回波的产生与消除
一、回波的产生与消除
【设计原理】
1、声音信号x 的产生:
声音信号x ,既可以从现成的声音文件(.wav )中获取;也可以利用MATLAB 录音命令现行录制(可自行设置采样频率等录音参数)。
2、带回声的声音信号y 产生:
带回声的声音信号,可以表达为在原信号的基础上叠加其延时衰减的分量。假设只有一个回声的情况下,可简化其模型为:
y(n)=x(n)+ax(n-N) (式1)
a 为反射系数;N 为延迟时间。
思考: 分别改变反射系数a 和延迟时间N 的大小,播放产生的回声信号y ,分析反射系数a 和延迟时间N 对原始声音的影响。
3、回声消除
如何从信号y 中恢复出信号x ?即是(式1)的一个逆向求解过程。因此回声消除的关键可以通过(式1)的模型建立从信号y 中恢复信号x 的模型。只要恢复模型建立,即可将信号y 作为输入信号,求得恢复后的信号x ’。
4、从信号y 中估计反射物的距离
从信号y 中估计反射物的距离,可理解为估计(式1)中的N 。也就是,估计y(n)中的原始声音信号x(n)与其延时衰减分量ax(n-N)的相关联的程度。下面简单介绍一下信号相关的概念。
在统计通信及信号处理中,相关的概念是一个十分重要的概念。相关函数和信号的功率谱有密切关系。所谓相关是指两个确定信号或两个随机信号之间的相互关系,对于随机信号,信号一般是不确定的,但是通过对它的规律进行统计,它们的相关函数往往是确定的,因而在随机信号处理中,可以用相关函数来描述一个平稳随机信号的统计特性。
已知x(n)和y(n)是两个实数序列,它们的自相关函数
,[]x x n φ、,[]y y n φ,及互相关函数,[]x y n φ分别定义为:
,,,[][][][][][][][][]
x x m y y m x y m n x m n x m n y m n y m n x m n y m φφφ∞=-∞∞=-∞∞=-∞=
+=
+=
+∑∑∑ (式2) 考虑如何利用相关性从信号y 中估计反射物的距离。 源程序及输出结果展示:
[x,fs]=wavread('ak47.wav');%读出信号
n=5000;c=0.6;%c 为反射系数,可控制回声声强大小
g=zeros(1,n+1);%1*n+1阶零矩阵
g(1)=1;%令第一个元素为1
x1=conv(g,x);%g 与x 做卷积,形成原始信号
h=zeros(1,n+1);%1*n+1阶零矩阵
h(n+1)=1;%令第n+1个元素为1
x2=c*conv(h,x);%h与x做卷积再与反射系数相乘,形成回声信号y=x1+x2;%信号叠加
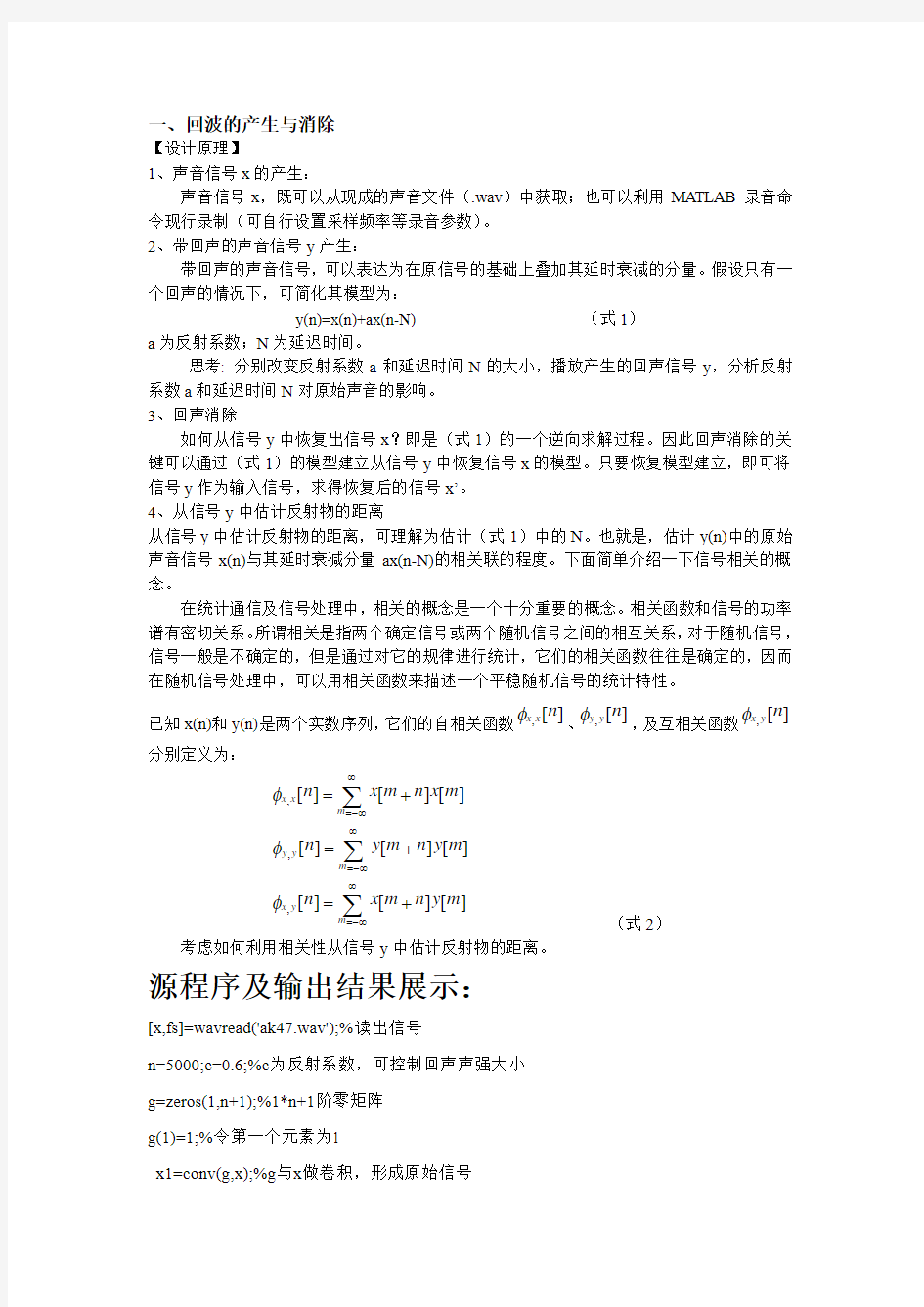
figure(1);%创建图形1
subplot(3,1,1);
plot(x1);title('原始信号');%画出原始信号波形
subplot(3,1,2);
plot(x2);title('回声信号');%画出回声信号波形
subplot(3,1,3);
plot(y);title('叠加信号');%画出叠加信号
figure(2);
subplot(4,1,1);
plot(abs(x));title('原始信号幅值');%画出原始信号幅值subplot(4,1,2);
plot(angle(x));title('原始信号相位');%画出原始信号相位subplot(4,1,3);
plot(abs(y));title('叠加信号幅值');%画出叠加信号幅值subplot(4,1,4);
plot(angle(y));title('叠加信号频谱');
b=1;
a(1)=1;%令矩阵a的第一个元素为1
a(n+1)=2;%令矩阵a的最后一个元素为0.4
z1=filter(b,a,y);%从y中滤出产生滤波信号
z=z1(1:length(x));
g=xcorr(y);%产生自相关g
figure(3);
subplot(3,1,1);
plot(abs(g));title('y的自相关函数');
n1=10000;
n2=25000;
n3=50000;
g1=g(n1:n2);%第一个极值点的大概区间
[r1,t1]=max(g1');%找出峰值及坐标
g2=g(n2:n3);%第二个极值点大概区间
[r2,t2]=max(g2');%找出峰值及坐标
subplot(3,1,2);
plot(g1);title('原声音信号极值点1')
subplot(3,1,3);
plot(g2);title('回声信号自相关极值点')
t2= t2+n2-t1-n1%回声与原始声音之间的距离,也为相差采样点数t3=t2/fs%声音传到障碍物的时间
n=r2/r1;%自相关函数衰减幅度
figure(4)
subplot(3,1,1);
plot(y);%画出带回声信号
title('带回声信号');
subplot(3,1,2);
plot(z);%画出去除回声后的信号title('去除回声信号');
subplot(3,1,3);
plot(x);%画出原始信号
title('原始信号')
sound(x1,fs);%原始信号pause(5)
sound(x2,fs);%回声信号
pause(5)
sound(y,fs);%叠加信号
b=1;
a(1)=1;
a(14135)=0.6;%通过前面步骤,测出了延时14134个采样点z1=filter(b,a,y);
z2=fft(z1,1024);%快速傅里叶变换
figure(5)
subplot(4,1,1);
plot(abs(z2));title('滤波幅值');
subplot(4,1,2);
plot(angle(z2));title('滤波相位');
subplot(4,1,3);
plot(z1(1:4400));title('滤波信号');
subplot(4,1,4);
plot(x(1:4400));
title('原始信号');
现代雷达信号检测及处理
现代雷达信号检测报告
现代雷达信号匹配滤波器报告 一 报告的目的 1.学习匹配滤波器原理并加深理解 2.初步掌握匹配滤波器的实现方法 3.不同信噪比情况下实现匹配滤波器检测 二 报告的原理 匹配滤波器是白噪声下对已知信号的最优线性处理器,下面从实信号的角度 来说明匹配滤波器的形式。一个观测信号)(t r 是信号与干扰之和,或是单纯的干扰)(t n ,即 ? ??+=)()()()(0t n t n t u a t r (1) 匹配滤波器是白噪声下对已知信号的最优线性处理器,对线性处理采用最大信噪比准则。以)(t h 代表线性系统的脉冲响应,当输入为(1)所示时,根据线性系统理论,滤波器的输出为 ?∞ +=-=0)()()()()(t t x d h t r t y ?τττ (2) 其中 ?∞ -=0 0)()()(τττd h t u a t x , ?∞ -=0 )()()(τττ?d h t n t (3) 在任意时刻,输出噪声成分的平均功率正比于 [ ] ??∞∞=?? ? ???-=0 20202 |)(|2)()(|)(|τττττ?d h N d h t n E t E (4) 另一方面,假定滤波器输出的信号成分在0t t =时刻形成了一个峰值,输出信 号成分的峰值功率正比于 2 02 2 0)()()(? ∞ -=τττd h t u a t x (5) 滤波器的输出信噪比用ρ表示,则
[ ] ?? ∞ ∞ -= = 2 02 02 2 20|)(|2)()(| )(|) (τ ττ ττ?ρd h N d h t u a t E t x (6) 寻求)(τh 使得ρ达到最大,可以用Schwartz 不等式的方法来求解.根据Schwartz 不等式,有 ??? ∞ ∞ ∞ -≤-0 20 2 02 0|)(||)(|)()(τττττ ττd h d t u d h t u (7) 且等号只在 )()()(0*τττ-==t cu h h m (8) 时成立。由式(1)可知匹配滤波器的脉冲响应由待匹配的信号唯一确定,并且是该信号的共轭镜像。在0=t t 时刻,输出信噪比SNR 达到最大。 在频域方面,设信号的频谱为 ,根据傅里叶变换性质可知,匹配滤 波器的频率特性为 (9) 由式(9)可知除去复常数 c 和线性相位因子 之外,匹配滤波器的频率 特性恰好是输入信号频谱的复共轭。式 (2)可以写出如下形式: (10) (11) 匹配滤波器的幅频特性与输入信号的幅频特性一致,相频特性与信号的相位谱互补。匹配滤波器的作用之一是:对输入信号中较强的频率成分给予较大的加权,对较弱的频率成分给予较小的加权,这显然是从具有均匀功率谱的白噪声中过滤出信号的一种最有效的加权方式;式(11)说明不管输入信号有怎样复杂的非线性相位谱,经过匹配滤波器之后,这种非线性相位都被补偿掉了,输出信号仅保留保留线性相位谱。这意味着输出信号的各个频率分量在时刻达到同相位,同相相加形成输出信号的峰值,其他时刻做不到同相相加,输出低于峰值。 匹配滤波器的传输特性 ,当然还可用它的冲激响应 来表示,这时有:
回声产生的原因
一、回声产生的原因 在通信网络中,产生回声的原因有两类:电学回声和声学回声。 1、电学回声:在目前几乎所有的通信网络中,信号的传递都是采用4 线传输,也就是在接收和发送两个方向上,各使用两条线传输信号,其中一条是参考地,另一条是信号线。 普通PSTN: 电话用户使用的话机都是通过2 线传输的方式接入本地交换机,一条线是参考地,另一条信号线上同时传输收发双向的信号。 在本地交换机中采用2/4 线转换(hybrid)实现这两种传输方式之间的转换。 由于实际使用的2/4 线变换器中混合线圈不可能做到理想状况,总是存在一定的阻抗不匹配,不能做到将发送端和接收端完全隔离,所以从4 线一侧接收的信号总有一部分没有完全转换到2 线一侧,部分泄露到了4 线一侧的发送端,因此产生回波(红色示意),如下图所示。 这种类型的回波称为电学回波,是回波的主要来源,一般的回波抵消器主要用来消除电学回波。 2、声学回声:由于话机问题导致话机在进行放音的过程中,部分音量从收话线路中被接受,产生回声(红色示意),如下图所示。 声学回波典型现象是在空旷的山谷中高声喊叫“哟——嗬——嗬——”,就能听到远处山谷的回声,还有北京天坛的回音壁与三音石也是同样道理。在通信网中,声学回波是因为在某些电话设备中,扬声器和传声器没有良好地隔离,发出的声音经空间多次反射回传到传声器而产生的,比如在空旷的房间或者汽车里使用免提电话就有这种情况。 从上述产生回音的原因可以看出,本端听到的回声是由对端造成的。 电学回声是1、本端说话的声音转换成电信号 2、传送到对端后从对端的二四线转换器 3、从对端的二四线转换器泄漏回来的; 声学回声是1、信号一直到达对端话机 2、转换成声音信号后从对方话机的麦克泄漏回来的。 二、感知回声的条件 通信网中的回声主要是由于电学回声导致的, 由回声产生的原理可以知道回声在电话网中总是存在的,但需要满足以下条件电话用户才能感受到回声:1、回波通路延时足够长 从发话者发出声音,到回波返回发话者,所经过的时间叫做回波通路延时。 如果回波通路延时很小,回波和用户发出的声音重叠在了一起,人是感觉不到回声的。对于大多数电话用户来说,如果回波通路延时时间:
电子科技大学雷达原理与系统期末考题
大四上学期雷达原理与系统期末考题(大部分) 一.填空选择: 1下列不能提高信噪比的是(B) A,匹配滤波器B,恒虚警C,脉冲压缩D,相关处理 2,若一线性相控阵有16个阵元,阵元间距为波长的一半,其波束宽度为(100/16) 3,模糊图下的体积取决于信号的(能量) 4,对于脉冲多普勒雷达,为了抑制固定目标,回拨方向加入对消器,这措施对运动目标的检测带来的影响是出现了(盲速) 5,雷达进行目标检测时,门限电平越低,则发现概率(越大),虚警概率(越大),要在虚警概率保持不变的情况下提高发现概率,则应(提高信噪比) 6,对于脉冲雷达来说,探测距离盲区由(脉冲宽度)参数决定。雷达接受机灵敏度是指(接收机接收微弱信号的能力,用接收机输入端的最小可探测信号功率Smin表示) 7,不属于单级站脉冲雷达系统所必要的组成部分是(B) A收发转换开关B分立两个雷达 8,若要求雷达发射机结构简单,实现成本低,则应当采用的结构形式是(单级振荡式发射机) 9,多普勒效应由雷达和目标间的相对运动产生,当发射信号波长为3m,运动目标与雷达的径向速度为240m/s,如果目标是飞向雷达,目标回波信号的频率是(100MHz+160Hz) 注:多普勒频率2drfv 10,在雷达工作波长一定情况下,要提高角分辨力,必须(增大天线间距d),合成孔径雷达的(方向分辨力)只与真实孔径的尺寸有关 11,只有同时产生两个相同且部分重叠的波束才能采用等信号法完成目标方向的测量 12,当脉冲重复频率fr和回波多普勒频率fd 关系满足(fr)》fd)时,不会出现(频闪和盲速) 13,只有发射机和接受机都是(相参系统),才能提取出目标多普勒信息14,大气折射现象会增加雷达(直视距离) 15,奈曼尔逊准则是在检测概率一定的条件下,使漏警概率最小,或者发现概率最大。16,相控阵雷达随着扫描角增加,其波束宽度(变大) 17,雷达波形模糊函数是关于(原点)对称的。
雷达介绍资料汇总
概述 介绍 Rockwell Collions WXR-2100型多扫描气象雷达在气象信息的处理和提炼方法上有革命性的突破,多扫描气象雷达是一种全自动雷达,它可以在不需要飞行员输入扫描角度和进行增益设置的情况下,不管在什么时候,不管飞机的姿态如何,对所有范围内重要的气象信息进行无杂波的显示。当多扫描气象雷达工作在自动模式的时候,每个飞行员将会获得一般只有有经验的雷达操作员才能获得的气象信息,而飞行员只需进行简单的规范化航空公司飞行员培训。多扫描气象雷达有效的减少了飞行员的工作负担,并增强了天气的探测能力,增加了机组及旅客的安全性。 多扫描雷达工作的关键在于雷达对雷雨底部反射部分的探测,然后通过先进的数字信号处理技术对地面杂波进行抑制。为了对短、中、长距离范围内的气象进行更好的探测,多扫描气象雷达也集成了多雷达扫描功能,对扫描角度进行预设。因此,在不同的飞行阶段,不同的探测距离,它的气象探测结果都十分出色。真320海里探测和Qverflight Protection功能是多扫描气象雷达众多新特征中的两个。多扫描气象雷达因为使用先进的运算法则来消除地面杂波,这使它能够跨越雷达视野的限制,为飞行员提供真正意义上的320海里气象资料。Overflight Protection功能使机组人员能够躲开雷雨顶部渗透,这是如今导致飞机颠簸的主要原因之一。Overflight Protection功能将那些对飞机造成威胁的任何雷雨信息保持在雷达显示屏上,直到它不在对飞机造成威胁为止。 系统描述 重要的运行特点 全自动工作:多扫描气象雷达设计工作在全自动模式,飞行员只需输入探测范围,而不需要输入扫描角度和进行增益设置。 理想的无杂波显示:Rockwell Collions第三代地面杂波抑制算法能减少约98%的地面杂波,这使它能理想的无杂波显示有威胁的气象信息。 在不同探测范围和飞行高度情况下良好的气象探测能力:多扫描气象雷达将从不同扫描角度获得的气象数据储存在存储器中,当飞行员选择了所要求的显示范围,不同角度的扫描信息将会从存储器中取出并一起显示。通过多角度的扫描,可以获得近距离和远距离的气象信息,这使得不管飞机的姿态如何,不管何种探测范围,显示屏上所呈现的都是一幅最优化的气象图。 决策气象:多扫描气象雷达能够提供真正意义上的320海里决策气象信息。 Gain Plus:Gain Plus包括以下功能: 传统的加减增益控制:多扫描气象雷达允许机组人员在人工或自动工作模式的时候进行增加或减小增益。 基于温度的增益控制:在高海拔的巡航高度,由于低的雷雨雷达反射率,将会基于温度对雷雨增益进行补偿。 路径衰减补偿和警报(PAC Alert):对距飞机80海里范围内的干扰性气象造成的衰减进行补偿,当补偿超过限制,一个黄色的PAC Alert杆将显示以提醒飞行员注意雷达阴影区。Overflight Protection:Overflight Protection功能减少了在高海拔巡航高度时疏漏雷雨顶部渗漏的可能性。多扫描气象雷达向下扫描波束的信息和它的信息存储能力将发挥作用,可以防止在飞机完全穿越有威胁的雷雨区之前,雷雨区图象在显示屏上消失。 海洋气候反射率补偿:多扫描气象雷达能对海洋雷雨反射率的减小进行增益补偿,以便在
解密回声消除技术汇总
因为工作的关系,笔者从2004年开始接触回声消除(Echo Cancellation)技术,而后一直在某大型通讯企业从事与回声消除技术相关的工作,对回声消除这个看似神秘、高端和难以理解的技术领域可谓知之甚详。 要了解回声消除技术的来龙去脉,不得不提及作为现代通讯技术的理论基础——数字信号处理理论。首先,数字信号处理理论里面有一门重要的分支,叫做自适应信号处理。而在经典的教材里面,回声消除问题从来都是作为一个经典的自适应信号处理案例来讨论的。既然回声消除在教科书上都作为一种经典的具体的应用,也就是说在理论角度是没有什么神秘和新鲜的,那么回声消除的难度在哪里?为什么提供回声消除技术(不管是芯片还是算法)的公司都是来自国外?回声消除技术的神秘性在哪里? 二、回声消除原理 从通讯回音产生的原因看,可以分为声学回音(Acoustic Echo)和线路回音(Line Echo),相应的回声消除技术就叫声学回声消除(Acoustic Echo Cancellation,AEC)和线路回声消除(Line Echo Cancellation, LEC)。声学回音是由于在免提或者会议应用中,扬声器的声音多次反馈到麦克风引起的(比较好理解);线路回音是由于物理电子线路的二四线匹配耦合引起的(比较难理解)。 回音的产生主要有两种原因: 1.由于空间声学反射产生的声学回音(见下图): 图中的男子说话,语音信号(speech1)传到女士所在的房间,由于空间的反射,形成回音speech1(Echo)重新从麦克风输入,同时叠加了女士的语音信号(speech2)。此时男
子将会听到女士的声音叠加了自己的声音,影响了正常的通话质量。此时在女士所在房间应用回音抵消模块,可以抵消掉男子的回音,让男子只听到女士的声音。 2.由于2-4线转换引入的线路回音(见下图): 在ADSL Modem和交换机上都存在2-4线转换的电路,由于电路存在不匹配的问题,会有一部分的信号被反馈回来,形成了回音。如果在交换机侧不加回音抵消功能,打电话的人就会自己听到自己的声音。 不管产生的原因如何,对语音通讯终端或者语音中继交换机需要做的事情都一样:在发送时,把不需要的回音从语音流中间去掉。 试想一下,对一个至少混合了两个声音的语音流,要把它们分开,然后去掉其中一个,难度何其之大。就像一瓶蓝墨水和一瓶红墨水倒在一起,然后需要把红墨水提取出来,这恐怕不可能了。所以回声消除被认为是神秘和难以理解的技术也就不奇怪了。诚然,如果仅仅单独拿来一段混合了回音的语音信号,要去掉回音也是不可能的(就算是最先进的盲信号分离技术也做不到)。但是,实际上,除了这个混合信号,我们是可以得到产生回音的原始信号的,虽然不同于回音信号。 我们看下面的AEC声学回声消除框图(本图片转载)。
回声信号的产生与消除
回声信号的产生与消除
信号与系统 姓名:苏小平 班级:电网13-1 学号:1305080116 学院:电气与控制工程学院
回声信号的产生与消除 第一部分:阐述回声产生与消除的步骤、原理。 1.步骤: (1)利用软件GOLDWAVE录取一段音频来自陈学冬的“不再见”。(2)将音频导入MATLAB中,通过编写程序,在音频里加入回声,得到了‘加回声的音乐’。 (3)通过编写程序,将加入回声的音频通过滤波器,将回声滤除,得到了‘去掉回声的音乐’。 2.原理: 无线通信中,当接收机从正常途径收到发射信号时,可能还有其它的传输路径,例如从发射机经过某些建筑物反射到达接收端,产生所谓“回波”现象,又如,当需要完成室内录音时,除了直接进入麦克风的正常信号之外,经墙壁反射的信号也可能被采集录入,这也是一种“回声”现象,为了解决这种多径传输中的失真问题,需要消除
或削弱回声。 消除回声的系统框图如下图所示: x(n)w(n)y(n) h1(n)h2(n) 系统一系统二 第二部分:利用MATLAB对音频进行处理: 1.将音乐导入MATLAB后画出加回声之前的时域波形图、幅值和相位图,见一下图形:
2.将音乐导入MATLAB 后画出加回声之前的时域波形图、幅值和相位图,见一下图形: 01234567 8 x 10 5 -0.05 -0.04-0.03-0.02-0.0100.010.020.030.04原信号波形 01234567 8 x 10 5 100200300原信号幅值 1 2 3 4 5 6 7 8 x 10 5 -4-2024原信号相位
激光雷达回波信号仿真模拟
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
雷达信号处理和数据处理
脉冲压缩雷达的仿真脉冲压缩雷达与匹配滤波的MATLAB仿真 姓名:-------- 学号:---------- 2014-10-28 - 0 - 西安电子科技大学
一、雷达工作原理 雷达,是英文Radar的音译,源于radio detection and ranging的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。利用电磁波探测目标的电子设备。发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。 雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。 但是因为普通脉冲在雷达作用距离与距离分辨率上存在自我矛盾,为了解决这个矛盾,我们采用脉冲压缩技术,即使用线性调频信号。 二、线性调频(LFM)信号 脉冲压缩雷达能同时提高雷达的作用距离和距离分辨率。这种体制采用宽脉冲发射以提高发射的平均功率,保证足够大的作用距离;而接受时采用相应的脉冲压缩算法获得窄脉冲,以提高距离分辨率,较好的解决雷达作用距离与距离分辨率之间的矛盾。 脉冲压缩雷达最常见的调制信号是线性调频(Linear Frequency Modulation)信号,接收时采用匹配滤波器(Matched Filter)压缩脉冲。 LFM信号的数学表达式: - 1 -
- 2 - (2.1) 其中c f 为载波频率,()t rect T 为矩形信号: ( 2.2) 其中B K T =是调频斜率,信号的瞬时频率为()22c T T f Kt t + -≤≤,如图 (图2.1.典型的LFM 信号(a )up-LFM(K>0)(b )down-LFM(K<0)) 将式1改写为: (2.3) 其中
回声抵消器的MATLAB设计与实现
回声抵消器的MATLAB设计与实现 前言 随着信息时代的到来,人们日渐依赖的通信方式正从早期的单一语言通信向多种业务、多种网络综合通信的方向发展,这也正是目前讨论比较多的多媒体通信的发展方向。在各种各样的通信业务中,凡是需要同时使用扬声器和麦克风的场合,例如会议电视、免提电话等系统终端,都不可避免地会因本地扩声系统和麦克风之间电声祸合,产生回声问题。为了增加系统稳定性,提到通信的质量,必须设置回声抵消器来排除回声的影响。 1回声抵消的原理 回声抵消器(ACE)的基本原理是用一个自适应滤波器去辨识扬声器与麦克风之间的声回波路径,通过自适应滤波算法的调整,使其自适应权值与声回波房间的冲激响应逼近,从而得到声回波估计信号,再将估计信号从麦克风接收到的语言信号中减去,即可实现声回波抵消(如图1所示)。 其中,声回波抵消器产生的回波抵消预测信号为r(n),实际声回波信号为r(n),预测误差信号为e(n)。则用公式表达声回波抵消的过程为:
e(n)=r(n)-r(n) (1) (2) 由图1可知,声回波抵消的核心是一个自适应滤波器。自适应滤波器使用中要考虑的重要问题是优化调整滤波器参数的准则,该准则不仅要对滤波器性能提供有意义的度量,而且必须导出可实现的算法。对自适应算法的要求是收敛速度快,计算复杂度低,稳定性好,失调误差小。 2回声抵消器的算法 回声抵消器的算法都采用自适应算法,目前最受欢迎的自适应算法是LMS 算法,LMS 算法简单有效,易于实现,最小均方误差算法(LMS )是一种用瞬时值估计梯度矢量的方法,即 2[()]()2()()()n e n e n n n ??==-?X h (3) 按照自适应滤波器滤波系数矢量的变化与梯度矢量估计的方向之间的关系,可以写出LMS 算法调整滤波器系数的公式如下所示: 1(1)()[()]2n n n μ+=+-?h h ()()()n e n n μ=+h X (4) 上式中的μ为步长因子。μ值越大,算法收敛越快,但稳态误差也越大;μ值越小,算法收敛越慢,但稳态误差也越小。为保证算法稳态收敛,应使μ在以下范围取值: (5) 其中是X (n )的相关矩阵的最大特征值。 3基于DSP 的回声抵消器的设计 3.1硬件设计 本设计方案采用TLC320AD50C 音频CODEC 芯片及其外围电路来进行音频A/D 和D/A 转换;采用性价比比较高的定点DSP 芯片TMS320VC5402完成回声抵消算法及相关控制功能;外部EPROM 采用29EE010芯片构成1M 的存储空间。
雷达--地物回波系统分
衰落速率的计算 计算多普勒频率是求衰减落速率(Fading rate )最容易的方法。为了在一个特定的多普勒频移范围内计算回波信号的幅度,必须将所有具有这些频移的信号相加。这就需要了解散射面上的多普勒频移等值线(等值多普勒频移)。对于每一种特殊形状的几何体都必须建立起这种多普勒频移等值线。下面用一个沿地球表面水平运动的简单例子来说明。它是普通巡航飞行飞机的一个典型实例。 假定飞机沿y 方向飞行,z 代表垂直方向,高度(固定)z = h 。于是有 v =1v v h y x z y x 111R -+= 式中,1x ,1y ,1z 为单位矢量。因而 h y x vy R v r 222++==?R v 式中,v r 是相对速度。等相对速度曲线也就是等多普勒频移曲线。该曲线的方程为 0222222=+--h v v v y x r r 这是双曲线方程。零相对速度的极限曲线是一条垂直于速度矢量的直线。图12.7示出这样一组等多普勒频移曲线。 只要把雷达式(12.1)略加整理就可用来计算衰落回波的频谱。这样,如果W r (f d )是频率f d 和f d +d f d 之间接收到的功率,则雷达方程变为 ? π=积分区R A A G P f f W r t t d d r 402d )4(1d )(σ ????? ??-π=d r t t d f A R A G P f d d )4(d 402σ (12.12) 图12.7 在地球平面做水平运动时的多普勒频移等值线图12.8 计算复数衰落的几何关系图 (引自Ulaby,Moore 和Fung [21]) 上式的积分区是频率f d 和f d +d f d 间被雷达照射到的区域。在此积分式中,f d 和f d +d f d 之间的面
利用雷达回波资料作临近预报应注意的几个问题
文章编号:167328411(2008)增刊 20062202 利用雷达回波资料作临近预报应注意的几个问题 钟常鸣 (广西北海市气象局,北海 536000) 摘 要:利用雷达回波资料作临近预报应该注意以下几个问题:新一代雷达存在静锥区,静锥区内没有雷达探测数据,要通过调用邻近雷达站的低仰角资料来弥补;正确理解平面位置显示(PP I)是准确地进行回波分析的基础;地球曲率会影响天气雷达的探测,雷达波束在前进方向上随着距离增加距地面高度逐渐增加;地物杂波对雷达低仰角的产品会造成影响;使用线性外推作临近预报只有在一定的短时间内才可获得最好的效果。 关键词:雷达回波;临近预报;问题 1 利用雷达回波资料作临近预报要注意的问题 111 分析雷达资料前注意的问题 分析雷达资料前要查看图象文字区的各种参数,如站名、图象产品名称、时间、显示色标与单位、仰角或方位角、脉冲重复频率、显示距离等,还要检查回波强度(或速度)和范围分布的可靠性,如回波强度值、有否虚假回波、最大不模糊速度与脉冲重复频率是否一致、同时次的径向速度(V)图象与回波强度(Z)图象的范围等。 112 雷达静锥区问题 我国的新一代天气雷达(C I N RAD2SA)以体扫模式进行工作,雷达操作员不能手动调节天线仰角,天线仰角只能通过改变雷达的扫描方式、体扫模式及工作模式而设定。新一代天气雷达C I N RAD2SA 的最高扫描仰角为1915°,仰角超过1915°的任何位置上都没有雷达探测数据,1915°仰角以上的区域称为静锥区。要解决雷达静锥区资料空白的问题,必须通过调用邻近雷达站的低仰角资料来弥补。 113 正确理解平面位置显示(PP I) 所谓平面位置显示产品PP I,是指当雷达以固定仰角,天线以全方位扫描的探测方式而获取的数据,通过以雷达为中心的极坐标形式,采用不同的彩色色标来表示数据的大小和方向而产生的图象产品。平面位置显示PP I包括回波强度、径向风场、速度谱宽三种,此类产品一般还可配上当地的地形、河流、行政区划等地理信息,方便用户使用。PP I产品图象中标明时间、仰角、色标等,径向速度PP I图象产品中还应表明雷达测站所在的位置。 正确理解平面位置显示(PP I)是准确地进行回波分析的基础,严格来说PP I显示的面并不是平面而是一个圆锥面,在每个仰角上,以雷达为中心,沿着雷达波束向外,距地面的高度随径向距离的增加而增加。 114 地球曲率对天气雷达探测的影响 由于大气中的温、压、湿随高度而变化,同时地球本身是一个近似的球体,就是当雷达天线处于0°仰角发射电磁波时,电磁波在前进过程中距地面的高度也在改变。在标准大气折射的情况下,由于地球曲率的原因,雷达波束在前进方向上随着径向距离增加逐渐远离地球,云雨只有进入雷达波束内才能被雷达观测到1距雷达较近的地方雷达波束高度较低,近处的云雨高度由于容易达到雷达波束的高度因而被雷达观测到,而距雷达较远的地方雷达波束高度较高,远处的云雨如达不到雷达波束高度进入不了雷达波束内就不能被雷达观测到。 也就是说,平面位置显示产品PP I上远处的地方即使没有回波显示,也不能判断那里实际上有没有云雨存在,有可能该处的云雨高度够不着雷达波束没有被雷达观测到。要判断远处是否存在云雨应调用邻近雷达站的低仰角资料来进行分析。 115 地物杂波的影响 地物杂波包括普通地物杂波和异常地物杂波。 普通地物杂波是指由高大建筑、山脉、丘陵、海岸线、岛屿等地形地物在雷达波束正常传播情况下造成的杂波,一般发生在距雷达较近的地方;而由特殊气象条件下雷达波束的超折射造成的地物回波 第29卷 增刊 气 象 研 究 与 应 用 V o l129 增刊 2008年10月JOU RNAL O F M ET EOROLO G I CAL R ESEA RCH AND A PPL I CA T I ON O ct12008
回声信号的产生与消除
M=4001; fs=8000; [B,A]=cheby2(4,20,[0.1 0.7]); Hd=dfilt.df2t([zeros(1,6) B],A); hFVT=fvtool(Hd); set(hFVT,'Color',[1 1 1]) H=filter(Hd,log(0.99*rand(1,M)+0.01).*sign(randn(1,M)).*exp(-0.002*(1:M))); H=H/norm(H)*4; plot(0:1/fs:0.5,H); xlabel('Time[sec]'); ylabel('Amplitude'); title('Room Impulse Response'); set(gcf,'Color',[1 1 1]); load nearspeech n=1:length(v); t=n/fs; plot(t,v); axis([0 33.5 -1 1]); xlabel('Time[sec]'); ylabel('Amplitude'); title('Near-End Speech Signal'); set(gcf,'Color',[1 1 1 ]); p8=audioplayer(v,fs); playblocking(p8); load farspeech x=x(1:length(x)); dhat=filter(H,1,x); plot(t,dhat); axis([0 33.5 -1 1]); xlabel('Time[sec]'); ylabel('Amplitude'); title('Far-End Echoed Speech Signal'); set(gcf,'Color',[1 1 1]); p8=audioplayer(dhat,fs); playblocking(p8); d=dhat+v+0.001*randn(length(v),1); plot(t,d); axis([0 33.5 -1 1]); xlabel('Time[sec]'); ylabel('Amplitude');
基于CPCI总线的通用雷达回波信号模拟器
第5卷 第6期信息与电子工程Vo1.5,No.6 2007年12月INFORMATION AND ELECTRONIC ENGINEERING Dec.,2007 文章编号:1672-2892(2007)06-0418-06 基于CPCI总线的通用雷达回波信号模拟器 张 辉,刘 峥 (西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071) 摘要:为了在实验室环境下对雷达信号处理系统进行调试和工作效能测试,设计了一种基于紧凑型外部设备互联总线(CPCI)和现场可编程门阵列技术的通用雷达回波信号模拟器,利用 MATLAB的强大仿真功能,模拟产生各种体制雷达的回波信号数据,通过CPCI总线把它们写入该 信号模拟器的同步动态随机存储器中,雷达信号处理模块再从该模拟器中反复读出数据进行处理, 从而调试和检测雷达信号处理模块在各种杂波及无源干扰条件下对目标的处理。结果证明,该模 拟器具有良好的通用性和精确度,并且运行可靠。 关键词:紧凑型外部设备互联总线;雷达回波信号模拟器;现场可编程门阵列;同步动态随机存储器;WDM驱动程序 中图分类号:TN957.51 文献标识码:A A Universal Radar Echo Simulator Based on CPCI Bus ZHANG Hui,LIU Zheng (National Key Lab. of Radar Signal Processing,Xidian University,Xi’an Shaanxi 710071,China) Abstract:A universal radar echo simulator based on compact peripheral component interconnect (CPCI) bus and FPGA technology is introduced. The simulator is used to debug and test the performance of the system of radar signal processing in laboratory. In the design,the strong simulation function of MATLAB is performed to simulate all kinds of radar echo,and then these radar echo data are translated to the SDRAM in the signal simulator. From this time on, the radar signal processor fetches the signal data from the simulator time after time to process them,thus to debug and test the performance of target detection under all kinds of radar clutter and passive jamming for the radar signal processor. The results show that the simulator has good universality and accuracy,and can be operated reliably. Key words:CPCI;universal radar echo signal simulator;FPGA;SDRAM controller;WDM driver 1 引言 随着标准化和通用化产品设计理念的发展,近年来基于标准CPCI总线的通用雷达信号处理系统越来越受到人们的推崇,然而要对其作战效能进行调试和测试,就必须具备逼真的配试目标,需要有与各种实际战场环境接近的工作环境,并且外场试验的组织协调难度很大,需要消耗大量的财力和物力,因此需要在实验室环境下采用基于标准CPCI总线的雷达回波信号模拟器。为了增强模拟器的灵活性和普遍性,利用MATLAB的强大仿真功能,通过参数的改变,模拟各种可能出现的情况,例如设定不同的气象条件,改变目标的个数或参数,调整噪声功率等。结合FPGA技术,选用SDRAM作为MATLAB仿真的雷达回波信号存储体,设计并实现了一种基于CPCI总线的雷达回波信号模拟器。 2 模拟器的设计思想 为了满足不同雷达回波信号的模拟要求,该模拟器采用CPCI总线+FPGA+SDRAM结构,同时结合MATLAB 仿真技术,以CPCI总线的工控机为基础,将MATLAB模拟产生的回波数据经CPCI总线传输至SDRAM中。然 收稿日期:2007-06-06;修回日期:2007-07-06
楼宇对讲回音消除解决办法
楼宇对讲回音消除解决方法 近年,随着大数据时代的来临,很多楼宇对讲系统也相应的进入改造行列。传统的双线四线制对讲慢慢地进入衰老淘汰期,新兴的以太网传输网络一遍火热。但是在改造的过程中工程师们也将面临着一个新的挑战——回音消除! “回音”是通讯产品及配件在实际使用的过程中,时常遇到的问题。客观地说,无论模拟式通讯、还是数字式通讯,在使用过程中,都一定存在回音的现象。因此,回音消除器产品成为了通讯业至今不息的论题。 在设计一款“回音消除”产品、或者模块化电路的时候,设计人员首先要了解“回音”产生的机理,而后从实际的条件入手,选择适合的产品方案。以下所讨论的,仅限于视频会议行业常规的使用条件下的产品。 回音的产生,最早是人们在一个空旷的峡谷中喊话,会多次听到自己的声音,这种现象是“声学回音”,指声源产生后,声波在某个物体的表面得到发射,形成“二次声源”,如果声波得到多次的反射,就会形成在峡谷中喊话的效果了。中国北京天坛回音壁就是人为地采用了这种回音原理,建造出的历史景点。 在电话出现后,人们又发现,在通话过程中,会在一定的短暂延时之后,听到自己说的话。这种回音现象,我们称之为“网络回音”,特别是采用两线式的电话系统,在两条铜线上要承载双向的语音信号,在电波延时后,就会出现“二次信号”了。 通讯中的回音,如果造成“多谐波”,就会发生“自激啸叫”,影响通讯效果。但是在电话通讯中,一定水平的“网络回音”(侧音)是有利于通话双方的沟通感觉。 目前楼宇对讲中所讨论的回音,同时包含了电路的信号延时产生的侧音和会场环境造成的声学回音两种因素,以下主要是由于声学回音Acoustic Echo造成,在下图中,解释了产生的原因: 在通讯中,室内机用户和本端用户形成了通讯的环路(Loop),一个双向的通信线路组成了一个封闭的环路。 图中所示:室内机用户的语音信号经过话筒的采集后,以数据信号的方式通过通信线路传递到室外机设备,通过扬声器播放出来;播放出来的声音和室外机用户讲话的声音同时进入话筒,
《信号与系统》课程设计——回波的产生与消除
《信号与系统》课程设计——回波的产生与消除 【设计题目】回波的产生与消除 【设计要求】 (1) 产生信号x和带有回波的声音信号y。 (2) 从带有回波的信号y中消除回波。 (3) 从y中估计回波的延迟时间。 【设计工具】MATLAB 【设计原理】 1、声音信号x的产生: 声音信号x,既可以从现成的声音文件(.wav)中获取;也可以利用MATLAB 命令产生各种不同形式的信号。 2、带回波的声音信号y产生: 带回波的声音信号,可以表达为在原信号的基础上叠加其延时衰减的分量。假设只有一个回波的情况下,可简化其模型为: y(n)=x(n)+a x(n-N) (式1)a为反射系数;N为延迟时间。 思考1: 分别改变反射系数a和延迟时间N的大小,播放产生的回声信号y,分析反射系数a和延迟时间N对原始声音的影响。 思考2: 按照以上思路,当有两个、三个或更多回声时,就有更多的信号叠加,程序编制变得繁琐。有什么更好的办法产生回声? 3、回波消除 如何从信号y中恢复出信号x?即是(式1)的一个逆向求解过程。因此回波消除的关键可以通过(式1)的模型建立从信号y中恢复信号x的模型。只要恢复模型建立,即可将信号y作为输入信号,求得恢复后的信号x’。 4、从信号y中估计回波的延迟时间 从信号y中估计回波的延迟时间,即估计(式1)中的N。也就是,估计y(n)中的原始声音信号x(n)与其延时衰减分量a x(n-N)的相关联的程度。下面简单介绍一下信号相关的概念。 在统计通信及信号处理中,相关的概念是一个十分重要的概念。相关函数和信号的功率谱有密切关系。所谓相关是指两个确定信号或两个随机信号之间的相
《信号与系统》课程设计——回音的产生与消除
《信号与系统》课程设计——回音的产生与消除班级:光电一(6)班 姓名:骆骏 学号:2010051060023 全部源程序如下: [x,fs,bits]=wavread('xiyangyang'); figure(1); subplot(3,1,1); plot(x(1:65000)); title('原始信号'); y=fft(x); subplot(3,1,2); plot(abs(y)); title('幅值'); subplot(3,1,3); plot(angle(y)); title('相位'); sound(x,fs); pause(10) x1=x(1:65000); x2=x(1:65000); x1=[x1,zeros(1,10000)]; x2=[zeros(1,10000),0.7*x2]; y=x1+x2; figure(2); subplot(3,1,1); plot(y(1:65000)); title('回声'); y1=fft(y); subplot(3,1,2); plot(abs(y1)); title('幅值'); subplot(3,1,3); plot(angle(y1)); title('相位');
sound(y,fs); pause(10) b=1; a=zeros(1,10000); a(1)=1; a=[a,0.7]; z1=filter(b,a,y); z2=fft(z1); figure(3); subplot(3,1,1); plot(abs(z2)); title('滤波幅值'); subplot(3,1,2); plot(angle(z2)); title('滤波相位'); subplot(3,1,3); plot(z1(1:65000)); title('滤波信号'); sound(z1,fs); 程序简要分析: 首先利用声卡或软件(本人用的是格式工厂)录下一段采样率为22050Hz的wav格式的音频文件,并将其复制到Matlab的work工作区,取名“xiyangyang”。然后利用wavread函数读入并将其一维数组的值赋给变量x,经size(x)测得其长度为66230(x取前65000位)。 利用图形窗口subplot函数将figure(1)分成3个绘图区,以便于分别用plot函数将原始音频的原始信号,幅值和相位在figure(1)上输出。相关函数有title,用于标注图形名称; fft用来计算离散傅里叶变换,此函数将序列x的快速离散傅里叶变换的结果存到向量y中,即其幅值;angle函数用于返回向量y的弧度,即一维复合元素的向量矩阵。最后利用sound命令把原始音频文件输出。 然后分别把x赋x1和x2,并分别在x1的最后和x2的最前加10000个0,且设x2的回音衰减系数为0.7。使原始信号产生一个10000的时延和0.7的衰减率并将其进行叠加赋给y,而输出的y就实现了x1和x2的叠加,即产生回音的过程,再分别将y的回声,幅值和相位用相似的处理方法输出在figure(2)上。 最后是回音的消除过程,此过程利用了一个关键的一维数字滤波滤波器函数filter,即建立一个一维差分方程,最后反求出原始信号x,即程序中所指的z1。“z1=filter(b,a,y)”的意思是使b*z1=a*y,而a,b,y和z1均可以是向量(实过程为“a(1)*z1(n)+a(2)*z1(n-1)+ a(3)*z1(n-2)+…..=b(1)*y(n)+b(2)*y(n-1)+b(3)*y(n-2)+…..“),最后输出的是z(n)。执行此语句后,z1(n)+0.7*z1(n-10001)=y(n),而显然得到的z1(n)就是叠加信号y 减去原来的回音x2后所得的原始信号,即x。 注:
雷达回波信号产生
雷达回波信号产生 1.线性调频信号: 线性调频信号是指频率随时间而线性改变(增加或减少)的信号,是通过非线性相位调制或线性频率调制获得大时宽带宽积的典型例子。通常把线性调频信号称为Chirp信号,它是研究最早而且应用最广泛的一种脉冲压缩信号。 线性调频信号的主要优点是所用的匹配滤波器对回波的多普勒频移不敏感,即使回波信号有较大的多普勒频移,仍能用同一个匹配滤波器完成脉冲压缩; 主要缺点是存在距离和多普勒频移的耦合。此外,线性调频信号的匹配滤波器的输出旁瓣电平较高。 单个线性调频脉冲信号的时域表达式为: 其中A为脉冲幅度,f0为中心频率,μ为调频斜率。 Matlab实现: 参数设置 :
信号产生:u=cos(2*pi*(f0*t+K*t.^2/2)); 仿真结果: 2.多普勒频移 “多普勒效应”是由奥地利物理学家Chrjstian?Doppler 首先发现并加以研究而得名的,其内容为:由于波源和接收者之间存在着相互运动而造成接收者接收到的频率与波源发出的频率之间发生变化。 多普勒频移(Doppler Shift)是多普勒效应在无线电领域的一种体现。其定义为:由于发射机和接收机间的相对运动,接收机接收到的信号频率将与发射机发出的信号频率之间产生一个差值,该差值就是Doppler Shift。 设发射机发出的信号频率为(f 发),接收机接收到的信号频率为(f 收),发射机与接收机之间的相对运动速度为V,C 为电磁波在自由空间的传播速度:3×10(8次方)米/秒则有如下公式:f 收=(c±v)/λ=f 发±v/λ=f 发±f 移;(f 移)即为多普勒频移,(f 移)的大小取决于信号波长λ及相对运动速度V。对某发射机,