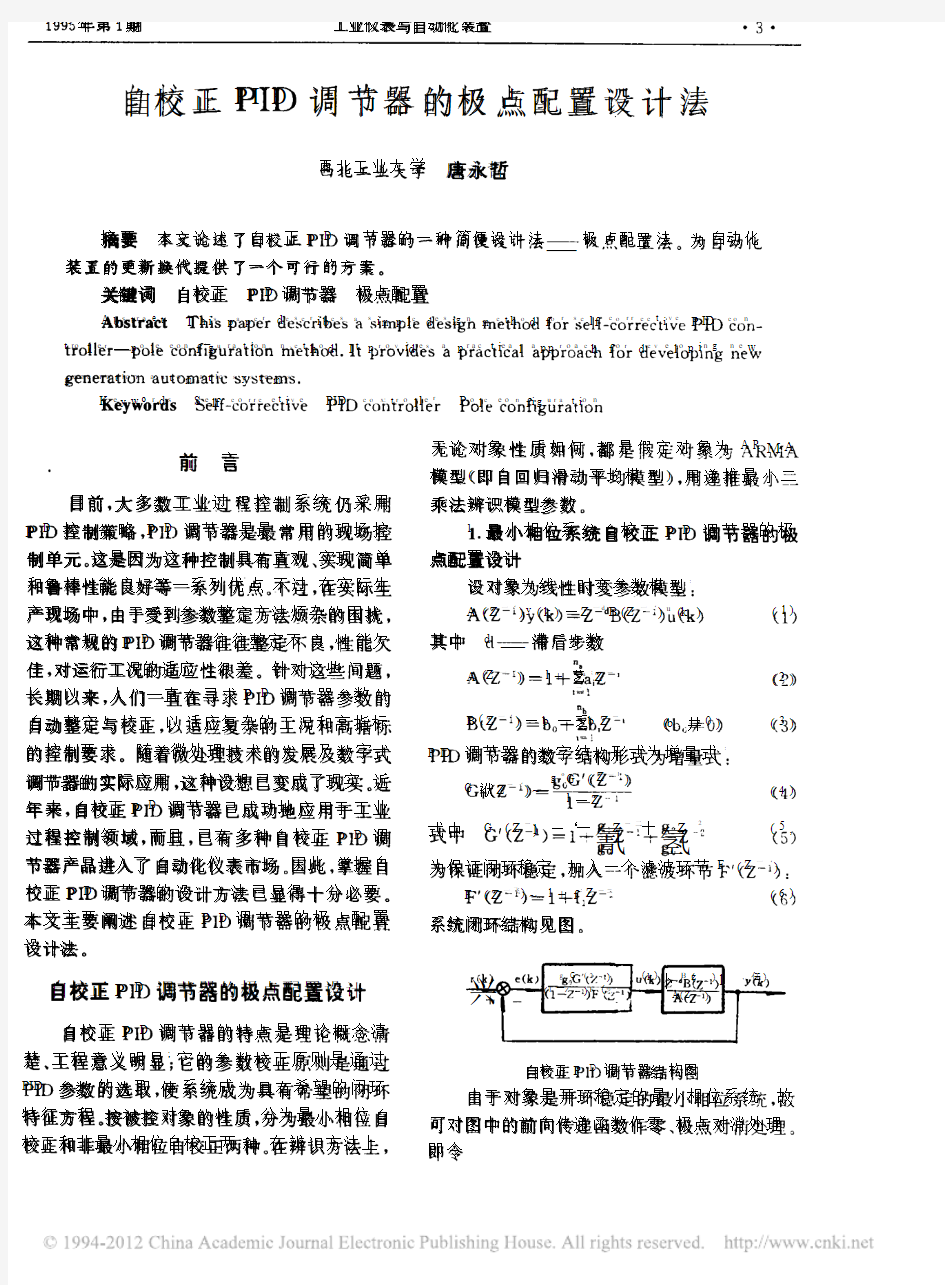
自校正PID调节器的极点配置设计法

实验 6 极点配置与全维状态观测器的设计(优.选)
实验 6 极点配置与全维状态观测器的设计 一、实验目的 1. 加深对状态反馈作用的理解。 2. 学习和掌握状态观测器的设计方法。 二、实验原理 在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。 K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。 [K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。 三、实验内容 1.已知系统 (1)判断系统稳定性,说明原因。 (2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。 (3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置? (4)使用状态反馈进行零极点配置的前提条件是什么? 1. (1) (2) 代码: a=[-2 -1 1;1 0 1;-1 0 1]; b=[1,1,1]'; p=[-1,-2,-3]'; K=acker(a,b,p) K = -1 2 4 (3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置?
在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。 (4)使用状态反馈配置极点的前提是系统的状态是完全可控的。 2.已知系统 设计全维状态观测器,使观测器的极点配置在12+j,12-j 。 (1)给出原系统的状态曲线。 (2)给出观测器的状态曲线并加以对比。(观测器的初始状态可以任意选取)观察实验结果,思考以下问题: (1)说明反馈控制闭环期望极点和观测器极点的选取原则。 (2)说明观测器的引入对系统性能的影响。 (1)A=[0 1;-3 -4]; B=[0;1]; C=[2 0]; D=[]; G=ss(A,B,C,D); x=0:0.001:5; U=0*(x<0)+1*(x>0)+1*(x==0); X0=[0 1]'; T=0:0.001:5; lsim(G,U,T,X0);
控制器极点配置方法
控制器极点配置方法 如果已知系统的模型或传递函数,通过引入某种控制器,使得闭环系统的极点可以移动到指定的位置,从而使系统的动态性能得到改善。这种方法称为极点配置法。 例6-12 有一控制系统如图6-38,其中,要求设计一个控制器,使系统稳定。 图6-38 解:(1)校正前,闭环系统的极点: > 0 因而控制系统不稳定。 (2)在控制对象前串联一个一阶惯性环节,c>0,则闭环系统极点: 显然,当,时,系统可以稳定。但此对参数c 的选择依赖于 a 、b 。因而,可 选择控制器,c 、d ,则有特征方程: 当,时,系统稳定。 本例由于原开环系统不稳定,因而不能通过简单的零极点相消方式进行控制器的设计,其原因在于控制器的参数在具体实现中无法那么准确,从而可能导致校正后的系统仍不稳定。 例6-13 已知一单位反馈控制系统的开环传递函数:
要求设计一串联校正装置Gc(s) ,使校正后系统的静态速度误差系统,闭环主导极点在 处。 解:首先,通过校正前系统的根轨迹可以发现,如图6-39所示,其主导极点为: 。 图6-39 为使主导极点向左偏移,宜采用超前校正装置。 (2)令超前校正装置,可采用待定系数法确定相关参数: 又
其中、、、为待定系数。 进一步可得: 即 将代入式子可以得到:,,,。进一步可得超前校正装置的传递函数: 校正后系统的根轨迹如图6-39所示。 该校正装置与例6-7中由超前装置获取的校正装置结果基本相同,说明结果是正确的。 在matlab中,亦有相应的命令可进行极点配置,主要有三个算法可实现极点配置算法:Bass-Gura算法、Ackermann 算法和鲁棒极点配置算法。这些算法均以状态空间进行表征,通过设定期望极点位置,获取状态反馈矩阵K。下面通过示例介绍其中的一种算法。 例6-14 考虑给定的系统,其状态方程模型如下:
基于极点配置的控制器设计与仿真
计算机控制理论与设计作业 题目:基于极点配置方法的直流调速系统的控制器设计
摘要 本文目的是用极点配置方法对连续的被控对象设计控制器。基本思路是对连续系统进行数学建模,将连续模型进行离散化,针对离散的被控对象,用极点配置的方法分别在用状态方程和传递函数两种描述方法下设计前馈和反馈控制器,并用MATLAB仿真。文中具体以直流调速系统作为研究对象,对直流调速系统的组成和结构进行了分析,把各个部分进行数学建模,求出其传递函数,组成系统结构框图,利用自控原理的知识对结构图化简,求出被控对象的传递函数和状态方程,进一步得将其离散化。第一种是通过极点配置设计方法的原理,用状态方程设计被控对象的控制律,因为直流调速系统存在噪声,实际状态不可测,故选择了全阶的观测器,又因为采样时间小于计算延时,所以选择了预报观测器。利用所学知识对此闭环系统设计前馈和反馈控制器[1]。第二种利用传统的离散传递函数,从代数多项式的角度进行复合控制器的设计,在保证系统稳定的情况下,分析系统的可实现性,稳定性,静态指标,动态指标,抗干扰等方面性能研究前馈反馈相结合控制器设计。重点是保证被控对象的不稳定的零极点不能被抵消。最后利用MATLAB的Simulink进行仿真,观察系统的输出的y和u和收敛性,并加入扰动看其抗干扰性能,得出结论。 经研究分析,对于直流调速系统,基于极点配置设计的前馈反馈相结合的控制器,具有良好的稳定性能和抗干扰性能。运行结果符合实际情况。 关键词:极点配置;状态方程;直流调速系统;代数多项式;Matlab;
1绪论 1.1论文的背景及意义 在工业生产和日常生活中,自动控制系统分为确定性系统和不确定性系统两类,确定性系统是指系统的结构和参数是确定的,确定的输入下,输出也确定的一类系统。确定性系统相对于不确定性系统而言的。在确定的系统中所用的变量都可用确切的函数关系来描述,系统的运动特性可以完全确定。以确定性系统为研究对象的控制理论称为确定性控制理论。本文以直流调速系统为研究对象,利用极点配置的设计方法,包括利用状态空间模型和传递函数模型分别描述线性系统,采用闭环极点为指标的控制器设计的理论和方法,设计出前馈和反馈控制器,组建闭环控制系统,用Matlab进行仿真可以逼真地还原出实际系统。 1.2 论文的主要内容 本文直流电机的调速系统的模型作为研究对象,利用线性系统极点配置的设计方法,设计前馈反馈控制器。论文研究的主要内容: (1)阅读学习国内外期刊文献,研究了极点配置的基本原理和Matlab的实现方法。 (2)系统的说明直流电机的系统结构和工作原理并分析,建立直流调速系统的数学模型,将其进行离散化,并讨论其传递函数与状态方程之间的关系。 (3)分析极点配置控制器的设计原理,利用状态方程设计控制器。 (4)将被控对象的传递函数离散化,利用传递函数模型设计控制器。 (4)在MATLAB中建立闭环直流调速系统的模型,根据闭环极点配置的设计步骤编写程序,用Simulink搭建仿真系统,对闭环直流调速系统的输出进行仿真分析。 (5)对仿真结果分析。将仿真结果与实际直流调速系统的阶跃响应的各项参数相比较,得出结论。
倒立摆状态空间极点配置控制实验实验报告
《现代控制理论》实验报告 状态空间极点配置控制实验 一、实验原理 经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型,现代控制理论主要是依据现代数学工具,将经典控制理论的概念扩展到多输入多输出系统。极点配置法通过设计状态反馈控制器将多变量系统的闭环系统极点配置在期望的位置上,从而使系统满足瞬态和稳态性能指标。 1.状态空间分析 对于控制系统X = AX + Bu 选择控制信号为:u = ?KX 式中:X 为状态向量( n 维)u 控制向量(纯量) A n × n维常数矩阵 B n ×1维常数矩阵 求解上式,得到 x(t) = (A ? BK)x(t) 方程的解为: x(t) = e( A?BK )t x(0) 状态反馈闭环控制原理图如下所示: 从图中可以看出,如果系统状态完全可控,K 选择适当,对于任意的初始状态,当t趋于无穷时,都可以使x(t)趋于0。 2.极点配置的设计步骤 1) 检验系统的可控性条件。 2) 从矩阵 A 的特征多项式 来确定 a1, a2,……,an的值。 3) 确定使状态方程变为可控标准型的变换矩阵 T:T = MW 其中 M 为可控性矩阵, 4) 利用所期望的特征值,写出期望的多项式 5) 需要的状态反馈增益矩阵 K 由以下方程确定: 二、实验内容 针对直线型一级倒立摆系统应用极点配置法设计控制器,进行极点配置并用Matlab进行仿真实验。 三、实验步骤及结果 1.根据直线一级倒立摆的状态空间模型,以小车加速度作为输 入的系统状态方程为: 可以取1 l 。则得到系统的状态方程为: 于是有:
直线一级倒立摆的极点配置转化为: 对于如上所述的系统,设计控制器,要求系统具有较短的调整时间(约 3 秒)和合适的阻尼(阻尼比? = 0.5)。 2.采用四种不同的方法计算反馈矩阵 K。 方法一:按极点配置步骤进行计算。 1) 检验系统可控性,由系统可控性分析可以得到,系统的状态完全可控性矩阵的秩等于系统的状态维数(4),系统的输出完全可控性矩阵的秩等于系统输出向量y 的维数(2),所以系统可控。 倒立摆极点配置原理图 2) 计算特征值 根据要求,并留有一定的裕量(设调整时间为 2 秒),我们选取期望的闭环极点s =μi (i = 1,2,3,4) ,其中: 其中,μ 3,μ 4 使一对具有的主导闭环极点,μ 1 ,μ 2 位于 主导闭环极点的左边,因此其影响较小,因此期望的特征方程为: 因此可以得到: 由系统的特征方程: 因此有 系统的反馈增益矩阵为: 3) 确定使状态方程变为可控标准型的变换矩阵 T:T = MW 式中: M = 0 1.0000 0 0 1.0000 0 0 0 0 0.7500 0 5.5125 0.7500 0 5.5125 0 W = 0 -7.3500 -0.0000 1.0000 -7.3500 -0.0000 1.0000 0 -0.0000 1.0000 0 0 1.0000 0 0 0 于是可以得到: T = -7.3500 -0.0000 1.0000 0 0 -7.3500 -0.0000 1.0000 0 -0.0000 0.7500 0 -0.0000 0 -0.0000 0.7500 T’= -7.3500 0 0 -0.0000 -0.0000 -7.3500 -0.0000 0 1.0000 -0.0000 0.7500 -0.0000 0 1.0000 0 0.7500
基于输出反馈的区域极点配置
第22卷第2期南 京 理 工 大 学 学 报Vol.22No.21998年4月 Journal of Nanjing University of Science and Technology Apr.1998 基于输出反馈的区域极点配置 X 王子栋X X 郭 治 (南京理工大学信息学院,南京210094)摘要 该文研究输出反馈情形下线性定常连续及离散系统区域极点配置的统一代数刻划问题,即利用完全参数化方法,设计输出反馈控制器,使闭环极点配置于指定圆形区域内。文中导出了期望输出反馈控制器存在的充要条件,并进一步给出了这类控制器的全部参数化刻划。最后,得到了若干有益的推论,包括线性离散及连续系统稳定化控制器的统一代数表示等。 关键词 线性系统,输出反馈,极点配置,参数法,代数刻划 分类号 TP 202.1,T P 214.1 众所周知,线性定常系统的稳态及动态特性直接受其极点所在位置的影响,因而极点配置问题一直是控制理论研究中基本而重要的课题之一,其在工程实践中也具有明显的应用背景,如飞行控制系统的设计以及柔性结构的振动控制等[1]。迄今为止,精确极点的配置问题已得到了很好的研究。在过去的十年中,区域极点的配置问题也开始受到充分的注意,涌现出一批成果[2][3]。 目前,区域极点配置的相关文献中的大部分均是针对某性能指标给出具体的设计方法,且均集中于状态反馈情形,缺乏一定的通用性。本文对连续及离散线性定常系统使用统一的代数方法,给出了配置闭环极点至给定圆形区域的输出反馈控制器的全部参数化刻划,为区域极点配置问题提供了一条具有理论意义及应用价值的新途径。 1 问题的描述 考虑线性定常连续系统x a (t )=A x (t )+B u (t ),y (t )=Cx (t )及线性定常离散系统x (k +1)=A x (k )+Bu (k ),y (k )=Cx (k ),其中x ∈R n 为状态,u ∈R m 为控制输入,y ∈R p 为测量输出,A 、B 、C 为适维已知常数阵。(A ,B )及(A ,C )分别为可控和可观的。 考虑圆形区域D (A ,r ),其中在连续时间情形D (A ,r )表示圆心在A +j 0(A <0)处、半径为r (r <-A )的圆,在离散时间情形D (A ,r )表示单位圆内圆心位于A +j 0、半径为r 的圆。这里均考虑复平面。 X X XX 王子栋 男 32岁 副教授 国家自然科学基金及高校博士学科点专项科研基金资助项目 本文于1997年1月14日收到
PID调节器的调节过程及其参数的整定方法
摘要 锅炉汽包水位是锅炉运行中的一个重要的监控参数,它间接反映了锅炉蒸汽负荷与给水流量之间的平衡关系。汽包锅炉给水自动控制的任务是使锅炉的给水量适应锅炉的蒸发量,以维持汽包水位在规定的范围内。由于给水系统的复杂性,现有的火电厂全程给水控制采用传统的PID控制,其精确数学模型难以建立,并且系统具有大滞后、时变性等一系列特点,往往难以满足火电机组复杂工况要求,所以许多大型火电厂对现有的全程给水控制提出了优化方案。 本文首先对控制系统进行时域分析,然后介绍PID调节器的调节过程及其参数的整定方法。重点分析了锅炉的给水控制系统,针对汽包水位控制对象的动态特性表现为有惯性、无自平衡能力的特点,采用先进的智能控制算法之一的模糊控制对其进行控制,并利用MATLAB分别对常规PID控制和模糊PID 串级控制进行仿真,结果表明采用模糊PID串级控制方法比常规PID控制方法迟延小、超调量小,使得汽包的动态特性得到优化。 关键词:模糊控制;给水控制;PID控制
Abstract The steam drum water level of boil is important monitoring parameter in a boiler movement, it had reflected indirectly the balance relations between the boiler steam load and the discharge of water. In the steam drum boiler for the water automatic control duty to adapt the boiler transpiration rate for the water volume, maintains the steam drum water level in the stipulation scope. As a result of for the water system complexity, the existing thermoelectric power station entire journey for the water control adopt the traditional PID control, its precise mathematical model establishes with difficulty, when the system has the big lag, denatured and so on a series of characteristics, often with difficulty satisfies the thermal power unit complex operating mode request, therefore many large-scale thermoelectric power stations proposed the optimization plan to the existing entire journey for the water control. First this article has analyzed the time domain of control system, then introduces the PID regulator’s adjustment process and the parameter installation method. And has analyzed great emphasis on the boil for the water control system, the steam drum water control object show the inertia, the non-self regulation ability, uses of a fuzzy control to control it, and separately carries on the simulation using MATLAB to the tradition PID control and the fuzzy PID cascade control, With comparing using the fuzzy PID cascade control method obtain result that is delay slightly, over small, enables the steam drum the dynamic characteristic to obtain the optimization. Keywords: Fuzzy control; For the water control; PID control
7状态空间设计法极点配置观测器解析
第7章线性定常离散时间状态空间设计法 7.1引言 7.2状态反馈配置极点 7.3状态估值和状态观测器 7.4利用状态估值构成状态反馈以配置极点 7.5扰动调节 7.6无差调节
7.1 引言 一个被控对象: (1)()()()() ():1,():1,:,:,:x k Fx k Gu k y k Cx k x k n u k m F n n G n m C r n +=+?? =?????? 7.1 当设计控制器对其控制时,需要考虑如下各因素: ● 扰动,比如负载扰动 ● 测量噪声 ● 给定输入的指令信号 ● 输出 如图7.1所示。 给d L (k )扰动 图7.1 控制系统示意图 根据工程背景的不同,控制问题可分为调节问题和跟踪问题,跟踪问题也称为伺服问题。 调节问题的设计目标是使输出迅速而平稳地运行于某一平衡状态。包括指令变化时的动态过程,和负载扰动下的动态过程。但是这二者往往是矛盾的,需要折衷考虑。 伺服问题的设计目标是对指令信号的快速动态跟踪。 本章研究基于离散时间状态空间模型的设计方法。 7.2研究通过状态变量的反馈对闭环系统的全部特征值任意配置——稳定性与快速线。 7.3考虑当被控对象模型的状态无法直接测量时,如何使用状态观测器对状态进行重构。 7.4讨论使用重构状态进行状态反馈时闭环系统的特征值。 7.5简单地讨论扰动调节问题。 7.6状态空间设计时的无差调节问题。
7.2 状态反馈配置极点 工程被控对象如式7.1,考虑状态反馈 ()()()u k v k Lx k =+ 7.2 如图7.2所示。式7.2带入式7.1,得 (1)()()()() ()()()x k Fx k Gu k y k Cx k u k v k Lx k +=+?? =??=+? 7.3 整理得 ()(1)()() ()()x k F GL x k Gv k y k Cx k +=++?? =? 7.4 (k ) v (k ) 图7.2 状态反馈任意配置闭环系统的极点 闭环系统的特征方程为 []det ()0zI F GL -+= 7.5 问题是在什么情况下式7.5的特征根是可以任意配置的?即任给工程上期望的n 个特征根λ1, λ2, ..., λn ,有 []1det ()()0n i i zI F GL z λ=-+=-=∏ 7.6 定理:状态反馈配置极点
PID调节器说明书
RKC日本理化CD系列PID调节器 在工业生产中,通常需要把某递增物理量(如温度\压力\流量\液位等)维持 在指定的数值上.当这些物理量偏离所希望的给定值时,即产生偏差.PID控制仪根据测时信号与给定值,达到自动控制的效果. 模拟PID 比例运算是指输出控制量与偏差的比例关系.仪表比例参数的设定值越大, 控制的灵敏度越高.例如仪表的比例参数P设定为4%,表示测量值偏离给定值4%时,输出控制量变化100% 积分运算的目的是消除静差.只要在偏差存在,积分作用将控制量向使偏差 消除的方向移动.积分时间是表示积分作用强度的单位.仪表设定的积分时间越短,积分作用越强.例如仪表的积分时间设定为240秒时,表示对固定折偏差,积分作用的输出量达到和比例作用相同的输出量需要240秒 比例作用的积分作用是对控制结果的修正动作,响应较慢.微分作用是为了 消除其缺点而补充的,微分作用根据偏差产生的速度对输出量进行修正,使控制过程尽快回到原来的控制状态,微分时间是表示微分作用强度的单位,仪表设定的微分时间越长,则以微分作用进行的修正越强. 位式PID控制 一般PID控制是把连续的电流或电压输出到操作器对系统进行量化控制.而位式PID控制则是仪表按一定的周期,通过控制接点的通断对系统进行控制.在一个周期内,接点的接通和断开的时间长短反映控制量的大小,操作时为100%时,接点在整个周期内完全接通,操作量为0%时,接点在整个周期内完全断开. RKC型号定义 请参照下列代码表确认产品是否与您指定的型号一致 CD□□□□□□* □□□□ 1 2 3 4 5 6 7 8 9 10 1、规格尺寸 48*48*100(开口:45*45) 48*96*100(开口:45*92) 72*72*100(开口:68*68) 96*96*100(开口:92*92) 2、控制类型: F:PID动作及自动演算(逆动作)
基于极点配置方法的直流电机转速控制系统设计
摘要 建模、控制与优化是控制理论要解决的主要问题。在这些问题中,广泛采用了现代数学方法,使得控制理论的研究不断深入,取得了丰硕的成果。建模是控制理论中所要解决的第一个问题。控制理论中的建模方法主要有两种,一是经验建模,二是根据物理规律建模。所研究的对象主要是动态模型,一般用微分方程或差分方程来描述。设计控制系统是控制理论的核心内容。在线性系统中,我们所用到的数学工具是拓扑、线性群。在非线性系统中,我们用到了微分几何。可以说微分几何是非线性控制理论的数学基础。优化是控制的一个基本目的,而最优控制则是现代控制理论的一个重要组成部分。例如庞特里亚金的极大值原理、贝尔曼的动态规划,都是关于优化和最优控制问题的。 本报告首先介绍了直流电动机的物理模型, 并测量计算了它的具体参数。然后根据牛顿第二定律和回路电压法分别列写运动平衡方程式和电机电枢回路方程式,从而通过一些数学变换抽象出了以电压为输入、转速为输出、电流和转速为状态变量的数学模型。通过对抽象出来的模型进行性能分析,确定需要使用状态观测器来修正系统。继而借助MATLAB软件对转速环进行了状态反馈控制器的设计,使系统的阶跃响应达到了设计指标。 关键词:建模控制理论设计控制系统直流电动机转速状态反馈控制器
1 系统的物理模型、参数及设计要求 -------------------- 4 1.1 系统模型 ------------------------------------- 4 1.2 系统参数 ------------------------------------- 5 1.3 设计要求 ------------------------------------- 5 2 系统模型的建立------------------------------------ 6 2.1 模型抽象 ------------------------------------- 6 2.2 所建模型的性能分析 --------------------------- 7 3 系统状态观测器的设计----------------------------- 11 3.1 期望配置的极点的确定以及状态观测器的设计----- 11 3.1.1 第一组极点配置-------------------------- 11 3.1.2 第二组极点配置-------------------------- 11 3.2 状态观测器的设计 ---------------------------- 12 3.2.1 第一组极点------------------------------ 12 3.2.2 第二组极点------------------------------ 14 3.3 状态观测器的仿真图 -------------------------- 16 3.4 原系统加了状态观测器后的仿真结果图及分析----- 17 3.4.1 第一组极点------------------------------ 17 3.4.2 第二组极点------------------------------ 18 4 状态观测器极点配置与PID方法的比较 --------------- 20 4.1 直流电机转速、电流PID控制的设计------------- 20 4.2 两种方法的比较 ------------------------------ 21
极点配置直接自校正控制最小相位确定性系统Word文档
%极点配置直接自校正控制(最小相位确定性系统) 设被控对象为开环不稳定最小相位系统: ()2(1) 1.1(2)(3)0.5(4)y k y k y k u k u k --+-=-+- 期望传递函数分母多项式为: 112()1 1.32050.4966m A z z z ---=-+ 取遗忘因子=1,期望输出y r (k )为幅值为10的方波信号。 clear all;close all; a=[1 -2 1.1];b=[1 0.5];d=3; %对象参数 Am=[1 -1.3 0.5]; %期望闭环特征多项式 na=length(a)-1;nb=length(b)-1; nam=length(Am)-1; nf=nb+d-1;ng=na-1; %确定多项式A0 na0=2*na-nam-nb-1; %观测器最低阶次 A0=1; for i=1:na0 A0=conv(A0,[1 0.3-i*0.1]); %生成观测器 end AA=conv(A0,Am);naa=na0+nam;
nfg=max(naa,max(nf,ng)); %用于ufk, yuf更新 nr=na0; %R的阶次 L=400; uk=zeros(d+nb,1); ufk=zeros(d+nfg,1); %滤波输入的初值 yk=zeros(max(na,d),1); yfk=zeros(d+nfg,1); yrk=zeros(max(na,d),1); yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)] ; %RELS初值设定 thetae_1=0.001*ones(nf+ng+2,1); P=10^6*eye(nf+ng+2); lambda=1; %遗忘因子 for k=1:L time(k)=k; y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb); ufk(d)=-AA(2:naa+1)*ufk(d+1:d+naa)+uk(d); %滤波输入输出
控制系统的极点配置设计法
控制系统的极点配置设计法 一、极点配置原理 1.性能指标要求 2.极点选择区域 主导极点: 2 11 1 cos tan ξ βξ ξ -- - == 图3.22 系统在S平面上满足 时域性能指标的范围 n s t ζω 4 = ;当Δ=0.02时,。 n s t ζω 3 = 当Δ=0.05时,
3.其它极点配置原则 系统传递函数极点在s 平面上的分布如图(a )所示。极点s 3距虚轴距离不小于共轭复数极点s 1、s 2距虚轴距离的5倍,即n s s ξω5Re 5Re 13=≥(此处ξ,n ω对应于极点s 1、s 2) ;同时,极点s 1、s 2的附近不存在系统的零点。由以上条件可算出与极点s 3所对应的过渡过程分量的调整时间为 135 1 451s n s t t =?≤ ξω 式中1s t 是极点s 1、s 2所对应过渡过程的调整时间。 图(b )表示图(a )所示的单位阶跃响应函数的分量。由图可知,由共轭复数极点s 1、s 2确定的分量在该系统的单位阶跃响应函数中起主导作用,即主导极点。因为它衰减得最慢。其它远离虚轴的极点s 3、s 4、s 5 所对应的单位阶跃响应衰减较快,它们仅在极短时间内产生一定的影响。因此,对系统过渡过程进行近似分析时。可以忽略这些分量对系统过渡过程的影响。 n x o (t) (a ) (b ) 系统极点的位置与阶跃响应的关系
二、极点配置实例 磁悬浮轴承控制系统设计 1.1磁悬浮轴承系统工作原理 图1是一个主动控制的磁悬浮轴承系统原理图。主要由被悬浮转子、传感器、控制器和执行器(包括电磁铁和功率放大器)四大部分组成。设电磁铁绕组上的电流为I0,它对转子产生的吸力F和转子的重力mg相平衡,转子处于悬浮的平衡位置,这个位置称为参考位置。 (a)(b) 图1 磁悬浮轴承系统的工作原理 Fig.1 The magnetic suspension bearing system principle drawing 假设在参考位置上,转子受到一个向下的扰动,转子就会偏离其参考位置向下运动,此时传感器检测出转子偏离其参考位置的位移,控制器将这一位移信号变换成控制信号,功率放大器又将该控制信号变换成控制电流I0+i,控制电流由I0增加到I0+i,因此,电磁铁的吸力变大了,从而驱动转子返回到原来的平衡位置。反之,当转子受到一个向上的扰动并向上运动,此时控制器使得功率放大器的输出电流由I0,减小到I0-i,电磁铁的吸力变小了,转子也能返回到原来的平衡位置。因此,不论转子受到向上或向下的扰动,都能回到平衡状态。这就是主动磁轴承系统的工作原理。即传感器检测出转子偏移参考点的位移,作为控制器的微处理器将检测到的位移信号变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力从而使转子维持其悬浮位置不变。悬浮系统的刚
PID调节器
PID调节器 一、设计要求 比例系数、积分时间、微分时间可调,参数自定义。 P、PI、PD、PID可分别设置。 二、设计方案 模拟式PID调节器得电路结构 比例、积分、微分电路经过不同得组合、变换可得到三种不同得结构形式。它们具体如下:结构一:一体式模拟PI D调节电路结构。顾名思义,“一体”即将比例积分微分三者合为一体,用单一结构实现P ID调节功能,其结构限制了其只能实现PID这一单一得调节功能,并且,在调节过程中,无法保证P、I、D调节得独立进行。 结构二:串联式模拟PID调节电路结构。“串联”即将比例电路、比例积分电路、比例微分电路输入与 输出依次串联起来,三者依次作用。其结构形式决定了其输出只能为P、PL PI D运算后得结果。
三、具体电路设计及工作原理说明 该电路分别曲三个模块构成,分别就是比例电路,积分电路,微分电路。三个模块可以分别单独输出或者两两结合,也可以三个模块同时进行输出。 I、比例运算 当J 3、J6断开,J4闭合。J1向上拨接通,J 2向下拨接通时。电路为比例电路。 2、积分电路 当J4、J6断开,J 3闭合。J I、J 5向上接通,J 2任意状态时,电路为积分电路。3、微分电路 当J4、J3断开,J6接通,J5向上接通时,电路为微分电路。 4、比例积分电路 当J3、J6断开J4接通J1向下接通J 6向上接通时,电路为比例积分电路。 5、比例微分电路 当J 3、J6断开,J4接通,J 1、J2、J 5向上接通时,电路为比例微分电路。 6、比例积分微分电路
当J3、J6断开J 4接通,JI. J 5向下接通J2任意状态时,电路为比例积分微分电路。 四、测试结果 1、比例运算 今Oscilloscope-XSCl Q — ey ? 2、积分运算 3、微分运算
自校正控制系统分析
自校正控制系统分析 摘要:本文介绍了自校正控制系统的基本结构,主要介绍了基于PID 结构的间接自校正控制系统的控制算法,并通过实例仿真结果,表明了自校正PID 控制不仅需要调整的参数少,而且还能够根据对象特性的变化在线修改这些参数,增强了控制器的自适应能力。 关键字:自校正控制系统;PID 控制;自适应能力 1 引言 自校正控制系统主要由参数估计器、控制器设计、控制器和被控对象4部分组成,如图1所示。该系统内环由被控对象和可调控制器组成,外环则由过程模型参数估计器和控制器参数计算器所组成,其任务是辨识过程参数再按选定的设计方法综合出控制器参数,用以修改内环的控制器。这类系统的特点是必须对过程或者被控对象进行在线辨识估计器,然后用对象参数估计值和事先规定的性能指标在线综合出调节器的控制参数,并根据此控制参数产生的控制作用对被控对象进行控制经过多次地辨识和综合调节参数可以使系统的性能指标趋于最优。 图1 自适应控制系统结构图 自适应控制算法对于复杂系统能够达到较好的控制精度跟踪速度以及稳定性,其实时性好,算法简单,易于实现。然而,在PID 控制中,一个至关重要的问题就是PID 参数的整定。典型的PID 参数整定方法是在获取被控对象数学模型的基础上,根据某一整定规则来确定参数。PID 参数整定的优劣,不但会影响到控制质量,而且会影响到控制系统的稳定性和鲁棒性。本文介绍了基于PID 结构的间接自校正控制。 2 基于PID 结构的间接自校正控制 自校正PID 控制算法的设计思想是: 以极点配置控制律为控制器基本形式,引入递推算法估计对象参数,并将估计结果按极点配置法进行控制器参数的设计。下面介绍自校正PID 控制器。 被控对象为 )()()()()(11k e k u z B z k y z A d +=--- (1) 式中,u(k),y(k)表示系统的输入和输出,e(k)为外部扰动,d ≥为纯延迟,且221111)(---++=z a z a z A ,21101)(---+???++=z b z b b z B b n 。 对系统(1)采用PID 控制,此时,对应的PID 控制器可表示为 )()()()()()(1111k y z R k y z R t u z F r ----= (2) ?=--)()(1 11z F z F (3) 过 程过程模型参数估计器 可调控制器 输出控制量输入 过程参数 控制器 参 数 控制器参数 计算器
倒立摆系统的状态空间极点配置控制设计
摘要:为实现多输入、多输出、高度非线不稳定的倒立摆系统平衡稳定控制,将倒立摆系统的非线性模型进行近似线性化处理,获得系统在平衡点附近的线性化模型。利用牛顿—欧拉方法建立直线型一级倒立摆系统的数学模型。在分析的基础上,基于状态反馈控制中极点配置法对直线型倒立摆系统设计控制器。由MATLAB仿真表明采用的控制策略是有效的,设计的控制器对直线型一级倒立摆系统的平衡稳定性效果好,提高了系统的干扰能力。 关键词:倒立摆、极点配置、MATLAB仿真 引言:倒立摆是进行控制理论研究的典型试验平台,由于倒立摆本身所具有的高阶次、不稳定、非线性和强耦合性,许多现代控制理论的研究人员一直将他视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,基于极点配置法给直线型一级倒立摆系统设计控制器 1.数学模型的建立 倒立摆系统其本身是自不稳定的系统,实验建模存在着一定的困难。在忽略掉一些次要的因素之后,倒立摆系统就是一典型的运动的刚体系统,可以在惯性坐标系中应用经典力学理论建立系统动力学方程。下面采用牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型。 1.1微分方程的数学模型 在忽略了空气阻力和各种摩擦力之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图1所示:
图1:直线一级倒立摆模型 设系统的相关参数定义如下: M:小车质量 m:摆杆质量 b:小车摩擦系数 l:摆杆转动轴心到杆质心的长度 I:摆杆质量 F:加在小车上的力 x:小车位置 Φ:摆杆与垂直方向上方向的夹角 θ:摆杆与垂直方向下方向的夹角(摆杆的初始位置为竖直向下) 如下图2所示为小车和摆杆的受力分析图。其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
模拟电路PID调节器要点
实验开放课题结题报告设计课题:PID调节器的设计 专业班级:04电子科学与技术 学生姓名:骆炳福何青丽冯立平 指导教师:曾祥华 设计时间:2006年8月10日
题目:PID调节器的设计 一、设计任务与要求 1.设计一个负反馈放大电路 2.能实现比例运算电路、积分电路和微分电路的功能 二、方案设计与论证 设计一个PID调节器,PID控制器就是根据系统的误差利用比例积分微分计算出控制量,比例积分微分(PID)控制包含比例(P)、积分(I)、微分(D)三部分,实际中也有PI和PD控制器。 上图中给出了一个PID控制的结构图,控制器输出和控制器输入(误差)之间的关系在时域中可用公式表示如下:
公式中表示误差、控制器的输入,是控制器的输出,为比例 系数、积分时间常数、为微分时间常数。式又可表示为: 公式中和分别为和的拉氏变换,, 。、、分别为控制器的比例、积分、微分系数。 三、单元电路设计与参数计算 分析:上面电路中的输入支路和反馈支路中都有电阻、电容元件,因此直接在时域里求出输出与输入的关系比较困难。如果先在S域里求出电路的传递函数(即输出与输入的关系),再利用拉氏反变换得到时域里的输出与输入的关系,这样就比较容易些。 设
由图可知 在对上式进行拉氏反变换,因S表示微分,1/S表示积分。S 一次方表示微分一次,二次方表示微分两次,S负一次方表示积分一次,负两次方表示积分两次。因此式中的第一、第二项表示比例运算,第三项表示微分运算,第四项表示积分运算,所以 上述电路的输出输入关系为比例-积分-微分运算,又称为PID运算。在自动控制系统中经常用作为 PID调节器。 四、总原理图及元器件清单
控制系统的极点配置实验报告
课程名称: 控制理论乙 指导老师: 姚唯 成绩: 实验名称: 控制系统的极点配置 实验类型: 同组学生姓名: 郁明非 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握全状态反馈系统的极点配置方法 2.在Simulink 仿真环境中,研究极点配置对系统特性的影响 二、实验内容和原理 (一)实验内容 1.一被控对象,其传递函数为 ) 3)(2)(1(10 )(+++= s s s s G 设计反馈控制器u=-kx ,使闭环系统的极点为3221j +-=μ,3222j --=μ,103-=μ。 2. 在Simulink 仿真环境下,用基本环节组成经过极点配置后的系统,通过图形观察环节,观察系统的各点响应。 (二)实验原理 对一给定控制系统如果其状态完全可控,则可进行任意极点配置即通过设计反馈増益K 使闭环系统具有期望的极点。极点配置有二种方法:第一种方法是采用变换矩阵T ,使系统具有期望的极点,从而求出矩阵K ;第二种方法基于Caylay-Hamilton 理论,通过矩阵多项式φ(a),可求出K (这种方法称为Ackermann 公式)。在MATLAB 中,利用控制系统工具箱函数place 和acker 进行极点配置设计。 三、主要仪器设备 一台PC 电脑,matlab 仿真软件,simulink 仿真环境 四、实验源代码及实验结果
function jidianpeizhi num=[10]; den=[1,6,11,6]; [A,B,C,D]=tf2ss(num,den); J=[-2-j*2*sqrt(3),-2+j*2*sqrt(3),-10]; K=place(A,B,J); K sys=ss(A-B*K,[0;0;0],eye(3),0); t=0::4; X=initial(sys,[1;0;0],t); x1=[1,0,0]*X'; x2=[0,1,0]*X'; x3=[0,0,1]*X'; subplot(3,1,1); plot(t,x2); grid on; title('Reponse to initial condition'); ylabel('x1'); subplot(3,1,2); plot(t,x2); grid on; ylabel('x2'); subplot(3,1,3); plot(t,x3); grid on; ylabel('x3'); xlabel('t(sec)');
PID调节器的作用及其参数对系统调节质量的影响
实验: PID调节器的作用及其参数对系统调节质量的影响 一.实验目的: 1.了解和观测PID基本控制规律的作用,对系统动态特性和稳态特性及稳 定性的影响。 2.验证调节器各参数(Kc,Ti,Td), 在调节系统中的功能和对调节质量的 影响。 二. 实验内容: 1.分别对系统采取比例(P)、比例微分(PD)、比例积分(PI)、比例积分微分(PID) 控制规律,通过观察系统的响应曲线,分析系统各性能的变化情况。 1.观测定值调节系统(扰动作用时)在各调节规律下的响应曲线。 2.观测调节器参数变化对定值调节系统瞬态响应性能指标的影响。 三. 实验原理: 参考输入量(给定值)作用时,系统连接如图(1)所示: 图(1) 图(2) 四. 实验步骤: 利用MATLAB中的Simulink仿真软件。 l. 参考实验一,建立如图(2)所示的实验原理图;
2. 将鼠标移到原理图中的PID模块进行双击,出现参数设定对话框,将PID 控制器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例控制。 3. 单击工具栏中的 图标,开始仿真,观测系统的响应曲线,分析系统性 能;调整比例增益,观察响应曲线的变化,分析系统性能的变化。 4. 重复步骤2-3,将控制器的功能改为比例微分控制,观测系统的响应曲线, 分析比例微分控制的作用。 5. 重复步骤2-3,将控制器的功能改为比例积分控制,观测系统的响应曲线, 分析比例积分控制的作用。 6. 重复步骤2-3,将控制器的功能改为比例积分微分控制,观测系统的响应曲线,分析比例积分微分控制的作用。 (1) P=1,I=0,D=0 (2) P=0.618,I=0,D=0 (3) P=0.618,I=0.1,D=0 (4) P=0.618,I=1,D=0