任意形状的三角形网格划分
第9卷 第5期
1997年9月计算机辅助设计与图形学学报J.CAD &CG V o l .9,N o.5Sep.,1997
任意曲面的三角形网格划分
陈永府 张 华 陈 兴 李德群
(华中理工大学塑性模拟及模具技术国家重点实验室 武汉 430074)
摘要 把曲面分为可展曲面和不可展曲面,对可展曲面用曲面展开算法展成平面,对不可展曲面用曲面分割算法转化成平面片,在平面上运用D elaunay 三角划分法进行网格划分,然后把网格节点反映射到曲面上,从而实现任意曲面的三角形网格划分。
关键词 D elaunay 三角划分,可展曲面,不可展曲面,曲面展开算法,曲面分割算法。
1996201203收稿,1996211222收到修改稿。本文得到“八五”重点攻关项目“注塑成形的计算机仿真与交互计算”资助。陈永府,1972年生,硕士研究生,研究方向为注塑模CA E 的前处理。张 华,博士研究生,研究方向为注塑模CA E 。陈 兴,副教授,研究方向为注塑模CAD 。李德群,博士生导师,研究方向为模具CAD 、CA E 、CAM 。
1 引 言
网格划分是计算机图形学研究的重要内容。目前,有很多种网格划分算法,如拓扑分解法、节点连接法、映射单元法、基于栅格法等。这些算法在二维网格划分上各有千秋,但对三维任意曲面的网格划分,成功的例子却很少。俄国数学家D elaunay 在1934年就证明了:对于任意给定的平面点集,有且仅有一种三解剖分方法能够满足“最大2最小角”优化准则,即所有三角形的最小内角之和最大。Sib son [1]证明了平面任意给定点集的D elauay 三角划分具有整体最优化的性质,这就是说,对于任意给定的平面点集,D elaunay 三角划分能够得到整体最优的三角形网格,能尽可能地避免病态三角形的出现。所以,D elaunay 三角划分在许多应用领域,尤其是在实体几何造型和有限元网格自动生成等研究领域,受到广泛的重视。但是传统的D elaunay 三角划分不能对三维任意曲面进行网格划分,为了解决这个问题,本文把曲面分为可展曲面和不可展曲面,分别对可展曲面采用曲面展开算法,对不可展曲面采用曲面分割算法;将曲面转化为平面,然后在平面上利用D elaunay 三角划分的优化性质进行网格划分,再将网格节点反映射到曲面上(限于篇幅,本文略去网格节点反映射到曲面上的算法),从而实现任意曲面的三角形网格划分。
2 平面任意多边形域的D elaunay 三角划分
L aw son [2]根据“最大2最小角”优化准则,通过“对角线交换”法则实现了二维给定点
集的D elaunay 三角划分。W atson [3]首次提出
“插入多边形”,并在此基础上,利用“外接__________________________________________________________https://www.360docs.net/doc/c87661948.html,
圆”准则,实现了无约束的D elaunay 三角划分。而实际上,网格划分总是有一定的边界约束条件,本文在W atson 算法的基础上,实现了任意多边形域的D elaunay 三角划分。
为了和图形系统统一,规定沿面上任一条边前进时,其左侧定义为图形区域,右侧定义为非图形区域,即外环按逆时针走向,内环按顺时针走向。不失一般性,假定所有的内环和外环均由直线段组成,因为任意曲线均可用小直线段进行拟合。任意多边形域的D e 2launay 三角划分算法如下:
令多边形的边数为N ,第k 条边的起点序号为L k 1,终点序号为L k 2。
(1)若N =3,则该多边形本身是一个三角形,划分结束;否则令k =1,转入(2);
(2)令k =k +1,若L k 2在有向线段L 11L 12之左,转入(3),否则转入(2);
(3)判断当前多边形其余各边是否与线段L 11L k 2或L 12L k 2相交,若是,转入(2),否则转入(4);(4)保存节点L k 2至候选节点链表中,若k =N ,转入(5),否则转入(2);
(5)从候选节点链表中找出与节点L 11、L 12形成外接圆半径最小的节点L 02,则节点L 11、L 12和L 02必然构成一个有效的D elaunay 三角形,同时对三角形作如下修正:
①若线段L 11L 02及L 12L 02均不是当前多边形的边界线段,则令N =N +1,L 12=L 02,L N 1=L 02,L N 2=L 12,转入(1);
②若线段L 11L 02(或L 12L 02)是当前多边形的第m 条边,而线段L 12L 02(或L 11L 02)不是当前多边形的边,则令L 11=L 02(或L 12=L 02),L m 1=L N 1,L m 2=L N 2,N =N -1,转入(1);
③若线段L 11L 02和L 12L 02分别是当前多边形的第m 条边和第n 条边,则将线段L 11L 12、第m 条边和第n 条边从当前多边形中删除,N =N -3,转入(1)。
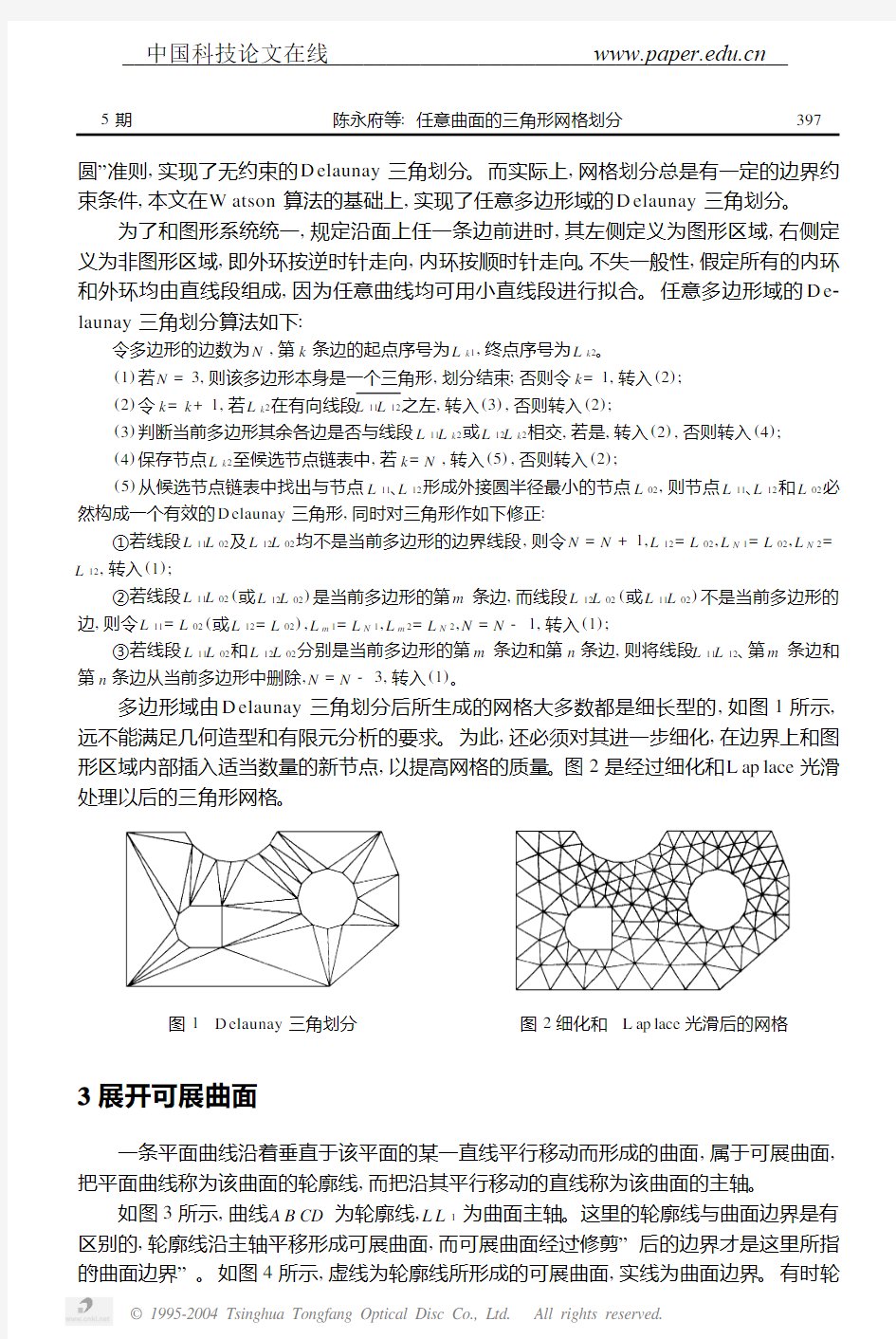
多边形域由D elaunay 三角划分后所生成的网格大多数都是细长型的,如图1所示,远不能满足几何造型和有限元分析的要求。为此,还必须对其进一步细化,在边界上和图形区域内部插入适当数量的新节点,以提高网格的质量。图2是经过细化和L ap lace 光滑处理以后的三角形网格
。
图1 D elaunay
三角划分图2 细化和L ap lace 光滑后的网格
3 展开可展曲面
一条平面曲线沿着垂直于该平面的某一直线平行移动而形成的曲面,属于可展曲面,把平面曲线称为该曲面的轮廓线,而把沿其平行移动的直线称为该曲面的主轴。
如图3所示,曲线A B CD 为轮廓线,L L 1为曲面主轴。这里的轮廓线与曲面边界是有区别的,轮廓线沿主轴平移形成可展曲面,而可展曲面经过“修剪”后的边界才是这里所指的“曲面边界”。如图4所示,虚线为轮廓线所形成的可展曲面,实线为曲面边界。有时轮
7935期陈永府等:任意曲面的三角形网格划分
廓线可以与部分边界重合
。
图3
可展曲面的轮廓线和主轴图4 曲面边界示意图
为叙述方便,假设主轴与Y 轴平行(实际上,可为任意直线),轮廓线和曲面边界均由直线和圆弧组成。设有N 段轮廓线和M 条边界,且设S S k 1、S S k 2、
S S k 3表示第k 段轮廓线的起点、终点和中间任一点(直线时,无第三点,圆弧时有第三点,以下同);PS k 1、PS k 2、PS k 3是S S k 1、S S k 2、S S k 3转化到平面后所对应的点;S E k 1、S E k 2、S E k 3是第k 条边界的点;P E k 1、P E k 2、P E k 3是S E k 1、S E k 2、S E k 3转化到平面后所对应的点;L ength (A B )表示A 、B 两点之间轮廓线的长度,若A 、B 点不在轮廓线上,则表示沿主轴向轮廓线投影后所对应的长度。则曲面展开算法如下:
(1)k =1,PS k 1->x =S S k 1->x ,PS k 1->y =S S k 1->y ,PS k 1->z =010。
(2)PS k 2->x =S S k 1->x +L ength (S S k 1S S k 2),PS k 2->y =S S k 2->y ,PS k 2->z =010。(3)若k
(4)若k >M ,则结束;否则,若第k 条边界是直线,则转入(5);若是圆弧,则转入(6)。
(5)按照(7)将S E k 1、S E k 2转化成P E k 1、P E k 2,且P E k 1P E k 2为直线;k =k +1,转入(4)。
(6)按照(7)将S E k 1、S E k 2、S E k 3转化成P E k 1、P E k 2、P E k 3,且若P E k 1->y 、P E k 2->y 与P E k 3->y 相等,则P E k 1P E k 2P E k 3为直线;否则,P E k 1P E k 2P E k 3为圆弧;k =k +1,转入(4)。
(7)若S E k i (i =1,2,3)对应于第m 段轮廓线,则P E k i ->x =S S m 1->x +L ength (S S m 1S E k i ),P E k i ->y =S E k i ->y ,P E k i ->z =010。
将可展曲面展成平面以后,用任意多边形域的D elaunay 三角划分算法对其进行网格划分,然后把网格节点反映射到曲面上去,从而实现可展曲面的三角形网格划分。图5 曲面分割示意图
4 分割不可展曲面
由于双三次B ezier 曲面应用最为广泛,所
以本文只讨论双三次B ezier 曲面的分割[6]。
411 双三次Bez ier 曲面的分割
设双三次B ezier 曲面P (u ,w )被等参数
线u =u s ,w =w s 分成4个曲面片:Q (t ,v )、
R (t ,v )、G (t ,v )和W (t ,v ),其中t ,v 为分割
后的曲面参数,如图5所示。893计算机辅助设计与图形学学报1997年
下面求解曲面片Q (t ,v )的控制点阵B Q ,P (u ,w )为
P (u ,w )=u 3 u 2 u
1M B B B M T B w 3 w 2 w 1
T 首先进行参数变换,令t =u u s ,v =w
w s ,则P (u ,w
)=u 3 u 2 u 1M B B B M T B w 3 w 2 w 1
T =
(tu s )3 (
tu s )2 (tu s ) 1M B B B M T B (vw s )3
(vw s )2 (vw s ) 1
T =t 3 t 2 t 1 d iag (u s 3 u s 2 u s 1) M B B B M T B
d iag (w s 3 w s 2 w s
1) v 3 v 2 v
1T =t 3 t 2 t 1 M B 1
00
0(1-u s )u s 0
0(1-u s )22(1-u s )u s u s 20
(1-u s )3
3(1-u s )2u s 3(1-u s )u s 2u s 3 B B 1(
1-w s )(1-w s )2(1-w s )3
w s 2(1-w s )w s 3(1-w s )2w s 0
0w 2s 3(1-w s )w s 2000w s 3
M T B v 3 v 2 v 1T 由于曲面P (u ,w )中的0≤u ≤u s ,0≤w ≤w s 部分即为曲面片Q
(t ,v )(0≤t ≤1,0≤v ≤1),所以,曲面片Q (t ,v )的控制点阵B Q 为
B Q =10
00(1-u s )u s 00(1-u s )22(1-u s )u s u s
20(1-u s )3
3(1-u s )2u s 3(1-u s )u s 2u s 3 B B 1
(1-w s )(1-w s )2(1-w s )30
w s 2(1-w s )w s 3(1-w s )2w s 0
0w s 23(1-w s )w s 2000w s 3
同理,可求得曲面片R (t ,v )、G (t ,v )和W (t ,v )的控制点阵B R 、B G 和B W 。
412 曲面片的平面度计算
设P (u ,w )(Α≤u ≤Β,Ν≤w ≤?)是参数曲面,则d (P (u ,w ),[Α,Β,Ν,?])为P (u ,w )(Α≤u ≤Β,Ν≤w ≤?
)的高度[7],且d (P (u ,w ),[Α,Β,Ν,?])=sup Α≤u ≤ΒΝ≤w ≤?(inf (d a ta )Χi ≥0,i =1,2,3,4Χ1+Χ2+Χ3+Χ4
=1)d a ta =P (u ,w )-[Χ1(P (Α,Ν)+?)+Χ2(P (Β,Ν
)-?)+Χ3(P (Β,?)+?)+Χ4(P (Α
,?)-?)]?=(P (Α,Ν)+P (Β,?)-P (Α,?)-P (Β,Ν)) 4
上式中,之所以选(P (Α,Ν)+?),(P (Β,Ν)-?),(P (Β,?)+?),(P (Α,?
)-?)4个点,是因为这4个点总是共面的[7]。
曲面片的平面度定义为曲面的高度除以曲面片的面积,曲面片的面积以4个角点构9935期陈永府等:任意曲面的三角形网格划分
图6 平面度定义示意图
成的四边形代替。所以,如图6所示,P (u ,w )的平
面度为
Εp =d (P (u ,w ),[0,1,0,1])
(S ?A B D +S ?B CD )其中,B D 为较短的对角线。
413 曲面分割算法
对每一个双三次B ezier 曲面,求其曲面高度,
再计算其平面度,当平面度小于值Εp d 时不再分割,
否则令u s =015,w s =015,将它分割成4个双三次
B ezier 曲面片,再依次判断,循环上述过程,直至所有的双三次B ezier 曲面片的平面度均小于Εp d 。此
时将所有曲面片近似为平面片。考虑到分割后的平面片既要尽可能地逼近曲面,又要使分
割后的平面片在生成网格时有较好的网格质量,Εp d 一般取110×10
-4-110×10-6。不可展曲面分割成可以近似为平面的双三次B ezier 曲面片以后,就可视其为平面,用任意多边形域的D elaunay 三角划分算法对其进行网格划分,然后把网格节点反映射到曲面上去,从而实现了不可展曲面的三角形网格划分。
5 综合分析
通过对各种图形的网格划分,笔者发现用曲面展开算法和曲面分割算法处理后的曲面,在生成网格时各有优缺点:
(1)前者的处理速度明显优于后者。
(2)前者形成的图形域大,网格生成以后,经过L ap lace 光滑处理,网格更趋于理想状态等边三角形;而后者形成的图形域小,L ap lace 光滑处理,效果不明显。
(3)前者可在图形域内部加入一定的控制点,使网格局部自动加密,而后者却不能做到这一点。
(4)后者处理曲面后,所生成的网格质量要受曲面片面积大小的影响。曲面片的面积越小,越逼近曲面,但其生成的网格质量却越差;相反,曲面片的面积越大,逼近曲面的程度就越低,但其生成的网格质量却越好。所以在分割曲面时,要适当选取曲面片的平面度
Εp d 的大小
。(5)后者可处理任意曲面(包括可展曲面和不可展曲面),而前者却只能处理可展曲面。由于它们各有优缺点,所以在应用中要扬长避短。如图7所示的曲面,其右半部分采用曲面展开算法,而左半部分采用曲面分割算法。但曲面展开算法和曲面分割算法处理后的曲面,在结合处不能通过网格划分算法来保证其网格结点吻合,需要作特殊处理。将结合处定义为公共边,当左边先划分时,必定在公共边上产生属于左边的网格结点,此时,将其记录下来;当划分右边时,将公共边上的属于左边的网格结点直接取出,作为右边的网格结点,这样就可保证曲面展开算法和曲面分割算法处理后的曲面在结合处网格结点完全吻合;反之亦然。经过大量实验证明,只要把曲面展开算法和曲面分割算法有机地结合起来,就能较好地实现任意曲面的三角形网格划分。
004计算机辅助设计与图形学学报1997年
立体图俯视图
图7 曲面展开算法和曲面分割算法的综合应用
参考文献
1 Sibon R .L ocally equiangular triangulati on .Comp J ,1978,21(3):243~245.
2 L aw son C L .T ransfo rm ing triangulati ons .D iscrete M ath ,1972,3:365~372.
3 F ield D A .I mp lem enting W atson ′s algo rithm in th ree di m ensi ons .In :P roc 2nd A nnual A CM sympo sium on Com 2
putati on Geom etry ,N ew Yo rk ,1986.246
~259.4 丁永祥.薄壁管挤压缩径成形过程的模拟研究:[学位论文].武汉:华中理工大学机械学院,1994.
5 Joe B .D elaunay triangular m eshes in convex p loygons .S I AM ,J Sci Stat Comput ,1986,7(2):514
~539.6 胡瑞安.计算机辅助几何设计.武汉:华中理工大学出版社,1987.
7 汪国昭.曲线曲面的离散求交方法.浙江大学学报(计算几何专辑),1984.
8 张 华.用于注塑CA E 的几何造型系统:[学位论文].武汉:华中理工大学机械学院,1995.
TR I ANG L E M ESH ING FOR SURFACE
Chen Yongfu ,Zhang H ua ,Chen X ing and L i D equn
(N ational K ey L ab of P lastic S i m u la tion &M old T echnology ,H U S T ,W uhan 430074)
Abstract T h is p ap er classifies su rfaces in to develop ab le su rface and undevelop ab le su rface .T he fo rm er can be converted in to p lane w ith su rface 2develop ing algo rithm ,w h ile the latter can be divided in to p lanes w ith su rface 2dividing algo rithm .T he D elaunay trian 2gu lar m eshes are generated on the p lane ,w here the m esh nodes can be reflected to the su rface reversely ,w h ich accom p lishes the goal of triangu lati on of su rface .
Key words D elaunay triangu lati on ,develop ab le su rface ,undevelop ab le su rface ,su rface 2develop ing algo rithm ,su rface 2dividing algo rithm .
1
045期陈永府等:任意曲面的三角形网格划分
ansys教程之自适应网格划分
ansys教程之自适应网格划分 [摘要]:ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。)通过这种误差估计,程序可以确定网格是否足够细。如果不够的话,程序将自动细化网格以减少误差。这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。 自适应网格划分的先决条件 ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。用户的模型在使用这个宏之前必须满足一些特定的条件。(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。)这些要求包括: 标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。 模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。而且单元的能量误差是受材料弹性模量影响的。因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。 模型必须使用支持误差计算的单元类型。(见表3-1) 模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。 表3-1 自适应网格划分可用单元 2-D Structural Solids PLANE2 2-D 6-Node Triangular Solid PLANE25 Axisymmetric Harmonic Solid PLANE42 2-D 4-Node Isoparametric Solid PLANE82 2-D 8-Node Solid PLANE83 Axisymmetric Harmonic 8-Node Solid
有限元网格划分的基本原则
有限元网格划分的基本原则 划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减
自适应网格
ALE adaptive mesh单元: AC1D2, AC1D3, AC2D3, AC2D4, AC2D6, AC2D8, AC3D4, AC3D6, AC3D8, AC3D10, AC3D15, AC3D20, ACAX3, ACAX4, ACAX6, ACAX8 CPS4, CPS4T, CPS3 CPE4, CPE4H, CPE4T, CPE4HT, CPE4P, CPE4PH, CPE3, CPE3H CAX4, CAX4H, CAX4T, CAX4HT, CAX4P, CAX4PH, CAX3, CAX3H C3D8, C3D8R, C3D8H, C3D8RH, C3D8T, C3D8HT, C3D8RT, C3D8RHT, C3D8P, C3D8PH, C3D8RP, C3D8RPH 从列表来看,ALE自适应网格不适用于壳(S4、S4R等),另外对于实体单元也不适用于四面体(C3D4)。 问题1: The requested number of domains cannot be created due to restrictions in domain decomposition. 措施:job---Editjob---Parallelization---Number of domains: 设为1 问题2:ALE算法和CEL算法有什么区别? 措施:①CEL只能用于explicit,AEL在implicit(声畴、冲蚀、磨损)和explicit都能用; ②ALE方法最初出现于数值模拟流体动力学问题的有限差分方法中。这种方法兼具 Lagrange方法和Euler方法二者的特长,即首先在结构边界运动的处理上它引进了 Larange方法的特点,因此能够有效的跟踪物质结构边界的运动;其次在内部网格 的划分上,它吸收了Euler的长处,即是使内部网格单元独立于物质实体而存在, 但它又不完全和Euler网格相同,网格可根据定义的参数在求解过程中适当调整 位置,使得网格不致出现严重的畸变。 CEL是欧拉-拉格朗日耦合,用于固体液体之间的耦合。 说法1:ALE是arbitary lagrange euler 算法 CEL couple lagrange euler 流固耦合的设置应该不属于算法的范畴 问题3:为什么odb转换输出坐标系后,只有S11等应力分量改变,而像Mises Equivalent 等都不变呢? 措施:①看变量情况:S11指的是沿一方向的力,改了坐标系,值也会变。 但是如果是CPRESS,接触压力的话,它是指垂直于接触面上的力,与你的坐标没有关系,这样,你改了坐标系,自己它不会变。 其它的变量如mises等同理。
ANSYS网格划分总结大全
有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材
Deform网格划分原则及方法
[原]Deform网格划分原则及方法 2009-04-04 23:48 引言:划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍网格划分时的一些基本原则及方法。 关键词: Deform 网格 局部细化 一、网格划分的原则 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。 图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。 图2是中心
ANSYS 13.0 Workbench 网格划分及操作案例
第 3章 ANSYS 13.0 Workbench网格划分及操作案例 网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。网格直接影响到求解精 度、求解收敛性和求解速度。此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。因此,一个越好的自动化网格工具,越能得到好的解决方案。 3.1 ANSYS 13.0 Workbench 网格划分概述 ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。此外,变化参数可以得到即时更新的网 格。ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。 网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。 可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。 ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFX-MESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。【Mesh】组件在项目流程图中直接与其他 Workbench分析系统集成。 3.2 ANSYS 13.0 Workbench 网格划分 ANSYS 网格划分不能单独启动,只能在 Workbench 中调用分析系统或【Mesh】组件启 动,如图 3-1 所示。 图3-1 调入分析系统及网格划分组件
ANSYS命令流学习笔记12-自适应网格及其在WB中运用的对比
!ANSYS命令流学习笔记12-自适应网格及其在WB中运用的对比 !学习重点: !1、网格收敛的重要性 由于应力集中(区别于应力奇异)的存在,在结构不连续处存在应力较大,而且随着网格质量数量的增加,应力值趋于收敛,据说收敛与否的应力差值可以很大,所以说重要细节结构的网格收敛十分重要。 !2、WorkBench中网格收敛的实现 WorkBench中在solution选项中设置网格循环次数,关键点网格优化系数,在求解结果选项下插入convergence,定义deformation或者stress的收敛系数。 计算前后的网格对比 虽然六面体网格变成四面体网格进行细分,但是初始网格划分的尺寸,对结果仍然有一定影响。而且优化的方式和APDL中也有一定差异,此例与APDL结果相同,是有一定运气成分。此处如果网格继续细化,肯定是fix处的尖角处应力奇异。(所以如何指定优化区域也是个问题) !3、APDL中网格收敛的实现 (1) 建模,注意不要划分网格,而且3D模型只能使用4面体单元网格; (2) 加载边界条件,由于没有网格,边界条件只好由面或者线确定; (3) 启动ADAPT宏命令,指定能量收敛误差,最大循环次数,网格优化系数;看起来很厉害的样子,但是使用方法和命令一样,只是输入命令框的不提示有此命令存在;. (4) 后处理查看结果。 !4、对网格收敛的一些疑问 (1) 宏命令调用:通过help文件查询到ADAPT的命令含义,但是不懂宏的内容,权且当做命令处理。 (2) ADAPT收敛误差:help中说是结构能量误差(SEPC),如果在热分析是热能量误差(TEPC),SEPC等效于应变能量误差(strain energy error )。由于APDL和WorkBench收敛准则的不同,收敛结果无法对应,不明所以。 (3) 网格划分方式:实体单元只能采用非结构化网格形式,WB和APDL都是如此,WB 即使划分了结构和单元也会无效;但是APDL和WB指定网格初始尺寸有意义?;虽说非结
ANSYS自适应网格划分
ANSYS自适应网格划分 (1) 何为网格自适应划分? ANS YS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。(误差估计在ANSYS Basic Analysis Procedures Gui第五章中讨论。)通过这种误差估计,程序可以确定网格是否足够细。如果不够的话,程序将自动细化网格以减少误差。这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值 (或直到用户指定的最大求解次数)。 自适应网格划分的先决条件 ANSYS软件中包含一个预先写好的宏,ADAPT.MAC完成自适应网格划分的功能。 用户的模型在使用这个宏之前必须满足一些特定的条件。(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。)这些要求包括: 标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。而且单元的能量误差是受材料弹性模量影响的。因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。 模型必须使用支持误差计算的单元类型。 模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。 自适应网格划分可用单元 2-D Structural Solids PLANE2 2-D 6-Node Triangular Solid PLANE25 Axisymmetric Harmonic Solid
网格划分的方法
网格划分的方法 1.矩形网格差分网格的划分方法 划分网格的原则: 1)水域边界的补偿。舍去面积与扩增面积相互抵消。2)边界上的变步长处理。 3)水、岸边界的处理。 4)根据地形条件的自动划分。 5)根据轮廓自动划分。
2.有限元三角网格的划分方法 1)最近点和稳定结构原则。 2)均布结点的网格自动划分。 3)逐渐加密方法。 35 30 25 20 15 10 5 05101520253035
距离(m)距 离 (m) 3. 有限体积网格的划分方法 1) 突变原则。 2) 主要通道边界。 3) 区域逐步加密。
距离(100m) 离距(100m )距离(100m)离距(100m )
4. 边界拟合网格的划分方法 1) 变换函数:在区域内渐变,满足拉普拉斯方程的边值问题。 ),(ηξξξP yy xx =+ ),(ηξηηQ yy xx =+ 2) 导数变化原则。 ?????? ??????=?????? ??????-ηξ1J y x ,???? ??=ηηξξy x y x J 为雅可比矩阵,??? ? ??--=-ηηξξy x y x J J 11, ξηηξy x y x J -= )22(1 222233ηηξηξηηξηξξηηηηηξξηηξξξηξy y x y y y x y y x x y y x y y x y J xx +-+-+-= 同理可得yy ξ,xx η,yy η。 变换方程为 020222=+++-=+++-)()(ηξηηξηξξηξηηξηξξγβαγβαQy Py J y y y Qx Px J x x x 其中2222,,ξξηξξηηηγβαy x y y x x y x +=+=+=。
Fluent的自适应网格问题
加密网格的话有两种参考标准一种是y+值,一种是y*值,一般来说,要加密网格主要是为了是y+值满足需求,具体的情况看楼主你的需要... 根据y+值来加密网格的步骤如下:运行fluent,导入cas and dat 文件后,点击adapt——Yplus/Ystar..。,之后出现选择界面,一般情况可以保持默认界面,当然也可以根据自己的需求选择选项,一般type项选择Yplus,然后点击compute,在min及max项会出现你的选择壁面的Y+值,在其下方,有minallowed 和maxallowed,输入你所需要的Y+值范围,点击Mark按钮,会标记出不符合要求的部分,然后点击adapt,就可以了,这部分区域的网格会加密,以适应你的要求 Y*的步骤也是这样的 但是前提是要知道你的计算的y+值范围,而这个值一般是估计值,且跟计算有关的,是个不确定量,所以一般只作参考用 希望能帮到你......另外,希望给加分啊,呵呵 追问 我点完adpat,Yplus/Ystar这个是灰的,不能点。。 回答 额,你计算了吗或者说你导入的是cas & dat 文件吗如果不是,你都没 有一个y+值的范围,怎么可能让软件给你加密网格...(这是基本条件)追问 当然计算了,我保存完再导入cas& dat也不行 回答 那你试试计算完,直接点adapt试试.....还真没遇到过你说的情况 追问 adapt都能点只是里面的Yplus/Ystar不能点,是灰色的 fluent里的常见问题(一) (2011-02-26 09:44:43) 1什么叫松弛因子松弛因子对计算结果有什么样的影响它对计算的收敛情况又有什么样的影响 1、亚松驰(Under Relaxation):所谓亚松驰就是将本层次计算结果与上一层次结果的差值作适当缩减,以避免由于差值过大而引起非线性迭代过程的发散。用通用变量来写出时,为松驰因子(Relaxation Factors)。《数值传热学-214》 2、FLUENT中的亚松驰:由于FLUENT所解方程组的非线性,我们有必要控制的变化。一般用亚松驰方法来实现控制,该方法在每一部迭代中减少了的变化量。亚松驰最简单的形式为:单元内变量等于原来的值加上亚松驰因子a 与变化的积, 分离解算器使用亚松驰来控制每一步迭代中的计算变量的更新。这就意味着使用分离解算器解的方程,包括耦合解算器所解的非耦合方程(湍流和其他标量)都会有一个相关的亚松驰因子。在FLUENT中,所有变量的默认亚松驰因子都是对大多数问题的最优值。这个值适合于很多问题,但是对于一些特殊的非线性问题(如:某些湍流或者高Rayleigh数自然对流问题),在计算开始时要慎重减小亚松驰因子。使用默认的亚松驰因子开始计算是很好的习惯。
网格中的三角形
网格中的三角形 河北张家口市第十九中学 贺峰 随着新课程的实施,在近几年的中考试卷中出现了许多新颖的网格型试题,这类试题具有很强的直观性、可操作性、开放性及综合性等特点,不仅能够考查学生的数学知识,体现分类、数形结合等重要的数学思想,同时也考查和培养学生的识图、归纳、动手操作、自主探究等多种能力,有利于培养学生的探究意识和创新精神。现以近几年中考试题中出现的“网格中的三角形”为例,为同学们加以归类分析: 一、网格中的“等面积三角形” 例1 已知在正方形网格中,每个小方格都是边长为1的正方形,A 、B 两点在小方格的顶点上,位置如图1所示,点C 也在小方格的顶点上,且以A 、B 、C 为顶点的三角形面积为1,则点C 的个数为( ) (A )3个 (B )4个 (C )5个 (D )6个 析解:此题以网格为载体来考查同学们等面积三角形的构成,体现分类讨论思想,若使点C 在小方格的顶点上,且以A 、B 、C 为顶点的三角形面积为1, 即保证△ABC 的底为2,高为1,因此须分类讨论的思想方法,即按AC =2时、BC =2时进行分类求解。答案如图2所示: 说明:此题也可通过对图形对称变换进行求解,即确定第(1)、(3)、(5)三种情况,分别以AB 所在的直线为对称轴将△ABC 翻折,使点C 落在格点上即可求解。 即可求解。 二、网格中的“等腰三角形” 例2如图3所示,A 、B 是4×5网络中的格点,网格中的每个小正方形的边长为1,请在图中清晰标出使以A 、B 、C 为顶点的三角形是等腰三角形的 所有格点C 的位置. 析解:此题以网格为载体来考查同学们等腰三角形的构成,体现分类讨论思 想,若使点C 在小方格的顶点上,且以A 、B 、C 为顶点的三角形为等腰三角形,即保证△ABC 中AB =AC 或AB =BC 或AC =AB ,即分别以AC 、AB 、BC 为腰时进行分类求解。答案如图4所示: 说明:此题也可通过对图形旋转变换进行求解,即以AB 为腰,分别以点A 、点B 为旋转中心,将线段AB 进行旋转,使点B 、点A 落在格点上即可求解。 三、网格中的“直角三角形” 例3如图5,正方形网格中,小格的顶点叫做格点,小华按下列要求作图: ①在正方形网格的三条不同实线上各取一个格点,使其中任意两点不在同一条实线 上;②连结三个格点,使之构成直角三角形, 小华在左边的正方形网格中作出了Rt △ABC ,请你按照同样的要求,在右边的两个 正方形网格中各画出一个直角三角形,并使三个网格中的直角三角形互不全等。 析解:此题开放性很强, 给学生广阔的思维空 图1 A 图3 图 4 A B C 图5 图6 C C C C C C (1) (2) (3) (5) (6) 图2
网格划分实例详细步骤
一个网格划分实例的详解 该题目条件如下图所示: Part 1:本部分将平台考虑成蓝色的虚线 1. 画左边的第一部分,有多种方案。 方法一:最简单的一种就是不用布置任何初始的2dmesh直接用one volume 画,画出来的质量相当不错。 One volume是非常简单而且强大的画法,只要是一个有一个方向可以 mapped的实体都可以用这个方法来画网格,而事实上,很多不能map的单元也都可以用这个命令来画,所以在对三维实体进行网格划分的时候,收件推荐用one volume来试下效果,如果效果不错的话,就没有必要先做二维单元后再来画。 方法二:先在其一个面上生成2D的mesh,在来利用general选项,这样的优点是可以做出很漂亮的网格。
相比之下:方法二所做出来的网格质量要比一要高。 2. 画第二段的网格,同样演示两种方法: 方法一:直接用3D>solid map>one volume 方法二:从该段图形来看,左端面实际上由3个面组成,右端面由一个部分组成,故可以先将左端面的另两个部分的面网格补齐,再用general选项来拉伸,但是,问题是左面砖红色的部分仅为3D单元,而没有可供拉伸的源面网格,故,应该先用face命令生成二维网格后,再来拉伸,其每一步的结果分见下:
在用general选项时,有个问题需要注意:在前面我们说过,source geom和elemes to drag二选一都可以,但是这里就不一样了,因为source geom选面的话,只能选择一个面,而此处是3个面,所以这里只能选elemes to drag而不能选择source geom.
有限元网格划分和收敛性
一、基本有限元网格概念 1.单元概述 几何体划分网格之前需要确定单元类型。 单元类型的选择应该根据分析类型、 形状特征、 计算数据特点、精度要求和计算的硬件条件等因素综合考虑。 为适应特殊的分析对象和边界 条件,一些问题需要采用多种单元进行组合建模。 2?单元分类 选择单元首先需要明确单元的类型,在结构中主要有以下一些单元类型: 平面应力单元、 平面应变单元、轴对称实体单元、空间实体单元、板 单元、壳单元、轴对称壳单元、杆单 元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不 同的分类方法,上述单元可以分成以 下不同的形式。 3. 按照维度进行单元分类 根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。 一维单元的网格为一条直线或者曲线。 直线表示由两个节点确定的线性单元。 曲线代表 由两个以上的节点确定的高次单元, 或者由具有确定形状的线性单元。 杆单元、梁单元和轴 对称壳单元属于一维单元,如图 1?图 3所示。 二维单元的网格是一个平面或者曲面,它没有厚度方向的尺寸。这类单元包括平面单元、 轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图 4所示。二 维单元的形状通 常具有三角形和四边形两种, 在使用自动网格剖分时, 这类单元要求的几何形状是表面模型 图1捋果詰柯与一维杆单无犠型(直豉) &2桁舉第构石一隼杆早死撲型(曲线) B3毀姑构与一纯梁单元除世(直疑和呦疚〕
或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。
洞丨伍金哉钩和潯壳社电 三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元 包括空间实体单元和厚壳单元,如图5所示。在自动网格划分时,它要求的是几何模型是实 体模型(厚壳单元是曲面也可以)。 图5三址乙勺久和父侬草无 4. 按照插值函数进行单元分类 根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次 单元和更高次的单元。 线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面。这类单元的优点是节点数量少,在精度要求不高或者结果数据梯度不太大 的情况下,采用线性单元可以得到较小的模型规模。但是由于单元位移函数是线性的,单元 着应力突变,如图6所示。 S6錢41吕节点点单无fu节庖实体羊元
有限元网格划分
有限元网格划分 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。 关键词:有限元网格划分;映射法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。 2.1 网格数量 网格数量直接影响计算精度和计算时耗,网格数量增加会提高计
算精度,但同时计算时耗也会增加。当网格数量较少时增加网格,计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。 2.2 网格密度 为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。由此反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。 2.3 单元阶次 单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。 2.4 单元形状 网格单元形状的好坏对计算精度有着很大的影响,单元形状太差的网格甚至会中止计算。单元形状评价一般有以下几个指标: (1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为参考基准。 (2)扭曲度:单元面内的扭转和面外的翘曲程度。 (3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小 2.5 单元协调性 单元协调是指单元上的力和力矩能够通过节点传递给相邻单元。为保证单元协调,必须满足的条件是: (1)一个单元的节点必须同时也是相邻点,而不应是内点或边界
第8讲 自适应网格和fluent计算数据的后处理(学生用)
FLUENT模拟中的关键问题与数据后处理以混合问题为例: 一、自定义函数(p57) 使用命令:Define>Custom Field Function 打开自定义函数设计对话框: 以定义速度水头为例: 显示自定义函数的数值分布: 使用命令:Display>Contours… 取消Filled选项,保留其它默认设置,点击Display 点击Close,结果见下图:
二、使用二阶离散化方法重新计算 为了提高计算精度,对于计算当中的变量可以在离散格式中,提高其精度:1)使用命令:Solve>Controls>Solution 在条目下,选择能量项,并选择,此时要修改相 应的能量方程的松弛因子为 0.8。 点击OK。 2)再进行200次计算: 得到的结果明显改善:
提高精度后的结果和前的结果比较 三、 自适应网格 FLUENT 设置自适应网格的目的是为了提高计算精度。 1. Display>contours…,选择温度作为显示对象; 2. 取消node values 选项,再点击display ,看到单元边界不光滑,即梯度很 大,其范围也会显示出来;
从图中可以明显的看到,单元间边界很不光滑了。为了改进梯度变化较大的区域的精度,我们必须建立梯度比较大的网格组合,以便于细分网格,提高计算精度。 3.在contours of 下拉菜单中,选择adption…和adaption function; 显示用于改进计算精度的网格图: 取消node values选项;点击display;
4.把梯度范围大于0.01的显示出来, 取消Options项下的Auto Range,设定min为0.01,把梯度大于0.01的边界节点显示出来: 如果把min设置为0.005,网格数量明显增加:
自适应网格划分
自适应网格划分 何为网格自适应划分? ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。)通过这种误差估计,程序可以确定网格是否足够细。如果不够的话,程序将自动细化网格以减少误差。这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。 自适应网格划分的先决条件 ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。用户的模型在使用这个宏之前必须满足一些特定的条件。(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。)这些要求包括: 标准的ADAPT过程只适用于单次求解的线性静力结构分析和线 性稳态热分析。 模型最好应该使用一种材料类型,因为误差计算是根据平均 结点应力进行的,在不同材料过渡位置往往不能进行计算。 而且单元的能量误差是受材料弹性模量影响的。因此,在两 个相邻单元应力连续的情况下,其能量误差也可能由于材料 特性不同而不一样。在模型中同样应该避免壳厚突变,这也 可能造成在应力平均是发生问题。 模型必须使用支持误差计算的单元类型。(见表3-1) 模型必须是可以划分网格的:即模型中不能有引起网格划分 出错的部分。 表3-1 自适应网格划分可用单元 2-D Structural Solids PLANE2 2-D 6-Node Triangular Solid PLANE25 Axisymmetric Harmonic Solid PLANE42 2-D 4-Node Isoparametric Solid PLANE82 2-D 8-Node Solid PLANE83 Axisymmetric Harmonic 8-Node Solid 3-D Structural Solids
Ansys ICEM 二维三角形结构化网格-Y Block
ICEM 二维三角形结构化网格(Y-Block) 1 三角形结构 ①构建如图1.1a所示的三角形结构(蓝)、建立如图1.1b所示的辅助线和点(红); Fig. 1.1a Generate the triangle Fig. 1.1b Create the auxiliary curves and points ②创建2D planar block,如图1.2; Fig. 1.2 Create the 2D Planar Block
③分割块(O-Grid):选择block,选择两条edge(11-13和13-21),如图1.3a,分割结果如图1.3b (a) (b) Fig. 1.3 Split the block ④映射关联点:模型树中选择Geometry →Points →Show Point Names;Blocking →Vertices →Numbers。如图1.4a;注意:vertex number和point name 随个人作图顺序不一样。 作映射: Vertex 34 →Point 08; Vertex 19 →Point 03; Vertex 21 →Point 00; Vertex 35 →Point 04; Vertex 13 →Point 02; Vertex 33 →Point 05; Vertex 11 →Point 01;
映射结果见图1.4b; (a) Show Point Names and Vertices Numbers (b) Fig. 1.4 Associate Vertex ⑤构建网格,及检查质量,如图1.5 Fig. 1.5 Meshing
ANSYS网格划分的一些例子
虽然做出来了.但是我还是有一个问题想请教大家: vsweep和mapp分网后形成网格各有什么规律?如何结合两种方法划分出整齐规则的网格呢. 比如:为什么图中的(1)部分用MAPP划分,(2)部分用SWEEP划分呢就可以出现上图中的那种整齐规则的网格?反过来(1)部分用SWEEP,(2)部分用MAPP划分就不会出现整齐规则的网格呢? 部分(1)和部分(2)不可看成一个整体划分吗? 我试了一个,如果把两个部分看成整体,可以分网但是不会出现那种整齐的网格. 只有掌握了生成网格规律才容易得到合理,整齐,规则的网格,总不能分网时把各种方法都试一遍吧. 恳请各位谈点自己的在分网方面的经验.谢谢 1的三个边如果都设了分段数则sweep和map是一样的 et,1,42 et,2,45 cyl4,,,20 lsel,all lesize,all,,,10
esize,,10 vext,1,,,,,20 aclear,all amesh,1 不过好象中间不大好的!!!还望高手指点! 命令流; et,1,42 et,2,45 blc4,,,10,5 lesize,1,,,5 lesize,2,,,10 mshape,0,2d mshkey,1 amesh,1 esize,,5 vrotat,1,,,,,,1,4 aclear,all
用map也可以,,取其四分之一,单元大小可控制!做了一个!
/PREP7 CYL4, , ,5 RECTNG,-1,1,-1,1, FLST,2,2,5,ORDE,2 FITEM,2,1 FITEM,2,-2 AOVLAP,P51X wpro,,90.000000, wpro,,,45.000000 ASBW, 3 wpro,,,-45.000000 wpro,,,-45.000000 FLST,2,2,5,ORDE,2 FITEM,2,1 FITEM,2,4 ASBW,P51X wpro,,,45.000000 wpro,,90.000000, ET,1,PLANE42 ESIZE,1,0, AMAP,6,12,9,7,8 WPSTYLE,,,,,,,,0 AMAP,7,12,10,5,8 AMAP,3,10,11,6,5 AMAP,5,6,7,9,11 AMAP,2,8,5,6,7 TYPE, 1 EXTOPT,ESIZE,10,0, EXTOPT,ACLEAR,0 EXTOPT,ATTR,0,0,0 MAT,_Z2 REAL,_Z4 ESYS,0 ET,2,SOLID45 TYPE, 2 EXTOPT,ESIZE,10,0, EXTOPT,ACLEAR,0 EXTOPT,ATTR,0,0,0 MAT,_Z2 REAL,_Z4 ESYS,0 VOFFST,2,5, , VOFFST,6,5, , VOFFST,7,5, ,
网格划分的原则
划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。 1网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。 图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。 图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b 中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减小。因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。
任意形状的三角形网格划分
第9卷 第5期 1997年9月计算机辅助设计与图形学学报J.CAD &CG V o l .9,N o.5Sep.,1997 任意曲面的三角形网格划分 陈永府 张 华 陈 兴 李德群 (华中理工大学塑性模拟及模具技术国家重点实验室 武汉 430074) 摘要 把曲面分为可展曲面和不可展曲面,对可展曲面用曲面展开算法展成平面,对不可展曲面用曲面分割算法转化成平面片,在平面上运用D elaunay 三角划分法进行网格划分,然后把网格节点反映射到曲面上,从而实现任意曲面的三角形网格划分。 关键词 D elaunay 三角划分,可展曲面,不可展曲面,曲面展开算法,曲面分割算法。 1996201203收稿,1996211222收到修改稿。本文得到“八五”重点攻关项目“注塑成形的计算机仿真与交互计算”资助。陈永府,1972年生,硕士研究生,研究方向为注塑模CA E 的前处理。张 华,博士研究生,研究方向为注塑模CA E 。陈 兴,副教授,研究方向为注塑模CAD 。李德群,博士生导师,研究方向为模具CAD 、CA E 、CAM 。 1 引 言 网格划分是计算机图形学研究的重要内容。目前,有很多种网格划分算法,如拓扑分解法、节点连接法、映射单元法、基于栅格法等。这些算法在二维网格划分上各有千秋,但对三维任意曲面的网格划分,成功的例子却很少。俄国数学家D elaunay 在1934年就证明了:对于任意给定的平面点集,有且仅有一种三解剖分方法能够满足“最大2最小角”优化准则,即所有三角形的最小内角之和最大。Sib son [1]证明了平面任意给定点集的D elauay 三角划分具有整体最优化的性质,这就是说,对于任意给定的平面点集,D elaunay 三角划分能够得到整体最优的三角形网格,能尽可能地避免病态三角形的出现。所以,D elaunay 三角划分在许多应用领域,尤其是在实体几何造型和有限元网格自动生成等研究领域,受到广泛的重视。但是传统的D elaunay 三角划分不能对三维任意曲面进行网格划分,为了解决这个问题,本文把曲面分为可展曲面和不可展曲面,分别对可展曲面采用曲面展开算法,对不可展曲面采用曲面分割算法;将曲面转化为平面,然后在平面上利用D elaunay 三角划分的优化性质进行网格划分,再将网格节点反映射到曲面上(限于篇幅,本文略去网格节点反映射到曲面上的算法),从而实现任意曲面的三角形网格划分。 2 平面任意多边形域的D elaunay 三角划分 L aw son [2]根据“最大2最小角”优化准则,通过“对角线交换”法则实现了二维给定点 集的D elaunay 三角划分。W atson [3]首次提出 “插入多边形”,并在此基础上,利用“外接__________________________________________________________https://www.360docs.net/doc/c87661948.html,