单轴、双轴太阳能跟踪系统受力分析及计算
单轴、双轴太阳能跟踪系统受力分析及计算
暨太阳能电池板受力,仰角和水平方向的驱动扭矩分析及计算公式
在太阳能跟踪系统中,受外部风力的影响是在设计时需要考虑的重要环节,决定着整套系统的稳定性和安全性,下面是太阳能光伏跟踪发电系统中一些计算公式和经验,对于初入太阳能或已经从事太阳能跟踪发电的工程技术人员有着很好的借鉴和帮助作用。
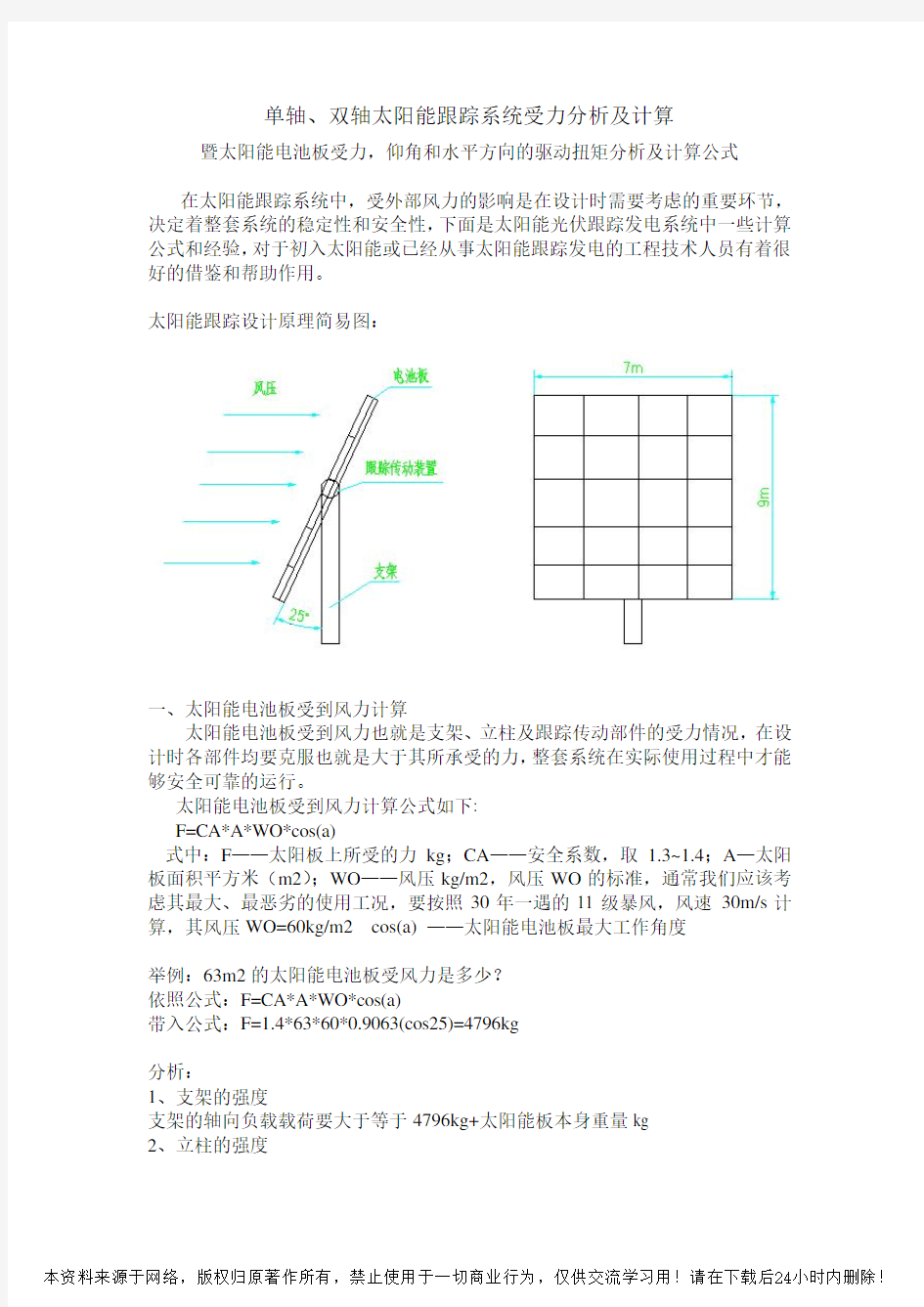
太阳能跟踪设计原理简易图:
一、太阳能电池板受到风力计算
太阳能电池板受到风力也就是支架、立柱及跟踪传动部件的受力情况,在设计时各部件均要克服也就是大于其所承受的力,整套系统在实际使用过程中才能够安全可靠的运行。
太阳能电池板受到风力计算公式如下:
F=CA*A*WO*cos(a)
式中:F——太阳板上所受的力kg;CA——安全系数,取1.3~1.4;A—太阳板面积平方米(m2);WO——风压kg/m2,风压WO的标准,通常我们应该考虑其最大、最恶劣的使用工况,要按照30年一遇的11级暴风,风速 30m/s计算,其风压WO=60kg/m2 cos(a) ——太阳能电池板最大工作角度
举例:63m2的太阳能电池板受风力是多少?
依照公式:F=CA*A*WO*cos(a)
带入公式:F=1.4*63*60*0.9063(cos25)=4796kg
分析:
1、支架的强度
支架的轴向负载载荷要大于等于4796kg+太阳能板本身重量kg
2、立柱的强度
立柱的抗弯曲和剪切力要大于等于4796kg
3、跟踪传动部件的强度
跟踪传动部件的轴向和径向载荷要大于等于4796kg+系统本身重量
二、仰角方向驱动扭矩计算
仰角方向的驱动扭矩,即整个跟踪系统驱动仰角方向时所需要的动力。驱动
扭矩的合理选择决定着整套系统的发电效率的高低和系统的正常运行,电机的功
率过大会消耗更多的太阳能电池板自身的发电能量,减低整套系统的发电效率;电机功率太小,驱动不了整套系统,不能正常运行。
仰角方向驱动扭矩计算
M1=CM*A*WO*D* cos(a) *10
式中:M1——太阳板上所受的仰角方向扭力矩Nm;CM——安全系数,取0.02~0.04;A——太阳板面积m2;WO——风压kg/m2;, (按照最大工作状态7级风,风速15m/s计算,WO=15kg/m2) D——太阳能板最大受力方向的尺寸m cos(a) ——太阳能电池板最大工作角度
举例:63m2的太阳能电池板仰角方向驱动扭矩是多少?太阳能板受力方向的尺
寸7.5m
依照公式:M=CM*A*WO*D* cos(a) *10
带入公式:M=0.02*63*15*9*0.9063*10=1541 Nm
最终经过若干级的减速后,输出扭矩达到1541Nm即可驱动63m2的太阳能仰角
方向的电池板。
三、水平方向驱动扭矩计算
水平方向的驱动扭矩相对较小一些,按照摩擦力计算即可以了。这里要考虑
2方面的摩擦力,一方面是整个支架和电池板的自身重量产生的摩擦力和风对电
池板产生的摩擦力。整体太阳能电池板相对与跟踪传动轴心的倾覆力矩而产生的
摩擦力可忽略不计,取值稍比实际计算的大些就可以了。
M2=CM*(F+N) *10
式中:M2——太阳板上所受的水平方向扭力矩Nm;CM——摩擦系数,取0.005~0.01;F——太阳板上所受的力kg; N——系统自身重量kg
举例:63m2的太阳能电池板水平方向驱动扭矩是多少?电池板及支架重量假设
N =2000kg
依照公式:M2=CM*(F+N) *10
带入公式:M2=0.01*(4796+2000) *10=679 Nm 取700Nm
最终经过若干级的减速后,输出扭矩达到700Nm即可驱动63m2水平方向的太
阳能电池板
光伏双轴跟踪装置
说明书摘要 一种光伏双轴跟踪装置,主要内容为:水平电机固定安装在水平蜗轮蜗杆减速器上,而水平蜗轮蜗杆减速器固定安装在水平壳体上,水平蜗轮蜗杆减速器输出轴通过水平联轴器与水平小齿轮轴连接,水平大齿轮与水平小齿轮啮合带动水平大齿轮轴的转动,来调整太阳能电池板在经度方向上的跟踪;竖直电机固定安装在竖直蜗轮蜗杆减速器上,而竖直蜗轮蜗杆减速器固定安装在竖直壳体上,竖直蜗轮蜗杆减速器输出轴通过竖直联轴器与竖直小齿轮轴连接,竖直大齿轮与竖直小齿轮啮合带动竖直轴的转动,来调整太阳能电池板在纬度方向上的跟踪。本装置可在经度和纬度方向上进行调整,使其与太阳光线时刻保持垂直,提高了光伏发电装置的发电能力。
摘要附图1234567891011 12 13 14 15 16 17 18 19 20 21 22
权利要求书 1.一种光伏双轴跟踪机构,其特征在于,该系统包括水平电机(10)固定安装在水平蜗轮蜗杆减速器(9)上,而水平蜗轮蜗杆减速器(9)固定安装在水平下壳体(11)上,水平蜗轮蜗杆减速器(9)输出轴通过水平联轴器(8)与水平小齿轮轴(3)连接,水平大齿轮(5)与水平小齿轮(6)啮合带动水平大齿轮轴(2)的转动,水平大齿轮轴(2)、水平小齿轮轴(3)采用水平轴承(4)支撑,来调整太阳能电池板(1)在经度方向上的跟踪;竖直电机(13)固定安装在竖直蜗轮蜗杆减速器(14)上,而竖直蜗轮蜗杆减速器(14)固定安装在竖直壳体(19)上,竖直蜗轮蜗杆减速器(14)输出轴通过竖直联轴器(15)与竖直小齿轮轴(16)连接,竖直大齿轮(18)与竖直小齿轮(17)啮合带动竖直轴(12)的转动,竖直轴(12)、竖直小齿轮轴(17)采用竖直轴承(20)支撑,来调整太阳能电池板(1)在纬度方向上的跟踪。 2.如权利要求1所述的一种光伏双轴跟踪机构,其特征在于采用水平涡轮蜗杆减速器(9)带动水平齿轮传动副(5,6)实现水平方向高的传动比,竖直涡轮蜗杆减速器(14)带动竖直齿轮传动副(17,18)实现竖直方向高的传动比。 3.如权利要求1所述的一种光伏双轴跟踪机构,其特征在于竖直轴(12)采用三对竖直轴承(,20)支撑,水平大齿轮轴(2)采用三对水平轴承(4)支撑。
双轴跟踪
ZXS双轴跟踪支架的介绍与技术参数 紫旭光电ZXS采用西班牙技术,比固定系统增加40%以上的电力输出。紫旭ZXS双轴太阳能跟踪器,平台接收面积最大可达93平方米,拥有252度旋转方位角和60度提升角旋转器。回转轴承和减速电机通过齿轮环驱动垂直轴电动升降机系统驱动水平轴,基于三角公式计算天文位置的创新型混合控制系统,可获得 太阳精确位置。 主要特点 1.先进的定位控制 CP125为ZXS提供最佳的定位控制,向日葵方式跟踪,做到精确定位计算,精确地移动控制及风速的安 全控制。 2.提高能量输出 紫旭ZXS太阳能地面支架追踪系统比固定的太阳能安装系统多了40%的能量输出。 3.良好的适应性 不受天气、季节和地理位置的影响,可以安装于多种户外环境。 4.安全性 使用独立的传动电动机,驱动受控仪,因此不会受到不均匀沉降的影响,同时提供防雷击系统及台风防 止系统。 5.高品质 无论是原材料的选择,还是生产过程,紫旭光电都进行严格的质量管制,以确保系统的结构强度以及使 用寿命达到最优。 技术参数 安装地点户外 追踪系统类型双轴 追踪精度±1o 最大系统面积 15m2-93m2 系统排列按设计图纸 跟踪轴水平和垂直 垂直和水平旋转角垂直轴最大旋转角度252度 水平轴旋转角70度 跟踪器允许的最大组件功率直至12.9KWp(可调接收平台) 地基按地面性质情况设计尺寸的钢筋混泥土 抗风能力风载1:通常状态-14m/s(50km/h) 风载2:安全状态-35m/s(126km/h) 风载3:瞬间最大-66.5m/s(240km/h) 质保年限十年
阳能双轴跟踪系统/太阳能双轴跟踪/双轴太阳能跟踪系统 产品规格:RY-SL-B 产品说明: 系统介绍 目前,国内外太阳能路灯主要采用固定安装方式,其全天的有效日照时间约为5小时,其余日照时间内因太阳光光强不足或阳光入射角小的原因而导致发电量大幅度下降。 常州润源电子科技有限公司RY-SL-B型双轴太阳跟踪系统采用了自主研发设计的阳光跟踪传感器、控制器及传动执行机构,其最大特点是跟踪控制系统的低功耗。 实际测试结果表明,100W的太阳能电池板配上RY-SL-B型双轴太阳能路灯跟踪系统后,发电量至少增加45%,而系统本身的能耗为0.1W,达到了实用化及市场推广应用的目的。 系统组成 RY-SL-B型双轴太阳跟踪系统由阳光跟踪传感器、控制器和传动执行机构三部分组成。 阳光跟踪传感器 在有效光照条件下的全程对阳光高精度测量,并将太阳光方位信号转换成电信号,传送给跟踪控制器。 控制器 跟踪控制器接收太阳光跟踪定位传感器的信号后,驱使传动执行机构运转,使太阳能电池板垂直于太阳光。 传动执行机构 采用独特的机械结构设计,实现水平方向360°、俯仰180°旋转,最大抗风可达10级。
太阳能跟踪器工作原理
太阳能跟踪器的工作原理 一工作原理 “太阳光寻迹传感器”安装在太阳能装置上,根据太阳光的位置,驱动电机,带动机械转动机构,始终跟随太阳位置运动。当太阳偏转一定角度时(一般5--10分钟左右),控制器发出指令,转动机构旋转几秒钟,到达正对太阳位置时时停止,等待下一个太阳偏转角度,一直这样间歇性运动;当阴天或晚上没有太阳出现时停止动作;只要出现太阳它就自动寻找并跟踪到位,全自动运行,无需人工干预,东西向、南北向二维控制,也可单方向控制,使用电源直流12伏,技术指标 1. 跟踪起控角度:1°--10°(不同应用类型) 2. 水平(太阳方位角)运行角度:Ⅰ型0°--360°,Ⅱ型-20°-- +200° 3. 垂直(太阳高度角)调整角度:10°--120°(太阳光与地面夹角) 4. 传动方式:丝杠、涡轮蜗杆、齿轮 5. 承载重量:10Kg-- 500Kg 6. 系统重量:2 Kg--500Kg 7. 电机功率:0.4W--15W 8. 电源电压 DC6V--24V 9. 运行环境温度: -40--85℃ 10.运行时间≥10万小时 11.室外全天候条件运行现有的太阳能自动跟踪控制器无外乎两种:一是使用一只光敏传感器与施密特触发器或单稳态触发器,构成光控施密特触发器或光控单稳态触发器来控制电机的停、转;二是使用两只光敏传感器与两只比较器分别构成两个光控比较器控制电机的正反转。由于一年四季、早晚和中午环境光和阳光的强弱变化范围都很大,所以上述两种控制器很难使大阳能接收装置四季全天候跟踪太阳。这里所介绍的控制电路也包括两个电压比较器,但设在其输人端的光敏传感器则分别由两只光敏电阻串联交叉组合而成。每一组两只光敏电阻中的一只为比
太阳能路灯双轴跟踪系统设计
太阳能路灯双轴跟踪系统设计 摘要:针对当前太阳能路灯转换效率低的弊端,介绍了一种太阳能路灯双轴跟踪系统,通过实时检测光强的变化驱动执行机构,保证太阳能电池板始终垂直于太阳光线,从而提高太阳能利用效率。实验表明,太阳能电池板在双轴跟踪情况下,发电量要比最佳角度固定安装提高34%。 关键词: AVR单片机;太阳能路灯;双轴跟踪;光伏发电;蓝牙 随着科技日新月异的发展,太阳能产品层出不穷,太阳能路灯应运而生并得以飞速发展。太阳能路灯的供电方式主要有两种:一种是太阳能市电互补方式,另外一种是纯太阳能供电方式。前者除了需要挖沟渠,铺设电缆等大量的繁琐基础工程,还要长期不断地对线路和其他配置进行维护和更新,成本较高。但因其以市电作为储备能源,所以对太阳能发电量要求不高。后者不需要铺设电缆,无储备能源,成本低。为了使路灯正常工作,需要保证太阳能电池板的功率足够高,以产生充足的电量。而由于发电效率不高的问题,有时候会出现蓄电池电量低,无充足电量供予路灯照明的现象,其可靠性大大不如市电互补方式。为了提高其工作可靠性,本文提出一种太阳能路灯双轴跟踪系统。此系统通过在东西、南北两个方向实时跟踪太阳,达到提高太阳能利用效率和增加发电量的目的,以提高纯太阳能式供电的可靠性。 1 系统概述 太阳能路灯双轴跟踪系统由控制系统、太阳能充放电控制器、12 V铅酸蓄电池、电机、太阳能电池板、跟踪支架以及路灯等组成。其中控制系统主要包括供电电路、单片机及外围电路、光电检测电路、掉电检测电路、位置反馈电路、蓝牙无线传输电路、电机驱动电路等。太阳能双轴跟踪装置的原理框图。 核心的控制单元采用了ATMEL公司的ATmage16,ATmage16拥有16 KB的系统内可编Flash,512 B EEPROM,1 KB SRAM,32个通用I/O口,8路10位具有可选差分输入级可编程增益的ADC,3个具有比较模式的灵活的定时器/计数器和具有片内振荡器的可编程看门狗定时器,功能齐全且强大。 当太阳从东方升起且达到一定光照强度时,系统开始识别太阳的方位,并调整相应的角度,开始进行一天的跟踪。傍晚,当太阳光线弱到一定程度时,停止跟踪。为了避免晚上因为其他灯光的影响导致系统电机的误动作,在停止跟踪后,系统将休眠10个小时,此期间,光电检测模块停止工作,电机不动作。直到10小时过后,单片机将驱动电机回到最东边,光电检测模块也重新开始检测太阳光线,开始新的一天的工作。太阳能充放电控制器可以有效地控制蓄电池的充放电,防止蓄电池因过充或过放等不正常使用而降低寿命。本系统以经济、节能、实用为核心设计思想,除了能够在东西、南北两个方向上同时跟踪太阳,还能实现以下四个功能: (1)位置反馈功能。使系统能够辨别自己所处的跟踪方位。 (2)蓝牙通信功能。维修人员可以通过手机客户端实现双轴跟踪系统的控制、参数设定和系统的状态检测。 (3)掉电检测功能。使系统在检测到蓄电池低电量时停止跟踪,以防止蓄电池的过放。系统实时检测蓄电池电量,当蓄电池电量不足时,控制模块将驱动电机,使太阳能电池板置于最佳安装角度,并停止跟踪。蓄电池并不会因此停止对控制系统的供电。 (4)抗风性设计。当遇到狂风或是暴风雨天气时,控制系统将驱动电机,将太阳能电池板放平,使之所受外力最小。 2 机械结构
太阳能自动跟踪系统方案
摘要 人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,但是太阳能又存在着低密度、间歇性、空间分布不断变化的缺点,这就使目前的一系列太阳能设备对太阳能的利用率不高。太阳光线自动跟踪装置解决了太阳能利用率不高的问题。本文对太阳能跟踪系统进行了机械设计和自动跟踪系统控制部分设计。 第一,机械部分设计: 机械结构主要包括底座、主轴、齿轮和齿圈等。当太阳光线发生偏离时,控制部分发出控制信号驱动步进电机1带动小齿轮1转动,小齿轮带动大齿轮和主轴转动,实现水平方向跟踪;同时控制信号驱动步进电机2带动小齿轮2,小齿轮2带动齿圈和太阳能板实现垂直方向转动,通过步进电机1、步进电机2的共同工作实现对太阳的跟踪。 第二,控制部分设计: 主要包括传感器部分、信号转换电路、单片机系统和电机驱动电路等。系统采用光电检测追踪模式实现对太阳的跟踪。传感器采用光敏电阻,将两个完全相同的光敏电阻分别放置于一块电池板东西方向边沿处下方。当两个光敏电阻接收到的光强度不相同时,通过运放比较电路将信号送给单片机,驱动步进电机正反转,实现电池板对太阳的跟踪。 关键词太阳能;跟踪;光敏电阻;单片机;步进电机
Abstract Human being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on.These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar.In this paper, the solar tracking system of the mechanical part and control system part are designed. First,the mechanical part is designed. Mechanical structure mainly includes the main spindle, stepping motors, gears and gear ring, and so on. When the sun's rayshas a deviation, small gear arerotated by stepper motor according to the control signal from MCU. And the large gear and main spindle is rotated by small gear in order to track to achieve the level direction.At the same time, another small gear is rotated by another stepper motor according to the control signal.And the large gear and the solar panels are rotated by the small gear in order to track to achieve the vertical direction. Solar is tracked by the two stepper motors together. Second, control system part is designed. Control system mainly includesthe sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection systemisused to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances receiveddifferent light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors. Keywords Solar energyTrackingPhotosensitive resistance SCMSteppingmotor
太阳能自动跟踪系统的设计
太阳能自动跟踪系统的设计 1引言 开发新能源和可再生资源是全世界面临的共同课题,在新能源中,太阳能发电已成为全球发展最快的技术。太阳能作为一种清洁无污染的能源,开发前景十分广阔。然而由于太阳存在着间隙性,光照强度随着时间不断变化等问题,这对太阳能的收集和利用装置提出了更高的要求(见图1)。目前很多太阳能电池板阵列基本都是固定的,不能充分利用太阳能资源,发电效率低下。据测试,在太阳能电池板阵列中,相同条件下采用自动跟踪系统发电设备要比固定发电设备的发电量提高35%左右。 所谓太阳能跟踪系统是能让太阳能电池板随时正对太阳,让太阳光的光线随时垂直照射太阳能电池板的动力装置,能显著提高太阳能光伏组件的发电效率。目前市场上所使用的跟踪系统按照驱动装置分为单轴太阳能自动跟踪系统和双轴太阳能自动跟踪系统。所谓单轴是指仅可以水平方向跟踪太阳,在高度上根据地理和季节的变化人为的进行调节固定,这样不仅增加了工作量,而且跟踪精度也不够高。双轴跟踪可以在水平方位和高度两个方向跟踪太阳轨迹,显然双轴跟踪优于单轴跟踪。 图1 太阳能的收集装置现场 从控制手段上系统可分为传感器跟踪和视日运动轨迹跟踪(程序跟踪)。传感器跟踪是利用光电传感器检测太阳光线是否偏离电池板法线,当太阳光线偏离电池板法线时,传感器发出偏差信号,经放大运算后控制执行机构,使跟踪装置从新对准太阳。这种跟踪装置,灵敏度高,但是遇到长时间乌云遮日则会影响运行。视日运动轨迹跟踪,是根据太阳的实际运行轨迹,按照预定的程序调整跟踪装置。这种跟踪方式能够全天候实时跟踪,其精度不是很高,但是符合运行情况,应用较广泛。 从主控单元类型上可以分为PLC控制和单片机控制。单片机控制程序在出厂时由专业人员编写开发,一般设备厂家不易再次进行开发和参数设定。而学习使用PLC比较容易,通过PLC厂家技术人员的培训,设备使用厂家的技术人员可以很方便的学会简单的调试和编写,并且PLC能够提供多种通讯接口,通讯组网也比较方便简单。
光伏双轴跟踪装置
光伏双轴跟踪装置
说明书摘要 一种光伏双轴跟踪装置,主要内容为:水平电机固定安装在水平蜗轮蜗杆减速器上,而水平蜗轮蜗杆减速器固定安装在水平壳体上,水平蜗轮蜗杆减速器输出轴通过水平联轴器与水平小齿轮轴连接,水平大齿轮与水平小齿轮啮合带动水平大齿轮轴的转动,来调整太阳能电池板在经度方向上的跟踪;竖直电机固定安装在竖直蜗轮蜗杆减速器上,而竖直蜗轮蜗杆减速器固定安装在竖直壳体上,竖直蜗轮蜗杆减速器输出轴通过竖直联轴器与竖直小齿轮轴连接,竖直大齿轮与竖直小齿轮啮合带动竖直轴的转动,来调整太阳能电池板在纬度方向上的跟踪。本装置可在经度和纬度方向上进行调整,使其与太阳光线时刻保持垂直,提高了光伏发电装置的发电能力。
摘要附图1234567891011 12 13 14 15 16 17 18 19 20 21 22
权利要求书 1.一种光伏双轴跟踪机构,其特征在于,该系统包括水平电机(10)固定安装在水平蜗轮蜗杆减速器(9)上,而水平蜗轮蜗杆减速器(9)固定安装在水平下壳体(11)上,水平蜗轮蜗杆减速器(9)输出轴通过水平联轴器(8)与水平小齿轮轴(3)连接,水平大齿轮(5)与水平小齿轮(6)啮合带动水平大齿轮轴(2)的转动,水平大齿轮轴(2)、水平小齿轮轴(3)采用水平轴承(4)支撑,来调整太阳能电池板(1)在经度方向上的跟踪;竖直电机(13)固定安装在竖直蜗轮蜗杆减速器(14)上,而竖直蜗轮蜗杆减速器(14)固定安装在竖直壳体(19)上,竖直蜗轮蜗杆减速器(14)输出轴通过竖直联轴器(15)与竖直小齿轮轴(16)连接,竖直大齿轮(18)与竖直小齿轮(17)啮合带动竖直轴(12)的转动,竖直轴(12)、竖直小齿轮轴(17)采用竖直轴承(20)支撑,来调整太阳能电池板(1)在纬度方向上的跟踪。 2.如权利要求1所述的一种光伏双轴跟踪机构,其特征在于采用水平涡轮蜗杆减速器(9)带动水平齿轮传动副(5,6)实现水平方向高的传动比,竖直涡轮蜗杆减速器(14)带动竖直齿轮传动副(17,18)实现竖直方向高的传动比。 3.如权利要求1所述的一种光伏双轴跟踪机构,其特征在于竖直轴(12)采用三对竖直轴承(,20)支撑,水平大齿轮轴(2)采用三对水平轴承(4)支撑。
太阳能跟踪器小知识
水平单轴跟踪系统 水平单轴跟踪系统是指光伏方阵可以绕一根水平轴东西方向跟踪太阳。跟踪系统主要由:太阳能电池组件安装支架、水平转轴、转动驱动机构、风速检测装置和跟踪控制器组成。 特点及应用:这种跟踪装置结构特点是结构简单、成本较低、更适合于纬度较低的地区,发电效率比固定纬角的固定式结构高30%左右。可以安装在地面也可以安装在屋顶。 极轴式单轴跟踪系统 极轴式单轴跟踪系统具有一根固定纬角的转轴,光伏方阵可以绕该转轴东西向旋转跟踪太阳。跟踪系统主要由:光伏组件安装支架、转轴、支架、电动推杆、风速探头及跟踪控制器组成。 特点及应用:这种跟踪系统的特点是结构最简单,造价最低。比较适合纬度较高的地区使用,发电效率比固定纬角的固定式系统高30%以上。可以安装在地面也可以安装在屋顶。 阵列式双轴跟踪系统 这种系统具有一根南北方向的纵向转轴和固定在纵向轴上的多根横向转轴组成,每块太阳能组件小方阵既可绕纵向轴东西向转动又可绕横向转轴上下旋转。跟踪系统主要由:纵向转轴、横向转轴、东西向推杆、高度角推杆、连杆、支架、组件安装支架、向日跟踪探头、风速探头及跟踪控制器组成。
特点及应用:与水平单轴跟踪相比,实现了双轴跟踪,发电效率更高,比固定纬角的固定结构高45%以上,与立柱式跟踪相比,系统的高度更低,抗风性能更好,单位面积的安装功率更高。既可安装在地面也可安装在屋顶。 立柱式双轴跟踪系统 有一根立轴和一根水平轴,整个光伏方阵由一根立柱支撑,光伏方阵既可绕立轴跟踪太阳的方位角,同时绕水平轴跟踪太阳的高度角,它完全无限制地跟踪太阳方位,最大限度地发挥跟踪系统的效能。跟踪系统主要由:组件安装支架、水平轴、水平动力头、电动推杆、立柱、向日跟踪探头、风速探头、跟踪控制器等组成。 特点及应用:跟踪范围最大、跟踪效率最高,比固定纬角的固定结构高50%以上。一般仅适合安装在地面
双轴跟踪说明书
太阳双轴跟踪说明书 此控制板板为太阳能双轴跟踪系统,控制两个直流电机的旋转,使电池板对准太阳。系统为12V系统,所以需要的是两个可以正反转的12V直流电机。实际连接时把仰俯的电机连接到上边,把旋转的电机连接到下边。 一、整体连接图如下:见图1 图1 二、左上角KEY1、KEY2、KEY3、KEY4为手动控制两个电机的正反转,见图2 KEY5无定义。 图2
三、下边红色拨码开关为跟踪的时间间隔,图3 1:为1小时间隔跟踪一次。 2:为2小时间隔跟踪一次。 3:为3小时间隔跟踪一次。 4:为1分钟间隔跟踪一次(只能作为测试用) 都不拨上的话,默认为1小时间隔跟踪一次。不可以组合拨码。组合默认为1小时。 图3 四、无线控制电机正反转。AB键控制一个电机的正反转,CD键控制另一个电机的正反转。图4为无线接收模块,安装在控制板上,有元器件的面朝外。 图4 图5为无线发射模块 图5
接收模块的安装,元器件朝外 六、LED显示定义,图6 第一个红色LED:快闪表示白天工作,慢闪表示进入黑夜状态,等待第二天继续工作。 第二个绿灯LED:亮表示进入黑夜状态,灭表示白天状态。 第三个绿色LED:亮表示南北电机需要旋转到太阳位置,灭表示南北方向太阳已经到达最佳位置。 第四个绿色LED:亮表示东西电机需要旋转到太阳位置,灭表示东西方向太阳已经到达最佳位置。 图6 七、左下角为传感器接入端口,图7 +PV-:表示需要把电池板的正负极接入,来判断黑夜和白天,如果不接入判断为黑夜状态。+WIN-:表示风速测试接口。 +GM-:表示光敏测试接口。 +X-:表示未知测试接口,用户可自己定义。 后三种都没有接入,如果需要的话,联系本人。 图7 八、数码管的显示,图8 数码管显示的是剩余时间,从60分钟到0分钟。如果测试的话每一分钟跟踪一次;如果一小时跟踪的话,则到0跟踪一次;2小时跟踪一次的话,需要两次60到0跟踪一次;同理三小时需要三次60到0的显示状态。 图8 九、RJ45网线接口为传感器的接线口,已经做好,连接上即可,自己做也可。单需要把传感器和板子的接口线顺序反过来。 图9 十、KEY6:复位键。 十一、电机连接,图10
太阳能跟踪器
现有的太阳能自动跟踪控制器无外乎两种:一是使用一只光敏传感器与施密特触发器或单稳态触发器,构成光控施密特触发器或光控单稳态触发器来控制电机的停、转;二是使用两只光敏传感器与两只比较器分别构成两个光控比较器控制电机的正反转。由于一年四季、早晚和中午环境光和阳光的强弱变化范围都很大,所以上述两种控制器很难使大阳能接收装置四季全天候跟踪太阳。这里所介绍的控制电路也包括两个电压比较器,但设在其输人端的光敏传感器则分别由两只光敏电阻串联交叉组合而成。每一组两只光敏电阻中的一只为比较器的上偏置电阻,另一只为下偏置电阻;一只检测太阳光照,另一只则检测环境光照,送至比较器输人端的比较电平始终为两者光照之差。所以,本控制器能使太阳能接收装置四季全天候跟踪太阳,而且调试十分简单,成本也比较低。 电路原理
电路原理图如图1所示(点击下载原理图),双运放LM358与R1、R2构成两个电压比较器,参考电压为VDD(+12V)的1/2。光敏电阻RT1、RT2与电位器RP1和光敏电阻RT3、RT4与电位器RP2分别构成光敏传感电路,该电路的特殊之处在于能根据环境光线的强弱进行自动补偿。如图2所示,将RT1和RT3安装在垂直遮阳板的一侧,RT4和RT2安装在另一侧。当RT1、RT2、RT3和RT4同时受环境自然光线作用时,RP1和RP2的中心点电压不变。如果只有RT1、RT3受太阳光照射,RT1的内阻减小,LM358的③脚电位升高,①脚输出高电平,三极管VT1饱和导通,继电器K1导通,其转换触点3与触点1闭合。同时RT3内阻减小,LM358的⑤脚电位下降,K2不动作,其转换触点3与静触点2闭合,电机M正转;同理,如果只有RT2、RT4受太阳光照射,继电器K2导通,K1断开,电机M反转。当转到垂直遮阳板两侧的光照度相同时,继由器K1、
太阳能自动跟踪装置设计报告
吉林铁道职业技术学院 电子制作职业技能大赛(论文) 题目太阳能自动跟踪装置设计
参赛人姓名王志会张卫国朱峰所在系电气工程系 指导教师陈冬鹤 完成时间2013年5月26日
吉林铁道电子制作职业技能大赛设计报告 题目:太阳能自动跟踪装置设计 主要内容、基本要求等: ◆主要内容:加强大学生动手操作能力,促进集体荣誉感。 ◆基本要求:1,利用单片机控制实现太阳能电池板随着太阳(光源)的位置变 化而调整自身相应的姿态,以达到太阳光能的最佳利用。 2,实现一定的姿态控制精度。 3,以低成本、低功耗完成设计并实现目标电路的组装。 ◆主要参考资料:电路基础、电工技术、电子手工焊接、单片机原理及应用、传感器原理与应用。 完成日期:2013年5月26日 指导教师:陈冬鹤 实验组组长:王志会 2013年 6 月 5 日
太阳能自动跟踪装置 研制目的 人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,太阳能光伏发电是改善生态环境、提高人类生存质量的绿色能源之一,但由于传统太阳能板方向固定,受光时间有限。因此研制可随光移动的太阳能跟随系统。
一自动跟踪系统整体设计 1.1 系统总体结构 本系统包括光电转换器、步进电机、89C5系列单片机以及相应的外围电路等。太阳能电池板可以360度自由旋转。控制机构将分别对水平方向进行调整。单片机加电复位后,首先由TRCT5000构成的定位系统对整个系统进行预置定位,然后单片机将对两光敏电阻采样进来的两个电平进行比较,电平有高电平和低电平两种,若两电平相等则电池板停止转动,若不等单片机将对两电平进行比较判定,驱动步进电机让太阳能板与之相对应转动,实现电池板对太阳的跟踪。图1-1所示: 1.2 光电转换器
太阳能电池板双轴自动跟踪伺服控制系统的设计
题目:光伏发电太阳能电池板双轴伺服控制系统研究 一、题目说明 1、双轴跟踪的基本原理 双轴跟踪又可以分为两种方式:极轴式全跟踪和高度----方位角式全跟踪。极轴式全跟踪原理如图1.1所示,太阳能设备的能量转换部分的一轴指向地球北极,即与地球自转轴相平行,故称为极轴;另一轴与极轴垂直,称为赤纬轴。工作时太阳能设备的能量转换部分所在平面绕极轴运转,其转速的设定与地球自转角速度大小相同方向相反用以跟踪太阳方位角:反射镜围绕赤纬轴作俯仰转动是为了适应太阳高度角的变化,通常根据季节的变化定期调整。 图1.1 极轴式跟踪 高度角---方位角式太阳跟踪方法又称为地平坐标系双轴跟踪,其原理如图1.2所示。太 图1.2 高度---方位角式全跟踪
阳能设备的能量转换部分的方位轴垂直于地平面,另一根轴与方位轴垂直,称为俯仰轴。工作时太阳能设备的能量转换部分根据太阳的视日运动绕方位轴转动改变方位角,绕俯仰轴作俯仰运动改变太阳能设备的能量转换部分的倾斜角,从而使能量转换部分所在平面的主光轴始终与太阳光线平行。这种跟踪系统的特点是跟踪精度高,而且太阳能设备的能量转换部分的重量保持在垂直轴所在的平面内,支承结构的设计比较容易。 2、光伏发电系统光电板自动跟踪系统的原理 太阳电池方阵的发电量与阳光入射角有关,光线与太阳电池方阵平面垂直时发电量最大,如果改变入射角,发电量将明显下降。其基本原理与结构为:由2台电动机和减速机分别构成方位角转动机构和高度角转动机构,光电传感器与太阳能电池板方阵平面垂直安装。随着光线方向的细微改变,传感器失衡,引起系统输出信号产生偏差,达到一定幅度时,方向开关电路启动,执行机构开始进行纠正,使光电传感器重新达到平衡,即太阳能电池板方阵平面与光线构成90度角而停止转动,并完成一次调整周期。如此不断地调整,时刻沿着太阳的运行轨迹追随太阳,构成一个闭路负反馈系统,实现了跟踪功能。该系统不需设定基准位置,跟踪器永远不会迷失方向。系统还设有防杂光干扰及夜间停止跟踪电路,并附有手动控制开关,以方便调试。光电板跟踪系统框图如图1.3所示。 图1.3 光电板自动跟踪系统框图 3、太阳高度角和方位角 1) Coper方程 太阳光线与地球赤道面的交角就是太阳的赤纬角,以 表示。在一年中,太阳赤纬每天都在变化,但不超过士23°27′的范围。夏天最大变化到夏至日的+23°27′;冬季最小变化到冬至日的-23°27′.太阳赤纬随季节变化,按照Coper方程, 计算得:
(整理)十大光伏跟踪器企业.
十大光伏跟踪器企业 光伏跟踪系统通过实时跟踪太阳运动,使太阳光直射光伏阵列,从而增加光伏阵列接收到的太阳辐射量,提高太阳光伏发电系统的总体发电量。目前使用广泛的有四种光伏自动跟踪系统,包括水平单轴跟踪、双立柱斜单轴跟踪、垂直单轴跟踪和双轴跟踪,其中水平单轴跟踪和倾斜单轴跟踪、垂直单轴跟踪只有一个旋转自由度,双轴跟踪具有两个旋转自由度。北极星太阳能光伏网编辑按照已知销售商数量(非静态指标)列出了国内前十名光伏跟踪器制造商,仅供参考。 1、无锡昊阳新能源科技有限公司 无锡昊阳新能源科技有限公司是一家集技术开发、生产及工程服务为一体的高新技术型企业。多年来,公司在太阳能离网供电、太阳能并网发电、聚光太阳能组件等领域积累了坚实的技术实力和丰富的项目经验,拥有多项专利及权威认证资质,可以为用户提供包括系统设计,产品定制开发,系统集成及工程实施在内的整体解决方案。公司总部位于江苏省无锡宜兴经济开发区,并在北京、西安、中东、印度及美国均设有办事处。 昊阳一直专注于跟踪系统的研发创新,在太阳能跟踪系统方面已拥有全面的生产线,产品包括水平单轴跟踪器,倾角单轴跟踪器,垂直单轴跟踪器,双轴跟踪器,HCPV高倍聚光跟踪器及跟踪系统驱动机构等。 2、江阴凯迈机械有限公司
凯迈集团是世界领先的回转驱动装置供应商,产品广泛应用于太阳能跟踪系统、高空作业车、工程机械车辆、园林机械、起重机和造船业、建筑机械、游乐场、自动停车场、矿用和隧道钻床、交通运输和输送装置、通讯雷达车及卫星地面接收器等,是全球化美资公司。 公司通过2009年的组织架构重建,目前集团公司设立三个全资子公司,分别为凯迈北美公司,凯迈欧洲公司和凯迈中国公司。作为全球生产基地,研发中心和市场销售分区,凯迈中国致力于为我们尊贵的客户持续不断的提供优质的服务和产品,以期达到或超越客户的期望。到2010年为止,公司已经向全世界各主要市场提供了超过110,000多套各类回转驱动装置。 3、杭州慧源新能源科技有限公司 杭州慧源新能源科技有限公司隶属于柏年光电标饰有限公司(简称柏年光标)创建于1996年。慧源坐落于杭州钱江经济开发区,地处超山风景区、丁山湖湿地和塘栖古镇一带,工厂位于约12万平方米的生产基地(柏年产业园)及约2万平方米的研发、综合办公大楼。为打造全球领先的太阳能光伏支架和追日系统产品产业基地奠定了良好的基础。 慧源由生产各类标识产品的展示支架产品起步,经过多年技术创新,已开发出一系列太阳能光伏支架系统,从斜屋顶到地面大型电站及停车棚,国际销售遍及澳大利亚、新西兰、印度和泰国,产品出口全球10多个国家和地区。
基于PLC的太阳能单轴跟踪控制系统
龙源期刊网 https://www.360docs.net/doc/c014894930.html, 基于PLC的太阳能单轴跟踪控制系统 作者:李子剑苗春艳 来源:《数字技术与应用》2013年第10期 摘要:为实现太阳能电池板对太阳光能的最高转换率,改变传统太阳能电池板固定安装对太阳光能利用低下的弊端。本文以光敏电阻构成跟踪器,并利用西门子的S7200系列PLC和MM440设计太阳能单轴自动跟踪系统。该太阳能单轴自动跟踪系统可实现在有太阳光照射的情况下,在任意时刻让太阳光直射太阳能电池板,同时解决了风力过大时太阳能电池板的防风问题。 关键词:太阳能单轴跟踪控制系统 PLC 中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2013)10-0009-01 1 概述 目前,光伏电池光电转换效率仍然不高而且价格昂贵,同时大型的太阳能发电站中光伏电池板基本都是固定的,没有充分利用太阳能资源,发电效率低下。相同条件下,采用固定发电方式要比自动跟踪发电方式的发电量要低35%以上,因此非常有必要对太阳光进行自动跟踪。光伏发电自动跟踪装置是一种可以提高太阳能利用率,降低光伏发电成本的有效途径。研究精确的太阳跟踪装置,可使光伏电池板接收到更多的太阳辐射能量,增加发电量,提高人类对太阳能源的利用率。[1] 目前光跟踪技术主要是两种方法,即:视日运行轨道跟踪方法[2]、光电自动跟踪方法。 光电跟踪方式又可以分为单轴跟踪和双轴跟踪,本文以选择单轴跟踪方式,整个系统的PLC 硬件选择SIEMENS公司的S7-200系列CPU226(24输入/16输出),其中主机为CPU226,模拟量扩展模块EM231(4输入),EM251(4输入/1输出)。 2 工作原理 单轴自动跟踪系统主要由PLC、传感器、电机等组成。它的基本原理是:当太阳光照射到传感器上时,由惠斯顿电桥及转换电路把光敏电阻值转变为电流值(4~20mA),转化后光照越强相应的电流值越小,光照越弱相应的电流值越大,此电流值经s7-200的模拟量输入模块 保存到s7-200中,由s7-200与规定值比较后控制电机转动,使聚光器随着太阳移动而移动,从而达到跟踪的目的。 2.1 机械部分 (1)其追踪太阳实时方位的方式为:电机转动使太阳能电池板对准太阳方向。(2)追踪器实现东西方向180°旋转。该运动范围可以满足在地球任意经度纬度的地区安装,可实现追
太阳能跟踪器中英文对照外文翻译文献
(文档含英文原文和中文翻译) 中英文对照外文翻译 英文原文 Solar Tracker The Solar Tracker team was formed in the fall of 2005 from five students in an ME design team, and a Smart House liaison. We continued the work of a previous solar tracker group. The task was to design a prototype tracking device to align solar panels optimally to the sun as it moves over the course of the day. The implementation of such a system dramatically increases the efficiency of solar panels used to power the Smart House. This report examines the process of designing and constructing the prototype, the experiences and problems encountered, and suggestions for continuing the project. 1.Introduction
Solar tracking is the process of varying the angle of solar panels and collectors to take advantage of the full amount of the sun?s energy. This is done by rotating panels to be perpendicular to the sun?s angle of incidence. Initial tests in industry suggest that this process can increase the efficiency of a solar power system by up to 50%. Given those gains, it is an attractive way to enhance an existing solar power system. The goal is to build a rig that will accomplish the solar tracking and realize the maximum increase in efficiency. The ultimate goal is that the project will be cost effective – that is, the gains received by increased efficiency will more than offset the one time cost of developing the rig over time. In addition to the functional goals, the Smart House set forth the other following goals for our project: it must not draw external power (self-sustaining), it must be aesthetically pleasing, and it must be weatherproof. The design of our solar tracker consists of three components: the frame, the sensor, and the drive system. Each was carefully reviewed and tested, instituting changes and improvements along the design process. The frame for the tracker is an aluminum prismatic frame supplied by the previous solar tracking group. It utilizes an …A-frame? design with the rotating axle in the middle. Attached to the bottom of this square channel axle is the platform which will house the main solar collecting panels. The frame itself is at an angle to direct the panels toward the sun (along with the inclination of the roof). Its rotation tracks the sun from east to west during the day. The sensor design for the system uses two small solar panels that lie on the same plane as the collecting panels. These sensor panels have mirrors vertically attached between them so that, unless the mirror faces do not receive any sun, they are shading one of the panels, while the other is receiving full sunlight. Our sensor relies on this difference in light, which results in a large impedance difference across the panels, to drive the motor in the proper direction until again, the mirrors are not seeing any sunlight, at which point both solar panels on the sensor receive equal sunlight and no power difference is seen. After evaluation of the previous direct drive system for the tracker, we designed a belt system that would be easier to maintain in the case of a failure. On one end of the frame is a motor that has the drive pulley attached to its output shaft. The motor rotates the drive belt which then rotates the pulley on the axle. This system is simple and easily disassembled. It is easy to interchange motors as needed for further testing and also allows for optimization of the final gear ratio for response of the tracker. As with any design process there were several setbacks to our progress. The first and foremost was inclement weather which denied us of valuable testing time. Despite the setbacks, we believe this design and prototype to be a very valuable proof-of-principle. During our testing we have eliminated many of the repetitive problems with the motor and wiring so that future work on the project will go more smoothly. We also have achieved our goal of tracking the sun in a …hands-off?