大型机械手市场需求
2020年大数据行业发展报告出炉
2020年大数据行业发展报告出炉 马云曾经说过一句话,当今以及未来的世界当中,最珍贵的能源就是大数据。随着云计算和大数据技术的兴起和快速发展,大数据 技术应用已经融入到了各行各业。很多公司已经从大数据中获益。 大数据不仅运用在财务核算上,更能在从研发到采购、生产、物流、营销、客户、订单管理等等一系列企业运营上发挥作用。借助 数据管理,企业不仅可以有效预估和分析管理效果,而且还能为企 业在战略问题,资源整合问题,业务拓展提供决策依据。因此大数 据产业的发展将可以几大的促进企业的进步,实现跨时代的变革。 2016-2021年大数据行业深度分析及“十三五”发展规划指导报 告认为,2017年大数据行业将呈现六大趋势: 1.将会推出更多的分析工具 随着数据量的不断增长,数据分析方法也将进一步提高。虽然SQL依然会是数据分析的标准方法,但是新兴分析工具也不可小觑。Spark是其中之一,它是大数据时代下的一个快速处理数据分析工 作的框架,多家世界顶级的数据企业例如Google,Facebook等现已 纷纷转向Spark框架。 这些新兴分析工具操作简单,对用户没有任何编码知识要求。Microsoft和Salesforce都已经推出了新型分析工具,MicrosoftRServer和LightningCRM平台,非编码人员也可以创建 应用程序来查看数据。 2.实时数据分析将获得更多关注 技术专家预测,2017年企业将需要实时数据分析工具,来帮助 他们利用数据进行实时决策。实时计算一般都是针对海量数据进行的,一般要求为秒级。目前有几款数据分析工具可以提供实时访问 数据,如GoogleAnalytics和Clicky。
机械手文献综述
燕山大学 本科毕业设计(论文)文献综述 课题名称:顺序动作机械手 学院(系):机械工程学院 年级专业:机电控制 学生姓名:杨忠合 指导教师:郑晓军 完成日期: 2014.03.25
一、课题国内外现状 目前国内机械于主要用于机床加工、铸锻、热处理等方面,数量、品种、性能方面都不能满足工业生产发展的需要。所以,在国内主要是逐步扩大应用范围,重点发展铸造、热处理方面的机械手,以减轻劳动强度,改善作业条件,在应用专用机械手的同时,相应的发展通用机械手,有条件的还要研制示教式机械手、计算机控制机械手和组合机械手等。同时要提高速度,减少冲击,正确定位,以便更好的发挥机械手的作用。此外还应大力研究伺服型、记忆再现型,以及具有触觉、视觉等性能的机械手,并考虑与计算机连用,逐步成为整个机械制造系统中的一个基本单元。 国外机械手在机械制造行业中应用较多,发展也很快。目前主要用于机床、横锻压力机的上下料,以及点焊、喷漆等作业,它可按照事先指定的作业程序来完成规定的操作。国外机械手的发展趋势是大力研制具有某种智能的机械手。使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。如位置发生稍许偏差时,即能更正并自行检测,重点是研究视觉功能和触觉功能。目前已经取得一定成绩。目前世界高端工业机械手均有高精化,高速化,多轴化,轻量化的发展趋势。定位精度可以满足微米及亚微米级要求,运行速度可以达到3M/S,量新产品达到6轴,负载2KG的产品系统总重已突破100KG。更重要的是将机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。同时,随着机械手的小型化和微型化,其应用领域将会突破传统的机械领域,而向着电子信息、生物技术、生命科学及航空航天等高端行业发展。 二、研究主要成果 机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。 搬运机械手仿真设计和制作,机械手的机械结构主要包括由两个电磁阀控制的气缸来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的进退运动,并利用ADAMS 软件对搬运机械手进行建模,对其进行运动学及动力学仿真,
机械手调查报告
关于机械手的调查了解 机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 它是在早期出现的古代机器人基础上发展起来的,机械手研究始于20世纪中期,随着计算机和自动化技术的发展,特别是1946年第一台数字电子计算机问世以来,计算机取得了惊人的进步,向高速度、大容量、低价格的方向发展。同时,大批量生产的迫切需求推动了自动化技术的进展,又为机器人的开发奠定了基础。另一方面,核能技术的研究要求某些操作机械代替人处理放射性物质。在这一需求背景下,美国于1947年开发了遥控机械手,1948年又开发了机械式的主从机械手。机械手首先是从美国开始研制的。1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1958年美国联合控制公司研制出第一台机械手铆接机器人。作为机器人产品最早的实用机型(示教再现)是1962年美国AMF公司推出的?VERSTRAN?和UNIMATION公司推出的?UNIMATE?。 机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。 机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。我国塑料机械已成为机械制造业发展最快的行业之一,年需求量在不断的
大数据发展前景及发展战略分析
大数据,又称巨量资料,指的是所涉及的数据资料量规模巨大到无法通过人脑甚至主流软件工具,在合理时间内达到撷取、管理、处理、并整理成为帮助企业经营决策更积极目的的资讯。 大数据的特点 数据量大、数据种类多、 要求实时性强、数据所蕴藏的价值大。在各行各业均存在大数据,但是众多的信息和咨询是纷繁复杂的,我们需要搜索、处理、分析、归纳、总结其深层次的规律。 大数据的采集 科学技术及互联网的发展,推动着大数据时代的来临,各行各业每天都在产生数量巨大的数据碎片,数据计量单位已从从Byte、KB、MB、GB、TB发展到PB、EB、ZB、YB甚至BB、NB、DB来衡量。大数据时代数据的采集也不再是技术问题,只是面对如此众多的数据,我们怎样才能找到其内在规律。 大数据的挖掘和处理
大数据必然无法用人脑来推算、估测,或者用单台的计算机进行处理,必须采用分布式计算架构,依托云计算的分布式处理、分布式数据库、云存储和虚拟化技术,因此,大数据的挖掘和处理必须用到云技术。 大数据的应用 大数据可应用于各行各业,将人们收集到的庞大数据进行分析整理,实现资讯的有效利用。举个本专业的例子,比如在奶牛基因层面寻找与产奶量相关的主效基因,我们可以首先对奶牛全基因组进行扫描,尽管我们获得了所有表型信息和基因信息,但是由于数据量庞大,这就需要采用大数据技术,进行分析比对,挖掘主效基因。例子还有很多。 大数据的意义和前景 总的来说,大数据是对大量、动态、能持续的数据,通过运用新系统、新工具、新模型的挖掘,从而获得具有洞察力和新价值的东西。以前,面对庞大的数据,我们可能会一叶障目、可见一斑,因此不能了解到事物的真正本质,从而在科学工作中得到错误的推断,而大数据时代的来临,一切真相将会展现在我么面前。
机械手开题报告
机械手开题报告 附表6: 郑州科技学院毕业设计(论文)开题报告课题名称直角坐标机械手结构设计与仿真 课题来源教师拟定课题类型 AY 指导教师张晓莹学生姓名高齐学号201033010 专业机械设计制造及自动化一、研究背景、概况及意义 1.背景及概况: 工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。 机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。国内外机械手在机械制造行业中应用较多,发展也很快。目前主要用于机床、横锻压力机的上下料,以及点焊、喷漆等作业,它可按照事先指定的作业程序来完成规定的操作。国外机械手的发展趋势是大力研制具有某种智能的机械手。使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。现今世界高端工业机械手均有高精化,高速化,多轴化,轻量化的发展趋势。定位精度可以满足微米以
及亚微米级要求,运行速度可以达到3m/s,量新产品达到6轴,负载2Kg的产品系统总重已突破100Kg。更重要的是将机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。同时,随着机械手的小型化和微型化,其应用领域将会突破传统的机械领域,而向着电子信息、生物技术、生命科学及航空航天等高端行业发展。 2.选题意义: 1)可以提高生产过程的自动化程度 应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。 2)可以改善劳动条件、避免人身事故 在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其它毒性污染以及工作空间狭窄等场合中,用人手直接操作是有危险或根本不可能的。而应用机械手即可部分或全部代替人安全地完成作业,大大地改善了工人的劳动条件。同时,在一些动作简单但又重复作业的操作中,以机械手代替人手进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。 3)可以减少人力,便于有节奏的生产 应用机械手代替人手进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续地工作,这是减少人力的另一个侧面。因此,在自动化机床和综合加工自动生产线上目前几乎都设有机械手,以减少人力和更准确地控制生产的节拍,便于有节奏地进行生产。二、研究主要内容 practices. The development of various undertakings, requires each party to pay and hard work. No free ride thing under the Sun, if you cannot play a vanguard and exemplary role of party members is unworthy
机械手的研究现状和发展趋势
机械手的研究现状和发展趋势概述及现状: 机械手是一种模拟人手操作的自动机械。它可按固定程序抓取、搬运物件或操持工具完成某些特定操作。应用机械手可以代替人从事单调、重复或繁重的体力劳动,实现生产的机械化和自动化,代替人在有害环境下的手工操作,改善劳动条件,保证人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 20世纪40年代后期,美国在原子能实验中,首先采用机械手搬运放射性材料,人在安全间操纵机械手进行各种操作和实验。50年代以后,机械手逐步推广到工业生产部门,用于在高温、污染严重的地方取放工件和装卸材料,也作为机床的辅助装置在自动机床、自动生产线和加工中心中应用,完成上下料或从刀库中取放刀具并按固定程序更换刀具等操作。 机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需
有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。 机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。 机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。 发展前景及方向: 1 重复高精度 精度是指机器人、机械手到达指定点的精确程度, 它与驱动器的分辨率以及反馈装置有关。重复精度是指如果动作重复多次, 机械手到达同样位置的精确程度。重复精度比精度更重要, 如果一个机器人定位不够精确, 通常会显示一个固定的误差, 这个误差是可以预测的, 因此可以通过编程予以校正。重复精度限定的是一个随机误差的范围, 它通过一定次数地重复运行机器人来测定。随着微电子技术和现代控制技术的发展,机械手的重复精度将越来越高, 它的应
大数据市场前景如何
随着云时代的来临,大数据(Big data)也吸引了越来越多的关注。《著云台》的分析师团队认为,大数据(Big data)通常用来形容一个公司创造的大量非结构化和半结构化数据,这些数据在下载到关系型数据库用于分析时会花费过多时间和金钱。大数据分析常和云计算联系到一起,因为实时的大型数据集分析需要像MapReduce一样的框架来向数十、数百或甚至数千的电脑分配工作。 简言之,从各种各样类型的数据中,快速获得有价值信息的能力,就是大数据技术。明白这一点至关重要,也正是这一点促使该技术具备走向众多企业的潜力。大数据的4个“V”,或者说特点有四个层面:第一,数据体量巨大。从TB级别,跃升到PB级别;第二,数据类型繁多。前文提到的网络日志、视频、图片、地理位置信息等等。第三,价值密度低。以视频为例,连续不间断监控过程中,可能有用的数据仅仅有一两秒。第四,处理速度快。1秒定律。最后这一点也是和传统的数据挖掘技术有着本质 的不同。业界将其归纳为4个“V”——Volume,Variety,Value,Velocity。物联网、云计算、移动互联网、车联网、手机、平板电脑、PC以及遍布地球各个角落的各种各样的传感器,无一不是数据来源或者承载的方式著云台 例子包括网络日志,RFID,传感器网络,社会网络,社会数据(由
于数据革命的社会),互联网文本和文件;互联网搜索索引;呼叫详细记录,天文学,大气科学,基因组学,生物地球化学,生物,和其他复杂和/或跨学科的科研,军事侦察,医疗记录;摄影档案馆视频档案;和大规模的电子商务。 大的数据需要特殊的技术,以有效地处理大量的容忍经过时间内的数据。适用于大数据的技术,包括大规模并行处理(MPP)数据库,数据挖掘电网,分布式文件系统,分布式数据库,云计算平台,互联网,和可扩展的存储系统。 一些但不是所有的MPP的关系数据库的PB的数据存储和管理的能力。隐含的负载,监控,备份和优化大型数据表的使用在RDBMS的。 斯隆数字巡天收集在其最初的几个星期,比在天文学的历史,早在2000年的整个数据收集更多的数据。自那时以来,它已经积累了140兆兆字节的信息。这个望远镜的继任者,大天气巡天望远镜,将于2016年在网上和将获得的数据,每5天沃尔玛处理超过100万客户的交易每隔一小时,反过来进口量数据库估计超过2.5 PB的是相当于167次,在美国国会图书馆的书籍。 FACEBOOK处理400亿张照片,从它的用户群。解码最初的人类基因组花了10年来处理时,现在可以在一个星期内实现。
机械手生产厂家排名
随着智能装备的高速发展,工业机器人在全球制造业中的优势和作用也越来越大。同时,无论是工业4.0还是全球企业的智能转型,工业机器人都是处于急先锋的位置。而对于我国,早已经成为全球最大的工业机器人市场,各种机器人公司如雨后春笋般涌现,而真正在工业机器人领域执牛耳者却是下面这些巨头,以下排名不分先后,仅供大家学习了解,而对于中国工业机器人企业,我们的路还很长。 1、发那科(FANUC) fanuc公司又名发那科公司,是当今世界上数控系统科研、设计、制造、销售实力强大的企业,是世界上最大的专业生产数控装置和机器人、智能化设备的着名厂商。该公司技术领先,实力雄厚,为当今世界工业自动化事业做出了重要贡献。自1974年,发那科首台机器人问世以来,发那科致力于机器人技术上的领先与创新,是世界上唯一一家由机器人来做机器人的公司。发那科机器人广泛应用在装配、搬运、焊接、铸造、喷涂、码垛等不同生产环节。发那科数控系统,占据了全球70%的市场份额,是名不虚传的世界第一,稳坐工业机器人四大家族头把交椅。 2、库卡(KUKA) 库卡(kuka)位于德国巴伐利亚州的奥格斯堡,是世界领先的工业机器人制造商之一,库卡的客户主要分布于汽车工业领域,在其他领域中也处于增长势头。库卡机器人公司是全球汽车工业中工业机器人领域的三家市场龙头之一,在欧洲则独占鳌头。库卡被美的收购部分股份后吸引了大量的中国关注,也被中国民众所熟知,相信库卡先进技术的底蕴加上中国市场的巨大,未来发展会更快。 3、爱普生
爱普生源于1982年精工手表的组装线,在机器人领域,爱普生已有30年的研发和应用,是技术和运用都是世界领先的水平,世界各地许多顶级企业每天借助爱普生工业机器人的产品降低生产成本、提高产品质量、增加产量,并增加收益。爱普生机器人有广泛应用于制造业的各个环节,在3C电子(计算机、通讯、消费电子)、医疗、食品、太阳能、工业制造等行业,均可以见到爱普生机器人的身影。如进行组装、机加工、检测、包装、阵列、分配、锁螺丝、焊接、贴标、层压等工艺。 4、川崎 川崎重工是日本的着名企业,到目前为止已在国际上销售了约5万台各类工业机器人,川崎机器人在物流生产线上提供了多种多样的机器人产品,在饮料、食品、肥料、太阳能、炼瓦等各种领域中都有非常可观的销量。川崎的码垛搬运等机器人种类繁多,针对客户工场的不同状况和不同需求提供最适合的机器人、最专业的售后服务和最先进的技术支持。 5、新松(SIASUN) 在全球最大的工业机器人市场中国,怎么能少了中国工业机器人公司的代表——新松,新松以机器人及自动化技术为核心,致力于数字化高端装备制造的高技术企业,在工业机器人、智能物流、自动化成套装备、洁净装备、激光技术装备、轨道交通、节能环保装备、能源装备、特种装备及智能服务机器人等领域呈产业群组化发展。现已成为中国最大的机器人产业化基地。 6、大正百恒 芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的机械手,类型丰富,控制精度高,性能优异,价格实惠,是您
机械手项目经营分析报告(项目总结分析)
机械手项目经营分析报告 规划设计 / 投资分析
第一章项目总体情况说明 一、经营环境分析 1、工业是立市治本,强市之基,当前我市工业发展处于工业化起步阶段,推进工业高质量发展是我市实现跨越发展必然趋势,也是关键路径, 是全市经济高质量发展的重大举措。着力培育发展新产业、新业态、新模式,支持传统产业改造升级,加快发展先进制造业和现代服务业,瞄准国 际先进标准提高产业发展水平,促进产业优势互补、紧密协作、联动发展,培育若干世界级产业集群。我市的工业化仍处初期阶段,是做大增量和高 质量发展的关键时期,全市工业发展滞后,未完全发挥社会经济发展的主 要作用,低端低位发展的特征明显,依赖资源、发展方式粗放、创新能力弱、动能不足等问题突出。进入新时代、面对新机遇和挑战,全面实施 “工业强市”战略,推进工业高质量发展既是对那坡县工业发展形势的情 形认识,又是改变现状的具体表现。 2、当前全球正处于新一轮科技革命和产业变革孕育兴起的关键时期, 智能技术、生物技术、新材料技术等重大创新加快突破,“互联网+”及“+互联网”深入各行各业,以新技术、新产品、新业态、新商业模式为 代表的“新经济”成为经济发展的新动能。新一轮产业革命将更多呈现出 区域协同、分享经济的特征,为我市工业加入弯道超车行列提供良好机遇。本市的工业发展和园区的规划建设起步晚,加以本市山地丘陵缺乏整块的
大面积空间用于工业开发,故而形成了本市现在的巨屿、百丈漈、黄坦三 大工业基地分散布局、逐次开放的格局。虽然是逐次开发,但三个小而分 散的基地都是独立规划发展,由于历来都缺少强有力的组织领导,各基地 规划和建设投入的力度都不足,这也进一步加大了本市的工业招商工作的 难度。因此本市工业项目的引进历来都是一种被动接受的行为过程,导致 工业的发展并未按政府所规划、所希望的方向前进。 3、当全球新科技革命和产业革命又来到一个新的历史性选择关头,中 国战略性新兴产业除了激烈外部竞争压力,内部同样面临许多严重的问题。一是产业发展的制度和体制障碍需要进一步理顺,财政金融政策支持、资 源倾斜优先配置等具体落实措施和政策没有完善。二是面对发达国家的技 术垄断壁垒,技术创新进步还需要加大原始积累,关键和核心技术领域优 势不明显,自主创新能力不强,技术研发、转化利用效率不高。三是光伏、风电等个别产业领域出现产能难以消化过剩问题。我国正处于经济结构深 度调整时期,战略性新兴产业对经济发展的支撑作用日益增强。2016年, 我国战略性新兴产业呈现总量规模增长快、技术突破赶超快、具有优势的 企业和行业发展进一步加速、产业集聚特色突出、中央和地方政策措施密 集出台、融资环境有所改善的总体态势,但仍存在研发投入需增加、资金 支持力度需加大等问题,同时八大细分产业发展各具特点。 推进新一轮支持民企政策加快落地,切实减轻工业企业税费负担,增 强企业盈利能力,提振企业发展信心。加快推进民营经济税收优惠、优化
国产机械手厂家
由于经济性“剪刀差”促进了企业自发进行自动化改造,随着机械行业重要的下游需求持续爆发,国家高层扶持工业机器人意志坚定,机械手市场高速增长,且国际机械巨头垄断中高端市场,使得国产机械厂商充分享受行业爆发红利,我国工业机械手爆发是必然趋势。 在目前我国工业机器人企业普遍缺乏核心技术,难以与国际巨头进行正面竞争。当前我国机器企业有两大模式,一是以新松机器人为代表的全方位布局、坚持研发导向、紧握核心技术的“新松模式”,二是以拓斯达为代表的从难度较低的系统集成切入,利用贴近市场、贴近客户的优势不断实现技术迭代,最终带动本体、核心零部件业务突破的“拓斯达模式”。新松模式有国家、科研院所与高校的大力支持,也有国内龙头企业积极应用响应的渠道优势;拓斯达模式有反应迅速、客户粘性高、盈利能力强的优势。两种模式在国内可以与四大家族进行不同维度的竞争,具有较强的竞争优势。 工业机器人属于政策性行业,政策驱动是主要发展动力。当前我国工业机器人产业在人力成本上升、工业机器人价格下降、政策推动的三重驱动力力下发展,人力成本与机器人成本的剪刀差能够有效地推动企业自发地谋求自动化改造,工业自动化普及是自下而上和自上而下共同推动的过程。 虽然道路曲折布满荆棘,但好在还是有人在砥砺前行,芜湖大正百恒智能装备有限公司就是在不断的探索中总结经验,积极像外国学习先进的技术和引进先进的设备,终于能够在机械制造业中有了一席之地,目前已经是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机
大数据行业的发展前景
某招聘网站资深HR对此表示,纵观当前招聘市场,无论是比较火爆的互联网行业还是传统行业,技能型人才都是非常受欢迎的人才之一,那些拥有职场一技之能的跳槽者往往跳的结果更好,包括薪酬和发展空间、重视程度等。 无论你是怎样的文化水平,请不要气馁,因为现实不会可怜没有追求的人。即便是文化水平低也要继续学习从而提高自己的个人素养,因此,学习一门适应社会发展的技术是比较靠谱的选择。 据统计,2012年,全球大数据市场总体规模约为114亿美元;而到2016年时,全球大数据硬件、软件和服务整体市场同比增长22%,达到437亿美元。虽然全球经济持续放缓,但大数据市场的增长趋势不会受到影响。预计到2022在大数据硬件、软件和服务上的整体开支的复合年增长率为12%,将达到大约952亿美元,潜力巨大。 其中,在专业服务市场中,应用数据库增加了分析数据库的功能,2016年这个细分领域的总规模为26亿美元,到2020年增幅放缓到30%达到77亿美元;分析数据库中,MPP SQL数据库将继续变革,到2020年达到38亿美元;物联网应用作为大数据应用的基础,到2020年将增长到18亿美元;机器学习应用到2020年它将赶超其他所有大数据细分市场,规模达到63亿美元;总体来说,到2022年,全球大数据专业服务市场规模有望达到296亿美元。 60分万岁让很多计算机专业的同学根本就没有学到什么实用技术,甚至理论知识都掌握的非常薄弱。你说,这样的状态如何让企业给予高薪?甚至就业机会都不想给。" 北大青鸟上海校区在完成一段学业之后,会获得相应的(国际)软件工程师的认证,学员可以凭证书先寻找工作,边工作边学习,很大程度上解决了学员的就业难题。
机械手是未来发展的趋势
机械手是未来发展的趋势 进入21世纪以来,随着经济的发展和社会的进步,世界各国日益重视科技的发展。在我国自实行科教兴国战略以来,科学技术发展迅速,工业上机械手代替人工的数量逐渐增多。 机械手是能模仿人手和 臂的某些动作功能,用 以按固定程序抓取、搬 运物件或操作工具的自 动操作装置。机械手也 称机器人,它可代替人 的繁重劳动以实现生产 的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、轻工、电子和原子能等行业。 近年来,在市场普遍低迷的态势下,我国工程机械行业面临着人口红利消失、用工成本大幅上涨的不利局面,“用工荒”、“高成本”等因素交织叠加在一起,压缩了制造企业的盈利空间,凸显了当前业内中小企业的生存困境,同时也促使有潜质、有能力的企业在转型升级的阵痛中寻找新出路。中国工程机械行业正面临着向高端转变、承接国际先进制造、参与国际分工的巨大挑战,“机器换人”已是大势所趋。 为什么机械手会成为未来发展趋势呢?综合各方面因素考虑,最
主要有以下两个原因。 一、国家政府出台的政策支持 国家出台一系列机械手产业扶持政策为机械手发展提供了政策支持保障。2013年,工信部发布的《关于推进工业机器人产业发展的指导意见》指出,到2020年须形成完善的工业型机器人产业体系、高阶产品市场占有率提高到45%以上、机器人密度(每万名工人所拥有的工业机器人数量)由目前的约21达到100以上等,这意味着国家推动工业型机器人的数量将在未来6年成长约4倍。 二、机械手代替人工优势突出 1、节省人工、节约成本 随着现在中国新劳动法的推出,工人工资的不断上涨,工人的流动性越来越高,企业将来的缺工问题会越来越严重,机械手可以节省工人,防止工人流动,提升工人的素质,保证更好的工作品质,同时又能节约生产成本。 2、生产效率高 与人工相比,机械手可以长时间工作而不会出现疲劳作业造成产品交期的延误,效率高。 3、灵活、安全 机械手能代替人工在恶劣的环境下进行工作,东莞合辉机械手具有双重锁模安全保护,确保机械手取物安全,也可防止工人作业不慎造成工伤;且机械手产品取出确认,可防止产品取出不良压伤模具。
全球十大工业机器人品牌
全球十大工业机器人品牌 随着智能装备的发展,机器人在工业制造中的优势越来越显着,机器人企业也如雨后春笋般的出现。然而占据主导地位的还是那些龙头企业。 1.发那科(FANUC) FANUC(发那科)是日本一家专门研究数控系统的公司,成立于1956年。是世界上最大的专业数控系统生产厂家,占据了全球70%的市场份额。FANUC1959年首先推出了电液步进电机,在后来的若干年中逐步发展并完善了以硬件为主的开环数控系统。进入70年代,微电子技术、功率电子技术,尤其是计算技术得到了飞速发展,FANUC公司毅然舍弃了使其发家的电液步进电机数控产品,一方面从GETTES公司引进直流伺服电机制造技术。 1976年FANUC公司研制成功数控系统5,随后又与SIEMENS公司联合研制了具有先进水平的数控系统7,从这时起,FANUC公司逐步发展成为世界上最大的专业数控系统生产厂家。 自1974年,FANUC首台机器人问世以来,FANUC致力于机器人技术上的领先与创新,是世界上唯一一家由机器人来做机器人的公司,是世界上唯一提供集成视觉系统的机器人企业,是世界上唯一一家既提供智能机器人又提供智能机器的公司。FANUC机器人产品
系列多达240种,负重从0.5公斤到1.35吨,广泛应用在装配、搬运、焊接、铸造、喷涂、码垛等不同生产环节,满足客户的不同需求。 2008年6月,FANUC成为世界第一个突破20万台机器人的厂家;2011年,FANUC 全球机器人装机量已超25万台,市场份额稳居第一。 2.库卡(KUKA) 库卡(KUKA)及其德国母公司是世界工业机器人和自动控制系统领域的顶尖制造商,它于1898年在德国奥格斯堡成立,当时称“克勒与克纳皮赫奥格斯堡(KellerundKnappi chAugsburg)”。公司的名字KUKA,就是KellerundKnappichAugsburg的四个首字母组合。在1995年KUKA公司分为KUKA机器人公司和KUKA库卡焊接设备有限公司(即现在的KUKA制造系统),2011年3月中国公司更名为:库卡机器人(上海)有限公司。 KUKA产品广泛应用于汽车、冶金、食品和塑料成形等行业。KUKA机器人公司在全球拥有20多个子公司,其中大部分是销售和服务中心。KUKA在全球的运营点有:美国,墨西哥,巴西,日本,韩国,台湾,印度和欧洲各国。
文献综述(机械手)
文献综述题目机械手概述 学院专业班级学号学生姓名任课教师
一.前言部分: 1.前言 随着科学与技术的发展, 机械手的应用领域也不断扩大.目前, 机械手不仅应 用于传统制造业如采矿,冶金,石油,化学,船舶等领域,同时也已开始扩大到核能,航空,航天,医药,生化等高科技领域以及家庭清洁,医疗康复等服务业领域中.如,水下机器人,抛光机器人,打毛刺机器人,擦玻璃机器人,高压线作业机器人,服装裁剪机器人,制衣机器人,管道机器人等特种机器人以及扫雷机器人,作战机器人,侦察机器人,哨兵机器人,排雷机器人,布雷机器人等军用机器人都是机械手应用的典型。机械手广泛应用于各行各业.而且,随着人类生活水平的提高及文化生活的日益丰富多彩,未来各种专业服务机器人和家庭用消费机器人将不断贴近人类生活,其市场将繁荣兴旺。 2.相关概念 机械手是一种模拟人手操作的自动机械。它可按固定程序抓取、搬运物件或操持工具完成某些特定操作。应用机械手可以代替人从事单调、重复或繁重的体力劳动,实现生产的机械化和自动化,代替人在有害环境下的手工操作,改善劳动条件,保证人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 20世纪40年代后期,美国在原子能实验中,首先采用机械手搬运放射性材料,人在安全间操纵机械手进行各种操作和实验。50年代以后,机械手逐步推广到工业生产部门,用于在高温、污染严重的地方取放工件和装卸材料,也作为机床的辅助装置在自动机床、自动生产线和加工中心中应用,完成上下料或从刀库中取放刀具并按固定程序更换刀具等操作。 二.主题部分: 1.历史 它是在早期出现的古代机器人基础上发展起来的,机械手研究始于20世纪中期,随着计算机和自动化技术的发展,特别是1946年第一台数字电子计算机问世以来,计算机取得了惊人的进步,向高速度、大容量、低价格的方向发展。同时,大批量生产的迫切需求推动了自动化技术的进展,又为机器人的开发奠定了基础。另一方面,核能技术的研究要求某些操作机械代替人处理放射性物质。在这一需求背景下,美国于1947年开发了遥控机械手,1948年又开发了机械式的主从机械手。 机械手首先是从美国开始研制的。1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1958年美国联合控制公司研制出第一台机械手铆接机器人。作为机器人产品最早的实用机型(示教再现)是1962年美
注塑机机械手
注塑机机械手 注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到及其重要的作用。 一、注塑机械手分类 在注塑工业中适用的机械手按其智能程度可以分为以下两种类型: 1、基本型注塑机械手:该类型机械手一般包括固定模式程序和按生产工艺需求的教导模式程序。固定模式程序涵盖了目前注塑生产的几种标准工艺,利用工业控制器来做简单、规则和重复的动作。教导模式程序是特意为生产工艺特殊的注塑机适用,通过把基本动作的有序而安全的编排达到成功取物的目的。 2、智能型注塑机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,一般采用伺服驱动,能够进行最大限度的仿人执行比较复杂的操作,还可以通过配备先进的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能。 二、日本注塑机机械手发展趋势: 由于注塑机专用机械手能够大幅度的提高生产率和降低生产成本,机械手能够稳定和提高注塑产品的质量,机械手避免因人为的操作失误而造成的损失。因此,注塑机械手在注塑生产中的作用变得越来越重要。目前国内的机械手类型比较简单,且大都用于取件。随着注塑成型工业的发展,以后将有越来越多的机械手用于上料、混合、自动装卸模具、回收废料等各个工序上,而且将朝着智能化方向发展。 三、市场注胶机械手的品牌 德国:肖根福罗格(Scheugenpflug)、RAMPF、Sonderhoff等 美国:EFD、飞士能、Asymtek、CAMALOT 等 亚洲:韩国MARO、特盈自动化、世椿、武藏MUSASHI、 IEI、LILE、等 中国:深圳世椿、厦门特盈自动化、昆山沃椿、深圳奥松、广州大创等等 四、注塑机如何配置机械手 大型横走机
浅谈机械手及其应用与发展前景
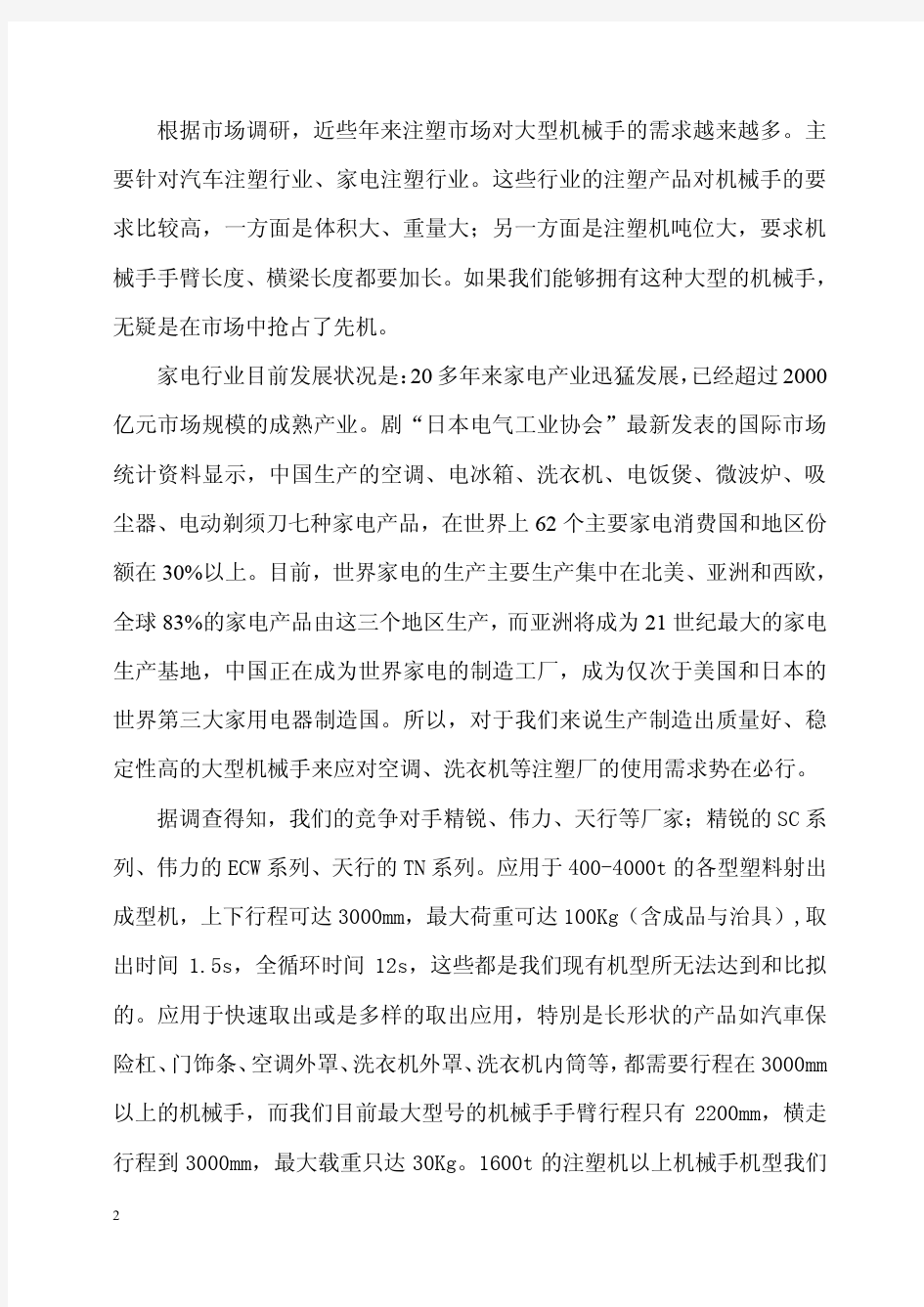
2—手II 上下播动油缸 31臂左右转动油ft 4—乎臂上下樣动机械反嫌#置 S —坊尘軍 6— 手《a 转及手指握s 油*I 7— 手臂前后伸缩机械K 後鼓* 手脅前e 伸缩油魟 手騫上下摆动s 转油缸 10-手臃上下播动机?5供酱* 11一电气控?麴置 12-*?#* 洗谈机械手及其启用与发展箭景 .? 韩梦丹,部晓宇 (西南交通大学,四川成都611756) 摘要:在现代工业生产中,生产过程的机械化、自动化已经成为突出的主题。有效应用机械手,则是发展机 械行业的必然趋势。文章在介绍机械手结构组成及工作原理的基础上,概述其应用及发展前景。 关键词:机械手;应用;发展前景 中图分类号:TH 138 文献标识码:A 文章编号:1006-8937(2012)02-0079-02 随着现代化工业的不断发展以及生产过程机械化和 自动化 水平的提升,工业机械手凭借其自身显著的特点 得到了广泛应用。如:应用机械手可以减轻劳动强度、提 高产品质量、改善劳动条 件,避免人身事故的发生,在高 温、高压、低温、低压、有灰尘、噪声、和有放射性以及毒性 污染的恶劣环境中,应用机械手可以部分或全部地替代 人来安全地完成作业,有节奏地进行生产等。其在机械加 工行业中的应用大大提高了生产效率,节省劳动力成本 达50%以上。 1机械手结构组成及其工作原理 机械手是一种能按给定的程序或要求,自动地完成 物件(如材料、工件、零件或工具等)传送或操作作业的机 械装置,它能部分地替代人的手工劳动。较高级形式的机 械手,还能模拟人的手臂动作,完成复杂的作业。 机械手主要由抓取机构、传送机构、驱动部分、控制 机构 以及行程检测装置、传感装置等部分组成。其各部分 之间的相互关系如图1所示。 瞠勒部翅二:丨-—II ■鹽癸卜?1-行搜险测装簟 i f i l t -r|ni J 图i 机械手的组成及其相互关系 抓取机构对物件抓取和放置,它包括了手指与传力 机构等。传送机构可以改变物件的方位。驱动部分负责为 抓取、传送两机构提供驱动,常用形式有液压、气压、电力 和机械驱动等,其中,电力驱动采用较少,机械驱动则一 般用于简易机械手,液压驱动和气压驱动方式占据了较 大比例。气压驱动结构简单、压缩气源一空气易得、造价 低、能达到较高速度,且气动元件的生产与应用也在逐步 扩大;液压驱动伺服系统响应快,且重量轻、体积小、动作 平稳、有着良好的控制性能、能在极低的速度下输出较大 力,且由于液压元件的标准化、系列化、通用化,使得液压 系统的设计、制造比较方便。控制部分是机械手动作的指 挥系统,由它来控制动作的顺序、位置、时间等。行程监测 装置对机械手各运动行程进行检测和控制;传感装置中 作者简介:韩梦丹(1991-),女,四川成都人,大学本科,主要研究 方向: 机械设计制造及其自动化。 装传感器,使手指具有敏感性和自控.性,用于检测物件与 抓取机 构接触情况以及物件是否滑落等。 本文以四自由度液压驱动通用机械手为例,对机械 手的工作原理进行简要介绍。如图2所示,即为该种液压 通用机械手的 结构原理图。 图2机械手结构原理图 该种机械手,主要可以归为机械、液压、电气控制系 统等 三个部分。机械部分包括手部、驱动及传送机构、位 置反馈装置和机体等,如图2所示,机械手的手臂前后伸 缩、上下升降、左右转动、上下摆动分别由直线油缸(8)、 直线油缸(1)、回转油缸(3)、以及铰接直线油缸(4)带动 实现。机械手的手腕上下摆动则是由回转油缸(9)带动与 该部分结构相对应的齿轮,再通过链条将运动传送到手 腕摆动轴(图中未画出)来实现。手指握紧部分通过杠杆 手指和单向作用式握紧油缸(6)的配合来输出相应运动。 上述各个油缸的控制是通过步进电动机带动随动阀按照 输人信号来改变通往油缸油液的方向和流量,由于油缸 输出与随动阀之间采用刚性反馈联系,能不断消除输人 与输出之间的误差,从而可进行较为准确的定位。最后, 对步进电动机的控制则由电气控制系统(11)实现,该简 易数字控制系统采用集成电路,共可对步进电机实现手 动、自动以及联动等三种控制方式。通过以上几个部分的 密切配合,机械手的各种运动得以准确无误地实现。 2机械手的应用概况 ① 热加工方面。热加工是高温、危险的体力劳动,采 用机械手操作可以实现高效率和安全工作,如对少量、低 速以及人力不能胜任的作业的实现。在锻造、铸造、熔炼 等工业,机械手的应用能进一步发挥设备的生产能力,安 第31卷第2期 V 〇1.31 No .2 企业技术开发 TECHNOLOGICAL DEVELOPMENT OF ENTERPRISE 2012年1月 Jan .2012
机械手的研究现状和发展趋势
机械手的研究现状和发展趋势 概述及现状: 机械手是一种模拟人手操作的自动机械。它可按固定程序抓取、搬运物件或操持工具完成某些特定操作。应用机械手可以代替人从事单调、重复或繁重的体力劳动,实现生产的机械化和自动化,代替人在有害环境下的手工操作,改善劳动条件,保证人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 20世纪40年代后期,美国在原子能实验中,首先采用机械手搬运放射性材料,人在安全间操纵机械手进行各种操作和实验。50年代以后,机械手逐步推广到工业生产部门,用于在高温、污染严重的地方取放工件和装卸材料,也作为机床的辅助装置在自动机床、自动生产线和加工中心中应用,完成上下料或从刀库中取放刀具并按固定程序更换刀具等操作。 机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需 有 6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2,3个自由度。 机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。 发展前景及方向: 1 重复高精度 精度是指机器人、机械手到达指定点的精确程度, 它与驱动器的分辨率以及反馈装置有关。重复精度是指如果动作重复多次, 机械手到达同样位置的精确程度。重复精度比精度更重要, 如果一个机器人定位不够精确, 通常会显示一个固定的误差, 这个误差是可以预测的, 因此可以通过编程予以校正。重复精度限定的是一个随机误差的范围, 它通过一定次数地重复运行机器人来测定。随着微电子技术和现代控制技术的发展,机械手的重复精度将越来越高, 它的应 用领域也将更广阔, 如核工业和军事工业等。 2 模块化 有的公司把带有系列导向驱动装置的机械手称为简单的传输技术, 而把模块化拼装的机械手称为现代传输技术。模块化拼装的机械手比组合导向驱动装置更具灵活的安装体系。它集成电接口和带电缆及油管的导向系统装置, 使机械手运动自如。模块化机械手使同一机械手可能由于应用不同的模块而具有不同的功能, 扩大了机械手的应用范围, 是机械手的一个重要的发展方向。 4 机电一体化 由“可编程序控制器- 传感器- 液压元件”组成的典型的控制系统仍然是自动化技术的重要方面;发展与电子技术相结合的自适应控制液压元件, 使液压技术从“开关控制”进入到高精度的“反馈控制”; 省配线的复合集成系统, 不仅减少配