结构力学论文-关于几种求解超静定问题方法的分析
结构力学论文
关于几种求解超静定问题方法的分析摘要:在对理论力学课程的学习中我们知道,结构分为静定和超静定,而超静定结构是工程实际非常常用的一类结构,大部分建筑结构都是超静定结构,于是怎样解决超静定问题便成为一个很实际的问题。
关键词:超静定结构力法位移法
引言:从理论力学第五章开始,我们依次学习了力法、位移法以及力矩分配法等方法,对解决超静定问题有了一个比较全面的学习,然而对于初学者,怎样熟练运用这些方法,什么样的情况下有什么方法更简便便可能成为难点,下面我们试着依次对这些方法做一个总结。力法
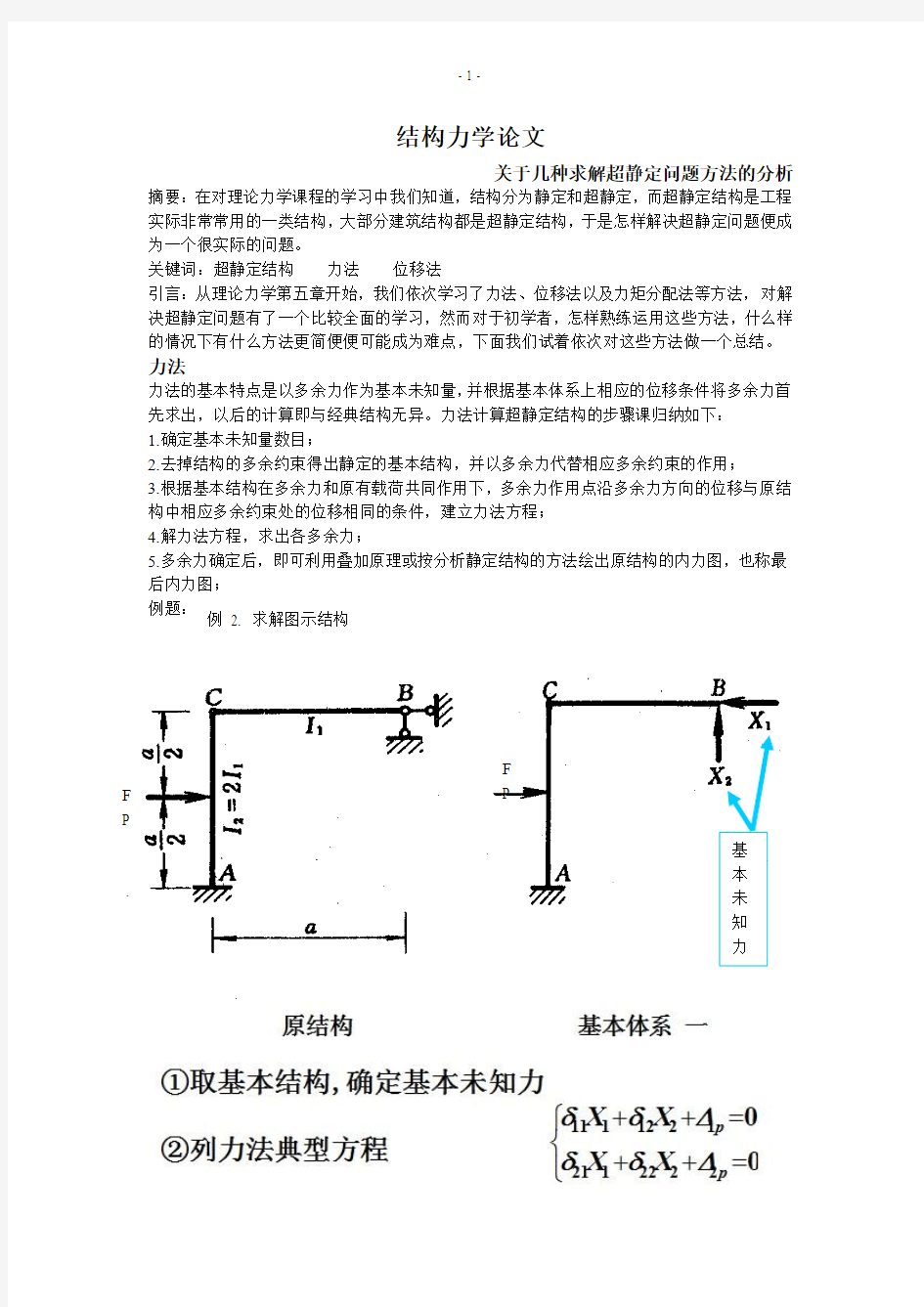
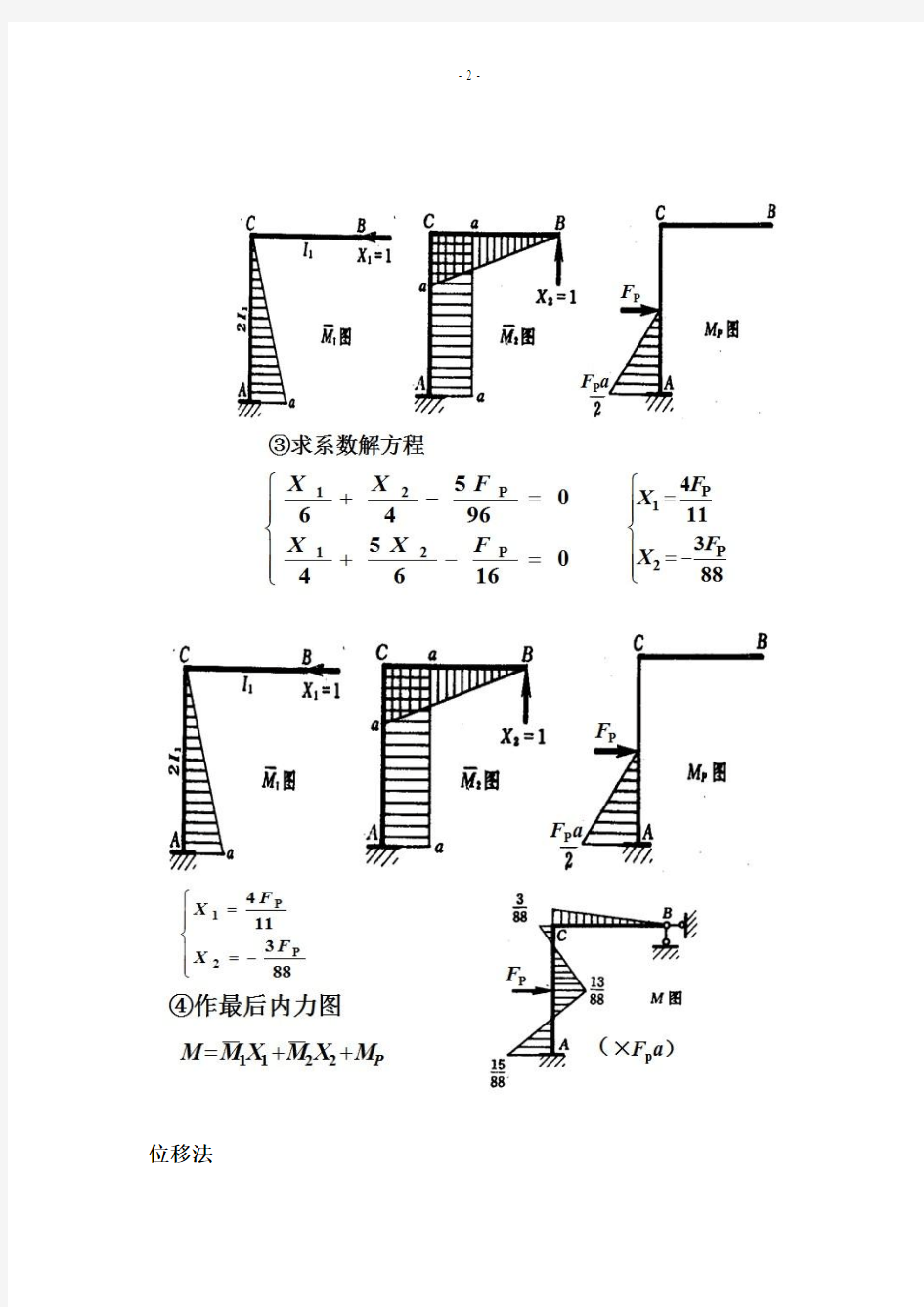
力法的基本特点是以多余力作为基本未知量,并根据基本体系上相应的位移条件将多余力首先求出,以后的计算即与经典结构无异。力法计算超静定结构的步骤课归纳如下:
1.确定基本未知量数目;
2.去掉结构的多余约束得出静定的基本结构,并以多余力代替相应多余约束的作用;
3.根据基本结构在多余力和原有载荷共同作用下,多余力作用点沿多余力方向的位移与原结构中相应多余约束处的位移相同的条件,建立力法方程;
4.解力法方程,求出各多余力;
5.多余力确定后,即可利用叠加原理或按分析静定结构的方法绘出原结构的内力图,也称最后内力图;
例题:
F P
F
P
例
2. 求解图示结构
基
本
未
知
力
位移法
由于在一定的外因作用下,结构的内力和位移之间恒具有一定的关系,于是可把结构的某些位移作为基本未知量,首先求出它们,然后再据此确定结构的内力,这样的方法称为位移法。 位移的计算的步骤归纳如下;
1.确定位移法基本未知量,加入附加约束,取位移法基本体系;
2.令附加约束发生与原结构相同的节点位移,根据基本结构在载荷等外因和节点位移共同作用下产生的附加约束的总反力(矩)=0,列位移法典型方程;
3.绘出单位弯矩图、载荷弯矩图,利用平衡条件求系数和自由项;
4.解方程,求出节点位移;
5.用公式叠加最后弯矩图,并校核平衡条件;
6.根据M 图由杆件平衡求Q ,绘Q 图,再根据Q 图由节点投影平衡求N ,绘N 图;
力矩分配法
力矩分配法采用轮流放松各节点的方法,使所有刚结点逐步达到平衡,属于渐进法。其计算的步骤归纳如下:
1.设想在刚结点出加上附加刚臂,求出各杆端产生的固端弯矩;
2.汇交于该结点处的各杆固端弯矩只代数和即为该结点的不平衡力矩F
M ; 3.按式∑=
S
S j
j 11μ计算汇交于该点的各杆端的分配系数;
4.将不平衡力矩反号乘以各杆端的分配系数记得近端的分配弯矩,再将分配弯矩乘以传递系数,便得到远端的传递弯矩;
5.各杆端的最后弯矩等于该端的固端弯矩与该端的分配弯矩或传递弯矩之和。 例题:
总结:对于不同方法的使用,在不断积累经验的基础上应遵循一定的方法,一般说来,凡是多余约束多而结点位移少的结构,采用位移法简单,反之则力法由于位移法。力矩分配法是位移法的变体,它避免了建立和解算联立方程的工作,能直接计算杆端弯矩,适用于计算连续梁和无侧移刚架,需要注意的是,力矩分配法的实质仍是位移法。近年来随着计算机的普及,矩阵位移法也出现了,它是利用计算机的处理能力能够求解杆系结构的一种结构计算方法,在工程应用中意义巨大,此方法值得在今后的学习中学习使用。
各年考研结构力学问答题答案
2010年 1. 分析结构动力自由度与结构静力自由度是否一致 结构的动力自由度是指确定运动过程中任一时刻全部质量的位置所需的独立几何参数的数目。该定义与静力自由度在数学意义上是一致的,但是物理概念不同:静力自由度只涉及刚体体系的机构运动,排除了各个组成部件的变形运动;动力自由度要考虑体系变形过程中质量的运动自由度。 2. 试简要分析同样跨度的直梁、拱、索受横向荷载时的本质区别 直梁受横向荷载(垂直于轴线方向)时只有弯矩和剪力;由于支座水平推力的作用,拱在竖直向下的荷载作用下产生向内的水平反力;索式结构在竖直向下的荷载作用下,其支座产生向外的水平反力。 2009年 1. 简要说明稳定和稳定自由度的概念 稳定是指结构保持原有平衡形式。稳定自由度:确定结构失稳时所有可能的变形状态所需的独立参数数目。 2. 极限分析的目的是什么?极限分析是否一定要采用塑性铰模型?寻找结构丧失承载能力时的极限状态和确定结构所能承受的荷载极限值并确定极限状态下满足应力边界条件的应力分布规律。不一定,梁和钢架适合采用塑性铰模型,板则需采用塑性铰线模型。 3. 试分析“虚功原理”中“虚功”的物理含义,与采用实功的能量 法相比,“虚功原理”有何优势? “虚功”中的“虚”指位移Δ是任意假定的,与作用于质点上的力无关。发生了虚位移Δ的过程中,力系所作的总功即为“虚功”。实功是对dt所作的功,而虚功是对dx作的功,实功与物体的本身运动状态有关,而虚功只与物体约束条件有关。 4. 支座位移对静定和超静定结构内力和位移有何影响? 对于超静定结构:使支座产生反力,同时产生位移; 对于静定结构:不产生反力,只产生位移。 5. 拱和索的结构特性有何联系和区别 悬索在在荷载等外因下只产生轴向拉力,不产生压力、剪力、不承受弯矩; 拱在竖直向下的荷载作用下,拱的支座产生向内的水平反力。 索式结构在竖直向下的荷载作用下,其支座产生向外的水平反力。 6. 力法、位移法、力矩分配法、矩阵位移法各适用于什么情况 力法:以静定结构为基本体系,将多余约束力作为基本未知量,根据变形条件建立力法方程
结构力学(静定结构内力)练习题
二、静定结构的内力 1、静定结构的全部内力及反力,只根据平衡条件求得,且解答是唯一的。( ) 2、静定结构受外界因素影响均产生内力。大小与杆件截面尺寸无关。 ( ) 3、静定结构的几何特征是: A. 无多余的约束; B.几何不变体系; C. 运动自由度等于零; D.几何不变且无多余约束。 ( ) 4、静定结构在支座移动时,会产生: A. 内力; B. 应力; C. 刚体位移; D. 变形。 ( ) 5、叠加原理用于求解静定结构时,需要满足的条件是: A. 位移微小且材料是线弹性的; B.位移是微小的; C. 应变是微小的; D.材料是理想弹性的。( ) 6、在相同的荷载和跨度下,静定多跨梁的弯距比一串简支梁的弯距要大。 ( ) 7、荷载作用在静定多跨梁的附属部分时,基本部分一般内力不为零。() 8、图示为一杆段的M、Q图,若Q图是正确的,则M图一定是错误的。 ( ) M 图 Q图 9、图示结构的支座反力是正确的。 ( ) 10、当三铰拱的轴线为合理拱轴时,则顶铰位置可随意在拱轴上移动而不影响拱的内力。( ) 11、简支支承的三角形静定桁架,靠近支座处的弦杆的内力最小。 ( ) 12、图示桁架有9根零杆。 ( ) 13、图示对称桁架中杆1至8的轴力等于零。 ( )
14、图示桁架中,上弦杆的轴力为N = - P 。 ( ) 15、图示结构中,支座反力为已知值,则由结点D 的平衡条件即可求得。 ( ) N CD A B C D E 16、图示梁中,BC 段的剪力Q 等于 ,DE 段的弯矩等于 。 17、在图示刚架中, = M DA , 使 侧受拉。 a 18、图示桁架中,当仅增大桁架高度,其它条件均不变时,对杆1和杆2的内力影响是: A .N 1,均减小; B .N 2N 1,均不变; N 2C .N 1减小,不变; D .N 2N 1增大,不变。 ( ) N 2
超静定结构(精)
第4章超静定结构 §4.1 超静定结构特性 ●由于多余约束的存在产生的影响 1. 内力状态单由平衡条件不能惟一确定,必须同时考虑变形条件。 2. 具有较强的防护能力,抵抗突然破坏。 3. 内力分布范围广,分布较静定结构均匀,内力峰值也小。 4. 结构刚度和稳定性都有所提高。 ●各杆刚度改变对内力的影响 1. 荷载作用下内力分布与各杆刚度比值有关,与其绝对值无关。 2. 计算内力时,允许采用相对刚度。 3. 设计结构断面时,需要经过一个试算过程。 4. 可通过改变杆件刚度达到调整内力状态目的。 ●温度和沉陷等变形因素的影响 1. 在超静定结构中,支座移动、温度改变、材料收缩、制造误差等因素都可以引起内力,即在无荷载下产生自内力。 2. 由上述因素引起的自内力,一般与各杆刚度的绝对值成正比。不应盲目增大结构截面尺寸,以期提高结构抵抗能力。 3. 预应力结构是主动利用自内力调节超静定结构内力的典型范例。 §4.2 力法原理 ●计算超静定结构的最基本方法 超静定结构是具有多余联系(约束)的静定结构,其反力和内力(归根结底是内力)不能或不能全部根据静力平衡条件确定。力法计算超静定结构的过程一般是在去掉多余联系的静定基本结构上进行,并选取多余力(也称赘余力)为基本未知量(其个数等于原结构的超静定次数)。根据基本体系应与原结构变形相同的位移条件建立方程,求解多余力后,原结构就转化为在荷载和多余力共同作用下的静定基本结构的计算问题。这里,基本体系起了从超静定到静定、从静定再到超静定的过渡作用,即把未知的超静定问题转换成已知的静定问题来解决。 ●基本结构的选择(解题技巧) 1. 通常选取静定结构;也可根据需要采用比原结构超静定次数低的、内力已知的超静定结构;甚至可取几何可变(但能维持平衡)的特殊基本结构。 2. 根据结构特点灵活选取,使力法方程中尽可能多的副系数δij = 0。 3. 应选易于绘制弯矩图或使弯矩图限于局部、并且便于图乘计算的基本结构。 4. 对称取基本结构;或利用对称性取半结构;或求弹性中心;以减少未知力数目,并使力法方程解耦。 ●力法典型方程 典型方程可写成矩阵形式: δX+ Δ = C (4.2.1) 式中,δ为柔度系数矩阵(对称方阵);X为多余未知力列阵;Δ为自由项列阵(外因作用下的广义位移列阵);C为原结构多余联系处的已知位移(不一定为零)列阵。 ●力法的解题步骤 1. 确定基本未知量,合理选取基本结构。 2. 根据多余联系处的位移(变形)协调条件,建立力法方程。
结构力学虚功原理最小势能原理解题示例
最小势能原理、虚功原理解题示例 最小势能原理:在给定外载荷的作用下,对于稳定平衡系统,在满足位移边界条件的所有各组位移中,实际位移使弹性系统的总势能最小。 例2.1如图2.1所示桁架结构,各杆的横截面积均为A ,弹性模量均为E ,在节点1处作用水平集中力P ,试用最小势能原理求各杆的内力。b5E2RGbCAP 图2.1 解:令在外力作用下,节点1在x 向的位移为x u ,在y 向的位移为 y u 。 则有: 杆应变能的表达式为: 2 2EA U L L = ?
则系统的总势能为: ()()()() 222220.60.80.4470.8942 2.52 2.2360.4470.8942 2.2360.1610.1920.486i x x y x y x y x x x y y x U Pu EA EA u u u u a a EA u u Pu a EA u u u u Pu a ∏=-=-+-??+---?=-+-∑ 由最小势能原理可知,当结构处于稳定平衡状态时,有: 0;0x y u u ?∏?∏ ==?? 即: ()()0.3230.19200.1920.9720x y x y EA u u P a EA u u a --=-+= 解得: 3.510.694x y Pa u EA Pa u EA == 杆的内力可由公式: EA N L L = ?求得,故各杆的内力为: 1213140.620.4250.979N P N P N P ---===- 例2.2如图2.2所示的梁,其上作用有均布载荷q ,试用最小势能原理求其挠度曲线。
图2.2 解:令梁的挠度函数为()x ω,它必须满足以下几个条件: 1、必须满足几何边界条件,但不一定满足平衡条件和力的边界条件; 2、由于有均布载荷q 的作用,故()x ω应为x 的4次多项式。 故,考虑到梁左侧为固支,可设: ()() 22012x x a a x a x ω=-- 梁右侧需满足: ()|0 x L x ω== 且梁右侧没承受弯矩,有: () 220 x L d x dx ω==<力的边界条件) 代入边界条件,有: ()342 120.60.4x x L a L x L L ω??=-+ ? ?? 等截面梁的弯曲应变能表达式为: 2 220 1 2L z d U EJ dx dx ω??= ??? ? 【根据平面假设,梁在受弯曲变形后,其横截面仍保持为平面,它一方面有挠度()x ω,一方面横截面在梁变形过程中旋转了一个角 度d dx ω ,由于该转角的存在,使得距离中性轴为 y 处的x 方向的位移
超静定结构的概念和超静定次数的确定
第5章力法 5.1 超静定结构的概念和超静定次数的确定 1. 超静定结构的概念 前面讨论的是静定结构,从本章开始我们讨论超静定结构的受力情况。关于结构的静定性可以从两个方面来定义从几何组成的角度来定义静定结构就是没有多余联系的几何不变体系;从受力的角度来定义,静定结构就是只用静力平衡方程就能求出全部反力和内力的结构。 现在,我们要讨论的是超静定结构。它同样可以从以上两个方面来定义,从几何组成的角度来定义,超静定结构就是具有多余联系的几何不变体系;从受力的角度来定义,超静定结构就是只用静力平衡方程不能求出全部的反力或内力的结构。如图5.1(a)所示的简支梁是静定的,当跨度增加时,其内力和变形都将迅速增加。为减少梁的内力和变形,在梁的中部增加一个支座,如图5.1(b)所示,从几何组成的角度分析,它就变成具有一个多余联系的结构。也正是由于这个多余联系的存在,使我们只用静力平衡方程就不能求出全部4个约束反力F ax、F ay、F by、F cy和全部内力。具有多余约束、仅用静力平衡条件不能求出全部支座反力或内力的结构称为超静定结构。图5.1(b)和图5.2所示的连续梁和刚架都是超静定结构。 图5.3给出了工程中常见的几种超静定梁、刚架、桁架、拱、组合结构和排架。本章讨论如何用力法计算这种类型的结构。 图5.1 图5.2 图5.3
2. 超静定次数的确定 力法是解超静定结构最基本的方法。用力法求解时,首先要确定结构的超静定次数。通常将多余联系的数目或多余未知力的数目称为超静定结构的超静定次数。如果一个超静定结构在去掉n个联系后变成静定结构,那么,这个结构就是n次超静定。 显然,我们可用去掉多余联系使原来的超静定结构(以后称原结构)变成静定结构的方法来确定结构的超静定次数。去掉多余联系的方式,通常有以下几种: (1) 去掉支座处的一根支杆或切断一根链杆,相当于去掉一个联系。如图5.4所示结构就是一次超静定结构。图中原结构的多余联系去掉后用未知力x1代替。 图5.4 (2) 去掉一个单铰,相当于去掉两个联系(图5.5) 图5.5 (3) 把刚性联结改成单铰联结,相当于去掉一个联系(图5.6)。 图5.6 (4) 在刚性联结处切断,相当于去掉三个联系(图5.7)。 应用上述去掉多余联系的基本方式,可以确定结构的超静定次数。应该指出,同一个超静定结构,可以采用不同方式去掉多余联系,如图 5.8(a)可以有三种不同的去约束方法,分别如图 5.8(b)、(c)、(d)所示。无论采用何种方式,原结构的超静定次数都是相同的。所以说去约束的方式不是惟一的。这里面所说的去掉“多余联系”(或“多余约束”),是以保证结构是几何不变体系为前提的。如图5.9(a)所示中的水平约束就不能去掉,因为它是使这个结构保持几何不变的“必要约束”(或“必要联系”)。如果去掉水平链杆(图5.9b),则原体系就变成几何可变了。
超静定结构解决思路
超静定结构 超静定结构 静定结构是没有多余约束的结构,结构体系中任何一个约束去掉后,结构都失去稳定性,成为机构,因而也就不能够继续承担荷载。因此,静定结构是相对危险的,任意约束失效后都会导致整体结构的失效。为了保证结构的安全性,需要对于静定结构增加约束,成为有多余约束的结构——超静定结构。 超静定结构有多余约束,当其中某个约束失效后,所承担的作用由其他约束承担,整体结构仍处于稳定状态,可以继续承担荷载,但是,超静定结构在失去部分或全部多余约束后,内力会出现重新分布的现象,是否破坏要重新计算。 超静定结构的思路 对于超静定结构,静定结构的解题思路是难以解决的:静定结构中无论是外力还是内力,均依靠力系平衡方程或方程组实现,但超静定结构的多余约束导致有效方程数少于未知数的数量。 因此,超静定问题宜从以下方面思考: 首先,如果结构整体是平衡的,结构内部任意组成部分、点、段落也一定是平衡的; 其次,对于任意多余约束是可以去掉的,并以相应的约束力来替代的,替代之后的结构各个部分依然平衡切除替代点外没有任何变化; 第三,结构中任意相临的、距离为0 的两点间的相对位移与转角均为0; 第四,弹性结构体系中,各个构件受力后产生的变形是协调的。 基于上面的基本思路,对于超静定结构常用的方法是力法与位移法。 力法 力法是计算超静定结构的基本方法,是利用结构的变形协调来实现的。 力法的基本思路是: 弹性结构体系中,各个构件受力后产生的变形是协调的; 除去多余约束后,以约束力替代原约束,并与结构等效;
除去约束后的结构在其上的外力系[P]的作用下,会产生各种变形,其中在除去约束后的原约束点的位移是:[Δ ] 结构原有的约束力也会导致结构在约束点的相关变形:[x][δ],[x]:除去的多余的约束,[δ]:当多余约束为 1 时的各个约束点变形。 但是在原结构中,被除去的多余约束点由于约束的作用,其相应的位移为0,因此有: [x][δ] +[Δp] =0 如果设多余约束为n个,则力法线性方程组为: x1δ11 + x2δ12 + x3δ13+…… + x nδ1n +Δ1p = 0 x2δ21 + x2δ22 + x3δ23+…… + x nδ2n +Δ2p = 0 x3δ31 + x2δ32 + x3δ33+…… + x nδ3n +Δ3p = 0 …… …… …… …… …… …… …… …… …… x nδn1 + x2δn2 + x3δn3+…… + x nδnn +Δnp = 0 其中:x i:第i个多余约束所形成约束反力,是 未知数; δij:如果第j个多余约束位置上,作用有与该多余约束性质相同的单位力,所形成的位于第i 个约束反力位置上的变形量; x iδij:第j个多余约束所形成约束力,导致的位于第i个约束反力位置上的变形量; Δip:除去多余约束后,结构外荷载系产生的,位于第i 个约束反力位置上的变形量; 根据虚功原理,可以求得δij,且根据互等定理,δij = δji ;同样,根据虚功原理也可以求得Δip,因此方程组是可解的; 求解出x1,x2,x3…… x n后,可将其视为与外荷载系共同作用于除去多余约束的静定结构 的荷载,随即可以求解并绘制相应的静定结构的内力图,进而求出最大内力截面与最大应力的位 置与量值,进行相关校核。
结构力学 静定结构的受力分析
第1节 静定平面桁架 一、桁架的内力计算方法 1、结点法 取结点为隔离体,建立平衡方程求解的方法,每个结点最多只能含有两个未知力。该法最适用于计算简单桁架。 根据结点法,可以得出一些结点平衡的特殊情况,能使计算简化: (1)两杆交于一点,若结点无荷载,则两杆的内力都为零(图2-2-1a )。 (2)三杆交于一点,其中两杆共线,若结点无荷载,则第三杆是零杆,而共线的两杆内力大小相等,且性质相同(同为拉力或压力)(图2-2-1b)。 (3)四杆交于一点,其中两两共线,若结点无荷载,则在同一直线上的两杆内力大小相等,且性质相同(图2-2-1c )。推论,若将其中一杆换成力F P ,则与F P 在同一直线上的杆的内力大小为F P ,性质与F P 相同(图2-2-1d )。 F N3 F N3=0 F N1=F N2=0 F N3=F N4(a) (b)(c)F N4 (d)F N3=F P F P N1F F N2 F N1 F N2 F N1 F N2 F N1 F N2 F N3 F N3 F N1=F N2,F N1=F N2, F N1=F N2, 图2-2-1 (4)对称结构在正对称荷载作用下,对称轴处的“K ”型结点若无外荷载作用,则斜杆为零杆。例如 图2-2-2所示对称轴处与A 点相连的斜杆1、2都是零杆。 1A 2 F P F P A F P F P B F P F P B A (b)(a) X =0 图2-2-2 图2-2-3 (5)对称结构在反对称荷载作用下,对称轴处正对称的未知力为零。如图2-2-3a 中AB 杆为零杆,因为若将结构从对称轴处截断,则AB 杆的力是一组正对称的未知力,根据上述结论可得。 (6)对称结构在反对称荷载作用下,对称轴处的竖杆为零杆。如图2-2-4a 中AB 杆和B 支座的反力均为零。其中的道理可以这样理解:将图a 结构取左右两个半结构分析,对中间的杆AB 和支座B 的力,若左半部分为正,则根据反对称,右半部分必定为相同大小的负值,将半结构叠加还原回原结构后正负号叠加,结果即为零。 0B F P F P F P F P B - A' B' A - A (a) (b) 图2-2-4 2、截面法 截面法取出的隔离体包含两个以上的结点,隔离体上的外力与内力构成平面一般力系,建立三个平衡方程求解。该法一般用于计算联合桁架,也可用于简单桁架中少数杆件的计算。 在用截面法计算时,充分利用截面单杆,也能使计算得到简化。 截面单杆的概念:在被某个截面所截的内力为未知的各杆中,除某一杆外其余各杆都交于一点(或彼此平行),则此杆称为截面单杆。截面单杆的内力可从本截面相应隔离体的平衡条件直接求出。 截面单杆可分为两种情况: (1)截面只截断三根杆,且此三根杆不交于一点,则其中每一杆都是截面单杆。计算时,对其中两杆的交点取矩,建立力矩平衡方程,就可求出第三杆的轴力,如图2-2-5(a )中,CD 、AD 、AB 杆都
同济大学朱慈勉 结构力学 第9章超静定结构的实用计算方法与概念分析习题答案
9-1 同济大学朱慈勉 结构力学 第9章超静定结构的实用计算方法与概 念分析习题答案 9-1 试说出何为杆端转动刚度、弯矩分配系数和传递系数,为什么弯矩分配法一般只能用于无结点线位移的梁和刚架计算。 9-2 试用弯矩分配法计算图示梁和刚架,作出M 图,并求刚结点B 的转角φB 。 解:设EI=6,则5.1,1==B C A B i i 53.05 .13145.1347 .05 .13141 4=?+??==?+??=B C B A μμ 结点 A B C 杆端 AB BA BC 分配系数 固端 0.47 0.53 绞支 固端弯矩 -60 60 -30 0 分配传递 -7.05 -14.1 -15.9 0 最后弯矩 -67.05 45.9 -45.9 ()()() 逆时针方向215.216005.6721609.4522131m KN EI EI m M m M i AB AB BA BA B ?-=?? ? ???+---= ? ? ? ???---=θ (b) 解:设EI=9,则 9m 9m 6m 3m 3m 2m 6m 2m
9-2 3 ,31,1====B E B D B C A B i i i i 12.01 41333331 316.01 41333331 436 .0141333333 3=?+?+?+??==?+?+?+??==?+?+?+??==B C B A B E B D μμμμ 结点 A B C 杆端 AB BA BC B D B E 分配系数 固端 0.16 0.12 0.36 0.36 绞支 固端弯矩 0 0 0 45 -90 0 分配传递 3.6 7.2 5.4 16.2 16.2 0 最后弯矩 3.6 7.2 5.4 61.2 -73.8 ()()()顺时针方向22.1606.32102.732131m KN EI EI m M m M i AB AB BA BA B ?=?? ? ???---= ? ? ? ???---=θ 9-3 试用弯矩分配法计算图示刚架,并作出M 图。 (a) 解:B为角位移节点 设EI=8,则1==B C A B i i ,5.0= =B C B A μμ 固端弯矩()m KN l b l Pab M B A ?=????=+= 488212 443222 2 m KN l M B C ?-=?+-=582621 892 结点力偶直接分配时不变号 结点 A B C 杆端 AB BA BC 分配系数 铰接 0.5 0.5 固端弯矩 48 -58 12 4m 4m 8m 2m
结构力学习题集(含答案)
结构力学-习题集(含答案) 《结构力学》课程习题集 西南科技大学成人、网络教育学院版权所有 习题 【说明】:本课程《结构力学》(编号为06014)共有单选题,判断题,计算题1,计算题2,计算题3,计算题4,几何构造分析等多种试题类型,其中,本习题集中有[计算题4]等试题类型未进入。 一、单选题 1.弯矩图肯定发生突变的截面是()。 A.有集中力作用的截面; B.剪力为零的截面; C.荷载为零的截面; D.有集中力偶作用的截面。 2.图示梁中C截面的弯矩是()。 4m2m 4m A.12kN.m(下拉); B.3kN.m(上拉); C.8kN.m(下拉); D.11kN.m(下拉)。 3.静定结构有变温时,()。 A.无变形,无位移,无内力; B.有变形,有位移,有内力; C.有变形,有位移,无内力; D.无变形,有位移,无内力。 4.图示桁架a杆的内力是()。 A.2P; B.-2P; C.3P; D.-3P。 5.图示桁架,各杆EA为常数,除支座链杆外,零杆数为()。
结构力学-习题集(含答案) A.四根; B.二根; C.一根; D.零根。 P a l = a P P P 6 6. 图示梁A 点的竖向位移为(向下为正)( )。 A.)24/(3EI Pl ; B.)16/(3EI Pl ; C.)96/(53EI Pl ; D.)48/(53EI Pl 。 P EI EI A l/l/22 2 7. 静定结构的内力计算与( )。 A.EI 无关; B.EI 相对值有关; C.EI 绝对值有关; D.E 无关,I 有关。 8. 图示桁架,零杆的数目为:( )。 A.5; B.10; C.15; D.20。 9. 图示结构的零杆数目为( )。 A.5; B.6; C.7; D.8。 10. 图示两结构及其受力状态,它们的内力符合( )。 A.弯矩相同,剪力不同; B.弯矩相同,轴力不同; C.弯矩不同,剪力相同; D.弯矩不同,轴力不同。
第七章 超静定结构
第七章超静定结构 授课学时:6学时 一、内容提要 1、理解超静定结构中的一些基本概念,即:静定与超静定、超静定次数、多余约束、超静定系统(结构)、 基本静定系以及相当系统等。 2、熟练掌握用力法求解超静定结构。 3、掌握对称与反对称性质并能熟练应用这些性质求解超静定结构。 4、了解连续梁的概念以及三弯矩方程。 二、基本内容 1、超静定系统中的一些基本概念 超静定结构或系统:用静力学平衡方程无法确定全部约束力和内力的结构或结构系统。 静定结构或系统:无多余联系的几何不变的承载结构系统,其全部约束反力与内力都可由静力平衡方程求出的机构或结构系统。 多余约束:在无多余联系的几何不变的静定系统上增加约束或联系。 外超静定:超静定结构的外部约束反力不能全由静力平衡方程求出的情况。 内超静定:超静定结构内部约束(或联系)形成的内力不能单由静力平衡方程求出的情况。 混合超静定结构:对于内、外超静定兼而有之的结构。 基本静定系:解除超静定结构的某些约束后得到静定结构,称为原超静定结构的基本静定系(简称为静定基)。静定基的选择可根据方便来选取,同一问题可以有不同选择。 相当系统:在静定基上加上外载荷以及多余约束力的系统称为静不定问题的相当系统。 超静定次数:超静定结构的所有未知约束反力和内力的总数与结构所能提供的独立的静力平衡方程数之差。 2、力法与正则方程 力法:以多余约束力为基本未知量,将变形或位移表示为未知力的函数,通过变形协调条件作为补充方程求来解未知约束力,这种方法称为力法,又叫柔度法。 应用力法求解超静定问题的步骤: 1)根据问题,确定其是静定还是超静定问题,如为后者,则确定超静定次数。 2)确定哪些约束是多余约束,分析可供选择的基本静定系,并注意利用对称性,反对称性,选定合适的静定系统,在静定系上加上外力和多余约束力,形成相当系统。
结构力学作业答案
[0729]《结构力学》 1、桁架计算的结点法所选分离体包含几个结点 A. 单个 2、固定铰支座有几个约束反力分量 B. 2个 3、从一个无多余约束的几何不变体系上去除二元体后得到的新体系是 A. 无多余约束的几何不变体系 4、两刚片用三根延长线交于一点的链杆相连组成 A. 瞬变体系 5、定向滑动支座有几个约束反力分量 B. 2个 6、结构的刚度是指 C. 结构抵抗变形的能力 7、桁架计算的截面法所选分离体包含几个结点 B. 最少两个 8、对结构进行强度计算的目的,是为了保证结构 A. 既经济又安全 9、可动铰支座有几个约束反力分量 A. 1个 10、固定支座(固定端)有几个约束反力分量 C. 3个 11、改变荷载值的大小,三铰拱的合理拱轴线不变。 A.√ 12、多余约束是体系中不需要的约束。 B.× 13、复铰是连接三个或三个以上刚片的铰 A.√ 14、结构发生了变形必然会引起位移,结构有位移必然有变形发生。 B.×
15、如果梁的截面刚度是截面位置的函数,则它的位移不能用图乘法计算。 A.√ 16、一根连杆相当于一个约束。 A.√ 17、单铰是联接两个刚片的铰。 A.√ 18、连接四个刚片的复铰相当于四个约束。 B.× 19、虚功原理中的力状态和位移状态都是虚设的。 B.× 20、带拉杆三铰拱中拉杆的拉力等于无拉杆三铰拱的水平推力。 A.√ 21、瞬变体系在很小的荷载作用下会产生很大的内力,所以不能作为结构使用。 A.√ 22、一个无铰封闭框有三个多余约束。 A.√ 23、三铰拱的水平推力不仅与三铰的位置有关,还与拱轴线的形状有关。 B.× 24、三铰拱的主要受力特点是:在竖向荷载作用下产生水平反力。 A.√ 25、两根链杆的约束作用相当于一个单铰。 B.× 26、不能用图乘法求三铰拱的位移。 A.√ 27、零杆不受力,所以它是桁架中不需要的杆,可以撤除。 B.× 28、用图乘法可以求等刚度直杆体系的位移。 A.√ 29、连接四个刚片的复铰相当于四个约束。
超静定结构分析
超静定结构的分析与求解 姓名李海龙专业土木工程年级2008级 摘要:本篇文章简要分析了超静定结构的判定方法和解决好景顶结构的基本方法—力法、位移法、力矩分配法。通过自由度判定超静定结构的次数,是桥梁中解决高次超静定的基本方法。文章主要分析各种方法解决超静定问题的步骤和需要注意的一些方面。关键词:超静定结构的分析力法位移法力矩分配法 Abstract:this article briefly analyzes the super statically determinate structure determination methods and solve the basic methods of Hualien roof structure -- force method, displacement method, torque distribution method. Through the freedom of judge super statically determinate structure solved in times of high times bridge is the basic methods of super quiescent set. The paper mainly analyses various methods to solve problems super quiescent steps and set some of the aspects of the needs attention. Keywords:super statically determinate structure analysis Force method Displacement method Torque distribution method 1 超静定结构分析 1.1超静定结构的判定 1.1.1自由度判定具有多余约束的结构称为超静定结构。结构具有多余约束的个数,即为超静定次数。多余约束可以是外部或内部的也可二者兼有。因而就有外部超静定,内部超静和内外部超静定结构之分。要快速准确判定结构超静次数必须注意以下几点:1.无论是梁式结构、框架(刚架)结构还是桁架结构都可以首先利用计算自由度公式大概判定结构可能的几何组成形式:W=3m-(2n+r)公式中:W:结构体系计算自由度数。m:结构体系刚片数(除地基这一特殊刚片外)。n:结构体系刚片与刚片之间连接铰数(复铰应换算成单铰),r:结构体系与地基相连的链杆数。①
结构力学静定结构与超静定结构建筑类
结构力学静定结构与超静定结构建筑类 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】
1、静定与超静定结构的概念:无多余约束的几何不变体系是静定结构 静定结构:由静力平衡方程可求出所有内力和约束力的体系 有多余约束的几何不变体系是超静定结构 超静定结构:由静力平衡方程不能求出所有内力和约束力的体系. 瞬变体系不能作为结构:瞬变体系的主要特性为: 1.可发生微量位移,但不能继续运动 2.在变形位置上会产生很大内力 3.在原位置上,一般外力不能平衡 4.在特定荷载下,可以平衡,会产生静不定力 5.可产生初内力. 常变体系是一种机构而不是结构 2、静定结构的内力分析方法 几何特性:无多余联系的几何不变体系 静力特征:仅由静力平衡条件可求全部反力内力 求解一般原则:从几何组成入手,选择合适的隔 离体,使得一个隔离体上未知力的个数不超过三个,如果力系为平面汇交力系,则不应超过两个。一般按照几何组成的相反顺序分析。 一、单跨梁的内力分析 弯矩、剪力、荷载集度之间的微分关系 1.无荷载分布段(q=0),Q图为水平线,M图为斜直线。 2.均布荷载段(q=常数),Q图为斜直线,M图为抛物线,且凸向与荷载指向相同。 3.集中力作用处,Q图有突变,且突变量等于力值; M图有尖点,且指向与荷载相同。
4.集中力偶作用处,M图有突变,且突变量等于力偶值; Q图无变化。 内力计算的关键在于:正确区分基本 部分和附属部分. 熟练掌握单跨梁的 计算. 单体刚架(联合结构)的支座反力(约 束力)计算 方法:切断约束,取一个刚片为隔离 体,假定约束力的方向,由隔离体的平衡建立三个平衡方程。 四.刚架弯矩图的绘制做法:拆成单个杆,求出杆两端的弯矩,按与单跨梁相同的方法画弯矩图. 分段定点连线 六.由做出的剪力图作轴力图 做法: 逐个杆作轴力图,利用结点的平衡条件,由已知的杆端剪力和求杆端轴力,再由杆端轴力画轴力图.注意:轴力图画在杆件那一侧均可,必须注明符号和控制点竖标.
结构力学-虚功原理、最小势能原理解题示例
最小势能原理、虚功原理解题示例 最小势能原理:在给定外载荷的作用下,对于稳定平衡系统,在满足位移边界条件的所有各组位移中,实际位移使弹性系统的总势能最小。 例2.1 如图2.1所示桁架结构,各杆的横截面积均为A ,弹性模量均为E ,在节点1处作用水平集中力P ,试用最小势能原理求各杆的内力。 图2.1 解:令在外力作用下,节点1在x 向的位移为x u ,在y 向的位移为y u 。 则有: 2 2EA U L L = ? 则系统的总势能为:
()()()() 222220.60.80.4470.8942 2.52 2.2360.4470.8942 2.2360.1610.1920.486i x x y x y x y x x x y y x U Pu EA EA u u u u a a EA u u Pu a EA u u u u Pu a ∏=-= -+-??+---?=-+-∑ 由最小势能原理可知,当结构处于稳定平衡状态时,有: 0;0x y u u ?∏?∏ ==?? 即: ()()0.3230.19200.1920.9720x y x y EA u u P a EA u u a --=-+= 解得: 3.510.694x y Pa u EA Pa u EA = = 杆的内力可由公式:EA N L L = ?求得,故各杆的内力为: 1213140.620.4250.979N P N P N P ---===- 例2.2 如图2.2所示的梁,其上作用有均布载荷q ,试用最小势能原理求其挠度曲线。 图2.2 解:令梁的挠度函数为()x ω,它必须满足以下几个条件:
1、静定结构与超静定结构静力计算公式
静定结构与超静定结构静力常用计算公式 一、短柱、长柱压应力极限荷载计算公式 1、短柱压应力计算公式 荷载作用点 轴方向荷载 A F = σ bh F = σ 偏心荷载 ) 1(2 1x Y i ye A F W M A F - = -= σ )1(2 2 x Y i ye A F W M A F + =+ =σ )61(2,1h e bh F ± = σ 偏心荷载 ) 1(2 2x y y x x x y Y i ye i xe A F I x M I x M A F ± ±= ?± ?± = σ ) 661(b e h e bh F y x ± ± = σ 长短柱分界点如何界定? 2、长柱方程式及极限荷载计算公式 支座形式 图 示 方 程 式 极限荷载 一般式 n=1 两端铰支 β=1 y a dx y d ?=2 2 2 ax B ax A y sin cos += y F M EI F a ?== ,2 EI l n 2 2 2 π EI l 2 2π 一端自由他端固定 β=2 y a dx y d ?=2 2 2 ax B ax A y sin cos += EI l n 2 2 24)12(π - EI l 2 24π
y F M EI F a ?== ,2 两端固定 β=0.5 )(2 2 =- +F M y a dx y d A F M ax B ax A y A + +=sin cos A M y F M EI F a +?-== ,2 EI l 2 2 4π EI l 2 2 4π 一端铰支他端固定 β=0.75 )(2 2 2 x l EI Q y a dx y d -= ?+ ) (sin cos x l F Q ax B ax A y -+ +=水平荷载 -= Q EI F a ,2 —— EI l 2 2 7778.1π 注:压杆稳定临界承载能力计算公式:EI l P cr 2 2) (βπ = 二、单跨梁的反力、剪力、弯矩、挠度计算公式 1、简支梁的反力、剪力、弯矩、挠度计算公式 荷载形式 M 图 V 图 反力 2 F R R B A = = L Fb R A = L Fa R B = 2 qL R R B A = = 4 qL R R B A = = 剪力 V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B
结构力学影响线试题答案知识讲解
结构力学影响线试题 答案
8影响线 判断题: 1、影响线仅应用在移动荷载作用下的内力计算问题中,而不能应用在恒载作用下的内力计算问题。( )答案:错 2、静定梁任一截面C的剪力影响线在截面C左、右的两线段总是互相平行的。( )答案:错 4、结构各截面弯矩影响线的最大竖标和最小竖标分别相连,即构成该结构的弯矩包络图。( )答案:错 7、内力影响线与内力图的不同之处仅在于内力影响线竖标与内力图竖标的量纲不同。()答案:错 二、填空: 2、用静力法作影响线的基本方法可分为两大步骤:________________;________________。答案:列影响线方程、根据列影响线方程作图 3、影响线的主要用途有(1)________________;(2)________________。答案:确定最不利荷载位值计算内力、反力 5、计算结构位移时可利用____影响线。答案:位移 6、临界荷载是指____________________________。答案:使判别式变号的集中荷载
7、最不利荷载位置是指_________________________。答案:使某指定量值取最大值时的荷载位置 9、静定结构的内力影响线一般由_____线段构成。答案:直 10、移动集中荷载组的某种布置状态使某量Z取极大值时,则该布置状态成为____________。答案:最不利荷载位置 11、作弯矩包络图时要取_______个截面计算该截面弯矩最大(小)值,不需取大量截面计算。答案:有限 12、绝对最大弯矩的是指:____________________。答案:所有最大弯矩中数值最大的弯矩值 13、简支梁的绝对最大弯矩的值一般与跨中截面最大弯矩______,且发生在靠近______截面处。答案:值相差不大、跨中点 三、选择: 1、结构某一内力影响线将____而改变。(A)随实际荷载的变化 (B)不随实际荷载的变化(C)因坐标系的不同选择答案:B 2、用机动法作影响线的方法建立在____基础上。 (A)叠加原理 (B)静力平衡 (C)虚功原理答案:C 3、单位荷载P=1在BC上移动时,弯矩MDE的最大值为____。 (A)1.2Pa(左拉) (B)Pa(右拉) (C)2.8Pa(左拉)答案:A 4、计算绝对最大弯矩的公式中,a为____与____作用线之间的距离。答案:临界荷载、杆上荷载合力 9虚功原理和结构的位移计算 一、判断题:
超静定结构的受力分析及特性超静定结构的特征及超静定
第四节超静定结构的受力分析及特性 一、超静定结构的特征及超静定次数 超静定结构的几何特征是除了保证结构的几何不变性所必须的约束外,还存在多余约束。 超静定结构的静力特征是仅由静力平衡条件不能唯一地确定全部未知反力和内力。 结构的多余约束数或用静力平衡条件计算全部未知反力和内力时所缺少的方程数称为结构的超静定次数。 通常采用去除多余约束的方法来确定结构的超静定次数。即去除结构的全部多余约束,使之成为无多余约束的几何不变体系,这时所去除的约束数就是结构的超静定次数。 去除约束的方法有以下几种: (一)切断一根两端铰接的直杆(或支座链杆),相当于去除一个约束。 (二)切断一根两端刚接的杆件,相当于去除三个约束。 (三)切断——个单铰(或支座固定铰),相当于去除二个约束;切断一个复铰(连接n根杆件的铰),相当于去除2(n—1)个约束。 (四)将单刚结点改为单铰节点,相当于去除一个约束;将连接n个杆件的复刚节点改为复铰节点,相当于去除n—1个约束。 去除一个超静定结构多余约束的方法可能有几种,但不管采用哪种方法,所得超静定次数一定相同。 去除图4—1a所示超静定结构的多余约束的方法之一如图4—1b所示,去除六个多余约束后,就成为静定结构,故为超静定六次。再用其他去除多余约束的方案确定其超静定次数,结果是相同的。 (a)(b) 图4-1
二、力法的基本原理 (一)力法基本结构和基本体系 去除超静定结构的多余约束,代以相应的未知力X i (i=1、2、…、n),X i 称为多余未知力或基本未知力,其方向可以任意假定。去除多余约束后的结构称为力法基本结构。力法基本结构在各多余未知力、外荷载(有时还有温度变化、支座位移等)共同作用下的体系称为力法基本体系,它是用力法计算超静定结构的基础。 选取力法基本结构应注意下面两点: 1.基本结构一般为静定结构,即无多余约束的几何不变体系。有时当简单超静定结构的解为已知时,也可以将它作为复杂超静定结构的基本结构,以简化计算。 2.选取的基本结构应使力法典型方程中的系数和自由项的计算尽可能简便,并尽量使较多的副系数和自由项等于零。
第四节 超静定结构得受力分析及特性
第四节超静定结构得受力分析及特性 一、超静定结构得特征及超静定次数 超静定结构得几何特征就是除了保证结构得几何不变性所必须得约束外,还存在多余约束。 超静定结构得静力特征就是仅由静力平衡条件不能唯一地确定全部未知反力与内力。 结构得多余约束数或用静力平衡条件计算全部未知反力与内力时所缺少得方程数称为结构得超静定次数。 通常采用去除多余约束得方法来确定结构得超静定次数。即去除结构得全部多余约束,使之成为无多余约束得几何不变体系,这时所去除得约束数就就是结构得超静定次数。 去除约束得方法有以下几种: (一)切断一根两端铰接得直杆(或支座链杆),相当于去除一个约束。 (二)切断一根两端刚接得杆件,相当于去除三个约束。 (三)切断——个单铰(或支座固定铰),相当于去除二个约束;切断一个复铰(连接n根杆件得铰),相当于去除2(n—1)个约束。 (四)将单刚结点改为单铰节点,相当于去除一个约束;将连接n个杆件得复刚节点改为复铰节点,相当于去除n—1个约束。 去除一个超静定结构多余约束得方法可能有几种,但不管采用哪种方法,所得超静定次数一定相同。 去除图4—1a所示超静定结构得多余约束得方法之一如图4—1b所示,去除六个多余约束后,就成为静定结构,故为超静定六次。再用其她去除多余约束得方案确定其超静定次数,结果就是相同得。 (a)(b)
图4-1 二、力法得基本原理 (一)力法基本结构与基本体系 去除超静定结构得多余约束,代以相应得未知力X i (i=1、2、…、n),X i 称为多余未知力或基本未知力,其方向可以任意假定。去除多余约束后得结构称为力法基本结构。力法基本结构在各多余未知力、外荷载(有时还有温度变化、支座位移等)共同作用下得体系称为力法基本体系,它就是用力法计算超静定结构得基础。 选取力法基本结构应注意下面两点: 1.基本结构一般为静定结构,即无多余约束得几何不变体系。有时当简单超静定结构得解为已知时,也可以将它作为复杂超静定结构得基本结构,以简化计算。 2.选取得基本结构应使力法典型方程中得系数与自由项得计算尽可能简便,并尽量使较多得副系数与自由项等于零。