SIFT算法实现原理步骤
SIFT 算法实现步骤 :1 关键点检测、2 关键点描述、3 关键点匹配、4 消除错配点
参考链接:
https://www.360docs.net/doc/c35693640.html,/zddblog/article/details/7521424
https://www.360docs.net/doc/c35693640.html,/v-July-v/archive/2011/03/13/1983663.html
1关键点检测
1.1 建立尺度空间
根据文献《Scale-space theory: A basic tool for analysing structures at different scales 》我们可知,高斯核是唯一可以产生多尺度空间的核,一个图像的尺度空间,L (x,y,σ) ,定义为原始图像I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。
高斯函数
高斯金字塔
高斯金字塔的构建过程可分为两步:
(1)对图像做高斯平滑;
(2)对图像做降采样。
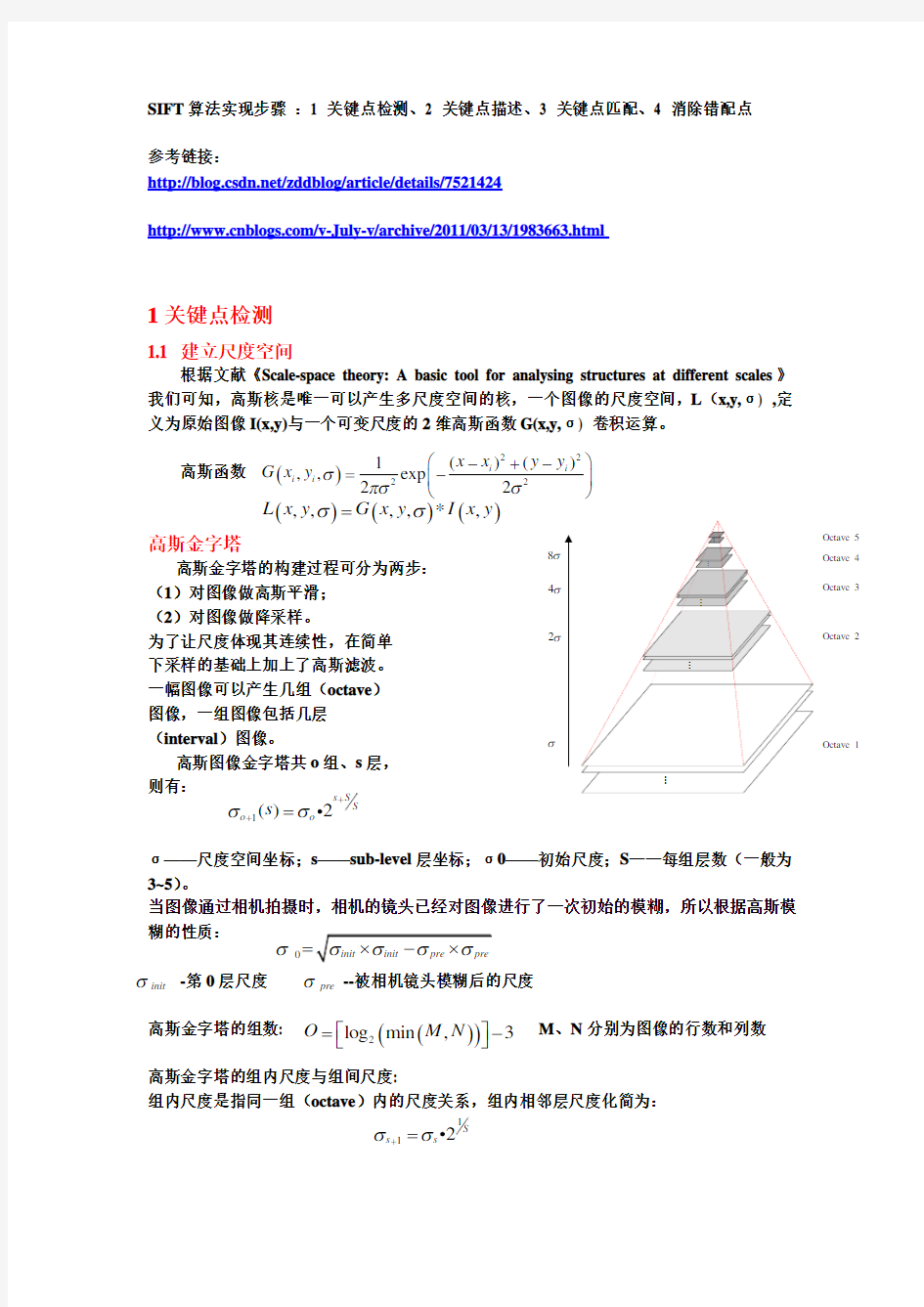
为了让尺度体现其连续性,在简单 下采样的基础上加上了高斯滤波。 一幅图像可以产生几组(octave ) 图像,一组图像包括几层 (interval )图像。 高斯图像金字塔共o 组、s 层, 则有:
σ——尺度空间坐标;s ——sub-level 层坐标;σ0——初始尺度;S ——每组层数(一般为3~5)。
当图像通过相机拍摄时,相机的镜头已经对图像进行了一次初始的模糊,所以根据高斯模糊的性质:
-第0层尺度 --被相机镜头模糊后的尺度
高斯金字塔的组数: M 、N 分别为图像的行数和列数
高斯金字塔的组内尺度与组间尺度:
组内尺度是指同一组(octave )内的尺度关系,组内相邻层尺度化简为:
()22221
()(),,exp 22i i i i x x y y G x y σπσσ??-+-=- ???()()(),,,,*,L x y G x y I x y σσ=Octave 1
Octave 2
Octave 3
Octave 4Octave 5σ
2σ
4σ8
σ
…
…
…
…
…
0init init pre pre
σσσσσ=?-?init σpre σ()()
2log min ,3O M N ??=-??
1
12S s s σσ+=1()2s S
S
o o
s σσ++=
组间尺度是指不同组直接的尺度关系,相邻组的尺度可化为:
最后可将组内和组间尺度归为:
i —金字塔组数 n —每组层数
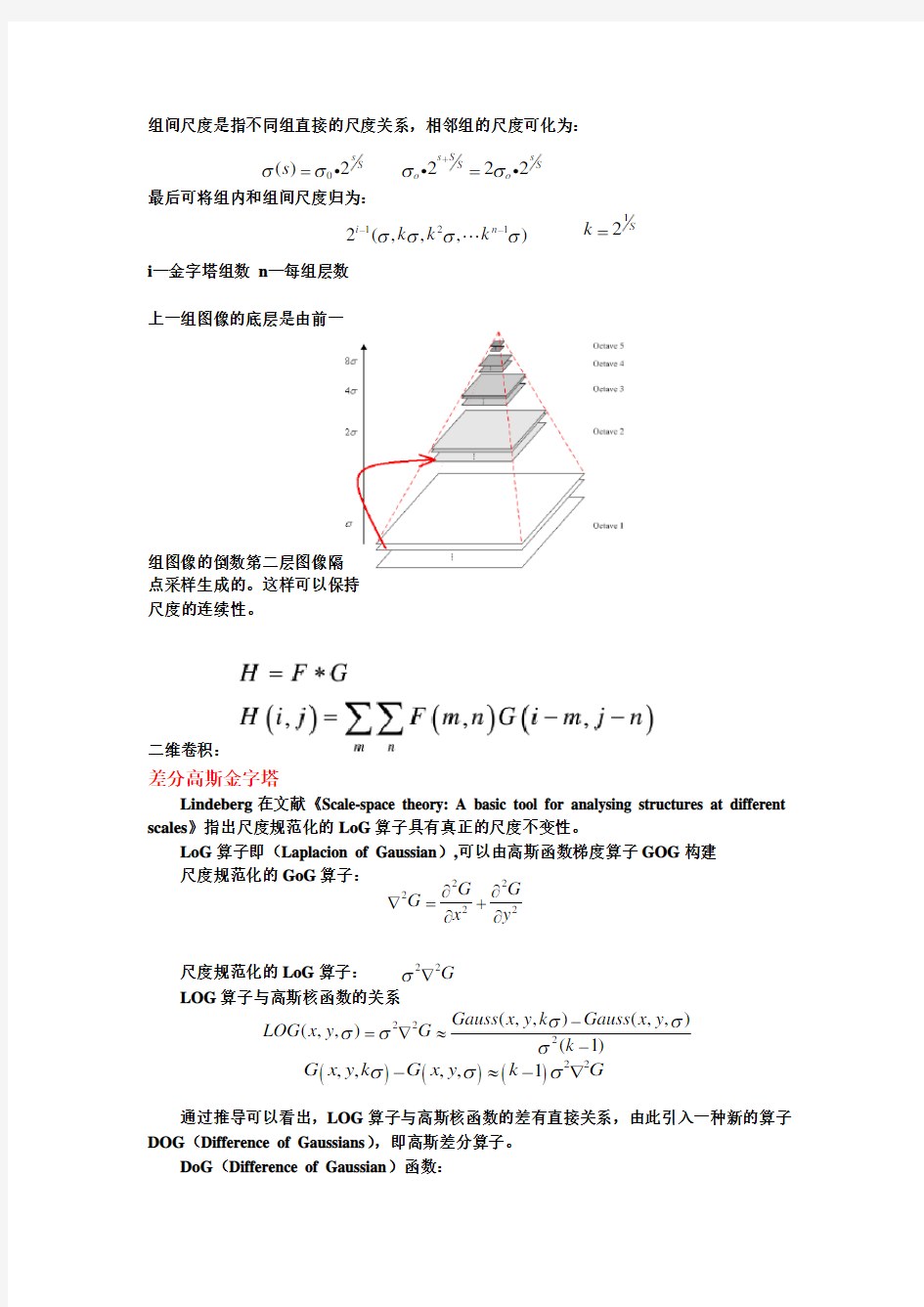
上一组图像的底层是由前一
组图像的倒数第二层图像隔
点采样生成的。这样可以保持 尺度的连续性。
二维卷积:
差分高斯金字塔
Lindeberg 在文献《Scale-space theory: A basic tool for analysing structures at different scales 》指出尺度规范化的LoG 算子具有真正的尺度不变性。
LoG 算子即(Laplacion of Gaussian ),可以由高斯函数梯度算子GOG 构建 尺度规范化的GoG 算子:
尺度规范化的LoG 算子: LOG 算子与高斯核函数的关系
通过推导可以看出,LOG 算子与高斯核函数的差有直接关系,由此引入一种新的算子DOG (Difference of Gaussians ),即高斯差分算子。
DoG (Difference of Gaussian )函数:
0()2s S s σσ=222s S s
S
S o o σσ+=1212(,,,)
i n k k k σσσσ--12S k =22
2
22
G G G x y ???=+??22G σ?222(,,)(,,)(,,)(1)Gauss x y k Gauss x y LOG x y G k σσσσσ-=?≈
-()()()22,,,,1G x y k G x y k G σσσ-≈-?
DoG 在计算上只需相邻尺度高斯平滑后图像相减,因此简化了计算。
对应DOG 算子,我们要构建DOG 金字塔
我们可以通过高斯差分图像看出图像上的像素值变化情况。(如果没有变化,也就没有特征。特征必须是变化尽可能多的点。)DOG 图像描绘的是目标的轮廓。
在Lowe 的论文中,将第0层的初始尺度定为1.6,图片的初始尺度定为0.5,则图像金字塔第0层的实际尺度为
1.2 DoG 的局部极值点检测
关键点是由DOG 空间的局部极值点组成的。为了寻找DoG 函数的极值点,每一个像
素点要和它所有的相邻点比较,看其是否比它的图像域和尺度域的相邻点大或者小。
中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。
在极值比较的过程中,每一组图像的首末两层是无法进行极值比较的,为了满足尺度变化的连续性,我们在每一组图像的顶层继续用高斯模糊生成了3幅图像,高斯金字塔有每组S+3层图像。DOG 金字塔每组有S+2层图像。
()()()
,,,,*,L x y G x y I x y σσ=()()()()
()()
,,,,,,*,,,,,D x y G x y k G x y I x y L x y k L x y σσσσσ=-????=-1.6 1.60.50.5 1.52?-?=
1.3 关键点精确定位
由于DoG 值对噪声和边缘较敏感,因此,在上面DoG 尺度空间中检测到局部极值点还要经过进一步的检验才能精确定位为特征点。
去除低对比度的极值点
为了提高关键点的稳定性,需要对尺度空间DoG 函数进行曲线拟合。利用DoG 函数在尺度空间的Taylor 展开式:
其极值点: 在计算过程中,分别对图像的行、列及尺度三个量进行了修正,其修正结果如下:
求解得 为修正值。 将修正后的结果代入式
上式去除那些对比度较低的不稳定极值点。Lowe 的试验显示,所有取值小于0.04的极值点均可抛弃(像素灰度值范围[0,1])。
去除边缘响应
仅仅去除低对比度的极值点对于极值点的对于特征点稳定性是远远不够的。DoG 函数在图像边缘有较强的边缘响应,因此我们还需要排除边缘响应
DoG 函数的(欠佳的)峰值点在横跨边缘的方向有较大的主曲率,而在垂直边缘的方向有较小的主曲率。主曲率可以通过计算在该点位置尺度的2×2的Hessian 矩阵得到,导数由采样点相邻差来估计:
表示DOG 金字塔中某一尺度的图像x 方向求导两次。 D 的主曲率和H 的特征值成正比,为了避免直接的计算这些特征值,而只是考虑它们
的之间的比率。令 为最大特征值, 为最小的特征值,则
()22
12T T D D D X D X X X X X ??=++??()?,,T X x y σ=()2212T T D D
D X D X X X X X
??=++??21
2()T D D X X X ∧-??=-??X ∧()2212T
T D D
D X D X X X X X
??=++??12T D D X D X X ∧???
=+ ????
xx xy xy yy D D H D D ??=????
xx D α
βr αβ=()xx yy Tr H D D =+()xx yy xy xy
Det H D D D D =?-?()()()()222
1Tr H r Det H r αβαβ++==
在两特征值相等时达最小,随r 的增长而增长。Lowe 论文中建议r 取10。
时将关键点保留,反之剔除。
2 关键点描述
2.1 关键点方向分配
通过尺度不变性求极值点,可以使其具有缩放不变的性质,利用关键点邻域像素的梯度方向分布特性,我们可以为每个关键点指定方向参数方向,从而使描述子对图像旋转具有不变性。 通过求每个极值点的梯度来为极值点赋予方向。 像素点的梯度表示
梯度幅值:
梯度方向:
方向直方图的生成
确定关键点的方向采用梯度直方图统计法,统计以关键点为原点,一定区域内的图像像素点对关键点方向生成所作的贡献。 直方图以每10度方向为一个柱,共36个柱,柱所代表的方向为像素点梯度方向,柱的长短代表了梯度幅值。 根据Lowe 的建议,直方图统计半径采用3*1.5*σ 在直方图统计时,每相邻三个像素点采用高斯加权,根据Lowe 的建议,模板采用[0.25,0.5,0.25],并连续加权两次。
关键点的主方向与辅方向
关键点主方向:极值点周围区域梯度直方图的主峰值,也是特征点方向
关键点辅方向:在梯度方向直方图中,当存在另一个相当于主峰值80%能量的峰值时,则将这个方向认为是该关键点的辅方向。 这可以增强匹配的鲁棒性,Lowe 的论文指出大概有15%关键点具有多方向,但这些点对匹配的稳定性至为关键。
()
2
1r r +()()()2
2
1Tr H r Det H r
+<(),,I I gradI x y x y ??
??= ?????
()()()()()()()22
,1,1,,1,1m x y L x y L x y L x y L x y =+--++--()()()()()1,1,1,tan 1,1,L x y L x y x y L x y L x y θ-??+--=?
?+--??
方向分配实现步骤
1. 确定计算关键点直方图的高斯函数权重函数参数 ;
2. 生成含有36柱的方向直方图,梯度直方图范围0~360度,其中每10度一个柱。由
半径为图像区域生成;
3. 对方向直方图进行两次平滑;
4. 求取关键点方向(可能是多个方向);
5. 对方向直方图的Taylor 展开式进行二次曲线拟合,精确关键点方向; 图像的关键点已检测完毕,每个关键点有三个信息:位置、尺度、方向;同时也就使关键点具备平移、缩放、和旋转不变性。
2.2 生成特征描述符
描述的目的是在关键点计算后,用一组向量将这个关键点描述出来,这个描述子不但包括关键点,也包括关键点周围对其有贡献的像素点。用来作为目标匹配的依据,也可使关键点具有更多的不变特性,如光照变化、3D 视点变化等。 通过对关键点周围图像区域分块,计算块内梯度直方图,生成具有独特性的向量,这个向量是该区域图像信息的一种抽象,具有唯一性。 下图是一个SIFT 描述子事例。其中描述子由2×2×8维向量表征,也即是2×2个8方向的方向直方图组成。左图的种子点由8×8单元组成。每一个小格都代表了特征点邻域所在的尺度空间的一个像素,箭头方向代表了像素梯度方向,箭头长度代表该像素的幅值。然后在4×4的窗口内计算8个方向的梯度方向直方图。绘制每个梯度方向的累加可形成一个种子点,如右图所示:一个特征点由4个种子点的信息所组成。
关键点周围区域图像梯度关键点描述子
x
y
x y
3oct σ3oct σ3oct
σ3oct
σ
Lowe 实验结果表明:描述子采用4×4×8=128维向量表征,综合效果最优(不变性与独特性)。
128维关键点描述子(就是特征描述符)生成步骤
1. 确定计算描述子所需的图像区域 描述子梯度方向直方图由关键点所在尺度的模糊图像计算产生。图像区域的半径通过下式计算:
是关键点所在组(octave )的组内尺度, 2. 将坐标移至关键点主方向
那么旋转角度后新坐标为:
3.在图像半径区域内对每个像素点求其梯度幅值和方向,然后对每个梯 度幅值乘以高斯权重参数,生成方向直方图。
()32112oct
d radius σ??++=oct σ4d =
x y
x y
?cos sin ?sin cos x
x y y θθθθ-???
???=? ? ? ?
??????dc 1-dc dr 1-dr ()()
()()()22,exp 1112k k
r c o w
x y weight grad I x y d d d σσ
??+=?-?-?-?- ??
?
该点与关键点的列距离 该点与关键点的行距离 等于描述子窗口宽度 ×直方图列数(取4)的一半 4.在窗口宽度为2X2的区域内计算8个方向的梯度方向直方图,绘制每个梯度方向的累加值,即可形成一个种子点。然后再在下一个2X2的区域内进行直方图统计,形成下一个种子点,共生成16个种子点。 5.描述子向量元素门限化及门限化后的描述子向量规范化。
描述子向量元素门限化:方向直方图每个方向上梯度幅值限制在一定门限值以下(门限一般取0.2)。
描述子向量元素规范化: 为得到的128描述子向量 为规范化后的向量
关键点描述子向量的规范化正是可去除满足此模型的光照影响。对于图像灰度值整体漂移 ,图像各点的梯度是邻域像素相减得到,所以也能去除。
3 关键点匹配
分别对模板图(参考图,reference image )和实时图(观测图,observation image )建立关键点描述子集合。目标的识别是通过两点集内关键点描述子的比对来完成。具有128维的关键点描述子的相似性度量采用欧式距离。
模板图中关键点描述子:
实时图中关键点描述子: 任意两描述子相似性度量:
要得到配对的关键点描述子, 需满足: 关键点的匹配可以采用穷举法来完成,但是这样耗费的时间太多,一般都采用一种叫kd 树的数据结构来完成搜索。搜索的内容是以目标图像的关键点为基准,搜索与目标图像的特征点最邻近的原图像特征点和次邻近的原图像特征点。 Kd 树是一个平衡二叉树
k x k y w σ3σ()12128,,,W w w w =()12128,,
,L l l l =1281
/j j i i l w w ==∑
1,2,128j =()12128,,,i i i i R r r r =()
12128,,,i i i i S s s s =()(
)
1282
1
,i i ij ij j d R S r s ==-∑()
,i j d R S i j
i p
R S Threshold R S <实时图中距离 最近的点 实时图中距离 的次最近点
关键点匹配并不能标志着算法的结束,因为在匹配的过程中存在着大量的错配点。
图中交叉的绿线为错配点
4 消除错配点
RANSAC(Random Sample Consensus,随机抽样一致)是一种鲁棒性的参数估计方法。
RANSAC实质上就是一个反复测试、不断迭代的过程。
RANSAC的基本思想:
首先根据具体问题设计出某个目标函数,然后通过反复提取最小点集估计该函数中参数的初始值,利用这些初始值把所有的数据分为“内点”(inlier )和“外点“(outlier),最后用所有的内点重新计算和估计函数的参数。
RANSAC事例
如何估计最佳直线?
拟合直线:y=kx+b
重复进行,拟合最优直线
SIFT算法原理
3.1.1尺度空间极值检测 尺度空间理论最早出现于计算机视觉领域,当时其目的是模拟图像数据的多尺度特征。随后Koendetink 利用扩散方程来描述尺度空间滤波过程,并由此证明高斯核是实现尺度变换的唯一变换核。Lindeberg ,Babaud 等人通过不同的推导进一步证明高斯核是唯一的线性核。因此,尺度空间理论的主要思想是利用高斯核对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行尺度空间特征提取。二维高斯函数定义如下: 222()/221 (,,)2x y G x y e σσπσ-+= (5) 一幅二维图像,在不同尺度下的尺度空间表示可由图像与高斯核卷积得到: (,,(,,)*(,)L x y G x y I x y σσ)= (6) 其中(x,y )为图像点的像素坐标,I(x,y )为图像数据, L 代表了图像的尺度空间。σ称为尺度空间因子,它也是高斯正态分布的方差,其反映了图像被平滑的程度,其值越小表征图像被平滑程度越小,相应尺度越小。大尺度对应于图像的概貌特征,小尺度对应于图像的细节特征。因此,选择合适的尺度因子平滑是建立尺度空间的关键。 在这一步里面,主要是建立高斯金字塔和DOG(Difference of Gaussian)金字塔,然后在DOG 金字塔里面进行极值检测,以初步确定特征点的位置和所在尺度。 (1)建立高斯金字塔 为了得到在不同尺度空间下的稳定特征点,将图像(,)I x y 与不同尺度因子下的高斯核(,,)G x y σ进行卷积操作,构成高斯金字塔。 高斯金字塔有o 阶,一般选择4阶,每一阶有s 层尺度图像,s 一般选择5层。在高斯金字塔的构成中要注意,第1阶的第l 层是放大2倍的原始图像,其目的是为了得到更多的特征点;在同一阶中相邻两层的尺度因子比例系数是k ,则第1阶第2层的尺度因子是k σ,然后其它层以此类推则可;第2阶的第l 层由第一阶的中间层尺度图像进行子抽样获得,其尺度因子是2k σ,然后第2阶的第2层的尺度因子是第1层的k 倍即3 k σ。第3阶的第1层由第2阶的中间层尺度图像进行子抽样获得。其它阶的构成以此类推。 (2)建立DOG 金字塔 DOG 即相邻两尺度空间函数之差,用(,,)D x y σ来表示,如公式(3)所示: (,,)((,,)(,,))*(,)(,,)(,,)D x y G x y k G x y I x y L x y k L x y σσσσσ=-=- (7) DOG 金字塔通过高斯金字塔中相邻尺度空间函数相减即可,如图1所示。在图中,DOG 金字塔的第l 层的尺度因子与高斯金字塔的第l 层是一致的,其它阶也一样。
SIFT算法实现及代码详解
经典算法SIFT实现即代码解释: 以下便是sift源码库编译后的效果图:
为了给有兴趣实现sift算法的朋友提供个参考,特整理此文如下。要了解什么是sift算法,请参考:九、图像特征提取与匹配之SIFT算法。ok,咱们下面,就来利用Rob Hess维护的sift 库来实现sift算法: 首先,请下载Rob Hess维护的sift 库: https://www.360docs.net/doc/c35693640.html,/hess/code/sift/ 下载Rob Hess的这个压缩包后,如果直接解压缩,直接编译,那么会出现下面的错误提示: 编译提示:error C1083: Cannot open include file: 'cxcore.h': No such file or directory,找不到这个头文件。 这个错误,是因为你还没有安装opencv,因为:cxcore.h和cv.h是开源的OPEN CV头文件,不是VC++的默认安装文件,所以你还得下载OpenCV并进行安装。然后,可以在OpenCV文件夹下找到你所需要的头文件了。 据网友称,截止2010年4月4日,还没有在VC6.0下成功使用opencv2.0的案例。所以,如果你是VC6.0的用户请下载opencv1.0版本。vs的话,opencv2.0,1.0任意下载。 以下,咱们就以vc6.0为平台举例,下载并安装opencv1.0版本、gsl等。当然,你也可以用vs编译,同样下载opencv(具体版本不受限制)、gsl等。 请按以下步骤操作: 一、下载opencv1.0 https://www.360docs.net/doc/c35693640.html,/projects/opencvlibrary/files/opencv-win/1.0/OpenCV_1.0.exe
SIFT算法英文详解
SIFT: Scale Invariant Feature Transform The algorithm SIFT is quite an involved algorithm. It has a lot going on and can be come confusing, So I’ve split up the entire algorithm into multiple parts. Here’s an outline of what happens in SIFT. Constructing a scale space This is the initial preparation. You create internal representations of the original image to ensure scale invariance. This is done by generating a “scale space”. LoG Approximation The Laplacian of Gaussian is great for finding interesting points (or key points) in an image. But it’s computationally expensive. So we cheat and approximate it using the representation created earlier. Finding keypoints With the super fast approximation, we now try to find key points. These are maxima and minima in the Difference of Gaussian image we calculate in step 2 Get rid of bad key points Edges and low contrast regions are bad keypoints. Eliminating these makes the algorithm efficient and robust. A technique similar to the Harris Corner Detector is used here. Assigning an orientation to the keypoints An orientation is calculated for each key point. Any further calculations are done relative to this orientation. This effectively cancels out the effect of orientation, making it rotation invariant. Generate SIFT features Finally, with scale and rotation invariance in place, one more representation is generated. This helps uniquely identify features. Lets say you have 50,000 features. With this representation, you can easily identify the feature you’re looking for (sa y, a particular eye, or a sign board). That was an overview of the entire algorithm. Over the next few days, I’ll go through each step in detail. Finally, I’ll show you how to implement SIFT in OpenCV! What do I do with SIFT features? After you run through the algorithm, you’ll have SIFT features for your image. Once you have these, you can do whatever you want. Track images, detect and identify objects (which can be partly hidden as well), or whatever you can think of. We’ll get into this later as well. But the catch is, this algorithm is patented. >.< So, it’s good enough for academic purposes. But if you’re looking to make something commercial, look for something else! [Thanks to aLu for pointing out SURF is patented too] 1. Constructing a scale space Real world objects are meaningful only at a certain scale. You might see a sugar cube perfectly on a table. But if looking at the entire milky way, then it simply does not exist. This multi-scale nature of objects is quite common in nature. And a scale space attempts to replicate this concept
SIFT 特征提取算法详解
SIFT 特征提取算法总结 主要步骤 1)、尺度空间的生成; 2)、检测尺度空间极值点; 3)、精确定位极值点; 4)、为每个关键点指定方向参数; 5)、关键点描述子的生成。 L(x,y,σ), σ= 1.6 a good tradeoff
D(x,y,σ), σ= 1.6 a good tradeoff
关于尺度空间的理解说明:图中的2是必须的,尺度空间是连续的。在 Lowe 的论文中, 将第0层的初始尺度定为1.6,图片的初始尺度定为0.5. 在检测极值点前对原始图像的高斯平滑以致图像丢失高频信息,所以Lowe 建议在建立尺度空间前首先对原始图像长宽扩展一倍,以保留原始图像信息,增加特征点数量。尺度越大图像越模糊。 next octave 是由first octave 降采样得到(如2) , 尺度空间的所有取值,s为每组层数,一般为3~5 在DOG尺度空间下的极值点 同一组中的相邻尺度(由于k的取值关系,肯定是上下层)之间进行寻找
在极值比较的过程中,每一组图像的首末两层是无法进行极值比较的,为了满足尺度 变化的连续性,我们在每一组图像的顶层继续用高斯模糊生成了 3 幅图像, 高斯金字塔有每组S+3层图像。DOG金字塔每组有S+2层图像.
If ratio > (r+1)2/(r), throw it out (SIFT uses r=10) 表示DOG金字塔中某一尺度的图像x方向求导两次 通过拟和三维二次函数以精确确定关键点的位置和尺度(达到亚像素精度)?
直方图中的峰值就是主方向,其他的达到最大值80%的方向可作为辅助方向 Identify peak and assign orientation and sum of magnitude to key point The user may choose a threshold to exclude key points based on their assigned sum of magnitudes. 利用关键点邻域像素的梯度方向分布特性为每个关键点指定方向参数,使算子具备 旋转不变性。以关键点为中心的邻域窗口内采样,并用直方图统计邻域像素的梯度 方向。梯度直方图的范围是0~360度,其中每10度一个柱,总共36个柱。随着距中心点越远的领域其对直方图的贡献也响应减小.Lowe论文中还提到要使用高斯函 数对直方图进行平滑,减少突变的影响。
SIFT算法C语言逐步实现详解
SIFT算法C语言逐步实现详解(上) 引言: 在我写的关于sift算法的前倆篇文章里头,已经对sift算法有了初步的介绍:九、图像特征提取与匹配之SIFT算法,而后在:九(续)、sift算法的编译与实现里,我也简单记录下了如何利用opencv,gsl等库编译运行sift程序。 但据一朋友表示,是否能用c语言实现sift算法,同时,尽量不用到opencv,gsl等第三方库之类的东西。而且,Rob Hess维护的sift 库,也不好懂,有的人根本搞不懂是怎么一回事。 那么本文,就教你如何利用c语言一步一步实现sift算法,同时,你也就能真正明白sift算法到底是怎么一回事了。 ok,先看一下,本程序最终运行的效果图,sift 算法分为五个步骤(下文详述),对应以下第二--第六幅图:
sift算法的步骤 要实现一个算法,首先要完全理解这个算法的原理或思想。咱们先来简单了解下,什么叫sift算法: sift,尺度不变特征转换,是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由David Lowe 在1999年所发表,2004年完善总结。 所谓,Sift算法就是用不同尺度(标准差)的高斯函数对图像进行平滑,然后比较平滑后图像的差别, 差别大的像素就是特征明显的点。 以下是sift算法的五个步骤: 一、建立图像尺度空间(或高斯金字塔),并检测极值点 首先建立尺度空间,要使得图像具有尺度空间不变形,就要建立尺度空间,sift算法采用了高斯函数来建立尺度空间,高斯函数公式为:
上述公式G(x,y,e),即为尺度可变高斯函数。 而,一个图像的尺度空间L(x,y,e) ,定义为原始图像I(x,y)与上述的一个可变尺度的2维高斯函数G(x,y,e) 卷积运算。 即,原始影像I(x,y)在不同的尺度e下,与高斯函数G(x,y,e)进行卷积,得到L(x,y,e),如下: 以上的(x,y)是空间坐标,e,是尺度坐标,或尺度空间因子,e的大小决定平滑程度,大尺度对应图像的概貌特征,小尺度对应图像的细节特征。大的e值对应粗糙尺度(低分辨率),反之,对应精细尺度(高分辨率)。 尺度,受e这个参数控制的表示。而不同的L(x,y,e)就构成了尺度空间,具体计算的时候,即使连续的高斯函数,都被离散为(一般为奇数大小)(2*k+1) *(2*k+1)矩阵,来和数字图像进行卷积运算。 随着e的变化,建立起不同的尺度空间,或称之为建立起图像的高斯金字塔。 但,像上述L(x,y,e) = G(x,y,e)*I(x,y)的操作,在进行高斯卷积时,整个图像就要遍历所有的像素进行卷积(边界点除外),于此,就造成了时间和空间上的很大浪费。 为了更有效的在尺度空间检测到稳定的关键点,也为了缩小时间和空间复杂度,对上述的操作作了一个改建:即,提出了高斯差分尺度空间(DOG scale-space)。利用不同尺度的高斯差分与原始图像I(x,y)相乘,卷积生成。 DOG算子计算简单,是尺度归一化的LOG算子的近似。 ok,耐心点,咱们再来总结一下上述内容: 1、高斯卷积 在组建一组尺度空间后,再组建下一组尺度空间,对上一组尺度空间的最后一幅图像进行二分之一采样,得到下一组尺度空间的第一幅图像,然后进行像建立第一组尺度空间那样的操作,得到第二组尺度空间,公式定义为 L(x,y,e) = G(x,y,e)*I(x,y)
SIFT算法分析
SIFT算法分析 1 SIFT 主要思想 SIFT算法是一种提取局部特征的算法,在尺度空间寻找极值点,提取位置,尺度,旋转不变量。 2 SIFT 算法的主要特点: a)SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性。 b)独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进 行快速、准确的匹配。 c)多量性,即使少数的几个物体也可以产生大量SIFT特征向量。 d)高速性,经优化的SIFT匹配算法甚至可以达到实时的要求。 e)可扩展性,可以很方便的与其他形式的特征向量进行联合。 3 SIFT 算法流程图:
4 SIFT 算法详细 1)尺度空间的生成 尺度空间理论目的是模拟图像数据的多尺度特征。 高斯卷积核是实现尺度变换的唯一线性核,于是一副二维图像的尺度空间定义为: L( x, y, ) G( x, y, ) I (x, y) 其中G(x, y, ) 是尺度可变高斯函数,G( x, y, ) 2 1 2 y2 (x ) 2 e / 2 2 (x,y)是空间坐标,是尺度坐标。大小决定图像的平滑程度,大尺度对应图像的概貌特征,小尺度对应图像的细节特征。大的值对应粗糙尺度(低分辨率),反之,对应精细尺度(高分辨率)。 为了有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间(DOG scale-space)。利用不同尺度的高斯差分核与图像卷积生成。 D( x, y, ) (G( x, y,k ) G( x, y, )) I ( x, y) L( x, y,k ) L( x, y, ) DOG算子计算简单,是尺度归一化的LoG算子的近似。图像金字塔的构建:图像金字塔共O组,每组有S层,下一组的图像由上一 组图像降采样得到。 图1由两组高斯尺度空间图像示例金字塔的构建,第二组的第一副图像由第一组的第一副到最后一副图像由一个因子2降采样得到。图2 DoG算子的构建: 图1 Two octaves of a Gaussian scale-space image pyramid with s =2 intervals. The first image in the second octave is created by down sampling to last image in the previous
sift算法详解
尺度不变特征变换匹配算法详解 Scale Invariant Feature Transform(SIFT) Just For Fun 张东东zddmail@https://www.360docs.net/doc/c35693640.html, 对于初学者,从David G.Lowe的论文到实现,有许多鸿沟,本文帮你跨越。 1、SIFT综述 尺度不变特征转换(Scale-invariant feature transform或SIFT)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由David Lowe在1999年所发表,2004年完善总结。 其应用范围包含物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影像追踪和动作比对。 此算法有其专利,专利拥有者为英属哥伦比亚大学。 局部影像特征的描述与侦测可以帮助辨识物体,SIFT特征是基于物体上的一些局部外观的兴趣点而与影像的大小和旋转无关。对于光线、噪声、些微视角改变的容忍度也相当高。基于这些特性,它们是高度显著而且相对容易撷取,在母数庞大的特征数据库中,很容易辨识物体而且鲜有误认。使用SIFT特征描述对于部分物体遮蔽的侦测率也相当高,甚至只需要3个以上的SIFT物体特征就足以计算出位置与方位。在现今的电脑硬件速度下和小型的特征数据库条件下,辨识速度可接近即时运算。SIFT特征的信息量大,适合在海量数据库中快速准确匹配。 SIFT算法的特点有: 1.SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性; 2.独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配; 3.多量性,即使少数的几个物体也可以产生大量的SIFT特征向量; 4.高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
SIFT算法与RANSAC算法分析
概率论问题征解报告: (算法分析类) SIFT算法与RANSAC算法分析 班级:自23 姓名:黄青虬 学号:2012011438 作业号:146
SIFT 算法是用于图像匹配的一个经典算法,RANSAC 算法是用于消除噪声的算法,这两者经常被放在一起使用,从而达到较好的图像匹配效果。 以下对这两个算法进行分析,由于sift 算法较为复杂,只重点介绍其中用到的概率统计概念与方法——高斯卷积及梯度直方图,其余部分只做简单介绍。 一. SIFT 1. 出处:David G. Lowe, The Proceedings of the Seventh IEEE International Conference on (Volume:2, Pages 1150 – 1157), 1999 2. 算法目的:提出图像特征,并且能够保持旋转、缩放、亮度变化保持不变性,从而 实现图像的匹配 3. 算法流程图: 原图像 4. 算法思想简介: (1) 特征点检测相关概念: ◆ 特征点:Sift 中的特征点指十分突出、不会因亮度而改变的点,比如角点、边 缘点、亮区域中的暗点等。特征点有三个特征:尺度、空间和大小 ◆ 尺度空间:我们要精确表示的物体都是通过一定的尺度来反映的。现实世界的 物体也总是通过不同尺度的观察而得到不同的变化。尺度空间理论最早在1962年提出,其主要思想是通过对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行尺度空间主轮廓的提取,并以该主轮廓作为一种特征向量,实现边缘、角点检测和不同分辨率上的特征提取等。尺度空间中各尺度图像的模糊程度逐渐变大,能够模拟人在距离目标由近到远时目标在视网膜上的形成过程。尺度越大图像越模糊。 ◆ 高斯模糊:高斯核是唯一可以产生多尺度空间的核,一个图像的尺度空间,L (x,y,σ) ,定义为原始图像I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算 高斯函数: 高斯卷积的尺度空间: 不难看到,高斯函数与正态分布函数有点类似,所以在计算时,我们也是 ()()() ,,,,*,L x y G x y I x y σσ=()22221 ()(),,exp 22i i i i x x y y G x y σπσσ??-+-=- ? ??
SIFT算法和卷积神经网络算法在图像检索领域的应用分析
SIFT算法和卷积神经网络算法在图像检索领域的应用分析 1、引言 基于内容的图像检索是由于图像信息的飞速膨胀而得到关注并被提出来的。如何快速准确地提取图像信息内容是图像信息检索中最为关键的一步。传统图像信息检索系统多利用图像的底层特征,如颜色、纹理、形状以及空间关系等。这些特征对于图像检索有着不同的结果,但是同时也存在着不足,例如:颜色特征是一种全局的特征,它对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好的捕捉图像中对象的局部特征,也不能表达颜色空间分布的信息。纹理特征也是一种全局特征,它只是物体表面的一种特性,并不能完全反映物体的本质属性。基于形状的特征常常可以利用图像中感兴趣的目标进行检索,但是形状特征的提取,常常受到图像分割效果的影响。空间关系特征可以加强对图像内容的描述和区分能力,但空间关系特征对图像或者,目标的旋转、平移、尺度变换等比较敏感,并且不能准确地表达场景的信息。图像检索领域急需一种能够对目标进行特征提取,并且对图像目标亮度、旋转、平移、尺度甚至仿射不变的特征提取算法。 2、SIFT特征 SIFT(Scale-Invariant Feature Transform,尺度不变特征转换)是一种电脑视觉的算法,用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由David Lowe在1999年所发表,2004年完善总结。 局部特征的描述与侦测可以帮助辨识物体,SIFT特征是基于物体上的一些局部外观的兴趣点,与目标的大小和旋转无关,对于光线、噪声、些微视角改变的容忍度也相当高。使用SIFT特征描述对于部分物体遮蔽的侦测成功率也相当高,甚至只需要3个以上的SIFT 物体特征就足以计算出位置与方位。在现今的电脑硬件速度和小型的特征数据库条件下,辨识速度可接近即时运算。SIFT特征的信息量大,也适合在海量数据库中快速准确匹配。 SIFT算法的特点有: (1)SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变形,是非常稳定的局部特征,现在应用非常广泛。(仿射变换,又称仿射映射,是指在几何中,一个向量空间进行一次线性变换并加上一个平移,变换为另一个向量空间。) (2)独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配; (3)多量性,即使少数的几个物体也可以产生大量的SIFT特征向量; (4)高速性,经优化的SIFT匹配算法甚至可以达到实时的要求; (5)可扩展性,可以很方便的与其他形式的特征向量进行联合。 SIFT算法可以解决的问题:目标的自身状态、场景所处的环境和成像器材的成像特性等因素影响图像配准/目标识别跟踪的性能。 而SIFT算法在一定程度上可解决:
SIFT算法实现原理步骤
SIFT 算法实现步骤 :1 关键点检测、2 关键点描述、3 关键点匹配、4 消除错配点 1关键点检测 1.1 建立尺度空间 根据文献《Scale-space theory: A basic tool for analysing structures at different scales 》我们可知,高斯核是唯一可以产生多尺度空间的核,一个图像的尺度空间,L (x,y,σ) ,定义为原始图像I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。 高斯函数 高斯金字塔 高斯金子塔的构建过程可分为两步: (1)对图像做高斯平滑; (2)对图像做降采样。 为了让尺度体现其连续性,在简单 下采样的基础上加上了高斯滤波。 一幅图像可以产生几组(octave ) 图像,一组图像包括几层 (interval )图像。 高斯图像金字塔共o 组、s 层, 则有: σ——尺度空间坐标;s ——sub-level 层坐标;σ0——初始尺度;S ——每组层数(一般为3~5)。 当图像通过相机拍摄时,相机的镜头已经对图像进行了一次初始的模糊,所以根据高斯模糊的性质: -第0层尺度 --被相机镜头模糊后的尺度 高斯金字塔的组数: M 、N 分别为图像的行数和列数 高斯金字塔的组内尺度与组间尺度: 组内尺度是指同一组(octave )内的尺度关系,组内相邻层尺度化简为: 组间尺度是指不同组直接的尺度关系,相邻组的尺度可化为: 最后可将组内和组间尺度归为: ()22221 ()(),,exp 22i i i i x x y y G x y σπσσ??-+-=- ? ??()()(),,,,*,L x y G x y I x y σσ=Octave 1 Octave 2 Octave 3 Octave 4 Octave 5σ2σ 4σ8 σ 0()2s S s σσ= g 0σ=init σpre σ()() 2log min ,3O M N ??=-?? 1 12S s s σσ+=g 1()2s S S o o s σσ++=g 222s S s S S o o σσ+=g g 121 2(,,,) i n k k k σσσσ--L 1 2 S k =
遥感图像处理在汶川地震中的应用分析
遥感图像处理在汶川地震中的应用分析 摘要 随着卫星技术的快速发展,遥感技术被越来越广泛的应用于国民经济的各个方面。本文结合汶川地震中遥感技术的应用实例,系统阐述了遥感应用于应急系统中需要解决的一系列关键技术问题。并就数据获取、薄云去除、图像镶嵌、图像解译,以及灾后重建中的若干关键技术问题展开了分析。关键词:遥感;地震;应用;关键技术 1 引言 长期以来,人们不断遭受到各种自然灾害的侵害,如地震、火山、洪水等,同时,由人为因素导致的灾难也不断发生,如火灾、恐怖袭击等。这些灾害具备破坏性、突发性、连锁性、难预报性等特点,往往容易造成重大的人员伤亡和巨大的财产损失。为了有效的应对突发事件,产生了各类应急系统。 灾区数据的实时获取足所有应急系统的基础。对于区域性的灾害,传统的地面调查方式,由于速度慢、面积小、需要人员现场勘查等无法避免的特点,很难满足应急系统的需要。相对而言,遥感技术有其得天独厚的优势:遥感传感器能实时的、大面积的、无接触的获取灾区数据,因此成为绝大多数应急系统中数据获取的主要手段。为了使遥感数据能满足应急系统中基础数据的要求,需要经过数据获取、数据预处理、图像解译等阶段的处理,最终提取出准确的遥感信息。下面将根据这三个阶段的处理技术展开阐述与分析,并以汶川地震为例,介绍遥感技术在应急救灾及灾后重建中的应用。 2 数据获取 灾害发生后,由于地形、气象等客观因素的影响,通过单一的遥感传感器往往很难获得灾区所有数据,需要充分发挥多种传感器的优势,获取灾区的各种类型数据,主要包括光学与SAR卫星遥感影像、光学与SAR航空遥感影像两大类。 2.1 光学与SAR卫星遥感影像的获取 此类数据包括国内外的众多高分辨率光学与SAR卫星遥感影像。从时间上说,重点是灾害发生前后数据的获取,以快速确定灾区的位置和前后的变化。 2.2 光学与SAR航空遥感影像的获取 此类数据是利用高空遥感琶机、无人机和卣升机等高、低空遥感平台,搭载遥感传感器,快速
SIFT特征提取分析
SIFT(Scale-invariant feature transform)是一种检测局部特征的算法,该算法通过求一幅图中的特征点(interest points, or corner points)及其有关scale 和orientation 的描述子得到特征并进行图像特征点匹配,获得了良好效果,详细解析如下: 算法描述 SIFT特征不只具有尺度不变性,即使改变旋转角度,图像亮度或拍摄视角,仍然能够得到好的检测效果。整个算法分为以下几个部分: 1. 构建尺度空间 这是一个初始化操作,尺度空间理论目的是模拟图像数据的多尺度特征。 高斯卷积核是实现尺度变换的唯一线性核,于是一副二维图像的尺度空间定义为: 其中G(x,y,σ) 是尺度可变高斯函数 (x,y)是空间坐标,是尺度坐标。σ大小决定图像的平滑程度,大尺度对应图像的概貌特征,小尺度对应图像的细节特征。大的σ值对应粗糙尺度(低分辨率),反之,对应精细尺度(高分辨率)。为了有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间(DOG scale-space)。利用不同尺度的高斯差分核与图像卷积生成。 下图所示不同σ下图像尺度空间:
关于尺度空间的理解说明:2kσ中的2是必须的,尺度空间是连续的。在 Lowe的论文中,将第0层的初始尺度定为1.6(最模糊),图片的初始尺度定为0.5(最清晰). 在检测极值点前对原始图像的高斯平滑以致图像丢失高频信息,所以Lowe 建议在建立尺度空间前首先对原始图像长宽扩展一倍,以保留原始图像信息,增加特征点数量。尺度越大图像越模糊。 图像金字塔的建立:对于一幅图像I,建立其在不同尺度(scale)的图像,也成为子八度(octave),这是为了scale-invariant,也就是在任何尺度都能够有对应的特征点,第一个子八度的scale为原图大小,后面每个octave为上一个octave降采样的结果,即原图的1/4(长宽分别减半),构成下一个子八度(高一层金字塔)。
sift算法的MATLAB程序
% [image, descriptors, locs] = sift(imageFile) % % This function reads an image and returns its SIFT keypoints. % Input parameters: % imageFile: the file name for the image. % % Returned: % image: the image array in double format % descriptors: a K-by-128 matrix, where each row gives an invariant % descriptor for one of the K keypoints. The descriptor is a vector % of 128 values normalized to unit length. % locs: K-by-4 matrix, in which each row has the 4 values for a % keypoint location (row, column, scale, orientation). The % orientation is in the range [-PI, PI] radians. % % Credits: Thanks for initial version of this program to D. Alvaro and % J.J. Guerrero, Universidad de Zaragoza (modified by D. Lowe) function [image, descriptors, locs] = sift(imageFile) % Load image image = imread(imageFile); % If you have the Image Processing Toolbox, you can uncomment the following % lines to allow input of color images, which will be converted to grayscale. % if isrgb(image) % image = rgb2gray(image); % end [rows, cols] = size(image); % Convert into PGM imagefile, readable by "keypoints" executable f = fopen('tmp.pgm', 'w'); if f == -1 error('Could not create file tmp.pgm.'); end fprintf(f, 'P5\n%d\n%d\n255\n', cols, rows); fwrite(f, image', 'uint8'); fclose(f); % Call keypoints executable if isunix command = '!./sift '; else command = '!siftWin32 '; end command = [command '
SIFT算法分析
SIFT算法分析 1 SI F T主要思想 S IF T算法就是一种提取局部特征得算法,在尺度空间寻找极值点,提取位置,尺度,旋转不变量。 2 SI FT算法得主要特点 a)SIFT特征就是图像得局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度得稳定性。 b )独特性(Dis t in c t iv e n es s)好,信息量丰富,适用于在海量特征数据库中进行快速、准确得匹配? c) 多量性,即使少数得几个物体也可以产生大量S IFT特征向量。 d) 高速性,经优化得SIF T匹配算法甚至可以达到实时得要求。 e) 可扩展性,可以很方便得与其她形式得特征向量进行联合。 3 SI F T算法流程图: 爹尺度空间扱值点检测 特征点的精确定位 I*
特征点的主方向计算 描述子的构造 特征向童I*
4 SIFT 算法详细 1)尺度空间得生成 尺度空间理论目得就是模拟图像数据得多尺度特征 . 高斯卷积核就是实现尺度变换得唯一线性核,于就是一副二维图像得尺度 空间定义为: 其中就是尺度可变高斯函数, (x ,y )就是空间坐标,就是尺度坐标.大小决定图像得平滑程度,大尺度对 应图像得概貌特征,小尺度对应图像得细节特征。大得值对应粗糙尺度 (低分辨 率),反之,对应精细尺度(高分辨率)。 为了有效得在尺度空间检测到稳定得关键点,提出了高斯差分尺度空间 (D O G seal e — s p ace ).利用不同尺度得高斯差分核与图像卷积生成。 D(x,y, ) (G(x, y,k ) G(x, y, )) I(x,y) L(x, y,k ) L(x, y,) D OG 算子计算简单,就是尺度归一化得L o G 算子得近似。 图像金字塔得构建:图像金字塔共O 组,每组有S 层,下一组得图像由上一组图 像降采样得到。 图1由两组高斯尺度空间图像示例金字塔得构建, 第二组得第一副图像由第 一组得第一副到最后一副图像由一个因子 2降采样得到。图2 DoG 算子得构建: t o last image in t h e p revio us 图 1 Tw o o ct a ves of a G aus sia n s cale-spac e i ma g e pyr amid with s = 2 inte r vals 、Th e fir s t image i n t h e sec o nd o e t a ve is created b y dow n sa m p l ing Oj-taw J Octave 聖
深度解析:移动机器人的几种视觉算法
深度解析:移动机器人的几种视觉算法谈到移动机器人,大家第一印象可能是服务机器人,实际上无人驾驶汽车、可自主飞行的无人机等等都属于移动机器人范畴。它们能和人一样能够在特定的环境下自由行走/飞行,都依赖于各自的定位导航、路径规划以及避障等功能,而视觉算法则是实现这些功能关键技术。 如果对移动机器人视觉算法进行拆解,你就会发现获取物体深度信息、定位导航以及壁障等都是基于不同的视觉算法,本文就带大家聊一聊几种不同但又必不可少的视觉算法组成。 本文作者陈子冲,系Segway Robot架构师和算法负责人。 移动机器人的视觉算法种类 Q:实现定位导航、路径规划以及避障,那么这些过程中需要哪些算法的支持? 谈起移动机器人,很多人想到的需求可能是这样的:“嘿,你能不能去那边帮我拿一杯热拿铁过来。”这个听上去对普通人很简单的任务,在机器人的世界里,却充满了各种挑战。为了完成这个任务,机器人首先需要载入周围环境的地图,精确定位自己在地图中的位置,然后根据地图进行路径规划控制自己完成移动。 而在移动的过程中,机器人还需要根据现场环境的三维深度信息,实时的躲避障碍物直至到达最终目标点。在这一连串机器人的思考过程中,可以分解为如下几部分的视觉算法: 1.深度信息提取 2.视觉导航 3.视觉避障 后面我们会详细说这些算法,而这些算法的基础,是机器人脑袋上的视觉传感器。 视觉算法的基础:传感器 Q:智能手机上的摄像头可以作为机器人的眼睛吗? 所有视觉算法的基础说到底来自于机器人脑袋上的视觉传感器,就好比人的眼睛和夜间视力非常好的动物相比,表现出来的感知能力是完全不同的。同样的,一个眼睛的动物
对世界的感知能力也要差于两个眼睛的动物。每个人手中的智能手机摄像头其实就可以作为机器人的眼睛,当下非常流行的Pokeman Go游戏就使用了计算机视觉技术来达成AR 的效果。 像上图画的那样,一个智能手机中摄像头模组,其内部包含如下几个重要的组件:镜头,IR filter,CMOS sensor。其中镜头一般由数片镜片组成,经过复杂的光学设计,现在可以用廉价的树脂材料,做出成像质量非常好的手机摄像头。 CMOS sensor上面会覆盖着叫做Bayer三色滤光阵列的滤色片。每个不同颜色的滤光片,可以通过特定的光波波长,对应CMOS感光器件上就可以在不同位置分别获得不同颜色的光强了。如果CMOS传感器的分辨率是4000x3000,为了得到同样分辨率的RGB 彩色图像,就需要用一种叫做demosaicing的计算摄像算法,从2绿1蓝1红的2x2网格中解算出2x2的RGB信息。
OpenCV SIFT特征算法详解与使用
SIFT概述 SIFT特征是非常稳定的图像特征,在图像搜索、特征匹配、图像分类检测等方面应用十分广泛,但是它的缺点也是非常明显,就是计算量比较大,很难实时,所以对一些实时要求比较高的常见SIFT算法还是无法适用。如今SIFT算法在深度学习特征提取与分类检测网络大行其道的背景下,已经越来越有鸡肋的感觉,但是它本身的算法知识还是很值得我们学习,对我们也有很多有益的启示,本质上SIFT算法是很多常见算法的组合与巧妙衔接,这个思路对我们自己处理问题可以带来很多有益的帮助。特别是SIFT特征涉及到尺度空间不变性与旋转不变性特征,是我们传统图像特征工程的两大利器,可以扩展与应用到很多图像特征提取的算法当中,比如SURF、HOG、HAAR、LBP等。夸张一点的说SIFT算法涵盖了图像特征提取必备的精髓思想,从特征点的检测到描述子生成,完成了对图像的准确描述,早期的ImageNet 比赛中,很多图像分类算法都是以SIFT与HOG特征为基础,所有SIFT算法还是值得认真详细解读一番的。SIFT特征提取归纳起来SIFT特征提取主要有如下几步: ?构建高斯多尺度金字塔 ?关键点精准定位与过滤 ?关键点方向指派 ?描述子生成 构建高斯多尺度金字塔 常见的高斯图像金字塔是每层只有一张图像,大致如下: 上述的是通过图像金字塔实现了多分辨率,如果我们在每一层高斯金字塔图像生成的时候,给予不同的sigma值,这样不同的sigam就会产生不同模糊版本的图像,在同一层中就是实现不同尺度的模糊图像,再结合高斯金
字塔,生成多个层多个尺度的金字塔,就是实现了图像的多尺度金字塔。同一张图像不同尺度高斯模糊如下: 为了在每层图像中检测 S 个尺度的极值点,DoG 金字塔每层需 S+2 张图像,因为每组的第一张和最后一张图像上不能检测极值,DoG 金字塔由高斯金字塔相邻两张相减得到,则高斯金字塔每层最少需 S+3 张图像,实际计算时 S 通常在2到5之间。SIFT算法中生成高斯金字塔的规则如下(尺度空间不变性): 关键点精准定位与过滤 对得到的每层DOG图像,计算窗口3x3x3范围除去中心点之外的26点与中心点比较大小,寻找最大值或者最小值(极值点),如下图: