运动控制系统课程设计论文
操作系统课程设计报告书
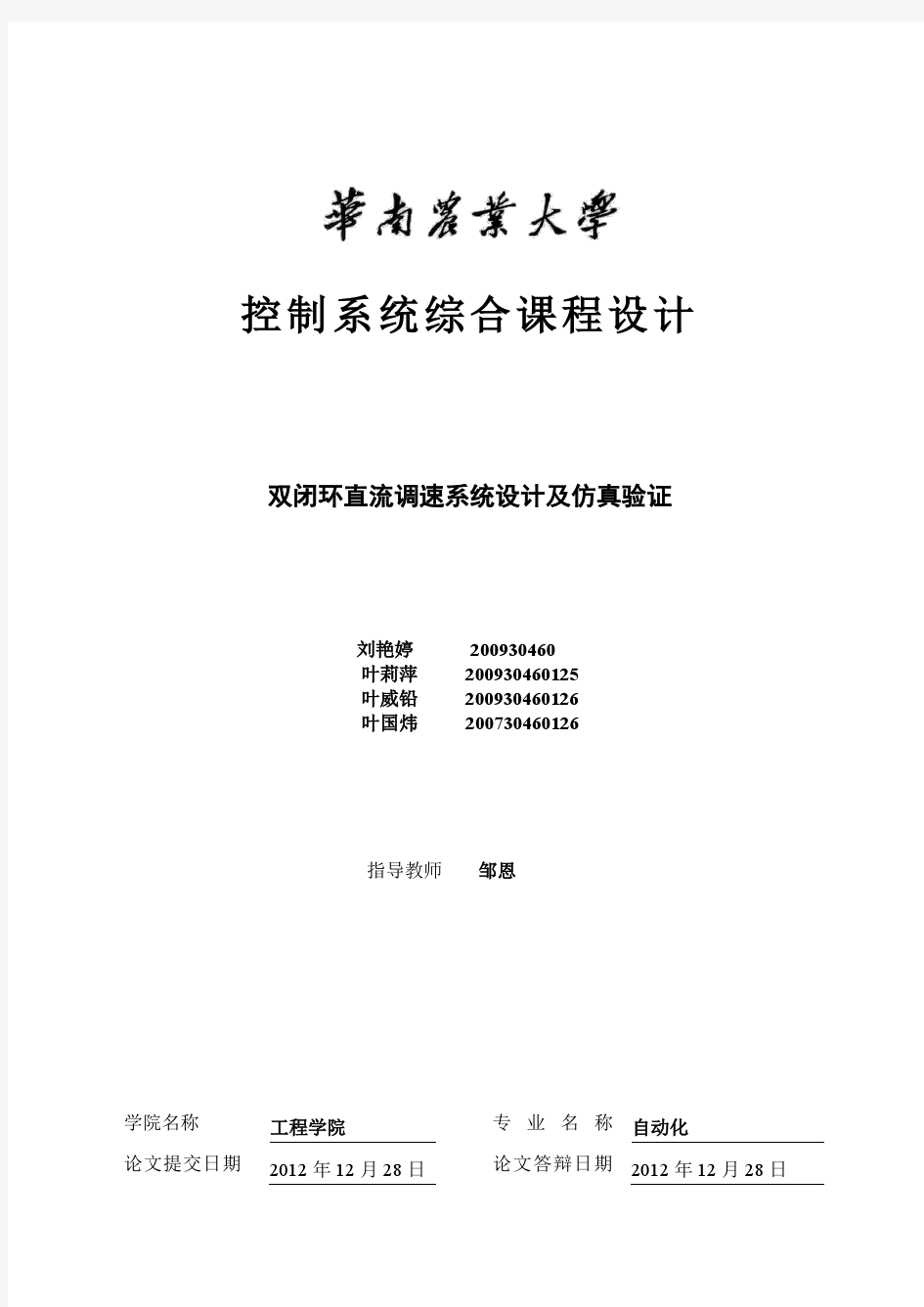
题目1 连续动态内存管理模拟实现 1.1 题目的主要研究内容及预期达到的目标 (1)针对操作系统中内存管理相关理论进行设计,编写程序并进行测试,该程序管理一块虚拟内存。重点分析三种连续动态内存分配算法,即首次适应算法、循环首次适应算法和最佳适应算法。 (2)实现内存分配和回收功能。 1.2 题目研究的工作基础或实验条件 (1)硬件环境:PC机 (2)软件环境:Windows XP,Visual C++ 6.0 1.3 设计思想 首次适应算法的实现:从空闲分区表的第一个表目起查找该表,把最先能够满足要求的空闲区分配给作业,这种方法的目的在于减少查找时间。为适应这种算法,空闲分区表中的空闲分区要按地址由低到高进行排序。该算法优先使用低址部分空闲区,在低址空间造成许多小的空闲区,在高址空间保留大的空闲区。 循环首次适应算法的实现:在分配内存空间时,不再每次从表头开始查找,而是从上次找到空闲区的下一个空闲开始查找,直到找到第一个能满足要求的的空闲区为止,并从中划出一块与请求大小相等的内存空间分配给作业。该算法能使内存中的空闲区分布得较均匀。 最佳适应算法的实现:从全部空闲区中找到能满足作业要求的、且最小的空闲分区,这种方法能使碎片尽量小。为适应此算法,空闲分区表中的空闲分区要按从小到大进行排序,从表头开始查找第一个满足要求的自由分配。 1.4 流程图 内存分配流程图,如图1-1所示。
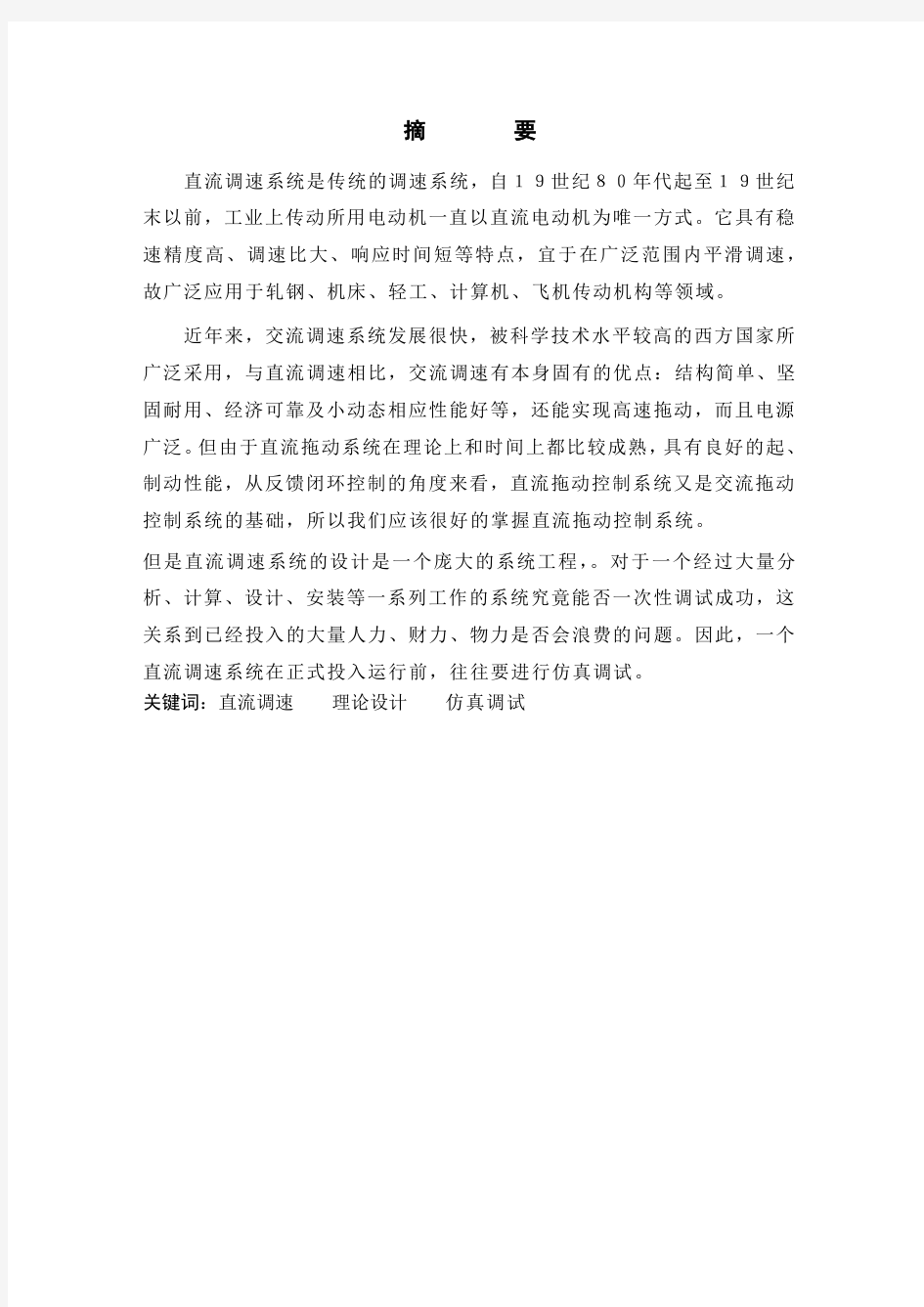
图1-1 内存分配流程图内存回收流程图,如1-2所示。
图1-2 内存回收流程图 1.5 主要程序代码 (1)分配内存 void allocate(char z,float l) { int i,k; float ad; k=-1; for(i=0;i 课程设计报告 2015~2016学年第一学期 操作系统综合实践课程设计 实习类别课程设计 学生姓名李旋 专业软件工程 学号130521105 指导教师崔广才、祝勇 学院计算机科学技术学院 二〇一六年一月 - 1 - - 2 - 一、概述 一个目录文件是由目录项组成的。每个目录项包含16B,一个辅存磁盘块(512B)包含32个目录项。在目录项中,第1、2字节为相应文件的外存i节点号,是该文件的内部标识;后14B为文件名,是该文件的外部标识。所以,文件目录项记录了文件内、外部标识的对照关系。根据文件名可以找到辅存i节点号,由此便得到该文件的所有者、存取权、文件数据的地址健在等信息。UNIX 的存储介质以512B为单位划分为块,从0开始直到最大容量并顺序加以编号就成了一个文件卷,也叫文件系统。UNIX中的文件系统磁盘存储区分配图如下: 本次课程设计是要实现一个简单的模拟Linux文件系统。我们在内存中开辟一个虚拟磁盘空间(20MB)作为文件存储器,并将该虚拟文件系统保存到磁盘上(以一个文件的形式),以便下次可以再将它恢复到内存的虚拟磁盘空间中。文件存储空间的管理可采用位示图方法。 二、设计的基本概念和原理 2.1 设计任务 多用户、多级目录结构文件系统的设计与实现。可以实现下列几条命令login 用户登录 logout 退出当前用户 dir 列文件目录 creat 创建文件 delete 删除文件 open 打开文件 close 关闭文件 - 3 - read 读文件 write 写文件 mkdir 创建目录 ch 改变文件目录 rd 删除目录树 format 格式化文件系统 Exit 退出文件系统 2.2设计要求 1) 多用户:usr1,usr2,usr3,……,usr8 (1-8个用户) 2) 多级目录:可有多级子目录; 3) 具有login (用户登录)4) 系统初始化(建文件卷、提供登录模块) 5) 文件的创建:create (用命令行来实现)6) 文件的打开:open 7) 文件的读:read8) 文件的写:write 9) 文件关闭:close10) 删除文件:delete 11) 创建目录(建立子目录):mkdir12) 改变当前目录:cd 13) 列出文件目录:dir14) 退出:logout 新增加的功能: 15) 删除目录树:rd 16) 格式化文件系统:format 2.3算法的总体思想 - 4 - 辽宁工业大学PLC技术及应用课程设计(论文)题目:啤酒发酵过程中温度的PLC控制 毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期: 学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日 机械手运动控制系统设计 基于S7200PLC村机械于的运动进行一系列控制,这些运动包括手臂上下、左右直线运动,手腕旋转运动,手爪夹紧动作和机械手整体旋转运动等。所采用的动力机构是步进电机,能够做到精确控制。在多个行程开关传感器的保护下,保证了这些运动万无一失。 工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,并已成为现代制造生产系统中的一个重要组成部分,越来越多地被研究和应用。本设汁的控制系统采用小型可编程控制器S7200PLC,具有编程简单、修改容易、可靠性高等优点。 1机械手的选择根据古典力学的观点,物体在三维空间内的静止位置是由三个坐标或围绕三轴旋转的角度来决定的。因此,物体的位置和方向(即关节的角度)能从理论上求得。在实际生产生活中,机械手的自由度不是盲目模仿人手的动作来确定的,而是根据实际需要的动作,设计出最少自由度的机械手来满足作业要求。所以一般专用机械手(不包括握紧动作)通常只具有2~3个自由度。而通用机械手则一般取4~5个自由度。本设计采用的机械手共有5个自由度。 这五个自由度为机械手能够做出手臂伸缩、手臂上下摆动、手臂左右摆动、手腕回转、手指抓紧,该机械手示意图如图1所示。 工业机械手要求精度非常高,所以本设计采用的是步进电机,步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为步距角,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数宋控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 不过步进电机需要在驱动器的作用下才能正常工作,所以还要选择驱动器,本设计选择的是价格便宜而又方便使用的中美合资SH系列步进电动机驱动器,主要由电源输入部分、信号输入部分、输出部分等,实物图和接线原理图分别如图2和图3所示。 操作系统课程设计报告 东莞理工学院 操作系统课程设计报告 学院:计算机学院 专业班级: 13软件工程1班 提交时间: 2015/9/14 指导教师评阅意见: . 项目名称:进程与线程管理功能 一、设计目的 用语言来模拟进程和线程管理系统,加深对进程和线程的理解,掌握对进程和线程各种状态和管理的算法原理。 二、环境条件 系统: WindowsXP、VMWare、Ubuntu Linux 语言:C/C++ 开发工具:gcc/g++、Visual C++ 6.0 三、设计内容 1. 项目背景 计算机的硬件资源有限,为了提高内存的利用率和系统的吞吐量,就要根据某种算法来管理进程和线程的状态从而达到目的。 进程与线程管理功能完成基于优先级的抢占式线程调度功能,完成进程虚拟内存管理功能。 进程与线程管理功能 基本要求:完成基于优先级的抢占式线程调度功能,完成进程虚拟内存管理功能。 提高要求:(增加1项就予以加分) (1) 实现多种线程调度算法; (2)通过“公共信箱”进行通信的机制,规定每一封信的大小为128字节,实现两个用户进程之间通过这个“公共信箱”进行通信。 (3) 实现多用户进程并发的虚拟内存管理功能。 (4) 实现用户进程间通信功能,并用生产者/消费者问题测试进程间通信功能的正确性。 (5) 实现改进型Clock页面置换算法。 (6) 实现Cache功能,采用FIFO替换算法。 2. 扩展内容 实现多种线程调度算法:时间片轮转调度算法 四、人员分工 优先级调度算法:钟德新,莫友芝 时间片轮转调度算法:张德华,袁马龙 设计报告由小组队员共同完成。小组成员设计的代码分工如下:钟德新编写的代码:void Prinft(){ PCB *p; system("cls");//清屏 p=run; //运行队列 if(p!=NULL) { p->next=NULL; } cout<<"当前正在运行的进程:"< 自控课程设计课程设计(论文) 设计(论文)题目单位反馈系统中传递函数的研究 学院名称Z Z Z Z学院 专业名称Z Z Z Z Z 学生姓名Z Z Z 学生学号Z Z Z Z Z Z Z Z Z Z 任课教师Z Z Z Z Z 设计(论文)成绩 单位反馈系统中传递函数的研究 一、设计题目 设单位反馈系统被控对象的传递函数为 ) 2)(1()(0 0++= s s s K s G (ksm7) 1、画出未校正系统的根轨迹图,分析系统是否稳定。 2、对系统进行串联校正,要求校正后的系统满足指标: (1)在单位斜坡信号输入下,系统的速度误差系数=10。 (2)相角稳定裕度γ>45o , 幅值稳定裕度H>12。 (3)系统对阶跃响应的超调量Mp <25%,系统的调节时间Ts<15s 3、分别画出校正前,校正后和校正装置的幅频特性图。 4、给出校正装置的传递函数。计算校正后系统的截止频率Wc 和穿频率Wx 。 5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 6、在SIMULINK 中建立系统的仿真模型,在前向通道中分别接入饱和非线性环节和回环非线性环节,观察分析非线性环节对系统性能的影响。 7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。 二、设计方法 1、未校正系统的根轨迹图分析 根轨迹简称根迹,它是开环系统某一参数从0变为无穷时,闭环系统特征方程式的根在s 平面上变化的轨迹。 1)、确定根轨迹起点和终点。 根轨迹起于开环极点,终于开环零点;本题中无零点,极点为:0、-1、-2 。故起于0、-1、-2,终于无穷处。 2)、确定分支数。 根轨迹分支数与开环有限零点数m 和有限极点数n 中大者相等,连续并且对称于实轴;本题中分支数为3条。 上海电力学院 计算机操作系统原理 课程设计报告 题目名称:编写程序模拟虚拟存储器管理 姓名:杜志豪.学号: 班级: 2012053班 . 同组姓名:孙嘉轶 课程设计时间:—— 评语: 成绩: 目录 一、设计内容及要求 (4) 1. 1 设计题目 (4) 1.2 使用算法分析: (4) 1. FIFO算法(先进先出淘汰算法) (4) 1. LRU算法(最久未使用淘汰算法) (5) 1. OPT算法(最佳淘汰算法) (5) 分工情况 (5) 二、详细设计 (6) 原理概述 (6) 主要数据结构(主要代码) (6) 算法流程图 (9) 主流程图 (9) Optimal算法流程图 (10) FIFO算法流程图 (10) LRU算法流程图 (11) .1源程序文件名 (11) . 2执行文件名 (11) 三、实验结果与分析 (11) Optimal页面置换算法结果与分析 (11) FIFO页面置换算法结果与分析 (16) LRU页面置换算法结果与分析 (20) 四、设计创新点 (24) 五、设计与总结 (27) 六、代码附录 (27) 课程设计题目 一、设计内容及要求 编写程序模拟虚拟存储器管理。假设以M页的进程分配了N 块内存(N 摘要 在现代工业中 , 生产过程的机械化、自动化已成为突出的主题。随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等。已经随处可见。同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有 毒气体、有害气体场合以及水下作业等,这写恶劣的生产环境不利于人工进行操作。工 业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动 化实践相结合的产物。并以为现代机械制造生产系统中的一个重要组成部分。工业机械 手是提高生产过程自动化、改善劳动条件、提高产品质量和身效益的有效手段之一。尤 其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。在我国, 近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。 机械手是在自动化生产过程中发展起来的一种新装置。广泛应用于工业生产和其他领域。PLC已在工业生产过程中得到广泛应用,应用 PLC控制机械手能实现各种规定工序动作,对生产过程有着十分重要的意义。论文以介绍 PLC在机械手搬运控制中的应用,设计了一套可行的机械手控制系统,并给出了详细的 PLC程序。设计完成的机械手可以在空间抓放、搬运物体等,动作灵活多样。 整个搬运机构能完成四个自由度动作,手臂伸缩、手臂旋转、手爪上下、手爪紧松。关键词:可编程控制器 ,PLC, 机械手操作控制系统 . 目录 第一章概述 (1) 1.1 PLC 控制系统 (1) 1.1.1PLC 的产生 (1) 1.1.2PLC 的特点及应用 (2) 1.2选题背景 (3) 1.2.1机械手简介 (3) 第二章PLC 控制系统设计 (6) 2.1总体设计 (6) 2.1.1制定控制方案 (6) 2.1.2系统配置 (6) 2.1.3控制要求 (9) 2.1.4控制面板 (12) 2.1.5 外部接线图 (13) 2.2.2手动方式状态 (16) 2.2.3回原点状态转移图: (19) 2.2.4自动方式状态 (19) 第三章控制系统内部软组件 (21) 3.1 内部软组件的概述 (21) 3.1.1输入继电器 (21) 3.1.2输出继电器 (21) 3.1.3辅助继电器 (22) 3.1.4状态组件 (23) 3.1.5定时器 (23) 错误!未定义书签。致谢 ........................................................................................................... 参考文献 (24) 东莞理工学院 操作系统课程设计报告学院:计算机学院 专业班级:13软件工程1班 提交时间:2015/9/14 指导教师评阅意见: . 项目名称:进程与线程管理功能 一、设计目的 用语言来模拟进程和线程管理系统,加深对进程和线程的理解,掌握对进程和线程各种状态和管理的算法原理。 二、环境条件 系统:WindowsXP、VMWare、Ubuntu Linux 语言:C/C++ 开发工具:gcc/g++、Visual C++ 6.0 三、设计内容 1. 项目背景 计算机的硬件资源有限,为了提高内存的利用率和系统的吞吐量,就要根据某种算法来管理进程和线程的状态从而达到目的。 进程与线程管理功能完成基于优先级的抢占式线程调度功能,完成进程虚拟内存管理功能。 进程与线程管理功能 基本要求:完成基于优先级的抢占式线程调度功能,完成进程虚拟内存管理功能。 提高要求:(增加1项就予以加分) (1) 实现多种线程调度算法; (2)通过“公共信箱”进行通信的机制,规定每一封信的大小为128字节,实现两个用户进程之间通过这个“公共信箱”进行通信。 (3) 实现多用户进程并发的虚拟内存管理功能。 (4) 实现用户进程间通信功能,并用生产者/消费者问题测试进程间通信功能的正确性。 (5) 实现改进型Clock页面置换算法。 (6) 实现Cache功能,采用FIFO替换算法。 2. 扩展内容 实现多种线程调度算法:时间片轮转调度算法 四、人员分工 优先级调度算法:钟德新,莫友芝 时间片轮转调度算法:张德华,袁马龙 设计报告由小组队员共同完成。小组成员设计的代码分工如下: 钟德新编写的代码:void Prinft(){ PCB *p; system("cls");//清屏 p=run; //运行队列 if(p!=NULL) { p->next=NULL; } cout<<"当前正在运行的进程:"< 自动控制原理课程设计 本课程设计的目的着重于自动控制基本原理与设计方法的综合实际应用。主要内容包括:古典自动控制理论(PID )设计、现代控制理论状态观测器的设计、自动控制MATLAB 仿真。通过本课程设计的实践,掌握自动控制理论工程设计的基本方法和工具。 1 内容 某生产过程设备如图1所示,由液容为C1和C2的两个液箱组成,图中Q 为稳态液体流量)/(3s m ,i Q ?为液箱A 输入水流量对稳态值的微小变化)/(3s m ,1Q ?为液箱A 到液箱B 流量对稳态值的微小变化)/(3s m ,2Q ?为液箱B 输出水流量对稳态值的微小变化)/(3s m ,1h 为液箱A 的液位稳态值)(m ,1h ?为液箱A 液面高度对其稳态值的微小变化)(m ,2h 为液箱B 的液位稳态值)(m ,2h ?为液箱B 液面高度对其稳态值的微小变化)(m ,21,R R 分别为A ,B 两液槽的出水管液阻))//((3s m m 。设u 为调节阀开度)(2m 。 已知液箱A 液位不可直接测量但可观,液箱B 液位可直接测量。 图1 某生产过程示意图 要求 1. 建立上述系统的数学模型; 2. 对模型特性进行分析,时域指标计算,绘出bode,乃示图,阶跃反应曲线 3. 对B 容器的液位分别设计:P ,PI ,PD ,PID 控制器进行控制; 4. 对原系统进行极点配置,将极点配置在-1+j 和-1-j ;(极点可以不一样) 5. 设计一观测器,对液箱A 的液位进行观测(此处可以不带极点配置); 6. 如果要实现液位h2的控制,可采用什么方法,怎么更加有效?试之。 用MATLAB 对上述设计分别进行仿真。 (提示:流量Q=液位h/液阻R ,液箱的液容为液箱的横断面积,液阻R=液面差变化h ?/流量变化Q ?。) 2 双容液位对象的数学模型的建立及MATLAB 仿真过程 一、对系统数学建模 如图一所示,被控参数2h ?的动态方程可由下面几个关系式导出: 液箱A :dt h d C Q Q i 111?=?-? 液箱B :dt h d C Q Q 22 21?=?-? 111/Q h R ??= 222/Q h R ??= u K Q u i ?=? 消去中间变量,可得: u K h dt h d T T dt h d T T ?=?+?++?222122221)( 式中,21,C C ——两液槽的容量系数 21,R R ——两液槽的出水端阻力 111C R T =——第一个容积的时间常数 222C R T =——第二个容积的时间常数 2R K K u =_双容对象的放大系数 ; 一、概述 课程设计目的、意义: 课程设计目的使学生熟悉文件管理系统的设计方法;加深对所学各种文件操作的了解及其操作方法的特点。通过模拟文件系统的实现,深入理解操作系统中文件系统的理论知识, 加深对教材中的重要算法的理解。同时通过编程实现这些算法,更好地掌握操作系统的原理及实现方法,提高综合运用各专业课知识的能力。 主要任务: 模拟文件系统设计是设计和实现一个简单的文件系统。内容包括: 1.建立文件存储介质的管理机制 2.建立目录(采用一级目录结构) 3.文件系统功能(显示目录、创建、删除、打开、关闭、读、写) ~ 4.文件操作接口(显示目录、创建、删除、打开、关闭、读、写) 二、系统设计 课程设计的系统设计: 本系统模拟一个文件管理系统,要完成对文件的基本操作,文件的基本操作有文件、文件夹的打开、新建、删除和读取写入文件,创建更改目录,列出目录内容等信息。系统建立了文件目录树,存储文件系统中的所有文 件。对于用户名下的文件,用文件目录树的分枝来存贮。采用命令行操作界面很直观,也方便用户进行操作,用户只要按照操作界面所显示的命令来操作就行了。 整体设计框架: 系统初始化界面是由创建用户存储空间,管理文件,退出系统三个模块组成。用户创建由创建用户存储空间,进入目录,删除用户存储空间,显示所有用户存储空间,等模块组成。然后各个模块再由一些小模块组成。其中创建文件,打开关闭文件,读写文件等文件操作模块包括在进入目录模块里面。 三、系统实现 课程设计主要内容的实现程序代码: 《 #include <> #include <> #include <> typedef struct file{ char name[10]; struct file *next; }File; typedef struct content{ ! char name[10]; File *file; 扬州大学水利与能源动力工程学院 课程实习报告 课程名称:自动控制原理及专业软件课程实习 题目名称:三阶系统分析与校正 年级专业及班级:建电1402 姓名:王杰 学号: 141504230 指导教师:许慧 评定成绩: 教师评语: 指导老师签名: 2016 年 12月 27日 一、课程实习的目的 (1)培养理论联系实际的设计思想,训练综合运用经典控制理论和相关课程知识的能力; (2)掌握自动控制原理的时域分析法、根轨迹法、频域分析法,以及各种校正装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标; (3)学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试; (4)学会使用硬件搭建控制系统; (5)锻炼独立思考和动手解决控制系统实际问题的能力,为今后从事控制相关工作打下较好的基础。 二、课程实习任务 某系统开环传递函数 G(s)=K/s(0.1s+1)(0.2s+1) 分析系统是否满足性能指标: (1)系统响应斜坡信号r(t)=t,稳态误差小于等于0.01; (2)相角裕度y>=40度; 如不满足,试为其设计一个pid校正装置。 三、课程实习内容 (1)未校正系统的分析: 1)利用MATLAB绘画未校正系统的开环和闭环零极点图 2)绘画根轨迹,分析未校正系统随着根轨迹增益变化的性能(稳定性、快速性)。 3)作出单位阶跃输入下的系统响应,分析系统单位阶跃响应的性能指标。 4)绘出系统开环传函的bode图,利用频域分析方法分析系统的频域性能指标(相角裕度和幅值裕度,开环振幅)。 (2)利用频域分析方法,根据题目要求选择校正方案,要求有理论分析和计算。并与Matlab计算值比较。 (3)选定合适的校正方案(串联滞后/串联超前/串联滞后-超前),理论分析并计算校正环节的参数,并确定何种装置实现。 东莞理工学院 操作系统课程设计报告 学院:计算机学院 专业班级:13软件工程1班 提交时间:2015/9/14 指导教师评阅意见: . 项目名称:进程与线程管理功能 一、设计目的 用语言来模拟进程和线程管理系统,加深对进程和线程的理解,掌握对进程和线程各种状态和管理的算法原理。 二、环境条件 系统:WindowsXP、VMWare、Ubuntu Linux 语言:C/C++ 开发工具:gcc/g++、Visual C++ 6.0 三、设计内容 1. 项目背景 计算机的硬件资源有限,为了提高内存的利用率和系统的吞吐量,就要根据某种算法来管理进程和线程的状态从而达到目的。 进程与线程管理功能完成基于优先级的抢占式线程调度功能,完成进程虚拟内存管理功能。 进程与线程管理功能 基本要求:完成基于优先级的抢占式线程调度功能,完成进程虚拟内存管理功能。 提高要求:(增加1项就予以加分) (1) 实现多种线程调度算法; (2)通过“公共信箱”进行通信的机制,规定每一封信的大小为128字节,实现两个用户进程之间通过这个“公共信箱”进行通信。 (3) 实现多用户进程并发的虚拟内存管理功能。 (4) 实现用户进程间通信功能,并用生产者/消费者问题测试进程间通信功能的正确性。 (5) 实现改进型Clock页面置换算法。 (6) 实现Cache功能,采用FIFO替换算法。 2. 扩展内容 实现多种线程调度算法:时间片轮转调度算法 四、人员分工 优先级调度算法:钟德新,莫友芝 时间片轮转调度算法:张德华,袁马龙 设计报告由小组队员共同完成。小组成员设计的代码分工如下:钟德新编写的代码:void Prinft(){ PCB *p; system("cls");//清屏 p=run; //运行队列 if(p!=NULL) { p->next=NULL; } cout<<"当前正在运行的进程:"< 操作系统课程设计 班级: 姓名: 学号: 使用语言:C++ 指导老师: 学院: 一、系统要求 1、实验目的 通过一个简单多用户文件系统的设计,加深理解文件系统的内部功能及内部实现。 2、实验内容 为linux系统设计一个简单的二级文件系统。要求做到以下几点: (1)可以实现下列几条命令(至少4条); login 用户登陆 dir 列文件目录 create 创建文件 delete 删除文件 open 打开文件 close 关闭文件 read 读文件 write 写文件 (2)列目录时要列出文件名、物理地址、保护码和文件长度; (3)源文件可以进行读写保护。 二、系统分析 1、设计思想 本文件为二级文件系统,即要实现对文件的增删改查,同时又具备登陆系统、注册用户的功能,各个用户之间的文件系统互不干扰。 本文件系统采用两级目录,其中第一级对应于用户账号,第二级对应于用户帐号下的文件。另外,为了简便文件系统未考虑文件共享,文件系统安全以及管道文件与设备文件等特殊内容。 系统采用结构体来存储用户、文件目录、文件数据内容: 0 48*5 48*5+44*50 48*5+44*50+264*200 每个分区都是由结构体组成,每个个去的结构体的个数由格式化系统是决定。整个系统的编码构成主要分为: Allstruct.h 定义了每个分区的结构体; Mysys.h 声明了对系统操作的各种方法; Myuserfile.h 声明了对文件操作的各种方法; Mymain.cpp 整个系统的主函数,操作入口; Mysys.cpp 包含了mysys.h,实现了操作系统的各种方法;Myuserfile.cpp 包含了myuserfile.h,实现了操作文件的各种方法; 2、主要数据结构 Allstruct.h文件的内容: struct s_user //用户区结构体 { long isuse; //是否使用 char name[20]; //用户名 char psd[20]; //密码 long address; //目录地址 }; struct s_list //目录结构体 { long isuse; //是否使用 char name[20]; //文件名字 long myaddress; //本条目录地址 long pointaddress; //指向的文件的地址 long isfile; //是否锁定 long pointsize; //目标文件的大小 long nextaddress; //下条目录的地址 }; struct s_file //文件结构体 { long isuse; //是否使用 char content[256]; //文件内容 long next; //下个文件块地址 }; 南通大学计算机科学与技术学院操作系统课程设计报告 专业: 学生姓名: 学号: 时间: 操作系统模拟算法课程设计报告 设计要求 将本学期三次的实验集成实现: A.处理机管理; B.存储器管理; C.虚拟存储器的缺页调度。 设计流程图 主流程图 开始的图形界面 处理机管理存储器管理缺页调度 先来先服务时 间 片 轮 转 首 次 适 应 法 最 佳 适 应 法 先 进 先 出 L R U 算 法 A.处理机调度 1)先来先服务FCFS N Y 先来先服务算法流程 开始 初始化进程控制块,让进程控制块按进程到达先后顺序让进程排队 调度数组中首个进程,并让数组中的下一位移到首位 计算并打印进程的完成时刻、周转时间、带权周转时间 其中:周转时间 = 完成时间 - 到达时间 带权周转时间=周转时间/服务时间 更改计时器的当前时间,即下一刻进程的开始时间 当前时间=前一进程的完成时间+其服务时间 数组为空 结束 2)时间片轮转法 开始 输入进程总数 指针所指的进程是 否结束 输入各进程信息 输出为就绪状态的进程的信息 更改正在运行的进程的已运行时间 跳过已结束的程序 结束 N 指向下一个进程 Y 如果存在下一个进程的话 Y N 输出此时为就绪状态的进程的信息 时间片轮转算法流程图 B.存储器管理(可变式分区管理) 1)首次适应法 分配流程图 申请xkb内存 由链头找到第一个空闲区 分区大小≥xkb? 大于 分区大小=分区大小-xkb,修改下一个空闲区的后向指针内容为(后向指针)+xkb;修改上一个空闲区的前向指针为(前向指针)+xkb 将该空闲区从链中摘除:修改下一个空闲区的后向地址=该空闲区后向地址,修改上一个空闲区的前向指针为该空闲区的前向指针 等于 小于延链查找下 一个空闲区 到链尾 了? 作业等待 返回是 否 登记已分配表 返回分配给进程的内存首地址 开始 电气传动自动控制系统课程设计 学院:电气信息 专业:自动化 年级:2012级 小组成员:邓建儒 2012141441300 沙华 2012141441299 张政 2012141441326 陆啸 2012141441015 完成时间:2015年7月13日 指导教师:肖勇 直流双闭环调速系统设计 摘要:转速、电流反馈控制直流调速系统的设计主要是通过对直流双闭环调速系统中电流调节器(ACR)和速度调节器(ASR)的设计与调试,以达到给定系统静、动态性能指标。在实验中要通过实验装置中已有的参数来确定调节器的各个参数,在单元调试环节中,需要整定调节器ACR、ASR的运放输出限幅值,在系统调试环节中,需要对电流环和转速环进行整定。对于系统性能的测定,则需要对静态和动态性能分别做实验测试,在电压给定或者负载给定的情况下,分别对两种状态做性能分析。根据设计要求确定调速方案和主电路的结构型式,主电路和闭环系统确定下来后,实际设计中常采用转速、电流双闭环控制系统,一般使电流环(ACR)作为控制系统的内环,电流环应以跟随性能为主,即应选用典型Ⅰ型系统;转速环(ASR)作为控制系统的外环,以此来提高系统的动态和静态性能,因为转速环以抗扰性能为主,即应选用典型Ⅱ型系统为主,以此使电动机满足所要求的静态和动态性能指标。然后按照确定时间常数、选择调节器结构、计算调节器参数、校验近似条件的步骤一步一步的实现对调节器的具体设计。再对系统的启动过程进行分析,以了解系统的动态性能。之后,用Matlab软件中的Simulink模块对设计好的系统进行模拟仿真,得出仿真波形。最后给出参考资料和总结。 关键词:直流双闭环调速系统、电流调节器(ACR)、速度调节器(ASR)、调试、动态静态性能指标 目录 第一章 ..............................任务描述第二章 ..............................系统建模第三章 ..............................系统设计第四章 ..............................系统调试第五章 ..............................系统评价 机械手的控制方式及控制系统设计 机械手在工业科技中的应用时间较长,随着工业生产的不断发展进步,机械手的控制技术也得到了较为快速的发展。人们在很早以前就希望能够借助其他的工具替代人类自身的手去从事重复性的工作,或者具有一定危险性的工作,从而提高工业的生产效率,同时也能规避人们在生产实际生产中碰到的危险情况。此外,在一些特殊的场合中,必须要依靠机械手才能加以完成。未来机械手在工业生产中将发挥更大的作用,本文主要对机械手的控制方式及控制系统设计方法进行了较为详细的分析。 2 机械手原理概述 机械手具有很多的优点,比如机械手比人的手具有更大的力气,能够干很多人手所无法干的事情,这样也能提高工业生产中的效率,同时采用机械手进行工业生产时的成本相对而言也会得到一定程度上的降低。机械手通常由三部分组成,即机械部分,传感部分和控制部分。其中,手部安装在手臂的前端,用来抓持物件,这是执行机构的主体,可根据被抓持物件的形状、重量、材料以及作业要求不同而具有多种结构形式。控制部分包括控制系统和人机交互系统。对于机器人基本部件的控制系统,控制系统的任务是控制机械手的实际运动方式。 机械手的控制系统有开环和闭环两种控制方式,如果工业机械手没有信息反馈功能,那么它就是一个开环控制系统。如果有信息反馈功能,它是一个闭环控制系统。对于机器人基本组成的人机交互系统,人机交互系统是允许操作员参与机器人控制并与机器人通信的装置。总之,人机交互系统可以分为两类:指令给定装置和信息显示装置,机械手的控制主要是通过软件程序加以实现。随着科学技术的发展,机械手相关的技术也得到了快速的发展,先进的控制方式和先进的控制技术在机械手的控制领域中也具有一定的采用。现在机械手不仅广 操作系统课程设计实验报告 实验名称:进程控制 姓名/学号: 一、实验目的 学习、理解和掌握Linux与windows的进行控制系统调用的功能,熟悉主要的几个系统调用命令的格式和如何利用系统调用命令进行编程。通过学习,理解如何创建一个进程、改变进程执行的程序、进程和线程终止以及父子进程的同步等,从而提高对进程和线程控制系统调用的编程能力。 二、实验内容 设计并实现Unix的“time”命令。“mytime”命令通过命令行参数接受要运行的程序,创建一个独立的进程来运行该程序,并记录程序运行的时间。 三、实验环境 CPU: Inter ×2 2.10GHz RAM: 3.00GB Windows 7 旗舰版 Linux Ubuntu 10.04 编译: VS2010 四、程序设计与实现 4.1进程控制系统的调用 4.1.1 windows进程控制调用程序中使用的数据结构及主要符号说明 SYSTEMTIME starttime,endtime; //进程开始时间和结束时间 PROCESS_INFORMATION pi //该结构返回有关新进程及 //其主线程的信息 STARTUPINFO si //该结构用于指定新进程的主窗口特性4.1.2 linux进程控制调用程序中使用的数据结构及主要符号说明 struct timeval starttime,endtime //进程开始时间和结束时间 pid_t pid //进程标志符 4.2 程序流程图 图1 windows进程控制调用图2 linux进程控制调用程序运行流程图程序运行流程图 五、实验结果和分析 5.1 windows实验结果和分析 学年论文(课程设计)题目:操作系统课程设计 学院数学与计算机学院 学科门类工学 专业网络工程 学号 姓名 指导教师王煜 年月日 河北大学学年论文(课程设计)任务书 (指导教师用表) 指导教师签字: 系主任签字: 主管教学院长签字: 装 订 线 河北大学学年论文(课程设计)成绩评定表学院:数学与计算机学院 装 订 线 摘要 此系统实现了存储管理、设备管理和进程管理。 存储管理部分主要实现主存空间的分配和回收。存储管理采用可移动的可变分区存储管理方式。采用数组来模拟主存,大小为512个字节。 设备管理主要包括设备的分配和回收。模拟系统中有A、B、C三种独占型设备,A设备3个,B设备2个,C设备1个。设备分配时采用采用先来先服务策略。设备回收时唤醒等待设备的进程。 进程管理主要包括进程调度,进程的创建和撤销、进程的阻塞和唤醒,中断作用的实现。其中硬件中的中央处理器用不断循环的函数CPU( )模拟,重要寄存器(如:程序状态寄存器PSW、指令寄存器IR)用全局变量模拟,中断的发现是在函数CPU中加检测PSW 的方式来模拟,时钟的模拟通过timer控件实现。进程控制块的模拟通过数组,本系统最多容纳10个。进程调度时采用时间片轮转调度算法,时间片为5。 关键词:存储管理设备管理进程管理时间片 ABSTRACT The system has storage management, equipment management and process management. The storage management has achieved the allocation and recovery of the main memory space. Variable storage management is used as storage management .We simulate the main memory by array, whose size is 512 bytes. The device management, including the distribution and recovery of devicet. We simulate three devices ,A,B,C. the numbers of them are 3,2,1. The distribution of device used to adopt first-come first-service strategy. It awakes the blocking process when the device is recycled. The process management, including scheduling ,creating revocation ,blocking and waking up the process, the realization of the interruption.We simulate the central processing unit by the cycling function named CPU(),simulate the important register by global variable, simulate the recovering of interruption by checking PSW in the function of CPU(),simulate the clock by the timer control. The simulation of the process control block by array, whose number is up to 10. When the scheduling of the process happens, we use the algorithm of time piece rotation scheduling, and the time piece is 5. Key words: storage device process time操作系统课程设计
基于PLC的啤酒发酵自动控制系统设计课程设计(论文)
机械手运动控制系统设计
操作系统课程设计报告
自动控制原理课程设计报告
操作系统课程设计报告
PLC机械手操作控制系统
操作系统课程设计报告
自动控制设计(自动控制原理课程设计)
操作系统课程设计报告
自动控制原理课程设计
操作系统课程设计报告
操作系统课程设计(文件系统)
操作系统(一个小型操作系统的设计与实现)课程设计
电气传动自动控制系统课程设计大学论文
机械手的控制方式及控制系统设计
操作系统课程设计报告
操作系统课程设计论文