浅谈船舶在不同状态下发生电罗经故障的应对措施
1
2017年 第2期
2017年6月第13卷 第2期Jun. 2017
Vol.13 No.2浙江国际海运职业技术学院学报
JOURNAL OF ZHEJIANG INTERNATIONAL MARITIME COLLEGE
作者简介:王智明(1969—),男,浙江舟山人,浙江国际海运职业技术学院航海工程学院党总支书记。
电罗经是现代船舶上重要且必备的导航仪器,它不但能够指示比较精确的航向而且可以向诸如雷达、AIS 等其他重要设备提供罗经信号。但是,由于电罗经结构复杂,其故障发生的概率又具有不同层次的模糊、不确定性,一旦发生故障且不能及时排除,将严重影响航行,并对船舶的安全带来极大的安全隐患。针对这一情况,了解电罗经常见的故障诊断方法,研究在电罗经突发故障的情况下船舶如何应对的具体措施尤为必要。
1电罗经工作原理
电罗经(陀螺罗经)可以自动连续不断地向船舶提供航向数字信号,并通过数字放大器将航向信号分配到其他需要船首信号的设备和仪器上,例如雷达、VDR 等,从而使得船舶可以满足航行的要求。电罗经的全套设备主要包括主罗经、分罗经、复示器、电源以及控制单元,其核心指向部件是陀螺球。在陀螺不通电的时候,陀螺球可以指向任意方向,具有三自由度。当其在20000转/分
浅谈船舶在不同状态下发生电罗经故障的应对措施
王智明
(浙江国际海运职业技术学院,浙江舟山 316021)
摘 要:电罗经是现代航海的重要且必备的导航设备,虽然在航行中发生故障的情况不多,但一旦发生故障由于其基本无法随船维修势必影响船舶的安全航行。文章列举了电罗经常见的故障诊断方法,阐述了船舶在不同航行状态下发生电罗经故障时应采取的应急措施,以保证船舶航行安全。 中图分类号:U666.1 文献标志码:A 关键词:电罗经;故障诊断;措施
On Countermeasures for Ship Gyrocompass
Failures under Different Conditions
Wang Zhiming
(Zhejiang International Maritime College, Zhoushan, 316021, China)
Abstract: Gyrocompass is one of the important and essential modern marine navigation equipment. Though it seldom breaks down, once in the event of failure, it will affect the safe navigation of the ship due to its basic maintenance unable to be carried out on the ship immediately. Gyrocompass common fault diagnosis methods are given in this article. It expounds the emergency measures can be taken under the different conditions when ship sailing, to ensure the safety of navigation of the ship. Key words: gyrocompass; fault diagnosis; measures
电罗经习题集
<题目>高速旋转的三自由度陀螺仪其 进动性可描述为( )。 A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向 B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变 C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 D.在外力矩的作用下,陀螺仪主轴即能自动找北指北 <参考答案>c <题目>何谓自由陀螺仪( )。 A.重心与其中心相重合的三自由度陀螺仪 B.主轴可指向空间任意方向的陀螺仪 C.不受任何外力矩作用的平衡陀螺仪 D.高速旋转的三自由度陀螺仪 <参考答案>c
<题目>从工程技术角度,陀螺仪的定义为( )。 A.高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置 B.转子及其悬挂装置的总称 C.具有三自由度的转子 D.高速旋转的对称刚体 <参考答案>A <题目>何谓陀螺仪的定轴性( )。 A.其主轴指向地球上某一点的初始方位不变 B.其主轴动量矩矢端趋向外力矩矢端 C.其主轴指向空间的初始方向不变 D.相对于陀螺仪基座主轴指向不变<参考答案>c <题目>三自由度陀螺仪在高速转动时,其主轴将指向( ),若在垂直主轴方向上加外力矩,主轴将( )。
A.空间某一方向,产生进动 B.真北,指向真北 C.空间某一方向,保持指向不变 D.A和C对 <参考答案>A <题目>满足下列( )时,陀螺仪才具右定轴性。 A.高速旋转 B.陀螺仪中心与其重心重合 C.不受任何外力矩 D.A+B+C <参考答案>D <题目>在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进动角速度( ) A.外力矩成正比,动量矩成正比 B.外力矩成反比,动量矩成反比 C.外力矩成正比,动量矩成反比
电罗经
电罗经是根据陀螺原理制成的,根据陀螺在不受外力的作用下,保持空间指向不变的原理,制作成电罗经,电罗经的标准学名是陀螺罗经,只不过用电,大家就叫它电罗经。陀螺罗经在启动的时候,其指针指北,之后便一直指北,如果偏离指北,在重力的作用下,自动修正指北。根据陀螺马达数量及支撑马达的系统分为三大系列。分别是安修斯,斯伯列,阿芒.勃朗。一个陀螺马达及液体支撑马达的是安修斯,两个陀螺马达(马达轴向成直角)及液体支撑马达的是斯伯列,一个马达及没有液体支撑的是阿芒.勃朗。不管什么牌子、什么型号,基本上是参照这三个系列来制造。电罗经不受磁场的影响,但只能在南北纬70度以内使用,南北两极就不能使用。 关于电罗经和磁罗经电罗经(GYROCOMPASS) 有主罗经(mast gyro)、分罗经(repeater)、控制箱(control unit)以及航向记录仪(course recorder)组成。 由于船舶电罗经和自动舵基本都是配套由同一个厂家提供,主罗经的安放位置一般有如下几种方式。 1。内置式 主罗经build-in自动舵内。控制箱可以拆分后同样安装在自动舵内主罗经两侧,或者安装在驾驶室后壁。 2。放在专门罗经房 主罗经放在专用罗经房内。罗经房一般在驾驶台同层或者下一层居多。有甚者在下两层。3。分离式 主罗经放置在报房或者驾控台内部(一般这种情况,大多数自动舵也为分离式)。 现今常见的电罗经产品: 1。日本产yokogawa cmz-xxx x系列(xxx表数字,如500,700,后一个x表类别,s表单套,d表双套)。陀螺球浮于专用液体中。液体由苯甲酸,甘油,蒸馏水按照3.2g,145ml,1.6l配比混合。 2。日本产tokimec TG-XXXX x系列(x表意同前)。干球,无液体。 3。德国产retheon anschtuz std-xx (x表意同前)系列。陀螺球浮于专用液体中。配方记不住就不写了。 4。其他 如c-plath,sperry等产品相对来说用的和见的都比较少。 磁罗经(magnetic compass) 一般船舶都配备两个,一个主用,放在罗经甲板;一个备用。 用途 相比磁罗经,电罗经具有精度高,误差小等优点。尤其和配合自动夺使用自动操舵功能后,可大大节省驾驶员的时间和精力。
电罗经安修斯STD-22技术资料
安修斯电罗经STD22及标准配备分罗经技术资料 1、(1)Standard 22 Compact Gyro Compass STD22电罗经1SET 1)Performance性能标准 Type型号:STD-22,产地:ANSCHUETZ德国 Power supply电源:DC24V Automatic Speed Error Correction 自动速度误差校正 Automatic Dynamical Error Correction 自动动态误差校正 Type Approval (IMO) Including High Speed (70 knots) IMO认可,包括适用达70节高速船认 可 信号输出: 2 x NMEA or Course Bus NMEA或安修司Course总线 1 x Course Bus 安修司Course总线 4 x Status (Potential Free Contact) 状态输出(无源触点信号) Signal Input From: 信号输入: 1 x NMEA 0183 From GPS (GLL/GGA) NMEA 0183从GPS 1 x log: 200 or 400 p/NM or NMEA 0183 and Direction 200或400脉冲/海里或NMEA 0183 148-450 2)Comprising设备配置 1 Master Compasses Standard 2 2 主罗经 1 Gyrosphere 罗经球 1 Supporting Liquid and Distilled Water 支撑液和蒸馏水 1 on Board Spare Parts 船用备件 1 NMEA/Course Bus Booster 1 input/8 outputs Serial booster NMEA/course bus 数字信号分配器,1进8出 1 AC-DC Converter (115/230 V AC, 24 V DC, 240 W)电源单元 (2)ANSCHUETZ Repeater Compass 安修司航向分罗经 133-560 1SET for flush mounting* - IP 23 嵌入安装–IP23 . self synchronizing 自同步 . large compass card (150 mm) 150mm的罗经指示盘 . analogue and digital display 模拟及数字显示 . heading source indication 航向信号指示 . ANSCHüTZ course-bus system or NMEA 0183 安修司Course-bus信号或NMEA1083信号. dimmer button and anti-glare screen 调光按钮及防晕罩 (3)Bearing Repeater Compass 方位分罗经 133-407 2SETS Standard Type - IP 56 标准形式IP-56 Self Synchronizing 自同步 ? ANSCHUETZ Course Bus-System or NMEA 0183 Input 接入安修司Course总线系统或NMEA 0183 ? Large 360 Degree Compass Card 190 mm 直径为190毫米的360度读数盘 ? Incl. Dimmer 包括调光 (4)Pelorus Stand方位分罗经立式支架 2SETS For bearing repeater 133-407 incl. junction box方位分罗经立式支架,带防水接线盒
陀螺罗经
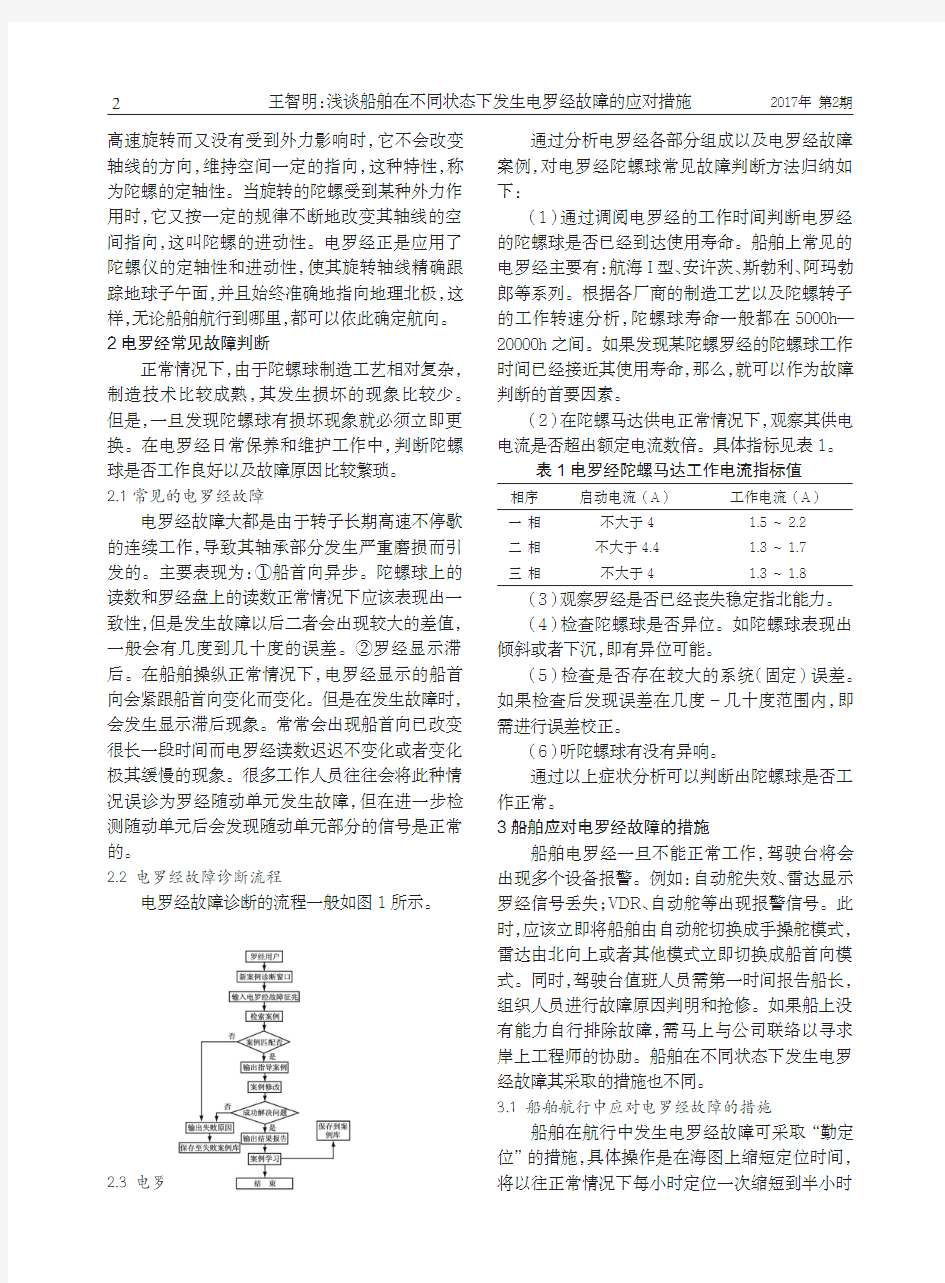
陀螺罗经 B1、安许茨4型罗经,在纬度20°处起动时达稳定指北需3h,若起动状态一样,则在纬度60°处达稳定指北的时间。 A.仍为3h B.大于3h C.小于3h D.A、B、C皆可能 A2、在北纬静止基座上,下重式罗经主轴指北端的稳定位置是。 A.子午面内水平面之上 B.子午面内水平面之下 C.子午面之东水平面之上 D.子午面之西水平面之下 B3、把自由陀螺仪改造为陀螺罗经,关键是要。 A.克服地球自转B.克服地球自转角速度垂直分量所引起的主轴视运动 C.克服地球自转角速度水平分量所引起的主轴视运动 D.克服陀螺仪的定轴性 D4、一个自由陀螺仪要成为实用的陀螺罗经,必须对其施加。 A.进动力矩和稳定力矩 B.控制力矩和稳定力矩 C.进动力矩和阻尼力矩 D.控制力矩和阻尼力矩 A5、液体连通器式陀螺罗经在起动过程中,当主轴指北端向水平面靠拢时,阻尼力矩起到的作用。 A.增进其靠拢 B.阻止其靠拢 C.不起作用 D.以上都不对 B6、下列何种陀螺罗经采用西边加重物的垂直轴阻尼法。 A.安许茨4型罗经 B.斯伯利37型罗经 C.航海1型罗经 D.阿玛一勃朗10型罗经 A7、在北纬,船用陀螺罗经在稳定位置时,为什么其主轴要在水平面之上有一高度角,主要用于产生。 A.控制力矩 B.阻尼力矩 C.动量矩 D.以上均错 B8、当陀螺罗经结构参数一定时,罗经等幅摆动的周期为84.4min所对应的纬度被称为。 A.标准纬度 B.设计纬度 C.20° D.固定纬度C9、高速旋转的三自由度陀螺仪其进动性可描述为。 A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向 B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 D.在外力矩的作用下,陀螺仪主轴即能自动找北指北 C10、舒拉条件是指当陀螺罗经的等幅摆动周期为,陀螺罗经不存在第一类冲击误差。 A.6h B.90min C.84.4min D.60min B11、陀螺罗经的阻尼因数表示主轴减幅摆动过程快慢程度,其大小在范围。 A.1~2 B.2.5~4 C.5~10 D.以上均错 D12、根据“海船航行设备规范”的要求,一般要在开航前4~6h起动陀螺罗经,这是因为。 A.罗经约经3个周期的阻尼摆动才能达到其正常工作温度 B.罗经约经3个周期的阻尼摆动才能达到其正常工作电流 C.罗经约经3个周期的阻尼摆动才能达到稳定
陀螺罗经
20世纪70年代,伴随着光纤通信技术的发展,光纤传感技术也迅速发展起来。该技术是以光波为载体,光纤为媒质,感应和传输外界被测量信号的新型传感技术,以独特的优良性能赢得极大的重视,并在各个领域中广泛应用。光纤陀螺技术是光纤传感技术的一个特例,是利用光学传输特性而非转动部件来感应角速率和角偏差的惯性传感技术。 1 光纤陀螺的结构 按照元器件类型,光纤陀螺分为分立元件型、集成光学型和全光纤型。由于分立元件型光纤陀螺存在体积较大、可靠性较差、误差较大等缺点,现在世界各国都已停止发展。集成光学型光纤陀螺将主要光学元件如耦合器、偏振器、调制器都集成在一块芯片上,将光纤线圈、光源、检测器接在芯片适当的位置,就构成了实用的集成光学型光纤陀螺。从光纤陀螺的发展方向来看,集成光学型光纤陀螺是最有发展前途的光纤陀螺形式。全光纤陀螺是将主要的光学元件都加工在一条保偏光纤上,从而可以避免因元器件连接造成的误差。目前,全光纤陀螺技术比较成熟,其性能在三种中最好,适合在现阶段研制实用的商品光纤陀螺。 根据干涉型光纤陀螺的信号检测方式的不同,可以分为开环式和闭环式两大类。开环式光纤陀螺直接检测干涉条纹的相移,因而动态范围较窄,检测精度较低。闭环式系统采取相位补偿的方法,实时抵消萨格奈克相移,使陀螺始终工作在零相移状态,通过检测补偿相位移来测量角速度,其动态范围大,检测精度高。此外,闭环式光纤陀螺对环境尤其是对振动不敏感,是研制高精度光纤陀螺仪的理想形式。开环式全光纤陀螺是中低精度、低成本光纤陀螺中比较流行的结构。目前,在中高精度光纤陀螺仪领域,最为流行的设计结构为全数字闭环式光纤陀螺仪。 光纤陀螺示意图 2 光纤陀螺的特点 光纤陀螺的主要特点是:①无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感;②结构简单,零部件少,价格低廉;③启动时间短(原理上可瞬间启动);④检测灵敏度和分辨率极高;⑤可直接用数字输出并与计算机接口联网;⑥动态范围极宽;⑦寿命长,信号稳定可靠; ⑧易于采用集成光路技术;⑨克服了因激光陀螺闭锁现象带来的负效应;⑩可与环形激光陀螺
船用陀螺罗经
目录 第一篇船用陀螺罗经 第一章陀螺罗经指北原理 (1) 第一节陀螺仪及其特性 (1) 第二节自由陀螺仪在地球上的视运动 (7) 第三节变自由陀螺仪为陀螺罗经的方法 (9) 第四节摆式罗经等幅摆动和减幅摆动 (14) 第五节电磁控制式陀螺罗经 (20) 第六节光纤陀螺罗经 (21) 第二章陀螺罗经误差及其消除 (24) 第一节纬度误差(latitude error) (24) 第二节速度误差(speed error) (25) 第三节冲击误差(ballistic error) (28) 第四节其他误差 (30) 第五章磁罗经 第一节磁的基本概念 (61) 第二节船用磁罗经 (64) 第三节磁罗经的检查、保管与安装 (66) 第四节船正平时的自差理论 (68) 第五节倾斜自差理论 (75) 第六节罗经自差校正 (77) 第七节自差的测定和自差表计算 (83) 第二篇水声导航仪器 第六章回声测深仪 (86) 第一节水声学基础 (86) 第二节回声测深仪原理 (87) 第三节回声测深仪误差 (89) 第四节IES-10型回声测深仪 (91) 第七章船用计程仪 (94) 第一节电磁计程仪 (94) 第二节多普勒计程仪 (96) 第三节声相关计程仪 (99)
第一篇 船用陀螺罗经 第一章 陀螺罗经指北原理 陀螺罗经是船舶上指示方向的航海仪器。其基本原理是把陀螺仪的特性和地球自转运动联系起来,自动地找北和指北。描述陀螺罗经指北原理所涉及的内容用式(1-1)表示: 陀螺罗经=陀螺仪+地球自转+控制设备+阻尼设备 (1-1) 第一节 陀螺仪及其特性 一. 陀螺仪的定义与结构 凡是能绕回转体的对称轴高速 旋转的刚体都可称为陀螺。所谓回 转体是物体相对于对称轴的质量分 布有一定的规律,是对称的。常见的 陀螺是一个高速旋转的转子。回转 体的对称轴叫做陀螺转子主轴,或 称极轴。转子绕这个轴的旋转称为 陀螺转子的自转。陀螺转子主轴相 当于一个指示方向的指针,如果这 个指针能够稳定地指示真北,陀螺 仪就成为了陀螺罗经。 如图1-1所示,一个陀螺用一 个内环(视其水平放置,也可称水平环)支承起来,在自转轴(主轴)水平面内,与主轴相垂直的方向上,用水平轴将内环支承在外环(垂直环)上,而外环则用与水平轴相垂直的垂直轴支承在固定环及基座上。把高速旋转的陀螺安装在这样一个悬挂装置上,使陀螺主轴在空间具有一个或两个转动自由度,就构成了陀螺仪。可以看出高速旋转的转子及其支承系统是构成陀螺仪的两个要素。 实用罗经中,陀螺仪转子的转速都是每分钟几千转到每分钟几万转。陀螺仪的支承系统应具有这样的特点,即它应保证主轴在方位上指任何方向,在高度上指示任何高度,总之,能指空间任何方向。由此,我们可以将陀螺仪概述为:陀螺转子借助于悬挂装置可使其主轴指空间任意方向,这种仪器就叫陀螺仪。 实用陀螺仪,其转子、内环及外环等相对主轴、水平轴以及垂直轴都是对称的,无论几何形体或质量都是对称的。重心与几何中心相重合的陀螺仪称为平衡陀螺仪。不受任何外力矩作用的陀螺仪称为自由陀螺仪。工程上应用的都是自由陀螺仪。陀螺仪的转子能绕1-转子;2-内环;3-外环;4-固定环;5-基座 图1-1
浅谈船舶电罗经故障情况下的航法
龙源期刊网 https://www.360docs.net/doc/c018637008.html, 浅谈船舶电罗经故障情况下的航法 作者:殷小冬 来源:《珠江水运》2014年第14期 摘要:电罗经故障在航海实践中是十分常见的事情,但在电罗经故障的情况下,如何实 现航行安全,如何抛锚,如何靠离码头,业界和学术界没有统一的指导意见和程序。本文是笔者通过自身的经历和体会,对以上问题所做的总结。 关键词:电罗经故障航行避碰抛锚走航道 电罗经是现代船舶主要导航仪器之一。电罗经的信号接入了RADAR/ ARPA/AIS/VDR/COURSE RECORD/ SATCOM等电航仪器中。因此电罗经工作是否稳定,性能是否可靠,直接关系到船舶安全。 笔者工作的船舶曾经在电罗经故障的情况下连续营运了两个多月。两个多月的时间里,在拥挤流急的巴西TUBARAO锚地抛锚起锚一次,靠离TUBARAO码头一次,经过狭窄拥挤的直布罗陀海峡一次,在繁忙拥挤的埃及亚历山大港锚地抛锚起锚一次,进靠亚历山大钢铁码头一次。两个多月里安全无事故,船舶营运正常。 一旦发现电罗经工作不正常,应立即改为手操舵,雷达显示调整到艏向上模式。在船上的技术力量确认电罗经故障且无法由船上完成修理的情况下,应立即通知公司,寻求岸基支持。同时有条件将磁罗经信号接入操舵装置的船舶,可以考虑使用自动舵。 公司根据船上提供的情况,与电罗经厂家或相关修理单位咨询之后,再给船上以修理意见或者确认船上无法完成修理,需靠码头后由岸基修理单位完成修理。 在公司确认无法由船上完成电罗经修理的情况下,如何大海航行,如何避碰,如何抛锚和如何走航道和靠码头是本文所谈的重点部分。 1.航行 大洋航行至少每小时用GPS定位,比对GPS船位和计划航线的关系,及时调整真航向。有条件尽可能测天定位比对GPS船位。 沿岸航行离岸距10海里以上时,每15分钟间隔用GPS定位,如果可利用雷达定位,雷 达定位只能用距离测位,起码要有二到三个物标,夹角要选择30度至150度之间,从而获得可靠的船位。且需不间断地测量。还可以利用测深仪实测水深比对海图水深,从而检验核对船位。
船用电罗经维护保养
电罗经基本介绍 目前船上使用最多的电罗经类型一共分为三种:安许茨4型,阿玛-勃朗10型和斯伯利MK37 MOD E型。 不论哪种罗经,使用过程中均应注意下面事项: 1.在存放,清洁和拿取陀螺球时,不能使陀螺球倾斜角度超过45°或倒置,以免润滑油沾到球内其他部件上,影响陀螺球正常工作。 2.由于液体的浮力和液体的比重有关,而液体的温度直接影响了液体的比重,所以为保证罗经正常的工作,必须保持支撑液体的恒温要求,支撑液体的工作温度为52±3℃,由液体温度控制系统控制液体保持恒温。 3.液温低于49℃时,加热器处于加热状态当液体温度达到49-52℃时,加热器断开,当液体温度达到52-57℃时,电风扇工作,当液体温度高于57℃时,蜂鸣器接通报警。此时应立即采取相应措施,对液体进行降温,若采取措施后仍不能使液体温度恢复正常,则应立即关机,停止使用。 安许茨4型陀螺罗经的启动:接通船电开关,接通变压器箱上的电源开关,由off位置转到on的位置,20分钟后,接通随动开关,由“0”位置转到“1的”位置。 安许茨4型陀螺罗经的支撑液体配方为:蒸馏水10L,甘油(20℃时,比重为1, 23g/ cm3)1L,安息香酸10g。其中,甘油用于增大液体比重,安息香酸用于导电,当液体比重不正常时,添加30ML甘油,可使支撑液的比重增加 0.0005g/cm3。反之,添加30ML蒸馏水,可使支撑液的比重减少0.0005g/cm3。 陀螺罗经的高度是:在罗经已经稳定,液温正常,罗经桌水平时,陀螺球赤道红刻线高出随动球透明玻璃块内外表面的两条水平线2mm,允许偏差为±1mm。 电罗经陀螺仪简介 电罗经最核心的是陀螺仪,配合图片简单介绍陀螺仪的构成以及各部件作用。 陀螺仪为电罗经主罗经内部,使用螺丝吊装在罗经组要电路板下方,拆下后实物如图:
斯伯利MK37型陀螺罗经简单总结
斯伯利MK37型陀螺罗经 1,灵敏部分为单转子陀螺球,采用液浮和轴承辅助支撑。 2,利用液体连通器产生水平控制力矩;陀螺房西侧阻尼重物产生垂直轴阻尼力矩。 3,采用静止逆变器提供陀螺三相电,内补尝法消除速、纬误差。 4罗经小型化,可实现快速转动。 主罗经结构 一.灵敏部分 主要由陀螺球、垂直环、液体连通器阻尼重物组成 1陀螺球: 1)寿命20000小时,内充氦气,直径165mm 2)陀螺马达:三相异步电动机 3)球的西侧有一凹槽,装随动变压器衔铁 4)底部有润滑油,用于润滑轴承 5)西侧有阻尼重物重约30g 6)陀螺球外壳有8个的配重。 2垂直环: 1)E状随动变压器:用于垂直环西侧,鱼陀螺球上的衔铁相对应构成随动信号发生器 2)E形力矩器:用于垂直环东侧,作速、纬误差校正器 3)电解液水准器:用于垂直环顶部,用于检测陀螺球的倾斜角;自动校平 4)液体连通器:用于陀螺马达主轴两端,产生控制力矩 二.随动部分 1作用:支承灵敏部分;跟踪陀螺球航向,显示在刻度盘上;给陀螺球供电 2主要组成:叉形随动环,E状随动变压器及衔铁,方位齿轮,方位电机,航向刻度盘三.固定不分 1支承板 2罗经座 3防震装置 四.误差校正器 1)速、纬误差校正装置:内补偿 2)摇摆误差:硅油粘性 3)框架误差:防震装置 电路系统 一.电源系统(静止式逆变器) 1作用:将船电变换为陀螺经所需的电115V400Hz三相交流电,马达额定转速为12000r/min。 2主要组成:整流稳压电路调谐转换电路分相电路 二.随动、传向系统 1作用:减少或消除摩擦,精确地传递主罗经的航向。 2主要部件:随动信号发生器放大器方位电机光电式步进发送器控制电路步进式分罗经 三.误差校正系统
航海仪器实操 斯伯利37型陀螺罗经
斯伯利37型罗经的使用与注意 1、快速启动罗经的方法、步骤 (1)检查项目:主罗经上的锁紧手柄应位于“锁紧”(CAGED)位置;电子控制器上的电源开关、方式转换开关应位于“切断”(OFF)位置;发送器箱上的电源开关和所有分罗经开关均应位于“切断”(OFF)位置。 (2)接通电子控制器箱上的电源开关(power),红色指示灯发亮。 (3)将工作方式转换开关置于“旋转(slew mode)”位置。 (4)根据主罗经刻度盘航向与真航向不一致的情况,将电子控制器箱上的旋转开关扳向“顺时针(CW)” 或“逆时针(CCW)”,使主罗经刻度盘航向近似等于真航向。 (5)将工作方式转换开关置于“启动(start mode)”位置,等待约10min,使陀螺电机转速达到正常转速。 (6)将锁紧手柄转至“非锁紧”(UNCAGE)位置。 (7)将工作方式转换开关指示“自动校平(automatic level mode)位置,等待约10s,使陀螺球主轴自动校平。 (8)将工作方式转换开关置于“运转“(run mode)位置,罗经进入正常启动状态,约1.5h可稳定指北。(9)接通航向发送器箱上的分罗经电源开关和分罗经开关,并核对分罗经航向是否与主罗经航向相等,若不相等,应调整分罗经航向与主罗经航向相等。 (10)将速、纬误差校正器箱上的速度旋钮(speed)指示“航行速度”,将纬度旋钮(latitude)指示与“船位纬度”相应的位置(北纬N或南纬S)。 2、关闭罗经 (1)将电子控制器箱上的工作转换开关置于“切断(off)”位置。 (2)将主罗经上的锁紧手柄转至“锁紧“位置。 (3)将航向发送器箱上的分罗经开关和分罗经电源开关置于“切断(off)”位置。 (4)将电子控制器箱上的电源开关置于“切断(off)”位置。 3、使用注意 (1)启动罗经时,当陀螺电机已经工作,可将电子控制器箱上的工作转换开关直接指示“运转/旋转(run\slew mode)”位置,使用旋转开关使主罗经刻度盘航向近似等于真航向后,再将工作转换开关指示“运转(run mode)即可。 (2)速、纬误差校正器箱上的速度旋钮和纬度旋钮,当航速变化5kn时重调一次,纬度变化5 时重调一次,并注意北纬、南纬开关的转换。 (3)启动罗经时,陀螺电机转速达到正常时应使锁紧手柄“解琐”(uncage),关闭罗经时,在切断电子控制器箱上的电源开关前应先将锁紧手柄“锁紧”(caged)。 (4)按罗经使用说明书的规定和要求对整机进行检查和维护保养,保证罗经正常工作。
百度文库罗经练习题
百度文库罗经练习题 进动性可描述为。 A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向 B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变 C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 D.在外力矩的作用下,陀螺仪主轴即能自动找北指北 c 何谓自由陀螺仪。 A.重心与其中心相重合的三自由度陀螺仪 B.主轴可指向空间任意方向的陀螺仪 C.不受任何外力矩作用的平衡陀螺仪 D.高速旋转的三自由度陀螺仪 c 从工程技术角度,陀螺仪的定义为。 A.高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置 B.转子及其悬挂装置的总称 C.具有三自由度的转子 D.高速旋转的对称刚体
A 何谓陀螺仪的定轴性。 A.其主轴指向地球上某一点的初始方位不变 B.其主轴动量矩矢端趋向外力矩矢端 C.其主轴指向空间的初始方向不变 D.相对于陀螺仪基座主轴指向不变 c 三自由度陀螺仪在高速转动时,其主轴将指向,若在垂直主轴方向上加外力矩,主轴将。 A.空间某一方向,产生进动 B.真北,指向真北 C.空间某一方向,保持指向不变 D.A和C对 A 满足下列时,陀螺仪才具 右定轴性。 A.高速旋转 B.陀螺仪中心与其重心重合 C.不受任何外力矩 D.A+B+C D 在垂直于陀螺仪主轴方向上加 外力矩,陀螺仪主轴将产生进动,其进动角速度
A.外力矩成正比,动量矩成正比 B.外力矩成反比,动量矩成反比 C.外力矩成正比,动量矩成反比 D.外力矩成反比,动量矩成正比 c 自由陀螺仪的主轴动量矩指北,若加一外力矩,其方向水平向西,则主轴指北端进动。 A.水平向东 B.水平向西 C.垂直向上 D.垂直向下 B 影响自由陀螺仪主轴不能稳定 指北的最主要因素是。 A.地球自转角速度的垂直分量 B.地球自转角速度的水平分量 C.陀螺仪本身的特性 D.在陀螺仪主轴上外加力矩 A 在北纬自由陀螺仪主轴相对于 午面向东做视运动,这是由于作用。 A 地球自转角速度 B.地球自转角速度的水平分量 C.地球自转角速度的垂直分量 D.主轴高速旋转的角速度 c
浅谈船舶在不同状态下发生电罗经故障的应对措施
1 2017年 第2期 2017年6月第13卷 第2期Jun. 2017 Vol.13 No.2浙江国际海运职业技术学院学报 JOURNAL OF ZHEJIANG INTERNATIONAL MARITIME COLLEGE 作者简介:王智明(1969—),男,浙江舟山人,浙江国际海运职业技术学院航海工程学院党总支书记。 电罗经是现代船舶上重要且必备的导航仪器,它不但能够指示比较精确的航向而且可以向诸如雷达、AIS 等其他重要设备提供罗经信号。但是,由于电罗经结构复杂,其故障发生的概率又具有不同层次的模糊、不确定性,一旦发生故障且不能及时排除,将严重影响航行,并对船舶的安全带来极大的安全隐患。针对这一情况,了解电罗经常见的故障诊断方法,研究在电罗经突发故障的情况下船舶如何应对的具体措施尤为必要。 1电罗经工作原理 电罗经(陀螺罗经)可以自动连续不断地向船舶提供航向数字信号,并通过数字放大器将航向信号分配到其他需要船首信号的设备和仪器上,例如雷达、VDR 等,从而使得船舶可以满足航行的要求。电罗经的全套设备主要包括主罗经、分罗经、复示器、电源以及控制单元,其核心指向部件是陀螺球。在陀螺不通电的时候,陀螺球可以指向任意方向,具有三自由度。当其在20000转/分 浅谈船舶在不同状态下发生电罗经故障的应对措施 王智明 (浙江国际海运职业技术学院,浙江舟山 316021) 摘 要:电罗经是现代航海的重要且必备的导航设备,虽然在航行中发生故障的情况不多,但一旦发生故障由于其基本无法随船维修势必影响船舶的安全航行。文章列举了电罗经常见的故障诊断方法,阐述了船舶在不同航行状态下发生电罗经故障时应采取的应急措施,以保证船舶航行安全。 中图分类号:U666.1 文献标志码:A 关键词:电罗经;故障诊断;措施 On Countermeasures for Ship Gyrocompass Failures under Different Conditions Wang Zhiming (Zhejiang International Maritime College, Zhoushan, 316021, China) Abstract: Gyrocompass is one of the important and essential modern marine navigation equipment. Though it seldom breaks down, once in the event of failure, it will affect the safe navigation of the ship due to its basic maintenance unable to be carried out on the ship immediately. Gyrocompass common fault diagnosis methods are given in this article. It expounds the emergency measures can be taken under the different conditions when ship sailing, to ensure the safety of navigation of the ship. Key words: gyrocompass; fault diagnosis; measures
电控罗经论文
电磁控制式陀螺罗经 学员十一队一班二组 作者:朱东波杨波陈佳骏钱辉熊勇林 【摘要】本文将对电磁控制式陀螺罗经进行研究,主要对电磁控制式陀螺罗经的特点、工作原理、组成、使用与维护等方面进行论述,并举例阿玛勃朗MK10型,SGB1000型罗经进行具体说明来进行论述。作为航海专业的学员,深入研究陀螺罗经是相当有必要的,它对提高我们的专业素质有很大帮助。 【关键字】电磁控制式陀螺罗经阿玛勃朗MK10型罗经 SGB1000型罗经主罗经结构电路系统操作使用 1 引言:通过查阅文献,讨论研究的方法,了解电磁控制罗经的工作原理,结构,技术性能,使用维护与保养,以此论文促进学员对陀螺罗经的进一步学习研究,为下一步舰艇工作打下良好基础。 2 电磁控制式陀螺罗经 2.1电磁控制式陀螺基本结构
①平衡陀螺仪(三个自由度) ②电磁摆 ③放大器 ○4力矩器 2.2 电磁控制式陀螺基本原理 控制力矩——水平轴MY=-KYθ 阻尼力矩——垂直轴MZ =KZθ 当主轴高度角存在时,电磁摆输出摆信号,经放大器放大后,驱动力矩器产生水平轴和垂直轴力矩,控制主轴找北并 指北.
2.3 数学分析 当陀螺球处于稳定位置时, 陀螺主轴稳定点: ——纬度误差 1、阻尼因数f = α n/ α n+1d k e ωπ= 2、阻尼周期 3 阿玛勃朗MK10型罗经 3.1 阿玛勃朗MK10型罗经的工作原理: ωθ αωθθωα?????=---=+z 1y 2)()(K H K H 则有:此时,令,,,0r r θθααθα==== ???????-=-=y 2 y z K H tg K K r r ωθ?α2z 1y d 442K HK H T D -==ωπωπ
磁罗经校正方法
在磁赤道校正磁罗经自差纪实 作者:吴亚军浏览次数:1947 磁罗经是船舶航行的重要仪器之一,在PSC的检查中,如果它存在缺陷或自差表不在有效期内,将会给予17(开航前纠正)或30(滞留)的纠正措施。本人上船后,发现本船的罗经自差表已接近一年的有效期,且与电罗经比对,发现磁罗经自差较大,有的航向上的自差已近10o,大大超过了标准罗经自差不大于3o的标准。由于早有准备自行校正自差,故在航行遇到船舶摇摆时先进行了倾斜自差的校正,其经过是这样的:11月20日,本船在台湾海峡,遇到1 020高气压线,船舶左右摇摆约15o,水手利用电罗经操舵时,发现磁罗经左右偏转较频繁,不易稳定,故判定这是由于磁罗经的倾斜自差没有消除好而产生的,便打开罗经柜,自行调节,将垂直校正磁棒向上提高了3厘米,使船在左右摇摆中使罗经指向稳定,固定好校正磁棒后,用一小卡片记下了磁棒的位置、校正地点(经度、纬度)、日期,以便“故地重游”经过该纬度后,将垂直磁棒再一次放回原处。 倾斜自差的校正后,需要校正半园自差和象限自差,由于船上没有设备,校正自差时既要利用简便的,准确的,精度高的“爱利”法校正,海况要好,还要不影响航期,于是,利用了船在磁赤道及附近的航行时校正磁罗经自差,以后再寻找机会利用佛氏铁校正软半园自差。 一、校正前的准备工作 11月27日,本轮开往新加坡,香港开航后。本船的吃水差与往常一样,约为0.15米,经计算,经过磁赤道的时间约为11月29日0800,根据气象传真图分析,该地区的海况良好,几乎为无风无浪,故在前一天晚上作了如下的准备: 1.较为精确地推算出本船要经过的磁差为0o的磁赤道的地理纬度17oN,113.o5E。 2.检查并用备用酒精消除了罗盆内的气泡,对罗经架、罗经柜、磁棒作了卫生清理工作,对常平环等活络部件进行了加油润滑。 3.分别在N航向对佛氏铁进行了上下颠倒,在E航向对两软铁球进行了旋转半周,发现罗经的读数几乎不变,说明它没有被磁化。 4.用小磁棒进行了半周期和灵敏度的检查,发现它们均在允许范围以内。 5.调整好电罗经的纬度修正值,利用GPS等定位仪器,多测船位,测定了电罗经的误差(+0.1o)。 6.检查了磁罗经的备件箱,发现如方位针等备品齐全,且符合要求。 7.利用《航海天文历》查出校正当天的太阳的赤纬,列表计算出校正时的太阳影子的磁方位即影方位,以便备用和参考。 8.记下了校正前各校正器的数量,位置及放置方向。 9.将第二天的工作计划好。(1)备妥两台雷达,准备好OQ旗、对讲机,用VHF与周围船舶联系,
电罗经
斯伯利37型 一、开机前的检查: (1)船电开关、控制与发送器箱上的“转换开关”和“电源开关”是否位于off 位置。 (2)校对分罗经的航向与主罗经的航向一致。 二、开机步骤P49-50 (1)接通船电开关; (2)将电子控制箱上的电源开关接通,指示灯亮; (3)将方式转换开关置于旋转(SLEW)位置; (4)调整旋转开关使主罗经刻度盘的指示与船舶航向±30°的位置; (5)将方式转换开关置于启动(START)位置,等十分钟后再操作; (6)将方式转换开关置于自动校平(AUTOLEVEL)置,等30秒钟后再操作;(7)将方式转换开关置于运转(RUN)位置; (8)接通发送器电源开关;校对分罗经的航向与主罗经一致;接通分罗经开关(9)调整纬度旋钮到船舶所在的航行纬度上; (10)调整速度旋钮到船舶所在的航速上。 三、关机步骤 四、日常的检查:P52 (1)N/S纬度开关应调到与船舶所在的纬度上。 (2)纬度和速度旋钮应调到船舶所在的纬度和速度上,纬度每变化5度,速度每变化5节时应及时调整。 (3)检查罗经是否存在固定误差,并及时进行调整。 (4)检查主罗经与分罗经航向是否一致,不一致需要调整匹配。 阿玛-勃朗10型罗经 一、起动前的检查: (1)船电开关是否在断开的位置; (2)开关接线箱上电源开关和分罗经开关是否在断开的位置; (3)主罗经控制面板上的电源开关是否在断开的位置; (4)主罗经控制面板上的照明旋钮是否在断开的位置; (5)旋转速率的指针标记位于垂直向上的位置。 二、开机步骤 (1)接通船电开关; (2)接通开关接线箱上的电源开关,变流机工作; (3)使分罗经航向与主罗经航向一致,接通分罗经开关; (4)接通主罗经控制面板上的电源开关,指示灯亮; (5)等十分钟后进行如下操作: 调整纬度旋钮使其位于与船舶所在纬度同名位置;调整速度旋钮使其位于与船速相同; (6)利用方位按钮和旋转速率旋钮调整主罗经航向刻度盘的读数,使其接近船