设置COM口 波特率
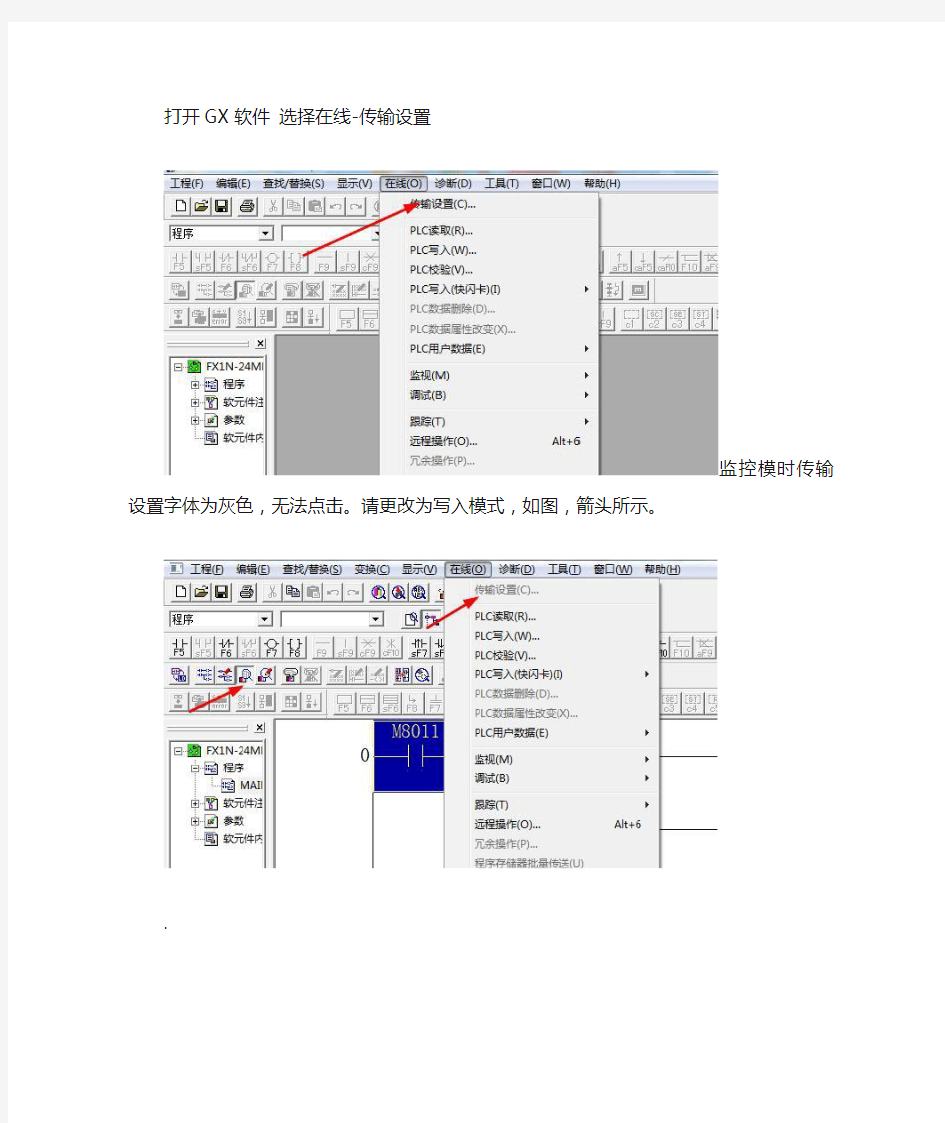

打开GX软件选择在线-传输设置
监控模时传输设置字体为灰色,无法点击。请更改为写入模式,如图,箭头所示。
.
点击串行USB图标。修改COM口
USB转串口线装好驱动后,在设备管理器内查看COM口后,修改COM口,九针串口线默认为COM1
波特率修改为9.6KPS
COM口与波特率设置完成之后点击通信测试,通信成功。
测试时请注意PLC是否处于运行状态(RUN灯常亮为运行状态,闪亮为停止状态,如果闪亮请拨动PLC上的按键开关,恢复运行状态。)
51单片机串口通信及波特率设置
51单片机串口通信及波特率设置 MCS-51单片机具有一个全双工的串行通信接口,能同时进行发送和接收。它可以作为UART(通用异步接收和发送器)使用,也可以作为同步的移位寄存器使用。 1. 数据缓冲寄存器SBUF SBUF是可以直接寻址的专用寄存器。物理上,它对应着两个寄存器,即一个发送寄存器一个接收寄存器,CPU写SBUF就是修改发送寄存器;读SBUF就是读接收寄存器。接收器是双缓冲的,以避免在接收下一帧数据之前,CPU未能及时的响应接收器的中断,没有把上一帧的数据读走而产生两帧数据重叠的问题。对于发送器,为了保持最大的传输速率,一般不需要双缓冲,因为发送时CPU是主动的,不会产生重叠问题。 2. 状态控制寄存器SCON SCON是一个逐位定义的8位寄存器,用于控制串行通信的方式选择、接收和发送,指示串口的状态,SCON即可以字节寻址也可以位寻址,字节地址98H,地址位为98H~9FH。它的各个位定义如下: MSB LSB SM0 SM1 SM2 REN TB8 RB8 TI RI SM0和SM1是串口的工作方式选择位,2个选择位对应4种工作方式,如下表,其中Fosc是振荡器的频率。 SM0 SM1 工作方式功能波特率 0 0 0 8位同步移位寄存器Fosc/12 0 1 1 10位UART 可变 1 0 2 11位UART Fosc/64或Fosc/32 1 1 3 11位UART 可变 SM2在工作方式2和3中是多机通信的使能位。在工作方式0中,SM2必须为0。在工作方式1中,若SM2=1且没有接收到有效的停止位,则接收中断标志位RI不会被激活。在工作方式2和3中若SM2=1且接收到的第9位数据(RB8)为0,则接收中断标志RB8不会被激活,若接收到的第9位数据(RB8)为1,则RI置位。此功能可用于多处理机通信。 REN为允许串行接收位,由软件置位或清除。置位时允许串行接收,清除时禁止串行接收。 TB8是工作方式2和3要发送的第9位数据。在许多通信协议中该位是奇偶位,可以按需要由软件置位或清除。在多处理机通信中,该位用于表示是地址帧还是数据帧。 RB8是工作方式2和3中接收到的第9位数据(例如是奇偶位或者地址/数据标识位),在工作方式1中若SM2=0,则RB8是已接收的停止位。在工作方式0中RB8不使用。 TI 为发送中断标志位,由硬件置位,软件清除。工作方式0中在发送第8位末尾由硬件置位;在其他工作方式时,在发送停止位开始时由硬件置位。TI=1时,申请中断。CPU 响应中断后,发送下一帧数据。在任何工作方式中都必须由软件清除TI。 RI为接收中断标志位,由硬件置位,软件清除。工作方式0中在接收第8位末尾由硬件置位;在其他工作方式时,在接收停止位的中间由硬件置位。RI=1时,申请中断,要求CPU取走数据。但在工作方式1中,SM2=1且未接收到有效的停止位时,不会对RI置位。在任何工作方式中都必须由软件清除RI。 系统复位时,SCON的所有位都被清除。 控制寄存器PCON也是一个逐位定义的8位寄存器,目前仅仅有几位有定义,如下所示:MSB LSB
51串口通信程序(带详细注释)
51串口通信程序(带详细注释) #include#include //后面有一个比较函数#define uchar unsigned char#define uint unsigned intbit UART_Flag=0; //定义串口接收标志位 uchar str[50]; //定义一数组uchar length=0; //数组长度从0 开始void init() //初 始化uart{ TMOD=0X20; //定时器1 定时器方式工作模式2,可自动重载的8 位计数器常把定时/计数器1 以模式2 作为串行口波特率发生器 SCON=0X50; //选择工作模式1 使能接收,允许发送,允许接收 EA=1; //开总中断 ES=1; //打开串口中断ET1=0; //打开定时器中断 PCON=0X80; //8 位自动重载,波特率加倍 TH1=0XFF; //用22.1184 mhz 波特率 TL1=0XFF;TR1=1; //打开中时器 }void UART_Putch(uchar dat) //输出一个字符{SBUF=dat; //把数据送给sbuf 缓 存器中 while(TI!=1);//发送标志位TI 如果发送了为1,没发送为0,没发送等待,到 了退出循环 TI=0; //到了,TI 清为0 }void init1() interrupt 4 //uart 中断,4 为串口中断{ if(RI==1) //收到数据{ uchar m=SBUF; //m 为计算机发送给串口的数据,例,open //总体思想是,计算 机通知串口,我要发数据了RI=0; //收到清0 if(m==) //判断m 这位数据有无{ UART_Putch(); //回车UART_Putch(); // 换行str[length]=; //数据最后位加0 标 志位表示发完了数据UART_Flag=1; // 传完标志位} else if(m==) { } else if(m==)//b表退格//下面几句表删锄{ UART_Putch();
51单片机课设 串口计算器
[二0一三年]
1作品简介 本作品为带有串口通信功能的计算器,PC可通过串口助手软件将算式发送至单片机,单片机立即将计算结果发送回PC,并且在液晶上显示结果。串口通信波特率为两档可调,分别为9600bps和4800bps,可通过两个按键调整,同时在液晶上会显示当前的波特率。 计算器可自动识别输入的字符串,并自动判断输入的算式是否正确;可自动识别算式中包含错误字符、除数为零、浮点数做取余运算等错误。当计算结果超出设定范围时在液晶上出现“超出范围”提示,同时向PC发送“The result is out of range! ”。 2作品整体方案 2.1 串行通信功能: 实验板和PC电脑通过USB线相连,使MCU和PC软件“串口助手”能够进行串行通信。 (1)当实验板上电时默认波特率为9600bps,并发送欢迎词和提示词,例如“Welcome to Calculator V1.0”,"You can press key1 and key2 to change baud rate.".... (2)当实验板上按键1按下时波特率变更为4800bps,按键2按下时波特率变更为9600bps,并用两个LED灯指示相应的波特率。 2.2 计算器功能 通过串口助手发送框发送需要计算的公式,例如20*4=,MCU收到后解析公式并计算结果,将结果返回给串口,例如“The result is 80”,同时将计算结果显示在数码管上,具体细节如下: (1)可以进行加(+)、减(-)、乘(*)、除(\)、取余(%)运算; (2)整形、浮点型运算; (3)当计算结果为整形数时,有效的运算结果范围是-999~9999,超过此结果,返回相应的提示符,例如“The result is out of range.”,液晶上显示“超出范围”; (4)当计算结果为浮点数时,有效的运算结果范围是-99.9~999.9,液晶上保
51单片机串口通信,232通信,485通信,程序
51单片机串口通信,232通信,485通信,程序代码1:232通信 #include
while(1) { if(flag==1) { ES=0; for(i=0;i<6;i++) { SBUF=table[i]; while(!TI); TI=0; } SBUF=a; while(!TI); TI=0; ES=1; flag=0; } } } void ser() interrupt 4 {
RI=0; a=SBUF; flag=1; } 代码2:485通信 #include
} void main() { init_1602(); init(); while(1) { if(flag==1) { display(0,a); } } } void ser() interrupt 4 { RI=0; a=SBUF; flag=1; } Love is not a maybe thing. You know when you love someone.
MSP430串口波特率的设置与计算
MSP430波特率的计算 给定一个BRCLK时钟源,波特率用来决定需要分频的因子N: N = fBRCLK/Baudrate 分频因子N通常是非整数值,因此至少一个分频器和一个调制阶段用来尽可能的接近N。 如果N等于或大于16,可以设置UCOS16选择oversampling baud Rate模式注:Round():指四舍五入。 Low-Frequency Baud Rate Mode Setting 在low-frequency mode,整数部分的因子可以由预分频实现: UCBRx = INT(N) 小数部分的因子可以用下列标称公式通过调制器实现: UCBRSx = round( ( N –INT(N) ) × 8 ) 增加或减少UCBRSx一个计数设置,对于任何给定的位可能得到一个较低的最高比特误码率。如果确定是这样的情况UCBRSx设置的每一位必须执行一个精确的错误计算。 例1:1048576Hz频率下驱动以115200波特率异步通讯 ACLK = REFO = ~32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz。 N = fBRCLK/Baudrate = 1048576/115200 = ~9.10 UCBRx = INT(N) = INT(9.10) = 9 UCBRSx = round( ( N –INT(N) )×8 ) = round( ( 9.10 –9) × 8 )=round(0.8 )=1 UCA0CTL1 |= UCSSEL_2;// 选SMCLK为时钟 UCAxBR0 = 9; UCAxBR1 = 0; UCAxMCTL = 0x02;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16 UCBRSx 为寄存器UCAxMCTL的1-3位,所以写入0x02(00000010) 例2:32768Hz频率下驱动以2400波特率异步通ACLK = REFO = ~32768Hz, MCLK = SMCLK = DCO ~1.045MHz N = fBRCLK/Baudrate = 32768/2400 = ~13.65 UCBRx = INT(N) = INT(13.65) = 13 UCBRSx = round( ( N –INT(N) )×8 ) = round( ( 13.65 –13) × 8 )=round(5.2)=5 UCA0CTL1 |= UCSSEL_1; // 选ACLK为时钟 UCAxBR0 = 13;UCAxBR1 = 0 ; UCAxMCTL = 0x0A;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16 UCBRSx为寄存器UCAxMCTL的1-3位,所以写入0x0A(00001010) Oversampling Baud Rate Mode Setting 在oversampling mode 与分频器设置如下:
单片机串口通信C程序及应用实例
一、程序代码 #include
TI = 0; } T_counter = 0; } uart_receive(void) interrupt 4 { if(RI) { RI = 0; indata[R_counter] = SBUF; R_counter++; if(R_counter>=4) { R_counter = 0; flag = 1; } } } void system_initial(void) { P1M1 = 0x00; P1M0 = 0xff; P1 = 0xff; //初始化为全部关闭 temp3 = 0x3f;//初始化temp3的值与六路输出的初始值保持一致 temp = 0xf0; R_counter = 0; T_counter = 0; } void initial_comm(void) { SCON = 0x50; //设定串行口工作方式:mode 1 ; 8-bit UART,enable ucvr TMOD = 0x21; //TIMER 1;mode 2 ;8-Bit Reload PCON = 0x80; //波特率不加倍SMOD = 1 TH1 = 0xfa; //baud: 9600;fosc = 11.0596 IE = 0x90; // enable serial interrupt TR1 = 1; // timer 1 RI = 0; TI = 0; ES = 1; EA = 1; }
CAN波特率设置及寄存器设置
CAN总线能够在一定的范围内容忍总线上CAN节点的通信波特率的偏差,这种机能使得CAN总线有很强的容错性,同时也降低了对每个节点的振荡器精度。 实际上,CAN总线的波特率是一个范围。假设定义的波特率是250KB/S,但是实际上根据对寄存器的设置,实际的波特率可能为200~300KB/S(具体值取决于寄存器的设置)。 在CAN的底层协议里将CAN数据的每一位时间(TBit)分为许多的时间段(Tscl),这些时间段包括: A.位同步时间(Tsync) B.时间段1(Tseg1) C.时间段2(Tseg2) 其中位同步时间占用1个Tscl;时间段2占用(Tseg1+1)个Tscl;时间段2占用(Tseg2+1)个Tscl,所以CAN控制器的位时间(TBit)就是: TBit=Tseg1+Tseg2+Tsync=(TSEG1+TSEG2+3)*Tscl CAN的波特率(CANbps)就是1/TBit。Tsync=1Tscl 但是这样计算出的值是一个理论值。在实际的网络通信中由于存在传输的延时、不同节点的晶体的误差等因素,使得网络CAN的波特率的计算变得复杂起来。CAN在技术上便引入了重同步的概念,以更好的解决这些问题。 这样重同步带来的结果就是要么时间段1(Tseg1)增加TSJW(同步跳转宽度SJW+1),要么时间段减少TSJW,因此CAN的波特率实际上有一个范围: 1/(Tbit+Tsjw) ≤CANbps≤1/(Tbit-Tsjw) CAN有波特率的值四以下几个元素决定: A.最小时间段Tscl; B.时间段1 TSEG1; C.时间段2 TSEG2; D.同步跳转宽度SJW SJW(重同步跳转宽度)决定了一次重同步期间一个位时间被延长或缩短的时间量子Tscl是通过总线时序寄存器设置计算的。 Tscl=(BRP+1)/FVBP。FVBP为微处理器的外设时钟。 而TSEG1与TSEG2又是怎么划分的呢?TSEG1与TSEG2的长度决定了CAN数据的采样点,这种方式允许宽范围的数据传输延迟和晶体的误差。其中TSEG1用来调整数据传输延迟时间造成的误差,而TSEG2则用来调整不同点节点晶体频率的误差。 TSEG1与TSEG2的是分大体遵循以下规则: Tseg1≥Tseg2≥2TSJW;Tseg2≥2Tscl 总的来说,对于CAN的波特率计算问题,把握一个大的方向就行了,其计算公式可了规结为: BitRate = Fpclk/( (BRP+1) * ((Tseg1+1)+(Tseg2+1)+1))
单片机波特率的计算方法
51单片机波特率计算的公式和方法 51单片机芯片的串口可以工作在几个不同的工作模式下,其工作模式的设置就是使用SCON寄存器。它的各个位的具体定义如下: SM0SM1SM2REN TB8RB8TI RI SM0、SM1为串行口工作模式设置位,这样两位可以对应进行四种模式的设置。串行口工作模式设置。 波特率在使用串口做通讯时,一个很重要的参数就是波特率,只有上下位机的波特率一样时才可以进行正常通讯。波特率是指串行端口每秒内可以传输的波特位数。这里所指的波特率,如标准9600不是每秒种可以传送9600个字节,而是指每秒可以传送9600个二进位,而一个字节要8个二进位,如用串口模式1来传输那么加上起始位和停止位,每个数据字节就要占用10个二进位,9600波特率用模式1传输时,每秒传输的字节数是9600÷10=960字节。 51芯片的串口工作模式0的波特率是固定的,为fosc/12,以一个12M的晶振来计算,那么它的波特率可以达到1M。模式2的波特率是固定在fosc/64或fosc/32,具体用那一种就取决于PCON寄存器中的SMOD位,如SMOD为0,波特率为focs/64,SMOD为1,波特率为focs/32。 模式1和模式3的波特率是可变的,取决于定时器1或2(52芯片)的溢出速率,就是说定时器1每溢出一次,串口发送一次数据。那么我们怎么去计算这两个模式的波特率设置时相关的寄存器的值呢?可以用以下的公式去计算。
上式中如设置了PCON寄存器中的SMOD位为1时就可以把波特率提升2倍。通常会使用定时器1工作在定时器工作模式2下,这时定时值中的TL1做为计数,TH1做为自动重装值,这个定时模式下,定时器溢出后,TH1的值会自动装载到TL1,再次开始计数,这样可以不用软件去干预,使得定时更准确。在这个定时模式2下定时器1溢出速率的计算公式如下: 溢出速率=(计数速率)/(256-TH1初值) 溢出速率=fosc/[12*(256-TH1初值)] 上式中的“计数速率”与所使用的晶体振荡器频率有关,在51芯片中定时器启动后会在每一个机器周期使定时寄存器TH的值增加一,一个机器周期等于十二个振荡周期,所以可以得知51芯片的计数速率为晶体振荡器频率的1/12,一个12M的晶振用在51芯片上,那么51的计数速率就为1M。通常用11.0592M 晶体是为了得到标准的无误差的波特率,那么为何呢?计算一下就知道了。如我们要得到9600的波特率,晶振为11.0592M和12M,定时器1为模式2,SMOD 设为1,分别看看那所要求的TH1为何值。代入公式: 11.0592M 9600=(2÷32)×((11.0592M/12)/(256-TH1)) TH1=250
51串口通信协议(新型篇)
51串口通信协议(新型篇) C51编程:这是网友牛毅编的一个C51串口通讯程序! //PC读MCU指令结构:(中断方式,ASCII码表示) //帧:帧头标志|帧类型|器件地址|启始地址|长度n|效验和|帧尾标志 //值: 'n' 'y'| 'r' | 0x01 | x | x | x |0x13 0x10 //字节数: 2 | 1 | 1 | 1 | 1 | 1 | 2 //求和: ///////////////////////////////////////////////////////////////////// //公司名称:*** //模块名:protocol.c //创建者:牛毅 //修改者: //功能描述:中断方式:本程序为mcu的串口通讯提供(贞结构)函数接口,包括具体协议部分 //其他说明:只提供对A T89c51具体硬件的可靠访问接口 //版本:1.0 //信息:QQ 75011221 ///////////////////////////////////////////////////////////////////// #include
MCS-51单片机串行口工作方式与波特率计算举例
MCS-51单片机串行口工作方式与波特率计算举例 1)方式0 方式0是外接串行移位寄存器方式。工作时,数据从RXD串行地输入/输出,TXD 输出移位脉冲,使外部的移位寄存器移位。波特率固定为fosc/12(即,TXD每机器周期输出一个同位脉冲时,RXD接收或发送一位数据)。每当发送或接收完一个字节,硬件置TI=1或RI=1,申请中断,但必须用软件清除中断标志。 实际应用在串行I/O口与并行I/O口之间的转换。 2)方式1 方式1是点对点的通信方式。8位异步串行通信口,TXD为发送端,RXD为 接收端。一帧为10位,1位起始位、8位数据位(先低后高)、1位停止位。波特率由T1或T2的溢出率确定。 在发送或接收到一帧数据后,硬件置TI=1或RI=1,向CPU申请中断;但必须用软件清除中断标志,否则,下一帧数据无法发送或接收。 (1)发送:CPU执行一条写SBUF指令,启动了串行口发送,同时将1写入 输出移位寄存器的第9位。发送起始位后,在每个移位脉冲的作用下,输出移位寄存器右移一位,左边移入0,在数据最高位移到输出位时,原写入的第9位1的左边全是0,检测电路检测到这一条件后,使控制电路作最后一次移位,/SEND 和DATA无效,发送停止位,一帧结束,置TI=1。 (2)接收:REN=1后,允许接收。接收器以所选波特率的16倍速率采样RXD 端电平,当检测到一个负跳变时,启动接收器,同时把1FFH写入输入移位寄存器(9位)。由于接、发双方时钟频率有少许误差,为此接收控制器把一位传送时间16等分采样RXD,以其中7、8、9三次采样中至少2次相同的值为接收值。接收位从移位寄存器右边进入,1左移出,当最左边是起始位0时,说明已接收8位数据,再作最后一次移位,接收停止位。此后: A、若RI=0、SM2=0,则8位数据装入SBUF,停止位入RB8,置RI=1。
基于51单片机的波特率自动识别系统程序
#include
串口通信测试方法
串口通信测试方法 1 关于串口通信的一些知识: RS-232C是目前最常用的串行接口标准,用来实现计算机和计算机之间、计算机和外设之间的数据通信。 在PC机系统中都装有异步通信适配器,利用它可以实现异步串行通信。而且MCS-51单片机本身具有一个全双工的串行接口,因此只要配以电平转换的驱动电路、隔离电路就可以组成一个简单可行的通信接口。 由于MCS-51单片机的输入和输出电平为TTL电平,而PC机配置的是RS-232C 标准串行接口,二者电气规范不一致,因此要完成PC机与单片机的数据通信,必须进行电平转换。 注明:3)RS-232C上传送的数字量采用负逻辑,且与地对称 逻辑1:-3 ~-15V 逻辑0:+3~+15V 所以与单片机连接时常常需要加入电平转换芯片: 2 实现串口通信的三个步骤: (1)硬件连接 51单片机有一个全双工的串行通讯口,所以单片机和计算机之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如计算机的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换。我们采用了三线制连接串口,也就是说和计算机的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。 使用MAX232串口通信电路图(9孔串口接头) (2)串行通信程序设计 ①通信协议的使用 通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种
约定,通信双方才能明白对方的意图,以进行下一步动作。假定我们需要在PC 机与单片机之间进行通信,在设计过程中,有如下约定:
CAN波特率设置时的参数计算
CAN波特率设置时的参数计算 CAN(Controller Area Network)总线最早由德国 BOSCH公司提出,主要用于汽车内部测量与控制中心之间的数据通信。由于其良好的性能,在世界范围内广泛应用于其他领域当中,如工业自动化、汽车电子、楼宇建筑、电梯网络、电力通讯和安防消防等诸多领域,并取逐渐成为这些行业的主要通讯手段。 Can 控制器器只需要进行少量的设置就可以进行通信,其中较难设置的部分就是通信波特率的计算。CAN总线能够在一定的范围内容忍总线上CAN节点的通信波特率的偏差,这种机能使得CAN总线有很强的容错性,同时也降低了对每个节点的振荡器精度。实际上,CAN总线的波特率是一个范围。假设定义的波特率是250KB/S,但是实际上根据对寄存器的设置,实际的波特率可能为200~300KB/S(具体值取决于寄存器的设置)。 CAN波特率设置时需要计算几个参数,这些参数共同决定波特率大小,由于计算比较复杂,希望有一个简易步骤,本人经过研究,找到一个简易办法,现贴出来分享,不对的地方请留言指正。需要说明的是,本人使用的can控制器是AT89C51CC03单片机中的can 首先,确定一下各项参数的取值范围: 参数范围编程值说明 BRP [1..64] 0-63 定义时间量子(时间份额)的长度tq Sync_Seg 1 tq 固定长度,总线输入与系统时钟同步 Prog_Seg [1..8]tq 0-7 补偿物理延时时间 Phase_Seg1 [1..8]tq 0-7 可通过同步暂时延长 Phase_Seg2 [1..8]tq 0-7 可通过同步暂时缩短 TSJW [1..4]tq 0-3 不能比任何一相位缓冲段长 以上是参数的取值范围,编程值是实际往寄存器里写的值,为实际取值减1。下面说一下步骤: 1、首先计算CAN时钟和波特率的比值; 2、根据比值确定预分频器的分频值BRP,计算时间量子的数目,这个数值范围是8-25; 3、将时间量子数减1(去掉Sync_Seg)后在Prog_Seg Phase_Seg1 Phase_Seg2三个参数中分配;
51单片机串口通信
一、串口通信原理 串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到计算机端,而且也能实现计算机对单片机的控制。由于其所需电缆线少,接线简单,所以在较远距离传输中,得到了广泛的运用。串口通信的工作原理请同学们参看教科书。 以下对串口通信中一些需要同学们注意的地方作一点说明: 1、波特率选择 波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。MSC-51串行端口在四种工作模式下有不同的波特率计算方法。其中,模式0和模式2波特率计算很简单,请同学们参看教科书;模式1和模式3的波特率选择相同,故在此仅以工作模式1为例来说明串口通信波特率的选择。 在串行端口工作于模式1,其波特率将由计时/计数器1来产生,通常设置定时器工作于模式2(自动再加模式)。在此模式下波特率计算公式为:波特率=(1+SMOD)*晶振频率/(384*(256-TH1)) 其中,SMOD——寄存器PCON的第7位,称为波特率倍增位; TH1——定时器的重载值。 在选择波特率的时候需要考虑两点:首先,系统需要的通信速率。这要根据系统的运作特点,确定通信的频率范围。然后考虑通信时钟误差。使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。 下面举例说明波特率选择过程:假设系统要求的通信频率在20000bit/s以下,晶振频率为12MHz,设置SMOD=1(即波特率倍增)。则TH1=256-62500/波特率 根据波特率取值表,我们知道可以选取的波特率有:1200,2400,4800,9600,19200。列计数器重载值,通信误差如下表: 因此,在通信中,最好选用波特率为1200,2400,4800中的一个。 2、通信协议的使用 通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。假定我们需要在PC机与单片机之间进行通信,在双方程式设计过程中,有如下约定:0xA1:单片机读取P0端口数据,并将读取数据返回PC机;0xA2:单片机从PC机接收一段控制数据;0xA3:单片机操作成功信息。 在系统工作过程中,单片机接收到PC机数据信息后,便查找协议,完成相应的操作。当单片机接收到0xA1时,读取P0端口数据,并将读取数据返回PC机;当单片机接收到0xA2时,单片机等待从PC机接收一段控制数据;当PC机接收到0xA3时,就表明单片机操作已经成功。 3、硬件连接 51单片机有一个全双工的串行通讯口,所以单片机和计算机之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如计算机的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换,虽然也可以用几个三极管进行模拟转换,但是还是用专用芯片更简单可靠。我们采用了三线制连接串口,也就是说和计算机的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。这是最简单的连接方法,但是对我们来说已经足够使用了,电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。
MSComm串行通讯控件设置 串口、波特率等参数方法
MSComm串行通讯控件设置串口、波特率等参数方法(转 (2010-03-07 14:07:21) 转载 分类:程序设计 标签: it 一.想一进入程序,有默认的串口参数设置: 1.把参数值设定死 在OnInitDialog()函数里添加: if (m_ctrlComm.GetPortOpen()) m_ctrlComm.SetPortOpen(FALSE); m_ctrlComm.SetCommPort(1); // 选择com1 if (!m_ctrlComm.GetPortOpen()) m_ctrlComm.SetPortOpen(TRUE); // 打开串口 else AfxMessageBox("cannot open serial port"); m_ctrlComm.SetSettings("9600, n, 8, 1"); // 波特率9600,无校验,8个数据位,1个停止位 m_ctrlComm.SetInputMode(1); // 1表示以二进制方式检取数据 m_ctrlComm.SetRThreshold(1); // 参数为1,表示每当串口接收缓冲区中有对于或等于一个字符时,将引发一个接收数据的OnComm事件 m_ctrlComm.SetInputLen(0); // 设置当前接收区数据长度为0 m_ctrlComm.GetInput(); // 先预读缓冲区以清除残留数据
2. 用COMBO BOX下拉框选择串口、波特率 m_cbPortSelect.ResetContent(); m_cbPortSelect.AddString(_T("COM1")); m_cbPortSelect.AddString(_T("COM2")); m_cbPortSelect.AddString(_T("COM3")); m_cbPortSelect.AddString(_T("COM4")); m_cbPortSelect.AddString(_T("COM5")); m_cbPortSelect.SetCurSel(3); m_cbPortRate.ResetContent(); m_cbPortRate.AddString(_T("1200")); m_cbPortRate.AddString(_T("2400")); m_cbPortRate.AddString(_T("4800")); m_cbPortRate.AddString(_T("9600")); m_cbPortRate.SetCurSel(0); 二.想动态地设置串口相关参数: CString str_setting; str_setting.Format(_T("%d, %c, %d, %d"), baud_num, 'n', 8, 1); m_ctrlComm.SetSettings(str_setting); // 设置波特率,校验位,数据位,停止位;m_ctrlComm是通信控件变量 想在Edit Box里显示实时值:
51单片机串口通信(相关例程)
51单片机串口通信 1./*打开串口调试程序,将波特率设置为9600,无奇偶校验 晶振11.0592MHz,发送和接收使用的格式相同,如都使用 字符型格式,在发送框输入hello,I Love MCU ,在接 收框中同样可以看到相同字符,说明设置和通信正确*/ #include
51单片机与蓝牙串口通信程序
#include
STM32_CAN波特率计算
一般设置CAN_SJW = 1,总结程序发现!!! can时钟是RCC_APB1PeriphClock(APB1从APB2而来,分频系数不同,导致APB1不同,mini版中一般是APB2为72Mhz,APB1是36MHz),你要注意CAN时钟频率 CAN波特率= RCC_APB1PeriphClock/(1+CAN_BS1+CAN_BS2)/CAN_Prescaler ; 另外尽可能的把采样点设置为CiA 推荐的值: 75% when 波特率> 800K 80% when 波特率> 500K 87.5% when 波特率<= 500K 所以对于100K 的波特率(假定使用8MHz 时钟) 可以修改该BS1 BS2 为: CAN_InitStructure.CAN_Prescaler=5; CAN_InitStructure.CAN_BS1=CAN_BS1_13tq; CAN_InitStructure.CAN_BS2=CAN_BS2_2tq; (1+13) / (1+13+2) = 87.5% CAN波特率计算—网友总结 STM32里的CAN 支持2.0A,2.0B, 带有FIFO,中断等, 这里主要提一下内部的时钟应用. bxCAN挂接在APB1总线上,采用总线时钟,所以我们需要知道APB1的总线时钟是多少. 我们先看看下图,看看APB1总线时钟:
APB1时钟取自AHB的分频, 而AHB又取自系统时钟的分频, 系统时钟可选HSI,HSE, PLLCLK, 这个在例程的RC设置里都有的, 然后再看看有了APB1的时钟后,如何算CAN的总线速率, 先看下图: 有了上边的这个图,基本就清楚了. 总线时钟MHz (3+TS1+TS2)*(BRP+1) ===================================================下面是我的计算: