实验五 基于SIMULINK的系统仿真

南昌大学实验报告
学生姓名: 刘聪 学 号: 5503212008 专业班级: 应化 121 实验类型:■ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:
一、实验项目名称
实验五 基于SIMULINK 的系统仿真
二、实验目的
1、熟悉SIMULINK 工作环境及特点
2、掌握线性系统仿真常用基本模块的用法
3、掌握SIMULINK 的建模与仿真方法
4、子系统的创建和封装设计
三、主要仪器设备及耗材
计算机
四、实验程序及结果
SIMULINK 仿真实际应用.
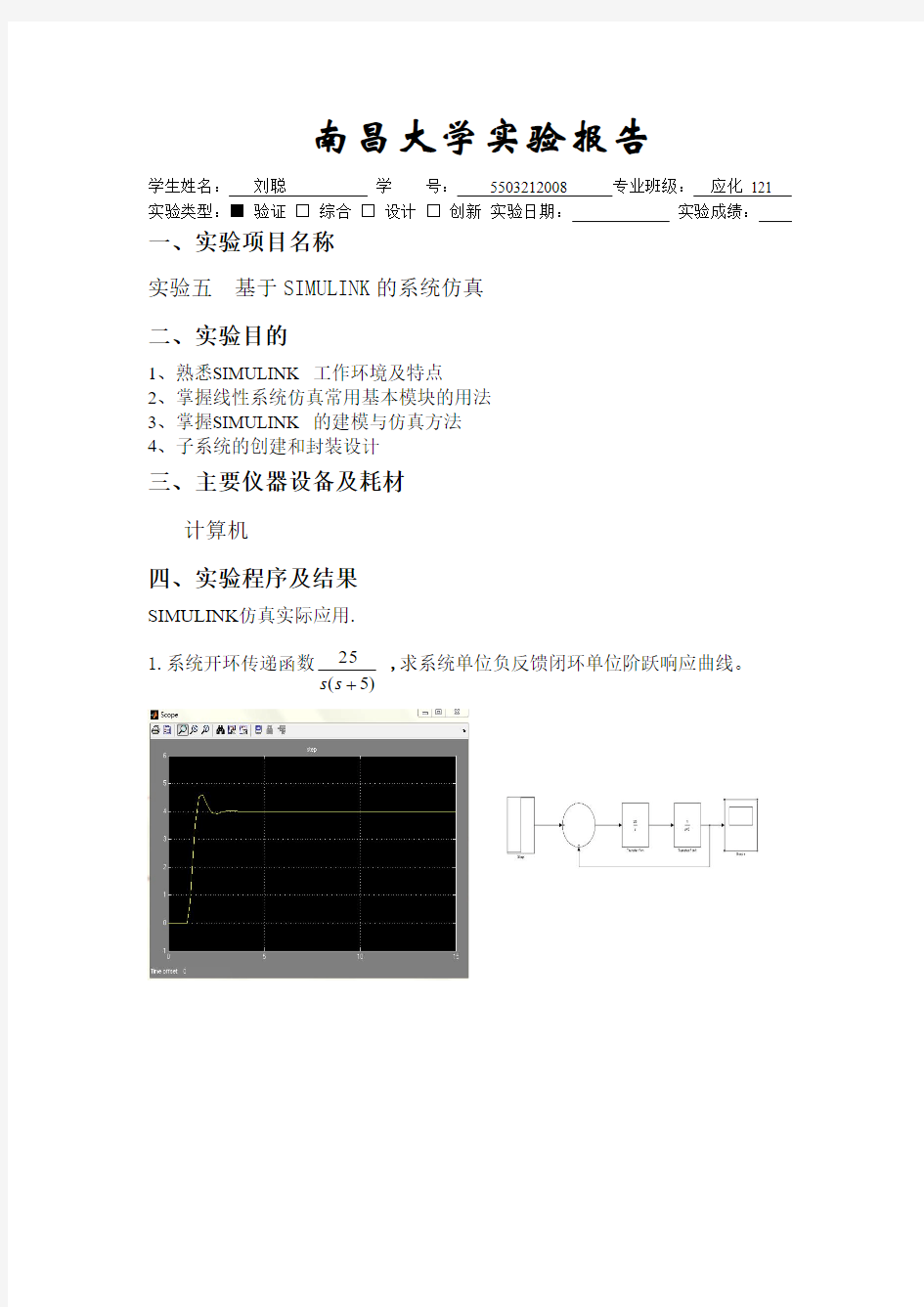
1.系统开环传递函数 ,求系统单位负反馈闭环单位阶跃响应曲线。
)5(25 s s
2.(1)在Simulink集成环境下建立模型,在给定信号作用点处输入单位给定阶跃响应信号,0.3秒后在扰动信号点输入单位阶跃响应信号。并绘制相应的响应曲线。
(1)计算仿真结果的超调量、上升时间、峰值时间、稳态误差。
超调量:mp=(1.2072-0.99)/0.99
上升时间:t
= 1.1222
s
峰值时间:t
=1.2797
p
稳态误差:e
=1-0.99=0.01
ss
计算机仿真实验-基于Simulink的简单电力系统仿真
实验七 基于Simulink 的简单电力系统仿真实验 一. 实验目的 1) 熟悉Simulink 的工作环境及SimPowerSystems 功能模块库; 2) 掌握Simulink 的的powergui 模块的应用; 3) 掌握发电机的工作原理及稳态电力系统的计算方法; 4)掌握开关电源的工作原理及其工作特点; 5)掌握PID 控制对系统输出特性的影响。 二.实验内容与要求 单机无穷大电力系统如图7-1所示。平衡节点电压0 44030 V V =∠? 。负荷功率10L P kW =。线路参数:电阻1l R =Ω;电感0.01l L H =。发电机额定参数:额定功率100n P kW =;额定电压440 3 n V V =;额定励磁电流 70 fn i A =;额定频率50n f Hz =。发电机定子侧参数:0.26s R =Ω, 1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。发电机阻尼绕组参数:0.0224kd R =Ω, 1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。发电机转动惯量和极对数分别 为224.9 J kgm =和2p =。发电机输出功率050 e P kW =时,系统运行达到稳态状态。在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
G 发电机节点 V 负 荷 l R l L L P 图 7.1 单机无穷大系统结构图 输电线路 三.实验步骤 1. 建立系统仿真模型 同步电机模块有2个输入端子、1个输出端子和3个电气连接端子。模块的第1个输入端子(Pm)为电机的机械功率。当机械功率为正时,表示同步电机运行方式为发电机模式;当机械功率为负时,表示同步电机运行方式为电动机模式。在发电机模式下,输入可以是一个正的常数,也可以是一个函数或者是原动机模块的输出;在电动机模式下,输入通常是一个负的常数或者是函数。模块的第2个输入端子(Vf)是励磁电压,在发电机模式下可以由励磁模块提供,在电动机模式下为一个常数。 在Simulink仿真环境中打开Simulink库,找出相应的单元部件模型,构造仿真模型,三相电压源幅值为4403,频率为50Hz。按图连接好线路,设置参数,建立其仿真模型,仿真时间为5s,仿真方法为ode23tb,并对各个单元部件模型的参数进行修改,如图所示。
Matlab通信系统仿真实验报告
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
实验七 SIMULINK仿真集成环境
实验七 SIMULINK 仿真集成环境 一、实验目的 熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。 二、实验内容 (1) SIMULINK 模型的创建和运行。 (2)一阶系统仿真 三、实验步骤 1. Simulink 模型的创建和运行 (1) 创建模型。 ① 在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。 ②在MA TLAB 菜单或库浏览器餐单中选择File|New|Model ,或者单击库浏览器的图标,即可新建一个“untitle ”的空白模型窗口。 ③打开“Sources ”模块库,选择“Sine Wave ”模块,将其拖到模型窗口,再重复一次;打开“Math Operatioins ”模块库选取“Product ”模块;打开“Sinks ”模块库选取“Scope ”模块。 (2) 设置模块参数 ① 修改模块注释。单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。 ② 双击下边“Sine Wave ”模块,弹出参数对话框,浆“Frequency ”设置为100;双击“Scope ”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes ”为3. ③如图所示,用信号线连接模块。 (3) 启动仿真 ① 单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope ”模块弹出示波器窗口,可以看到波形图。 ② 修改仿真步长。在模块窗口的Simulation 菜单下选择“Configuration Parameters ”命令,把“Max step size ”设置为0.01;启动仿真,观察波形是不是比原来光滑。 ③再次修改“Max step size ”为0.001;设置仿真终止时间为10s ;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。 浆示波器的参数对话框打开,选择“Data history ”页,把“Limit data point tolast ”设置为10000;再次启动仿真,观察示波器将看到完整的波形。 2.. 一阶系统仿真 使用阶跃信号作为输入信号,经过传递函数为1 6.01 s 的一阶系统,观察其输出。 ①设置“Step ”模块的“Step time ”为0;浆仿真参数的最大步长“Max step size ”设置为0.01. 把结果数据输出到工作空间。 ②打开“Sources ”模块库,选取“Clock ”模块添加到模型窗口中。 ③代开“Sinks ”模块库,选取两个“To workspace ”模块添加到模型窗口中,两个模块分别连接输出和“Clock ”模块。
MATLAB Simulink系统建模与仿真 实验报告
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
实验三__SIMULINK仿真实验
实验三 SIMULINK 仿真实验 一、实验目的 1.熟悉Simulink 的操作环境并掌握绘制系统模型的方法。 2.掌握Simulink 中子系统模块的建立与封装技术。 3.对简单系统所给出的数学模型能转化为系统仿真模型并进行仿真分析。 二、实验设备及条件 计算机一台(带有MATLAB7.0软件环境)。 三、实验内容 1.建立下图5-1所示的Simulink 仿真模型并进行仿真,改变Gain 模块的增益,观察Scope 显示波形的变化。 图3-1 正弦波产生及观测模型 2.利用Simulink 仿真下列曲线,取πω2=。 t t t t t t x ωωωωωω9sin 9 17sin 715sin 513sin 31sin )(++++=。 仿真参考模型如下图3-2,Sine Wave5模块参数设置如下图3-3,请仿真其结果。
图3-2 ()x t 的仿真参考模型图 图3-3 Sine Wave5模块参数设置图 3. 已知某控制系统的传递函数如题3-4图所示。试利用SIMULINK 建模仿真,并用示波器显示该系统的阶跃响应曲线。(注:系统中e -0.4 s 环节表示的是控制中的延时环节,可用SIMULINK 的连续系统模块库中的“Transport Delay”模块表示) 图3-4 4、已知某控制系统的传递函数如题3-5图所示。 试利用SIMULINK 建模,并实现以下功能: (1) 将已建模型转化为一个名为“mysys”的子系统; (2) 将已建子系统进行适当的封装; (3) 封装完毕后双击子系统图标,在弹出的属性设置窗口中对变量进行赋值(Tm = 0.5,Tp = 1),并在模型中加入源模块和显示模块,观察系统的阶跃响应曲线。
simulink仿真实验报告
电机与拖动控制实验及其MATLAB仿真: 《电机与拖动控制实验及其MATLAB仿真》是2014年11月18日清华大学出版社出版的图书,作者是曹永娟。 内容简介: 本书分上、下两篇。上篇为电机与拖动控制实验教程,针对MCL 系列电机实验教学系统进行介绍,包括变压器、同步电机、异步电机、直流电机以及直流调速系统、交流调速系统拖动控制实验内容。 目录: 上篇电机与拖动控制实验 第1章电机实验装置和基本要求 1.1MCLⅡ型电机教学实验台 1.2实验装置和挂件箱的使用 1.2.1MCLⅡ型电机实验装置交流及直流电源操作说明 1.2.2仪表的使用 1.2.3挂件箱的使用 1.2.4交直流电机的使用 1.2.5导轨、测速发电机及转速计的使用 第2章电机与拖动控制实验基本要求和安全操作规程 2.1实验基本要求 2.2实验前的准备 2.3实验的进行 2.4实验报告
2.5实验安全操作规程 第3章变压器实验 3.1单相变压器 3.1.1实验目的 3.1.2预习要点 3.1.3实验项目 3.1.4实验设备及仪器 3.1.5实验方法 3.1.6实验报告 3.2三相变压器 3.2.1实验目的 3.2.2预习要点 3.2.3实验项目 3.2.4实验设备及仪器 3.2.5实验方法 3.2.6实验报告 3.3三相变压器的连接组和不对称短路3.3.1实验目的 3.3.2预习要点 3.3.3实验项目 3.3.4实验设备及仪器 3.3.5实验方法
3.3.6实验报告 3.3.7附录 3.4三相变压器的并联运行3. 4.1实验目的 3.4.2预习要点 3.4.3实验项目 3.4.4实验设备及仪器 3.4.5实验方法 3.4.6实验报告 第4章同步电机实验 4.1三相同步发电机的运行特性4.1.1实验目的 4.1.2预习要点 4.1.3实验项目 4.1.4实验设备及仪器 4.1.5实验方法 4.1.6实验报告 4.1.7思考题 4.2三相同步发电机的并联运行4.2.1实验目的 4.2.2预习要点 4.2.3实验项目
华中科技大学matlabsimulink实验
实验报告 实验项目名称Simulink熟悉及其应用所属课程名称系统仿真与matlab 实验日期 班级自动化1203 学号U201214514 姓名董鸣远 成绩
实验概述: 【实验目的及要求】 本部分的目的在于学习matlab中有关simulink的正确使用及其应用,包括:simulink的基本使用、模型的建立、模型的复制剪切粘贴、命名等、线的基本使用、子系统的建立、属性的设置、参数的设置与应用、simulink仿真运行参数的设置等。 通过该实验,要求能够做到不查参考书,能熟练编写基本的simulink应用。 【实验环境】(使用的软件) 微机 Windows XP Matlab 7.0 实验内容: [1]建立如图1所示系统结构的Simulink模型,并用示波器(Scope)观测其单 位阶跃和斜坡响应曲线。 101 s 101 s 1.414 R(t)C(t) - - 图 1 解:模型为: 输入为单位阶跃: 单位阶跃响应曲线为:
输入为斜坡模型: 斜坡响应曲线:
[2] 建立如图2所示PID 控制系统的Simulink 模型,对系统进行单位阶跃响 应仿真,用plot 函数绘制出响应曲线。其中=10,=3,=2。要 求PID 部分用subsystem 实现,参数、、通过subsystem 参数输入 来实现。 p k i k d k 1s /du dt 324327242410355024 s s s s s s s +++++++R(s) C(s) 图 2 解: Simulink 模型为:
PID控制器子系统内部模型: 参数选择: 响应曲线:
Matlab SIMULINK仿真实验报告
西安邮电学院《Matlab》实验报告(四)2011- 2012 学年第 1 学期自动化专业:自动0903 班级:学号:姓名:
2011 年11 月10 日 第四次SIMULINK仿真实验一、实验目的1.熟悉Simulink的操作环境并掌握绘制系统模型的方法。 2.掌握Simulink 中子系统模块的建立与封装技术。 3.对简单系统所给出的数学模型能转化为系统仿真模型并进行仿真分析。二、实验设备及条件计算机一台(带有MATLAB6.5以上的软件环境)。三、实验内容1.建立下图5-1所示的Simulink仿真模型并进行仿真,改变Gain模块的增益,观察Scope显示波形的变化。图5-1 正弦波产生及观测模型92.利用simulink仿真来实现摄氏温度到华氏温度的转化:(fc c5),参考模型为图5-2。范围在-10℃~100℃图5-2 摄氏温度到华氏温度的转化的参考模型3.利用Simulink仿真下列曲线,取。21111。 3579仿真参 考模型如下图5-3,Sine Wave5模块参数设置如下图5-4,请仿真其结果。图5-3 的仿真参考模型图图5-4 Sine Wave5模块参数设置图x(t) 4.如图5-5所示是分频器仿真框图,其组成仅有三台设备:脉冲发生器,分频器和示波器。分频器送
出一个到达脉冲,第一路cnt(计数),它的数值表示 在本分频周期记录到多少个脉冲;第二路是hit(到达),就是分频后的脉冲输出,仿真出结果来。 图5-5 分频器仿真框图 5. Simulink 综合演示实验 ---悬吊式起重机动力学仿 真悬吊式起重机结构简图 1. 悬吊式起重机动力 学方程 2小车水平方向受力方程 pt2dt2d吊绳垂直方pp2向受力方程dt2d小车 的力矩p2dt平衡方程式中,mt、mp、I、c、l、F、x、分别为起重机的小车质量、吊重、 吊重惯量、等价粘性摩擦系数、钢丝绳长(不计绳重),小车驱动力、小车位移以及钢丝绳的摆角。由(2)、(3)式去掉P,则有 2. 悬吊式起重机动力学Simulink仿真为便于建模,将起重机动力学方程改写为: p由以上二式可建立如图所示的起重机 Simulink模型:1图中:lmp=mpl 在运行仿真模型前,须先计算出k1、k2和lmp。设mt =50kg,mp=270kg,l=4m,,在MATLAB指令窗输入以下指令 l=4; c=20; mp=270; mt=50; I=mp*l^2; %计算吊重转动惯量 lmp=l*mp;
实验3_simulink
实验3 SIMULINK仿真 一、实验目的 1、熟悉Simulink的工作环境,掌握模型的创建 2、熟练掌握模块参数的设置和常用模块的使用 3、掌握模型结构的参数化 4、掌握创建子系统并封装 二、实验步骤 1、打开Simulink的工作环境 在MATLAB的命令窗口输入“simulink”或单击工具栏中的快捷图标,可以打开Simulink模块库浏览器窗口,如图3-1所示。 单击工具栏上的图标或选择菜单“File”-“New”-“Model”,新建一个名为“untitled”的空白模型窗口。 图3-1 Simulink模块库浏览器 2、创建模型 按图3-2建立模型,参数按表3-1设置。建立好模型后,点击运行仿真,在MATLAB中打开li7-4.mat即可查看运行结果。
图3-2 系统结构图 3、仿真器设置 启动仿真后,在MA TLAB命令窗口中显示以下警告: Warning: Using a default value of 0.2 for maximum step size. The simulation step size will be equal to or less than this value. You can disable this diagnostic by setting 'Automatic solver parameter selection' diagnostic to 'none' in the Diagnostics page of the configuration parameters dialog. 在模型窗口选择菜单“simulation”-“configuration parameters…”或直接按快捷键“ctrl+E”,则会打开参数设置对话框。根据警告修改“Max step size”参数为0.2,再次运行仿真。 5、仿真系数参数化 为了使模型使用更灵活,可以将模型中器件系数参数化。如在传递函数中把系数用[t1 t2]代替,增益器中增益系数用k代替。那么在运行仿真之前,首先要对三个参数赋值。 在命令窗口中输入t1=1 ; t2=2 ; k=-1 ; 运行之后再运行仿真。或者建立m脚本文件给三个参数赋值,再运行仿真。 6、封装子系统 将积分器、传递函数和增益器设置为子系统,在对话框中设置t1,t2,k的值。 先将积分器、传递函数和增益器一起选中,在“Edit”下选择“Create subsystem”创建子系统;选中该子系统后选择“Edit”下的“Mask subsystem...”,打开封装对话框。在Icon选项卡的Drawing commands栏中设置“disp(…传输系统?)”,在Parameters选项卡的Dialog Parameters框中添加变量t1,t2,k。封装完毕后单击“OK”按钮保存设置。 双击刚才封装好的子系统,出现参数设置对话框,可以设置t1=1,t2=2,k=-1,然后运行仿真查看结果。
实验报告simulink
班级:姓名:学号:
实验一:AM 信号的调制与解调 实验目的:1.了解模拟通信系统的仿真原理。 2.AM 信号是如何进行调制与解调的。 实验原理: 1.调制原理:AM 调制是用调制信号去控制高频正弦载波的幅度,使其按调制信号的规律变化的过程,就是按原始电信号的变化规律去改变载波某些参量的过程。 + m(t) S AM (t)A 0 cos ωc t AM 信号的时域和频域的表达式分别为: ()()[]()()()()t t m t A t t m A t S C C C AM ωωωcos cos cos 00+=+= 式(4-1) ()()()[]()()[]C C C C AM M M A S ωωωωωωδωωδπω-+++ -++=2 1 0 式(4-2) 在式中,为外加的直流分量;可以是确知信号也可以是 随机信号,但通常认为其平均值为0,即。其频谱是DSB SC-AM 信号的频谱加上离散大载波的频谱。 2.解调原理:AM 信号的解调是把接收到的已调信号还 原为调制信号。 AM 信号的解调方法有两种:相干解调和包 络检波解调。 AM 相干解调原理框图如图。相干解调(同步解调):利用
相干载波(频率和相位都与原载波相同的恢复载波)进行的解调,相干解调的关键在于必须产生一个与调制器同频同相位的载波。如果同频同相位的条件得不到满足,则会破坏原始信号的恢复。相干载波的提取:(1)导频法:在发送端加上一离散的载频分量,即导频,在接收端用窄带滤波器提取出来作为相干载波,导频的功率要求比调制信号的功率小;(2)不需导频的方法:平方环法、COSTAS环法。 LPF m0(t) S AM(t) cosωc t AM信号波形的包络与输入基带信号成正比,故可以用包络检波的方法恢复原始调制信号。包络检波器一般由半波或全波整流器和低通滤波器组成: (1)整流:只保留信号中幅度大于0的部分。(2)低通滤波器:过滤出基带信号;(3)隔直流电容:过滤掉直流分量。实验内容: 1.AM相干解调框图。
MATLAB仿真实验报告
MATLA仿真实验报告 学院:计算机与信息学院 课程:—随机信号分析 姓名: 学号: 班级: 指导老师: 实验一
题目:编写一个产生均值为1,方差为4的高斯随机分布函数程序, 求最大值,最小值,均值和方差,并于理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示 G仁random( 'Normal' ,0,4,1,1024); y=max(G1) x=mi n(G1) m=mea n(G1) d=var(G1) plot(G1);
实验二 题目:编写一个产生协方差函数为CC)=4e":的平稳高斯过程的程序,产生样本函数。估计所产生样本的时间自相关函数和功率谱密度,并求统计自相关函数和功率谱密度,最后将结果与理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示。 N=10000; Ts=0.001; sigma=2; beta=2; a=exp(-beta*Ts); b=sigma*sqrt(1-a*a); w=normrnd(0,1,[1,N]); x=zeros(1,N); x(1)=sigma*w(1); for i=2:N x(i)=a*x(i-1)+b*w(i); end %polt(x); Rxx=xcorr(x0)/N; m=[-N+1:N-1]; Rxx0=(sigma A2)*exp(-beta*abs(m*Ts)); y=filter(b,a,x) plot(m*Ts,RxxO, 'b.' ,m*Ts,Rxx, 'r');
periodogram(y,[],N,1/Ts); 文件旧硯化)插入(1〕 ZMCD 克闻〔D ]窗口曲) Frequency (Hz) 50 100 150 200 250 300 350 400 450 500 NH---.HP)&UO 二 balj/ 」- □歹
PID控制系统的Simulink仿真分析
实验报告 课程名称:MATLAB语言与控制系统仿真 实验项目:PID控制系统的Simulink仿真分析专业班级: 学号: 姓名: 指导教师: 日期: 机械工程实验教学中心
注:1、请实验学生及指导教师实验前做实验仪器设备使用登记; 2、请各位学生大致按照以下提纲撰写实验报告,可续页; 3、请指导教师按五分制(优、良、中、及格、不及格)给出报告成绩; 4、课程结束后,请将该实验报告上交机械工程实验教学中心存档。 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一 种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递 函数的形式为 s K s Ki K s T s T K s U s E s G d p d i p ++=++==)1 1()() ()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T =为积分时间常数; p d d K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产 生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积 分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大 之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调 节时间。 三、实验使用仪器设备(名称、型号、技术参数等) 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在 Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的 传递函数构建出如下模型:
实验报告五SIMULINK仿真实验
实验五SIMULINK仿真实验 一、实验目的 考察连续时间系统的采样控制中,零阶保持器的作用与采样时间间隔对Ts 对系统稳定性的影响 二、实验步骤 开机执行程序,用鼠标双击图标,进入MA TLAB命令窗口:Command Windows在Command Windows窗口中输入:simulink,进入仿真界面,并新建Model文件在Model界面中构造连续时间系统的结构图。作时域仿真并确定系统时域性能指标。 图(6-1) 带零阶保持器的采样控制系统如下图所示。作时域仿真,调整采样间隔时间Ts,观察对系统稳定性的影响。 图(6-2) 参考输入量(给定值)作用时,系统连接如图(6-1)所示: 图(6-3) 三、实验要求 (1)按照结构图程序设计好模型图,完成时域仿真的结构图 (2)认真做好时域仿真记录 (3)参考实验图,建立所示如图(6-1)、图(6-2)、图(6-3)的实验原理图; (4)将鼠标移到原理图中的PID模块进行双击,出现参数设定对话框,将PID 控制器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例控制。
1. 单击工具栏中的图标,开始仿真,观测系统的响应曲线,分析系统性 能;调整比例增益,观察响应曲线的变化,分析系统性能的变化。 2. 重复步骤2-3,将控制器的功能改为比例微分控制,观测系统的响应曲线, 分析比例微分控制的作用。 3. 重复步骤2-3,将控制器的功能改为比例积分控制,观测系统的响应曲线, 分析比例积分控制的作用。 4. 重复步骤2-3,将控制器的功能改为比例积分微分控制,观测系统的响应曲 线,分析比例积分微分控制的作用。 5. 参照实验一的步骤,绘出如图(6-2)所示的方块图; 6. 将PID控制器的积分增益和微分增益改为0,对系统进行纯比例控制。不断 修改比例增益,使系统输出的过渡过程曲线的衰减比n=4,记下此时的比例增益值。 7. 修改比例增益,使系统输出的过渡过程曲线的衰减比n=2,记下此时的比例 增益值。 8. 修改比例增益,使系统输出呈临界振荡波形,记下此时的比例增益值。 9. 将PID控制器的比例、积分增益进行修改,对系统进行比例积分控制。不断 修改比例、积分增益,使系统输出的过渡过程曲线的衰减比n=2,4,10,记下此时比例和积分增益。 10、将PID控制器的比例, 积分, 微分增益进行修改,对系统进行比例、积分、 微分控制。不断修改比例、积分、微分增益,使系统输出的过渡过程曲线的衰减比n=2、4、10记下此时的比例、积分、微分增益值。 四、实验报告要求 (1)叙述零阶保持器的作用 (2)讨论采样时间间隔Ts对系统的影响。 (3)写出完整实验报告 附:step模块在sources库中 sum模块在math operations库中 scope模块在sinks库中 transfer fcn模块在continuous库中 zero-order hold模块在discrete库中
MATLAB实验SIMULINK仿真
实验九SIMULINK仿真 一、实验目的 SIMULINK是一个对动态系统(包括连续系统、离散系统和混合系统)进行建模、仿真和综合分析的集成软件包,是MATLAB的一个附加组件,其特点是模块化操作、易学易用,而且能够使用MATLAB提供的丰富的仿真资源。在 SIMULINK环境中,用户不仅可以观察现实世界中非线性因素和各种随机因素对系统行为的影响,而且也可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化。因此SIMULINK已然成为目前控制工程界的通用软件,而且在许多其他的领域,如通信、信号处理、DSP、电力、金融、生物系统等,也获得重要应用。对于信息类专业的学生来说,无论是学习专业课程或者相关课程设计还是在今后的工作中,掌握SIMULINK,就等于是有了一把利器。 本次实验的目的就是通过上机训练,掌握利用SIMULINK对一些工程技术问题(例如数字电路)进行建模、仿真和分析的基本方法。 二、实验预备知识 1. SIMULINK快速入门 在工程实际中,控制系统的结构往往很复杂,如果不借助专用的系统建模软件,则很难准确地把一个控制系统的复杂模型输入计算机,对其进行进一步的分析与仿真。1990年,Math Works软件公司为MATLAB提供了新的控制系统模型图输入与仿真工具,并命名为SIMULAB,该工具很快就在控制工程界获得了广泛的认可,使得仿真软件进入了模型化图形组态阶段。但因其名字与当时比较著名的软件SIMULA类似,所以1992年正式将该软件更名为SIMULINK。SIMULINK的出现,给控制系统分析与设计带来了福音。顾名思义,该软件的名称表明了该系统的两个主要功能:Simu(仿真)和Link(连接),即该软件可以利用系统提供的各种功能模块并通过信号线连接各个模块从而创建出所需要的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真和分析。 ?SIMULINK的启动 首先启动MATLAB,然后在MATLAB主界面中单击上面的Simulink按钮或在命令窗口中输入simulink命令。命令执行之后将弹出simulink的模块库浏览器,如图1所示。 ?SIMULINK的模块库 Simulink的模块库有两部分组成:基本模块和各种应用工具箱。 ?系统提供的应用工具箱有: Communications Blockset(通信模块集) Control System Toolbox(控制系统工具箱) Dials & Gauges Blockset(面板和仪表模块集) DSP Blockset(数字信号处理模块集)
Simulink实验报告
实验一:AM 信号的调制与解调 实验目的:1.了解模拟通信系统的仿真原理。 2.AM 信号是如何进行调制与解调的。 实验原理: 1.调制原理:AM 调制是用调制信号去控制高频正弦载波的幅度,使其按调制信号的规律变化的过程,就是按原始电信号的变化规律去改变载波某些参量的过程。 + m(t) S AM (t)A 0 cos ωc t AM 信号的时域和频域的表达式分别为: ()()[]()()()()t t m t A t t m A t S C C C AM ωωωcos cos cos 00+=+= 式(4-1) ()()()[]()()[]C C C C AM M M A S ωωωωωωδωωδπω-+++ -++=2 1 0 式(4-2) 在式中,为外加的直流分量;可以是确知信号也可以是 随机信号,但通常认为其平均值为0,即。其频谱是DSB SC-AM 信号的频谱加上离散大载波的频谱。 2.解调原理:AM 信号的解调是把接收到的已调信号还 原为调制信号。 AM 信号的解调方法有两种:相干解调和包 络检波解调。 AM 相干解调原理框图如图。相干解调(同步解调):利用
相干载波(频率和相位都与原载波相同的恢复载波)进行的解调,相干解调的关键在于必须产生一个与调制器同频同相位的载波。如果同频同相位的条件得不到满足,则会破坏原始信号的恢复。相干载波的提取:(1)导频法:在发送端加上一离散的载频分量,即导频,在接收端用窄带滤波器提取出来作为相干载波,导频的功率要求比调制信号的功率小;(2)不需导频的方法:平方环法、COSTAS环法。 LPF m0(t) S AM(t) cosωc t AM信号波形的包络与输入基带信号成正比,故可以用包络检波的方法恢复原始调制信号。包络检波器一般由半波或全波整流器和低通滤波器组成: (1)整流:只保留信号中幅度大于0的部分。(2)低通滤波器:过滤出基带信号;(3)隔直流电容:过滤掉直流分量。实验内容: 1.AM相干解调框图。
实验六 SIMULINK基本用法
MATLAB 实验 0900320212 董肃艺 实验六 SIMULINK 基本用法 一 实验目的 1. 学习SIMULINK 软件工具的使用方法; 2. 用SIMULINK 仿真线性系统; 二.实验内容 练习6-1 在SIMULINK 环境下,作T1、T2、T3系统的阶跃响应; 将T1、T2、T3系统的阶跃响应图在同一Scope 中显示。 1 332122242222332221+++=+++=++= s s s T s s s T s s T
练习6-2典型二阶欠阻尼系统的传递函数为: 极点位置: 式中: 在SIMULINK 环境下,作该系统在以下参数时的仿真: ① 设ωa=1, σ=0.5,1,5 ,求阶跃响应,(用同一Scope 显示); ② 设σ=1 , ωa=0.5,1,5 ,求阶跃响应在(用同一Scope 显示); ) (2)(2)(22222222σωσσωωξωω++++=++=a a n n n s s s s S G j S ω σ±-=) cos(;1;2θξξωωξωσ=-==n a n
③设 求阶跃响应(用同一Scope 显示); ④设 求阶跃响应,(用同一Scope 显示); 阶跃响应的时间:0≤t ≤10,阶跃信号幅值为+2V 。分析参数变化(增加、减少与不变)对阶跃响应的影响。 2 5,2,22,21==n ωξ0 006045302==θω n
练习6-3 已知某三阶系统的开环传递函数为: k=10, 5.0=ξ ) 12)(11.0()(2+++=s s s K s G ξ 要求:在Simulink 仿真环境下作李沙育图形。
复杂过程控制系统设计与Simulink仿真
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
《MATLAB与控制系统。。仿真》实验报告
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一MATLAB环境的熟悉与基本运算(一)实验二MATLAB环境的熟悉与基本运算(二)实验三MATLAB语言的程序设计 实验四MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MATLAB常用命令 表1 MATLAB常用命令 变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。