通信程序课程设计-PC机双机串行通信
串行通信程序课程设计
本串行通信程序利用汇编语言通过BIOS中断调用和DOS功能调用实现PC机双机串行通信。其中,上位机和下位机串行口均为辅串口COM2(口地址为2FXH),对外用9针连接器与令一台PC机连接;BIOS通过“INT 14H”4个中断服务子程序,分别完成串口初始化编程、发送一帧数据、接受一帧数据以及测试通信线状态。本程序分为PC机串口自动测试程序(目的是测试串口好坏)和PC机全双工双机通信程序两个部分。
一. PC机串口自动测试
对PC机主串口进行外环自动测试,要求:
(1)调用BIOS通信软件,采用查询方式编程,将下列测试电文10行由主串口发出,经外环连接线再由主串口接受送屏幕显示。测试电文如下:
THE QUICK BROWN FOX JUMPS OVER LAZY DOG
(2)通信速率为1200波特,一帧字符有8个数据位,1个停止位,无校验。
1. 设计思路
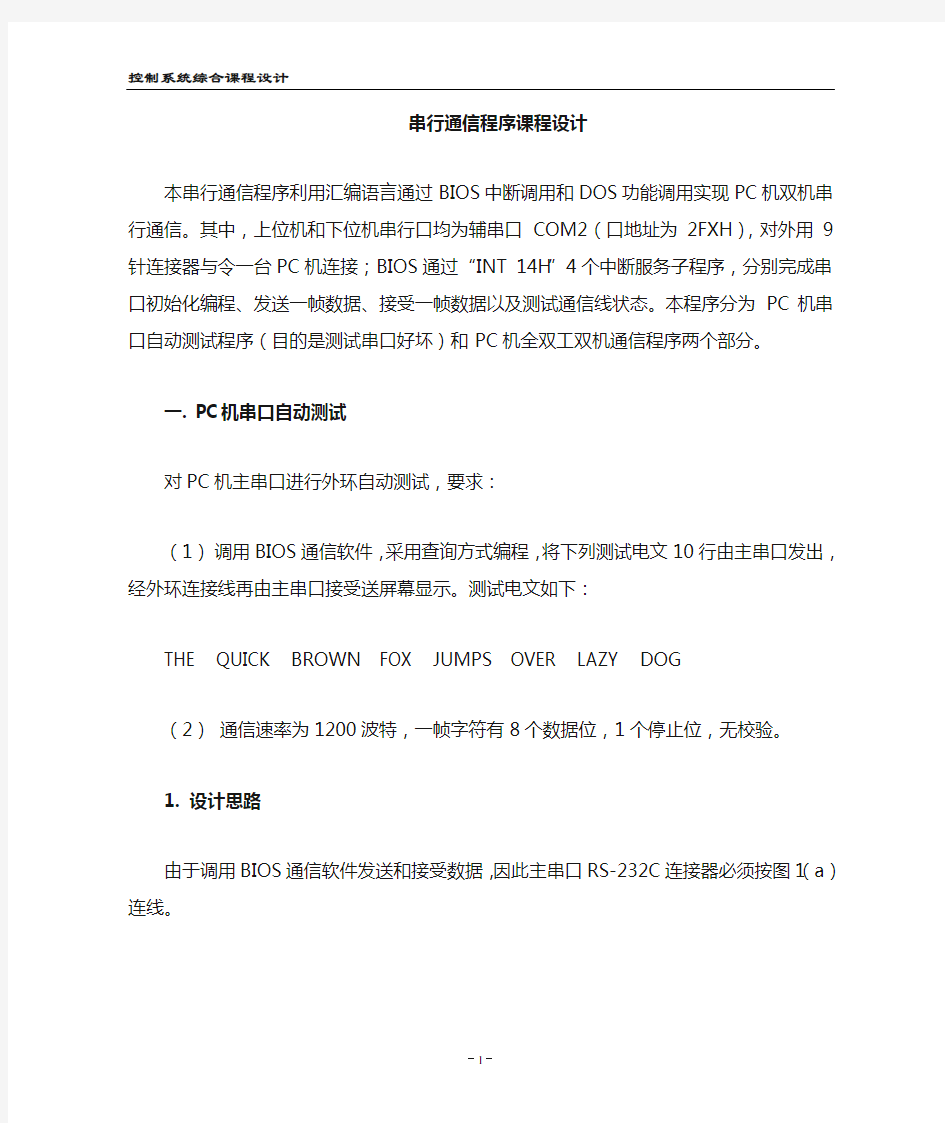
由于调用BIOS通信软件发送和接受数据,因此主串口RS-232C连接器必须按图1(a)连线。
(a)有联络线自发自收(b)有联络线全双工通信
图 1 串行通信RS-232C连接器连线方式
测试电文译为:狡猾的褐色狐狸越过懒狗的背。它是国际电报通信常用的测试电文,电文包含了26个字母,又称狐狸电文。在一条报路上长时间的循环发送这条电文,接收方统计在一定时间内的差错率,即可知道报路的通信质量。
2. 程序框图
程序框图如图2所示。
图 2 PC机串口自动测试程序框图
3. 程序清单
DATA SEGMENT
TEXT DB ‘THE QUICK BROWN FOX JUMPS OVER LAZY DOG’,0DH,0AH LLL EQU $-TEXT
ERROR DB ‘COM2 BAD!’,0DH,0AH, ‘$’
DATA ENDS
;--------------------------------------------------------------------------------------------------------------------- CODE SEGMENT
ASSUME CS: CODE, DS: DA TA
BEG: MOV AX, DATA
MOV DS, AX
CALL I8250 ;辅串口初始化
MOV CH,10 ;电文行数送CH
AGAIN: MOV CL,LLL ;电文长度送CL
MOV BX, OFFSET TEXT
SEND: MOV AL, [BX] ;取数据
MOV AH, 1 ;BIOS调用
MOV DX, 1
INT 14H ;发送一个数据
TEST AH, 80H ;发送成功否?
JNZ DISPERR ;否,转出错处理RECEIVE: MOV AH, 2 ;BIOS调用
MOV DX, 1
INT 14H ;接受一个数据
TEST AH, 80H ;接受成功否?
JNZ DISPERR ;否,转出错处理
DISP: MOV AH, 2
MOV DL, AL
INT 21H ;接受字符送屏幕显示
INC BX
DEC CL ;电文长度计数
JNZ SEND
DEC CH ;行计数
JNZ AGAIN
JMP EXIT
DISPERR: MOV AH, 9
MOV DX, OFFSET ERROR
INT 21H ;显示出错信息
EXIT: MOV AH, 4CH
INT 21H ;返回DOS
;---------------------------------------------------------------------------
I8250 PROC
MOV AX, 0083H ;波特率1200,无校验,8位
MOV DX, 1 ;使用辅串口
INT 14H
RET
I8250 ENDP
CODE ENDS
END BEG
如果辅串口是好的,程序执行后自动屏显10行测试电文,否则将屏显“COM2 BAD!”。
二. PC机全双工双机通信
利用汇编语言进行编程,实现两台计算机间数据的异步串行发送和接受,要求:
(1)上位机接收键盘输入的a、b两个参数,将参数的值通过计算机的串行口传输到下
位机,同时接受下位机的计算结果;下位机接受到a、b值后,计算y = ax+b,同时将结果传输到上位机。
(2)上位机在线修改a、b的值,下位机能随之相应。
(3)界面能够清晰的反映操作步骤和操作结果。
1. 设计思路
(1)数据发送采用查询方式,数据接受采用中断方式,对端口直接操作编写通信程序。(2)上位机传输a、b两个参数时,回车后方为有效参数。
(3)Esc为通信结束字符,当双方都键入Esc的时候结束通信,各自返回DOS。通信结束时,双方不可能同时按下Esc键,必然是有先有后,反送方必须保证通信字符能够完整的传送到对方,这些都必须在程序中考虑进去。
(4)通信速率2400波特,一帧字符有8个数据位,1个停止位,无校验。
2. 程序框图
程序框图如图3所示。
图 3 PC机全双工双机通信从机程序框图
3. 从机程序清单
DISP ACRO V AR
MOV AH, 9
MOV DX, OFFSET VAR
INT 21H
ENDM
;---------------------------------------------------------------------------
DATA SEGMENT
0LD0B DD ?
MESG1 DB ‘Please wait a minute…’, 0DH, 0AH, ‘$’
MESG2 DB ‘Communication line bad!’, 0DH, 0AH, ‘$’
MESG3 DB ‘Ok!’, 0DH, 0AH, ‘$’
TTT DD 1000000
DATA ENDS
;---------------------------------------------------------------------------
CODE SEGMENT
BUF DB ?
ASSUME S: CODE, DS: DA TA
BEG MOV AX, DATA
MOV DS, AX
CLI
CALL I8250 ;8250初始化
CALL I8259 ;开放辅串口中断
CALL RW0B ;置换0BH型中断向量
STI
MOV SI, 10
AGA: DISP MESG1 ;显示等待信息
MOV DX, 2FEH ;读MODEM状态寄存器
IN AL, DX
AND AL, 00110000B
CMP AL,30H ;DSR、C T S引脚为逻辑0?
JE OK ;联络成功,转OK
CALL DELAY ;延时1s
DEC SI
JNZ AGA
DISP MESG2 ;显示通信线路坏
JMP RETURN
OK: DISP MESG3 ;显示OK
SCANT: MOV DX, 2FDH ;读通信线状态寄存器IN AL, DX
TEST AL, 20H ;发送保持寄存器空闲否?
JZ SCANT ;否,转SCANT
MOV AH, 1
INT 16H ;有键入否?
JZ SCANT ;否,转SCANT
MOV AH, 0
INT 16H ;取键入字符x的ASCII送AL
SUB AL, 60H ;将x变换为十六进制数
MUL CL ;计算a*x
ADD AL, CH ;计算y=ax+b
ADC AX, 3030H ;将y变换为ASCII码
MOV DX, 2F8H
OUT DX, AL ;发送y的低字节
MOV AL, AH
OUT DX, AL ;发送y的高字节
CMP AL, 1BH ;是Esc否?
JNZ SCANT ;否,转SCANT
WWW: MOV DX, 2FDH
IN AL, DX ;读通信状态寄存器
TEST AL, 40H ;发送移位寄存器是否为空?
JZ WWW ;否,转WWW
LAST: CMP CS: BUF, 1BH ;受到对方Esc否?
JNZ LAST ;否,转LAST
RETURN: CALL RESET
MOV AH, 4CH
INT 21H
;-------------------------------------------------------------------------
RECEIVE PROC
PUSH AX ;保护现场
PUSH DX ;保护现场
MOV DX, 2F8H
IN AL, DX ;接受数据
MOV CX: BUF, AL ;送BUF单元保存
NEXT: MOV AH, 0EH
INT 10H ;屏幕显示
CMP AL, 0DH ;是否回车?
JNE EXIT ;否,转EXIT
MOV CH, CL ;是,参数a、b顺次
MOV CL, AL ;存入CL、CH
MOV AL, 0AH
INT 10H ;补送换行
EXIT: MOV AH, 20H ;中断结束命令
OUT 20H, AL ;送8259命令寄存器
POP DX ;恢复现场
POP AX ;恢复现场
IRET ;中断返回
RECEIVE ENDP
;--------------------------------------------------------------------------
I8250 PROC
MOV AX, 00A3H
MOV DX, 1
INT 14H
MOV DX, 2F9H
MOV AL, 01H
OUT DX, AL ;允许接收中断
MOV DX, 2FCH
MOV AL, 00001011B
OUT DX, AL ;令RTS、D TR端为逻辑0
RET
I8250 ENDP
;---------------------------------------------------------------------------
I8259 PROC ;开放辅串口中断
IN AL, 21H
AND AL, 11110111B
OUT 21H, AL
RET
I8259 ENDP
;-----------------------------------------------------------------------------
RW0B PROC ;置换0BH型中断向量MOV AX, 350HBH
INT 21H
MOV WORD PTR 0LD0B, BX
MOV WORD PTR 0LD0B+2, ES
PUSH DS
MOV AX, CODE
MOV DS, AX
MOV DX, OFFSET RECEIVE
MOV AX, 250BH
INT 21H
POP DS
RET
RW0B ENDP
;------------------------------------------------------------------------------
RESET PROC ;恢复0BH型中断向量MOV DX, WORD PTR 0LD0B
MOV DS, WORD PTR 0LD0B+2
MOV AX, 250BH
INT 21H
MOV DX, 2FCH
MOV AL, 0
OUT DX, AL ;令RTS、D TR端为逻辑1
RET
RESET ENDP
;------------------------------------------------------------------------------
DELAY PROC
MOV AH,86H ;延时1s
MOV CX, WORD PTR TTT+2
MOV DX, WORD PTR TTT
INT 15H
RET
DELAY ENDP
CODE ENDS
END BEG
主机程序与从机程序类似,这里不在螯述。
4. 程序分析
进行通信联络要采取两项措施:其一,在8250初始化子程序中,响MODEM控制寄存器写入命令字时,令D1位为1,D0位为1,从而使RS-232C的R T S端子、D TR端子输出
逻辑0,通知对方本端已经做好了数据发送和数据接受的准备工作;其二,对方在程序执行后,读取MODEM状态寄存器的内容,检查D5、D4位,这两位都为1,说明线路畅通,可以运行通信程序。
三. 调试步骤
程序调试要分两步进行,首先在单机上调试,按照图1(a)连线,使辅串口具有自发自收的外部环境,在这个环境下调试“PC机串口自动测试程序”,调试成功后,再在双机连同的环境下调试“PC机全双工双机通信程序”。双机连通实验时,先在一端执行程序,令一端暂不运行,以便观察屏幕的错误信息。
单片机双机之间的串行通信设计
专业方向课程设计报告 题目:单片机双机之间的串行通信设计
单片机双机之间的串行通信设计 一.设计要求: 两片单片机利用串行口进行串行通信:串行通信的波特率可从键盘进行设定,可选的波特率为1200、2400、4800和9600bit/s。 二、方案论证: 方案一:以两片51单片机作为通信部件,以4*4矩阵键盘作为数据输入接口,通过16个不同键值输入不同的信息,按照51单片机的方式3进行串口通信,从机采用中断
方式接收信息并按照通信协议改变波特率或者用I/O口输出、CD4511译码、数码管显示相关数据,整个系统的软件部分采用C语言编写。 方案二:整个系统的硬件设计与方案一样,但是通信方式采用方式一进行通信,主从机之间的访问采用查询方式,数据输出直接由单片机的译码程序输出译码数据,同时软件编写采用汇编语言。 两种方式从设计上来说各有特色,而且两种方式都应该是可行的。方案一中按照方式三通信可以输出九位数据而方式一只能输出八位数据,但就本题的要求来说方式一就可以了。主从机之间的交流采用中断方式是一种高效且保护单片机的选择,但是相比之下本人对查询方式的理解更好一些。数码管的显示若采用CD4511译码则直接输出数据就可以了,但是这样会增加硬件陈本,而且单片机的资源大部分都还闲置着,所以直接编写一段译码程序是比较好的做法。另外在软件编写上,采用C语言在后续设计中对硬件的考虑稍少一些,换言之采用汇编可以使自己对整个通信过程及单片机的部分结构有更清晰地认识所以综合考虑采用方案二。 三、理论设计: 采用AltiumDesigner绘制的原理图(整图)
本系统主要包括五个基本模块:单片机最小系统(包括晶振电路、电源、复位电路及相关设置电路)、4*4矩阵键盘、功能控制电路、数据显示电路、波特率更改指示电路。 本设计的基本思路是通过控制口选择将要实现的功能,然后矩阵键盘输入数据,单片机对数据进行处理(加校验码、设置功能标志位),然后与从机握手,一切就绪之后后就开始发送数据,然后从机对接收数据校验,回发校验结果,主机根据校验结果进行下一步动作,或者重发,或者进入下一 数据的发送过程,然后按照此过程不段循环,直到结束。 晶振电路提供脉冲,加上复位电路,将 EA接入高电电平选择片内程序存储器。 这是一个单片机能够工作的最低设置。
微机原理课程设计报告-双机串行通信
河北科技大学 课程设计报告 学生姓名:学号: 专业班级: 课程名称:微型计算机原理及应用技术学年学期:2 0 1 2 —2 0 1 3 学年第一学期 指导教师: 2 0 1 3 年1 月
课程设计成绩评定表
目录 一、设计题目 (1) 二、设计目的 (1) 三、设计原理及方案 (1) 1、8251A的基本性能 (1) 2、8251A的内部结构 (1) 3、8251外部引脚图 (2) 4、8251A的编程 (2) 5、8251A的初始化 (3) 四、实现方法 (5) 1、程序流程图如下: (5) 2、连线图 (5) 3、8251A操作过程流程图 (7) 4、试验程序(见附录) (7) 五、实施结果 (7) 六、改进意见及建议 (7) 七、个人所做贡献 (8) 八、设计体会 (8) 九、同组成员名单 (8) 十、附录 (9)
一、设计题目 双机通过两台试验箱串行通讯 二、设计目的 1、掌握8088/86实验串行口通信的方法。 2、了解实现串行通讯的硬环境、数据格式的协议、数据交换的协议。 3、学习串行口通讯程序编写方法。 三、设计原理及方案 1、8251A的基本性能 8251A是可编程的串行通信接口芯片,基本性能有: (1).两种工作方式:同步方式,异步方式。同步方式下,波特率为064K,异步方式下,波特率为0~19.2K。 (2).同步方式下的格式 每个字符可以用5、6、7或8位来表示,并且内部能自动检测同步字符,从而实现同步。除此之外,8251A也允许同步方式下增加奇/偶校验位进行校验。 (3).异步方式下的格式 每个字符也可以用5、6、7或8位来表示,时钟频率为传输波特率的1、16或64倍,用1位作为奇/偶校验。1个启动位。并能根据编程为每个数据增加1个、1.5个或2个停止位。可以检查假启动位,自动检测和处理终止字符。 (4).全双工的工作方式 (5).提供出错检测 2、8251A的内部结构 发送器由发送缓冲器和发送 控制电路两部分组成。接收器由接 收缓冲器和接收控制电路两部分 组成。数据总线缓冲器,读/写控 制电路,调制解调控制电路。 8251A 内部结构图
双机间的串口双向通信(DOC)
单片机原理与应用课程设计任务书
单片机原理与应用学年设计说明书 学院名称:计算机与信息工程学院 班级名称: 学生姓名: 学号:2012211369 题目:双机间的串口双向通信 指导教师 姓名: 起止日期:2014.12.29至2015.1.4
一、绪论 随着电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。 对于一些场合,比如:复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠,数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。 但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。这就对单片机通信提出了更高要求。 单片机之间的通信可以分为两大类:并行通信和串行通信。串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。 二、相关知识 2.1 双机通信介绍 两台机器的通信方式可分为单工通信、半双工通信、双工通信,他们的通信原理及通信方式为: 单工通信:是指消息只能单方向传输的工作方式。单工通信信道是单向信道,发送端和接收端的身份是固定的,发送端只能发送信息,不能接收信息;接收端只能接收信息,不能发送信息,数据信号仅从一端传送到另一端,即信息流是单方向的。通信双方采用单工通信属于点到点的通信。根据收发频率的异同,单工通信可分为同频通信和异频通信。 半双工通信:这种通信方式可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替地进行。也就是说,通信信道的每一段都可以是发送端,也可以是接端。但同一时刻里,信息只能有一个传输方向。如
双机串行通信的设计与实现
双机串行通信的设计与实现 一、设计要求 1.单机自发自收串行通信。接收键入字符,从8251A的发送端发送,与同一个8251A的接收端接收,然后在屏幕上显示出来。 2.双机串行通信,在一台PC机键入字符,从8251A的发送端发送给另一台PC机,另一台PC机的8251A的接收端接收,然后在屏幕上显示出来。 二、所用设备 IBM-PC机两台(串行通信接口8251A两片,串行发送器MC1488和串行接收器MC1489各两片,定时器/计数器8253,终端控制器8259等),串口线一根 串行直连电缆用于两台台电脑通过串行口直接相连,电缆两 端的插头都是9 针的母插头: 三、硬件方案 1.设计思想 计算机传输数据有并行和串行两种模式。在并行数据传输方式中,使用8条或更多的导线来传送数据,虽然并行传送方式的速度很快,但由于信号的衰减或失真等原因,并行传输的距离不能太长,在串行通信方式中,通信接口每次由CPU得到8位的数据,然后串行的通过一条线路,每次发送一位将该数据放送出去。 串行通信采用两种方式:同步方式和异步方式。同步传输数据时,一次传送一个字节,而异步传输数据是一次传送一个数据块。 串口是计算机上一种非常通用设备串行通信的协议。大多数计算机包含两个基于RS232的串口。串口按位(bit)发送和接收字节。尽管比按字节(byte)
的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。典型地,串口用于ASCII码字符的传输。通信使用3根线完成:(1)地线,(2)发送,(3)接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参数必须匹配: RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。可用于许多用途,比如连接鼠标、打印机或者Modem,同时也可以接工业仪器仪表。用于驱动和连线的改进,RS-232只限于PC串口和设备间点对点的通信。 IBM PC及其兼容机提供了一种有较强的硬件依赖性,但却比较灵活的串行口I/O的方法,即通过INT 14调用ROM BIOS串行通信口的例行程序。该例行程序。该例行程序包括将串行口初始化为指定的字节结构和传输速率,检查控制器的状态,读写字符等功能。 14号中断的功能总结如下: 串行口服务(Serial Port Service——INT 14H) 00H —初始化通信口03H —读取通信口状态 01H —向通信口输出字符04H —扩充初始化通信口 02H —从通信口读入字符 (1)、功能00H:初始化通信口 入口参数:AH=00H DX=初始化通信口号(0=COM1,1=COM2,……) AL=初始化参数,参数的说明如下:波特率奇偶位停止位字的位数76543210
C#串口通讯编程
C#中串口通信编程收藏 本文将介绍如何在.NET平台下使用C#创建串口通信程序,.NET 2.0提供了串口通信的功能,其命名 空间是System.IO.Ports。这个新的框架不但可以访问计算机上的串口,还可以和串口设备进行通信。 我们将使用标准的RS 232 C 在PC间通信。它工作在全双工模式下,而且我们不打算使用任何的握手 或流控制器,而是使用无modem连接。 命名空间 System.IO.Ports命名空间中最重用的是SerialPort 类。 创建SerialPort 对象 通过创建SerialPort 对象,我们可以在程序中控制串口通信的全过程。 我们将要用到的SerialPort 类的方法: ReadLine():从输入缓冲区读一新行的值,如果没有,会返回NULL WriteLine(string):写入输出缓冲 Open():打开一个新的串口连接 Close():关闭 Code: //create a Serial Port object SerialPort sp = new SerialPort (); 默认情况下,DataBits 值是8,StopBits 是1,通信端口是COM1。这些都可以在下面的属性中重新设置 : BaudRate:串口的波特率 StopBits:每个字节的停止位数量 ReadTimeout:当读操作没有完成时的停止时间。单位,毫秒 还有不少其它公共属性,自己查阅MSDN。 串口的硬件知识
在数据传输的时候,每个字节的数据通过单个的电缆线传输。包包括开始位,数据,结束为。一旦 开始位传出,后面就会传数据,可能是5,6,7或8位,就看你的设定了。发送和接收必须设定同样 的波特率和数据位数。 无猫模式 没有Modem模式的电缆只是简单地交叉传送和接收线。同样DTR & DSR, 和RTS & CTS 也需要交叉。 RS232针图 这里,我们三条线。互连2和3(一段的2pin连接3pin),连接两端的5pin。 [示例程序] 主程序 如果想使用默认属性,按“Save Status”按钮,如果想改变属性按“Property”。它会弹出下图:
1C#中串口通信编程教程
C#中串口通信编程教程 本文将介绍如何在.NET平台下使用C#创建串口通信程序,.NET2.0提供了串口通信的功能,其命名空间是System.IO.Ports。这个新的框架不但可以访问计算机上的串口,还可以和串口设备进行通信。我们将使用标准的RS232C在PC间通信。它工作在全双工模式下,而且我们不打算使用任何的握手或流控制器,而是使用无modem连接。 命名空间 System.IO.Ports命名空间中最重用的是SerialPort类。 创建SerialPort对象 通过创建SerialPort对象,我们可以在程序中控制串口通信的全过程。 我们将要用到的SerialPort类的方法: ReadLine():从输入缓冲区读一新行的值,如果没有,会返回NULL WriteLine(string):写入输出缓冲 Open():打开一个新的串口连接 Close():关闭 Code: //create a Serial Port object SerialPort sp=new SerialPort(); 默认情况下,DataBits值是8,StopBits是1,通信端口是COM1。这些都可以在下面的属性中重新设置 : BaudRate:串口的波特率 StopBits:每个字节的停止位数量 ReadTimeout:当读操作没有完成时的停止时间。单位,毫秒 还有不少其它公共属性,自己查阅MSDN。 串口的硬件知识 在数据传输的时候,每个字节的数据通过单个的电缆线传输。包包括开始位,数据,结束为。一旦开始位传出,后面就会传数据,可能是5,6,7或8位,就看你的设定了。发送和接收必须设定同样的波特率和数据位数。
双机间的串口双向通信2.0
单片机应用课程设计任务书
单片机应用课程设计说明书 学院名称:计算机与信息工程学院 班级名称:网工124 学生姓名:卞可虎 学号:2012211369 题目:双机间的串口双向通信设计指导教师:于红利 起止日期:2014.12.29至2015.1.4
目录 一、绪论 (1) 二、相关知识 (6) 2.1 双机通信介绍 (6) 2.2单片机AT89C51介绍 (6) 2.3 串行通信简介 (8) 2.3.1串行通信的特点 (8) 2.3.2串行通信技术标准 (9) 三、总体设计 (10) 3.1 设计需求 (10) 四、硬件设计 (10) 4.1 系统硬件电路设计 (10) 4.1.1整体电路设计 (10) 4.1.2 控制电路设计 (11) 4.1.3 复位电路 (11) 4.1.4 显示电路 (12) 五、软件设计 (12) 5.1发送端程序流程 (12) 5.2接收端程序流程 (13) 5.3按键程序 (14) 5.4串口通信程序 (15) 5.5数码管显示程序 (16)
六、Proteus软件仿真 (16) 七、结束语 (19) 参考文献 (20) 指导教师评语 (21) 成绩评定 (21) 附录:源程序 (22) 一、绪论 电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。单片机之间的通信可以分为两大类:并行通信和串行通信。串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。 对于一些类似复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠,数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。这就对单片机通
通用串口通讯程序设计
通用串口通讯程序设计 作者:和光同尘版本:V1.0 序 做硬件开发近20载,花了近十年做基础开发,对硬件开发略知一二,接触的做国防/工业大项目的人才我就是和他们沟通中获取了很多思想;人生已过而立之年,不惑解疑,总想写点什么。从一线研发(做了4年),开发(3年),硬件开发主管(12年),算起来人生从不到弱冠之年(中专毕业)开始接触MCS51、AVR等8位处理器到ARM v7核、CoretxM 核的32位处理器,CPLD/FPGA、PLC…………啰嗦了!! 最近因为工作原因需要把一些自己感悟的记录下来,希望传递给入门的有心沉下心做基础健壮扎实的初学者。
正文 做嵌入式硬件开发一般都会用到通讯数据交互,这就涉及通讯协议/规约的设计。本文从基础的串口(RS232、RS485等)为模型进行讲解。 说道串口通讯,就是编写串口程序,简单的就是1个字节的发送,1个字节的接收,但这不能满足绝大多数实际工作业务需求,实际需要一串字节数据的交互,A发送,B接收……Z 接收;Z机……B机收到根据情况需要回复(ACK)A机,这个过程就叫交互双向通讯(本文不讨论多主机、1主机相对复杂通讯机制。)。这种通讯就需要提前设计好通讯的规约(大家约定好暗号——每个字节代表什么意思)。 接下来编写通信程序(发送/接收),如何写出一个健壮高效串口程序?是否健壮高效其实很大一部分取决于通讯接收程序的架构。 通讯程序编写依据是——通讯规约,通讯帧的设计。 ●I类通用型: ||帧头段|===|数据段|===|校验码|===|帧尾段|| ●II类时隙通讯: ||开始时隙T(T1T2T3T4T5T6)|=|功能码|=|数据段|=|校验码|=|结束时隙T(T1T2T3)|注意:时隙只是纯粹的前后两帧数据的间隔时间,这期间坚决不能有数据产生。 1.1I类通用型 ◆帧头段 帧头段用于鉴别一串字节流中1帧数据起始位置,这个帧头段必须具有足够的特殊标识(易分辨)。 什么样的特殊标识可作为帧头? 根据个人经验: ①具有监测通讯波特率功能特点:0B01010101(55H)、0B10101010(AAH)或0B00000000(00H)、0B11111111(FFH); ②利用ASCII码如MODBUS ASCII规约以冒号‘:’(3AH)作为帧头。也可以采用ASCII ‘U’(55H)、‘@’(40H)等等 只要保证帧头字节数据内容,在所有通讯数据字节流中,除帧头有意为之而出现,那就是帧头。建议最好有两个字节及以上,这样数据出现与帧头一致的概率更加小,才做到独一无二的特殊性。
串行端口程序设计
串行端口程序设计 一、实验目的 了解在linux环境下串行程序设计的基本方法。 掌握终端的主要属性及设置方法,熟悉终端I /O函数的使用。 学习使用多线程来完成串口的收发处理。 二、实验内容 读懂程序源代码,学习终端I /O函数的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。 三、预备知识 有C语言基础。 掌握在Linux下常用编辑器的使用。 掌握Makefile 的编写和使用。 掌握Linux下的程序编译与交叉编译过程 四、实验设备及工具 硬件:UP-CUP S2410 经典平台、PC机Pentium 500以上, 硬盘10G以上。 软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境 五、实验原理 异步串行I /O方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。数据的各不同位可以分时使用同一传输通道,因此串行I/O可以减少信号连线,最少用一对线即可进行。接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。
为了恢复发送的信息,双方必须协调工作。在微型计算机中大量使用异步串行I/O方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。 图2.3.1串行通信字符格式 图2.3.1给出异步串行通信中一个字符的传送格式。开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5位或2位的时间宽度。至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特率为50,95,110,150,300,600,1200,2400,4800,9600等。 接收方按约定的格式接收数据,并进行检查,可以查出以下三种错误: ●奇偶错:在约定奇偶检查的情况下,接收到的字符奇偶状态和约定不符。 ●帧格式错:一个字符从起始位到停止位的总位数不对。 ●溢出错:若先接收的字符尚未被微机读取,后面的字符又传送过来,则产生溢出错。 每一种错误都会给出相应的出错信息,提示用户处理。一般串口调试都使用空的MODEM 连接电缆,其连接方式如下:
双机通信课程设计
西安邮电大学 单片机课程设计报告书题目:双机通信系统
、系统整体设计 1. 系统设计思路 双机通信的实质就是解决两单片机串行通信问题。针对于89C52单片机全双工异步 串行通信口,我们采用单片机直接交叉互连的串行通信方式。 考虑到设计应用于短距离传输、两单片机具有相同的数据格式及电平且为使设计简 单,我们最终决定采用方式二单片机直接交叉连接的串行通信方式, 上位机发送的数据 由串行口 TXD 端输出,直接由下位机的串行口数据接收端 RXD 接攵。需要注意的是一定 要保证主从机相同的数据传输速率,即要求设置相同的波特率。电路分为数码管显示模 块,以及单片机工作的基本复位、晶振模块。 2. 系统设计原理 (1)串行通信 一个是数据传送,另一个是数据转换。所谓数 所谓数据转换就是指单片机在接收数据时,如 单片机在发送 数据时,如何把并行数据转换为 串行数据进行发送。单片机的串行通信使用的是异步串 行通信, 所谓异步就是指发送端 和接收端使用的不是同一个时钟。异步串行通信通常以字符(或者字节)为单位组成字 符帧传送。字符帧由发送端一帧一帧地传送, 接收端通过传输线一帧一帧地接收。 而对 于两个单片机之间的串行通信,由于具有相同的数据格式及电平且是短距离通信则不必 要使用一些电平转化芯片(如 max232等)便可直接实现串行通讯,需要注意的是两单 片机硬件要共地,软件中需要设置相同波特率 STC89C5单片机有一个全双工的异步串行通信口,串行结构如下: ①数据缓冲器(SBUF 接受或发送的数据都要先送到 SBUF 缓存。有两个,一个缓存,另一个接受,用同 一直接地址99H,发送时用指令将数据送到 SBUF 即可启动发送;接收时用指令将 SBUF 中接收到的数据取出。 ②串行控制寄存器(SCON SCO 用于串行通信方式的选择,收发控制及状态指示,各位含义如下: SM0,SM1串行接口工作方式选择位,这两位组合成 00, 01,10,11对应于工作方 式0、1、2、3。串行接口工作方式特点见下表1. 表1串行口工作方式表 串行数据通信要解决两个关键问题, 据传送就是指数据以什么形式进行传送。 何把接收到的串行数据转化为并行数据,
Java串口通信编程指南
Java串口通信编程指南
1. 概述 在java中,利用Java Communication包可以操作串口,但官方的包在3.0之后就只支持Linux和Solaris平台了,Windows平台的只支持到98年出的2.0版本,不过在XP下还能使用。另外,也可以用开源的Rxtx实现串口通信,这里仅以Java Communication包,在Windows 平台实现串口通信进行说明。 2. 前期准备 2.1. 下载Java Communication包 ?下载地址如下:https://www.360docs.net/doc/ce1749753.html,/Jolt/javacomm20-win32.zip。 ?如果是非Windows平台,请到Sun网站选择其他版本下载。地址如下: https://www.360docs.net/doc/ce1749753.html,/download/products.xml?id=43208d3d 2.2. 配置 ?解压缩javacomm20-win32.zip ?把win32com.dll拷贝到{JAVA_HOME}\jre\bin ?把comm.jar拷贝到{JAVA_HOME}\jre\lib\ext ?把https://www.360docs.net/doc/ce1749753.html,m.properties拷贝到{JAVA_HOME}\jre\lib ?set CLASSPATH={JAVA_HOME}\jre \lib\ext \comm.jar;%classpath%
3. 实现过程 主要步骤包括: ?获得串口标识 ?打开串口 ?设置串行端口通讯参数 ?获取输入(出)流 ?进行读写操作 3.1. 获得串口标识 指定串口的端口号,生成串口的标识类的实例。 https://www.360docs.net/doc/ce1749753.html,mPortIdentifier是通讯端口管理器,控制访问到通讯端口的中心类。一个应用程序首先使用CommPortIdentifier中的方法,通过相关的驱动去获取那些通讯端口是可用的并且选择一个端口便于开始。它包括如下功能: a. 通过驱动决定通讯端口是可用的。 b. 打开通讯端口为了I/O操作。 c. 决定端口的拥有者。 d. 解析端口拥有者的争夺。 e. 管理事件显示在端口拥有者的中的状态改变。 示例代码如下: 代码: 3.2. 打开串口 示例代码如下: 代码:
双机串行通信的设计与实现样本
综合实验报告 实验题目:双机串行通信设计与实现 学生班级:电子 学生姓名: 学生学号: 指引教师: 实验时间: .9.12-.9.17
题目:双机串行通信设计与实现 班级:电子14-2 姓名:陈俊臣 摘要 串行通信是单片机一种重要应用。本次课程设计就是要运用单片机来完毕一种系 统实现双片单片机串行通信。通信成果实用数码管进行显示数码管采用查表方式显示。两个单片机之间采用RS232进行双机通信。在通信过程中使用通信合同进行通信。 双机通信实质就是解决两单片机串行通信问题。针对于89C51单片机全双工异步串行通信口,咱们采用单片机直接交叉互连串行通信方式。考虑到本设计应用于短距离传播、两单片机具备相似数据格式及电平且为使设计简朴,咱们最后决定本系统采用方式一单片机直接交叉连接串行通信方式,上位机发送数据由串行口TXD端输出,直接由下位机串行口数据接受端RXD接受。本设计硬件电路分为数码管显示模块、单片机工作基本复位电路以及晶振模块。编程采用C语言加以实现。通信成果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双向通信。
目录 1 引言------------------------------------------------------- 2 设计原理及规定--------------------------------------------- 2.1设计规定和原理-------------------------------------------- 2.2串行通信概述与分类----------------------------------- 2.3串行通信和并行通信区别------------------------------- 2.4 MCS-51串行接口基本特点----------------------------- 3器件简介 3.1器件简朴概述----------------------------------------- 3.2 器件重要功能特性-------------------------------------- 3.3 芯片引脚简介---------------------------------------- 4系统设计 4.1设计规定-------------------------------------------- 4.2设计方案-------------------------------------------- 4.3硬件设计-------------------------------------------- 4.4软件设计------------------------------------------- 4 电路仿真图---------------------------------------------------- 5心得------------------------------------------------------------
串行异步通信程序设计
******************* 实践教学 ******************* 兰州理工大学 计算机与通信学院 2014年秋季学期 《通信系统综合训练》课程设计 题目:串行异步通信程序设计 专业班级:通信工程(1)班 姓名:李银环 学号:11250134 指导教师:王惠琴 成绩:
摘要 在Windows环境下实现通信的方法主要有利用MSComm控件和直接用Windows API编程,软件采用Microsoft Visual C++ 6.0,利用MSComm控件编程相对来说更简单一些,而直接使用Windows API编程更灵活一些。 本次课程设计分析了串行异步通信的基本原理,在VC++6.0的环境下利用MSComm控件实现了两个PC机的COM口间的数据发送和接收。本文通过对COM1口进行初始化编程,以及对建立的工程中的每个对话框和按钮分别进行编程和设置,成功的实现了利用PC机的两个COM口进行异步通信,并能根据设置调整异步传行通信参数。 关键词:VC++6.0;MSComm控件;串行异步通信
目录 前言 (1) 第1章串行异步通信基本原理 (2) 1.1 串行通信协议 (2) 1.2 串口通信的基本概念 (3) 1.3 RS-232简介 (4) 第2章 VC++软件简介 (5) 2.1 VC++6.0简介 (5) 2.2 Microsoft Communications Control 控件 (6) 第3章串行异步通信系统分析 (7) 第4章串行异步通信系统设计 (8) 4.1建立工程 (8) 4.2 在程序中添加MSComm控件 (9) 4.3 初始化串口:设置MSComm控件的属性 (11) 4.4 发送数据 (12) 第5章串行异步通信程序调试 (18) 5.1 计算机串口设置 (18) 5.2 程序运行结果 (18) 参考文献 (20) 附录 (21) 致谢 (29)
双机通信课程设计
成绩: 课程设计报告书 所属课程名称单片机原理与接口技术 题目双机串行通信 分院机电学院 专业、班级机械设计制造及其自动化B0902学号0612090218 学生姓名史强 指导教师周春明 2012年7月13日
目录 1课程设计任务书 (1) 2总体设计 (2) 3硬件系统设计 (3) 4程序设计 (6) 5程序调试及结果分析 (11) 6总结 (13) 7参考文献 (14)
辽东学院 一课程设计任务书 课程设计题目:双机串行通信 课程设计时间:自2012 年7月2日起至2012 年7月13日。课程设计要求: 1.通过本次课题设计,应用《单片机原理及其接口技术》等所学相关知识及查阅资料,完成简易双机串行通信设计,以达到理论与实践更好的结合、进一步提高综合运用所学知识和设计的能力的目的。 2.两片单片机之间进行串行通信,发送端将0~f循环发送到接收端,并在接 收端显示。接收完成后,led灯亮。 学生签名:史强 2012 年7月13日 课程设计评阅意见 评阅教师: 2012年月日
二总体设计 2.1 设计目的 通过本次课题设计,应用《单片机原理及其接口技术》等所学相关知识及查阅资料,完成简易双机串行通信设计,以达到理论与实践更好的结合、进一步提高综合运用所学知识和设计的能力的目的。 通过本次设计的训练,可以使我在基本思路和基本方法上对基于MCS-51单片机的嵌入式系统设计有一个比较感性的认识,并具备一定程度的设计能力。 2.2 设计任务 两片单片机之间进行串行通信,发送端将0~f循环发送到接收端,完成后在接收端的led 灯亮。 2.3 设计方法 本次设计,对于两片89C51,采用RS232进行双机通信。发送方的数据由串行口TXD段输出。接受方接收后,灯亮。为提高抗干扰能力,还可以在输入输出端加光耦合进行光电隔离。 软件部分,通过通信协议进行发送接收,主机先送AAH给从机,当从机接收到AAH后,向主机回答BBH。主机收到BBH后就把数码表TAB[16]中的10个数据送给从机,并发送检验和。从机收到16个数据并计算接收到数据的检验和,与主机发送来的检验和进行比较,若检验和相同则发送00H给主机;否则发送FFH 给主机,重新接受。从机收到16个正确数据后送到一个数码管显示。
C#中串口通信编程
本文将介绍如何在.NET平台下使用C#创建串口通信程序,.NET 2.0提供了串口通信的功能,其命名 空间是System.IO.Ports。这个新的框架不但可以访问计算机上的串口,还可以和串口设备进行通信。 我们将使用标准的RS 232 C 在PC间通信。它工作在全双工模式下,而且我们不打算使用任何的握手或流控制器,而是使用无modem连接。 命名空间 System.IO.Ports命名空间中最重用的是SerialPort 类。 创建SerialPort 对象 通过创建SerialPort 对象,我们可以在程序中控制串口通信的全过程。 我们将要用到的SerialPort 类的方法: ReadLine():从输入缓冲区读一新行的值,如果没有,会返回NULL WriteLine(string):写入输出缓冲 Open():打开一个新的串口连接 Close():关闭 Code: //create a Serial Port object SerialPort sp = new SerialPort (); 默认情况下,DataBits 值是8,StopBits 是1,通信端口是COM1。这些都可以在下面的属性中重新设置: BaudRate:串口的波特率 StopBits:每个字节的停止位数量 ReadTimeout:当读操作没有完成时的停止时间。单位,毫秒 还有不少其它公共属性,自己查阅MSDN。
串口的硬件知识 在数据传输的时候,每个字节的数据通过单个的电缆线传输。包包括开始位,数据,结束为。一旦 开始位传出,后面就会传数据,可能是5,6,7或8位,就看你的设定了。发送和接收必须设定同样 的波特率和数据位数。 无猫模式 没有Modem模式的电缆只是简单地交叉传送和接收线。同样DTR & DSR, 和 RTS & CTS也需要交叉。RS232针图 这里,我们三条线。互连2和3(一段的2pin连接3pin),连接两端的5pin。 [示例程序] 主程序
MFC串口通信编程详解解析
MFC串口通信编程介绍 主要介绍了用CreateFile(函数和WriteFile(函数读写串口的实例,以及设置串口属性的实例. 在工业控制中,工控机(一般都基于Windows平台经常需要与智能仪表通过串口 进行通信.串口通信方便易行,应用广泛. 一般情况下,工控机和各智能仪表通过RS485总线进行通信.RS485的通信方式是半双工的,只能由作为主节点的工控PC机依次轮询网络上的各智能控制单元子节点.每次通信都是由PC机通过串口向智能控制单元发布命令,智能控制单元在接收到正确的命令后作出应答. 在Win32下,可以使用两种编程方式实现串口通信,其一是使用ActiveX控件,这种方法程序简单,但欠灵活.其二是调用Windows的API函数,这种方法可以清楚地掌握串口通信的机制,并且自由灵活.下面只介绍API串口通信部分. 串口的操作可以有两种操作方式:同步操作方式和重叠操作方式(又称为异步操作方式.同步操作时,API函数会阻塞直到操作完成以后才能返回(在多线程方式中, 虽然不会阻塞主线程,但是仍然会阻塞监听线程;而重叠操作方式,API函数会立即返回,操作在后台进行,避免线程的阻塞. 无论哪种操作方式,一般都通过四个步骤来完成: (1打开串口 (2配置串口 (3读写串口 (4关闭串口
一打开串口 Win32系统把文件的概念进行了扩展.无论是文件、通信设备、命名管道、邮件槽、磁盘、还是控制台,都是用API函数CreateFile来打开或创建的.该函数的原型为: HANDLE CreateFile( LPCTSTR lpFileName, DWORD dwDesiredAccess, DWORD dwShareMode, LPSECURITY_ATTRIBUTES lpSecurityAttributes, DWORD dwCreationDistribution, DWORD dwFlagsAndAttributes, HANDLE hTemplateFile; ?lpFileName:将要打开的串口逻辑名,如“COM1”; ?dwDesiredAccess:指定串口访问的类型,可以是读取、写入或二者并列; ?dwShareMode:指定共享属性,由于串口不能共享,该参数必须置为0; ?lpSecurityAttributes:引用安全性属性结构,缺省值为NULL; ?dwCreationDistribution:创建标志,对串口操作该参数必须置为 OPEN_EXISTING; ?dwFlagsAndAttributes:属性描述,用于指定该串口是否进行异步操作,该值为FILE_FLAG_OVERLAPPED,表示使用异步的I/O;该值为0,表示同步I/O操 作;
基于51单片机的双机串行通信
机电高等专科学校2015-2016学年第1学期通信实训报告 系别:电子通信工程系 班级: xxxxxx 学号: 13xxxxxxxxx : xxxxxxx 2015年12月
基于51单片机的双机串行通信 摘要:串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。在通信过程中,使用通信协议进行通信。 关键字:通信双机 一、总体设计 1设计目的 1.通过设计相关模块充分熟悉51单片机的最小系统的组成和原理; 2.通过软件仿真熟悉keil和proteus的配合使用; 3.通过软件编程熟悉51的C51编程规; 4.通过实际的硬件电路搭设提高实际动手能力。 2.设计要求: 两片单片机之间进行串行通信,A机将0x06发送给B机,在B机的数码管上静态显示1,B机将0~f动态循环发送到A机,并在其数码管上显示。 3.设计方案: 软件部分,通过通信协议进行发送接收,A机先送0x06(B机数码管显示1)给B机(B机静态显示),当从机接收到后,向B机发送代表0-f的数码管编码数组。B收到0x06后就把数码表TAB[16]中的数据送给从机。 二、硬件设计 1.51单片机串行通信功能 计算机与外界的信息交换称为通信,常用的通信方式有两种:并行通信和串行通信。51单片机用4个接口与外界进行数据输入与数据输出就是并行通信,并行通信的特点是传输信号的速度快,但所用的信号线较多,成本高,传输的距离较近。串行通信的特点是只用两条信号线(一条信号线,再加一条地线作为信号回路)即可完成通信,成本低,传输的距离较远。 51单片机的串行接口是一个全双工的接口,它可以作为UART(通用异步接受和发送器)用,也可以作为同步移位寄存器用。51单片机串行接口的结构如下:
VC++串口通信编程
在工业控制中,工控机(一般都基于Windows平台)经常需要与智能仪表通过串口进行通信。串口通信方便易行,应用广泛。 一般情况下,工控机和各智能仪表通过RS485总线进行通信。RS485的通信方式是半双工的,只能由作为主节点的工控PC机依次轮询网络上的各智能控制单元子节点。每次通信都是由PC机通过串口向智能控制单元发布命令,智能控制单元在接收到正确的命令后作出应答。 在Win32下,可以使用两种编程方式实现串口通信,其一是使用ActiveX 控件,这种方法程序简单,但欠灵活。其二是调用Windows的API函数,这种方法可以清楚地掌握串口通信的机制,并且自由灵活。本文我们只介绍API串口通信部分。 串口的操作可以有两种操作方式:同步操作方式和重叠操作方式(又称为异步操作方式)。同步操作时,API函数会阻塞直到操作完成以后才能返回(在多线程方式中,虽然不会阻塞主线程,但是仍然会阻塞监听线程);而重叠操作方式,API函数会立即返回,操作在后台进行,避免线程的阻塞。 无论那种操作方式,一般都通过四个步骤来完成: (1)打开串口 (2)配置串口 (3)读写串口 (4)关闭串口 (1)打开串口 Win32系统把文件的概念进行了扩展。无论是文件、通信设备、命名管道、邮件槽、磁盘、还是控制台,都是用API函数CreateFile来打开或创建的。该函数的原型为: HANDLE CreateFile( LPCTSTR lpFileName, DWORD dwDesiredAccess, DWORD dwShareMode, LPSECURITY_ATTRIBUTES lpSecurityAttributes, DWORD dwCreationDistribution, DWORD dwFlagsAndAttributes, HANDLE hTemplateFile); ?lpFileName:将要打开的串口逻辑名,如“COM1”; ?dwDesiredAccess:指定串口访问的类型,可以是读取、写入或二者并列; ?dwShareMode:指定共享属性,由于串口不能共享,该参数必须置为0; ?lpSecurityAttributes:引用安全性属性结构,缺省值为NULL; ?dwCreationDistribution:创建标志,对串口操作该参数必须置为OPEN_EXISTING; ?dwFlagsAndAttributes:属性描述,用于指定该串口是否进行异步操作,该值为FILE_FLAG_OVERLAPPED,表示使用异步的I/O;该值为0,表示同 步I/O操作; ?hTemplateFile:对串口而言该参数必须置为NULL;
双机通信,单片机课程设计
单片机课程设计 双机通信 一、设计目的 1、掌握单片机89C52的程序设计,掌握单片机通信程序编制方法。 2、了解单片机实现通信的硬件环境。 3、掌握双机通信的原理和方法。 二、设计要求 1、用两片单片机,实现双机通信; 2、用与A机连接的按键控制A机对B机的信息传输,每按一次键,首先发送端显示要发送数据,两台机器的发光二极管的显示相同。 3、用与B机连接的按键控制B机对A机的信息传输,每次按键,数码管的显示自动加一。 三、设计器材 器件名称个数 STC8952RC 2 晶振 2 电容(30PF) 4 电容(10uF) 2 LED 4 电阻(10K) 4 电阻(330) 2
电阻(8.2K) 2 开关 4 数码管 2 三极管(NPN) 1 排阻 1 四、设计思路及方案 1、设计思路 计划采用主从共两片STC8952RC单片机来实现双机通信的,我们采用单片机直接交叉连接的方式,上位机发送的数据由串行口TXD端输出,直接由下位机的串行口数据接收端RXD接收。需要注意的是一定要保证主从机相同的数据传输速率,即要求设置相同的波特率。电路分为数码管显示模块,单片机工作的基本复位、晶振模块。 2、设计原理 (1)原理概述 双机通信系统通过主从单片机的串行口来实现数据的收发。主单片机通过开关电路来启动发送程序,当开关按下时向从机发送一个数据,从机通过接收中断来接收主机发送过来的数据,并通过编写好的数据代码在LED数码管上显示主机发送过来的数据。同时从机给主机发送一个应答信号来表示已经接收到了主机发送过来的数据,在主机接收应答并校验正确,以二极管显示,这样就完成了一个数据的通信过程,等待按键按下,然后继续下一次数据的发送直到结束。(2)串行通信 串行数据通信要解决两个关键问题,一个是数据传送,另一个是