微波(雷达)感应模块原理以及应用调试
雷达感应开关原理调试
一、原理简介:
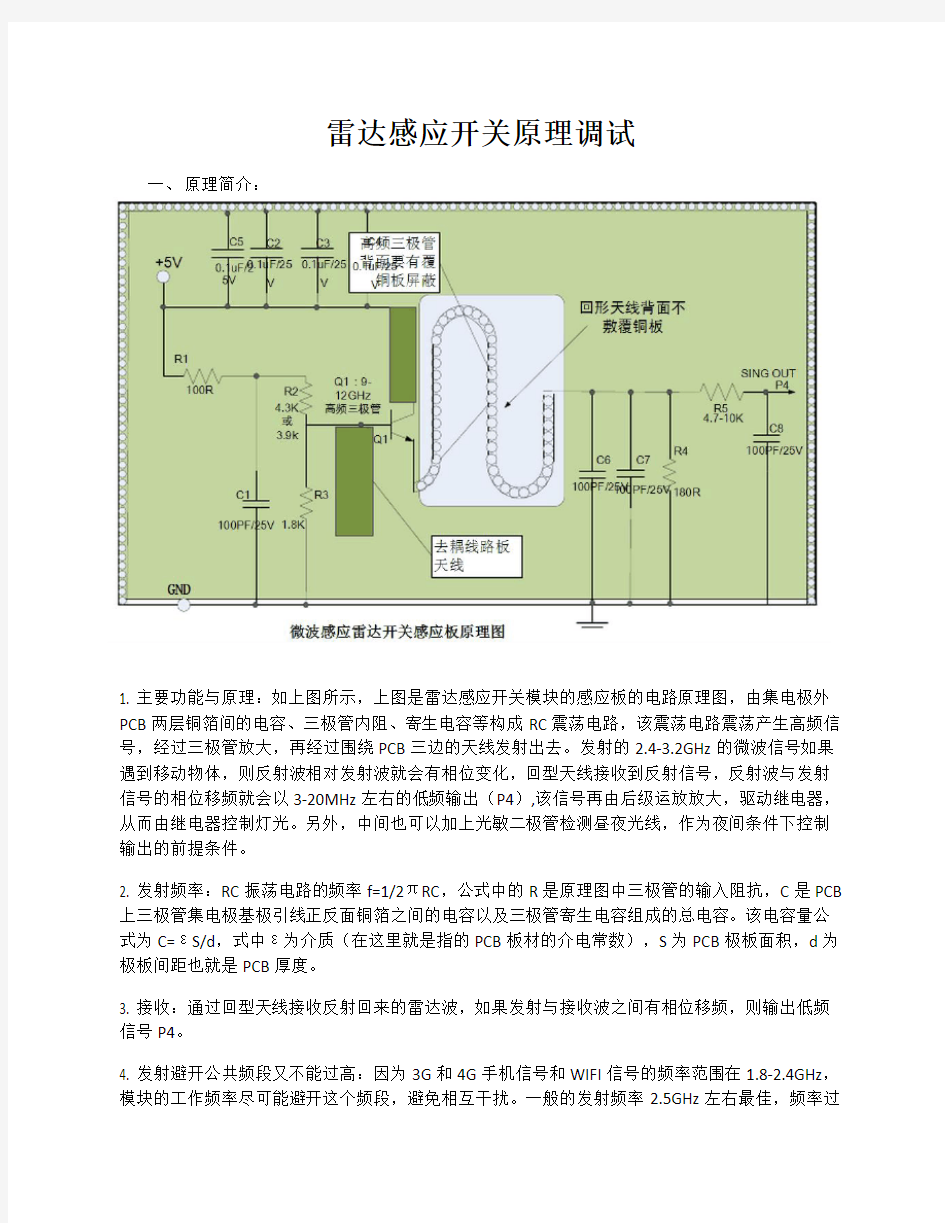
1. 主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。发射的
2.4-
3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。
2. 发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB 上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。
3. 接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号P4。
4. 发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。一般的发射频率2.5GHz左右最佳,频率过
高,则高频三极管增益降低,感应距离近。发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。
5. 发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及
其发射信号幅度。发射信号强度越大,感应距离越远。但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。另外,同一个频率,三极管的特征频率fT越大,其
高频增益就越高,感应距离也就越远,所以,最好设计调整PCB,将频点做到2.4GHz。
6. 接收灵敏度:同样频率,高频三极管对高频信号的fT越大,高频增益越高,接收的移频信号输
出幅度越大,感应灵敏度就越高,感应距离就越远。适当调整后级运放的放大倍数也可以调整感
应距离,但是,如果单纯的提高后级运放的倍数,虽然感应较远距离,但会将小幅度的其它干扰
信号也放大输出,造成误报。
影响感应距离的几个因素:A .发射天线板的尺寸,该尺寸越大,天线越长,则感应距离越远。B .
高频三极管的特征频率越高,其高频增益越大,感应距离也就越远。C.后级运放的放大倍数适当
的高,其对输出的移频信号放大的幅度大。D.发射频率最好在标准规范的2.4GHz。高频三极管的
增益会随着频率的增大而降低降低,频点太高,发射信号功率降低、接收灵敏度也降低。
如果调试得当,使用9GHz的高频三极管的,天线板尺寸在20*30mm左右时,感应距离会在3-5米。天线尺寸在30*40mm左右,感应距离会到8-10米。天线尺寸到40*50mm最远感应距离会
达到20米左右。如果你想在此基础上降低感应距离,可以调整降低后面放大板上的运算放大器的增益,或者改变输入的驱动电平,来满足不同感应距离的要求。
7. 发射天线:围绕天线板3边,用于将本振频率信号发射出去,天线板尺寸越大,该天线越长,
则发射信号越强,发射距离越远,感应距离也就越远,但是,这个发射天线又不能形成四边闭环。天线对电源之间的4个电容主要是对与发射频率相同、从电源串扰进来的其它模块的信号与WIFI
信号屏蔽滤波,如果出现串扰,请调整电容容量或者数量,使得滤波频点同本板发射频率相同。
8. 感应信号放大灯光控制:原理图中,通过P4输出感应信号SING OUT到后面的放大电路,将该
信号通过运放放大,再去控制光源。为了避免被干扰误报,建议在后级放大电路中采用带有运放
功能的CPU,植入信号判断程序,从而将其它非感应信号滤除并加入不同状态的灯光控制,提高
抗干扰能力。
9. 回型天线:发射极外的回型天线接收反射信号,为了使反射信号有效穿过回型天线,回型天线
后面不敷设覆铜板。另外,回型天线只需要一个正弦波形就可以。还可以通过适当加宽回型天线
线宽、加大波形幅度,并且在线上密布过孔来提高感应信号强度和灵敏度(注意:PCB三边和回
型天线上的过孔一定要满镀锡或者镀化学金,以加强发射接收信号的强度)。
10. 基极外去耦合铜箔天线:基极B外那个长方形天线(基极与R3之间的矩形铜箔天线)用作与
其背面的PCB覆铜板形成的电容退耦合。该去耦尺寸太小,则退耦没做好,感应距离很差并不稳定,如果尺寸过大,又会持续输出感应信号,一般24*33mm的天线板的去耦合天线尺寸在
3*8mm,如果天线尺寸大于或者小于24*33mm,则该去耦天线同比例增加或者缩小面积。这个去
耦天线的形状还与感应方向性(水平还是垂直)有关系,设计成长条形状,则是垂直于PCB板的
感应距离近,水平于PCB方向的感应距离远。如果想水平与垂直的感应距离相等,则可以设计成
方形的,但是面积不要变。
11. 发射极引出的线条要适当宽长一些,这个线条以及基极外去耦合铜箔与背面铜箔之间的电容,是发射振荡电路的电容,电容大小调整,也会调整发射频点。
12. 高频三极管:最好采用特征频率f T为9GHz以上的高频三极管,f T越高,其在高频微波频段
的高频增益就越高,具体到使用中,f T越高,其发射信号幅度就越强、接收感应微弱微波信号越
灵敏,感应的距离就越远BFS520-SOT323-N2t与PRF947-SOT323-7N是9GHz的高频三极管,
BFR370F、BFR360F、BFG340F是f T为12GHz的高频三极管。另外,尽可能的采用SOT323封装的
芯片。因为SOT323同SOT23相比较,SOT323封装的芯片固定在引线框架的背面(见右图),可
以屏蔽正面过来的干扰波。并且,在PCB布线时,在高频三极管的背面要敷设覆铜板,挡住背面
进来的反射波,提高三极管的抗干扰能力。
13. 下雨受潮报警:该产品发射的是厘米波,波长较短,任何微波雷达在下雨时都容易被雨折射反射,所以,下雨时,检测信号有可能有输出。另外,PCB受潮也会造成板材的介电常数变化,板
间电容变化,发射频点变化,因而PCB正反面要涂油防潮。
14. PCB板材:最好采用高频板材的介电常数适当稳定的普通板材(高频板材成本价格太高),开
始做实验投板时,最好多选用厚度1.2mm、1.0mm的板材,从而可能得到不同分布电容的PCB,
也会得到不同的发射频率和感应距离,最终从中选用最佳的。另外,PCB板材要用品质因数高,
并且一定要稳定(否则频率漂移并逐渐感应距离近)。
二、调试建议:
1. 发射频率过低(低于
2.4GHz以下的话,抗干扰能力就差,反射能力差,感应距离会时远时近,产生误报。请调节发射信号震荡电路集电极与基极外铜箔面积和接收信号电路或者PCB的板材厚度,改变发射频率。(用3GHz以上的频谱仪可以直观的测试发射接收信号的频谱与幅度)。
2. 感应距离近:发射天线太短、线宽太窄、过孔没有金属化,接收天线尺寸小,其相应的发射信号强度和接收灵敏度就低,感应距离就近。
3. 振荡电路中的阻容器件的均匀性、一致性、温度稳定性要好一些,建议使用优质温飘小的精密电阻、电容。
4. 一点也不感应:A.可能是你的振荡电路没有起振,调整发射频率震荡电路,满足起振条件。B.可能是高频三极管的f T太低,对高频信号的放大增益太小,至少要使用f T大于9GHz的高频三极管。C.天线板尺寸太小,天线太短,发射信号太弱。D.三极管的偏置电路有问题,进入截止区或者饱和区。
5. 相互串扰:直流的电源对微波波段的滤波不好,造成其它信号源以及间隔近的模块之间的微波信号通过电源串进来,产生周围杂波的干扰,会误感应而持续亮灯、感应距离近。不要用整流二极管简单整流供电,而要采用电源稳压器芯片稳压后供电,并且要调整四个滤波电容对外来同本板发射频点相同的高频信号滤波。
6. 后级运放放大:大家大多使用的之前红外声光控开关上的运放BISS0001。
最好使用带有运放的单片机,并在单片机里面植入对感应信号判断的程序,
这样,就会判断去除串扰杂波信号和非感应信号,还能通过感应信号幅度变化来判断人体与汽车是由远及近再由近到远,还是由远及近到灯下不走,这样可以更人性化的延时控制灯光。
7. 3.3V供电:使用3.3V供电,就要将高频三极管的偏置做调整,提高基极与集电极的偏置压降,以尽可能提高高频三极管的工作点,避免因为电压降低而造成的发射功率降低。
大家使用的原理图都一样,做出来的产品的感应距离却不同,原因就是:PCB的布线产生的分布参数、元器件板材的采用、电源滤波、PCB尺寸、厚度等因素对产品的影响非常大。
五、设计经验总结
1、天线长度
理论和实践证明,当天线的长度为无线电波长的1/4时,无线的发射和接收转换效率最高。因此,天线的长度将根据所发射和接收的频率即波长来决定。只要知道对应发射和接收的中心频率就可以用下面的公式算出对应的无线电信号的波长,再将算出的波长除以4就是对应的最佳天线长度。
频率余波长的换算公式为:波长=300000000/频率
2、PCB注意事项
天线版背面不能铺铜
天线中增加过孔增加阻抗
注意器件布局,应当原理高频三极管和天线。
3、距离调节电阻选择
距离调节电阻即为放大倍数的调节,该电阻的大小应该根据你天线实际输出信号大小而定,需要经过大量测试来判定你天线板信号的大小好坏,一般正常的信号在0.5v左右(天线长短粗细决定其质量)。
G雷达微波感应模块
Typical Application Circuit (LED 感应等) Feature ? 供电电压 5.5V to 15V ? 微波发射及接收频率:5.8G ? 感应距离可调,最高到10米 ? 360度全向检测 ? 延时时间可调,默认38秒 ? 封锁时间:2秒 ? 连续触发工作模式 ? 无相互干扰 Applications ? 感应灯 ? 自动门 ? 自动录像系统 Description AM5805微波感应模块是利用多普勒雷达(Doppler Radar)原理设计的微波移动物体 探测器,微波频率 5.8GHz+-75MHz ,直接输入直流电压即可工作,同时输出逻辑高低电平。 本模块包含两个部分:感应模块和处理模块。感应模块检测物体的移动,产生微弱的IF 信号;处理模块接收到IF 信号后,进行滤波放大处理后,输出逻辑电平。 AM5805主要应用于 LED 节能照明、自动 门控制开关、工业自动化控制,室内外安全防范系统、ATM 自动提款机的自动录像控制系统、 野外安全警世等场所。 AM5805微波感应模块属于非接触探测型模块,抗射频干 扰能力强,不受温度,湿 度,光线,气流,尘埃影响,可以安装在一定厚度的塑料,玻璃,木制等非金属的外壳里面, 方便应用到各种产品或设备控制上面 AC220V
感应模块 处理模块 Electrical Characteristics (@T A = +25°C, unless otherwise specified.) Outline Dimension 感应模块外观尺寸图 (mm ) 18 25 2012 1 2.5
雷达生命探测仪
生命探测仪 之雷达生命探测仪原理及其应用 生命探测仪是借着感应人体所发出超低频电波产生之电场(由心脏产生)来 找到"活人"的位置。配备特殊电波过滤器可将其它动物,诸如狗、猫、牛、马、猪等不同于人类的频率加以过滤去除,使生命探测仪只会感应到人类所发出的频率产生之电场。仪器配备两种不同侦测杆,长距离侦测杆侦测距离可达500公尺,短距离20公尺。人体发出的超低频电场可穿过钢筋混凝墙、钢板。仪器在碰到上述障碍物时,侦测距离会减少,但只要操作者向前靠近侦测地点,仍可精准地找到欲搜寻的人体目标。 一、生命探测仪的种类: 目前所知的生命探测仪按原理结构可分为:雷达波探测器、视频探测器、音频探测器等。 1.音频探测器: ①.声波音频探测器 原理:通过获取在空气中传播的微弱声波并放大信号来探测目标。 ②.震动波音频探测器 原理:通过震动探头拾取并放大地面传来的震动波来探测目标 两者的共同特点就是:价格较低,比较简单易用。 局限性:现场需要有一定的孔洞和裂隙才能伸入探测设备;或只适用于浅表层、大空间的探测;在下雨或有消防用水的情况下会受到一定的环境干扰。 2.视频探测器 原理:利用可见光或非可见光,通过CCD传感器摄像转送到显示屏成像。 有视频形象化,直观简单、易用、价廉 一般在使用中需要线缆传输音频信号,或缝隙孔洞。 3.雷达波生命探测仪 原理:由雷达天线定向集中地发射电磁波,该电磁波能穿透混凝土墙壁、碎石瓦砾等,与人体接触后反射并产生变化。由于这种变化受人的身体活动、呼吸甚至心跳活动的影响,反射后变化了的电磁波被接收器接收,经过过滤背景干扰,某些特有的波谱经计算机软件分析处理,在显示屏显示。 特点:具有易携带、移动快、无需与物体接触的特点,无需由孔洞、裂隙等进入,可在被各种物质隔离覆盖的情况下探测到被困者。 二、雷达生命探测仪具体原理: 无线探测发射器首先发射雷达波,雷达波可穿透普通的建筑墙体和碎石等材料,到达最远6米的被测目标。目标物的移动或呼吸心跳等使雷达波产生一定的改变,并把变化后的雷达波通过天线发送回掌上电脑上。经过电脑内专业软件的数据处理,得出相应的波形图及信号显示,从而判断被测范围内是否有幸存人员。 在操作该探测雷达时,要确保掌上电脑与无线探测发射器之间的距离在 1.5-15米范围内,并保证在距探测器天线6.1米的范围内没有其他可疑的移动。该设备通常能够在3分钟之内在有效空间范围内完成搜寻,并进一步定位被困人员。
微波感应人体传感器的典型应用电路
微波感应人体传感器的典型应用电路 这里介绍的微波感应控制器和市场上常见的简易型微波感应控制器相比较,因为采用专用的微处理集成电路HT7610A,不但检测灵敏度度高,探测范围宽,而且工作非常可靠,误报率极低,能在-25~+45度的温度范围内稳定工作,最适和在中、高档防盗报警系统中作人体移动检测传感头使用。 1.工作原理 微波感应控制器使用直径9厘米的微型环形天线作微波探测,其天线在轴线方向产生一个椭圆形半径为0~5米(可调)空间微波戒备区,当人体活动时其反射的回波和微波感应控制器发出的原微波场(或频率)相干涉而发生变化,这一变化量经HT7610A进行检测、放大、整形、多重比较以及延时处理后由白色导线输出电压控制信号。 高可靠微波感应控制器内部由环形天线和微波三极管组成一个工作频率为2.4GHz的微波振荡器,环形天线既做发射天线也可接收由人体移动而反射的回波。内部微波三极管的半导体PN结混频后差拍检出微弱的频移信号(即检测到人体的移动信号),微波专用微处理器HT7610A首先去除幅度太小的干扰信号只将一定强度的探测频移信号转化成宽度不同的等幅脉冲,电路只识别脉冲足够宽的单体信号,如人体、车辆其鉴别电路才被触发,或者两秒内有2~3个窄脉冲,如防范边沿区人走动2~3步,鉴宽电路也被触发,启动延时控制电路工作。如果是较弱的干扰信号,如小体积的动物,远距离的树木晃动、高频通讯信号、远距离的闪电和家用电器开关时产生的干扰予以排除。最后输HT7610A鉴别出真正大物体移动信号时,控制电路被触发,输出2秒左右的高电平,并有LED2同步显示,输出方式为电压方式,有输出时为高电平(8伏以上),没有输出时为低电平。 微波专用的微处理器HT7610A的时钟频率为16KH,当初次加电时,系统将闭锁60秒,期间完成微处理器的初始化并建立电场,这时LED闪亮60秒后熄灭,系统自动进入检测状态,当检测到有效信号时,将有2秒信号输出,并由指示灯LED同步点亮。 高可靠微波感应人体传感器TX982模块 控制器的外形上图所示,侧面蓝色的是灵敏度调整孔,可以使监控距离在1~7米范围内可调,顺时针转动距离变远,逆时针转动距离变近,红色的是LED指示灯用于指示TX982的工作状态,1.2米长的双芯屏蔽线用于连接电源和负载,其中红色线用来接正电源,蓝色线输出,铜网屏蔽层黑线接电源负极,必要时可以用类似电缆加长至50米以内使用。 高可靠微波感应控制器电源电压为12~16V的整流变换器供电,静态耗电量在5MA左右。输出形式为电压方式,有输出时为高电平(8V以上),静态时为低电平,使用请参考下图:
微波(雷达)感应模块原理调试 (2)
雷达感应开关原理调试 一、原理简介: 1. 主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。发射的 2.4- 3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。 2. 发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB 上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。 3. 接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号P4。 4. 发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。一般的发射频率2.5GHz左右最佳,频率过
高,则高频三极管增益降低,感应距离近。发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。 5. 发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及 其发射信号幅度。发射信号强度越大,感应距离越远。但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。另外,同一个频率,三极管的特征频率fT越大,其 高频增益就越高,感应距离也就越远,所以,最好设计调整PCB,将频点做到2.4GHz。 6. 接收灵敏度:同样频率,高频三极管对高频信号的fT越大,高频增益越高,接收的移频信号输 出幅度越大,感应灵敏度就越高,感应距离就越远。适当调整后级运放的放大倍数也可以调整感 应距离,但是,如果单纯的提高后级运放的倍数,虽然感应较远距离,但会将小幅度的其它干扰 信号也放大输出,造成误报。 影响感应距离的几个因素:A .发射天线板的尺寸,该尺寸越大,天线越长,则感应距离越远。B . 高频三极管的特征频率越高,其高频增益越大,感应距离也就越远。C.后级运放的放大倍数适当 的高,其对输出的移频信号放大的幅度大。D.发射频率最好在标准规范的2.4GHz。高频三极管的 增益会随着频率的增大而降低降低,频点太高,发射信号功率降低、接收灵敏度也降低。 如果调试得当,使用9GHz的高频三极管的,天线板尺寸在20*30mm左右时,感应距离会在3-5米。天线尺寸在30*40mm左右,感应距离会到8-10米。天线尺寸到40*50mm最远感应距离会 达到20米左右。如果你想在此基础上降低感应距离,可以调整降低后面放大板上的运算放大器的增益,或者改变输入的驱动电平,来满足不同感应距离的要求。 7. 发射天线:围绕天线板3边,用于将本振频率信号发射出去,天线板尺寸越大,该天线越长, 则发射信号越强,发射距离越远,感应距离也就越远,但是,这个发射天线又不能形成四边闭环。天线对电源之间的4个电容主要是对与发射频率相同、从电源串扰进来的其它模块的信号与WIFI 信号屏蔽滤波,如果出现串扰,请调整电容容量或者数量,使得滤波频点同本板发射频率相同。 8. 感应信号放大灯光控制:原理图中,通过P4输出感应信号SING OUT到后面的放大电路,将该 信号通过运放放大,再去控制光源。为了避免被干扰误报,建议在后级放大电路中采用带有运放 功能的CPU,植入信号判断程序,从而将其它非感应信号滤除并加入不同状态的灯光控制,提高 抗干扰能力。 9. 回型天线:发射极外的回型天线接收反射信号,为了使反射信号有效穿过回型天线,回型天线 后面不敷设覆铜板。另外,回型天线只需要一个正弦波形就可以。还可以通过适当加宽回型天线 线宽、加大波形幅度,并且在线上密布过孔来提高感应信号强度和灵敏度(注意:PCB三边和回 型天线上的过孔一定要满镀锡或者镀化学金,以加强发射接收信号的强度)。 10. 基极外去耦合铜箔天线:基极B外那个长方形天线(基极与R3之间的矩形铜箔天线)用作与 其背面的PCB覆铜板形成的电容退耦合。该去耦尺寸太小,则退耦没做好,感应距离很差并不稳定,如果尺寸过大,又会持续输出感应信号,一般24*33mm的天线板的去耦合天线尺寸在 3*8mm,如果天线尺寸大于或者小于24*33mm,则该去耦天线同比例增加或者缩小面积。这个去
生命探测仪
四川汶川地震救灾中使用的声波生命探测仪是利用声波传递____生命信息__的一种救援方式声波生命探测仪寻找生命靠的是识别被困者发出的声音。人类有两只耳朵,这种仪器却有3至6个耳朵。它的耳朵叫做“拾振器”, 也叫振动传感器。它能根据各个耳朵听到声音先后的微小差异来判断幸存者的具体位置。如果幸存者已经不能说话,只要用手指轻 轻敲击,发出微小的声响,也能够被它听到。即便被埋压人困在一块相当严实的大面积水泥楼板下,只要心脏还有微弱的颤动, 探测仪也能感觉出来,于是救援队员可以确定废墟下是否有人活着。 生命探测仪的种类 根据不同的原理分为光学生命探测仪、热红外生命探测仪和声波生命探测仪。 生命探测仪是借着感应人体所发出超低频电波产生之电场(由心脏产生)来找到"活人"的位置。配备特殊电波过滤器可将其它动物 ,诸如狗、猫、牛、马、猪等不同于人类的频率加以过滤去除,使生命探测仪只会感应到人类所发出的频率产生之电场。仪器配备 两种不同侦测杆,长距离侦测杆侦测距离可达500公尺,短距离20公尺。人体发出的超低频电场可穿过钢筋混凝墙、钢板。仪器在 碰到上述障碍物时,侦测距离会减少,但只要操作者向前靠近侦测地点,仍可精准地找到欲搜寻的人体目标。 本仪器目标锁定功能在侦测到人体发出超低频产生之电场后,侦测杆会自动锁定此电场,人体移动时,侦测杆也会跟着移动。 另配备镭射光点,提供操作者寻找侦测杆方向。 生命探测仪是借着感应人体所发出超低频电波产生之电场(由心脏产生)来找到“活人”的位置。配备特殊电波过滤器可将其它动 物,诸如狗、猫、牛、马、猪等不同于人类的频率加以过滤去除,使生命探测仪只会感应到人类所发出的频率产生之电场。仪器配 备两种不同侦测杆,长距离侦测杆侦测距离可达500公尺,短距离20公尺。人体发出的超低频电场可穿过钢筋混凝墙、钢板。仪器 在碰到上述障碍物时,侦测距离会减少,但只要操作者向前靠近侦测地点,仍可精准地找到欲搜寻的人体目标。 目前所知的生命探测仪按原理结构可分为:雷达波探测器、视频探测器、音频探测器等,分别对比如下: 一、音频探测器: 1.声波音频探测器 原理:通过获取在空气中传播的微弱声波并放大信号来探测目标 2.震动波音频探测器
人体微波感应传感器工作原理
人体微波感应传感器工作原理 1。工作原理 微波感应控制器使用直径9厘米的微型环形天线作微波探测,其天线在轴线方向产生一个椭圆形半径为0~5米(可调)空间微波戒备区,当人体活动时其反射的回波和微波感应控制器发出的原微波场(或频率)相干涉而发生变化,这一变化量经HT7610A进行检测、放大、整形、多重比较以及延时处理后由白色导线输出电压控制信号。 高可靠微波感应控制器内部由环形天线和微波三极管组成一个工作频率为2.4GHz的微波振荡器,环形天线既做发射天线也可接收由人体移动而反射的回波。内部微波三极管的半导体PN结混频后差拍检出微弱的频移信号(即检测到人体的移动信号) ,微波专用微处理器HT7610A首先去除幅度太小的干扰信号只将一定强度的探测频移信号转化成宽度不同的等幅脉冲,电路只识别脉冲足够宽的单体信号,如人体、车辆其鉴别电路才被触发,或者两秒内有2~3个窄脉冲,如防范边沿区人走动2~3步,鉴宽电路也被触发,启动延时控制电路工作。如果是较弱的干扰信号,如小体积的动物,远距离的树木晃动、高频通讯信号、远距离的闪电和家用电器开关时产生的干扰予以排除。最后输HT7610A鉴别出真正大物体移动信号时,控制电路被触发,输出2秒左右的高电平,并有LED2 同步显示,输出方式为电压方式,有输出时为高电平(4伏以上),没有输出时为低电平。 微波专用的微处理器HT7610A的时钟频率为16KH,当初次加电时,系统将闭锁60秒,期间完成微处理器的初始化并建立电场,这时LED1点亮60秒后熄灭,系统自动进入检测状态,当检测到有效信号时,将有5秒信号输出,并由指示灯LED2同步显示。 控制器的外形上图所示,面板上设置有灵敏度调整孔,可以使监控距离在1~7米范围内可调,顺时针转动距离变远,逆时针转动距离变近, LED1、LED2用于指示TX982的工作状态,1.2米长的双芯屏蔽线用于连接电源和负载,其中红色线用来接正电源,白色线接输出,铜网屏蔽层接电源负极,必要时可以用类似电缆加长至50米以内使用。 高可靠微波感应控制器电源电压为12~16V的整流变换器供电,静态耗电量在5MA左右。 输出形式为电压方式,有输出时为高电平(4V以上),静态时为低电平,使用请参考下图
雷达生命探测仪 型号
雷达生命探测 雷达生命探测仪型号:FGMOD27003+ FGMOD雷达生命探测仪是美国超视安全系统公司于2005年新近推出的一种安全救生系统。著名地球物理学家,麻省理工学院博士大卫席思(David Cist)创造性地将雷达超宽频技术(UWB)应用于安全救生领域,从而为该领域带来一项革命性的新技术。基于这种新技术的安全救生系统----FGMOD雷达生命探测仪,成功地解决了多项困扰传统安全救生系统的问题,使搜救工作比以往更迅速,更精确,也更安全,是现在世界上最先进的生命探测系统。该系统的天线是美国航空航天局(NASA)指定的火星探测器两种候选雷达天线之一,是世界上最先进的探地雷达天线,能够非常敏锐地捕捉到非常微弱的运动。该产品已获得美国专利。超视安全系统公司近日内在中美日三国同步推出这个系统。 二、FGMOD雷达生命探测仪的组成 超视安全系统公司的FGMOD雷达生命探测仪移动探测系统是一个由以下主要部件组成的传感器: 一个发送超宽频信号的发送器 一个侦测接收返回信号的接收器 一台用于读入接收器的信号并进行算法处理的电脑 传感器包含了可编程的固件。传感器产生的信号通过无线传输传送给掌上电脑(PDA控制器)进行显示。传感器和控制器有各自相互独立的电源。
无线探测发射器发射器 掌上操作接收显示器 三、技术数据 无线探测发射器 尺寸:44×44×24 cm 重量:9.5 kg(包括电池) 电池:10.8V锂电池,可连续工作长达4h 废墟瓦砾中探测距离:4.6米内的呼吸活动以及6米内的移动 废墟瓦砾中探测范围:36 m2 探测角度:120°角 符合美国联邦通信委员会(FCC)认证 工作频率:270 MHz 脉冲频率范围:100-700 MHz 掌上操作显示器 PDA掌上电脑,方便携带 专业探测软件集成了上千种人体呼吸心跳模式,使探测结果更精确 当探测到幸存者时,能显示其与探测器间的距离 可对现场探测过程做数据记录 可兼容GPS全球卫星定位系统 USB接口可与电脑连接传递数据 操作系统:MS Windows Mobile 2003 for Pocket PC 四、FGMOD雷达生命探测仪的工作原理 FGMOD雷达生命探测仪实际上是一个呼吸和运动探测器。雷达信号发送器连续发射电磁信号,对一定空间进行扫描.,接收器不断接收反射信号并对返回信号进行算法处理。如果被探测者保持静止,返回信号是相同的。如果目标在动,则信号有差异。通过对不同时间段接受的信号进行比较等算法处理,就可以判断目标是否在动。 FGMOD雷达生命探测仪是通过测试被探测者的呼吸运动或者移动来工作的。由于呼吸的频率较低,一般每秒1到2次,就可以把呼吸运动和其他较高频率的运动区分开来。测移动的原理也大致是这样。超视安全系统公司的天线是美国航空航天局(NASA)指定的两种火星探测器地质雷达天线之一,能够非常敏锐地捕捉到非常微弱的运动,加上功能强大的算法处理,是安全救生部门最好的帮手。 五、FGMOD雷达生命探测仪有别于传统安全救生系统技术优势 超视安全系统公司的FGMOD雷达生命探测仪旨在解决当前市场上现存救生系统的根本缺点。当前的救生系统除了无法穿透障碍物侦测移动外,大部分的系统,例如摄像系统,侦测的范围非常有限并且只有在移动的遇险者进入摄像机镜头或传感器的视野后才能报警。基于音频的侦测系统大大受限于距离,障碍物,残垣以及遇险者是否还强壮和清醒到能够发出声音。 超视安全系统公司的FGMOD雷达生命探测仪可以在30秒内侦测出一定范围内遇险者的移动和呼吸,可以穿透障碍物(例如钢筋混凝土砖墙,柏油层,泥石流和雪崩造成的积雪)进行侦测,不受声音和背景噪音的影响。超视安全系统公司的传感器可以发出包含目标指定信息
微波感应模块规格说明书
新型红外雷达感应模块(电源) 产品概述:新型红外雷达感应模块(电源)是利用PIR 热释电与多普勒效应相结合原理设计而成的人体移动信号侦测器,它以非接触方式扫描人体PIR热释电信号的位置是否发生移动,继而产生相应的开关操作。该产品具有抗射频干扰能力强、不怕风吹草动、树叶摇曳、电风扇转动、空调冷热气体流动、浴室浴霸温度骤变......不受温度、湿度、强光、噪音、气流、尘埃等外界因数影响,能透过一定厚度的塑胶、玻璃、木制品等金属以外的物体,而对其侦测能力没有影响,能够非常方便的应用到设备控制、环境辅助光源控制、地下停车场、仓库、通道、走廊、洗手间等室内外的照明及防盗报警、视频监控、自动化设备控制等各种领域。 功能特点:新型红外雷达感应模块(电源)采用发射、接收为一体的平面天线和PIR热释电红外解码系统BISS0001形成的红外雷达移动波侦测新技术,通过多普勒扫描,侦测人体、车辆的动态信号,对灯具、报警装置等进行有效控制。产品独创抗干扰新技术,相互不干扰,安装不必考虑间接距离问题!可以安装在天花板或灯具内部,而侦测能力不会受到影响,更简洁、更美观、更隐蔽、更神秘、更安全!
模块类型 1、交流型:A C95-250V宽电压,适应各种不同地区电网电压。可控硅控制A C输出,无触点、无噪音、无污染、寿命长。具有自动测光管理功能(出厂未安装光敏电阻),实现白天(光线充足)呈关闭状态,晚上(光线不足)人来灯亮、人走灯灭。可做吸顶灯、日光灯及各种灯具、电器等的自动控制。 交流模块技术参数 ?工作电压:A C110V-250V(50-60H z) ?负载功率:阻性负载150W(节能灯、L E D灯80W) ?输出方式:可控硅控制、A C交流输出 ?自身功耗:静态功耗≤1m W ?感应范围:10-15米 ?感应角度:墙壁安装180°、吸顶安装360° ?触发方式:雷达扫描、人体感应、重复触发 ?延时时间:30秒钟(可定做各种延时时间) ?模块尺寸:36m m*23m m*23m m ?环境温度:-30℃-70℃
hawk导波雷达物位计产品说明书[2]
导波雷达物位计 使用手册 重庆霍克川仪仪表有限公司
目录 测量原理 (3) 产品介绍 (4) 安装指南 (5) 仪表调试 (10) 接线方式 (21) 技术参数 (21) 产品选型 (22)
MPS2000系列导波雷达物位计 测量原理 导波雷达是基于TDR(时间行程)原理的测量仪表。 探头发出高频脉冲并沿缆绳传播,当脉冲遇到物料表面 时反射回来被仪表内接收器接收。通过独特的等效采样 技术,将记录脉冲发射到接收之间的时间差,最终转化 为仪表到料位之间的距离。并将距离信号转化为物位信 号。 输入 反射的脉冲信号沿缆绳传导至仪表电子线路部分,微处理器对此信号进行处理,识别出 微波脉冲在物料表面所产生的回波。正确的回波信号识别由智能软件完成,距离物料表面的距离D与脉冲的时间行程T成正比: D=C×T/2 其中C为光速 因空罐的距离E已知,则物位L为: L=E-D 输出 通过输入空罐高度(零点),满罐高度(满量程)及一些现场工况和应用参数来来使得仪表自动使用现场的测量环境,对应料位的比例输出4~20mA电流信号以及HART仪表总线上的数据。
产品介绍
安装指南 下述的安装指南适用于缆式和杆式探头测量固体颗粒料和 液体物体。同轴管式探头只适用于液体物体。 安装位置: 尽量远离出料口和进料口。 对金属罐和塑料罐,在整个量程范围内不碰壁。如果是金属罐, 物位仪表不要安装在罐的中央。 建议安装在料仓直径的1/4处。 缆式探头或杆式探头离罐壁最小距离不小于30厘米。 探头底部距罐底大约30mm。 探头距罐内障碍物最小距离不小于200mm。 如果容器底部是锥型的,传感器可以安装 罐顶中央,这样可以一直测量到罐底。 测量范围 说明: H----测量范围 L----空罐距离 B----顶部盲区 E----探头到罐壁的最小距离 顶部盲区是指物料最高料面与测量参考点之间的最小距离。 底部盲区是指缆绳最底部附近无法精确测量的一段距离。 顶部盲区和底部盲区之间是有效测量距离。 注意: 只有物料处于顶部盲区和底部盲区之间时,才能保证罐内物位的可靠测量。
生命探测仪原理简介
生命探测仪原理简介 我们大家都不会忘记2008年5月12日14时28分在四川汶川发生的8.0 级大地震,这次地震给人民生命财产造成了极大的损失,数万同胞永远离我们而去!地震发生后,各级党委政府广大干部群众迅速投入到救援行动中,中央第一时间成立了国务院抗震救灾总指挥部,举全国之力抗震救灾。在救援行动中,专业救援人员用到了一种叫做“生命探测仪”的设备,它帮助救援人员更准确快速的找到被困人员实施求助。 生命探测仪是基于穿墙生命探测(Though-the-Wall Surveillance,简称T WS)技术的发展应运而生的。TWS是研究障碍物后有无生命现象的一种探测技术,可采用无源探测和有源探测两种方法。无源探测主要是根据人体辐射能量与背景能量的差异,或者人体发出的声波或震动波等进行被动式探测,如红外生命探测仪、音频生命探测仪;有源探测则主动发射电磁波,根据人的呼吸、心跳等生理特点,从反射回来的电磁波中探测是否存在生命,如雷达生命探测仪。 红外生命探测仪 任何物体只要温度在绝对零度以上都会产生红外辐射,人体也是天然的红外辐射源。但人体的红外辐射特性与周围环境的红外辐射特性不同,红外生命探测仪就是利用它们之间的差别,以成像的方式把要搜索的目标与背景分开。人体的红外辐射能量较集中的中心波长为9.4μm,人体皮肤的红外辐射范围为3~50μm,其中8~14μm占全部人体辐射能量的46%,这个波长是设计人体红外探测仪的重要的技术参数[3]。 红外生命探测仪能经受救援现场的恶劣条件,可在震后的浓烟、大火和黑暗的环境中搜寻生命。红外生命探测仪探测出遇难者身体的热量,光学系统将接收到的人体热辐射能量聚焦在红外传感器上后转变成电信号,处理后经监视器显示红外热像图,从而帮助救援人员确定遇难者的位置。 红外探测设备最早应用于军事,并随着科学技术的发展而不断改进。1988年瑞典AGA公司推出的全功能热像仪能将温度的测量、修改、分析及图像采集、储存合于一体,并利用这一技术研制出便携式全功能热像仪,主要用于军事侦查。随着社会的发展,各国都开始重视研制用于减少各种灾害造成的人员伤亡的技术设备,红外探测技术也由军用转变为救援仪器——红外生命探测仪.
生命探测仪—研究现状
这次大汶川地震中数百万房屋被震塌,十几万人被压埋在倒塌的房屋下面,尽快抢救被压埋的幸存者成为开始救灾的第一位紧急任务,但是由于房屋倒塌现场的各种复杂情况,许多被深埋的幸存者无法主动把呼救信息传递上来,在这种地震灾害中就急需一种被称为生命探测仪的信息检测技术。 生命探测技术是近代发展的一项新技术,主要用于废墟中发现存活者及寻找清理战场时的伤员。传统的方法一般应用光学、红外线、无线电、卫星定位技术、声波等技术进行探测。红外生命探测技术利用了人体的红外辐射特性,人体的红外辐射能量较集中的中心波长为9.4μm,人体皮肤的红外辐射范围为3~50μm,其中8~14μm占全部人体辐射能量的46%,这个波长是设计人体红外探测仪的重要的技术参数,决定了人体与周围环境的红外辐射特性不同与差别,探测仪可以用成像的方式把要搜索的目标与背景分开。声波振动生命探测仪应用了声波及震动波的原理,采用声音/振动传感器,进行全方位的振动信息收集,可探测以空气为载体的各种声波和以其它媒体为载体的振动,并将非目标的噪音波和其它背景干扰波过滤,进而确定被困者的位置。但这些技术都有各自的局限性,无法有效地探测到埋藏在废墟、瓦砾或建筑物下的人员。 随着无线电技术的迅猛发展,根据HAETC(Hughes Advanced Electro-magnetic Technology Center)对电磁波在多种介质中的穿透特性的测量研究可知:在低频段,在l~10GHz范围的电磁波在穿过混凝墙壁时衰减很小,并且随着频率的降低,衰减也在减少,其中在8GHz时衰减大约为l0dB,在2GHz 时衰减将下降到5dB以下【1】。因此,低于10G 的频率适合对砖块和混凝土构筑的墙壁进行穿透探测。所以微波多普勒雷达被用于探测几米厚的墙体后探测数十米距离幸存者的呼吸、心跳和体动等生命体征信息。多普勒探测雷达发射电磁波探测信号,遇墙壁、废墟等穿透性较好,遇生命体后反射并由接收机接受解调,得到呼吸、心跳和体动等生命体征信息【2】。根据多普勒原理,运动物体对反射信号后,会对反射信号的频率、相位造成影响,其影响主要决定于物体的运动速度。将人体的胸腔、心脏看作目标物体,则它们的振动变化会对反射信号造成有规律的变化,接收机解调反射信号后就可以得到呼吸、心跳等生命体征信息。 目前,微波生命探测雷达主要有两种,连续波探测雷达与脉冲探测雷达。 连续波探测雷达连续不断的发射与接收某一频率连续波,而脉冲探测雷达则是发射与接收脉冲信号的探测雷达。连续波雷达的原理较为简单,它的发射机和接收机都采用同一信号源,采用超外差式接收机或者零拍接收机【3】。它不断的发射和接受窄带信号连续波,因此不需要接收和发射选通,并且由于窄带信号的特点,连续波雷达对滤波器的要求不高,其接收机每一级的滤波器可以设计的较为简单。连续波雷达最大的有点是,它可测量的目标物体的速度和距离范围极大,而脉冲和其他调制雷达则要受到待测目标物体速度和距离的限制。 1970年后,利用连续波雷达测量呼吸和心跳被逐渐提出了。当时,呼吸和心跳是分开测量的。Lin等人使用了X波段的扫描震荡器,发射天线采用指向目标的号角天线,测量了30厘米处未被麻醉的兔子的呼吸,并且利用同样的系统测量了麻醉过的兔子和猫的心跳【4,5,6】。 1980年后到1990年间,出现了在系统中同时处理模拟信号和数字信号的新系统,可以通过信号的处理区别呼吸信号和心跳信号,这样就可以同时进行呼吸与心跳信号的测量了【7,8,9,10】。1990年,Chuang等人利用一种自动消除杂波的电路及其算法,成功测量了7层砖和10英尺碎石后面的呼吸与心跳信号【8,9】。他的系统中采用了工作频率分别为2GHz和10GHz的两种,其中2GHz
微波传感器的原理及应用
微波传感器的原理及应用 【摘要】微波传感器是利用微波的传输性能好、易反射、被吸收功率易测量等特点,用专门的微波振荡器来产生微波,特定的天线收发微波,在实际生产生活中用来测量被测物的距离、厚度、传输媒介性质等许多应用。 【关键词】微波传感器反射式遮断式 一、微波的基础知识 1、微波的性质与特点 微波是波长为1~1000mm的电磁波,它既具有电磁波的性质,又不同于普通无线电波和光波。微波相对于波长较长的电磁波具有下列特点:1.定向辐射装置容易制造;2.遇到工作障碍物易于反射;3.绕射能力较差;4.传输性能良好,传输过程中受烟、火馅、灰尘、强光等的影响很小;5.介质对微波的吸收与介质的介电常数成比例,水对微波的吸收能力最强。正是这些特点构成了微波检测的基础。2、微波振荡器与微波天线 微波振荡器是产生微波的装置。由于微波很短,频率很高(300MHz~300GHz),振荡回路具有非常微小酌电感与电容,故不能用普通的电子管与晶体管构成微波振荡器。构成微波振荡器的器件有调速管、磁控管或某些固体元件。小型微波振荡器也可采用体效应管。 由微波振荡器产生的振荡信号需要用波导管(波长在1000cm以上可用同轴线)传输,并通过天线发射出去。为了使发射的微波具有尖锐的方向性,天线具有特殊的结构。常用的天线如图1所示,有喇叭
形天线、抛物面天线、介质天线与隙缝天线等。 喇叭形天线结构简单,制造方便,可看作波导管的延续。喇叭形天线在波导管与敞开的空间之间起匹配作用以获得最大的能量输出。抛物面天线犹如凹面镜产生平行光,这样位微波发射的方向性得到改善。 图1 常用微波天线 (a) 扇形喇叭天线(b) 圆锥形喇叭天线 (c) 旋转抛物面天线(d) 抛物柱面天线 二、微波传感器 由发射天线发出的微波,遇到被测物时将被吸收或反射,使功率发生变化。若利用接收天线,接收通过被测物或由被测物反射回来的
微波雷达系统介绍
微波雷达系统介绍 摘要:首先介绍了雷达的基本工作原理,对雷达的基本参数进行了简单的说明,而后对雷达中用到的微波器件做了说明,主要介绍了两种雷达结构,最后对雷达系统进行了简单总结。 关键词:雷达;微波 0前言 20世纪40年代,电磁波被用于发现目标和测量目标的距离,称之为“无线电探测和测距”(radio detecting and ranging ),取这几个英文字母便构成radar (雷达)一词。按照IEEE 的标准定义[1],雷达是通过发射电磁波信号,接收来自其威力覆盖范围内目标的回波,并从回波信号中提取位置和其他信息,以用于探测、定位,以及有时进行目标识别的电磁波系统。由于微波具有频带宽、穿透电离层能较强、似光性等优点,雷达就是利用了微波这些特性的典型代表。 1雷达的基本工作原理[2][4] 雷达的基本工作原理是,发射机通过天线向空间定向发送探测信号,信号被远距离的目标部分反射后,由天线接收并传送到接收机接收检测和信号处理,观测人员可以在接收机输出端显示屏上观测有无目标以及目标的性质和距离。如果发射和接收共用一副天线,叫做单站雷达;如果收、发系统各有自己的天线,则叫做双站雷达,分别如图1和图2所示。 G 图1单站雷达图 t G r G 图2双站雷达图 以单站雷达为例。发射功率t P ,发射天线增益G ,传输距离R ,则目标处的功率密度为 124t PG S R π=(W/m 2)
目标将在各个方向散射入射功率,在某个给定方向上的散射功率与入射功率密度之比定义为目标的雷达截面σ,表征目标的电磁散射特性,即 1 s P S σ=(m 2) 因此雷达截面具有面积的量纲,是目标本身的特性,它还依赖于入射角、反射角和入射波的偏振态。若把散射场看作二次源,二次辐射的功率密度为 222(4) t PG S R σπ=(W/m 2) 由天线的有效面积定义式24t RM eff i G P A S λπ ==,RM P 最大接收功率。可得,接收功率为 2234(4)t t r PG P R λσπ= 这就是雷达方程,接收功率单位W 。接收功率按4 1/R 减小,这意味着为了检测远距离目标,需要高功率发射机和高灵敏度接收机。 由于天线接收噪声和接收机噪声,存在接收机能够识别的最小监测功率。若这一功率是min P ,则得到最大可探测距离为 1/422max 3min (4)t t PG R P λσπ??=????(m ) 信号处理技术能够有效降低最小可检测信号,从而增加了可测量距离。 2雷达的基本参数[3] 2.1分辨率 分辨率可严格定义为分辨具有不同对比度的相隔一定距离的相邻目标的能力。一般习惯使用一个不太精确的定义,既对微波系统来说,分辨率通常是指测量系统响应的半功率宽度。 2.2角度分辨 毫米波雷达及辐射计通常都采用窄波束天线来提高角度分辨率。角度分辨一般采用半功率点的波束宽度来表示。其半功率点的波束宽度可表示为 h h K D λθ= h K —取决于天线类型和加权函数的系数;λ—波长;D —天线口径。 2.3距离分辨 大多数雷达都采用距离分辨概念。距离的分辨率由测量信号从雷达发至目标,并返回雷达所需的这一有限时间间隔决定。 当忽略大气对微波传播速度的影响(一般只有十万分之几的数量级),电波从雷达传播到目标往返引起的时间延迟,就是电波传播从雷达到目标的两倍距离的时间,可由下
微波雷达感应模块原理调试
雷达感应开关原理调试 微波碍应宙达开关馬应桓原理图 1. 主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外 PCB 两层铜箔间的电容、三极管内阻、寄生电容等构成 RC 震荡电路,该震荡电路震荡产生高频信号, 经过三极管放大,再经过围绕 PCB 三边的天线发射出去。发射的 2.4-3.2GHZ 的微波信号如果遇到移动 物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移 频就会以3- 20MHZ 左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制 灯光。另外,中间也可 以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。 2. 发射频率:RC 振荡电路的频率f=1/2 n RC 公式中的R 是原理图中三极管的输入阻抗, C 是PCB 上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。该电容量公式为 C=e S/d ,式中&为介质(在这里就是指的 PCB 板材的介电常数),S 为PCB 极板面积,d 为极板间距 也就是PCB 厚度。 3. 接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信 号P4。 4. 发射避开公共频段又不能过高:因为 3G 和4G 手机信号和 WIFI 信号的频率范围在 1.8-2.4GHZ , 模块的工作频率尽可能避开这个频段,避免相互干扰。一般的发射频率 2.5GHz 左右最佳,频率过高, 原理简介: 5 - i ::: lOOPF. GND 去耦銭路板 夭线 回羽天线背面不 敷聂铜融 SING OUT 御片左典iriQR —1 R5 4.7-10K C8 W0 啊25V
雷达说明书
The future today with FURUNO's electronics technology. Catalogue No. R-185e TRADE MARK REGISTERED MARCA REGISTRADA Antenna Unit for FAR-2817/2827/2827W XN-12AF 33 kg 73 lb XN-20AF 39 kg 86 lb XN-24AF 42 kg 93 lb Antenna Unit for FAR-2837S/2837SW SN-30AF 127 kg 280 lb SN-36AF 133 kg 293.2 lb Display Unit MU-231CR 15.0 kg 33.0 lb Bracket mount Control Unit Full-keyboard type RCU-014 3.7 kg 8.2 lb Trackball type RCU-015 2.4 kg 5.3 lb Remote Control Unit RCU-016 2.4 kg 5.3 lb Panel mount Processor Unit RPU-013 10 kg 22 lb Transceiver Unit for FAR-2827W RTR-081 8.0 kg 17.6 lb Transceiver Unit for FAR-2837SW RTR-082 17.0 kg 37.5 lb 23.1" High resolution Multi-color LCD A utomatic R adar P lotting A id FAR-28x7 series 92 3.6" 398 15.7" 308 12.1"136 5.4"180 7.1" 4- 4 54 2.1"39 1.5"555 21.9" 18 0.7" 468 18.4" 124 4.9" 300 11.8" 4- 15 1260 49.6" 360 14.2" 411 16.2" 953.7" 498 19.6"418 16.5"183 7.2" 271.1" 350 13.8" 70.3" 385 15.2"370 14.6" 251.0" 340 13.4"380 15.0" 2- 7 410 16.1" 98 90 110 4.3"4- 4 160 6.3" 136 5.4"180 7.1" 89 3.5" 50 2.0"35 1.4"110 4.3"4- 4 160 6.3" 136 5.4"180 7.1" 89 3.5" 50 2.0"35 1.4"300 11.8" 468 18.4"137 5.4" 570 22.4" 180.7" XN-20AF: 2040 80.3"XN-24AF: 2550 100.4" 4- 15 432 17.0" 561 22.1"275 10.8" 378 14.9"420 16.5"710 28.0" 184 7.2" 421 16.6" 432 17.0" SN-36AF: 3765 148.2"SN-30AF: 3090 121.7" 570 22.4"598 23.5" 4- 8 313 12.3"505 19.9" 963.8" 301.2"803.2" 554 21.8" 570 22.4" 313 12.3" 471 18.5" 598 23.5" 590 23.2" Hand Grip (option)110 4.3 " 50 5 19 .9" 451 17.8" 35 287 11.3"352 13.9"Bracket (option) 26 1.0"4- 8 250 9.8" 12 0.5" 353 14.0"380 15.0" 251.0" 325 12.8" 165 6.5" 160 6.3"200 7.9"149 5.9" 157 6.2" 404 15.9"6- 10 270 10.6"88 3.5" 192 7.6" 457 18.0"210 8.3"210 8.3"150.6" 427 16.9" 15 0.6" 510 20.1" 1054.1"1054.1"8- 15 286 11.3" 250 9.8"432 17.0" 350 13.8"530 20.9" 1104.3"1104.3" 1003.9"1375.4" INTERCONNECTION DIAGRAM RW-9600, 15 m RW-9600, 15 m For FAR-2817/2827 DPYCY x 3 (DPYCY -6 x 2 + TPYCY -2.5) + TTYCY -4 + RG-12/U, 70 - 270 m DVI Monitor GPS Compass SC-50/110VDR AIS FA-1505 m IEC 61162-1250V-MPYC-7 Performance Monitor PM-51 For FAR-2837S For FAR-2827W/37SW Antenna Unit (Specify when ordering) Performance Monitor PM-31 for FAR-2827W PM-51 for FAR-2837SW Power Supply Unit PSU-007 250V-DPYCY -1.5 Processor Unit RPU-013Control Unit RCU-014 RCU-015 03S-961010/20/30 m 10/20/30 m 10/20/30 m Remote Control Unit RCU-016 DVI-Analog RGB Convirrsion Kit Gyro Interface GC-10 IEC 61162-1250V-TTYC-1IEC 61162-1250V-TTYC-4 DVI Gyro Converter AD-100 GP-90 (Position, SOG, COG)SDME (STW for ARP A) Gyrocompass 100-230 VAC, 1 , 50/60 Hz 440 VAC, 1 , 50/60 Hz* 24 VDC 115/230 VAC, 1 , 50/60 Hz 440 VAC, 1 , 50/60 Hz* 24 VDC T ransceiver Unit RTR-081 for FAR-2827W RTR-082 for FAR-2837SW 200 VAC, 3 , 50 Hz*220 VAC, 3 , 60 Hz 380 VAC, 3 , 50 Hz 440 VAC, 3 , 60 Hz Switching HUB HUB-100 Ethernet 100Base-TX Memory Card Interface Unit CU-200 FAR-21x7/28x7 ECDIS FER-2107/2807RW-960015/30/40/50 m Option or Shipyard Supply Power Specify power supply when ordering *Optional transformer required Display Unit MU-231CR Junction Box Junction Box Performance Monitor PM-31 RGB Connector D-Sub-BNC-1 AD-10 (exclude hand grips and bracket) TRADE MARK REGISTERED MARCA REGISTRADA SPECIFICATIONS SUBJECT TO CHANGE WITHOUT NOTICE 05125U Printed in Japan