基于单片机的智能小车设计
第1章系统概述
智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。中国自1978年把“智能模拟”作为国家科学技术发展规划的主要研究课题,开始着力研究智能化。从概念的引进到实验室研究的实现,再到现在高端领域(航天航空、军事、勘探等)的应用,这一过程为智能化的全面发展奠定基石。智能化全面的发展是实现其对资源的合理充分利用,以尽可能少的投入得到最大的收益,大大提高工业生产的效率,实现现有工业生产水平从自动化向智能化升级,实现当今智能化发展由高端向大众普及。从先前的模拟电路设计,到数字电路设计,再到现在的集成芯片的应用,各种能实现同样功能的元件越来越小为智能化产物的生成奠定了良好的物质基础。本设计以智能化全面发展的普及与应用为目的,整体开发过程简单易懂,所选择的平台与各电子元件恰当合理,无需花费过多的人力财力便可达到预期所要求各功能的实现,也符合课题研究的意义。设计的理论方案、分析方法及特色与创新点等可以为国内自动运输机器人、采矿勘探机器人、家用自动清洁机器人等自动半自动机器人的设计与普及有一定的参考意义。小车也可以作为玩具的发展对象,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。同时作为高校毕业设计研究课题,对学生的思维、动手能力以及总结论述等综合能力得到充分锻炼,有利于以后独立及全面的发展。设计主要以简易智能机器人为开发平台,选择通用、价廉的51单片机为控制平台,选择常见的电机模型车为机械平台,通过细化设计要求,结合传感器技术、电机控制技术、无线通信技术等相关知识实现小车的各种功能。设计完成以由无线电遥控、红外线对管的自动寻迹、红外线自动避障以及语音控制组成的硬件模块结合软件设计组成多功能智能小车,共同实现小车的前进倒退、转向行驶,自动根据地面黑线寻迹导航,检测障碍物后停止和语音信号的控制等功能,实现智能控制,达到设计目标。
1.1智能小车的意义和作用
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们
的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器
一直是人类的梦想。矚慫润厲钐瘗睞枥庑赖。
随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为
自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航系统,对于视觉
的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。聞創沟燴鐺險爱氇谴净。
机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。避障控制系统是基于自动导引小车(AVG—AUTO-GUIDE VEHICLE)系统,基于它的智能小车实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。使用传感器感知路线和障碍并作出判断和相应的执行动作。残骛楼諍锩瀨濟溆塹籟。
该智能小车可以作为机器人的典型代表。它可以分为三大组成部分:传感器检测部分、执行部分、CPU。机器人要实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。智能小车的执行部分,是由直流电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。CPU使用STC89C52RC单片机,配合软件编程实现。酽锕极額閉镇桧猪訣锥。
1.2设计目标
本设计的主要任务就是设计一个以单片机为核心的智能小车,主要实现循迹及简单的障碍物检测功能。通过装在小车前面的红外传感器,获取路面黑线位置信息,输入到单片机中,再由单片机输出控制信号,由驱动模块驱动电机实现小车的自主循迹行驶,同时当路线前方检测到有障碍物时,进行相应的避障措施。彈贸摄尔霁毙攬砖卤庑。1.3设计工具简介及运行环境
1.电路原理图.DDB文件,PROTEL 99 SE软件设计。其主要包含两大部分:电路工程设计部分和电路仿真与PLD部分。謀荞抟箧飆鐸怼类蒋薔。
2.程序代码.UVPROJ文件,KEIL UVISION2软件编写。KEIL UVISION2是美国KEIL SOFTWARE公司出品的51系列兼容单片机C语言软件开发系统,使用接近于传统C语言
的语法来开发,与汇编相比,C语言在功能上、结构性、可读性、可维护性上有明显的优势,因而易学易用,而且大大的提高了工作效率和项目开发周期,他还能嵌入汇编,您可以在关键的位置嵌入,使程序达到接近于汇编的工作效率。厦礴恳蹒骈時盡继價骚。
3.运行环境:其程序,电路图部分在WIN7环境下完成。
第2章智能小车设计
根据要求,确定如下方案:在现有玩具电动车的基础上,加装光电检测器,实现对电动车的速度、位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。茕桢广鳓鯡选块网羈泪。
2.1智能小车的设计要求
本设计的主要任务就是设计一个以单片机为核心的智能小车,主要实现循迹及简单的躲避障碍物功能。通过装在小车前面的红外传感器,获取路面黑线位置信息,输入到单片机中,再由单片机输出控制信号,由驱动模块驱动电机实现小车的自主循迹行驶,同时当路线前方以及左右方检测到有障碍物时,采取相应的避让措施。鹅娅尽損鹌惨歷茏鴛賴。
2.2系统总体设计思路
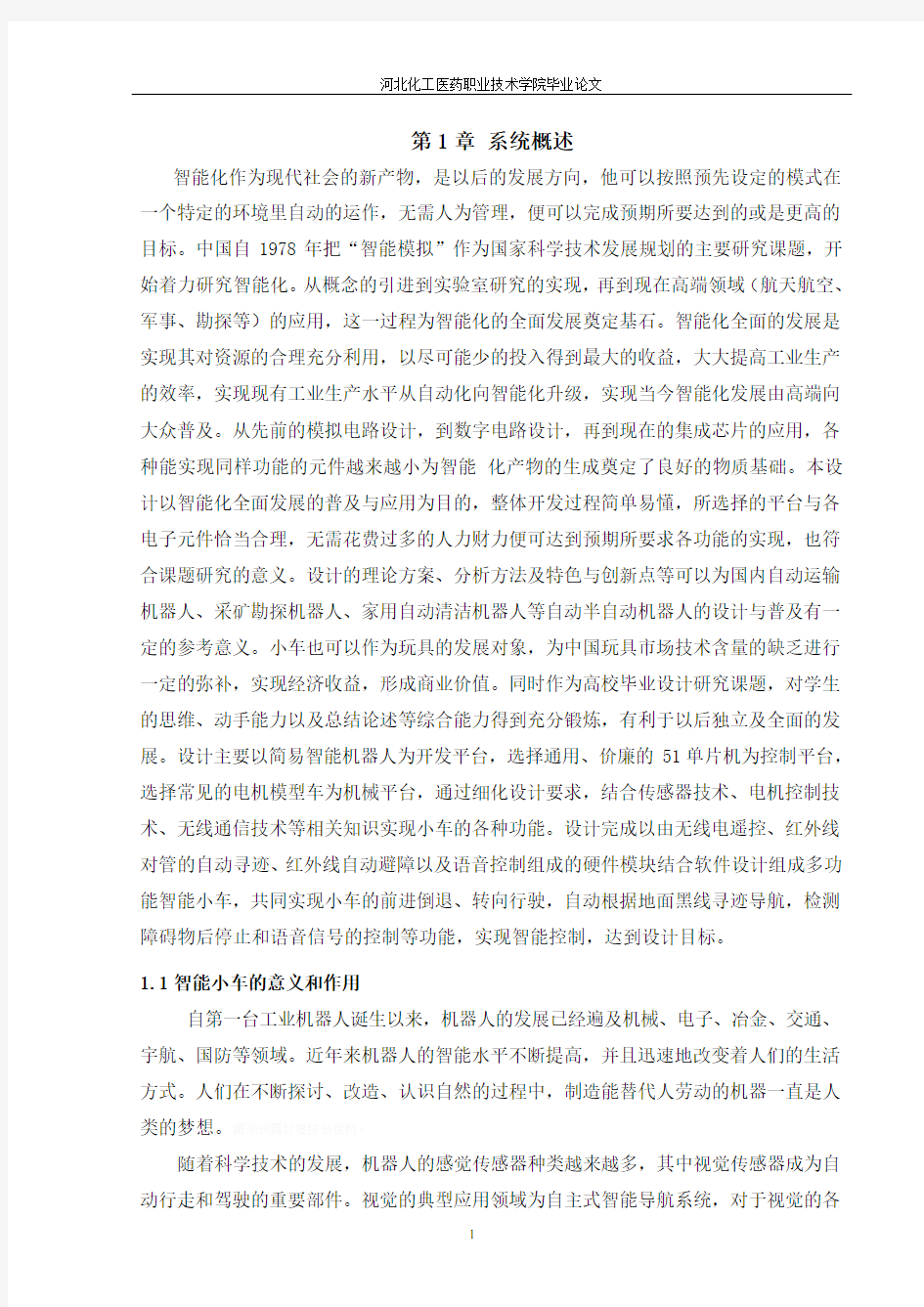
智能小车采用前轮驱动,前轮左右两边各用一个电机驱动,调制前面两个轮子的转速起停从而达到控制转向的目的,后轮是万象轮,只是起支撑的作用。当循迹模块左边的传感器检测到黑线时,主控芯片控制左轮电机停止,右轮继续向前转动,从而将车向左修正,当车身下右边传感器检测到黑线时,主控芯片控制右轮电机停止,左轮继续向前转动,从而将车向右修正。当全部的传感器都检测到黑线时,主控芯片控制左右轮电机都停止,小车停止。如图2.1所示。籟丛妈羥为贍偾蛏练淨。
循迹红外对管
避障红外对
管
复位电路
STC89C52RC
时钟电路
电机驱动
图2.1结构简图
避障的原理和循线一样,分别在车身右边左边以及前方装一个光电对管,当其检测到障碍物时,主控芯片给出信号控制车子是继续向前还是左转或者右转,从而避开障碍物,在小车的转动角度的控制方面采用的时间电路的方法,通过不断的调试最终确定一个中断时间,让小车在转弯时可以转出个90度角。这个时间的设定也不是一成不变的,不同的路面由于路面的摩擦力不同,时间的设定也会有所不同。預頌圣鉉儐歲龈讶骅籴。通过对上面这句话的深入理解和建模转化,最后设计出以下方案。
本系统共分为5块模块。
1:主控制模块,主要实现各个模块传输的数据处理,输出指令等功能。
2:电机驱动模块,主要控制小车电机的启动和停止,使小车的电机在配合下达到小车的行走、停止、转弯等动作。渗釤呛俨匀谔鱉调硯錦。
3:循迹模块,通过小车前方的3个红外对管寻找地上的黑线,从而让小车按着黑线行走。
4:避障模块,检测小车的周围是否有障碍物,向单片机传输信号,从而让小车避开障碍物。
5:电源模块,分别用2个6伏直流电源给单片机和电机供电,并加大小车的重量,让小车在行走过程中更加稳定。铙誅卧泻噦圣骋贶頂廡。
2.3系统的硬件选择
1、单片机的选择
采用单片机作为整个系统的核心,用其控制行进中的小车,以实现其既定的性能指标。充分分析我们的系统,其关键在于实现小车的自动控制,而在这一点上,单片机就显现出来它的优势——控制简单、方便、快捷。这样一来,单片机就可以充分发挥其资源丰富、有较为强大的控制功能及可位寻址操作功能、价格低廉等优点。因此,这种方案是一种较为理想的方案。擁締凤袜备訊顎轮烂蔷。
针对本设计特点——多开关量输入的复杂程序控制系统,需要擅长处理多开关量的标准单片机,而不能用精简I/O口和程序存储器的小体积单片机,D/A、A/D功能也不必选用。根据这些分析,我选定了STC89C52RC单片机作为本设计的主控装置,51单片机具有功能强大的位操作指令,I/O口均可按位寻址,程序空间多达8K,对于本设计也绰绰有余,更可贵的是51单片机价格非常低廉。贓熱俣阃歲匱阊邺镓騷。
在综合考虑了传感器、两部电机的驱动等诸多因素后,我们决定采用一片单片机,充分利用STC89C52RC单片机的资源。坛摶乡囂忏蒌鍥铃氈淚。
2、驱动模块的选择
用单片机控制达林顿管使之工作在占空比可调的开关状态下,精确调整电动机转速。这种电路由于工作在管子的饱和截止模式下,效率非常高,H型桥式电路保证了简单的实现转速和方向的控制,电子管的开关速度很快,稳定性也极强,是一种广泛采用的 PWM调速技术。现市面上有很多此种芯片,我选用了L298N。蜡變黲癟報伥铉锚鈰赘。
这种调速方式有调速特性优良、调整平滑、调速范围广、过载能力大,能承受频繁的负载冲击,还可以实现频繁的无级快速启动、制动和反转等优点。因此决定采用使用功率三极管作为功率放大器的输出控制直流电机。買鲷鴯譖昙膚遙闫撷凄。
3、循迹模块的选择
采用红外一体化传感器。此方案可以降低可见光的干扰,灵敏度高,同时其尺寸小、质量轻、价格也低廉。外围电路简单,安装起来方便,电源要求不高,用它作为近距离传感器是最理想的.綾镝鯛駕櫬鹕踪韦辚糴。
4、避障模块的选择
采用一只红外对管置于小车左右侧。通过测试此种方案就能很好的实现小车避开障碍物,且充分的利用资源而不浪费。驅踬髏彦浃绥譎饴憂锦。
5、电源模块的选择
采用2个4支1.5V电池双电源分别给单片机与电机供电可解决问题且能让小车完成其功能。
第3章系统硬件的设计
3.1驱动电路的设计与原理分析
L298是SGS公司的产品,比较常见的是15脚MULTIWATT封装的L298N,内部同样包含4通道逻辑驱动电路。可以方便的驱动两个直流电机,或一个两相步进电机。猫虿驢绘燈鮒诛髅貺庑。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。锹籁饗迳琐筆襖鸥娅薔。
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V电压。4脚VS接电源电压,VS电压范围VIH为+2.5~46 V。输出电流可达2.5 A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动两台电动机。将引脚接输入控制电平,控制电机的正反转。ENA,ENB接控制使能端,控制电机的停转。構氽頑黉碩饨荠龈话骛。
在L298N的输出端分别正确的接上小车的左右两个直流电机,通过L298N的输出电流控制左右两个直流电机的停止或者前进,例如左轮不转右轮向前就做左转的动作,右轮不转左轮向前就做右转的动作,如图3.1和图3.2所示。輒峄陽檉簖疖網儂號泶。
图3.1 L298N引脚图
3.2信号检测模块的设计与原理分析
小车循迹原理是小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。笔者在该模
块中利用了简单、应用也比较普遍的检测方法——红外探测法。尧侧閆繭絳闕绚勵蜆贅。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号,再通过LM324作比较器来采集高低电平,从而实现信号的检测。避障亦是此原理。电路图如图3.3所示。识饒鎂錕缢灩筧嚌俨淒。
市面上有很多红外传感器,在这里我选用TCRT5000型光电对管。
图3.2驱动原理图
图3.3 循迹原理图
3.3主控电路的设计与原理分析
本模块主要是对采集信号进行分析,同时控制电机,起停。以及再检测到障碍做出反映的作用。其电路图如图。STC89C52是一种带8K字节闪烁可编程可檫除只读存储器(FPEROM-FLASH PROGRAMABLE AND ERASABLE READ ONLY MEMORY )的低电压,高性能COMOS8的微处理器,俗称单片机。该器件采用ATMEL搞密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。STC89C52RC单片机引脚图如图3.4所示。凍鈹鋨劳臘锴痫婦胫籴。
图3.4 STC89C52RC单片机引脚图
STC89C52RC具体介绍如下:
(1)主电源引脚(2根)
VCC(PIN40):电源输入,接+5V电源
GND(PIN20):接地线
(2)外接晶振引脚(2根)
XTAL1(PIN19):片内振荡电路的输入端
XTAL2(PIN20):片内振荡电路的输出端
(3)控制引脚(4根)
RST/VPP(PIN9):复位引脚,引脚上出现2个机器周期的高电平将使单片机复位。
ALE/PROG(PIN30):地址锁存允许信号
PSEN(PIN29):外部存储器读选通信号
EA/VPP(PIN31):程序存储器的内外部选通,接低电平从外部程序存储器读指令。
(4)可编程输入/输出引脚(32根)
STC89C52单片机有4组8位的可编程I/O口,分别位P0、P1、P2、P3口,每个口有8位(8根引脚),共32根。恥諤銪灭萦欢煬鞏鹜錦。
PO口(PIN39~PIN32):8位双向I/O口线,名称为P0.0~P0.7
P1口(PIN1~PIN8):8位准双向I/O口线,名称为P1.0~P1.7
P2口(PIN21~PIN28):8位准双向I/O口线,名称为P2.0~P2.7
P3口(PIN10~PIN17):8位准双向I/O口线,名称为P3.0~P3.7
STC89C52RC主要功能如表3.1所示。
表3.1 STC89C52RC主要功能
主要功能特性
兼容MCS51指令系统8K可反复擦写FLASH ROM
32个双向I/O口256X8BIT内部RAM
3个16位可编程定时/计数器中断时钟频率0-24MHZ
2个串行中断可编程UART串行通道
2个外部中断源共6个中断源
2个读写中断口线3级加密位
低功耗空闲和掉电模式软件设置睡眠和唤醒功能
3.4直流电机电路的设计与原理分析
+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为 IN1和IN2、IN3和IN4的使能端。IN1~ IN4:输入端,输入端电平和输出端电平是对应的。直流电机原理图如图3.5所示。鯊腎鑰诎褳鉀沩懼統庫。
图3.5 直流电机原理图主控电路如图3.6所示。
图3.6主控电路
第4章 软件功能程序及分析
在进行微机控制系统设计时,除了系统硬件设计外,大量的工作就是如何根据每个生产对象的实际需要设计应用程序。因此,软件设计在微机控制系统设计中占重要地位。对于本系统,软件更为重要。硕癘鄴颃诌攆檸攜驤蔹。
在单片机控制系统中,大体上可分为数据处理、过程控制两个基本类型。数据处理包括:数据的采集、数字滤波、标度变换等。过程控制程序主要是使单片机按一定的方法进行计算,然后再输出,以便控制生产。阌擻輳嬪諫迁择楨秘騖。
为了完成上述任务,在进行软件设计时,通常把整个过程分成若干个部分,每一部分叫做一个模块。所谓“模块”,实质上就是所完成一定功能,相对独立的程序段,这种程序设计方法叫模块程序设计法。模块程序设计法的主要优点是:氬嚕躑竄贸恳彈
瀘颔澩。
(1)单个模块比起一个完整的程序易编写及调试;
(2)模块可以共存,一个模块可以被多个任务在不同条件下调用; (3)模块程序允许设计者分割任务和利用已有程序,为设计者提供方便。 4.1主程序框图
图4.1 主程序框图
启动
循迹
是否检测到停止线
停止
是否检测到障碍
N
Y
避障
Y
N
4.2循迹模块
循迹框图如图4.2所示。
图4.2 循迹框图
循迹程序:
void fun1() //循迹子程序 {
if(P25==1&&P26==0&&P27==1) //直走 P11是车前 P10 是车后 dr=1;
if(P25==0&&P26==1&&P27==1) //左拐 dr=2;
if(P25==1&&P26==1&&P27==0) //右拐 dr=3;
if(P10==0||P11==0) //进入壁障标志口 dr=4;
switch(dr) {
case 1:P14=0,P15=1,P16=0,P17=1;break; //直走 case 2:P14=1,P15=0,P16=0,P17=1;break; // 左拐 case 3:P14=0,P15=1,P16=1,P17=0;break; //右拐 P14,P15,控制左电机釷鹆資
贏車贖孙滅獅赘。
开始
前进
扫描I/O 口,是否检
测到黑线
Y
左边 右
左转
右转
N
case 4:yy=1;
}
}
4.3避障模块
避障框图如图4.3所示。
前右有障碍物前左有障碍物
Y
图4.3 避障框图
避障程序:VOID FUN2()//壁障子程序
{
if(P10==0&&P11==1&&P12==0) // 两边测直走
{
P14=0,P15=1,P16=0,P17=1;
}
if(P10==0&&P11==0&&P12==1) // 左中测右走 {
P14=1,P15=0,P16=0,P17=1;//左拐
delay(1000);
}
if(P10==1&&P11==0&&P12==0) //右中测左走
传感器全部检
测到黑线
小车进入避障
模式
小车直行
小车左走小车右走
左、右或无障碍
小车直行
{
P14=0,P15=1,P16=1,P17=0; //右拐
delay(1000);
}
if(P10==0&&P11==0&&P12==0) //全测到直走{
P14=0,P15=1,P16=0,P17=1; //直走
}
if(P10==0&&P11==1&&P12==1)
{
P14=0,P15=1,P16=0,P17=1;//直走
}
if(P10==1&&P11==1&&P12==0)
{
P14=0,P15=1,P16=0,P17=1; //直走
}
if(P25==0&&P26==0&&P27==0) //车停
{
P14=1,P15=1,P16=1,P17=1; TR0=0;
}
}
结论
整个系统的设计以单片机为核心,利用了多种传感器,将软件和硬件相结合。本系统能实现如下功能:
(1)自动沿预设轨道行驶小车在行驶过程中,能够自动检测预先设好的轨道,实现直道和弧形轨道的前进。若有偏离,能够自动纠正,返回到预设轨道上来。怂阐譜鯪迳導嘯畫長凉。
(2)当小车探测到前进前方的障碍物时,可以自动报警调整,躲避障碍物,从无障碍区通过。小车通过障碍区后,能够自动循迹。谚辞調担鈧谄动禪泻類。
(3)自动检测停车线并自动停车。
从运行情况来看循迹的效果比较好,避障的效果不是很好,我认为是由于电源不能稳定而是的小车的速度不好控制,这也是我这次设计最大的误区,没有选取稳定的电源。我相信如果实验条件和时间的允许下我肯定能解决这一问题。嘰觐詿缧铴嗫偽純铪锩。
致谢
历时三个月的毕业设计已经告一段落。经过自己不断的努力以及老师的耐心指导和热情帮助,本设计已经基本完成。在这段时间里,老师严谨的治学态度和热忱的工作作风令我十分钦佩,她的指导使我对整个毕业设计的思路有了总体的把握,并耐心的帮我解决了许多实际问题,使我有了很大收获,本论文也是在老师的指导下修改完成的。在此,我要对他表示由衷的感谢,同时也感谢在整个毕业设计中所有帮助过我的人。通过这次毕业设计,我深刻地认识到了学好专业知识的重要性,也理解了理论联系实际的含义,并且检验了大学三年的学习成果。这三个月的设计是对过去所学知识的系统提高和扩充过程,为今后的发展打下了良好的基础。虽然在这次设计中对于知识的运用和衔接还不够熟练,但是我将在以后的工作和学习中继续努力、不断完善。由于自身水平有限,设计中一定存在很多不足之处,敬请各位老师批评指正。熒绐譏钲鏌觶鷹緇機库。
本设计能够顺利完成,还承蒙老师以及身边的很多同学的指导和帮助。在设计过程中,老师给予了悉心的指导,最重要的是给了我解决问题的思路和方法,并且在设计环境和器材方面给予了大力的帮助和支持,在此,我对老师表示最真挚的感谢。同时感谢所有帮助过我的同学。鶼渍螻偉阅劍鲰腎邏蘞。
感些评阅老师百忙之中抽出时间对本论文进行了评阅。
参考文献
[1]郭惠,吴迅.单片机C语言程序设计完全自学手册[M].电子工业出版社,2008.10:1-200.纣忧蔣氳頑莶驅藥悯骛。
[2]王东锋,王会良,董冠强. 单片机C语言应用100例[M]. 电子工业出版
社,2009.3:145-300.颖刍莖蛺饽亿顿裊赔泷。
[3]韩毅,杨天. 基于HCS12单片机的智能寻迹模型车的设计与实现[J].学术期刊,2008,29(18):35-40.濫驂膽閉驟羥闈詔寢賻。
[4]王晓明. 电动机的单片机控制[J]. 学术期刊,2002,13(15):22-25.
[5]何立民.单片机应用技术选编[M].北京:北京航空大学出版社,1998.
[6]李华.MCS-51系列单片机使用接口技术[M].北京:北京航空航天大学出版社,1993.
[7]王千.实用电子电路大全[M].电子工业出版社,2001.
[8]Yamato I , New conversion system for UPS using high frequency link[J]1 IEEE PESC ,1988 :10-20.銚銻縵哜鳗鸿锓謎諏涼。
[9]Yamato I ,High frequency link DC/ AC converter for UPS with a new voltage clamper[J]1IEEE PESC ,1990 :52-105.挤貼綬电麥结鈺贖哓类。
[10]白驹珩、雷晓平.单片计算机及其应用[M].成都:电子科技大学出版社,2005
[11]李广弟.单片机基础[M].北京:北京航空航天大学出版社,2006
[12]沈美明、温冬婵.IBM汇编语言程序设计[M].北京:清华大学出版社,2004
[13]彭传正、林春景.凌阳单片机原理与实践[M].北京:北京航空航天大学出版社,2006
[14]李荣正、陈学军.PIC单片机实践教程[M].北京:北京航空航天大学出版社,2006
[15]阎石.数字电子技术基础[M].北京:高等教育出版社,2007
基于单片机的红外遥控智能小车设计报告
基于单片机的红外遥控智能小车设计报告
毕业设计(论文)题目:基于单片机的红外遥控智能小车
西安邮电学院 毕业设计(论文)任务书 学生姓名指导教师职称工程师学院电子工程学院系部光电子技术 专业光电信息工程 题目基于单片机的红外遥控智能小车 任务与要求 任务:以51单片机为控制核心,实现具有自动避障、加速、减速等功能的红外遥控智能小车。 要求:1 搜集资料,熟悉单片机开发流程;熟悉红外传感器等相关器件; 掌握单片机接口和外围电路应用;具备一定的单片机开发经 验。 2 学会电路设计、仿真等相关软件的使用; 3 具备一定的硬件调试技能。 4 学会查阅资料; 5 学会撰写科技论文。 开始日期2010年3月22日完成日期2010年6月27日主管院长(签字) 年月日
西安邮电学院 毕业设计 (论文) 工作计划 学生姓名赵美英指导教师崔利平职称工程师学院电子工程学院系部光电子技术 专业光电信息工程 题目基于单片机的红外遥控智能小车 工作进程
主要参考书目(资料) 1、何立民,单片机应用系统设计,北京:航天航空大学出版社; 2、李广弟,单片机基础,北京:北京航空航天大学出版社,2001; 3、何立民,MCS-51系列单片机应用系统设计系统配置与接口技术,北 京航空航天大学出版社,1990.01; 4、赵负图,传感器集成电路手册,第一版,化学工业出版社,2004; 5、Atmel.AT89S51数据手册.https://www.360docs.net/doc/ce17901104.html, 主要仪器设备及材料 1.普通计算机一台,单片机开发环境; 2.电路安装与调试用相关仪器和工具。 (如示波器、万用表、电烙铁、镊子、钳子等)。 论文(设计)过程中教师的指导安排 每周四进行交流与总结;其余时间灵活安排,及时解决学生问题。 对计划的说明 依学生实际情况,适当调整工作进度。
智能车毕业设计论文
智能车毕业设计论文 【篇一:智能小车毕业设计论文终极版】 毕业设计(论文) 基于单片机的智能小车设计 design of the smart car based on scm 长春工程学院 摘要 本寻迹小车是以自己制作的小车作为车的车架,80c51单片机为控 制核心,加以步进电机、光电传感器和电源电路以及其他电路构成。系统由80c51通过io口控制小车的前进后退以及转向。在该系统中,由红外光电传感器实现路径识别,通过对小车速度的控制,使小车 能按照任意给定的黑色引导线平稳地寻迹。实验证明:系统能很好 地满足寻迹小车对路径识别性能和抗干扰能力的要求,速度调节响 应时间快,稳态误差小,具有较好的动态性能。 关键词 80c51 直流电机光电传感器自动寻迹小车 abstract: the smart car is aluminum alloy for the chassis, 80c51 mcu as its core, including stepper motor, plus photoelectric sensors, as well as other flame sensor and power circuit. mcu controls the car turning back forward or running on the white line. rpr220 reflective photo sensor seeks the trace. far infrared flame sensor tracks the flame. in addition, the scm system with sunplus for voice broadcast can remind current status. the system transmits information through df module. the car’s status will be transmitted to the remote console. ocmj4x8c lcd display and 2 keys for start control. keywords: 80c51 dc motor photo sensor self-guiding model car 目录 1 引 言 ....................................................................................................... (1) 2 总体方案设 计 ....................................................................................................... .. (2)
基于51单片机设计智能避障小车
单片机设计智能避障小车 摘要 利用红外对管检测黑线与障碍物,并以STC89C51单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由L298N 驱动电路完成,速度由单片机输出的PWM波控制。本文首先介绍了智能车的发展前景,接着介绍了该课题设计构想,各模块电路的选择及其电路工作原理,最后对该课题的设计过程进行了总结与展望并附带各个模块的电路原理图,和本设计实物图,及完整的C语言程序。 关键词:智能小车;51单片机;L298N;红外避障;寻迹行驶 abstract Using infrared detection black and obstacles to the line and STC89C51 microcontroller as the control chip to control the speed of the electric car and steering, so as to realize the function of automatic tracking and obstacle avoidance. Which the car driven by the L298N driver circuit is completed, the speed of the microcontroller output PWM wave control. This article first introduces the development of the intelligent car prospect, then introduces the design idea, the subject selection of each module circuit and working principle of the circuit, the design process of the subject is summarized and prospect with each module circuit principle diagram, and the real figure design, and complete C language program. Key words: smart car; 51 MCU; L298N; infrared obstacle avoidance; track driving
基于单片机的智能小车的设计与制作
序号: 4 编码:甲4B02704B 第十一届“挑战杯” 河南省大学生课外学术科技作品竞赛 作品申报书 作品名称:基于单片机的智能小车的设计与制作 学校全称:平顶山学院 个人申报者姓名 (集体名称):闫翔 指导老师姓名:王艳辉 类别: □自然科学类学术论文 □哲学社会科学类社会调查报告和学术论文 □科技制作 小发明创造
基于单片机的智能小车的设计与制作 摘要:随着电子技术、计算机技术和制造技术的飞速发展,智能技术必将迎来它的发展新时代,我们想如果能将其运用到煤矿勘测,环境信息采集等方面,将会更好地满足人们的需求。因此,我们设计了这款智能小车。该设计采用STC89C52单片机为控制核心,采用驱动芯片 L298N构成双H桥控制直流电机,利用传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,自动寻迹和寻光等功能。在软件设计方面,则分为三个模块,即数据采集模块,信号处理模块,控制器控制电机模块。其中软件系统采用C程序,整个系统的电路结构简单,容易实现,可靠性能高。此设计实现了小车的无人驾驶,通过对路面的检测,由单片机来判断控制小车,使其变得智能化,实现自动的前进,转弯,停止功能.此系统完善后可以应用到道路检测,安全巡逻中,同时,可以以此为基础,将其应用到生活或者工业制造中去,即增添我们的生活乐趣也提高了工业效率,最重要的是能降低工作中的危险性。 关键词:单片机;自动循迹;驱动电路
目录 1绪论 (4) 1.1本课题的研究的背景以及现实意义 (4) 1.2课题研究的目的和意义 (6) 1.3本设计的研究方向 (6) 2 方案设计 (7) 2.1小车车体的选用 (7) 2.2 主控芯片的选用 (7) 2.3 PWM调速系统的实现 (8) 2.4 系统原理图 (9) 3 系统的硬件设计 (11) 3.1单片机电路的设计 (11) 3.1.1单片机的功能特性描述 (11) 3.1.2晶振电路 (12) 3.1.3复位电路 (13) 3.2红外线循迹避障模块 (14) 3.2.1黑线循迹模块 (14) 3.2.2避障模块设计 (15) 3.3 声控模块 (16) 3.4 比较模块 (16) 3.5 测速模块和循光模块 (17) 3.6 电源模块 (18)
智能小车毕业论文完整版
智能小车毕业论文完整 版 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
学士学位论文 系别:计算机科学与技术 学科专业:计算机科学与技术 姓名: @@@@ @@@ 2011年 06月
智能小车引导控制系统 的设计与实现 系别:计算机科学与技术 学科专业:计算机科学与技术 指导老师: @@@ 姓名: @@@ @@@ 2011年 06月
智能小车引导控制系统的设计与实现 摘要:面对诸多恶劣的工作环境(如灭火、救援等),为了有效的避免人员伤亡,就需要采用智能小车去现场来完成相应的任务。因此研究和开发智能小车引导控制系统具有十分重要的意义。本系统采用STC89C51单片机作为核心控制芯片,设计制作了一款通过红外光电传感器检测路径信息、红外火焰传感器检测火源的智能寻迹灭火小车。本系统由单片机控制模块、寻迹传感器模块、驱动电机模块、火源传感器模块、风扇模块、电源模块等组成。实际应用表明,该小车可以在专门设计的场地上实现自主发现火源,自主识别路线,自主行进接近火源并灭火,最终完成灭火的任务。 关键词:单片机小车引导控制传感器
Smart cars guide control system design and implementation Abstract: Confronted with so many bad working environment (such as fire fighting, rescue etc), in order to effectively avoid casualties, need to use intelligent go by car scene to complete relevant tasks. Therefore, the research and development of intelligent car guide control system has the extremely vital significance. This system uses STC89C51 as the core control chip, design and make a new electric sensor detection by infrared sensor information, infrared flame path of intelligent tracing test fire extinguishing car. The system is composed of single-chip microcomputer control module, tracing sensor module, drive motor module, ignition sensor module, fan module, power supply module. The practical application indicates that the car can be in a specially designed field on fire, to realize the independent found autonomous recognition route, independent sources and marching close to the fire extinguishing, finally complete task. Keywords: Microcontroller Car Control system Sensors
无线遥控玩具小车设计与制作
“发明杯”大学生创新大赛作品题目: 无线遥控玩具小车设计与制作
目录 摘要 (1) 引言 (3) 1 方案设计与论证 (4) 1.1 直流调速系统 (4) 1.2 防碰撞系统 (5) 1.3 显示系统 (5) 2 硬件设计 (5) 2.1 小车系统框图 (5) 2.2 单片机最小系统设计 (6) 2.3 电机驱动电路设计 (7) 2.4 遥控发射接收电路设计 (9) 2.4.1 无线发送电路 (10) 2.4.2 无线接收电路 (11) 2.5 检测系统设计 (11) 2.5.1 速度检测设计 (11) 2.5.2 防跌落系统设计 (12) 2.5.3 防碰撞系统设计 (13) 2.6 显示电路设计 (13) 2.7 单片机I/O口的分配 (14) 2.8 电源设计 (14) 2.9 小车车体设计 (14) 3 软件设计 (15) 3.1 主程序设计 (15) 3.2 PWM子程序设计 (17) 3.3 遥控子程序 (18) 3.4 防跌落、碰撞子程序 (20) 3.5 显示子程序 (21) 4 结果分析及结论 (22) 5 谢辞 (23)
6 参考文献 (23) 附件1 程序清单 (24) 附件2 硬件电路图 (33) 附件3 电路PCB图 (34)
无线遥控玩具小车设计与制作 摘要:80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评,该课题的基本思想是设计一台能够遥控行走并自动回退防止跌落的机器小车。遥控接收端以 80C51 单片机为控制核心,其中数据的发射和接收部分通过无线通讯模块完成。可通过发射端来控制小车的直流电机实现无极调速, 遥控小车进行转向, 并能在液晶上显示出小车的实时速度值。小车还能自动检测落差较大的落差,遇到楼梯等低处会自动回避,以防止小车由高处摔落。 关键词:80C51单片机、PWM调速、遥控小车
单片机应用-智能小车设计
智能小车设计
所谓智能系统,应该是在没有人为因素干预下,能够完全的或者部分的对外部刺激因素做出适当响应的系统。通常这种系统无论复杂还是简单,其硬件结构都可以分为传感、控制以及执行三个部分,好比人的各种感官、大脑以及四肢。下面就从这三个方面进行智能小车的设计,该小车具备自动循迹能力(非人为控制下按照指定路线行走),并且随着不同传感器的加入,能够完成更多的功能,比如壁障、走迷宫、寻光、通过电脑及手机等上位机控制等等。 一、控制部分: 图1 单片机最小系统原理图
图2 控制信号输入部分原理图
图3 控制部分电源输入开关 图4 显示接口 图5 DS18B20/1838一体化接口及ISP接口
该智能小车整个控制部分电路原理如以上5个图所示,可分为主控芯片最小系统、控制信号输入、电源以及各类接口四个部分。 1.主控芯片最小系统: 在本设计中所使用的主控芯片为51系列单片机,为保证其正常工作所必需的外围电路包括晶振电路、复位电路以及P0口上拉电阻。当然以上三个部分只能保证单片机正常运转,但若只是这样基本没有什么实际意义,根据不同的任务要求,需要让单片机在适当的引脚上连接相应的设备。这里结合智能小车所需的功能以及未来方便扩展的需要,除了设置4个3头插针连接红外光电开关、舵机(距离探测时会用到)以及给其他传感器供电外,还将单片机P0、P1、P2、P3口用排针引出,其中P1使用双排针,一排与8个LED灯相连,可在日后测试时方便观察信号变化。具体连接如图1所示。 2. 控制信号输入部分: 51系列单片机接收外部信号无非通过两个渠道,一个是其4个并行的I/O口,另一个就是其自带的串口,相较之下,串行口的拓展能力更强一些。如图2所示,在本设计中,利用单片机的I/O口设置了4个按键进行人机交互,同时在其串口上连接了一块USB/串口转换芯片PL2303。 PL2303: 是Prolific 公司生产的一种高度集成的RS232-USB 接口转换器,可提供一个RS232 全双工异步串行通信装置与USB 功能接口便利联接的解决方案。该器件内置USB 功能控制器、USB 收发器、振荡器和带有全部调制解调器控制信号的UART,只需外接几只电容就可实现USB 信号与RS232 信号的转换,能够方便嵌入到各种设备,该器件作为USB/RS232 双向转换器,一方面从主机接收USB 数据并将其转换为RS232 信息流格式发送给外设;另一方面从RS232 外设接收数据转换为USB 数据格式传送回主机。这些工作全部由器件自动完成,开发者无需考虑固件设计。PL2303 的高兼容驱动可在大多操作系统上模拟成传统COM 端口,并允许基于COM 端口应用可方便地转换成USB 接口应用,通讯波特率高达 6 Mb/s。 该器件具有以下特征:完全兼容USB1.1 协议;可调节的3~5 V 输出电压,满足3V、3.3V 和5V 不同应用需求;支持完整的RS232 接口,可编程设置的波特率:75b/s~6 Mb/s,并为外部串行接口提供电源;512 字节可调的双向数据缓存;支持默认的ROM 和外部EEPROM 存储设备配置信息,具有I2C 总线接口,支持从外部MODEM信号远程唤醒;支持Windows98, Windows2000,WindowsXP 等操作系统;28 引脚的SOIC 封装。
电动智能小车(完整论文)
摘要 80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。这里介绍的是如何用80C51单片机来实现长春工业大学的毕业设计,该设计是结合科研项目而确定的设计类课题。本系统以设计题目的要求为目的,采用80C51单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹和寻光功能。整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。 采用的技术主要有: (1)通过编程来控制小车的速度; (2)传感器的有效应用; (3)新型显示芯片的采用. 关键词80C51单片机、光电检测器、PWM调速、电动小车
Design and create an intelligence electricity motive small car Abstract 80C51 is a 8 bit single chip computer. Its easily using and multi-function suffer large users. This article introduces the CCUT graduation design with the 80C51 single chip computer. This design combines with scientific research object. This system regards the request of the topic, adopting 80C51 for controlling core, super sonic sensor for test the hinder. It can run in a high and a low speed or stop automatically. It also can record the time, distance and the speed or searching light and mark automatically the electric circuit construction of whole system is simple, the function is dependable. Experiment test result satisfy the request, this text emphasizes introduced the hardware system designs and the result analyze. The adoption of technique as: (1)Reduce the speed by program the engine; (2)Efficient application of the sensor; (3)The adoption of the new display chip. Keywords 80C51 single chip computer, light electricity detector, PWM speed adjusting, Electricity motive small car
基于单片机的红外遥控智能小车毕业设计报告
毕业设计(论文)题目:基于单片机的红外遥控智能小车
西安邮电学院 毕业设计(论文)任务书 学生姓名指导教师职称工程师学院电子工程学院系部光电子技术 专业光电信息工程 题目基于单片机的红外遥控智能小车 任务与要求 任务:以51单片机为控制核心,实现具有自动避障、加速、减速等功能的红外遥控智能小车。 要求:1 搜集资料,熟悉单片机开发流程;熟悉红外传感器等相关器件; 掌握单片机接口和外围电路应用;具备一定的单片机开发经验。 2 学会电路设计、仿真等相关软件的使用; 3 具备一定的硬件调试技能。 4 学会查阅资料; 5 学会撰写科技论文。 开始日期2010年3月22日完成日期2010年6月27日主管院长(签字) 年月日
西安邮电学院 毕业设计 (论文) 工作计划 学生姓名赵美英指导教师崔利平职称工程师学院电子工程学院系部光电子技术 专业光电信息工程 题目基于单片机的红外遥控智能小车 工作进程
主要参考书目(资料) 1、何立民,单片机应用系统设计,北京:航天航空大学出版社; 2、李广弟,单片机基础,北京:北京航空航天大学出版社,2001; 3、何立民,MCS-51系列单片机应用系统设计系统配置与接口技术,北京航 空航天大学出版社,1990.01; 4、赵负图,传感器集成电路手册,第一版,化学工业出版社,2004; 5、Atmel.AT89S51数据手册.https://www.360docs.net/doc/ce17901104.html, 主要仪器设备及材料 1.普通计算机一台,单片机开发环境; 2.电路安装与调试用相关仪器和工具。 (如示波器、万用表、电烙铁、镊子、钳子等)。 论文(设计)过程中教师的指导安排 每周四进行交流与总结;其余时间灵活安排,及时解决学生问题。 对计划的说明 依学生实际情况,适当调整工作进度。
基于光电传感器自动循迹小车设计
基于光电传感器自动循迹 小车设计 The Standardization Office was revised on the afternoon of December 13, 2020
摘要 制作自动寻迹小车所涉及的专业知识包括控制、模式识别、传感技术、汽车电子、电气、计算机、机械等诸多学科。为了使小车能够快速稳定的行驶,设计制作了小车控制系统。在整个小车控制系统中,如何准确地识别路径及实时地对智能车的速度和方向进行控制是整个控制系统的关键。 由于此小车能够自动寻迹,加速,减速.故又被称作为智能车.本智能车控制系统设计以MC9S12XS128微控制器为核心,通过两排光电传感器检测小车的位置和运动方向来获取轨道信息,根据轨道信息判断出相应的轨道类型,并分配不同的速度给硬件电路加以控制,完成了在变负荷条件下对速度的快速稳定调节。红外对射传感器用于检测智能车的速度,以脉宽调制控制方式(PWM)控制电机和舵机以达到控制智能车的行驶速度和偏转方向。 软件是在CodeWarrior 的环境下用C语言编写的,用PID控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。智能车能够准确迅速地识别特定的轨道,并沿着引导线以较高的速度稳定行驶。 整个智能车系统涉及车模机械结构的改装、传感器电路设计及控制算法等多个方面。经过多次反复的测试,最终确定了现有的智能车模型和各项控制参数。 关键词: MC9S12XS128;PID;PWM;光电传感器;智能车
ABSTRACT Making automatic tracing car involved the professional knowledge including control, pattern recognition, sensing technology, automobile electronics, electrical, computer, machinery and so on many subjects. According to the technical requirements of the contest, we design the intelligent vehicle control system. In the entire control system of the smart car, how to accurately identify the road and real-time control the speed and direction of the Smart Car is the key to the whole control system. Because this car can automatic tracing, accelerate, slowing down. So it is also known as intelligent car this intelligent vehicle control system design take the MC9S12XS128 micro controller as a core, examines car's position and the heading through two row of photoelectric sensors gains the racecourse information, judges the corresponding racecourse type according to the racecourse information, and assigned the different speed to control for the hardware circuit, has completed in changes under the load condition to the speed fast stable adjustment. The infrared correlation sensor uses in examining the intelligent vehicle's speed, (PWM) controls the electrical machinery and the servo by the pulse-duration modulation control mode achieves the control intelligence vehicle's moving velocity and the deflection direction. The software is under the CodeWarrior environment with the C language compilation, actuates electrical machinery's rotational speed and servo's direction with the PID control algorithm adjustment, completes to the model vehicle velocity of movement and the heading closed-loop control. The intelligent vehicle can distinguish the specific racecourse rapidly accurately, and along inlet line by the high speed control travel. The entire intelligent vehicle system involves the vehicle mold mechanism the re-equipping, the sensor circuit design and the control algorithm and so on many aspects. After the repeated test, has determined the existing intelligent vehicle model and each controlled variable finally many times. Keywords: MC9S12XS128; PID;PWM;photoelectric sensor; smart car
智能小车控制系统设计
智能小车控制系统设计 ——ARM控制模块设计 EasyARM615是一款基于32位ARM处理器,集学习和研发于一体的入门级开发套件,该套件采用Luminary Micro(流明诺瑞)公司生产的Stellaris系列微控制器LM3S615。本系统设计是以EasyARM615开发板为核心,通过灰度传感器检测路面上的黑线,运用PWM直流电机调速技术,完成对小车运动轨迹等一系列的控制。同时利用外扩的液晶显示器显示出各个参数。以达到一个简易的智能小车。 本文叙述了系统的设计原理及方法,讨论了ISR集成开发环境的使用,系统调试过程中出现的问题及解决方法。 据观察,普通的玩具小车一般需要在外加条件下才能按照自己的的设想轨迹去行驶,而目前可借助嵌入式技术让小车无需外加条件便可完成智能化。在小车行驶之前所需作的准备工作是在地面上布好黑线轨迹,设计好的小车便可按此黑线行驶,即为智能小车。其设计流程如下: 1、电机模块 采用由达林顿管组成的H型PWM电路。PWM电路由四个大功率晶体管组成,H桥电路构成,四个晶体管分为两组,交替导通和截止,用单片机控制达林顿管使之工作在开关状态,根据调整输入控制脉冲的占空比,精确调整电机转速。这种电路由于管子工作只在饱和和截止状态下,效率非常没。H型电路使实现转速和方向的控制简单化,且电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调整技术。 具体电路如下图所示。本电路采用的是基于PWM原理的H型驱动电路。该电路采用TIP132大功率达林顿管,以保证电动机启动瞬间的8安培电流要求。
2、传感器模块 灰度测量模块,是一种能够区分出不同颜色的的电子部件。灰度测量模块是专为机器人设计的灰度传感器。例如:沿着黑色轨迹线行走,不偏离黑色轨迹线;沿着桌面边沿行走,不掉到地上,等等。足球比赛时,识别场地中灰度不同的地面,以便于进行定位。不同的物体对红外线的反射率不同,黑色最低,白色最高;它通过发射红外线并测量红外线被反射的强度来输出反映物体颜色的电压信号,有效距离3-30毫米。 其技术规格如下: 已知灰度传感器的输出电压为0-3.3V,所以可通过ARM615开发板上的ADC 模块转换成数字信号,最后通过不断测试得出黑线与白线的大概参数值,完成对小车传感器部分的设计。 在本次设计中选择二个灰度传感器,其实现效果与布局如下所示。
基于单片机遥控小车的设计
基于单片机遥控小车的设计 摘要 随着电子业的发展,自动化已不再是一个新鲜的话题,无人驾驶的遥控小汽车也必将进入实用阶段,智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。智能电动车就是其中的一个体现。本系统模拟基于51单片机的遥控小车的设计。89C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。这里介绍的是如何用89C51单片机来实现无线遥控小车的毕业设计,该设计是结合实际应用而确定的设计类课题。本系统以设计题目的要求为目的,采用89C51单片机为控制核心,采用L298N对小车电机的控制,利用以PT2262/PT2272芯片的无线遥控模块装置,本次设计基于完备的软硬件系统,很好的实现了电动小汽车的前后行进,特定路径的行驶,以及停车。整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析 关键词:单片机;无线控制技术;PWM调速;L298N;PT2262/2272。
The Design of Remote Control Car Based On MCU Abstract Along with the development of electronic, automation is not a fresh word any more, and no-man controlled cars will be realized. The new invention of modern intelligence, is a future of development, he can follow the pattern set in advance in an environment where automatic operation, no human's management, used in scientific exploration and so on. Smart electric car is one of expression. That system is based on the design of 51 MCU controlled car. 89C51 MCU is eight-figure microcontroller, which receives high praise from the users because of its easy use and versatility. This graduation design introduces how 89C51 MCU realize the remote control of the car, a combination of the practical application and design. This system designs for the purpose of the topic request, using 89C51 MCU as control core, the car motor control by L298N,and wireless remote control which chip PT2262/2272 device, with the electric car, driving, and the particular path park. The whole system of the circuit structure is simple and reliable. This paper introduces the hardware design method of the system and the analysis of the test results. Keyword: MCU; Wireless Remote Control; PWM speed adjusting;L298N;PT2262/2272
智能小车控制系统开题
毕业设计(论文)开题报告 题目智能小车控制系统研究 系部车辆工程系 专业 学生姓名学号 指导教师职称讲师 毕设地点 2016年1 月16 日
1.结合毕业设计(论文)课题任务情况,根据所查阅的文献资料,撰写1500~2000字左右的文献 综述: 一丶选题背景 智能汽车的概念在上世纪80 年代初由美国提出,随着智能控制算法的不断发展,以及硬件设备的快速更新,对智能车的发展起到了巨大的促进作用。同时交通问题也逐渐成为世界各个国家都要面临的重要问题,这也加快了新技术、新方法的应用。在这样的背景下智能车的研究逐渐成为新的热点。 当前世界公路的总里程每年都在高速增长,同时汽车的总量也在成倍增加,其中我国的增量更是非常明显,随着汽车的越来越多,出现交通事故的概率也在不断提高。世界各国为了解决这方面的问题提出了很多的想法,而智能车是众多想法中最可行的一种解决当前问题的方法。许多国家在无人驾驶汽车和智能交通系统的研究上都取得了不错的成果,有些研究结构已经研制成功了智能车的原型,并进行相关试验。最近10 年在传统汽车中半导体和电子技术应用的越来越多。汽车产业已经进入到了电子时代,智能汽车将是未来的发展趋势。根据相关部门的统计数据,2012 年之后生产的汽车,汽车上电子装置系统占整个汽车总成本超过30%,甚至在一些配置较高的汽车上,比重超过50%。 随着改革开放的不断深入,我国经济在过去的一段时间迅速崛起,人民的生活水平和幸福指数每年都在提高,拥有一辆汽车也不在是一个的梦想,而是变成了一个很多家庭都能消费的起的代步工具,当前我国的汽车数量,每年以两位数增长,然而我国的公共配套却相对落后,这就造成了我国严重的交通问题,道路拥挤十分严重,出现了开车不如骑车快的现象。 因此发展智能车和智能交通系统,是解决现有问题的一种有效的方法,通过不断的研究会在交通拥堵、减少事故方面起到十分显著的作用。未来通过无人驾驶技术,实现汽车的自动行驶,对于我国汽车、控制、电子等领域在新时期提高国际竞争力和自主创新能力有着重要的作用。 智能汽车控制系统的研究是一项复杂的系统工程,其中包含了机械、电子、自动循迹、自适应控制、机器人技术、传感器技术等多学科相互交融的一项研究。智能车通过多个传感器模块的协同工作,经过控制单元进行决策实现汽车的自动行驶、最优化路径等功能。 同时无人驾驶智能车在货运、农业生产、军事等领域具有很好的应用前景。 综上所述,发展智能汽车控制技术能够提高我国在微电子技术、人工智能、电机控制等新技术领域的技术水平。同时随着智能汽车的不断发展也能够有效的改善现有的交
智能小车本科毕业论文
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。
学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期: 摘要 随着社会各行各业的迅速发展,根据人类的需求出现了各种各样的智能机器人、智能车。智能小车又称为移动式机器人,是一个多种高新技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,伴着我国科学技术的进步,智能化和自动化技术越来
遥控小汽车的毕业设计研究
摘要 根据题目要求,本设计采用2片AT89C52单片机构成主从式的控制系统,双机采用串行口进行通信。红外遥控部分采用遥控车模专用编、解码芯片TX-2/RX-2,提高控制的可靠性;同时,在遥控发射端加入了用凌阳61板做的语音识别系统,能够完成语音遥控功能。采用红外传感器进行里程检测;超声波传感器进行障碍识别;感光电阻辅以步进电机控制的转动机构进行光源方向的检测,并能用软件控制小车行驶到光源附近。采用步进电机对小车的转向进行精确的控制,同时用红外传感器对转向的角度进行校正。此外,采用四位LED数码管和若干LED发光二极管显示时间、行进的里程以及小车的各种状态;采用AT24C08串行EEPROM记录小车的行驶轨迹,并能按照所记录的轨迹自动行驶。 本次设计基于完备的软硬件系统,很好的实现了小车语音遥控、任意曲线行驶、路线记录与重放、自动查找光源、自动避障,里程统计并发出指示信息等功能。 关键词:单片机;超声波传感器;红外遥控;语音识别;凌阳61板
ABSTRACT According to the topic, my design needs to adopt two AT89C52 to form a control system of principal and subordinate. The communication between the two MCU is to adopt the serial port. Meanwhile, launch end join with insult male genital 61 sound recognition system that board make remotely, can finish the remote control function of the pronunciation, and it adopts the infrared sensor to measure the mileage; The ultrasonic sensor carries on the obstacle to discern; Sensitization resistance complement in order to walk into whom electrical machinery control rotate organization carry on measuring, direction of the light source, The small car can go to the adjacent place of the light source with the software .The design adopts serial EEPROM of AT24C08 to write down the orbit of the car , and can repeat the route automatically which has been recorded. The Design is on the basis of the complete software and hardware system, and the small car has the function of sound remote control, following any curve, recording the route where it has gone, finding out the light source, etc… Keywords: MCU; AT24C08; sensor; SPCE061A