旋转装置

旋转装置
一、设计方案
①由上一工序所传递过来的轮胎成品,在此装置上竖立旋转。为修补轮胎提供准确的定位。所以该装置由底座、旋转台、旋转支撑构成,采用手动旋转。
②此装置采用的轴承为推力调心滚子轴承,因为此轴承是以轴向载荷为主的轴向、径向联合载荷,但径向载荷不得超过轴向载荷的55%。运转中滚动体受离心力矩作用,滚动体与滚动道间产生滑动,并导致轴圈与坐圈分离。为保证正常工作,需施加一定的轴向载荷。允许轴圈对座圈轴线偏移量≦1.5°~2.5°
③旋转平台采用圆面平台并由挡板固定轮胎。 二、尺寸的确定
(1)由人体工程学尺寸此装置的高度为50cm ,平台直径大于最大轮胎直径(105cm )选取120cm 。底座采用方形底座。 三、轴承的选择
①密封:推力调心滚子轴承不带密封圈
②润滑:这类轴承没有预填润滑脂。一般采用油润滑。在有些情况下,也可以用含有EP 添加剂的润滑脂进行润滑。如果轴承内部填满润滑脂,那么可以保证滚子端面和档边的接触区域充足润滑。
③型号:由于此装置转动所要求的转速较低或基本不转动,轴承所承受的力基本为静载荷。对于轴承承受的当量静载荷有以下公式:
r a F F p 0007.2+=
(其中
0p 是轴承当量静载荷,a F 0是轴向静载荷,r F 0是径向静载荷)
带入公式得此轴承所承受的当量静载荷N P 120007.212000
=?+=。
旋转平台的自重假设为N 200,所以轴承承受的轴向载荷为N 1400。
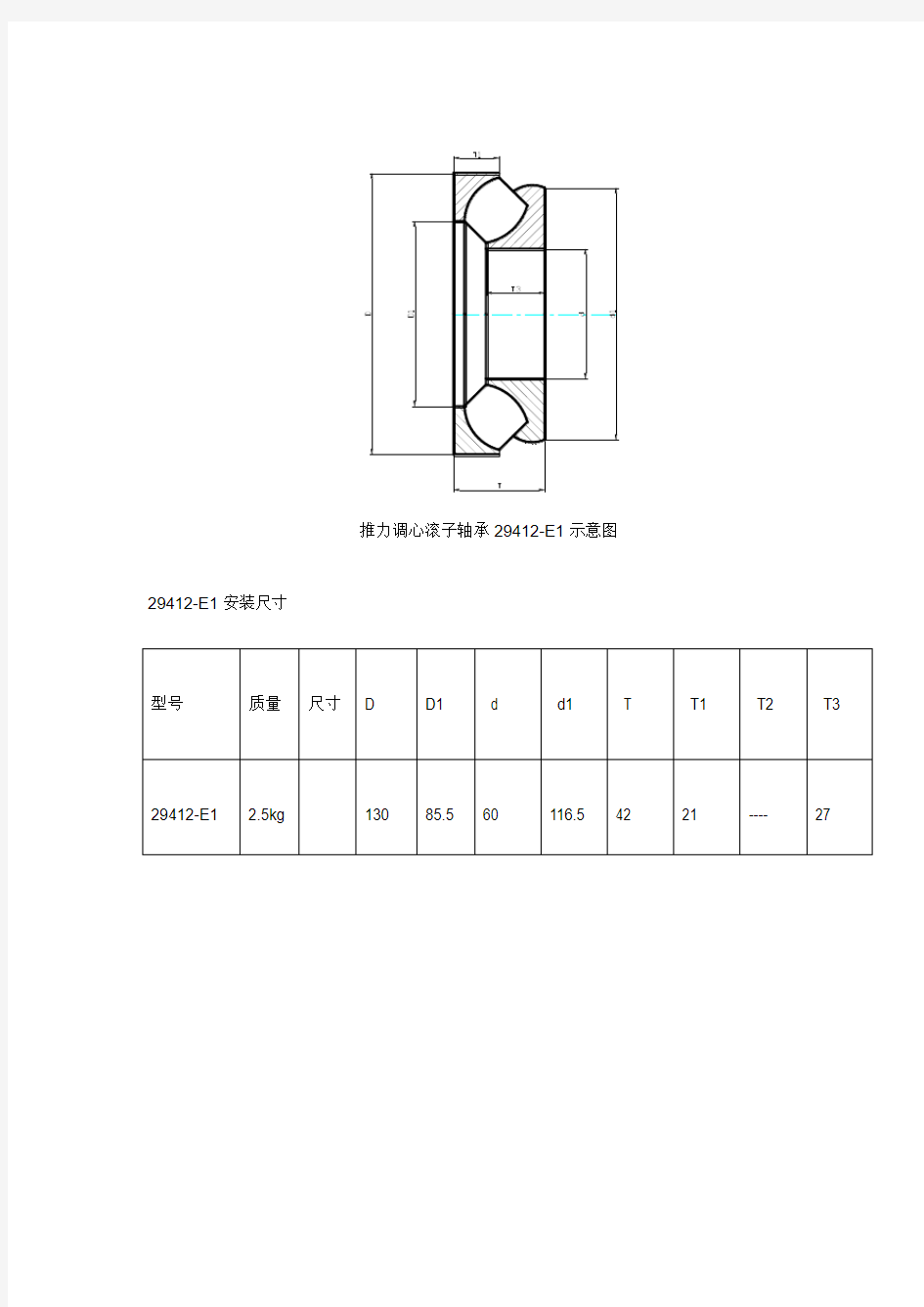
由推力轴承样本中任何一个推力调心轴承所能承受的重力均远远大于轮胎重力与平台承重。所以由表格1轴承选用型号为29412-E1的推力轴承。
推力调心滚子轴承29412-E1示意图
29412-E1安装尺寸
型号质量尺寸 D D1 d d1 T T1 T2 T3 29412-E1 2.5kg 130 85.5 60 116.5 42 21 ---- 27
四、旋转装置
旋转装置结构示意图
论转动装置的精确定位
论转动装置的精确定位 摘要:在各行各业中,随着技术的进步和科技的发展,系统对转动装置的定位要求越来越高,电机,阀门,电动蝶阀, 伺服电机在生产中的位置定位要求越来越精确,随着 PLC技术的进步,仪表行业通讯的发展,如今许多位置 精确定位已能在生产中得到应用。 关键词:电机,阀门,电动蝶阀,PLC,伺服电机,智能电气阀门定位器,电气,变频器。 转动装置的定位方法 转动装置在机械中有转动和反馈,机械定位在电机轴承中加制动闸阀,可以有效的定位,对于克服惯性有一定的效果。位置开关和光电接近开关的点开点关控制,编码器的脉冲控制。 电机的定位控制 在一些大型转动装置中,负载的惯性较大,对于生产的影响也比较大,普通电机没有很好的克服惯性的作用,为此解决问题的方法一般有两种。 一:光电开关和制动闸阀的位置控制,在轴承上加上制动闸阀,电机速度控制通过变频器,通过PLC控制,在 负载中加光电接近开关,起动步进电机要逐步加速,停 止的时候,当步进电机到接近开关的时候,通过变频器 要逐步减速,最后到控制位置的时候,制动闸阀会很好
的控制。 二:在轴承上加编码器,通过脉冲来控制电机,这样位置控制比较精确,但是克服惯性有一定的困难,所以一般 加上接近开关,通过PLC控制,在电机与负载之间加 弹性,缓冲连接,开始加速,到接近开关的时候加速, 能很好的克服惯性。 电动蝶阀的准确定位 阀门都有位置反馈信号,对于要求精度不高的系统中,可以通过PLC,阀门反馈来的位置,起始加速,接 近位置的时候减速的方法来实现,智能电气阀门定位器 也能控制电动蝶阀。如果惯性过大,除了在程序上改进 外,在转动轴承上加上制动闸阀,也可以加上弹性装置 以较小惯性。 伺服电机的准确定位 伺服电机是有脉冲反馈的,转一圈对应一定量的脉冲,1通常有三种控制方法进行位置控制,最简单的用法就是一边输出脉冲,一边读反馈回来的反映运转情况的脉冲(或模拟信号),根据这个脉冲调整输出脉冲。这种用法用PLC的高速计数器就行。 2 还可以通过AD输出模拟信号,然后读反馈回来的反映运转情况的脉冲(或模拟信号),这种方法一般用在单片机控制伺服电机中,比较灵活,可以脉冲和模拟信号混合使用;
旋转装置
旋转装置 一、设计方案 ①由上一工序所传递过来的轮胎成品,在此装置上竖立旋转。为修补轮胎提供准确的定位。所以该装置由底座、旋转台、旋转支撑构成,采用手动旋转。 ②此装置采用的轴承为推力调心滚子轴承,因为此轴承是以轴向载荷为主的轴向、径向联合载荷,但径向载荷不得超过轴向载荷的55%。运转中滚动体受离心力矩作用,滚动体与滚动道间产生滑动,并导致轴圈与坐圈分离。为保证正常工作,需施加一定的轴向载荷。允许轴圈对座圈轴线偏移量≦1.5°~2.5° ③旋转平台采用圆面平台并由挡板固定轮胎。 二、尺寸的确定 (1)由人体工程学尺寸此装置的高度为50cm ,平台直径大于最大轮胎直径(105cm )选取120cm 。底座采用方形底座。 三、轴承的选择 ①密封:推力调心滚子轴承不带密封圈 ②润滑:这类轴承没有预填润滑脂。一般采用油润滑。在有些情况下,也可以用含有EP 添加剂的润滑脂进行润滑。如果轴承内部填满润滑脂,那么可以保证滚子端面和档边的接触区域充足润滑。 ③型号:由于此装置转动所要求的转速较低或基本不转动,轴承所承受的力基本为静载荷。对于轴承承受的当量静载荷有以下公式: r a F F p 0007.2+= (其中 0p 是轴承当量静载荷,a F 0是轴向静载荷,r F 0是径向静载荷) 带入公式得此轴承所承受的当量静载荷N P 120007.212000 =?+=。 旋转平台的自重假设为N 200,所以轴承承受的轴向载荷为N 1400。 由推力轴承样本中任何一个推力调心轴承所能承受的重力均远远大于轮胎重力与平台承重。所以由表格1轴承选用型号为29412-E1的推力轴承。
推力调心滚子轴承29412-E1示意图 29412-E1安装尺寸 型号质量尺寸 D D1 d d1 T T1 T2 T3 29412-E1 2.5kg 130 85.5 60 116.5 42 21 ---- 27
圆盘旋转控制装置
石家庄铁道大学四方学院 集中实践报告书 课题名称 圆盘旋转控制装置 姓 名 *** 学 号 2012**** 系、 部 电气工程系 专业班级 方**** 指导教师 李** 2014年12月 31日 ※※※※※※※※ ※ ※※ ※ ※ ※ ※ ※ ※ ※ ※ ※※※※※ 2012级 PLC 课程设计
目录 第1章设计目的 (1) 第2章设计要求 (1) 第3章PLC的选型、I/O分配表、接线图 (2) 3.1PLC的选型 (2) 3.2I/O分配表 (2) 3.3接线图 (3) 第4章设计PLC的程序 (4) 4.1梯形图设计 (4) 4.2指令表 (7) 第5章设计总结 (9) 参考文献 (9)
第1章 设计目的 课题“圆盘旋转控制装置”是用PLC 设计出圆盘旋转控制装置系统。了解PLC 系统的设计过程、设计要求、应完成的工作内容和设计方法。通过设计也有助于巩固所学知识,达到灵活运用的目的,培养设计思路,提高动手能力,做到学以致用。圆盘旋转控制装置作为母体可以衍生出很多具体的设计要求。如餐桌的自动旋转设计、元件的自动打磨设计等,应用非常广泛。 第2章 设计要求 1)在圆盘四周每隔90度设置一个限位开关,圆盘在原位时按下起动按钮后,圆盘正转180度,反转90度,正转180度,反转270度到原位停止,如图2-1所示。 2)当停电后再来电时按下起动按钮,圆盘能按照停电前的动作过程继续运行。 3)圆盘旋转控制有两种控制方式为:单周期控制方式,按下起动按钮后,圆盘自动按上述四步工作过程完成后停止;单步进控制方式,每按起动按钮一次,圆盘完成一步工作过程,到原点时停止。 图2-1 工作原理图 (a )圆盘示意图 X5 X6 X4 X0起动按钮 Y0 原位显示X1停止按钮 X2 转移/禁转
简易旋转倒立摆及控制装置
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题) 【本科组】 2013年9月7日
摘要 本题要求设计一个简易旋转倒立摆及控制系统,其中角度传感器、步进电机和单片机890C521是系统核心部件。系统接收角度传感器反馈的信号,通过PCF8591将接收的信号转换成数字信号,将数值送入单片机中进行计算,可得出摆杆的位置,进而单片机控制步进电机,对摆杆进行控制,达到所要的旋转或者倒立的控制目标。 关键词:简易旋转倒立摆步进电机单片机角度传感器
目录 1 设计任务及要求 (5) 1.1 设计任务 (5) 1.2 基本要求 (5) 2主控制器件的论证与选择 (6) 2.1控制器选用 (6) 2.2控制系统方案选择 (6) 2.3角度的获取模块论证与选择 (6) 2.4步进电机及其驱动模块的选择 (7) 2.5 AD/DA的选择 (7) 3 系统的硬件设计 (7) 3.1总体电路框图 (7) 图3-1 系统框图 (8) 3.2系统电路与程序设计 (9) 3.2.1 STC89C52单片机最小系统 (9) 3.2.2 PCF8591模块图如图3-2。 (10) 3.3.3 模块芯片TB6560AHQ原理图如图3-3。 (10) 3.3.4 供电电源 (11) 4系统软件总体设计框图 (13) 5 测试方案与测试结果 (13) 6 总结 (15) 参考文献 (16) 附录 (17)
简易旋转倒立摆及控制装置(C题) 【本科组】 1 设计任务及要求 1.1 设计任务 设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图1-1 所示。电动机 A 固定在支架 B 上,通过转轴 F 驱动旋转臂 C 旋转。摆杆 E 通过转轴 D 固定在旋转臂 C 的一端,当旋转臂 C 在电动机 A 驱动下作往复旋转运动时,带动摆杆 E 在垂直于旋转臂 C 的平面作自由旋转。 图1-1 旋转倒立摆结构示意图 1.2 基本要求 (1)摆杆从处于自然下垂状态(摆角 0°)开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°; (2)从摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动; (3)在摆杆处于自然下垂状态下,外力拉起摆杆至接近 165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于 5s;期间旋转臂的转动角度不大于 90°。