双臂并联机器人的运动控制程序设计
Electronic Technology & Software Engineering 电子技术与软件工程? 253
Program Design ?
程序设计
【关键词】双臂并联机器人 运动控制 Sysmac Studio 程序
1 绪论
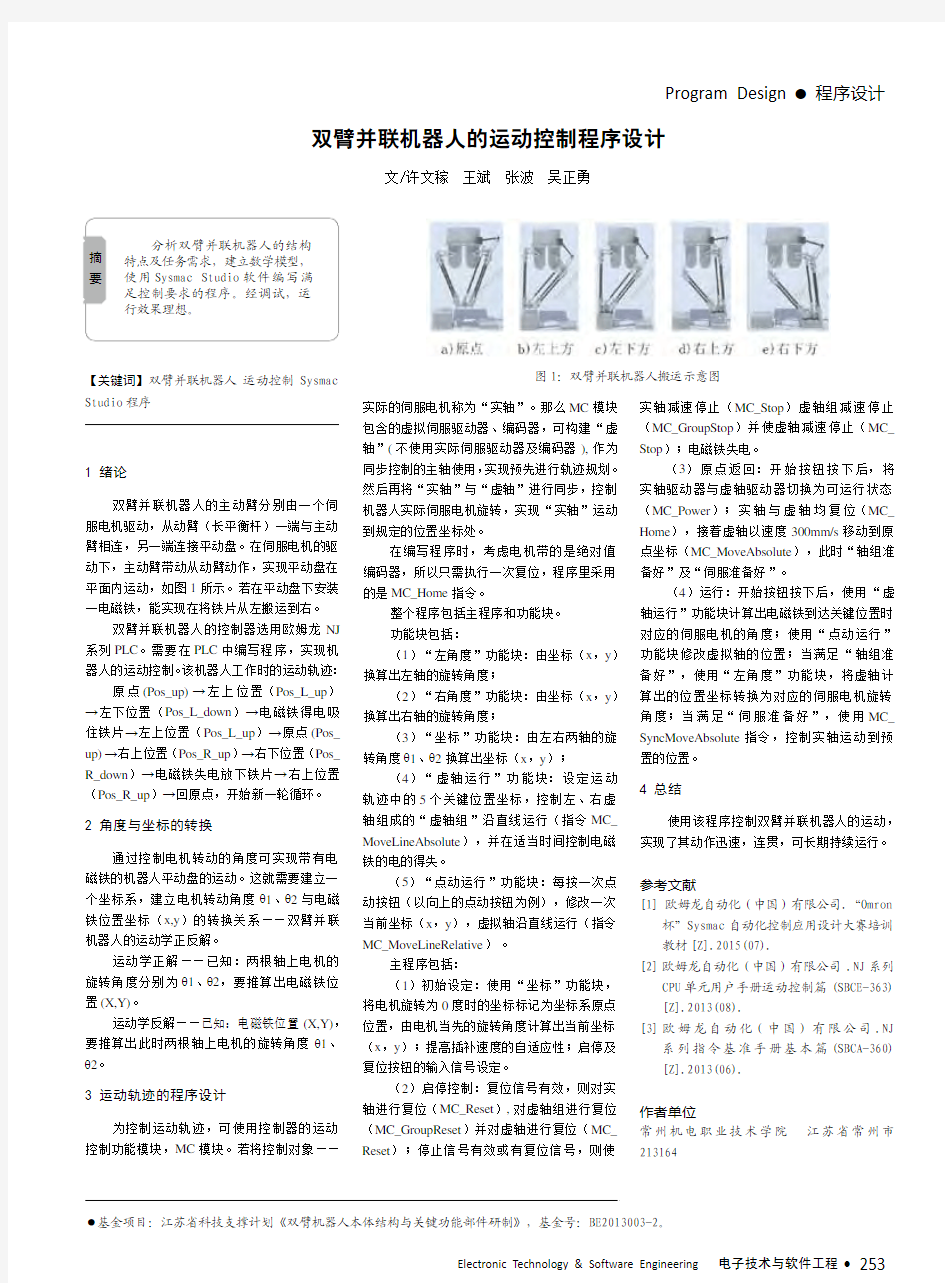
双臂并联机器人的主动臂分别由一个伺服电机驱动,从动臂(长平衡杆)一端与主动臂相连,另一端连接平动盘。在伺服电机的驱动下,主动臂带动从动臂动作,实现平动盘在平面内运动,如图1所示。若在平动盘下安装一电磁铁,能实现在将铁片从左搬运到右。
双臂并联机器人的控制器选用欧姆龙NJ 系列PLC 。需要在PLC 中编写程序,实现机器人的运动控制。该机器人工作时的运动轨迹:
原点(Pos_up)→左上位置(Pos_L_up )→左下位置(Pos_L_down )→电磁铁得电吸住铁片→左上位置(Pos_L_up )→原点(Pos_up)→右上位置(Pos_R_up )→右下位置(Pos_R_down )→电磁铁失电放下铁片→右上位置(Pos_R_up )→回原点,开始新一轮循环。
2 角度与坐标的转换
通过控制电机转动的角度可实现带有电磁铁的机器人平动盘的运动。这就需要建立一个坐标系,建立电机转动角度θ1、θ2与电磁铁位置坐标(x,y )的转换关系——双臂并联机器人的运动学正反解。
运动学正解——已知:两根轴上电机的旋转角度分别为θ1、θ2,要推算出电磁铁位置(X,Y)。
运动学反解——已知:电磁铁位置(X,Y),要推算出此时两根轴上电机的旋转角度θ1、θ2。
3 运动轨迹的程序设计
为控制运动轨迹,可使用控制器的运动控制功能模块,MC 模块。若将控制对象——
双臂并联机器人的运动控制程序设计
文/许文稼 王斌 张波 吴正勇
实际的伺服电机称为“实轴”。那么MC 模块包含的虚拟伺服驱动器、编码器,可构建“虚轴”(不使用实际伺服驱动器及编码器),作为
同步控制的主轴使用,实现预先进行轨迹规划。然后再将“实轴”与“虚轴”进行同步,控制机器人实际伺服电机旋转,实现“实轴”运动到规定的位置坐标处。
在编写程序时,考虑电机带的是绝对值编码器,所以只需执行一次复位,程序里采用的是MC_Home 指令。
整个程序包括主程序和功能块。功能块包括:
(1)“左角度”功能块:由坐标(x ,y )换算出左轴的旋转角度;
(2)“右角度”功能块:由坐标(x ,y )换算出右轴的旋转角度;
(3)“坐标”功能块:由左右两轴的旋转角度θ1、θ2换算出坐标(x ,y );
(4)“虚轴运行”功能块:设定运动轨迹中的5个关键位置坐标,控制左、右虚轴组成的“虚轴组”沿直线运行(指令MC_MoveLineAbsolute ),并在适当时间控制电磁铁的电的得失。
(5)“点动运行”功能块:每按一次点动按钮(以向上的点动按钮为例),修改一次当前坐标(x ,y ),虚拟轴沿直线运行(指令MC_MoveLineRelative ) 。
主程序包括:
(1)初始设定:使用“坐标”功能块,将电机旋转为0度时的坐标标记为坐标系原点位置,由电机当先的旋转角度计算出当前坐标(x ,y );提高插补速度的自适应性;启停及复位按钮的输入信号设定。
(2)启停控制:复位信号有效,则对实轴进行复位(MC_Reset ),对虚轴组进行复位
(MC_GroupReset )并对虚轴进行复位(MC_Reset );停止信号有效或有复位信号,则使
实轴减速停止(MC_Stop )虚轴组减速停止(MC_GroupStop )并使虚轴减速停止(MC_Stop );电磁铁失电。
(3)原点返回:开始按钮按下后,将实轴驱动器与虚轴驱动器切换为可运行状态(MC_Power );实轴与虚轴均复位(MC_Home ),接着虚轴以速度300mm/s 移动到原点坐标(MC_MoveAbsolute ),此时“轴组准备好”及“伺服准备好”。
(4)运行:开始按钮按下后,使用“虚轴运行”功能块计算出电磁铁到达关键位置时对应的伺服电机的角度;使用“点动运行”功能块修改虚拟轴的位置;当满足“轴组准备好”,使用“左角度”功能块,将虚轴计算出的位置坐标转换为对应的伺服电机旋转角度;当满足“伺服准备好”,使用MC_SyncMoveAbsolute 指令,控制实轴运动到预置的位置。
4 总结
使用该程序控制双臂并联机器人的运动,实现了其动作迅速,连贯,可长期持续运行。
参考文献
[1] 欧姆龙自动化(中国)有限公司.“Omron
杯”Sysmac 自动化控制应用设计大赛培训教材[Z].2015(07).
[2]欧姆龙自动化(中国)有限公司.NJ 系列
CPU 单元用户手册运动控制篇(SBCE-363) [Z].2013(08).
[3]欧姆龙自动化(中国)有限公司.NJ
系列指令基准手册基本篇(SBCA-360) [Z].2013(06).
作者单位
常州机电职业技术学
院 江苏省常州市 213164
●基金项目:江苏省科技支撑计划《双臂机器人本体结构与关键功能部件研制》,基金号:BE2013003-2。
图1:双臂并联机器人搬运示意图
全向移动机器人的运动控制
全向移动机器人的运动控制 作者:Xiang Li, Andreas Zell 关键词:移动机器人和自主系统,系统辨识,执行器饱和,路径跟踪控制。 摘要:本文主要关注全向移动机器人的运动控制问题。一种基于逆运动学的新的控制方法提出了输入输出线性化模型。对执行器饱和及驱动器动力学在机器人性能体现方面有重要影响,该控制法考虑到了以上两个方面并保证闭环控制系统的稳定性。这种控制算法常用于真实世界的中型组足球机器人全方位的性能体现。
1.介绍 最近,全方位轮式机器人已在移动机器人应用方面受到关注,因为全方位机器人“有一个满流动的平面,这意味着他们在每一个瞬间都可以移动,并且在任何方向都没有任何调整”。不同于非完整的机器人,例如轮式机器人,在执行之前具有旋转任何所需的翻译速度,全方位机器人具有较高的机动性并被广泛应用在动态环境下的应用,例如在中型的一年一度的足球比赛。 大多数移动机器人的运动控制方法是基于机器人的动态模型或机器人的运动学模型。动态模型直接描述力量施加于车轮和机器人运动之间的关系,以外加电压的每个轮作为输入、以机器人运动的线速度和角加速度作为输出。但动态变化所造成的变化的机器人惯性矩和机械组件的扰动使控制器设计变得较为复杂。假设没有打滑车轮发生时,传感器高精度和地面足够平坦,由于结构的简单,因而运动模型将被广泛应用于机器人的设计行为中。作为输入运动学模型是机器人车轮速度,输出机器人的线速度和角速度,机器人的执行器的动力都快足以忽略,这意味着所需的轮速度可以立即达到。然而,该驱动器的动态极限,甚至降低了机器人在真实的情况中的表现。 另一个重要方面是机器人控制的实践:执行器饱和。因机器人轮子的指挥电机速度是有饱和的界限的,执行器饱和能影响到机器人的性能,甚至使机器人运动变得不稳定。 本文提出了一个全方位的机器人的一种运动控制方法,这种控制方法是基于逆输入输出的线性的运动学模型。它需要不仅考虑到驱动器动力学的识别,但也需要考虑到执行器饱和控制器的设计,并保证闭环控制系统系统稳定性。 本文其余的部分:在2节介绍了运动学模型的一个全方位的中型足球机器人;在3节介绍了路径跟踪与定位跟踪问题基于逆运动学模型的输入输出线性化的解决方法,其中包括执行器饱和分析;4部分介绍了动态识别器及其在控制性能方面的影响;最后的实验结果和结论讨论部分分别在5和6。
并联机器人仿真运动控制的多线程实现
并联机器人仿真运动控制的多线程实现 Multithreading Realization of Simulation Motion Control of the Parallel Robot (海军工程大学)彭利坤邢继峰肖志权曾晓华 PENG, Likun XING, JifengXiao, Zhiquan Zeng, Xiaohua 摘要:现代运动模拟器对响应快速性、跟踪准确性等仿真运动特性提出了更高要求,使得并联机器人机构的运动控制更为复杂。以某型潜艇操纵模拟器为例,其控制软件采用模块化设计,利用NT环境下多线程技术,结合多媒体定时器、普通定时器,实现软件的洗出滤波、运动学反解、运动信息发送、安全保护等多任务的有机调度。在外控线程中建立网络数据接收、数据处理、液压缸控制信息发送等三个子线程,将它们从外控线程中分离出来,大大提高了数据传输和处理及运动控制的实时性和可靠性。 关键词:并联机器人;多线程;多媒体定时器;运动控制 中图分类号:TP311.1; TP391.9 文献标识码:A 文章编号: Abastract: In order to meet the demand of the emulational kinetic characteristics of modern motion simulator such as fast response and precise tracking, the control system of the parallel robot mechanism becomes more complex. As an example of submarine manipulating simulator, the modularization design and the technologies such as the multimedia timer, common timer and multithreading under NT environment etc. are adopted in the control system programing, which realize the multitask scheduling of washout filter, inverse kinematics solution, sending control data and safeguarding. By separating three sub-threadings, the Ethernet data acquisition, the data processing and the hydraulic cylinder control information sending, from the external control threading, the real time performance and reliability of the data transmitting, processing and motion control can be improved. Key words:parallel robot; multithreading; multimedia timer; motion control 1 引言 飞机、舰船、赛车、列车等运动模拟器系统,是以Stewart平台为原型的并联机器人机构最重要的应用方向,它们一般构成分布式半实物仿真系统。以某型潜艇操纵模拟器为例,整个模拟系统由教练控制台、模拟潜望镜、舱段操艇装置、六自由度(6DOF)并联机器人机构等四个分系统构成,几个分系统通过以太网传输交换数据。其中液压6DOF并联机器人为模拟潜艇空间运动的关键机构,其控制软件必须完成潜艇姿态数据的接收、处理、控制执行器(一般为液压缸)动作、实时动态显示分析等繁杂的任务。这种多任务的软件开发,基于过程的编程设计已显得力不从心,而面向对象的多线程编程因其具有接口能力强、并行处理、运用灵活等优点,成为设计本控制软件的首选。 2 控制模块 该控制软件包括洗出滤波算法、运动学反解、内控、自检、外控、逻辑控制、安全保护、平台起停、实时动态显示、正解监控、网络通讯等多个控制模块。 2.1 洗出滤波算法 虽然各种运动模拟器模拟运动的侧重点有所不同,但洗出滤波总是需要的。在模拟运动过程中,液压缸的行程有限,故在一次动作完成后,必须换向回到中性位置,以使下一个运动模拟有足够的行程,通常将这种回到中性位置的附加运动称为运动的洗出。通过运动学仿真、质心坐标转换等计算过程,而得到被仿真设备的速度、加速度,再通过高、低通滤波器滤波、积分等一系列算法转化为运动平台的线位移和角位移的过程称为运动的滤波。经典的 彭利坤:博士研究生 基金项目:军队研制基金资助项目(JXB-2004-21)
并联机器人技术方案
并联机器人方案 一、并联机器人用途: 并联机器人作为一种新型的机器人形式得到了越来越多的应用,与串联机器人相比该型机器人具有结构简单、刚度大、承载能力强、误差小等特点,与串联机器人形成了良好的互补关系。可用于六自由度数控加工中心、航天器对接机构、汽车装配线、运动模拟器、岩土挖掘、光学调整、医疗机械等领域。 二、系统特点: 1、机构采用并联式结构,按工业标准要求设计,结构简单、速度快; 2、控制系统采用Windows系列操作系统,二次开发方便、快捷,适于教学实验; 3、提供教材、实验指导书等,内容涵盖机器人运动学、动力学、控制系统的设计、机器人轨迹规划等。 三、系统配置: 1、机器人本体、控制柜、电机控制卡、控制软件、理论教材及实验指导书。附属件配置有钻铣刀头、电主轴、绘图笔架、加工平台、手动夹具,另赠送一套加工所需原材料。 2、并联机器人加工装置(用电主轴本体、夹持器及钻铣刀)。 3、绘图装置(绘图笔架及绘图笔)。 4、并联机器人加工平台及工件夹持装置。 5、部分加工演示原材料(石蜡、尼龙等)。
1.并联机器人系统照片 2.并联机器人技术参数: 3.机器人型号:RBT-6T01P(全步进电机驱动) 机器人报价:175000.00元机器人型号:RBT-6S01P(全伺服电机驱动) 机器人报价:195000.00元
1.并联机器人系统照片 2.并联机器人技术参数: 3.机器人型号:RBT-6T02P(全步进电机驱动) 机器人报价:155000.00元机器人型号:RBT-6S02P(全伺服电机驱动) 机器人报价:175000.00元
六自由度桌面型并联机器人 1.并联机器人系统图片 2.并联机器人技术参数 3.机器人型号:RBT-6T03P(全步进电机驱动) 机器人报价:135000.00元机器人型号:RBT-6S03P(全伺服电机驱动) 机器人报价:155000.00元
关于六自由度并联机器人运动控制系统的结构设计
关于六自由度并联机器人运动控制系统的结构设计 运动控制系统作为六自由度并联机器人的关键控制系统,对机器人的精准快速运动具有至关重要的作用。通过对六自由度并联机器人结构、内部控制结构及其工作原理的介绍,提出运动控制系统的设计思路,并对其中的关键技术问题进行了深入分析,对提高六自由度并联机器人的研发和应用水平具有积极的推动作用。 标签:六自由度;并联机器人;运动控制系统;结构分析 近年来,随着计算机和电子信息技术的进步,机器人运动控制技术取得了突破性发展,机器人运动控制技术是将控制传感器、电机、传动机和驱动器等组合在一起,通过一定的编程设置对电机在速度、位移、加速度等方面的控制,使起机器人按照预定的轨迹和运动参数进行运动的一种高科技技术。伴随着机械工业自动化技术的发展,运动控制技术经过了由低级到高级,由模拟到数字,再到网络控制技术的发展演进过程。运动控制技术作为机械工业自动化的一项重要技术,主要包括全封闭伺服交流技术,直线式电机驱动技术、基于编程基础上的运动控制技术、基于运动控制卡的控制技术等。其中,基于运动控制卡的控制技术通过内部各种线路的集成组合,可以实现对各种复杂的运动进行控制,该技术系统驱动程序主要包括:运动控制软件、网络动态链接数据库、运动控制参数库等子系统。运动控制卡控制技术的出现和发展有效的满足了工业机械行业数控系统的柔性化、标准化要求,在工业自动化领域的应用越来越广泛。 1 六自由度并联机器人的构造 六自由度并联机器人作为现代工业自动化技术发展的代表,主要结构包括床身、连杆和运动平台等几个部分。其中运动平台与六个连杆相联接,每个连杆各自联接一个由虎克材料制成的滑块,这些滑块又与滚珠丝杠相连,在电机的驱动下可以带动滑块沿滚珠运动,进而带动连杆有规则的运动,从而改变平台的运动方向。通过在运动平台上安装不同的机械,可以有效满足不同工作的需求。在六根连杆工作程序中,每根连杆都由一台电机进行控制驱动来保证连杆运动的独立性,因此,可以实现六自由度的机器控制运动。 2 六自由度并联机器人运动控制系统工作原理与结构设计 2.1 并联机器人运动控制系统的工作原理 六自由度并联机器人运动控制系统主要由工控机、运动控制卡、伺服放大器、资料数据收集处理平台等系统组成。在机器人工作过程中,工控机借助一定的程序指令对运动控制卡发出命令,运动控制卡将六路脉冲同时发向六套伺服放大器,在脉冲命令的指引下,这些放大器做出进一步运动,进而带动机器人平台进行运动。同时,伺服放大器将运动中形成的信号数据传回到运动控制卡,进而完成一个全闭环式反馈控制运动。在运动过程中,可以通过Lab系统对并联机器人
精密并联机器人控制算法及控制系统研究概要
第40卷第4期2004年4月 机械工程学报 V01.40No.4CHINESEJOURNAL0F MECHANICAL ENGINEERING Apr. 2004 精密并联机器人控制算法及控制系统研究木 张秀峰孙立宁 (哈尔滨工业大学机器人研究所哈尔滨 150001) 摘要:首次把数字PID算法应用到面向光纤作业的精密并联机器人控制中,介绍了这种高速、高精度小型并联机构控制系统的新控制算法及系统研究情况。另外控制系统采用了DSP新技术,解决了并联机构运动学逆解的实时在线计算问题,使系统运行更加稳定。试验结果表明这种新算法在小型精密并联机构控制系统中,完全可以满足光纤对接等作业的高技术要求,同时也为同类高精度、大行程小型定位系统的控制与设计提供了一种新的实用方 法。 关键词:并联机构运动学逆解PID控制算法中图分类号:TP24 0前言
在高速、高精度、大行程小型并联机器人控制领域,所知文献介绍的实用控制算法还未见到。在实际工程控制中PID控制算法不需要系统确切的数学模型,参数易调整,且具有很强的灵活性、适应性,其中数字PID控制算法在计算机上易修正,比模拟PID控制器性能更加完善。首次将数字PID控制算法引进到高精度并联机构的控制中,并借助高速数字信号处理器DSP解决了逆解的在线计算问 题,试验结果表明可以满足高速、高精度等技术要 求。另外还介绍了系统的组成、性能、技术指标及一些关键参数的调整方法和经验公式,为小型精密定位系统的设计与控制提供了有价值的借鉴。1 PID控制算法 1.1模拟PID控制器 所谓PID控制器是指把偏差按比例、积分和微分进行的控制器,其中模拟PID控制器是用硬件来 实现的。设l,为系统给定,Y为系统输出,萨砷 为系统偏差,u为系统控制规律…¨,则 “=K,[P+寺J::酣r+%詈]+“。 式中 K,——比例系数正——积分常数毛——微分常数 =三——偏差微分 df 在控制过程中系统有偏差产生,调节器产生控制作用使偏差不断减小,这种控制作用的强弱取决
并联机器人构型方法 (1)
机器人机构设计中最重要的步骤之一是解决机构型综合的问题,机器人机构构型方法的研究具有十分重要的理论和实际意义,尤其是并联机器人的型综合方法一直以来都受到国内外许多研究学者的关注。在并联机器人机构的构型理论研究中,基于机构末端运动特征描述与机构需要完成的功能的简单有效的构型方法还缺乏系统的研究。 并联机器人机构构型方法研究 8 多自由度机构,其构型综合是一个非常具有挑战性的难题。目前国内外主要有 5 种并联机构的型综合研 究方法,即:基于机构的结构公式的构型方法、基于螺旋理论的综合方法、基于群论和微分几何的综合 方法、基于单开链的型综合方法以及基于集合的综合方法。 1-3-1 基于机构的结构公式的构型方法 基于机构的结构公式(即自由度计算公式)的构型方法是比较传统的一种并联机构的型综合方法。 Tsai [84] 在1999 年用基于计算自由度的Grübler-Kutzbach 公式的列举法综合了一类三自由度并联机构。 基于并联机构自由度计算的一般Grübler-Kutzbach 公式为 ( ) 1 1 = = ??+ ∑ g i i M d n g f (1.1) 式中M 为机构的自由度数; d 为机构的阶; n 为机构的杆件数(包括机架); g 为运动副数; i f 为第i 个运动副的自由度数。 当给定机构的自由度数M 后,根据(1.1)寻求机构的每个分支运动链的运动副数。并联机构属于空 间多环机构,其独立环路数l 可以由下式给出 l = g ?n +1 (1.2) 该式即为著名的欧拉环路公式。将上式带入(1.1)中,可得到 =1 ∑= + g i i
f M d l (1.3) 定义并联机构中第j 个分支总的自由度数为 j C ,则有下式成立 =1 =1 ∑=∑ mg j i j i C f (1.4) 将(1.4)代入(1.3)消去 i f 后得到 ∑= + m j j C M d l (1.5) 对于分支运动链结构相同,且分支数等于机构自由度数的对称并联机构,又有以下条件成立m = M且l = M ?1 (1.6) 把(1.6)代入(1.5)消去l 后得到 = ?+1 j d C d M (1.7) 由上式在已知d 和M 时,可以得到分支运动链的自由度数 j C ,从而给出分支运动链。例如,d =3, M =3时,由式(1.7)可得 j C =3,分支运动链可以是RRR、RPR、PRR 等。并联机器人机构构型方法研究 1 0 寻找可以生成{ } gi L 的分支运动链,此时可利用位移子群乘法运算的封闭性获得不同结构的分支。 Hervé和Angeles 等较早将李群理论引入并联机构型综合。1978 年,Hervé [113] 基于位移群的代数结 构对运动链进行了分类,证明了所有六种低副所生成的运动都是位移子群,还给出了另外六种位移子群 以及子群间交集的运算法则,奠定了位移子群以及子群间交集的运算法则和位移子群综合法的理论基
平面并联机器人的运动学和动力学研究
平面2自由度并联机器人的运动学 和动力学研究 林协源1刘冠峰1 (1.广东工业大学广州) 摘要:本文面向高速高精LED电子封装设备设计了一种高速高精2自由度平面并联机构(2-PPa并联机器人)。该机构由一个动平台和两个对称分布的完全相同的支链组成,每个支链中都有一个移动副(驱动关节)和一个由平面平行四边形组成的特殊转动动副。首先推导出该机器人的运动学模型包括正反解;其次结合焊线机实际工艺要求提出多项机构性能指标对该机构的几何参数进行多目标优化;然后基于Euler-Lagrange 方程建立该机器人的动力学方程,最后通过算例分析两个移动副在动平台按照一定轨迹运动时其速度、加速度和驱动力的变化规律。这些为接下来研究该机器人的动态性能和系统解耦控制等都具有重要意义。 关键词:2自由度平面并联机器人运动学动力学 Kinematic and Dynamic Analysis of a Planar Two-degree-freedom Parallel Manipulator LIN Xieyuan1LIU Guanfeng1 (1.Guangdong University of Technology Guangzhou ) Abstract:In this paper,a type of planar 2-DOF parallel manipulator is proposed for uses in design of high- speed and high-accuracy LED packaging machines. The manipulator consists of a moving platform and two identical subchains. Each subchain is made of a prismatic joint (actuator) and a parallelogram with four passive revolute joints. We first derive the kinematic model of the manipulator. Then, we determine the optimal geometric parameters of the manipulator by solving a multi-goal optimization problem based on performance indices. We compute the dynamic equation use Euler-Lagrange formulation and use it to analyze the relationship between velocity, acceleration and driving torque of joints. This analysis is important for further study of the dynamic performance and the decoupling control methods for the manipulator. Key words:2-DOF Planar parallel manipulator Kinematics Dynamics 0 前言 在电子、包装和食品等轻工业场合中,机器人只需要3到4个自由度即可满足使用要求。串联机器人由于自身具有较大的质量和惯性,很难应用到需要高速高负载能力的场合。并联机器人很好的弥补了串联机器人这方面的不足。所以,近年来少自由度并联机器人的研究相当热门。其中3自由度并联机器人的研究已是相当深入[1-4]。在Z方向只需要较小的操作位移时,末端搭载一个1或2自由度的串联机构的2自由度并联机器人相对应3或4自由度的并联机器人会显得更加经济适用。 清华大学曽提出过两种平面2-DOF并联机器人:一种是PRRRP(P表示移动副,R 表示转动副)并联机器人,其中两移动副运动方向平行,且机器人的末端姿态是可变的[5];一种是2-PPa(Pa表示平行四边形机构)并联机器人,同样,该机器人的移动副运动方向也平行,不过其末端姿态不可变[6]。文章[6]中的并联机器人最后应用在了立式机床上。同样的2-PPa并联机器人,上海交通大学将其应用在高速高精度的场合
机器人运动控制器
TB04-2372.jtdc-1 机器人控制标准包 机器人运动控制器 我们在机器人控制上拥有丰富的经验。除了标量机器人和2维并行机构的机器人是做为选项。其他机械机构的机器人我们提供了特殊控制技术。链接型和并行机构的机器人可以像自动机械一样运行。■优点 ◆有效运用于内部研发能够短期内使自己研发的产品稳定动作。 ◆追求独特的技术能够用于研发特殊组装和动作的机器人,并投入生产现场。◆技术知识保密自己开发技术知识的保密 ◆应用于自动机械可以应用于加工机械以及装配机械之类的生产机械的操作和运转 ■机构变换 ◆直交系列机器人◆标量机器人◆2维并行机构机器人◆垂直多关节机器人◆6维并行机构机器人 〈标准〉〈选项〉〈选项〉〈独特〉〈独特〉 ■正确的轮廓控制■按控制周期变换机构■正确的轨迹 按控制周期执行机构变换,实现插补之间的接合部的圆滑轨迹控制。可应用于精密加工。 ■运行程序(技术语言?G语言) 像去除加工毛刺及钻孔机械,使用输出CAM的G语言文件来实现DNC运行。 ■拥有丰富技能对应实际生产中的作业 通过可选项,能够用于搬运,加工,熔接,去除毛刺,装配等生产机械的操作和运行。◆可选项机能例 宏机能,多任务,扭矩指令(贴接?控制力度)DNC运行触摸屏 插补前的加减速S字加减速手动脉冲发动器,高精度制动开关(接触开关)接线?法线控制 同频同步平行轴控制■触摸屏及专用PC软件 ■触摸屏例 ■专用PC画面例 使用触摸屏或PC也可以操作。■动作机构计算的可2次开发 我们的经验可以对应您的特殊需求。 另外,你也可以自行开发动作机构变换软件。■应用于机器人控制的运动控制器◆SLM4000机器人规格 单板独立单机工作4轴脉冲列输入32 输出32RS232/USB ◆PLMC40机器人规格PLC动作 4轴脉冲列输入16输出16RS232可使用通用PLC扩展(梯形 ?IO? 模拟等) ◆PLMC-MⅡEX机器人规格MECHATROLINK-Ⅱ 标准4/9/16轴最大30轴可使用通用PLC扩展(梯形?IO?模拟等) ◆多軸运动功率放大器机器人规格多轴伺服功放一体型最大7轴输入42输出42可节省配线节省成本 A B a1 a2a3Accurate contour Uncontrolled path by simple positioning Calculation at each sampling time
并联机器人设计论文设计
并联机器人设计论文 摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。 关键词:三自由度并联机构;并联机器人;设计;
1.课题国外现状及研究的主要成果 少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。在Hunt之后,不断有学者提出新的少自由度并联机构机型。在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。在Tricept并联机床上采用的构型是由Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个副驱动支链并由导向装置约束动平台。Tsai通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。Rasim Alizade于2004年提出基于平台类型和联接平台的形式和类型进行分类的一种并联机构的结构综合和分类的新方法和公式,并综合出具有单平台和多平台的纯并联和串并联复联机构.我国燕山大学的黄真教授及其团队除了研制出解耦微型6维力传感器和微动机械,设计出一种新的
智能机器人运动控制和目标跟踪
XXXX大学 《智能机器人》结课论文 移动机器人对运动目标的检测跟踪方法 学院(系): 专业班级: 学生学号: 学生姓名: 成绩:
目录 摘要 (1) 0、引言 (1) 1、运动目标检测方法 (1) 1.1 运动目标图像HSI差值模型 (1) 1.2 运动目标的自适应分割与提取 (2) 2 运动目标的预测跟踪控制 (3) 2.1 运动目标的定位 (3) 2.2 运动目标的运动轨迹估计 (4) 2.3 移动机器人运动控制策略 (6) 3 结束语 (6) 参考文献 (7)
一种移动机器人对运动目标的检测跟踪方法 摘要:从序列图像中有效地自动提取运动目标区域和跟踪运动目标是自主机器人运动控制的研究热点之一。给出了连续图像帧差分和二次帧差分改进的图像HIS 差分模型,采用自适应运动目标区域检测、自适应阴影部分分割和噪声消除算法,对无背景图像条件下自动提取运动目标区域。定义了一些运动目标的特征分析和计算 ,通过特征匹配识别所需跟踪目标的区域。采用 Kalrnan 预报器对运动目标状态的一步预测估计和两步增量式跟踪算法,能快速平滑地实现移动机器人对运动目标的跟踪驱动控制。实验结果表明该方法有效。 关键词:改进的HIS 差分模型;Kahnan 滤波器;增量式跟踪控制策略。 0、引言 运动目标检测和跟踪是机器人研究应用及智能视频监控中的重要关键技术 ,一直是备受关注的研究热点之一。在运动目标检测算法中常用方法有光流场法和图像差分法。由于光流场法的计算量大,不适合于实时性的要求。对背景图像的帧问差分法对环境变化有较强的适应性和运算简单方便的特点,但帧问差分不能提出完整的运动目标,且场景中会出现大量噪声,如光线的强弱、运动目标的阴影等。 为此文中对移动机器人的运动目标检测和跟踪中的一些关键技术进行了研究,通过对传统帧间差分的改进,引入 HSI 差值模型、图像序列的连续差分运算、自适应分割算法、自适应阴影部分分割算法和图像形态学方法消除噪声斑点,在无背景图像条件下自动提取运动 目标区域。采用 Kalman 滤波器对跟踪目标的运动轨迹进行预测,建立移动机器人跟踪运动 目标的两步增量式跟踪控制策略,实现对目标的准确检测和平滑跟踪控制。实验结果表明该算法有效。 1、运动目标检测方法 接近人跟对颜色感知的色调、饱和度和亮度属性 (H ,S ,I )模型更适合于图像识别处理。因此,文中引入改进 型 HSI 帧差模型。 1.1 运动目标图像HSI 差值模型 设移动机器人在某一位置采得的连续三帧图像序列 ()y x k ,f 1-,()y x f k ,,()y x f k ,1+
并联机器人操作细则
运动控制开发平台操作细则: 一、步进电机平台 1.上电计算机电源、驱动器电源、端子板电源。 2.运行GTCmdPCI_CH。 3.在菜单栏选择出现“基础参数设置”界面。 4.在“运控卡型号选择”栏,打开下拉菜单,选择所安装的运控卡型号。 设置“行程开关触发电平” 设置“编码器方向”,默认值0 设置控制周期,运控卡缺省的控制周期是200 μs。 5.点击“打开运控卡”按钮。 6.点击“确定”按钮。 7.在GTCmdISA_CH主菜单下选择打开“基于轴的控制”界面。 8.打开轴选下拉菜单,如下图,选择当前轴(操作轴)。 9.选择“清状态”,如右图,清除当前轴不正确的状态。 10、设置控制输出,驱动使能(轴开启) 在系统初始化完成后,在轴选框选择当前轴,按照根据系统要求设定控制输出。注意应与当 前轴的驱动器和电机的设置相统一。 SV卡: 可以选择输出模拟量,即0; 亦可选择输出脉冲量,即1。 SV卡: 选择“伺服打开/伺服关闭”选项(如右图,打勾为打开,不选为关闭)。此时驱动器使能,轴应该静止状态
11.点击“位置清零”按钮,观察“轴当前位置”为0。 4.在“运动控制模式”栏设置运动参数 5.点击“参数更新”按钮, 二、直流伺服电机平台 1~6步同步进电机一样 7、在轴的控制窗口中选中第4轴。 8、在“伺服滤波器参数设置”框中设置“比例增益”为10。 9、在梯形曲线页中“目标位置”为300000,“速度”为10,“加速度”为1。 10、点击“伺服打开”(SV卡时)/“轴开启”(SG卡时)选项,使控制器的第4轴进入伺服(开启)状态。 11、点击“清状态”键,使控制器的第四轴事件状态清除。 12、点击“参数更新”键,使第四轴开始运动 补充: 1、当某个轴选定并打开伺服后,在开发面板上会亮起相应的灯,分别是ENA1、ENA 2、ENA 3、ENA4. 2、在运动启动前应保证在控制软件的右侧的轴系状态或者坐标系状态正确,如:
并联机器人发展概述
并联机器人发展概述 随着先进制造技术的发展,并联机器人已从简单的上下料装置发展成数字化制造中的重要单元。在查阅了大量国内外相关文献的基础上,介绍了并联机器人的特点、分类、应用,从运动学、动力学、控制策略三方面总结了近年来并联机器人的主要研究成果,并指出面临的问题。 1895年,数学家Cauchy研究一种“用关节连接的八面体”,开始人类历史上并联机器的研究。1938年Pollard提出采用并联机构来给汽车喷漆。1949年Caough提出用一种并联机构的机器检测轮胎,这是真正得到运用的并联机构。而并联结构的提出和应用研究则开始于70年代。1965年,德国人Stewart发明了六自由度并联机构,并作为飞行模拟器用于训练飞行员。1978年澳大利亚人Hunttichu把六自由度的Stewart平台机构作为机器人机构,自此,并联机器人技术得到了广泛推广。 自工业机器人问世以来,采用串联机构的机器人占主导位置。串联机器人具有结构简单、操作空间大,因而获得广泛应用。由于串联机器人自身的限制,研究人员逐渐把研究方向转向并联机器人。和串联机器人相比并联结构其末端件上同时由6根杆支撑,与串联的悬臂梁相比刚度大,结构稳定。由于刚度大,并联结构较串联结构在相同的自重或体积下,有高的多的承载能力大。串联机构末端件上的误差是各个关节误差的积累和放大,因而误差大、精度低,并联式则没有那样的误差积累和放大关系,微动精度高。串联机器人的驱动电机及传动系统大都放在运动着的大小臂上,增加了系统的惯量,恶化了动力性能,而并联机器人将电机置于机座上,减小了运动负荷。在位置求解上,串联机构正解容易,但反解困难。而并联机构正解困难,反解非常容易,而机器人在线实时计算是要计算反解的。 根据并联机器人的自由度数,可以分为:2自由度并联机构。2自由度并联机构,如5-R,3-R-2-P(R表示旋转,P表示平移)。平面5杆机构是最典型的2自由度并联机构,这类机构一般具有2个平移自由度。3自由度并联机构。3自由度并联机构种类较多,形式复杂,一般有以下形式,平面3自由度并联机构,如3-RRP机构、3-RPR机构、它们具有2个旋转自由度和1个平移自由度;3维纯平移机构,如Star Like并联机构、Tsai 并联机构,该类机构的运动学正反解都很简单,是一种应用很广泛的3维平移空间机构;空间3自由度并联机构,如典型的3-RPS机构、这类机构属于欠秩机构,在工作空间不同的点,其运动形式不同是其最显著的特点,由于这种特殊的运动特性,阻碍了该类机构在实际的广泛应用;4自由度并联机构。4自由度并联机构大多不是完全的并联机构,如2-UPS-1-RRRR机构,运动平台通过3个支链与顶平台相连,有2个运动链是相同的,各具有一个虎克铰U,1个平移副P,其中P和1个R是驱动副,因此这种机构不是完全并联机构。5自由度并联机构。现有的5自由度并联机构结构复杂,如韩国的Lee的5自由度并联机构具有双层结构。6自由度并联机构。该类并联机器人是国内外学者研究的最多的并联机构,一般情况下,该类机构具有6个运动链。随着6自由度并联机构研
机器人的运动控制
2.4 手臂的控制 2.4.1 运动控制 对于机器人手臂的运动来说,人们通常关注末端的运动,而末端运动乃是由各个关节的运动合成实现的。因而必须考虑手臂末端的位置、姿态与各个关节位移之间的关系。此外,手臂运动,不仅仅涉及末端从某个位置向另外一个位置的移动,有时也希望它能沿着特定的空间路径进行移动。为此,不仅要考虑手臂末端的位置,而且还必须顾及它的速度和加速度。若再进一步从控制的观点来看,机器人手臂是一个复杂的多变量非线性系统,各关节之间存在耦合,为了完成高精度运动,必须对相互的影响进行补偿。 1.关节伺服和作业坐标伺服 现在来研究n个自由度的手臂,设关节位移以n i个关节的位移,刚性臂的关节位移和末端位置、姿态之间的关系以下式给出: (1) m维末端向量,当它表示三维空间内的位置姿态 时,m=6。如式(1)所示,对刚性臂来说,由于各关节的位移完全决定了手臂末端的位置姿态,故如欲控制手臂运动,只要控制各关节的运动即可。 设刚性臂的运动方程式如下所示: (2) 量为粘性摩擦系数矩阵;表示重力项的向量; 机器人手臂的驱动装置是一个为了跟踪目标值对手臂当前运动状态进行反馈构成的伺服系统。无论何种伺服系统结构,控制装置的功能都是检测各关节的 1给出了控制系统的构成示意图。来自示教、数值数据或外传感器的信号等构成了作业指令,控制系统根据这些指令,在目标轨迹生成部分产生伺服系统需要的目标值。伺服系统的构成方法因目标值的选取方法的不同而异,大体上可以分为关节伺服和作业坐标伺服两种。当目标值为速度、加速度量纲时,分别称之为速度控制或加速度控制,关于这些将在本节2.和3.中加以叙述。
图1 刚性臂控制系统的构成 1) 关节伺服控制 讨论以各关节位移的形式给定手臂运动目标值的情况。 令关节的目标值为12(,,,)T n d d d dn q q q q =∈?。图2给出了关节伺服的构成。若目标值是以关节位移的形式给出的,那么如图2所示,各个关节可以独立构成伺服系统,因此问题就变得十分简单。目标值d q 可以根据末端目标值d r 由式(1)的反函数,即逆运动学(inverse kinematics )的计算得出 1()d r d q f r -= (3) 图2 关节伺服构成举例 如果是工业机器人经常采用的示教方法,那么示教者实际上都是一面看着手臂末端,一面进行示教的,所以不必进行式(3)的计算,d q 是直接给出的。如果想让手臂静止于某个点,只要对d q 取定值即可,当欲使手臂从某个点向另一个点逐渐移动,或者使之沿某一轨迹运动时,则必须按时间的变化使d q
Delta并联机器人系统总体设计
摘要 近些年,delta机器人越来越得到大多数人的关注,并逐渐开始在工业上得到成熟的应用。与串联机器人相比,并联机器人有很大优势。其中之一就是可以把电机固定在基座上,这样就可以减轻机器机构上的重量。当需要直接驱动时,把电机固定在基座上是一个必要的田间。因此,并联机器人非常适合直接驱动的情况。并联机器人的另一个优点就是他的刚度很高,这些特征可以得到更多的精准度和更快的操作。Delta机器人是其中非常重要的一种。 在本书中,介绍了并联机器人的产生特点及应用。计算了机器人的自由度,位置正反解,并分析了它的空间奇异形位。还通过分析比较几种控制器和方案,选择其中最适合的方案。并设计了delta机器人的控制电路,并详细介绍它的控制器功能。 关键词:并联机构位置反解步进电机结构设计
燕山大学本科生毕业设计(论文) Abstract In recent years ,increased interest in parallel robots has been observed..Parallel robots possess a number of advantages when compored to serial arms, The most importantone is certainly the possibility to keep the motors fixed into the base ,thus allowing a large reduction of the robot structure’s active mobile mass.keeping the motors on the robot base is a requairment when direct-drive is used ,thus ,parallel robots are well suited to direct-drive actuation.Another advantage of parallel robots is their high rigiditg.these features allow more precise and much faster mani pulations. The delta parallel robot is very famous among them. In this paper,the historyapplication character of the parallel robots are introduced .And I compted the degree of free of the parallel robot,analysis the singular position. The position solution and position inverse solution too. At last, there are several methords of controlling. And I choice one of then which is better suited to this robot. This method will be introduced latter. Key word:parallel delta, position inverse solution , singular position
并联机器人文献综述
并联机器人文献综述 1、引言 人类千百年来对器械自动化的追求,促使了机器人的产生和发展。自从 1961 年美国推出第一台工业机器人以来,机器人得到了迅速的发展。广泛应用于工业各部门以及服务、医疗、卫生、娱乐等许多方面,对人类的生活产生了深远的影响。现代所说的机器人多指工业机器人,大都是由基座、腰部(肩部)、大臂、小臂、腕部和手部构成,大臂小臂以串联形式连接,因而也称为串联机器人,目前关于机器人的研究大部分集中于这一领域。就在串联机器人蓬勃发展的时候,又出现了一类全新的机器人——并联机器人。它作为串联式机器人强有力的补充,扩大了整个机器人的应用范围,引起机器人学理论界和工程界的广泛关注,成为机器人研究的主要研究热点之一。 并联机器人作为一种全新的机器人,它具有刚度大、承载能力强、误差小、精度高、动力性能好等一系列优点,并联六自由度机器人在许多行业有着非常好的应用前景,其特殊结构给机器人带来许多其它机器人不具备的优点。并联机器人是一种闭环机构,导致了其运动学和工作空间分析较为困难,同时也让机器人的精确控制变得特别困难。机器人运动时每个液压缸上分配的负载是变化的,因此每个液压伺服回路的受力、频率等系统参数也是变化的,常用的控制算法很难实现系统的精确控制。因此,对并联机器人的理论控制的研究对并联机器人的控制精度和应用推广有着重要的意义。 2、国内研究现状 最近几十年,国内外学者对并联机器人的特点、机构学、运动学方面进行了广泛、深入的研究,并且对这方面取得的成果进行了详细的概括和总结。但是,并联机器人作为一个结构复杂、多变量、多自由度、多参数耦合的非线性系统,其控制策略、控制方法的研究极其复杂。最初设计控制系统时,大多把并联机器人的各个分支当作完全独立的系统来进行控制,控制策略为传统的PID控制,控制效果很不理想。随着控制理论的发展,新的控制方法不断涌现,如智能控制"鲁棒控制"自适应控制等,并联机器人的控制也得到了迅速发展。 并联机器人作为一种结构复杂、多变量、多自由度、多参数耦合的非线性系
并联机器人发展现状与展望
并联机器人发展现状与展望 引言 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。本文根据掌握的大量并联机器人文献,对其分类和应用做了简要分析和概括,并对其在运动学、动力学、机构性能分析等方面的主要研究成果、进展以及尚未解决的问题进行了阐述。 1并联机构的发展概况 (一)并联机构的特点 并联机构是一种闭环机构,其动平台或称末端执行器通过至少2个独立的运动链与机架相联接,必备的要素如下:①末端执行器必须具有运动自由度;②这种末端执行器通过几个相互关联的运动链或分支与机架相联接;③每个分支或运动链由惟一的移动副或转动副驱动。 与传统的串联机构相比,并联机构的零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、伸缩杆件、滑块构件、虎克铰、球铰、伺服电机等通用组件组成。这些通用组件可由专门厂家生产,因而其制造和库存备件成本比相同功能的传统机构低得多,容易组装和模块化。 除了在结构上的优点,并联机构在实际应用中更是有串联机构不可比拟的优势。其主要优点如下: (1)刚度质量比大。因采用并联闭环杆系,杆系理论上只承受拉、压载荷,是典型的二力杆,并且多杆受力,使得传动机构具有很高的承载强度。 (2)动态性能优越。运动部件质量轻,惯性低,可有效改善伺服控制器的动态性能,使动平台获得很高的进给速度与加速度,适于高速数控作业。 (3)运动精度高。这是与传统串联机构相比而言的,传统串联机构的加工误差是各个关节的误差积累,而并联机构各个关节的误差可以相互抵消、相互弥补,因此,并联机构是未来机床的发展方向。 (4)多功能灵活性强。可构成形式多样的布局和自由度组合,在动平台上安装刀具进行多坐标铣、磨、钻、特种曲面加工等,也可安装夹具进行复杂的空间装配,适应性强,是柔性化的理想机构。 (5)使用寿命长。由于受力结构合理,运动部件磨损小,且没有导轨,不存在铁屑或冷却液进入导轨内部而导致其划伤、磨损或锈蚀现象。 并联机构作为一种新型机构,也有其自身的不足,由于结构的原因,它的运动空间较小,而串并联机构则弥补了并联机构的不足,它既有质量轻,刚度大,精度高的特点,又增大了机构的工作空间,因此具有很好的应用前景,尤其是少自由度串并联机构,适应能力强,且易于控制,是当前应用研究中的一个新热点。 (二)并联机构的分类 从运动形式来看,并联机构可分为平面机构和空间机构;细分可分为平面移动机构、平面移动转动机构、空间纯移动机构、空间纯转动机构和空间混合运动机构, 另可按并联机构的自由度数分类: