9矩阵位移法习题解答-重庆大学文国治版-教材课后答案
第9章 矩阵位移法习题解答
习题9.1 是非判断题
(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。( )
(2)矩阵位移法基本未知量的数目与位移法基本未知量的数目总是相等的。( ) (3)单元刚度矩阵都具有对称性和奇异性。( )
(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。( ) (5)结构刚度矩阵与单元的编号方式有关。( )
(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。( ) 【解】(1)正确。
(2)错误。位移法中某些不独立的杆端位移不计入基本未知量。 (3)错误。不计结点线位移的连续梁单元的单刚不具奇异性。 (4)正确。
(5)错误。结点位移分量统一编码会影响结构刚度矩阵,但单元或结点编码则不会。 (6)错误。二者只产生相同的结点位移。 习题9.2填空题
(1)矩阵位移法分析包含三个基本环节,其一是结构的________,其二是________分析,其三是________分析。
(2)已知某单元○e 的定位向量为[3 5 6 7 8 9]T ,则单元刚度系数35e
k 应叠加到结构刚度
矩阵的元素____中去。
(3)将非结点荷载转换为等效结点荷载,等效的原则是________________。
(4)矩阵位移法中,在求解结点位移之前,主要工作是形成________________矩阵和________________列阵。
(5)用矩阵位移法求得某结构结点2的位移为T 2222[]u v θ=Δ=[0.8 0.3 0.5]T ,单元①的始、末端结点码为3、2,单元定位向量为(1)T [000345]=λ,设单元与x 轴之间的夹角为π
2
α=
,则(1)=δ________________。
(6)用矩阵位移法求得平面刚架某单元在单元坐标系中的杆端力为
T [7.54870.97.548121.09]e =----F ,则该单元的轴力F N =______kN 。
【解】(1)离散化,单元,整体; (2)k 68;
(3)结点位移相等;
(4)结构刚度,综合结点荷载; (5)[0 0 0 0.3 -0.8 0.5]T ; (6)-7.5。
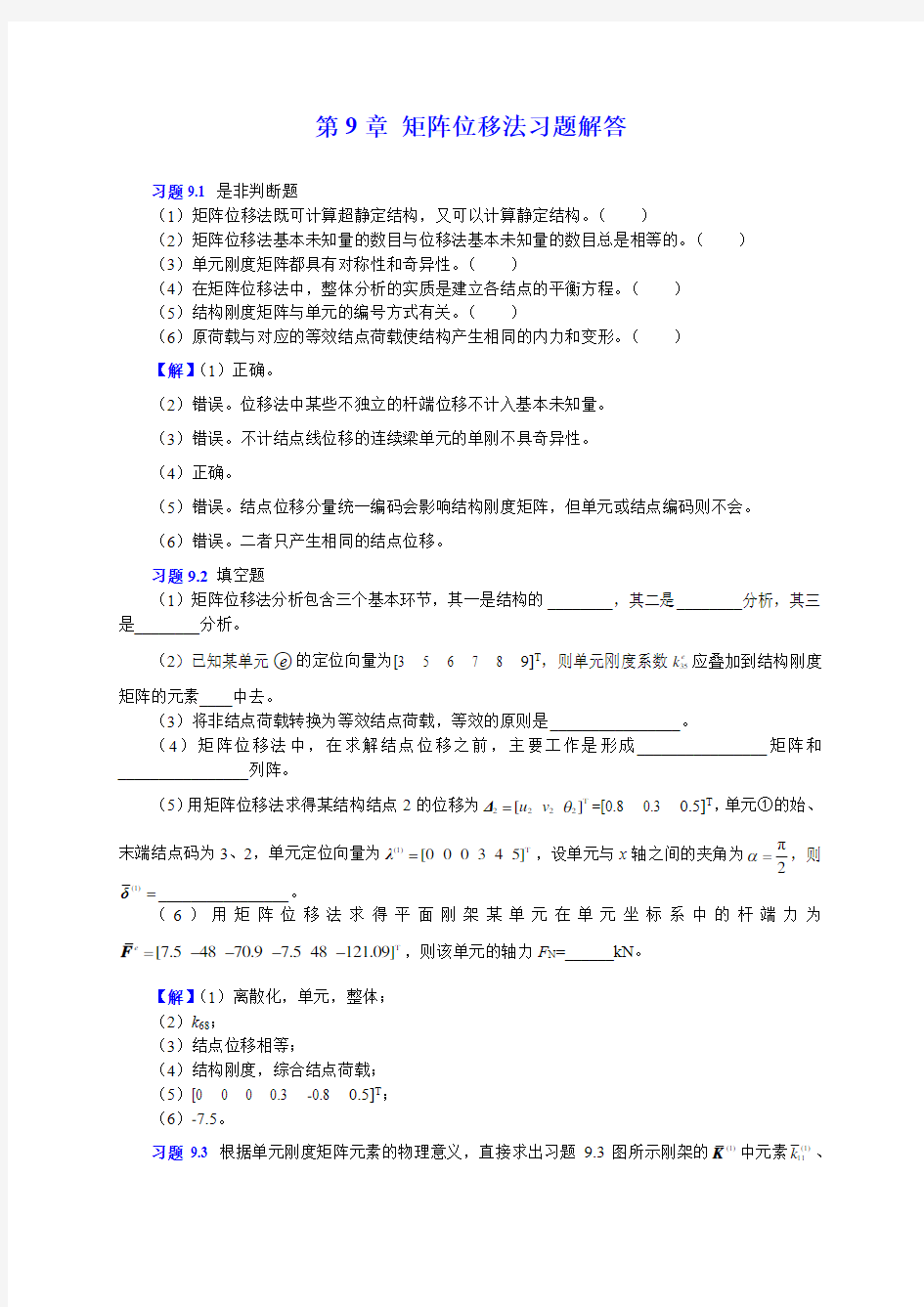
习题9.3 根据单元刚度矩阵元素的物理意义,直接求出习题9.3图所示刚架的(1)K 中元素(1)
11k 、
(1)23k 、(1)
35k 的值以及(1)K 中元素(1)11k 、(1)23k 、(1)35k 的值。
习题9.3图
【解】各刚度系数的物理意义如习题解9.3图所示。因此,各刚度系数的值为
(1)11/k EA l =,(1)2236/k EI l =,(1)
2356/k EI l =-;
(1)31112/k EI l =,(1)230k =,(1)350k =。
习题解9.3图
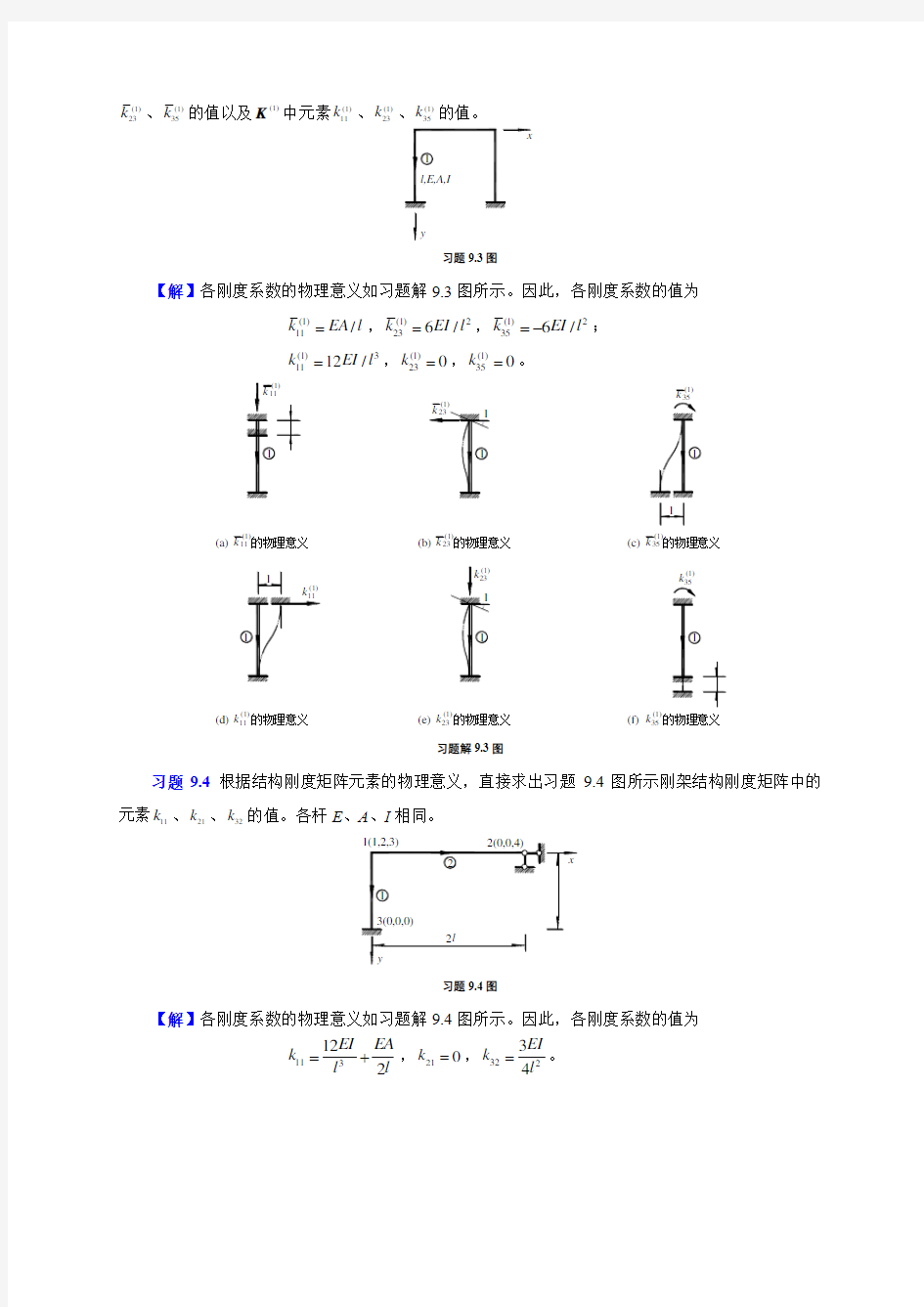
习题9.4根据结构刚度矩阵元素的物理意义,直接求出习题9.4图所示刚架结构刚度矩阵中的元素11k 、21k 、32k 的值。各杆E 、A 、I 相同。
习题9.4图
【解】各刚度系数的物理意义如习题解9.4图所示。因此,各刚度系数的值为
113122EI EA k l l =
+,210k =,322
34EI
k l
=。 y
11k (a)的物理意义
(1)
的物理意义
(1)
(b)23k 的物理意义
(c)35k (1)
k 的物理意义
(1)
(d)11k 的物理意义
(e)23k (1)
(1)
(f)35k 的物理意义
(1)
习题解9.4图
习题9.5用简图表示习题9.5图所示刚架的单元刚度矩阵(1)K 中元素(1)
23k ,(2)K 中元素(2)44k 的物理
意义。
习题9.5图
【解】各刚度系数的物理意义如习题解9.5图所示。
习题解9.5图
习题9.6习题9.6图所示刚架各单元杆长为l ,EA 、EI 为常数。根据单元刚度矩阵元素的物理意义,写出单元刚度矩阵(1)K 、(2)K 的第3列和第5列元素。
习题9.6图
【解】各列刚度系数的物理意义如习题解9.6图所示。因而
(1)
K 中第3列元素:T
22
64620
0EI EI
EI EI l l l
l ?
?
-???
? (1)K 中第5列元素:T
3
2
3
212612600
EI EI
EI EI l l l l ?
?---???
?
和11(a)k 的物理意义
21k 32k (b)的物理意义
的物理意义
(a)23k F Q2
(2)
44(b)k 的物理意义
(2)
K
中第3列元素:T
2
2
64620
EI
EI EI EI l
l l
l ??
-????
(2)
K
中第5列元素:T
0000EA EA l l ?
?
-???
?
习题解9.6图
习题9.7用先处理法,对习题9.7图所示结构进行单元编号、结点编号和结点位移分量编码,并写出各单元的定位向量。
习题9.7图
【解】离散化结果如习题解9.7图所示。因而,各单元定位向量为
[]T (1)100234=λ,[]T
(3)567009=λ []T
(2)234567=λ,[]T
(4)568000=λ。
习题解9.7图
本题可有多种离散化方法,因此上述答案不是唯一的正确答案。 习题9.8用先处理法形成习题9.8图所示结构的综合结点荷载列阵。
(a)第3列元素的物理意义
K
(1)
第5列元素的物理意义
(b)(1)
K
第5列元素的物理意义
第3列元素的物理意义(c)K
(2)
(d)(2)
K
习题9.8图
【解】离散化如习题解9.8图所示。
习题解9.8图
非结点荷载引起的单元固端力为
[]T (2)P 01280128=---F ,[]T
(3)P 09 4.509 4.5=---F
各单元的等效结点荷载列阵为
[]
(2)T
(2)
T
(2)(2)E
P
P
3
45678
01280128→=-=-=-P
T F
F
λ
[]
(3)T
(3)T (3)(3)E P P 67
8
09
09 4.509 4.5→=-=-=-P T F F λ
集成为结构的等效结点荷载列阵
[]T
E 000128021 3.59=-P
直接结点荷载列阵为
[]T
J 050400000=-P
综合结点荷载列阵为
[]T
J E 050168021 3.59=+=--P P P
习题9.9用先处理法求习题9.9图所示连续梁的结构刚度矩阵和结构的综合结点荷载列阵。已知:42=2.410kN m EI ??。
8kN
习题9.9图
【解】离散化如习题解9.9图所示。本题无需坐标转换。
习题解9.9图
先求结构刚度矩阵。各单元的单刚为
(1)1
2
11/211/212EI ??=????K ,(2)2
3
2/31/321/32/33EI ??=????K ,(3)
3
4
4/52/532/54/54
EI ??=????
K 集成即可得到结构刚度矩阵
411/2
00 2.4 1.20.00.05/31/30 4.00.80.01022/152/5 3.520.964/5 1.92EI ??
?????????
?==??
??????
???????
?
对对称称K 再求综合结点荷载列阵。非结点荷载作用单元的等效结点荷载列阵为
[]T
(2)
E
2
3
10.6710.67=-P
,[]
T
(3)E
34
12.512.5=-P
集成为结构的等效结点荷载列阵
[]T
E 010.67 1.8312.5=P
综合结点荷载列阵为
[][]T
J E E 5000510.67 1.8312.5=+=+=P P P P
习题9.10用先处理法求习题9.10图所示结构刚度矩阵。忽略杆件的轴向变形。各杆52=510kN m EI ??。
习题9.10图
【解】离散化如习题解9.10图所示。因为不计各杆轴向变形,所以本题只涉及转角位移未知量,无需坐标转换。
各单元的单刚为
(1)1
2
4/52/512/54/52EI ??=????K ,(2)2
3
4/52/522/54/53EI ??=????K ,(3)2
11/221/210EI ??=????K ,(4)3
11/231/210
EI ??=????
K 集成即可得到结构刚度矩阵
54/52/504202/513/52/51013202/59/59EI ????????==????
????????
202K
习题解9.10图
习题9.11 用先处理法建立习题9.11图所示结构的矩阵位移法方程。已知:各杆5=410kN EA ?,42=510kN m EI ??。
习题9.11图
【解】1)离散化如习题解9.11(a)图所示。
习题解9.11图
2)计算结构刚度矩阵 各单元单刚分别为:单元①
(1)(1)
40
1
2
3
4
13.33
0013.33000
0 2.222 3.3330 2.222 3.33310 3.333 6.6670 3.333 3.33301013.33
0013.330020 2.222 3.3330 2.222 3.33330 3.333 3.3330 3.333 6.6674
-????-????-==??
-????---??
-????
K K 单元②
(a) 离散化
(b) 附加约束上的反力
(2)(2)
4234506
10.00
0010.0000200.9375 1.87500.9375 1.87530 1.875 5.0000 1.875 2.50041010.00
0010.0000500.9375 1.87500.9375 1.87500 1.875 2.5000 1.875 5.0006
-????-????-==??
-????---??
-???
?K K 单元③
(3)
T (3)42
3
4
0.9375
0 1.8750.93750 1.8752
010.000010.00031.8750 5.000 1.8750 2.500
4100.93750 1.8750.93750 1.8750010.000010.00001.8750 2.500 1.8750 5.0000
---????-????-==??
-????-??
-???
?K T K T 集成为总刚
4 2.222
0 2.222 3.33300024.270 1.87510.0002.222013.16 1.4580 1.87510 3.333 1.875 1.45816.670 2.500010.000010.00000 1.875 2.5000 5.000-????--????--=??
--????-??
????
K 2)计算综合结点荷载列阵
除可以按照习题9.8的方法计算外,还可以直接根据其物理意义形成综合结点荷载列阵。具体做法如下:
将原结构上各结点位移未知量利用附加约束限制住后,施以原结构所受荷载。这一过程可理解成在矩阵位移法(先处理法)的基本结构上,作用外荷载,形成如习题解9.11(b)图所示的矩阵位移法基本体系。由此,可得各附加约束上的反力为
[][]T T
P P1P2
P3P4P5
P6801812012F F F F F F ==---F
因此,综合结点荷载列阵为
[]T
P 801812012=-=-P F
3)列出结构刚度方程K ?=P
122
423382.2220
2.222
3.3330002
4.27
0 1.87510.0001813.16 1.4580
1.875101216.670
2.500010.00
0125.000u u ννθθ-??????
??????--????????????-=?
?????????????????
??????-????????
???
?对
称 习题9.12用先处理法计算习题9.12图所示刚架的结构刚度矩阵。已知:5=3.210kN EA ?,42=4.810kN m EI ??。
习题9.12图
【解】离散化如习题解9.12图所示。各单元单刚分别为
习题解9.12图
单元①
(1)(1)
42
3
4
1
6.400
00 6.40000200.4608 1.15200.4608 1.15230 1.152 3.8400 1.152 1.920410 6.400
00 6.40000000.4608 1.15200.4608 1.15210 1.152 1.9200 1.152 3.840
-????-????-==??
-????---??
-????
K K 单元②
(2)
T (2)42
3
4
0.9000
0 1.8000.90000 1.8002
08.000008.000031.8000 4.800 1.8000 2.4004100.9000
0 1.8000.90000 1.800008.000008.000001.8000 2.400 1.8000 4.8000
---????-????
-==??
-????-??-????
K T K T 集成为总刚
40.46080
0.4608 1.1527.3000 1.80010
8.461
1.1528.640--??
??
-??=??
?????
?
对称
K 习题9.13用先处理法计算习题9.13图所示组合结构的刚度矩阵K 。已知:梁杆单元的5=3.210kN EA ?,42=4.810kN m EI ??,链杆单元的5=2.410kN EA ?。
习题9.13图
【解】离散化如习题解9.13图所示。这里利用一般单元来计算链杆单元③,令其EI 为零,则该单元的杆端转角为无意义的杆端位移,可为任意值。单元③的杆端位移编码如习题解9.13图所示,其杆端转角在结点4处为“0”,表示无杆端转角;在结点2处为“3”,表示与单元①和②在该端的转角相同。
点位移分量统一编码应给为“0”,再令该单元EI 为零。
习题解9.13图
各单元单刚分别为 单元①和②
(1)(1)
(2)(2)(1)(2)(1)
40001231
2
3
4
8.000
008.000001
000.900 1.80000.900 1.80020 1.800 4.8000 1.800 2.4003108.000
008.00000000.900 1.80000.900 1.80040 1.800 2.4000 1.800 4.8000
→→↓
-????-????-===??
-????---??
-????
K K K λλλλ00123
单元③
(3)
T (3)40
1
2
33.072
2.3040
3.072 2.304
002.304 1.7280 2.304 1.7280000
0000010 3.072 2.3040 3.072 2.304012.304 1.7280 2.304 1.728020
0000
03
--??
??--????==?
?--????--?
?????K T K T 集成为总刚
419.07
2.30400
3.52800.90010
9.600
1.8000.900??
??-??
=??
-???
?
对称
K
习题9.14若用先处理法计算习题9.14图所示结构,则在结构刚度矩阵K 中零元素的个数至少有多少个?
习题9.14图
【解】离散化如习题解9.14图所示,则各单元定位向量为
习题解9.14图
(1)T [123000]=λ,(2)T [123456]=λ,(3)T [8910457]=λ (4)T [457000]=λ,(5)T [89100011]=λ
根据单元定位向量,判定各结点位移分量间的相关性。这里参考【例10.2】的方法,具体为:位移分量1~3、6均与位移分量7~11无关,得到无关分量20对;位移分量4、5、7与位移分量11无关,得到无关分量3对;合计无关分量共23对。说明K 上半三角中,至少有23个元素为零,因此整个K 中至少应有46个零元素。
习题9.15试用矩阵位移法计算习题9.15图所示连续梁,并画出弯矩图。各杆EI =常数。
习题9.15图
【解】1)离散化如习题解9.15(a)图所示。连续梁无需坐标转换。
习题解9.15图
2)计算总刚 各单元刚度矩阵为
图(kN·m)
M (b)(a) 离散化
(1)0111/201/211EI ??=????K ,(2)1211/211/212EI ??=????K ,(3)
20
11/221/210
EI ??=????
K 集成为总刚
21/21/22EI ??
=????
K 3)计算综合结点荷载列阵
按照习题9.11中综合结点荷载列阵的解法,在2、3两结点上附加刚臂,易求得
[][]T T
P P1
P2810F F ==-F
因此,综合结点荷载列阵为
[]T
P 810=-=-P F
4)解结构刚度方程K ?=P ,得
[]T
1 5.6 6.4EI
=
-? 5)求单元杆端力 根据P e e e e =+F K F δ,得
(1)
(1)(1)(1)(1)(1)(1)(1)P P 11/200810.811/21 5.618 2.4EI EI --????????=+=+=?+=????????-????????
F K F K F λδδ
(2)
(2)(2)(2)(2)P 11/2 5.610 2.411/21 6.420 3.6EI EI --????????=+=?+=????????????????
F K F λδ (3)
(3)(3)(3)(3)P 11/2 6.4210 3.611/21001013.2EI EI --????????=+=?+=????????????????
F K F λδ 6)绘弯矩图,如习题解9.15(b)图所示。
习题9.16用先处理法计算习题9.16图所示刚架的内力,并绘内力图。已知:各杆72=310kN /m E ?,20.16m A =,40.002m I =。
习题9.16图
《结构力学习题集》-矩阵位移法习题及答案(DOC)
第八章 矩阵位移法 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234x y M , θ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 123l l 4l l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) x y M , θ EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l (0,0,1) (0,5,0) (2,3,4) l ① ② 123x y M , θ 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l l 1 3 4 2A , I A A /222A I , 2A x y M , θ 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 3 12① ② ③ [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 : 4 x y M , θ
第九章矩阵位移法习题集
第九章 矩阵位移法 【练习题】 9-1 是非题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 9-2 选择题: 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比: A .完全相同; B .第2、3、5、6行(列)等值异号; C .第2、5行(列)等值异号; D .第3、6行(列)等值异号。
《结构力学习题集》(下)-矩阵位移法习题及答案 (2)
第七章 矩阵位移法 一、是非题 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 ? 8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 二、选择题 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。 — 3、单元i j 在图示两种坐标系中的刚度矩阵相比:
《结构力学习题集》-矩阵位移法习题及答案
第八章 矩阵位移法 – 老八校 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4 l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l 1 3 4 2 A , I A A /222A I , 2A 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 :
《结构力学习题集》下矩阵位移法习题及答案 2
第七章 矩阵位移法 一、就是非题 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性与奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 就是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 就是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它就是整个结构所应满足的变形条件。 8、在直接刚度法的先处理法中,定位向量的物理意义就是变形连续条件与位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数与。 10、矩阵位移法中,等效结点荷载的“等效原则”就是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 二、选择题 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号就是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,就是: A.非对称、奇异矩阵; B.对称、奇异矩阵; C.对称、非奇异矩阵; D.非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比: A.完全相同; B.第2、3、5、6行(列)等值异号;
矩阵位移法练习题
结构力学自测题(第八单元) 矩阵位移法 姓名 学号 一、是 非 题(将 判 断 结 果 填 入 括 弧 :以 O 表 示 正 确 ,以 X 表 示 错 误 ) 1、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 ( ) 2、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有 K ij = K ji ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 () 3、图 示 梁 结 构 刚 度 矩 阵 的 元 素 K EI l 113 24=/ 。 ( ) EI l l EI 212 x y M , θ 附: ????? ?????????? ?????????? ???? ?--- -----l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA 460260612061200000260460 6120612000002 22323222323 4、在 任 意 荷 载 作 用 下 ,刚 架 中 任 一 单 元 由 于 杆 端 位 移 所 引 起 的 杆 端 力 计 算 公 式 为 :{} [][]{}F T K e e e =δ 。 ( ) 二、选 择 题 ( 将 选 中 答 案 的 字 母 填 入 括 弧 内 ) 1、已 知 图 示 刚 架 各杆 EI = 常 数,当 只 考 虑 弯 曲 变 形 ,且 各 杆 单 元 类 型 相 同 时 ,采 用 先 处 理 法 进 行 结 点 位 移 编 号 ,其 正 确 编 号 是 : (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0) (1,2,0) (0,0,0) (0,0,3) (1,0,2) (0,0,0) (0,0,0) (1,0,3) (0,0,0) (0,1,2) (0,0,0) (0,3,4) A. B. C. D. 2 1 3 4 1 2 3 4 1 2 3 4 1 2 3 4 x y M , θ ( ) 2、平 面 杆 件 结 构 一 般 情 况 下 的 单 元 刚 度 矩 阵 []k 66?, 就 其 性 质 而 言 ,是 : ( ) A .非 对 称 、奇 异 矩 阵 ; B .对 称 、奇 异 矩 阵 ; C .对 称 、非 奇 异 矩 阵 ; D .非 对 称 、非 奇 异 矩 阵 。 3、单 元 i j 在 图 示 两 种 坐 标 系 中 的 刚 度 矩 阵 相 比 : A . 完 全 相 同 ; B . 第 2、3、5、6 行 (列 ) 等 值 异 号 ; C . 第 2、5 行 (列 )等 值 异 号 ; D . 第 3、6 行 (列 ) 等 值 异 号 。 ( ) i j y x i j y x M , θ M , θ 4、矩 阵 位 移 法 中 ,结 构 的 原 始 刚 度 方 程 是 表 示 下 列 两 组 量 值 之 间 的 相 互 关 系 : ( ) A .杆 端 力 与 结 点 位 移 ; B .杆 端 力 与 结 点 力 ; C .结 点 力 与 结 点 位 移 ; D .结 点 位 移 与 杆 端 力 。 5、单 元 刚 度 矩 阵 中 元 素 k ij 的 物 理 意 义 是 : A .当 且 仅 当 δi =1 时 引 起 的 与 δj 相 应 的 杆 端 力 ; B .当 且 仅 当 δj =1时 引 起 的 与 δi 相 应 的 杆 端 力 ; C .当 δj =1时 引 起 的 δi 相 应 的 杆 端 力 ; D .当 δi =1时 引 起 的 与 δj 相 应 的 杆 端 力。 () 6、用 矩 阵 位 移 法 解 图 示 连 续 梁 时 ,结 点 3 的 综 合 结 点 荷 载 是 : A .[]-ql ql 2 12 T 132 ; B .[]ql ql 2132 12T -; C .[]--ql ql 2112 12T ; D .[]ql ql 2112 12T 。 ( ) 123 l /2 l l ql 2 q 4 ql l /2 x y M , θ 7、用 矩 阵 位 移 法 解 图 示 结 构 时 ,已 求 得 1 端 由 杆 端 位 移 引 起 的 杆 端 力 为 {}[] T F 461--=,则 结 点 1 处 的 竖 向 反 力 Y 1 等 于 : A .6-; B .-10; C .10 ; D .14 。 ( ) 2m 4m 12 3 M 1 Y 20kN/m 1 x y M , θ 三、填 充 题 ( 将 答 案 写 在 空 格 内) 1、图 示 桁 架 结 构 刚 度 矩 阵 有 个 元 素 ,其 数 值 等 于 。 2m 3m 3m A B C D EA EA EA x y M , θ 2、图 示 刚 架 用 两 种 方 式 进 行 结 点 编 号 ,结 构 刚 度 矩 阵 最 大 带 宽 较 小 的 是 图 。 3 5 641 2 7 1 2345 6 7 (a) (b) 3、图 示 梁 结 构 刚 度 矩 阵 的 主 元 素 K K 1122== , 。 l l 2EI EI 1 2 x y M , θ 四、图 a 、b 所 示 两 结 构 ,各 杆 EI 、l 相 同 ,不 计 轴 向 变 形 , 已 求 得 图 b 所 示 结 构 的 结 点 位 移 列 阵 为 {}?=-???? ? ?ql EI ql REI ql EI 34396192192 T 。试 求 图 a 所 示 结 构 中 单 元 ① 的 杆 端 力 列 阵。 q 1 2 3 4(a) ql 2 ② ③ ① 1 2 34 (b) ② ③ ① x y M , θ 五、图 a 所 示 结 构 (整 体 坐 标 见 图 b ),图 中 圆 括 号 内 数 码 为 结 点 定 位 向 量 (力 和 位 移 均 按 水 平 、竖 直 、转 动
结构力学-第9章 矩阵位移法课堂练习
结构力学练习题——矩阵位移法 一、是 非 题(将 判 断 结 果 填 入 括 弧 :以 O 表 示 正 确 ,以 X 表 示 错 误 ) 1、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。)(对 2、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有 K ij = K ji ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 ()错 3、图 示 梁 结 构 刚 度 矩 阵 的 元 素 K EI l 113 24=/ 。 ( )错 l l 附: ????? ? ????????? ?????????? ???? ?--------l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA 4602606120612000002604606120612000002 22323222323 二、选 择 题 ( 将 选 中 答 案 的 字 母 填 入 括 弧 内 ) 1、已 知 图 示 刚 架 各杆 EI = 常 数,当 只 考 虑 弯 曲 变 形 ,且 各 杆 单 元 类 型 相 同 时 ,采 用 先 处 理 法 进 行 结 点 位 移 编 号 ,其 正 确 编 号 是 :A (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0) (1,2,0) (0,0,0) (0,0,3) (1,0,2) (0,0,0) (0,0,0) (1,0,3) (0,0,0) (0,1,2) (0,0,0) (0,3,4) A. B. C. D. 2 1 3 4 1 2 3 4 1 2 3 4 1 2 3 4 ( ) 2、平 面 杆 件 结 构 一 般 情 况 下 的 单 元 刚 度 矩 阵 []k 66 ?,就 其 性 质 而 言 ,是 : ( )B A .非 对 称 、奇 异 矩 阵 ; B .对 称 、奇 异 矩 阵 ; C .对 称 、非 奇 异 矩 阵 ; D .非 对 称 、非 奇 异 矩 阵 。 3、单 元 i j 在 图 示 两 种 坐 标 系 中 的 刚 度 矩 阵 相 比 :B A . 完 全 相 同 ;
《结构力学习题集》(下)-矩阵位移法习题及答案
第八章 矩阵位移法 1、(O) 2、(X) 3、(O) 4、(X) 5、(X) 6、(O) 7、(O) 8、(X) 9、(O) 10、(O) 11、(A) 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234x y M , θ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 123l l 4l l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) x y M , θ EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l (0,0,1) (0,5,0) (2,3,4) l ① ② 123x y M , θ 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l l 1 3 4 2A , I A A /222A I , 2A x y M , θ 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 3 12① ② ③ [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 : 4x y M , θ
《结构力学习题集》(下)矩阵位移法习题及答案
第八章矩阵位移法 1、(O) 2、(X) 3、(O) 4、(X) 5、(X) 6、(O) 7、(O) 8、(X) 9、(O) 10、(O) 11、(A) 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{} ?=,它是整个结构所应满足的变 K P 形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234x y M , θ( ) 二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4l l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) x y M , θ EI
第9章 矩阵位移法 例题
第9章 矩阵位移法 习 题 9-1:请给图示结构编号(同时用先处理法和后处理法)及建立坐标。 题9-1图 9-2:求图示连续梁的整体刚度矩阵。 题9-2图 9-3:求图示刚架的整体刚度矩阵。 (c ) (e )
题9-3图 9-4:求图示组合结构的整体刚度矩阵。 题9-4图 9-5:求图示桁架结构的整体刚度矩阵,所有杆件的EA 均相同。 题9-5图 9-6:求图示排架结构的整体刚度矩阵。 题9-6图 9-7:求图示结构的等效结点荷载,请利用结构的对称性。 1kN/m
题9-7图 9-8:求图示结构的等效结点荷载,请利用结构的对称性。 题9-8图 9-9:求图示结构的等效结点荷载。 题9-9图 9-10:求出图示结构的荷载列阵。 题9-10图 9-11:求出图示结构的荷载列阵,请分别用先处理法和后处理法进行编号。 q q
题9-11图 9-12:求图示结构的荷载列阵,考虑轴向变形。 题9-12图 9-13:求图示结构的荷载列阵。 题9-13图 9-14:图示连续梁中间支座发生了下向的移动a ,请求出其整体刚度方程。 题9-14图 10kN/m q
9-15:请求出图示连续梁的整体刚度方程。 题9-15图 9-16:求图示连续梁的整体刚度矩阵。 题9-16图 9-17:图示结构温度发生了变化,请求出整体刚度方程。杆件的EI 、EA 相同。 题9-17图 9-18:图示结构温度发生了变化,请求出整体刚度方程。 题9-18图 9-19:图示结构发生了支座移动,请画出结构的内力图。 00
9矩阵位移法习题解答,重庆大学,文国治版教材课后答案
第9章 矩阵位移法习题解答 习题9.1 是非判断题 (1)矩阵位移法既可计算超静定结构,又可以计算静定结构。( ) (2)矩阵位移法基本未知量的数目与位移法基本未知量的数目总是相等的。( ) (3)单元刚度矩阵都具有对称性和奇异性。( ) (4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。( ) (5)结构刚度矩阵与单元的编号方式有关。( ) (6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。( ) 【解】(1)正确。 (2)错误。位移法中某些不独立的杆端位移不计入基本未知量。 (3)错误。不计结点线位移的连续梁单元的单刚不具奇异性。 (4)正确。 (5)错误。结点位移分量统一编码会影响结构刚度矩阵,但单元或结点编码则不会。 (6)错误。二者只产生相同的结点位移。 习题9.2 填空题 (1)矩阵位移法分析包含三个基本环节,其一是结构的________,其二是________分析,其三是________分析。 (2)已知某单元○e 的定位向量为[3 5 6 7 8 9]T ,则单元刚度系数35e k 应叠加到结构刚度 矩阵的元素____中去。 (3)将非结点荷载转换为等效结点荷载,等效的原则是________________。 (4)矩阵位移法中,在求解结点位移之前,主要工作是形成________________矩阵和________________列阵。 (5)用矩阵位移法求得某结构结点2的位移为T 2222[]u v θ=Δ=[0.8 0.3 0.5]T ,单元①的始、末端结点码为3、2,单元定位向量为(1)T [000345]=λ,设单元与x 轴之间的夹角为π 2 α= ,则(1)=δ________________。 (6)用矩阵位移法求得平面刚架某单元在单元坐标系中的杆端力为 T [7.54870.97.548121.09]e =----F ,则该单元的轴力F N =______kN 。 【解】(1)离散化,单元,整体; (2)k 68; (3)结点位移相等; (4)结构刚度,综合结点荷载; (5)[0 0 0 0.3 -0.8 0.5]T ; (6)-7.5。 习题9.3 根据单元刚度矩阵元素的物理意义,直接求出习题9.3图所示刚架的(1)K 中元素(1) 11k 、
结构力学习题集矩阵位移法习题及答案老八校
第八章 矩阵位移法 – 老八校 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。 ,cos α=C ,sin α=S ,C C A ?= S S D S C B ?=?=,,各杆EA 相同。
9矩阵位移法习题.docx
第9章矩阵位移法习题解答 习题9?1是非判断题 (1)矩阵位移法既可计算超静定结构,又可以计算静定结构。(T ) (2)矩阵位移法棊木未知量的数冃与位移法棊木未知量的数冃总是相等的。(|T*) F (3)单元刚度矩阵都具有对称性和奇界性。(F ) (4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。(T ) (5)结构刚度短阵与单元的编号方式冇关。(F ) (6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。(F ) 【解】(1)正确。 (2)错误。位移法中某些不独立的杆端位移不计入基本未知量。 (3)错谋。不计结点线位移的连续梁单元的单刚不具奇异性。 (4)正确。 (5)错误。结点位移分量统-?编码会影响结构刚度矩阵,但单元或结点编码则不会。 (6)错误。二者只产生相同的结点位移。 习题9.2填空题 (1) ______________________________________________________________ 矩阵位移法分析包含三个基本环节,其一是结构的___________________________________ ,其二是_________ 分析,-其三 是______ 分析。 (2)已知某单元?的定位向量为[3 5 6 7 8 9]丁,则单元刚度系数紜应叠加到结构刚度矩阵的元素—中去。 (3) ________________________________________________________________________ 将非结点荷载转换为等效结点荷载,等效的原则是____________________________________ o (4)矩阵位移法屮,在求解结点位移之前,主要工作是形成_____________________ 矩阵和_______________ 列阵。 (5)用矩阵位移法求得某结构结点2的位移为J2=[w2V2 ft]T=[O.S 0.3 0.5]丁,单元①的始、末端结 点码为3、2,单元定位向量为= [0 0 0 3 4 5]T,设单元与兀轴之间的夹角为? = |,则(6 )用短阵位移法求得平面刚架某单元在单元坐标系中的杆端力为 戸=[7.5 -48 -70.9 -7.5 48 -121.09]7,则该单元的轴力F* _______________________ k N。 【解】(1)离散化,单元,整体; (2)烁 (3)结点位移相等;
矩阵位移法习题
矩阵位移法 一、选择题:(将选中答案的字母填入括弧内) 1、图示连续梁结构,在用结构矩阵分析时将杆AB 划成AD 和DB 两单元进行计算是:( ) A .最好的方法; B .较好的方法; C .可行的方法; D .不可行的方法。 2、图示结点所受外载,若结点位移列阵是按转角顺时针、水平位移(→)、垂直位移(↑)顺序排列,则2结点荷载列阵()2P 应写成:( ) A .[]6105T ; B .[]---6105T ; C .[]6510-T ; D .[] 6105-T 。 3、图示结构,用矩阵位移法计算时(计轴向变形),未知量数目为:( ) A .7; B .8; C .9; D .4。 4、图示结构,用矩阵位移法计算时(计轴向变形),未知量数目为:( ) A .9; B .5; C .10; D .6。 5、在直接刚度法的先处理法中,定位向量的物理意义为:( ) A .变形连续条件; B .变形连续条件和位移边界条件; C .位移边界条件; D .平衡条件。 6、设有一单跨两层支座为固定的对称刚架,承受反对称荷载作用,若考虑杆件的轴向变形与弯曲变形,取半刚架计算时,其先处理法所得结构刚度矩阵的阶数为:( ) A .8×8; B .9×9;
C .10×10; D .12×12。 7、单元ij 在图示两种坐标系中的刚度矩阵相比:( ) A .完全相同; B .第2、3、5、6行(列)等值异号; C .第2、5行(列)等值异号; D .第3、6行(列)等值异号。 j y x i 二、填充题:(将答案写在空格内) 1、根据 互等定理可以证明结构刚度矩阵是 矩阵。 2、图示结构中,已求得结点2的位移列阵{} [][]T T 2222 u a b c ?θ==v ,则单元②的杆端2在局 部坐标下的位移列阵:{}[] T T 2222 u ?θ??==?? ② ②v 。 3、图示桁架结构刚度矩阵有 个元素,其数值等于 。 3m 3m A B C D EA EA EA 4、结构刚度方程中的荷载列阵是由 和 叠加而得。 5、用先处理法中,若只考虑弯曲变形则图示刚架的结构刚度矩阵[]K 中第1行元素为: 。 三、计算题: y
结构力学习题集矩阵位移法习题及答案老八校
1文档收集于互联网,已整理,word 版本可编辑. 第八章 矩阵位移法 – 老八校 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224 ,。 16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。,cos α=C ,sin α=S ,C C A ?= S S D S C B ?=?=,,各杆EA 相同。
《结构力学习题集》(下)-矩阵位移法习题及答案 (2)
第七章 矩阵位移法 一、是非题 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 二、选择题 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比: A .完全相同; B .第2、3、5、6行(列)等值异号; C .第2、5行(列)等值异号; D .第3、6行(列)等值异号。 4、矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。 5、单 元 刚 度 矩 阵 中 元 素 k ij 的 物 理 意 义 是 : A .当 且 仅 当 δi =1 时 引 起 的 与 δj 相 应 的 杆 端 力 ; B .当 且 仅 当 δj =1时 引 起 的 与 δi 相 应 的 杆 端 力 ; C .当 δj =1时 引 起 的 δi 相 应 的 杆 端 力 ; D .当 δi =1时 引 起 的 与 δj 相 应 的 杆 端 力。 三、填充题 1、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
《结构力学习题集》(下)-矩阵位移法习题及答案 (2)
文档来源为:从网络收集整理.word 版本可编辑.欢迎下载支持. 第七章 矩阵位移法 一、是非题 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 二、选择题 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比: A .完全相同; B .第2、3、5、6行(列)等值异号; C .第2、5行(列)等值异号; D .第3、6行(列)等值异号。 4、矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。 5、单 元 刚 度 矩 阵 中 元 素 k ij 的 物 理 意 义 是 : A .当 且 仅 当 δi =1 时 引 起 的 与 δj 相 应 的 杆 端 力 ; B .当 且 仅 当 δj =1时 引 起 的 与 δi 相 应 的 杆 端 力 ; C .当 δj =1时 引 起 的 δi 相 应 的 杆 端 力 ; D .当 δi =1时 引 起 的 与 δj 相 应 的 杆 端 力。 三、填充题 1、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
矩阵位移法
第九章 矩阵位移法 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4 l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l ,0) 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l 1 3 4 2A , I A A /222A I , 2A 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。 [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 :