气动机械手操作控制装置
气动机械手操作控制
装置
一、题目及要求:
一、气动机械手的控制要求
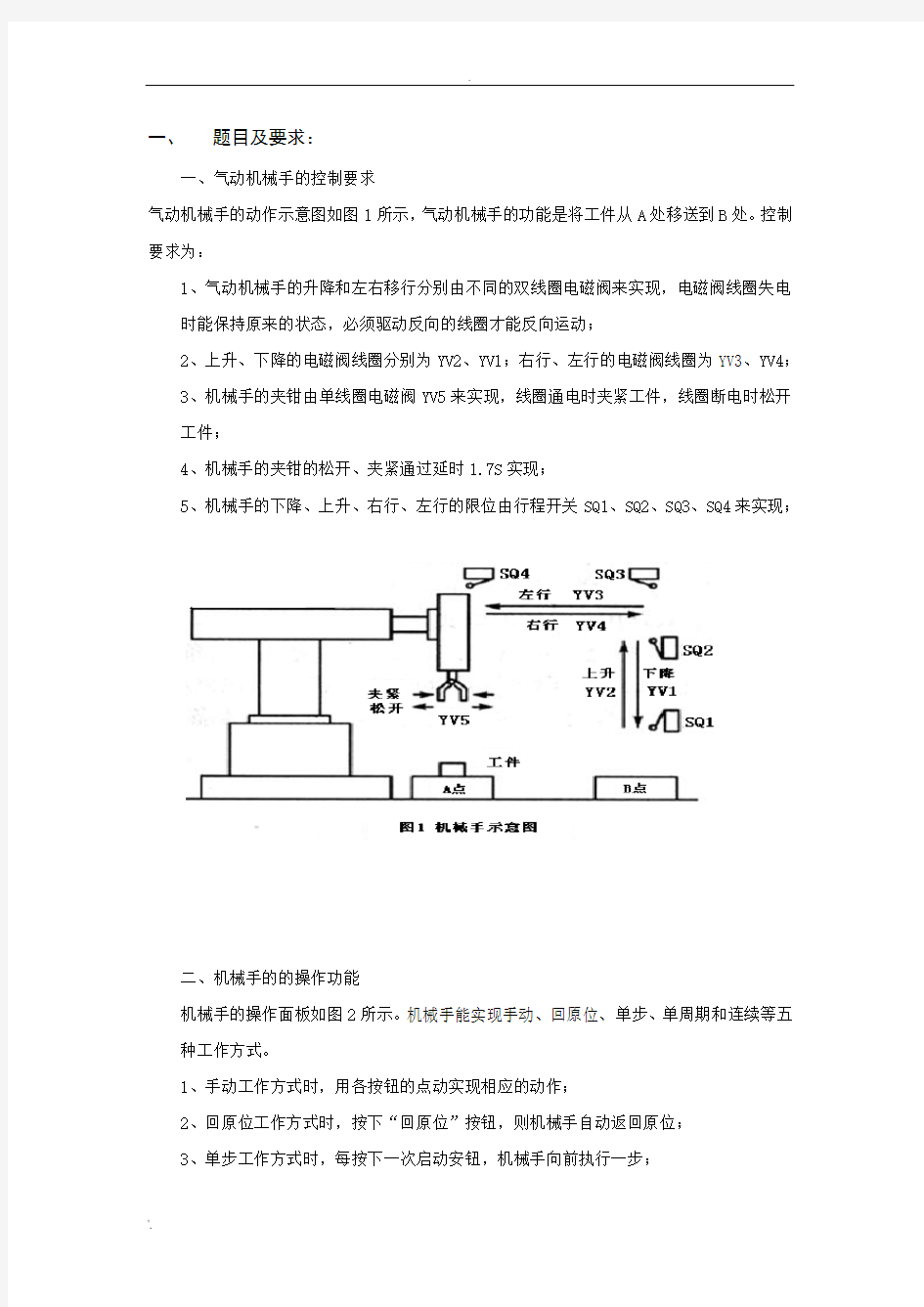
气动机械手的动作示意图如图1所示,气动机械手的功能是将工件从A处移送到B处。控制要求为:
1、气动机械手的升降和左右移行分别由不同的双线圈电磁阀来实现,电磁阀线圈失电
时能保持原来的状态,必须驱动反向的线圈才能反向运动;
2、上升、下降的电磁阀线圈分别为YV2、YV1;右行、左行的电磁阀线圈为YV
3、YV4;
3、机械手的夹钳由单线圈电磁阀YV5来实现,线圈通电时夹紧工件,线圈断电时松开
工件;
4、机械手的夹钳的松开、夹紧通过延时1.7S实现;
5、机械手的下降、上升、右行、左行的限位由行程开关SQ1、SQ2、SQ3、SQ4来实现;
二、机械手的的操作功能
机械手的操作面板如图2所示。机械手能实现手动、回原位、单步、单周期和连续等五种工作方式。
1、手动工作方式时,用各按钮的点动实现相应的动作;
2、回原位工作方式时,按下“回原位”按钮,则机械手自动返回原位;
3、单步工作方式时,每按下一次启动安钮,机械手向前执行一步;
4、单周期工作方式时,每按下一次启动安钮,机械手只运行一个周期;
5、连续工作方式时,机械手在原位,只要按下启动安钮,机械手就会连续循环工作,
直到按下停止安钮;
6、传送工件时,机械手必须升到最高点才能左右移动,以防止机械手在较低位置运行
时碰到其他工件;
7、出现紧急情况,按下紧急停车按钮时,机械手停止所有的操作。
三、大作业要求
1.列表说明I/O分配,并选择PLC。
2.画出顺序功能图。
3.画出PLC端子接线图。
4.设计PLC控制梯形图。
二、输入输出分配表
三、PLC选型
四、顺序功能图
SM00
X002
X021
X024
X023
五、PLC接线图
六、PLC梯形图
公用程序见下图用于处理各种工作方式都要执行的任务,以及处理不同工作方式之间的转换。左限位开关X004、上限位开关X002的常开触点和表示机械手松开的M45的常闭触点的串联电路接通时,原点条件M05变为ON。当机械手处于原点位置状态,在开始执行用户程序、系统处于手动或者自动回原点状态,初始步对应的M00将被置位,进入单步、单周期和连续工作方式做好准备。如果此时M05为OFF状态,M00将被抚慰,初始步为不活动步,按下启动按钮也不能进入步M20,系统不能再单步,单周期,和连续工作方式下工作。
当系统处于手动工作方式时,必须将初始步以外的各部队赢得存储器位(M20-M27)复位,否则系统从自动工作方式切换到手动工作方式,然后返回自动工作方式时,可能会出现同时有两个活动步的情况,一起错误的动作。在非连续方式下,X024的常闭出点闭合,将表示连续工作状态的标志M07复位。
LD X004
A X002
AN M45
= M05
LD SM01
O X020
O X021
LPS
A M05
S M00, 1
LPP
AN M05
R M00, 1
LD X020
R M20, 1
LDN X024
R M07, 1
下图是手动程序,为了保证安全运行,在手动程序中设置了一些必要的连锁。设置上升与下降之间,左行与右行之间的互锁,以防止功能相反的两个输出同时为ON.有限位开关限制机械手移动的范围。用限位开关X001--X004限制机械手
移动的范围。用上限位开关X002的常开触点与控制左,右行的M36和左行的M44的继电器串联,机械手升到最高位置才能左右移动,以防止机械手在较低位置运行时与别的物体碰撞。
LD X012
S M31, 1
LD X007
R M32, 1
LD X005
AN X002
AN M34
= M33
LD X010
AN X001
AN M33
= M34
LD X006
AN X004
A X002
AN M35
= M36
LD X011
AN X003
A X002
AN M36
= M35
物料分拣机械手自动化控制系统设计
物料分拣机械手自动化控制系统设计 摘要 机械手在先进制造领域中扮演着极其重要的角色。它可以搬运货物、分拣物品、代替人的繁重劳动。可以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因此被广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 本文在纵观了近年来机械手发展状况的基础上,结合机械手方面的设计,对机械手技术进行了系统的分析,提出了用气动驱动和PLC控制的设计方案。采用整体化的设计思想,充分考虑了软、硬件各自的特点并进行互补优化。对物料分拣机械手的整体结构、执行结构、驱动系统和控制系统进行了分析和设计。在其驱动系统中采用气动驱动,控制系统中选择PLC的控制单元来完成系统功能的初始化、机械手的移动、故障报警等功能。最后提出了一种简单、易于实现、理论意义明确的控制策略。 关键词:机械手;可编程控制器;自动化控制;物料分拣
目录 第一章前言 (1) 1.1研究的目的及意义 (1) 1.2主要研究的内容 (1) 第二章控制系统的组成结构和性能要求 (2) 2.1控制系统的组成结构 (2) 2.2控制系统的性能要求 (2) 第三章传感器的选择 (4) 第四章控制系统PLC的选型及控制原理 (6) 4.1 PLC控制系统设计的基本原则 (6) 4.2 PLC种类及型号选择 (10) 4.3 I/O点数分配 (10) 4.4 PLC外部接线图 (11) 4.5机械手控制原理 (12) 第五章 PLC程序设计 (14) 5.1总体程序框图 (14) 5.2初始化及报警程序 (15) 5.3手动控制程序 (16) 5.4自动控制程序 (16) 第六章总结与展望 (19) 参考文献 (20) 谢辞 (21)
机械手运动控制系统设计
机械手运动控制系统设计 基于S7200PLC村机械于的运动进行一系列控制,这些运动包括手臂上下、左右直线运动,手腕旋转运动,手爪夹紧动作和机械手整体旋转运动等。所采用的动力机构是步进电机,能够做到精确控制。在多个行程开关传感器的保护下,保证了这些运动万无一失。 工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,并已成为现代制造生产系统中的一个重要组成部分,越来越多地被研究和应用。本设汁的控制系统采用小型可编程控制器S7200PLC,具有编程简单、修改容易、可靠性高等优点。 1机械手的选择根据古典力学的观点,物体在三维空间内的静止位置是由三个坐标或围绕三轴旋转的角度来决定的。因此,物体的位置和方向(即关节的角度)能从理论上求得。在实际生产生活中,机械手的自由度不是盲目模仿人手的动作来确定的,而是根据实际需要的动作,设计出最少自由度的机械手来满足作业要求。所以一般专用机械手(不包括握紧动作)通常只具有2~3个自由度。而通用机械手则一般取4~5个自由度。本设计采用的机械手共有5个自由度。 这五个自由度为机械手能够做出手臂伸缩、手臂上下摆动、手臂左右摆动、手腕回转、手指抓紧,该机械手示意图如图1所示。 工业机械手要求精度非常高,所以本设计采用的是步进电机,步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为步距角,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数宋控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 不过步进电机需要在驱动器的作用下才能正常工作,所以还要选择驱动器,本设计选择的是价格便宜而又方便使用的中美合资SH系列步进电动机驱动器,主要由电源输入部分、信号输入部分、输出部分等,实物图和接线原理图分别如图2和图3所示。
气动机械手控制系统设计
机电控制课程 课程设计说明书 课程名称:机电控制PLC设计 设计题目:气动机械手控制系统设计 专业:机械设计制造及其自动化 班级: 姓名: 学号: 指导教师: 设计时间:2010 12 10
内容摘要 机械手是工业自动控制领域中经常用到的一种能够自动抓取、操作的装置,多用于自动生产线、自动机的上下料、数控设备的自动换刀装置中。由于气动技术是以压缩空气为介质,以气源为动力的能源传递技术,其工作可靠性高、使用寿命长、对环境没有污染,所以在机械手的驱动系统中常采用气动技术。气动机械手作为机械手的一种,它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。因此,对气动机械手的研究具有重要的实际价值。 关键词:机械手 PLC 自动控制气动技术
目录 第一章引言 (3) 第二章 PLC的发展 2.1 PLC的由来和发展 (3) 2.2 可编程控制器的概念 (4) 2.3 PLC基本结构和工作原理 (5) 第三章气动机械手控制系统设计 3.1 I/o地址分配表 (7) 3.2 PLC系统选择 (7) 3.3 PLC的输入输出设备接线图 (7) 3.4系统控制方案流程图 (9) 3.5程序设计和梯形图 (10) 第四章总结 总结 (19) 致谢 (20) 参考文献 (21)
第一章引言 引言 PLC技术代表了当今电气程序控制的世界先进水平。它与数控技术,工业机器人技术已成为机械工业自动化和CIM的三大支柱。据预测,在90年代,美、日、德等发达国家的控制屏将完全由PLC所占据。由于PLC吸收了微电子技术和计算机技术的最新成果,发展十分迅速,使它已远远超出单纯取代继电器的应用领域,远远超出逻辑控制的范畴,在从单机自动化到整条生产线自动化,乃至整个工厂的生产自动化;从FMS、工业机器人到大型分散型控制系统中都担当着重要角色。 第二章 PLC的发展 2.1 PLC的由来和发展 1968年美国最大的汽车制造商通用汽车公司(GM),为了适应汽车型号不断更新的要求,以在激烈的竞争的汽车工业中占有优势,提出要研制一种新型的工业控制装置来取代继电器控制装置,为此,特拟定了十项公开招标的技术要求,即: 1)编程简单方便,可在现场修改程序; 2)硬件维护方便,最好是插件式结构; 3)可靠性要高于继电器控制装置; 4)体积小于继电器控制装置; 5)可将数据直接送入管理计算机; 6)成本上可与继电器柜竞争; 7)输入可以是交流115V; 8)输出为交流115V,2A以上,能直接驱动电磁阀; 9)扩展时,原有系统只需做很小的改动; 10)用户程序存储器容量至少可以扩展到4KB。 根据招标要求,1969年美国数字设备公司(DEC)研制出世界上第一台PLC (PDP—14型),并在通用汽车公司自动装配线上试用,获得了成功,从而开创了工业控制新时期。 PLC问世以来,其发展极为迅速。由最初的1位机发展为8位机,现在的大型PLC已采用了32位微处理器,可同时进行多任务操作,其技术已经相当成熟。
焊接机械手设计
江苏城市职业学院五年制(高职) 毕业设计论文 设计课题:焊接机械手设计 学校:江苏城市职业学院(常熟办学点) 年级:2009级 专业:机电一体化 姓名:曹胜 学号:0921010113 指导老师:杜建峰 职称:讲师 2013年12月
摘要 本次设计是焊接机械手设计,在设计过程中,要求我们运用机电的知识完成,其设计的内容主要包括,机械手中大臂的设计,电气系统设计等内容。 此次设计的焊接机械手实际是五自由度的关节机器人。采用步进电机驱动、微机控制,结构紧凑,工作范围大,动作灵活,不仅用于弧焊作业,还可用于搬运和装配作业。 弧焊机器人在通用机械、金属结构等许多行业中得到广泛运用。弧焊机器人是包括各种电弧焊附属装置在内的柔性焊接系统,而不只是一台以规划的速度和姿态携带焊枪移动的单机,因而对其性能有着特殊的要求。在弧焊作业中,焊枪应跟踪工件的焊道运动,并不断填充金属形成焊缝。因此运动过程中速度的稳定性和轨迹精度是两项重要指标。一般情况下,焊接速度约取5-50mm/s,轨迹精度约为±(0.2-0.5)mm。 电气系统的设计就是运用机电传动的知识,即PLC系统进行控制,PLC控制系统有西门子系统,欧姆龙系统等。 关键词:焊接机械手 PLC
目录 前言 (1) 第一章焊接机械手的总体方案设计 (2) 1.1 焊接机器人的主要组成 (2) 1.2 焊接机器人大臂的设计 (3) 1.2.1 大臂的工作方式 (3) 1.2.2 大臂电动机的选择 (3) 1.2.3 大臂上谐波齿轮传动的设计 (4) 1.3 焊接机器人末端执行器的设计 (6) 第二章PLC系统设计 (9) 2.1电气设备概述 (9) 2.1.1电气控制的变压系统部分设计 (9) 2.1.2电气控制的部分设计 (9) 2.2 PLC的应用 (11) 2.2.1 梯形图的设计 (11) 2.2.2 用功能表图表示控制过程 (13) 2.2.3 I/O分配表与配线图 (14) 2.2.4 写出梯形图 (16) 小结 (19) 致谢 (20) 参考文献 (21)
(完整版)基于plc的机械手控制系统设计
前言 随着我国工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、转向、输送或操持焊枪、喷枪、扳手等工具进行加工、装配等作业的自动化,已愈来愈引起人们的重视。 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。 机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。 本文将通过西门子PLC控制机械手,PLC是可编程控制器(Programmable Logic Controller)的简称,是在继电顺序控制基础上发展起来的以微处理器为核心的通用的工业自动化控制装置。随着电子技术和计算机技术的迅猛发展,PLC的功能也越来越强大,更多地具有计算机的功能。目前PLC已经在智能化、网络化方面取得了很好的发展。该系统利用西门子PLC,在步进电机驱动下,完成对机械手在搬运过程中的下降、夹紧、上升、右旋、下降、放松、上升、左旋等全过程自动化控制,并对非正常情况实行自动报警和自动保护,实现企业的机电一体化,提高企业的生产效率。
气动机械手控制系统设计
气动机械手课程设计说明书 设计题目: 气动机械手结构及控制系统设计 学生姓名: 学号:1204010714 专业班级: 指导教师: 2015年07月23日
目录 摘要 (1) 第一章气动机械手课题研究的意义、目的 (1) 1.1课题设计的意义 (1) 1.2课题设计的目的 (2) 第二章总体方案设计 (2) 第三章机械系统的设计与计算 (4) 3.1工况分析 (4) 3.2机械手重要部件的设计计算与校核 (4) 第四章气动系统设计 (5) 4.1气动系统原理 (5) 4.2气动系统原理图 (5) 4.3气动系统控制过程 (6) 第五章气动系统附件的选择 (6) 5.1分水过滤器 (6) 5.2油雾器的选择 (7) 5.3减压阀选择 (8) 5.4管道与管接头 (8) 5.5换向阀的选择 (8) 5.6单向节流阀的选择 (8) 第六章PLC控制系统设计 (9) 6.1 PLC硬件系统设计 (9) 6.2软件的设计 (10) 总结 (14) 参考文献 (15) 附图 (16)
交通大学机械工程学院气动机械手设计说明书(论文) 摘要 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。机械手主要由手部、运动机构和控制系统三大部分组成。它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点。气动机械手控制系统的设计要求是在控制系统的指令下,能将工件迅速、灵活、准确、可靠地抓起并运送到指定位置。在工业生产中,利用气动机械手将工件从一条生产线搬运到另一条生产线是一种高效的工作方式。因此采用PLC可编程控制器作为工件抓取机械手的控制系统,根据机械手的控制要求和操作功能,设置动作流程,分配输入输出接点,按所需来选PLC的型号,接着进行梯形图的编辑,最后进行程序的编辑与调试,从而使机械手能够完成符合设计要求的动作。 关键词:机械手、可编程控制器、PLC、控制设计 第一章气动机械手课题研究的意义、目的 1.1 课题设计的意义 机械手是工业自动化领域中经常遇到的一种控制对象。近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。机械手广泛地应用与锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。国内外都十分重视它的应用和发展。自动化还可以节省大量的人力、物力等。
多用途气动机器人结构设计说明书
第一章引言 1.1 工业机械手概述 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人应用情况,是一个国家工业自动化水平的重要标志。生产中应用机械手可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用。机械手的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。 气压传动机械手是以压缩空气的压力来驱动执行机构运动的机械手。其主要特点是:介质李源极为方便,输出力小,气动动作迅速,结构简单,成本低。但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作。 气动技术有以下优点: (1)介质提取和处理方便。气压传动工作压力较低,工作介质提取容易,而后排入大气,处理方便,一般不需设置回收管道和容器:介质清洁,管道不易堵存在介质变质及补充的问题. (2)阻力损失和泄漏较小,在压缩空气的输送过程中,阻力损失较小(一般不卜浇塞仅为油路的千分之 一),空气便于集中供应和远距离输送。外泄漏不会像液压传动那样,造成压力明显降低和严重污染。 (3)动作迅速,反应灵敏。气动系统一般只需要0.02s-0.3s即可建立起所需的压力和速度。气动系统也能实现过载保护,便于自动控制。 (4)能源可储存。压缩空气可存贮在储气罐中,因此,发生突然断电等情况时,机器及其工艺流程不致突然中断。 (5)工作环境适应性好。在易燃、易爆、多尘埃、强磁、强辐射、振动等恶劣环境中,气压传动与控制系统比机械、电器及液压系统优越,而且不会因温度变化影响传动及控制性能。 (6)成本低廉。由于气动系统工作压力较低,因此降低了气动元、辅件的材质和加工精度要求,制造容易,成本较低。传统观点认为:由于气体具有可压缩性,因此,在气动伺服系统中要实现高精度定位比较困难(尤其在高速情况下,似乎更难想象)。此外气源工作压力较低,抓举力较小。虽然气动技术作为机器人中的驱动功能已有部分被工业界所接受,而且对于不太复杂的机械手,用气动元件组成的控制系统己被接受,但由于气动机器人这一体系己经取得的一系列重要进展过去介绍得不够,因此在工业自动化领域里,对气动机械手、气动机器人的实用性和前景存在不少疑虑。 1.2 气动机械手的设计要求 1.2.2 课题的设计要求 本课题将要完成的主要任务如下: (1)机械手为通用机械手,因此相对于专用机械手来说,它的适用面相对较广。 (2)选取机械手的座标型式和自由度。
小型气动机械手的设计
小型气动机械手的设计 摘要:本文主要进行了气动机械手的总体结构设计和气动设计。机械手的机械结构由气缸、气爪和连接件组成,可按预定轨迹运动,实现对工件的抓取、搬运和卸载。气动部分的设计主要是选择合适的控制阀,设计合理的气动控制回路,通过控制和调节各个气缸压缩空气的压力、流量和方向来使气动执行机构获得必要的力、动作速度和改变运动方向,并按规定的程序工作。气动机械手作为机械手的一种, 它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。 关键词:气动机械手;气缸;控制阀;回路;设计 Design of Small Pneumatic Manipulator Abstract:This article mainly has carried on the overall structural design and aerodynamic design of pneumatic manipulator. Robot mechanical structure is composed of a cylinder, a pneumatic claw and a connecting piece, according to a predetermined trajectory, on a workpiece gripping, conveying and unloading. Pneumatic main part of the design is to choose appropriate control valve, the rational design of pneumatic control circuit, the control and regulation of each cylinder of compressed air pressure, flow and direction to the pneumatic actuator to obtain the necessary force, speed of action and change the direction of movement, and according to the prescribed procedures work.Pneumatic machinery as a manipulator, which has the advantages of simple structure, light weight, quick action, stable, reliable, energy saving and no pollution to environment has been widely used. Key words: Pneumatic manipulator; cylinder; control valve; Circuit; the design 1 前言 机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。因此,世界各国都把发展机械工业作为发展本国经济的
焊接机械手毕业设计
焊接机械手毕业设计 【篇一:自动焊接机械手设计(毕业设计)】 自动焊接机械手设计 1 绪论 1.1 技术概述 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测 传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三 维空间完成各种作业的机电一体化自动化生产设备。特别适合于多 品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。 机器人技术是综合了计算机、控制论、机构学、信息和传感技术、 人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动 化水平的重要标志。 机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长 和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速 反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗 恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它 是工业以及非产业界的重要生产和服务性设备,也是先进制造技术 领域不可缺少的自动化设备。 1.2 现状及国内外发展趋势 国外机器人领域发展近几年有如下几个趋势: (1)工业机器人性能不断提高(高速度、高精度、高可靠性、便于操 作和维修),而单机价格不断下降,平均单机价格从91年的10.3 万美元降至97年的6.5万美元。 (2)机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、检测系统三位一体化;由关节模块、连杆模块用重组 方式构造机器人整机;国外已有模块化装配机器人产品问市。 (3)工业机器人控制系统向基于pc机的开放型控制器方向发展,便 于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模 块化结构;大大提高了系统的可靠性、易操作性和可维修性。 (4)机器人中的传感器作用日益重要,除采用传统的位置、速度、加 速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、
示教机械手控制系统设计
百度文库- 让每个人平等地提升自我 0前言 / 机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到 生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。因为,它能大大地 改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。因此,受到各先进单 位的重视并投入了大量的人力物力加以研究和应用。尤其在高温、高压、粉尘、噪声的 场合,应用得更为广泛。在我国,近代几年来也有较快的发展,并取得一定的成果,受 到各工业部门的重视。在生产过程中,经常要对流水线上的产品进行分捡,本课题拟开 发物料搬运机械手,采用的德 结束语 目录 0前言 0 1 课程设计的任务和要求 ...................................................................... 1 课程设计的任务 ............................................................................ 1 课程设计的基本要求 (3) 2总体设计 (3) PLC 的选型 端子分配图 3 PLC 程序设计 设计思想... 顺序功能图 4程序调试说明 参考文献
国西门子S7-200系列PLC对机械手的上下、左右以及抓取运动进行控制。我们利用可编 程技术,结合相应的硬件装置,控制机械手完成各种动作。 机电传动以及控制系统总是随着社会生产的发展而发展的。单就机电而言,它的发展大体上经历了成组拖动,单电动机拖动和多电动机拖动三个阶段。所谓成组拖动,就是一台电动机拖动一根天轴,再由天轴通过皮带轮和皮带分别拖动各生产机械,这种生产方式效率低,劳动条件差,一旦电动机放生故障,将造成成组机械的停车;所谓但电动机的拖动,就是用一台电动机拖动一台生产机械,它虽然较成组拖动前进了一步,但当一台生产机械的运动部件较多时,机械传动机构复杂;多电动机拖动,即是一台生产机械的每一个运功部件分别由一台电动机拖动,这种拖动的方式不仅大大的简化了生产 机械的传动机构,而且控制灵活,为生产机械的自动化提供了有利的条件。 、1课程设计的任务和要求 课程设计的任务 1)示教机械手控制系统设计 2)示教机械手系统示意图如下图所示
PLC机械手操作控制系统
摘要 在现代工业中 , 生产过程的机械化、自动化已成为突出的主题。随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等。已经随处可见。同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有 毒气体、有害气体场合以及水下作业等,这写恶劣的生产环境不利于人工进行操作。工 业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动 化实践相结合的产物。并以为现代机械制造生产系统中的一个重要组成部分。工业机械 手是提高生产过程自动化、改善劳动条件、提高产品质量和身效益的有效手段之一。尤 其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。在我国, 近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。 机械手是在自动化生产过程中发展起来的一种新装置。广泛应用于工业生产和其他领域。PLC已在工业生产过程中得到广泛应用,应用 PLC控制机械手能实现各种规定工序动作,对生产过程有着十分重要的意义。论文以介绍 PLC在机械手搬运控制中的应用,设计了一套可行的机械手控制系统,并给出了详细的 PLC程序。设计完成的机械手可以在空间抓放、搬运物体等,动作灵活多样。 整个搬运机构能完成四个自由度动作,手臂伸缩、手臂旋转、手爪上下、手爪紧松。关键词:可编程控制器 ,PLC, 机械手操作控制系统 .
目录 第一章概述 (1) 1.1 PLC 控制系统 (1) 1.1.1PLC 的产生 (1) 1.1.2PLC 的特点及应用 (2) 1.2选题背景 (3) 1.2.1机械手简介 (3) 第二章PLC 控制系统设计 (6) 2.1总体设计 (6) 2.1.1制定控制方案 (6) 2.1.2系统配置 (6) 2.1.3控制要求 (9) 2.1.4控制面板 (12) 2.1.5 外部接线图 (13) 2.2.2手动方式状态 (16) 2.2.3回原点状态转移图: (19) 2.2.4自动方式状态 (19) 第三章控制系统内部软组件 (21) 3.1 内部软组件的概述 (21) 3.1.1输入继电器 (21) 3.1.2输出继电器 (21) 3.1.3辅助继电器 (22) 3.1.4状态组件 (23) 3.1.5定时器 (23) 错误!未定义书签。致谢 ........................................................................................................... 参考文献 (24)
气动机械手的PLC控制系统的设计
毕业设计报告 课题:气动机械手PLC控制系统的设计 系部:电气工程系 专业:机电一体化技术 班级:机电092 姓名:XXX 学号:XXXXXXX 指导老师:XXXX 2011.3
江苏信息职业技术学院毕业设计报告 目录 摘要 (3) 第一章机械手的简介 (4) 1.1 概述 (4) 1.2 机械手的组成 (4) 1.3 机械手的应用 (4) 1.4 机械手应用 (4) 第二章机械手机械设计 (5) 2.1 机械手总体结构设计 (5) 2.2 机械手的工作原理 (6) 2.3 机构模块化设计 (7) 2.4 手部结构设计 (8) 第三章机械手机械控制设计 (10) 3.1 工作过程与控制要求 (10) 3.2 气动驱动设计的简述 (11) 3.3 PLC控制系统设计 (12) 结束语 (20) 谢辞 (21) 参考文献 (22)
气动机械手PLC控制系统的设计 气动机械手PLC控制系统的设计 摘要:气动技术具有一系列显著优点,在工业生产中得到越来越广泛的应用,己成为自动化不可缺少的重要手段。进入 90 年代后,气动技术更突破传统死区,经历着飞跃性进展。再者,冲压自动化是解决冲压生产成本及安全问题、提高冲压生产企业效益的必然选择,而冲压机械手是冲压自动化的重要组成部分。但是,目前冲压机械手高昂的价格却使国内众多的中小冲压企业望而却步。 PLC是以现代微处理器技术为核心的控制器,作为一种通用的工业控制器,其可靠性高、抗干扰能力强;PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性,此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息;PLC采用光电隔离和滤波技术技术有效抑制外部干扰源对PLC的影响,此外PLC还可在强、通用性好;开发周期短,功耗小。本课题对现代工业的的发展具有很重要的意义。 关键词:意义,应用,原理,plc,机械手,气动控制技术
焊接机器手的编程技巧及应用讲解
焊接机械手的编程技巧及应用讲解 随着制造业劳动成本的上涨,机械手产品价格的不断下降,人们更加追求更舒适的工作条件,机械手的应用每年递增。 工业机械手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备,特别适合于多品种变批量的柔性生产。它对稳定、提高产品质量,提高生产效率改善劳动条件和产品的快速更新换代起着十分重要的作用。 自从20世纪60年代初,人类创造了第一台自动化机械手以后,自动化机械手就显示出它极大的生命力,在短短40多年的时间中,自动化机械手技术得到了迅速的发展,自动化机械手已在工业发达国家的生产中得到了广泛的应用。目前,自动化机械手已广泛应用于汽车及汽车零部件制造业、机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、木材与家具制造业等领域中。在工业生产中,焊接机械手、装配机械手、上下料机械手、点焊机械手、喷涂机械手、注塑机械手、及搬运机械手等工业自动化机械手都已被大量采用。本文以下重点介绍焊接机械手。 焊接机械手 焊接机械手是从事焊接(包括切割与喷涂)的工业自动化机械手,它主要包括机械手和焊接设备两部分。其中,机械手由机械手本体和控制柜(硬件及软件)组成;而焊接装备,以弧焊及点焊为例,则由焊接电源(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机械手,还应配有传感系统,如激光或摄像传感器及其控制装置等。 1、点焊机械手的特点 由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以点焊机械手的变压器必须尽量小型化。对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,工业上已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接,焊接参数由定时器调节。目前,新型定时器已经微机化,因此机械手控制柜可以直接控制定时器,无需另配接口。点焊机械手的焊钳,用电伺服点焊钳,焊钳的张开和闭合由伺服电机驱动,码盘反馈,使焊钳的张开度可以根据实际需要任意选定并预置,而且电极间的压紧力也可以无级调节。 电伺服点焊钳具有如下优点: (1)每个焊点的焊接周期可大幅度降低,因为焊钳的张开程度是由机械手精确控制的,机械手在点与点之间的移动过程,焊钳就可以开始闭合;而焊完一
气动机械手控制系统设计
机电控制课程课程设计说明书 课程名称:机电控制PLC设计 设计题目:气动机械手控制系统设计专业:机械设计制造及其自动化班级: 姓名: 学号: 指导教师: 设计时间:2010 12 10
内容摘要 机械手是工业自动控制领域中经常用到的一种能够自动抓取、操作的装置,多用于自动生产线、自动机的上下料、数控设备的自动换刀装置中。由于气动技术是以压缩空气为介质,以气源为动力的能源传递技术,其工作可靠性高、使用寿命长、对环境没有污染,所以在机械手的驱动系统中常采用气动技术。气动机械手作为机械手的一种,它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。因此,对气动机械手的研究具有重要的实际价值。 关键词:机械手 PLC 自动控制气动技术
目录 第一章引言 (3) 第二章 PLC的发展 2.1 PLC的由来和发展 (3) 2.2 可编程控制器的概念 (4) 2.3 PLC基本结构和工作原理 (5) 第三章气动机械手控制系统设计 3.1 I/o地址分配表 (7) 3.2 PLC系统选择 (7) 3.3 PLC的输入输出设备接线图 (7) 3.4系统控制方案流程图 (9) 3.5程序设计和梯形图 (10) 第四章总结 总结 (19) 致谢 (20) 参考文献 (21)
第一章引言 引言 PLC技术代表了当今电气程序控制的世界先进水平。它与数控技术,工业机器人技术已成为机械工业自动化和CIM的三大支柱。据预测,在90年代,美、日、德等发达国家的控制屏将完全由PLC所占据。由于PLC吸收了微电子技术和计算机技术的最新成果,发展十分迅速,使它已远远超出单纯取代继电器的应用领域,远远超出逻辑控制的范畴,在从单机自动化到整条生产线自动化,乃至整个工厂的生产自动化;从FMS、工业机器人到大型分散型控制系统中都担当着重要角色。 第二章 PLC的发展 2.1 PLC的由来和发展 1968年美国最大的汽车制造商通用汽车公司(GM),为了适应汽车型号不断更新的要求,以在激烈的竞争的汽车工业中占有优势,提出要研制一种新型的工业控制装置来取代继电器控制装置,为此,特拟定了十项公开招标的技术要求,即: 1)编程简单方便,可在现场修改程序; 2)硬件维护方便,最好是插件式结构; 3)可靠性要高于继电器控制装置; 4)体积小于继电器控制装置; 5)可将数据直接送入管理计算机; 6)成本上可与继电器柜竞争; 7)输入可以是交流115V; 8)输出为交流115V,2A以上,能直接驱动电磁阀; 9)扩展时,原有系统只需做很小的改动; 10)用户程序存储器容量至少可以扩展到4KB。 根据招标要求,1969年美国数字设备公司(DEC)研制出世界上第一台PLC (PDP—14型),并在通用汽车公司自动装配线上试用,获得了成功,从而开创了工业控制新时期。 PLC问世以来,其发展极为迅速。由最初的1位机发展为8位机,现在的大型PLC已采用了32位微处理器,可同时进行多任务操作,其技术已经相当成熟。
国产焊接机器人的应用与案例
一、前景: 1.1 低成本竞争的加剧,环境法规的日趋严格,以及从业人员生产技能的降低,致使制造商承受着越来越大的压力。此外,制造商还面临提高生产力、产品质量及安全水平的挑战。在这种形式下,采取可持续的制造解决方案是一条成本效益显著的途径,可实现经济效益、环境效益乃至工厂总体绩效的全面改善。由于工业自动化的全面发展和科学技术的不断提高,对工作效率的提高迫在眉睫。单纯的手工劳作以满足不了工业自动化的要求,因此,必须利用先进设备生产自动化机械以取代人的劳动,满足工业自动化的需求。其中工业机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在制造行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的焊接、搬运、装卸,尤其是在工作环境高温辐射恶劣焊接使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把焊机设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。 1.2焊接机械手应用及发展现状和趋势 目前,我国大多数工厂的生产线上工件的焊接成型仍由人工完成,其劳动强度大、生产效率低,而且具有一定的危
险性,已经满足不了生产自动化的发展趋势。为了提高工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代机械行业自动化生产的要求,针对具体生产工艺,结合加工工件的实际结构,利用机械手技术,设计用一台焊接机械手代替人工工作,以提高劳动生产率。本机械手主要与焊接辅机组合最终形成焊接生产工作站,实现加工过程的自动化和无人化。目前,国内外各种机械手和机械手的研究成为科研的热点,其研究的现状和大体趋势如下: a.机械结构向模块化、可重构化发展。 b.工业机械手控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化、智能化;器件集成度提高,结构小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性,而且维修方便。 c.支持各种焊接工艺(氩弧焊接,CO2焊接等)。 1.支持示教编辑,编程更方便。 2.XYZU动作及其各气动部件逻辑关系清晰明了,轴及IO 可独立或并联控制(支持直线、圆弧插补功能)。 3:完善的工艺设置参数及指令集,系统运行更平滑顺畅。本系统支持直线,圆弧,螺旋, 三轴空间圆弧插补,四轴空间圆弧插补,支持三轴圆弧跟随U轴,摆焊。2路0-10V电压信号输出。8路0-10v电压输入。跟多电压输出要求.可以扩展。 4:控制系统经过严格多项可靠性测试,如EFT(电快速瞬变/脉冲群)、EMC(电磁兼容性)、ESD(静电放电测试)、高低
气动机械手控制系统设计
@ 目录之中。 机电工程学院 、 课程设计说明书设计题目: 气动机械手控制系统设计 学生姓名: 学号: 专业班级:机制F09 、 指导教师:
2012 年 12 月 12 日
内容摘要 在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。自从工业机械手问世以来,相应的各种难题迎刃而解。工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并已成为现代机械制造生产系统中的一个重要组成部分。在我国,近几年也有较快的发展,并取得了一定的效果,受到机械工业和铁路工业等部门的重视。机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。机械手一般由耐高温、抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。PLC可以按照所需要求完成机械手的设计,使机械手的设计简单化,大大节省了时间。本文应用西门子S7—200系列PLC来实现气动机械手的搬运控制系统,该系统充分利用了可编程控制器(PLC)的控制功能。利用可编程技术结合相应的硬件装置,控制气动机械手完成各种动作。该系统具有结构简单、可靠稳定、容易控制等优点。 关键词:气动机械手;S7—200系列PLC;CPU226;
目录 第1章引言 (1) 第2章系统总体方案设计 (2) 程序设计的基本思路 (2) 气动机械手的控制要求 (2) 系统的硬件结构与操作功能 (2) 硬件结构 (2) 气动机械手的操作功能 (3) 第3章 PLC控制系统设计 (4) 可编程控制器的CPU选择 (4) 气动机械手的I/O地址分配表 (4) PLC的输入输出设备接线图 (5) 气动机械手控制流程图 (6) 程序设计梯形图 (7) 语句表 (15) PLC程序调试 (23) 结论 (30) 设计总结 (31) 谢辞 (32) 参考文献 (33)
气动机械手设计内含计算步骤及尺寸装配图等等
气动机械手设计-内含计算步骤及尺寸装配图等等
————————————————————————————————作者:————————————————————————————————日期:
毕业设计(论文) 课题名称:气动机械手的设计 专业班级: 学生姓名: 指导教师: 201 年月
目录 摘要.......................................................... 4 第一章前言? 1.1机械手概述...............................................5 1.2机械手的组成和分类.............................. (5) 1.2.1机械手的组成....................................... 4 1.2.2机械手的分类.......................................6第二章机械手的设计方案 2.1机械手的坐标型式与自由度..............................8 2.2机械手的手部结构方案设计.............................. 8 2.3机械手的手腕结构方案设计.............................. 9 2.4机械手的手臂结构方案设计...............................9 2.5机械手的驱动方案设计...................................9 2.6机械手的控制方案设计...................................9 2.7机械手的主要参数.......................................9 2.8机械手的技术参数列表...................................9 第三章手部结构设计 3.1夹持式手部结构.........................................11 3.1.1手指的形状和分类.................................11 3.1.2设计时考虑的几个问题.............................14 3.1.3手部夹紧气缸的设计...............................14 第四章手腕结构设计 4.1手腕的自由度....................................... (19) 4.2手腕的驱动力矩的计算..................................19 4.2.1手腕转动时所需的驱动力矩........................ 20 4.2.2回转气缸的驱动力矩计算...........................22第五章手臂伸缩,升降,回转气缸的设计与校核 5.1手臂伸缩部分尺寸设计与校核.............................23 5.1.1尺寸设计.........................................23 5.1.2尺寸校核...................................... (2) 4 5 .1 .3导向装置.......................................25 5 .1 .4平衡装置.......................................25 5.2手臂升降部分尺寸设计与校核.............................265.2.1尺寸设计.........................................26. 5.2.2尺寸校核...................................... (26)