTI 202s s s s s H +++= A 、因果不稳定系统 B 、非因果稳定系统 C 、因果稳定系统 D 、非因果不稳定系统 21、线性时不变系统的冲激响应曲线如图所示,该系统微分方程的特征根是( ) A 、常数 B 、 实数 C 、复数 D 、实数+复数 22、线性时不变系统零状态响应曲线如图所示,则系统的输入应当是( ) A 、阶跃信号 B 、正弦信号 C 、冲激信号 D 、斜升信号
信号与系统基础知识
第1章 信号与系统的基本概念 1.1 引言 系统是一个广泛使用的概念,指由多个元件组成的相互作用、相互依存的整体。我们学习过“电路分析原理”的课程,电路是典型的系统,由电阻、电容、电感和电源等元件组成。我们还熟悉汽车在路面运动的过程,汽车、路面、空气组成一个力学系统。更为复杂一些的系统如电力系统,它包括若干发电厂、变电站、输电网和电力用户等,大的电网可以跨越数千公里。 我们在观察、分析和描述一个系统时,总要借助于对系统中一些元件状态的观测和分析。例如,在分析一个电路时,会计算或测量电路中一些位置的电压和电流随时间的变化;在分析一个汽车的运动时,会计算或观测驱动力、阻力、位置、速度和加速度等状态变量随时间的变化。系统状态变量随时间变化的关系称为信号,包含了系统变化的信息。 很多实际系统的状态变量是非电的,我们经常使用各种各样的传感器,把非电的状态变量转换为电的变量,得到便于测量的电信号。 隐去不同信号所代表的具体物理意义,信号就可以抽象为函数,即变量随时间变化的关系。信号用函数表示,可以是数学表达式,或是波形,或是数据列表。在本课程中,信号和函数的表述经常不加区分。 信号和系统分析的最基本的任务是获得信号的特点和系统的特性。系统的分析和描述借助于建立系统输入信号和输出信号之间关系,因此信号分析和系统分析是密切相关的。 系统的特性千变万化,其中最重要的区别是线性和非线性、时不变和时变。这些区别导致分析方法的重要差别。本课程的内容限于线性时不变系统。 我们最熟悉的信号和系统分析方法是时域分析,即分析信号随时间变化的波形。例如,对于一个电压测量系统,要判断测量的准确度,可以直接分析比较被测的电压波形)(in t v (测量系统输入信号)和测量得到的波形)(out t v (测量系统输出信号),观察它们之间的相似程度。为了充分地和规范地描述测量系统的特性,经常给系统输入一个阶跃电压信号,得到系统的阶跃响应,图1-1是典型的波形,通过阶跃响应的电压上升时间(电压从10%上升至90%的时间)和过冲(百分比)等特征量,表述测量系统的特性,上升时间和过冲越小,系统特性越好。其中电压上升时间反映了系统的响应速度,小的上升时间对应快的响应速度。如果被测电压快速变化,而测量系统的响应特性相对较慢,则必然产生较大的测量误差。 信号与系统分析的另一种方法是频域分析。信号频域分析的基本原理是把信号分解为不
2021《信号与系统》考研奥本海姆2021考研真题库
2021《信号与系统》考研奥本海姆2021 考研真题库 一、考研真题解析 下列关于冲激函数性质的表达式不正确的是()。[西安电子科技大学2012研] A.f(t)δ′(t)=f(0)δ′(t) B.f(t)δ(t)=f(0)δ(t) C. D. 【答案】A查看答案 【解析】A项,正确结果应该为f(t)δ′(t)=f(0)δ′(t)-f′(0)δ(t)。 2x(t)=asint-bsin(3t)的周期是()。[西南交通大学研] A.π/2 B.π C.2π D.∞ 【答案】C查看答案 【解析】因为asint的周期为T1=2π/1=2π,bsin(3t)的周期为T2=2π/3,因为T1/T2=3/1为有理数,因此x(t)是周期信号,且x(t)=asint-bsin (3t)的周期是3T2=T1=2π。
3序列f(k)=e j2πk/3+e j4πk/3是()。[西安电子科技大学2012研] A.非周期序列 B.周期N=3 C.周期N=6 D.周期N=24 【答案】B查看答案 【解析】f1(k)=e j2πk/3的周期N1=2π/(2π/3)=3,f2(k)=e j4πk/3的周期N2=2π/(4π/3)=3/2,由于N1/N2=2为有理数,因此f(k)为周期序列,周期为2N2=N1=3。 4积分[西安电子科技大学2011研] A.2 B.1 C.0 D.4 【答案】A查看答案 【解析】 一电路系统H(s)=(10s+2)/(s3+3s2+4s+K),试确定系统稳定时系数K 的取值范围()。[山东大学2019研]
A.K>0 B.0<K<12 C.K>-2 D.-2<K<2 【答案】B查看答案 【解析】H(s)=(10s+2)/(s3+3s2+4s+K)=B(s)/A(s),其中A(s)=s3+3s2+4s+K,系统稳定需要满足K>0,3×4>K,因此0<K<12。7信号f(t)=6cos[π(t-1)/3]ε(t+1)的双边拉普拉斯变换F(s)=()。[西安电子科技大学2012研] A. B. C. D. 【答案】C查看答案 【解析】信号f(t)变形为
(完整版)信号与系统习题答案.docx
《信号与系统》复习题 1.已知 f(t) 如图所示,求f(-3t-2) 。 2.已知 f(t) ,为求 f(t0-at) ,应按下列哪种运算求得正确结果?(t0 和 a 都为正值)
3.已知 f(5-2t) 的波形如图,试画出f(t) 的波形。 解题思路:f(5-2t)乘a 1 / 2展宽 2倍f(5-2 × 2t)= f(5-t)
反转 右移 5 f(5+t) f(5+t-5)= f(t) 4.计算下列函数值。 ( 1) ( 2) ( t ) t 0 )dt t 0 u(t 2 (t t 0)u(t 2t 0 )dt ( 3) (e t t ) (t 2)dt 5.已知离散系统框图,写出差分方程。 解: 2 个延迟单元为二阶系统,设左边延迟单元输入为 x(k) ∑ 0 1 1) → 左○ :x(k)=f(k)-a *x(k-2)- a*x(k- x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) ∑ y(k)= b 2*x(k)- b 0*x(k-2) (2) 右○ : 为消去 x(k) ,将 y(k) 按( 1)式移位。 a 1*y(k-1)= b 2 * a 1*x(k-1)+ b * a 1*x(k-3) (3) a 0*y(k-2)= b 2 * a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2) 、( 3)、( 4)三式相加: y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b *[x(k)+ a 1 *x(k-1)+a *x(k-2)]- b *[x(k-2)+a 1*x(k-3)+a *x(k-4)] 2 0 0 0 ∴ y(k)+ a 1 *y(k-1)+ a *y(k-2)= b 2 *f(k)- b *f(k-2) ═ >差分方程
信号与线性系统分析吴大正_第四版习题答案
1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f (5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11) )]7()()[6sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k ---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f
(5) )2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11) )]7()()[6sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k ---=εε 1-3 写出图1-3所示各波形的表达式。 1-4 写出图1-4所示各序列的闭合形式表达式。 1-5 判别下列各序列是否为周期性的。如果是,确定其周期。 (2))6 3cos()443cos()(2ππππ+++=k k k f (5))sin(2cos 3)(5t t t f π+= 解: 1-6 已知信号)(t f 的波形如图1-5所示,画出下列各函数的波形。 (1))()1(t t f ε- (2))1()1(--t t f ε (5) )21(t f - (6))25.0(-t f (7)dt t df ) ( (8)dx x f t ?∞-)( 解:各信号波形为 (1))()1(t t f ε- (2) )1()1(--t t f ε (5))21(t f -
信号与系统试题及答案
模拟试题一及答案 一、(共20分,每小题5分)计算题 1.应用冲激函数的性质,求表示式25()t t dt δ∞ -∞?的值。 2.一个线性时不变系统,在激励)(1t e 作用下的响应为)(1t r ,激励)(2t e 作用下的响应为)(2t r ,试求在激励1122()()D e t D e t +下系统的响应。 (假定起始时刻系统无储能)。 3.有一LTI 系统,当激励)()(1t u t x =时,响应)(6)(1t u e t y t α-=,试求当激励())(23)(2t t tu t x δ+=时,响应)(2t y 的表示式。(假定起始时刻系统无储能)。 4.试绘出时间函数)]1()([--t u t u t 的波形图。 二、(15分,第一问10分,第二问5分)已知某系统的系统函数为25 ()32 s H s s s +=++,试 求(1)判断该系统的稳定性。(2)该系统为无失真传输系统吗? 三、(10分)已知周期信号f (t )的波形如下图所示,求f (t )的傅里叶变换F (ω)。 四、(15分)已知系统如下图所示,当0 1)0('=-f 。试求: (1)系统零状态响应;(2)写出系统函数,并作系统函数的极零图;(3)判断该系统是否为全通系统。 六. (15分,每问5分)已知系统的系统函数()2 105 2+++=s s s s H ,试求:(1)画出直 接形式的系统流图;(2)系统的状态方程;(3)系统的输出方程。 一、(共20分,每小题5分)计算题 1.解:25()500t t dt δ∞ -∞=?=? 2.解: 系统的输出为1122()()D r t D r t + 3.解: ()()t t u t u t dt -∞?=?, ()()d t u t dx δ= ,该系统为LTI 系统。 故在()t u t ?激励下的响应126()6()(1)t t t y t e u t dt e ααα ---∞ =?=--? 在()t δ激励下的响应2 2 ()(6())6()6()t t d y t e u t e u t t dx αααδ--==-+ 在3()2()tu t t δ+激励下的响应1818 ()12()12()t t y t e e u t t αααδαα --=--+。 4 二、(10分)解:(1) 21255 ()32(2)(1)1,s s H s s s s s s s ++= = ++++∴=-=-2,位于复平面的左半平面 所以,系统稳定. (2) 由于6 ()(3)4) j H j j j ωωωω+= ≠+常数+(,不符合无失真传输的条件,所以该系统不能对 输入信号进行无失真传输。 三、(10分) 第1章 信号与系统的基本概念 1.1 引言 系统是一个广泛使用的概念,指由多个元件组成的相互作用、相互依存的整体。我们学习过“电路分析原理”的课程,电路是典型的系统,由电阻、电容、电感和电源等元件组成。我们还熟悉汽车在路面运动的过程,汽车、路面、空气组成一个力学系统。更为复杂一些的系统如电力系统,它包括若干发电厂、变电站、输电网和电力用户等,大的电网可以跨越数千公里。 我们在观察、分析和描述一个系统时,总要借助于对系统中一些元件状态的观测和分析。例如,在分析一个电路时,会计算或测量电路中一些位置的电压和电流随时间的变化;在分析一个汽车的运动时,会计算或观测驱动力、阻力、位置、速度和加速度等状态变量随时间的变化。系统状态变量随时间变化的关系称为信号,包含了系统变化的信息。 很多实际系统的状态变量是非电的,我们经常使用各种各样的传感器,把非电的状态变量转换为电的变量,得到便于测量的电信号。 隐去不同信号所代表的具体物理意义,信号就可以抽象为函数,即变量随时间变化的关系。信号用函数表示,可以是数学表达式,或是波形,或是数据列表。在本课程中,信号和函数的表述经常不加区分。 信号和系统分析的最基本的任务是获得信号的特点和系统的特性。系统的分析和描述借助于建立系统输入信号和输出信号之间关系,因此信号分析和系统分析是密切相关的。 系统的特性千变万化,其中最重要的区别是线性和非线性、时不变和时变。这些区别导致分析方法的重要差别。本课程的内容限于线性时不变系统。 我们最熟悉的信号和系统分析方法是时域分析,即分析信号随时间变化的波形。例如,对于一个电压测量系统,要判断测量的准确度,可以直接分析比较被测的电压波形)(in t v (测量系统输入信号)和测量得到的波形)(out t v (测量系统输出信号),观察它们之间的相似程度。为了充分地和规范地描述测量系统的特性,经常给系统输入一个阶跃电压信号,得到系统的阶跃响应,图1-1是典型的波形,通过阶跃响应的电压上升时间(电压从10%上升至90%的时间)和过冲(百分比)等特征量,表述测量系统的特性,上升时间和过冲越小,系统特性越好。其中电压上升时间反映了系统的响应速度,小的上升时间对应快的响应速度。如果被测电压快速变化,而测量系统的响应特性相对较慢,则必然产生较大的测量误差。 信号与系统分析的另一种方法是频域分析。信号频域分析的基本原理是把信号分解为不同频率三角信号的叠加,观察信号所包含的各频率分量的幅值和相位,得到信号的频谱特性。图1-2是从时域和频域观察一个周期矩形波信号的示意图,由此可以看到信号频域和时域的关系。系统的频域分析是观察系统对不同频率激励信号的响应,得到系统的频率响应特性。频域分析的重要优点包括:(1)对信号变化的快慢和系统的响应速度给出定量的描述。例如,当我们要用一个示波器观察一个信号时,需要了解信号的频谱特性和示波器的模拟带宽,当示波器的模拟带宽能够覆盖被测信号的频率范围时,可以保证测量的准确。(2) 三轴加速度传感器的步态识别系统 近年来随着微机电系统的发展,加速度传感器已经广泛应用于各个领域并拥有良好的发展前景。例如在智能家居、手势识别、步态识别、跌倒检测等领域,都可以通过加速度传感器实时获得行为数据从而判断出用户的行为情况。 目前许多智能手机都内置多种传感器,通过预装软件就能够获得较精确的原始数据。本文提出一种基于三轴加速度传感器,用智能手机采集用户数据,对数据进行处理及特征提取获得特征矩阵并分类识别的方法,有效地识别了站立、走、跑、跳四种动作。 人体动作识别处理过程主要包含数据采集、预处理、特征提取和分类器识别数据采集数据采集和发送模块安装在用户端,另一个数据接收模块接在电脑终端上。 由于我们制作的采集模块很轻、很小,所以方便佩戴。当用户运动时,三轴加速度传感器会将据采集并通过无线方式发送给电脑接收模块,再通过电脑上的软件部分对采集到的数据进行分析处理,将结果输出,显示用户的实时状态。 本文使用的加速度传感器数据来自于共计60个样本。传感器统一佩戴于腰间。本文选取了其中一位采集者的数据用于主要分析研究, 其余两位采集者的数据则用于验证由第一位采集者数据研究所得的结论,这样的做法既减小了数据处理的繁杂又能保证最终结果的准确性。预处理应用程序设置的采集时间间隔为0.1s,对每一个动作的采集时间为25s。考虑到用户在采集数据一开始与将要结束时的动作不平稳可能对数据带来较大影响,前2s2s采集的数据将被舍弃不予分析。因原始加速度信号一般都含有噪声,为了提高数据分析结果的准确性,通常在原始加速度信号进行特征提取前对其进行去躁、归一化、加窗等预处理。通过加窗处理,不仅规整了加速度信号的长度,而且方便研究人员按照需要选择适宜的信号长度,这样有利于后续的特征提取。 许多研究人员使所示。研究人员采集的加速度传感器信号由于采集者的动作力度不同造成加速度信号的幅度差异较大,这会对之后的分类识别造成负面影响,归一化技术可以调整加速度信号的幅度,按照一定的归一化算法可以使加速度信号的幅度限定在某一数值范围内,文献[2]在识别跑、站立、跳和走路这四种动作时对四种动作的加速度信号进行了归一化;文献[3]在进行手势识别时对手势动作的加速度信号进行了归一化处理。特征提取特征提取和选择模块的作用在于从加速度信号中提取出那些表征人体行为的特征向量,处于预处理模块和分类器模块之间,是人体行为识别过程中的一个重要环节,直接影响分类识别的效果。特征的提取方法具有多样性,对于不同的识别目的,研究人员会提取不同的特征,例如为了识别分类站立和跑步,研究人员通常会选取方差和标准差这类能够反映加速度信号变化大小的特征,而为了识别分类走路和跑步,研究人员通常会选取能量 小波变换在信号降噪和压缩中的应用 1.1MATLAB信号降噪 小波分析的重要应用之一是用于信号消噪,其基本原理如下: 含噪的一维信号模型表示如下: s(k)=f(k)+sigma*e(k) sigma为常数,k=0,1,2,......,n-1 式中s(k)为含噪信号,f(k)为有用信号,e(k)为噪声信号。这里假设e(k)是一个高斯白噪声,通常表现为高频信号,而工程实际中f(k)通常为低频信号或者是一些比较平稳的信号。因此,我们按如下方法进行消噪处理:首先对信号进行小波分解,由于噪声信号多包含在具有较高频率的细节中,从而可以利用门限、阈值等形式对分解所得的小波系数进行处理,然后对信号进行小波重构即可达到对信号进行消噪的目的。对信号进行消噪实际上是抑制信号中的无用部分,增强信号中的有用部分的过程。一般地,一维信号的消噪过程可以如下3个步骤: 步骤1:一维信号的小波分解。选择一个合适的小波并确定分解的层次,然后进行分解计算。 步骤2:小波分解高频系数的阈值量化。对各个分解尺度下的高频系数选择一个阈值进行软阈值量化处理。步骤3:一维小波重构。根据小波分解的最底层低频系数和各层分解的高频系数进行一维小波重构。 在这三个步骤中,最关键的是如何选择阈值以及进行阈值量化处理。在某种程度上,它关系到信号消噪的质量。 1.噪声在小波分解下的特性 总体上,对于一维离散信号来说,其高频部分影响的是小波分解的第一层的细节,其低频部分影响的是小波分解的最深层和低频层。如果对一个仅有白噪声所组成的信号进行分析,则可以得出这样的结论:高频系数的幅值随着分解层次的增加而迅速地衰减,且方差也有同样的变化趋势。 用C(j,k)表示噪声经过小波分解的系数,其中j表示尺度,k表示时间。下面将噪声看成普通信号,分析它的相关性、频谱和频率这3个主要特征。 (1)如果所分析的信号s是一个平稳的零均值的白噪声,那么它的小波分解系数是相互独立的。 (2)如果信号s是一个高斯型噪声,那么其小波分解系数是互不相关的,且服从高斯分布。 (3)如果信号s是一个平稳、有色、零均值的高斯型噪声序列,那么它的小波分解系数也是高斯序列,并且对每一个分解尺度j,其相应的系数也是一个平稳、有色的序列。如何选择对分解系数具有相关性的小波是一个很困难的问题,在目前也没有得到很好的解决。进一步需要指出的是,即使存在这样一个小波但是它对噪声的解相关性还取决于噪声的有色性。 (4)如果信号s是一个固定的、零均值的ARMA模型,那么对每一个小波分解尺度j,C(j,k)也是固定的、零均值的ARMA模型,且其特性取决于尺度j。 (5)如果信号s是一般的噪声 1)若它的相关函数已知,则可以计算系数序列C(j,k)和C(j,k'); 2)若它的相关函数谱已知,则可计算C(j,k)(k是整数)的谱尺度j和j'的交叉谱。 2.应用一维小波分析进行信号的消噪处理 小波工具箱中用于信号消噪的一维小波函数是wden.m和wdencmp.m。 小波分析进行消噪处理一般有下述3种方法。 (1)默认阈值消噪处理。该方法利用函数ddencmp生成信号的默认阈值,然后利用函数wdencmp进行消噪处理。 (2)给定阈值消噪处理。在实际的消噪处理过程中,阈值往往可以通过经验公式获得,且这种阈值要比默认阈值的可信度要高。在进行阈值量化处理时可利用函数wthresh。 (3)强制消噪处理。该方法是将小波分解结构中的高频系数全部置为0,即滤掉所有高频部分,然后对信 信号与系统的课程感想 转眼间一学期已经过去了,我们也学习了一学期的《信号与系统》,虽然老师和同学们一致认为,学校给安排的学时实在是太少了,记得刚开学的时候董老师说的是课本建议学时是64学时。在有限的时间内,对信号与系统里的三大变换进行了系统的学习,收获和感触还是很多的。 之前就听学长学姐说这门课程比较难,是通信工程的重要课程之一,老师也告诉我们是“double e”专业的必修课,还是很有分量和难度的一门课,同时,在运输学院里也只有我们智能运输专业学这门课,感觉非常高大上也非常兴奋。信号与系统的头几节课是董老师给我们上的,记得开学前董老师叮嘱我们参加大创的几个人要好好学《信号与系统》,后来上课的时候樊老师也反复叮嘱我们下课一定要好好推导一遍上课讲过的东西,因为自己比较懒或者说没有养成下课及时巩固的好习惯,总是在做作业的时候才花上大半天研究作业涉及的内容,这样的习惯让我始终还是有点被动,到底还是有点辜负了老师的良苦用心。 《信号与系统》是一门通信和电子信息类专业的核心基础课,其中的概念和分析方法广泛应用于通信、自动控制、信号与信息处理、电路与系统等领域。这门课无论是从教学内容,还是从教学目的看,都是一门理论性与应用性并重的课程。它以高等数学、复变函数、电路分析等课程为基础,同时又是数字信号处理、通信原理等课程的基础,在课程体系中有着承上启下的作用。该课程的基本分析方法和原理广泛应用于通信、数字信号处理、数字语音处理、数字图像处理等领域。它讨论确定性信号经线性时不变系统传输与处理的基本概念和基本方法,从时域到变换域,从连续到离散,从输入输出描述到空间状态描述,以通信和控制工程作为主要应用背景,注重实例分析。这门课程是以《高等数学》为基础,但 1.《信号与系统》这门课程主要讲述什么内容? 《信号与系统》是一门重要的专业基础课程。它的任务是研究信号和线性非时变系统的基本理论和基本分析方法,要求掌握最基本的信号变换理论,并掌握线性非时变系统的分析方法,为学习后续课程,以及从事相关领域的工程技术和科学研究工作奠定坚实的理论基础。 2. 这门在我们的知识架构中占有什么地位? 是一门承上启下的重要的专业基础课程。其基本概念和方法对所有的 工科专业都很重要。信号与系统的分析方法的应用范围一直不断的在扩大。信号与系统不仅仅是工科教育中一门最基本的课程,而且能够成为工科类学生最有益处而又引人入胜又最有用处的一门课程。 《信号与系统》是将我们从电路分析的知识领域引入信号处理与传输领域的关键性课程。 3.学习这门课程有什么用处? 学习这门课程有什么用处呢?百度告诉我:通过本课程的学习,学生将理解信号的 函数表示与系统分析方法,掌握连续时间系和离散时间系统的时域分析和频域分析, 连续时间系统的S域分析和散时间系统的Z分析,以及状态方程与状态变量分析法等 相关内容。通过上机实验,使学生掌握利用计算机进行信号与系统分析的基本方法加 深对信号与线性非时变系统的基本理论的理解,训练学生的实验技能和科学实验方法,提高分析和解决实际问题的能力。 在百度上和道客巴巴还有知乎上都是很多这样看起来很高大上的解释,但是作为学 生的我还是不能很清楚的了解到学习这门课程有什么用处,后面我发现了这样一个个 例子,觉得对信号与系统的用处有了一定的了解。 如图这样一个轮子是怎么设计的呢? (打印有可能打印不出来,就是很神奇的一个轮子,交通工具) 没学过信号与系统的小明想到了反馈与系统,在轮子上放一个传感器,轮子正不正 系统就知道了,所以设计这个轮子其实就是设计一个系统。 好,现在我们有了一个传感器,要是机器朝左边偏一度,他就会输出一个信号。这个信号接下来就会传给处理器进行处理。处理器再控制电机,让他驱动轮子产生向左 的加速度,加速度就相当于给予系统向右的力,来修正向左的偏移。 小明就按照这一思想设计了一个小车车。踏上踏板,一上电,尼玛,他和他的车车就变成了一个节拍器。左边摔一下,右边摔一下。幸亏小明戴了头盔。小明觉得被骗了。找了一本反馈理论来看,原来有些反馈系统是不稳定的。 想要这个系统稳定地立着,我该怎么办?小明眼神呆滞,望着天空。 天边传来一个声音:你要分析环路稳定性呀。 怎么分析呢? 你要从信号传输入手,分析信号的传输函数。 2000年 一、选择题(每小题3分,共30分) 1、已知y (t )=x (t )*h (t ),g (t )=x (3t )*h (3t ),x (t )?X (j ω),h (t )?H (j ω),则g (t ) = ( )。 (a )?? ? ??33t y (b ) ?? ? ??331t y (c ) ()t y 33 1 (d ) ()t y 39 1 2、差分方程)()2()5()3(6)(k f k f k y k y k y --=+++-所描述的系统是( )的线性时不变 系统。 (a )五阶 (b )六阶 (c )三阶 (d )八阶 3、已知信号f 1(t ),f 2(t )的频带宽度分别为?ω1和?ω2,且?ω2>?ω1,则信号y (t )= f 1(t )*f 2(t )的不失真采样 间隔(奈奎斯特间隔)T 等于( )。 (a ) 2 1π ωω?+? (b ) 1 2π ωω?-? (c ) 2 πω? (d ) 1 πω? 4、已知f (t )?F (j ω),则信号y (t )= f (t )δ (t -2)的频谱函数Y (j ω)=( )。 (a )ωω2j e )j (F (b )ω2-j e )2(f (c ))2(f (d )ω2j e )2(f 5、已知一线性时不变系统的系统函数为) 2)(1(1 -)(-+=s s s s H ,若系统是因果的,则系统函数H (s )的 收敛域ROC 应为( )。 (a )2]Re[>s (b )1]Re[-信号与系统基础知识
三轴加速度传感器的步态识别系统
信号与系统的相关应用
信号与系统的课程感想
(完整版)信号与系统的理解与认识
西南交大考研试题(信号与系统)
0,则此系统的幅频特性|H (j ω)|= ( )。 (a ) 2 1 (b )1 (c )??? ??-a ω1 tan (d )?? ? ??-a ω1tan 2 7、已知输入信号x (n )是N 点有限长序列,线性时不变系统的单位函数响应h (n )是M 点有限长序列, 且M >N ,则系统输出信号为y (n )= x (n )*h (n )是( )点有限长序列。 (a )N +M (b )N +M -1 (c )M (d )N 8、有一信号y (n )的Z 变换的表达式为113 112 4111)(---+-= z z z Y ,如果其Z 变换的收敛域为3 1 ||41<