无人水下航行器近海底空间路径规划方法
滨水空间的处理与竖向设计
滨水空间的处理与竖向设计 作为“水陆边际”的滨水绿地,多为开放性空间,其空间的设计往往兼顾外部街道空间景观和水面景观,人的站点及观赏点位置处理有多种模式,其中有代表性的有以下几种:外围空间(街道)观赏;绿地内部空间(道路、广场)观赏、游览、停憩;临水观赏;水面观赏、游乐;水域对岸观赏等。为了取得多层次的立体观景效果,一般在纵向上,沿水岸设置带状空间,串连各景观节点(一般每隔300~500m 设置一处景观节点),构成纵向景观序列。竖向设计考虑带状景观序列的高低起伏变化,利用地形堆叠和植被配置的变化,在景观上构成优美多变的林冠线和天际线,形成纵向的节奏与韵律;在横向上,需要在不同的高程安排临水、亲水空间,滨水空间的断面处理要综合考虑水位、水流、潮汛、交通、景观和生态等多方面要求,所以要采取一种多层复式的断面结构。这种复式的断面结构分成外低内高型、外高内低型、中间高两侧低型等几种。低层临水空间按常水位来设计,每年汛期来临时允许被淹没;中层空间只有在较大洪水发生时才会被淹没。这两级空间可以形成具有良好亲水性的游憩空间。高层台阶作为千年一遇的防洪大堤。各层空间利用各种手段进行竖向联系,形成立体的空间系统。 滨水绿地陆域空间和水域空间通常存在较大高差,由于景观和生态的需要,要避免传统的块石驳岸平直生硬的感觉,临水空间可以采用以下几种断面形式进行处理(图2)。
(1)自然缓坡型:通常适用于较宽阔的滨水空间,水陆之间通过自然缓坡地形,弱化水陆的高差感,形成自然的空间过渡,地形坡度一般小于基址土壤自然安息角。临水可设置游览步道,结合植物的栽植构成自然弯曲的水岸,形成自然生态、开阔舒展的滨水空间。 (2)台地型:对于水陆高差较大,绿地空间又不很开阔的区域,可采用台地式弱化空间的高差感,避免生硬的过渡。即将总的高差通过多层台地化解,每层台地可根据需要设计成平台、铺地或者栽植空间,台地之间通过台阶沟通上下层交通,结合种植设计遮挡硬质挡土墙砌体,形成内向型临水空间。 (3)挑出型:对于开阔的水面,可采用该种处理形式,通过设计临水或水上平台、栈道满足人们亲水、远眺观赏的要求。临水平台、栈道地表标高一般参照水体的常水位设计,通常根据水体的状况,高出常水位0.5~1.0m ,若风浪较大区域,可适当抬高,在安全的前提下,尽量贴近水面为宜。挑出的平台、栈道在水深较深区域应设置栏杆,当水深较浅时,可以不设栏杆或使用坐凳栏杆围合。
无人水下航行器声呐装备现状与发展趋势
无人水下航行器声呐装备现状与发展趋势 无人水下潜航器(UUV)最早出现于20世纪60年代。在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。 美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示:
美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查; ⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战; ⑨时敏打击。 不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的
UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。 UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。 通信声呐主要用于UUV与协同行动的其他UUV、母船(艇)或通信浮标之间的信息链接;导航声呐为UUV的安全航行和执行作业任务提供其位置、航向、深度、速度和姿态等信息;探测声呐主要用于警戒、探测、识别水中或沉底目标信息,对水下地形、地貌、地质进行勘察和测绘。承担不
无人水下航行器声呐装备现状与发展趋势
无人水下潜航器(UUV)最早出现于20世纪60年代。在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。 美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示。 表1 不同级别UUV任务需求优先级
美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查;⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战;⑨时敏打击。
不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。 UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。 图1 UUV主要声呐装备
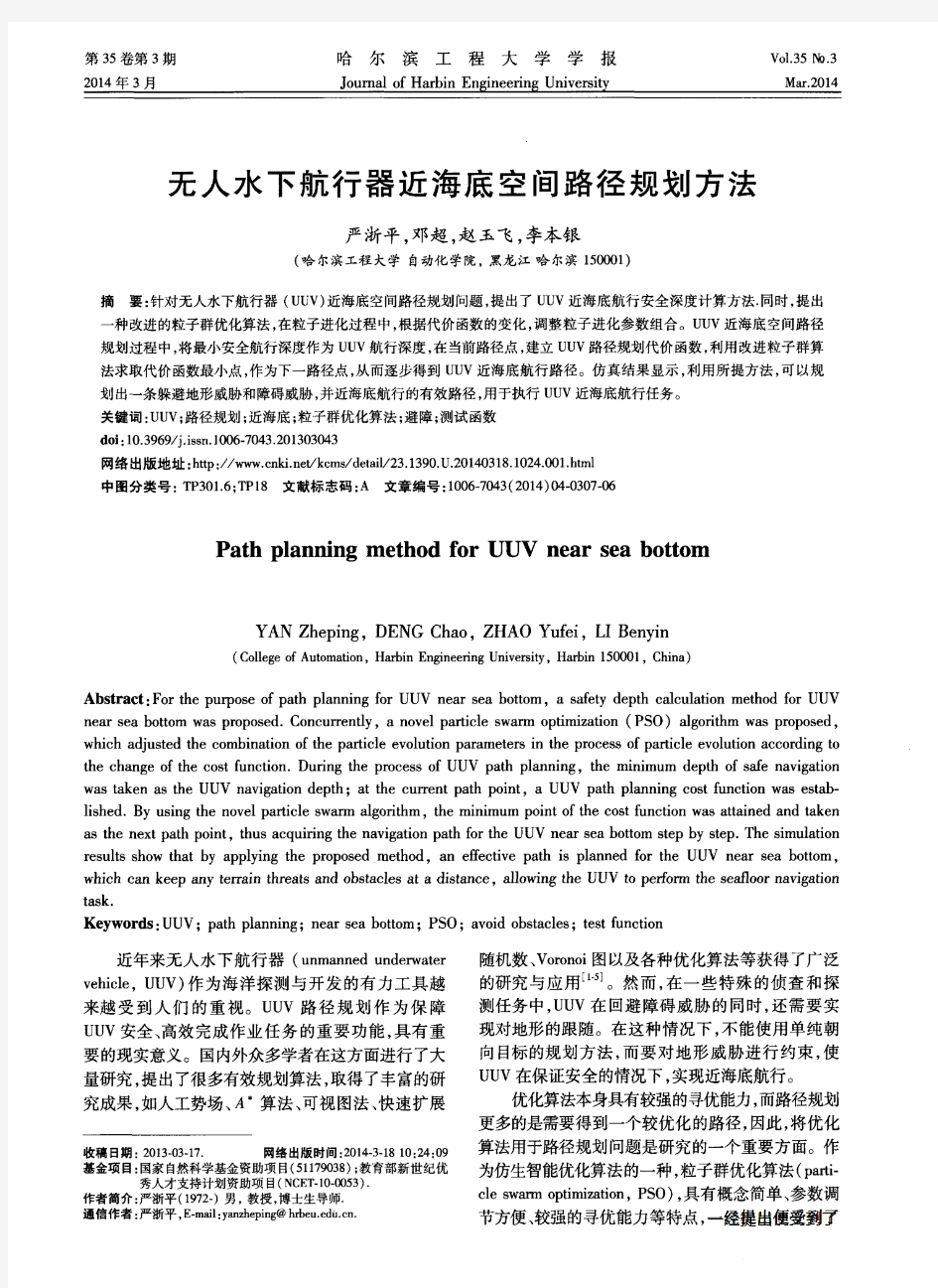
多机器人路径规划研究方法
多机器人路径规划研究方法 张亚鸣雷小宇杨胜跃樊晓平瞿志华贾占朝 摘要:在查阅大量文献的基础上对多机器人路径规划的主要研究内容和研究现状进行了分析和总结,讨论了多机器人路径规划方法的评判标准,并阐述了研究遇到的瓶颈问题,展望了多机器人路径规划方法的发展趋势。 关键词:多机器人;路径规划;强化学习;评判准则 Abstract:This paper analyzed and concluded the main method and current research of the path planning research for multi robot.Then discussed the criterion of path planning research for multi robot based large of literature.Meanwhile,it expounded the bottleneck of the path planning research for multi robot,forecasted the future development of multi robot path planning. Key words:multi robot;path planning;reinforcement learning;evaluating criteria 近年来,分布式人工智能(DAI)成为人工智能研究的一个重要分支。DAI研究大致可以分为DPS(distributed problem solving)和MAS(multi agent system)两个方面。一些从事机器人学的研究人员受多智能体系统研究的启发,将智能体概念应用于多机器人系统的研究中,将单个机器人视做一个能独立执行特定任务的智能体,并把这种多机器人系统称为多智能体机器人系统(MARS)。因此,本文中多机器人系统等同于多智能体机器人系统。目前,多机器人系统已经成为学术界研究的热点,而路径规划研究又是其核心部分。 机器人路径规划问题可以建模为一个带约束的优化问题,其包括地理环境信息建模、路径规划、定位和避障等任务,它是移动机器人导航与控制的基础。单个移动机器人路径规划研究一直是机器人研究的重点,且已经有许多成果[1~3],例如在静态环境中常见的有连接图法、可视图法、切线图法、Voronoi图法、自由空间法、栅格法、拓扑法、链接图法、Dempster Shafer 证据理论建图等;动态环境中常见的有粒子群算法、免疫算法、遗传算法、神经网络、蚁群算法、模拟退火算法、人工势场法等。然而,多机器人路径规划
《海洋空间的开发利用》教案3
《海洋空间的开发利用》教案 教学目标: .了解海洋空间利用的现状和发展前景。 .了解海洋交通运输和港口建设的情况,以及围海造陆等扩大生活空间的状况。 .了解海洋环境问题。 能力目标 .学会运用综合分析法,从气候、交通运输、通信等方面来说明海洋环境对人类的影响。.分析海洋环境问题的产生和预防、解决措施,提高和增强海洋意识。 德育目标 .通过海洋空间资源的开发和利用的学习,增强学生的海洋国土意识。 .正确认识海洋环境保护的重要意义,树立可持续利用海洋的观念。 教学重点 .海洋空间利用和港口建设。 .海洋环境保护。 教学难点 .海洋港口建设与交通运输、经济状况等是密切相关的,应注意其关联性。 .海洋环境保护的具体实施与思想教育的渗透。 一、.海洋可利用空间及特点 可利用空间环境的复杂性和特殊性空间利用缺点 海上气象状况和海水运动多变 技术③难度大,资金投入海中海水①腐蚀性强、海冰破坏性大 大、风险大 海底黑暗、②高压、低温、缺氧 .海洋空间开发的优点:空间广阔,便于④立体利用;地价便宜,不需搬迁人口;海底⑤隐蔽性能好,海中温度、压力比较稳定。世纪教育网版权所有 .开发的意义:缓解沿海地区⑥人地矛盾,开发海洋资源,拓展人类生存空间。 二、海洋空间开发利用的主要方式 .主要领域:交通运输、生产、⑦居住、通讯、⑧储藏和文化娱乐等。 .海洋交通与通讯 ()海洋运输的要素:⑨海港码头、运输船舶和海上航道。 ()优点:吨位大、⑩速度快、续航能力强。 ()变化:从海面向海底和海洋上空拓展,如建造?海底隧道、海底管道、?跨海大桥以及铺设海底光缆等。
.围海填海造陆 ()概念 错误! ()其他形式:?人工岛、海上城市、?海上人工码头、海上工厂、海上作业平台等。 三、海底储藏 .海底空间特点:广阔、水温较低、?温度变化平缓,远离居民区,?缺氧。 .适宜存放物品:易燃易爆的危险品,易霉变、易腐烂的?食品。 【达标训练】 一、选择题 从海洋中寻找生存的空间自古就有,目前也是人类利用海洋空间的主要方式之一。结合所学知识回答~题。 .下面四幅图所示的景观属于围海造陆的是( ) .海上工厂与陆地工厂相比,所没有的优点是( ) .不占陆地面积.工厂主体小 .离加工原料地近.建造及管理费用低 .下列物品不适合在海底储存的是( ) .石油.天然气 .炸药.雾凇 香港地形以山地丘陵为主,有著名的天然良港,结合图文信息,回答~题。 .香港建港的有利自然条件是( ) .地平坡缓.岛多浪小 .滩阔岸直.河多沙厚 .填海造陆对香港的影响有( ) .港区行船更加通畅.经济活动远离了海岸 .海洋生态得以维护.利于沿海功能区布局 .下列有关人类利用海洋空间资源错误的说法是( ) .日本建设海上机场和人工岛是为了缓解日本人多地少的矛盾 .荷兰很早就用风车排水的方法,人工围海造陆 .英法海底隧道与日本濑户跨海大桥交通流量都受海洋气候的影响 .海底储藏大米主要是因为海底温度变化小且温度低
水下无人航行器组合导航研究
本科毕业设计论文题目水下无人航行器组合导航研究 专业名称 学生姓名 指导教师 毕业时间2014.06
毕业 任务书 一、题目 水下无人航行器组合导航研究 二、指导思想和目的要求 1.利用已有的专业知识,培养学生的解决实际工程问题的能力 2.锻炼学生的科研工作能力和培养学生团队合作及攻关能力 三、主要技术指标 1.捷联惯导原理分析及模型建立 2.应用卡尔曼滤波方法建立组合导航系统模型 3.应用matlab进行仿真实现 四、进度和要求 第01周----第02周:撰写开题报告; 第03周----第05周:组合导航相关基础知识学习; 第06周----第07周:熟悉Matlab等相关软件; 第08周----第13周:设计组合导航滤波方案和滤波器结构; 第14周----第16周:对设计方案进行实验验证; 第17周----第18周:撰写毕业设计论文,论文答辩。 五、主要参考书及参考资料 [1]胡小平.自主导航理论与应用.国防科技大学出版社.2002. [2]万海. 多传感器数据融合及其应用. 西安电子科技大学出版社. 2004. [3]干国强. 导航与定位. 国防工业出版社. 2000. [4]秦永元. 卡尔曼滤波与组合导航原理西北工业大学. 1998. [5]邹维宝. INS/GNSS/SAR组合导航系统及其智能化信息融合技术的研究. 西北 工业大学. [6]Dasgupta Sumantra. An augmented-reality-based real-time panoramicvisi on System for autonomous navigation.IEEE Transactions on Systems,Man,and Cybernetics Part A:Systems and Humans.2006. I
路径规划论文:路径识别与路径规划方法的研究
路径规划论文:路径识别与路径规划方法的研究 【中文摘要】随着科学技术的发展,各种各样的机器人陆续出现,机器人越来越受到人们的重视,而中国大学生机器人大赛暨Robocup 公开赛更是吸引了很多爱好者。机器人游中国可看成迷你的旅游,这跟目前假期短,如何能够合理安排,多参观几个景点的问题相吻合,故也大大引起大家的兴趣。本文以游中国机器人为研究对象,研究路径规划和路径识别的方法。基本思想是:首先根据比赛要求,建立大赛的基本界面平台,对图像进行数据存储,为遍历做准备。然后根据经典的遍历方法,通过改进来实现景点的遍历,比较得到一条较理想的旅游 路线。另一方面机器人在前进时要根据看到的路况来控制速度,因此对道路情况进行提取,并通过一系列方法去由环境等引起除噪声及冗余信息,得到较好的道路目标。然后对前方路况的几种情况进行提取分析,利用角点检测的方法来确定分支数,使机器人能够更好的选择 路线。具体实现过程如下:1.地图的存储。首先建立大赛涉及的基本界面平台,分析比较了几种常用的图存储方法的优劣。2.遍历算法。首先介绍了人工智能中常用的几种遍历算法,并对各个算法的复杂性和适用情况进行分析比较。根据该项目中的需要加以改进,得到不同的遍历路线。再... 【英文摘要】With the development of science and technology, a variety of robots showed up, that’s the reason that more and more people pay attention to the robot. However, Robot
全国海洋功能区划(2011-2020年)
全国海洋功能区划(2011-2020年) 来源:中国海洋报发布时间:2012-04-18 [打印本页] [关闭窗口] 国务院批准《全国海洋功能区划(2011~2020年)》 (公开版) 2012年3月3日,国务院批准了《全国海洋功能区划(2011~2020年)》(以下简称《区划》),这是继2011年国家“十二五”规划提出“推进海洋经济发展”战略后,国家依据《海域使用管理法》《海洋环境保护法》等法律法规和国家有关海洋开发保护的方针、政策,对我国管辖海域未来10年的开发利用和环境保护做出的全面部署和具体安排。《区划》由国家海洋局会同有关部门和沿海11个省、自治区、直辖市人民政府编制,《区划》范围为我国的内水、领海、毗连区、专属经济区、大陆架以及管辖的其他海域,《区划》期限为2011年至2020年。 国务院批复指出,海洋是我国经济社会可持续发展的重要资源和战略空间。当前,我国海洋经济发展战略已进入全面实施的新阶段,统筹协调海洋开发利用和环境保护的任务艰巨。要坚持在发展中保护、在保护中发展的原则,合理配置海域资源,优化海洋空间开发布局,促进经济平稳较快发展和社会和谐稳定。 国务院批复强调,海洋功能区划是合理开发利用海洋资源、有效保护海洋生态环境的法定依据,必须严格执行。通过实施《区划》,到2020年,围填海等改变海域自然属性的用海活动得到合理控制,渔民生产生活和现代化渔业发展得到保障,海洋保护区、重要水产种质资源保护区得到保护,主要污染物排海总量制度基本建立,海洋环境灾害和突发事件应急机制得到加强,遭到破坏的海域海岸带得到整治修复,海洋生态环境质量明显改善,海洋可持续发展能力显著增强。
城市滨水游憩空间规划设计
流淌着的灵性——城市滨水游憩空间规划设计 人类自古逐水而居。时代的发展,生活区域不断的扩展,滨水生活空间已经成为城市形象的重要代言。从单一的依水村落到现代功能多样化的港口城市、滨湖公园等,在经历了创造、模仿、复制、再创造一系列阶段后,滨水空间的打造手法和景观设计已经开始个性化,生态化、游憩化和人性化的再生阶段。 水,是灵气汇聚之所。滨水空间的景观打造也应延续这种特性,在城市滨水区域创造颇具灵性的特色空间。 一、城市空间与水案共荣共生 城市与水的关系是由来已久的,河流、湖泊、海案以及它们所产生的滨水空间,在城市规划和景观规划中逐渐被关注,愈来愈多的被作为城市形象的重要突破点。城市滨水空间,已经成为展现城市魅力、挖掘城市活力的重要展台。我国现代的城市规划与景观设计行业具有发展期短、发展速度较快的特点,致力于滨水空间方面的研究时间不长。总结滨水空间的发展,大致经历了三个主要阶段。 1、大格局的自然、经济与生活空间 解放以前,我国滨水空间具有三个主要特点:自然空间、经济空间和生活空间。自然空间以山水的自然衔接,山水交融的大空间格局为主,是开发较少的自然形态;经济空间大多以运河航运等功能为依托形成的城市滨水商贸、运输为主要功能的经济生活空间;生活空间是把水作为城市交通的主要形式。 2、工业化时代使滨水生活空间向滨水经济空间转变 文革前期,现代城市雏形初现,城市功能和经济格局受政策影响较大,发生了较大的变化,工业化时代来临。老城内的河、湖被填埋,建筑和公路取而代之。这一时期,城市滨水
生活空间基本消失,仅一些经济发展缓慢的城市滨水空间得以保留,但逐渐向滨水经济空间转变。 3、现代城市滨水空间极剧减少和缓慢恢复的两个重要时期 改革开发以后,经济迅猛发展所带来的城市规模的膨胀,交通方式的改变以及经济利益的驱动,使城市周边河道被严重侵占,取而代之的是僵硬的街道和林立的高楼,河道被大面积填埋,水域污染,港口废弃,城市滨水空间也随之极剧缩小。 二十世纪以来,中国城市发展虽然仍然高速跃进,但逐渐趋于理性化,城市滨水空间的研究得到了重视,人们逐渐认识到它不但是城市景象亟待修复的一面,更是城市整体发展战略中必须从生态、经济、交通、城市设计、城市特色和文化等多方面综合考虑的一环。城市滨水空间的发展和研究进入黄金时代。 二、“游憩”使滨水空间更加丰富 长期的发展,使城市规划形成了一定的模式化思路,法规化条例也已经成熟。针对这种固有的、模式化的规划,近几年,“游憩”逐渐被规划界讨论和认可。国外在此方面的研究稍微成熟,但在国内,尚处于探讨阶段。 1、游憩(recreation)来源于拉丁语recreatio,意思是恢复更新,英文为“recreation”,原意是“to refresh”,含有休养和娱乐两层意思。 2、“游憩中国网”认为,游憩是指人们在闲暇时间,基于城市、乡村、景区、度假区四类空间基础上,进行的具有生态、文化、康体或游乐功能的,能够内在满足自我、外在实现休闲的活动的总和。 为了便于研究及应用,“游憩中国网”将“游憩”的外延界定为: 一方面,“游憩”中的“游”可基本等同于“旅游”,“憩”可基本等同于“休闲”。当然,“旅游”与“休闲”之间的关系不在我们这一定义的考虑范围内。
基于展示城市文化特色的滨水空间规划设计_宿迁市古黄河西楚文风概要
表1 古黄河楚地文风景区存在的问题 张鑫磊张彧王云翔曹隽 基于展示城市文化特色的滨水空间规划设计 ———宿迁市古黄河西楚文风景区景观设计 【摘要】在对宿迁地区历史文化特征分析的基础上,就古黄河历史文化特色进行了论述,探讨历史文化与滨水空间的关系,及如何在滨水景观中传承历史文化。现以宿迁市古黄河西楚文风景区景观规划为例,对该地的资源现状作了调查,剖析今后发展方向,探讨如何对历史文脉进行归整、再现,最后讨论滨水景观设计对历史古迹及文化再现的重要性和宿迁滨水城市发展的特色之处,以期在城市建设中尽量发扬和构建地域文化特色。 【 关键词】城市;滨水空间;文化;规划设计城市是文化的集中表现,充分认识城市的文化意蕴,有助于我们从本质上去认识城市、把握城市,对城市规划建设的理论研究和实践,有着十分重要的意义。优秀的城市滨水空间规划设计,对整个城市文化特色的展示有着重要的意义。在现今每个城市都非常关注城市特色的展示,人们自然对公共空间的历史文化体现也愈来愈关注,特别对城市河流、水道的文化特色期待也就愈来愈多。因此,城市特色、历史文化与滨水空间的关系显得尤为突出,城市滨水景观的文化塑造,再度成为景观规划设计的重点。 1规划项目背景与现状分析 1.1背景分析 滨水区是城市中一个特定的空间地段,是
指与“河流、湖泊、海洋毗邻的土地或建筑;城镇邻近水体的部分”。国内外对于城市滨水空间的研究有着很长的历史,我国长江流域的很多城市都有着水的文化积淀。宿迁城市水网密集,滨水区建设也有很长的历史渊源,黄河 公园、运河公园、湖滨新城等。这些都是城市的自然历史文化特色,同时也是构成城市整体架构的主要因素之一,可以说城市滨水空间在城市的产生、选址、发展和繁荣的这一系列过程中都发挥着举足轻重的作用。 城市文化特色就是指区别于其他城市的独有的历史文化积淀,是其地域文化与其景观空间的完美结合,是人们认知一个城市并对这个城市所体验的形象性、艺术性和生活性的概括。 宿迁素有“西楚霸王”故里、 “杨树之 乡”的生态城市,历史悠久,运河文化、西楚文化积淀深厚。现今宿迁古黄河结束以往通航、行洪的历史使命,将担任体现宿迁滨水城市特色的新使命。近几年宿迁市政府首先从古黄河清污和驳岸整治开始,经过精心规划和多年的建设,取得一些成绩,但同时一些严重的环境问题依然存在。 1.2现状分析 楚地文风景区位于古黄河-运河风光带风景名胜区内,紧邻宿迁学院,周边有项王路、黄河南路、厦门路、富康大道等城市主干道与城市相连,面积121.3公顷。 目前古黄河成为宿迁城市的一条景观河道。经过调查分析,发现目前古黄河两岸在社会经济、用地布局、生态环境、历史文化和沿河景观方面都存在着很多问题(表1。 但是宿迁古黄河也有很多潜在的优势条件。它不仅是宿迁城市的主要水脉,还是西楚文化的源泉,是宿迁先民的摇篮。
滨水城市空间规划设计(美国AOA案例研究)
间案例研究 滨水城市空间案例研究 滨水城市空 AOA DESIGN GROUP INC.
案例一:温哥华城南南部滨水区空间设计
温哥华南 z 指标 Fast Facts z Yaletown面积: 50公顷 z False Creek北部面积: 80 公顷 :130 z总面积: 130公顷 z绿地面积: 20公顷 z海岸线长度: 3公里 z平均容积率: >3.0 :90m x z平均地块规模: 90m x 180m (16,000m2 approx) z平均住宅地块规模: 280m2- 3,250m2 z地区人口规模: 23,000 approx z近期住宅销售价格: 93m2 (1,000ft2) = USD394,000 (i.e. USD4,240 per m2) 南部滨水区现状
历史背景History 本区域历 原来是木材加工地区,然后服装仓储区,接着成为地铁总站,再成为86届世界博览会会址。 在世界博览会之后此区域成 为一个亮点,80年代后期 开始了区域改造,许多传统的建筑物被保留或重新利用 历史背景
本地区现阶 z 流行的现代都市滨水社 z商业区混合了高中低档 以及五星级酒店 z独特但功能混合的建筑 活类型选择 拥有完善的步行慢跑 z拥有完善的步行、慢跑 z具有特色的景观、照明 z大量的码头停泊设施以 z附近社区和历史地铁展 z为步行者提供的交通、 z公园贯穿整个城市,通 活动场所 z以运动为主题的公园, 很少的建筑;提供了都 z公园提供了非常舒适的 z住宅区和公园中布置了 z公园面向户外景观,提 105 z10.5米宽的断断续续的 阶段发展状况 社区包含了居住区、商务区、餐饮、零售精品店、艺术长廊 档饭店、高科技公司、家具店、艺术长廊、汽车公司展示区 筑,提供从艺术型阁楼到现代滨水公寓的多种混合的居住生 跑单车和宠物散步设施的户外生活方式 跑、单车和宠物散步设施的户外生活方式。 明、艺术装饰品和连续的绿地空间。 以及称为“Aqua Bus”的为游览者服务的轮渡 展览中心用于支持当地的艺术文化和休闲活动 展览中心用于支持当地的艺术、文化和休闲活动。 户外座椅和其他活动设施随处可见。 通过滨水的步行道连接,后者是步行、慢跑和自行车的主要 用于团队活动和孩子玩耍;用于休闲活动的公园其中布置 都市生活方式的绿洲 的环境和钢筋水泥的建筑群中一些独特的景观视点 了商业区,其中有超市、饭馆、银行、诊所、健身房、 提供一览无余的水景视野 的滨水步行道和自行车道向市区延伸
美军水下无人系统发展探讨
美军水下无人系统发展探讨 发表时间:2019-01-11T15:08:36.013Z 来源:《新材料·新装饰》2018年7月上作者:黄凤军 [导读] 美军试图通过大力发展以自主潜航器为主体的水下战无人装备,加强前沿水下无人系统预置,全力推进水下无人区域监控系统布建,突出攻关水下自主导航、通信组网、自主协同等先进技术 海军装备部 摘要:美军试图通过大力发展以自主潜航器为主体的水下战无人装备,加强前沿水下无人系统预置,全力推进水下无人区域监控系统布建,突出攻关水下自主导航、通信组网、自主协同等先进技术,打造新型水下作战体系。本文对美军的水下无人系统的发展进行了论述。关键词:水下无人系统;美国海军;无人潜航器;水下战 1 突出水下无人系统对于联合作战的重要性 长期以来,美国海军对于水下无人系统的研发和应用更多偏重于执行ISR和反水雷等作战辅助任务。随着海军作战能力需求的变化,水下无人系统能力的提升,美国海军正重新审视水下无人系统在联合作战中的地位与作用。 1.1 积极利用水下无人系统增强水下综合作战能力 美国海军认为,美国的潜在对手正在构建能对美军舰艇及水下基础设施形成威胁的能力,美国在水下战领域的优势正不断被削弱。而核潜艇等先进水下平台,由于建造和使用成本高昂,数量上无法完全满足作战需求,迫切需要补充新型作战力量,与潜艇形成优势互补,从而增强综合水下战能力。《下一代水下无人系统》报告指出,水下无人系统能够有效补充并拓展有人水下系统的能力,对当前因缺乏有效作战手段而难以执行的军事任务,可由无人作战系统来完成,即便是核潜艇能够完成的任务,水下无人系统的协同和配合也能大幅提高作战效能。 1.2 积极增强水下无人系统跨域协同作战能力 如何充分发挥水下作战优势以弥补其他作战领域面临的严峻挑战,是美国海军重点关注的问题。创造性地使用水下无人系统,能为美国海军提供全新作战能力。美国海军认为,未来水下无人系统的应用模式将主要是联合使用和分布式作战,联合形式包括:多形态无人系统跨域协同或组网、异构无人系统协同或组网、子母式无人系统接力作战、跨介质组合式无人系统等。美国海军于2016年“先进海军技术演习”期间,演示了“潜艇-无人潜航器-无人机”子母式协同作战的能力。上浮式有效载荷和深海预置武器等新概念装备的出现,也可视为该努力的一部分。 1.3 规模化发展水下战无人装备 在无人潜航器方面,重点发展巨型、滑翔型、仿生型等自主无人潜航器。据有关资料显示,美无人潜航器2020年可能达到1000套左右,2025年可能达到2000套左右。 巨型自主无人潜航器典型代表为“大排水量无人潜航器”,长13.5米,直径1.5米,排水量约10吨,设计续航时间为120天,自主性强,可携带多种载荷,能遂行多种任务,计划2017年服役,2020年前装备一个中队。 滑翔型无人潜航器具有低成本、低功耗和长航时等特征,适合担负大范围海洋调查、长时间水下侦察监视等任务,已入役的有“喷射”“斯洛克姆”“海洋滑翔者”“近海战场感知—滑行者”等,美军将加大这些滑翔型自主无人潜航器的采购数量。 仿生型无人潜航器如“幽灵泳者”“间谍水母”等。反潜无人水面艇方面,重点发展“反潜持续跟踪无人艇”。“反潜持续跟踪无人艇”满载排水量约157吨,最大速度为27节,作战半径为3000千米,可在不补充燃料的情况下持续执行30天跟踪任务,暴露水面外体积小,且经过隐身设计,噪声小,平台稳性好,机动能力强,具有高可靠性,自主化程度高。 潜射无人机方面,目前重点发展“潜射扫描鹰”“黑翼”等型号。潜射无人机可能担负的任务包括ISR、电子战以及对抗反潜机等。 美海军在小克里克-斯多利堡联合远征基地(JEBLC-FS)完成了对“幽灵泳者”(GhostSwimmer)无人潜航器的系列试验。 2 探索水下无人系统的创新性作战样式 随着先进军事技术的进步和能力的提升,水下无人系统可胜任的任务边界也不断扩展。《2025年自主水下航行器需求》报告在传统的ISR、反水雷等7项使命任务外,又面向未来作战,提出了海床战、反无人潜航器战和非致命海上控制等创新性作战概念。 2.1 海床战 海床战指在敌方近海实施的、对敌方海床基础设施和无人预置传感器及武器进行干扰和打击的水下作战。由于潜在对手正积极发展反潜飞机、舰艇、潜艇、海床武器和传感器系统,以探测、定位和攻击其他国家的潜艇。因此,水下兵力在敌方“反介入/区域拒止” (A2/AD)作战区域内执行多样化任务时,面临的风险不断增大。所以,美国海军提出开发相关能力,以致瘫、欺骗和摧毁敌方海床基础设施、无人反潜传感器与系统等要害军事目标。 2.2 反无人潜航器战 反无人潜航器战指采用多种手段,使敌方难以运用无人潜航器等水下无人系统进行有效作战,作战环境包括前沿作战和领海防御作战两种。美国无人潜航器能力不断发展,但潜在对手也在发展其自主潜航器能力,并且正迅速接近美国水平。因此,美国海军希望研发相关方法、技术与战术,以应对敌方无人潜航器的探测、侦察以及在必要时对敌方无人潜航器进行攻击。 3 建立面向实用的水下无人系统采办理念 美国海军认为,当前的水下无人系统采办理念源于潜艇等有人主战平台的研发和采办,对于系统综合能力要求过高,采办过程繁琐,不适合水下无人系统这种采购量大且作战寿命有限的低成本系统,迫切需要转变装备建设思路。 3.1 有选择地降低战技性能要求 美国海军研究发现,当前水下关键技术发展仍面临瓶颈,过高要求隐身、水下通信、自主控制、能量存储、部署和回收等能力,在一定程度上反而制约了水下无人系统的应用。因此应考虑从实用性出发,改变设计思路,有选择地降低战技性能要求,有助于克服某些困扰水下无人系统发展的技术障碍。如放松对隐身的限制,则水下无人系统可定期浮出水面,从而改善水下无人系统的通信能力,也使其可
海上丝绸之路沿线国家海洋空间规划进展研究
Advances in Marine Sciences 海洋科学前沿, 2019, 6(2), 64-69 Published Online June 2019 in Hans. https://www.360docs.net/doc/b14785188.html,/journal/ams https://https://www.360docs.net/doc/b14785188.html,/10.12677/ams.2019.62008 Progress Study on Maritime Space Planning of Countries along the Maritime Silk Road Xiaojing Cui1, Wei Xu2, Xue Meng3, Xinchun Sang3, Yan Li4 1Ocean University of China, Qingdao Shandong 2Ocean Environment Science and Technology Co. Ltd., Tianjin 3National Marine Technology Center, Tianjin 4China Oceanic Development Foundation, Beijing Received: May 13th, 2019; accepted: May 28th, 2019; published: Jun. 4th, 2019 Abstract On the basis of literature analysis, this paper combined the conference materials of “international BBS on maritime space planning of island countries along the Maritime Silk Road” and the website materials of “https://www.360docs.net/doc/b14785188.html,/” to integrate the current situation of Maritime Space Planning of countries along the Maritime Silk Road, and discussed and analyzed its characteristics. The study found that most countries along the Maritime Silk Road have just started Maritime Space Planning and are highly dependent on international assistance. Cambodia, Indonesia, the Philippines, Lithuania and Latvia have done a good job in formulating and implementing Marine Space Planning. It is of great reference value for China to improve the Marine Functional Zoning system, strengthen cooperation with maritime silk road countries and promote the construction of “One Belt And One Road”. Keywords Maritime Silk Road, Marine Space Planning, Progress, Status Quo 海上丝绸之路沿线国家海洋空间规划进展研究 崔晓菁1,徐伟2,孟雪3,桑新春3,李艳4 1中国海洋大学,山东青岛 2海域海岛环境科技研究院(天津)有限公司,天津 3国家海洋技术中心,天津 4中国海洋发展基金会,北京 收稿日期:2019年5月13日;录用日期:2019年5月28日;发布日期:2019年6月4日
水下机器人发展趋势
关键词:水下机器人、智能水下机器人、智能体系、运动控制、通讯导航、探测识别、高效能源 随着人类海洋开发的步伐不断加快,水下机器人技术作为人类探索海洋最重要的手段得到了空前的重视和发展。作者对水下机器人进行了定义与分类。介绍了近年来国内外水下机器人的发展现状与发展趋势,重点针对智能水下机器人的主要关键技术及未来发展方向进行了分析。地球的表面积为5.1亿km2,而海洋的面积为3.6亿km2。占地球表面积71%的海洋是人类赖以生存和发展的四大战略空间——陆、海、空、天中继陆地之后的第二大空间,是能源、生物资源和金属资源的战略性开发基地,不但是目前最现实的,而且是最具发展潜力的空间。作为蓝色国土的海洋密切关系到人类的生存和发展,进入21世纪后,人类更加强烈的感受到陆地资源日趋紧张的压力,这是人类面临的最现实的问题。海洋即将成为人类可持续发展的重要基地,是人类未来的希望。水下机器人从20世纪后半叶诞生起,就伴随着人类认识海洋、开发海洋和保护海洋的进程不断发展。专为在普通潜水技术较难到达的区域和深度执行各种任务而生的水下机器人,将使海洋开发进人一个全新的时代,在人类争相向海洋进军的21世纪,水下机器人技术作为人类探索海洋最重要的手段必将得到空前的重视和发展[1]。 1海洋对人类的重要性
海洋作为蓝色国土,首先是一个沿海国家的“门户”,是其与远方联系的便捷途径,并且“门户”的安全是国家安全的重要组成部分,早在2 500多年前古希腊海洋学家锹未斯托克就提出过“谁控制了海洋,谁就控制了一切”。很久以来人们就依赖于海洋航道进行大量的物品贸易,现在整个世界大部分的货物运输都依赖于海上运输,海洋运输是整个经济正常运转必要的一环。更重要的是,现在很多国家的石油、矿石等最基本的生产资料大部分都依赖于海洋运输,海洋运输的安全和对海洋的控制力成为一个国家生存的基本保障。 近年来再次掀起海洋热的浪潮是因为陆上的资源有限,很多资源已经开发殆尽,而海洋中蕴藏着丰富的能源、矿产资源、生物资源和金属资源等,人们急需开发这些资源以接替所剩不多的陆上资源来维持发展。更为重要的是,地球上半数以上面积的海洋是国际海域,这些区域内全部的资源属于全体人类,不属于任何国家。但目前的现状是只有少数国家有能力对这些资源进行初步开采,这些国家在其已探明的区域拥有优先开采权,相对于那些没有能力开采的国家这几乎就等于独享这部分资源。因此海洋已经成为国际战略竞争的焦点,争夺国际海洋资源是一项造福子孙后代的伟大事业。所以水下技术成为目前重点研究的高新技术之一,智能水下机器人作为高效率的水下工作平台在海洋开发与利用中起到至关重要的作用。 2水下机器人的定义与分类
路径规划算法
[选取日期] NUAA未知环境的动态路径规划 [键入文档副标题] | 刘绍翰
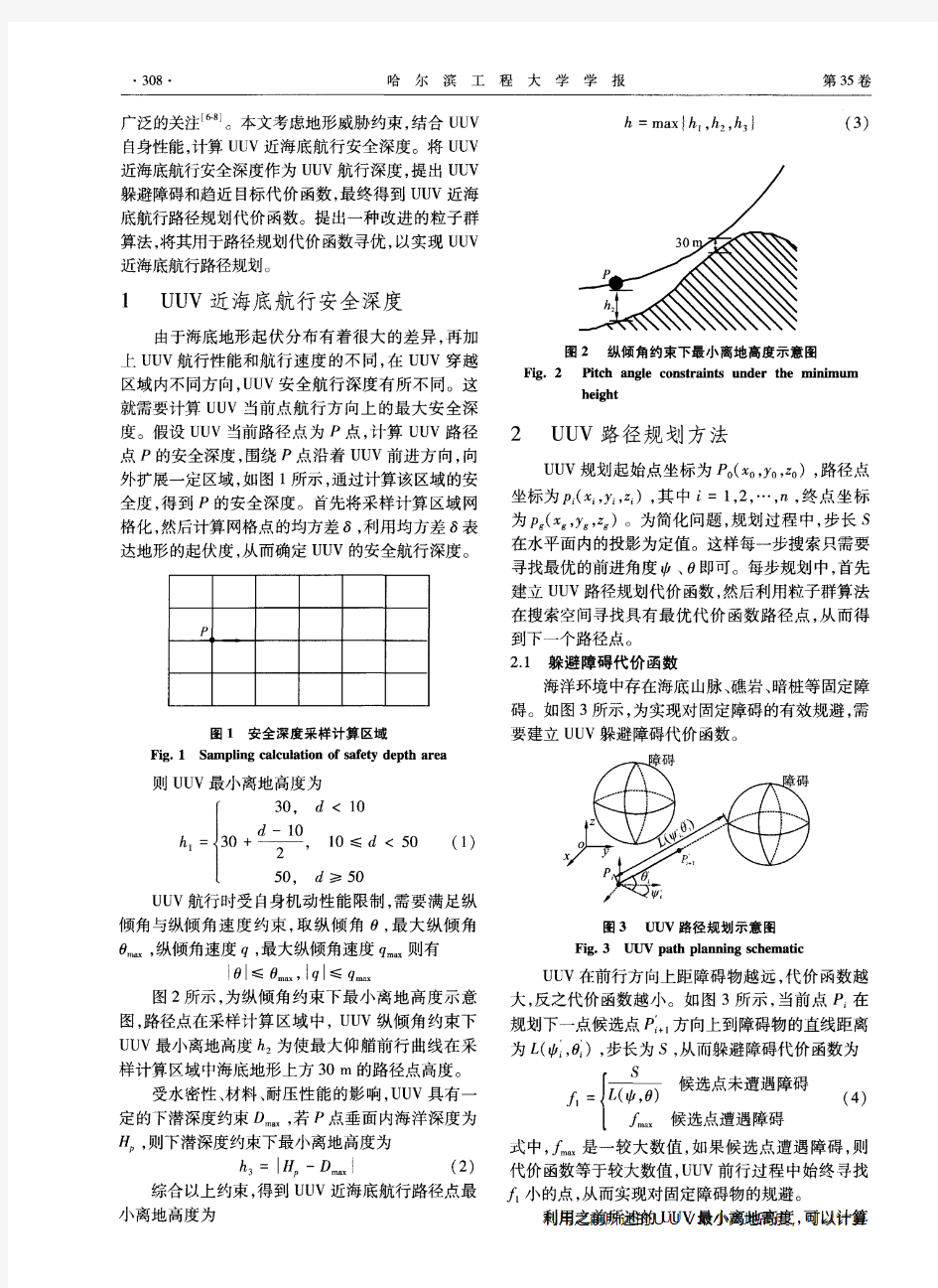
度量距离 灰度化 四连通和8连通。 第一章、静态搜索与A*算法 很多时候,我们需要在一个图中寻找一条从源点到目标节点的最短路径,我们称之为路径规划。搜索算法主要分为,盲目搜索和启发式搜索,它们的一个作用是能够从解空间中需找一条从源点到目标节点的最短路径。启发式搜索是在搜索的过程中,参考一定的指标函数来决定搜索的策略。 迪杰斯特拉算法,类似于广度优先遍历,利用源点到当前节点的代价值作为指标,其一定可以获得从原点到目标节点的最短路,但是其访问的节点数很多。 而最好优先搜索,采用离标节点的距离作为搜索的代价参考值,贪心选择最小的扩展节点,也可以获得最短路径,而且其搜索的节点数目大大减少。 图1 迪杰斯特拉算法图2 最好优先搜索算法当地图中包含障碍物时,迪杰斯特拉算法,仍然可以获得最短路径的路径,最好优先搜索的节点尽管少,但是其不能获得最优解。 图3 迪杰斯特拉算法图4 最好优先搜索算法而A*算法,参考了从原点到当前节点的代价值和当前节点到目标节点启发值,综合了迪杰斯特拉算法和做好优先搜索算法优点,在有障碍物和无障碍物的地图上,可以像迪杰斯特拉算法一样求得最短路径同时,同时能够像最好优先搜索一样减少搜索范围,减少搜索节点的数目。
图5 无障碍物时A*路径规划 图6 有障碍物时A*路径规划算法 经典的迪杰斯特拉算法可以求得最短的路径,而启发式搜索A* 算法,不但可以求得最短路,而且可以使得搜索的范围大大减少,上述算法是传统的静态路径规划算法,其规划的前提条件是已经知地图的结构。A*算法属于离线事先规划,在规划完毕之后,可以沿着最优路径移动,不是在线规划,不能一边规划一边移动。 A*算法的基本理论 A*算法又叫做启发式搜索算法,具有悠久的历史,其启发函数f=g+h 。其中g 表示从原点到当前节点已经付出的代价,好表示从当前节点到目标节点的启发值。 1) A*算法必须满足h(x)<=h*(x),其中h*(x)是实际的启发值,h*(x)在实际中通常是无 法事先得知的,但是这个条件是很容易满足,只要满足该条件,一定能够获得最优解。 2) 如果最短路径长度为C*, 则在算法结束前,open 表中至少有一个节点n, 满足 f(n) <= C*. 这个性质可以这样理解, 因为最短路径存在, 我们不妨设它为: source->a->b->c->...->n->.....->goal. 且在当前时刻,路径中在节点n 前的节点都在closed 表中,即已经扩展了,而节点n 自己在open 表中(注意:算法结束前任意时刻都有这样的节点n 存在)。 则由于该条路劲是最短路径,我们可以知道此时在open 表中的n 的 g(n)值已经是准确值, 即最小值了。而 f(n) = g(n) + h(n) = g*(n) + h(n) <= g*(n) + h*(n) = C* . (最后一个式子取等号是由于n 在最短路径上) 有了这个性质,我们就知道,当A*算法扩展到目标节点时,必有f(goal) = g(goal) <= C* (即 = C*)。否则, 如果f(goal) > C*,由于目标节点是被扩展节点, 则open 表中其他任意其他节点t, 都有f(t) >= f(goal) > C*, 和性质1 矛盾。 3) 扩展新节点时很容易出现重复节点的问题,从上面的伪代码可以看出, 如果新 扩展节点已经存在于closed 表中, 且f 值比表中节点的f 值还要小的话,则除了更新该节点f 值,还需要重新扩展该节点,这简直就是把人从棺材里拖出来。 但是如果h 函数满足相容性,这一步就可以省掉了。所谓相容性就是指对任意节点s1,都满足: h(s1) <= h(s2) + c(s1,s2) (其中c(s1,s2)是指从s1转移到s2的代价)有这个性质我们在不等号两边加上g(s1), 则有 g(s1) + h(s1) <= h(s2) + g(s1) + c(s1,s2)。 如果我们此时扩展s1, 而s2又是能被s1扩展的节点,则由这个式子我们得到 f(s1) <= f'(s2). (若s2之前就已经被扩展出了,则当前的f(s2)可能比f'(s2)小) 这个式子的意义在于由当前节点进行扩展这个方案下得到的节点的f 值总比当前扩展节点的f 值大(子节点总比父节点
人教版高中地理选修二54《海洋空间的开发利用》练习题
5、4 海洋空间的开发利用 一、选择题 从海洋中寻找生存的空间自古就有,目前也是人类利用海洋空间的主要方式之一。结合所学知识回答1~3题. 1.下面四幅图所示的景观属于围海造陆的是() 答案:A 2.海上工厂与陆地工厂相比,所没有的优点是() A。不占陆地面积 B.工厂主体小 C。离加工原料地近 D.建造及管理费用低 答案:D 3。下列物品不.适合在海底储存的是() A.石油B。天然气 C.炸药D。雾凇 答案:D 香港地形以山地丘陵为主,有著名的天然良港,结合图文信息,回答4~5题。 4.香港建港的有利自然条件是() A.地平坡缓 B.岛多浪小 C.滩阔岸直D。河多沙厚 解析:选B.从图文信息中可以看出,香港地形以山地丘陵为主,海岸线曲折,岛屿众多,故选项A、C是错误的.而河多沙厚既不是香港的特点,也不利于建港,故选项D是错误的。岛屿众多可以削弱风浪,利于建港,故选项B是正确的。 5。填海造陆对香港的影响有() A。港区行船更加通畅 B.经济活动远离了海岸 C.海洋生态得以维护 D.利于沿海功能区布局 解析:选D。填海造陆可以增加陆地面积,有利于沿海功能区的布局.值得注意的是,填海造陆会改变海岸线形状,对海洋生态造成不利影响。 6.下列有关人类利用海洋空间资源错误的说法是() A.日本建设海上机场和人工岛是为了缓解日本人多地少的矛盾 B。荷兰很早就用风车排水的方法,人工围海造陆 C.英法海底隧道与日本濑户跨海大桥交通流量都受海洋气候的影响 D。海底储藏大米主要是因为海底温度变化小且温度低 解析:选C。海底隧道的交通流量一般不受海洋气候影响。 随着世界人口的猛增,陆地资源越来越少,陆地空间越来越拥挤,海洋也越来越被人们关注,21世纪将是海洋的世纪。据此回答7~8题。 7.下列叙述属于海洋空间利用同一领域的是()