测控技术设计与实现预习实验报告
实验报告
班级:电技171 姓名:学号:组别: 10
课程名称:单片机原理及系统设计实验室:学院楼综合实验室实验时间: 2019.03.11-2019.03.22
实验项目名称:测控技术设计与实现
一、实验目的:
1.对所需的电子线路基单片机原理等方面知识综合训练,巩固所
学知识,提高应用能力。
2.培养独立分析问题和解决问题的能力,提高所学知识解决实际
问题的能力。
3.提高设计及动手操作能力,对今后的学习及将来工作起到促进
作用。
二、实验内容及原理:
1.实现基于单片机的步进电机测控系统:
利用基于单片机的温度测控系统,实现对环境温度的测量、显示,并且通过对环境温度的变化实现对步进电技转速、方向的控制。使用MATLAB对不同温度对应的方向和转速进行拟合,得到步进电机转速与温度的函数,写入程序。当温度低于室温时,电机逆时针转动;当温度高于室温时,电机顺时针转动。高于室温
时,温度升温电机加速旋转,降温电机减速旋转;低于室温时,降温电机加速旋转,升温电机减速旋转。
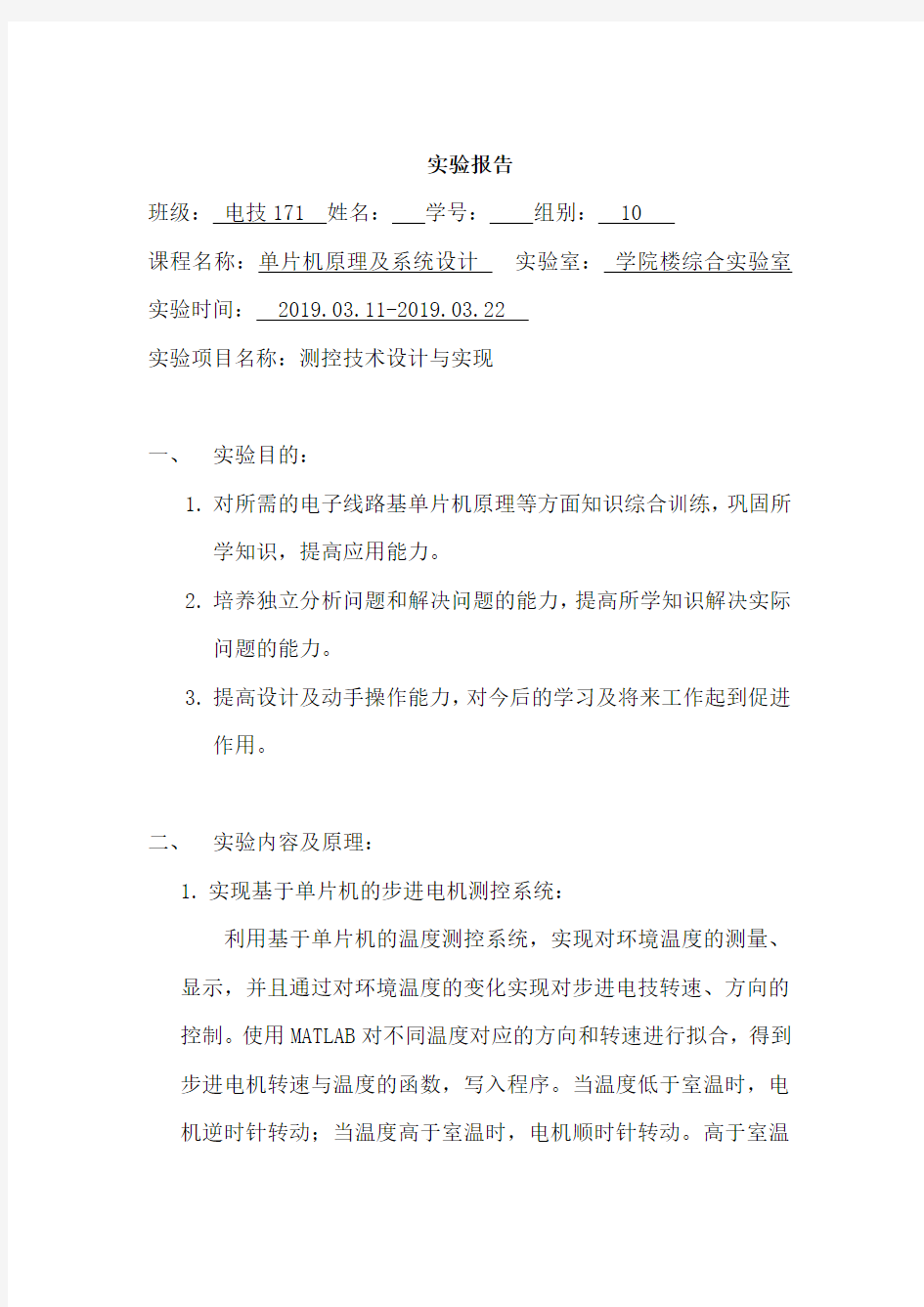
2.电机工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。开始时,给B极输入高电平,A、C、D输入低电平,B 相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D 相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当给C输入高电平,B、A、D输入低电平时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C 相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
3.实验电路
三、实验器材
设备和元器件:单片机、温度传感器、步进电机
软件工具和平台:keil、proteus、matlab、c语言
四、实验步骤
1.单片机初始化、读时序、写程序、DS18B20温度检测模块:
2.Matlab建模
3.烧录测试单片机
4.调节设定的室温及处理出现的问题
五、实验数据及结果分析:
实验程序:
#include
DS=0;i++; //i++ for delay DS=1;i++;i++; dat=DS; i=8;while(i>0)i--; return (dat); } uchar tmpread(void) //read a byte date { uchar i,j,dat; dat=0; for(i=1;i<=8;i++) { j=tmpreadbit(); dat=(j<<7)|(dat>>1); } return(dat); } void tmpwritebyte(uchar dat) //write a byte to ds18b20 { uint i; uchar j; bit testb; for(j=1;j<=8;j++) { testb=dat&0x01; dat=dat>>1; if(testb) //write 1 { DS=0; i++;i++; DS=1; i=8;while(i>0)i--; } else { DS=0; //write 0 i=8;while(i>0)i--; DS=1;
i++;i++;
}
}
}
void tmpchange(void) //DS18B20 begin change
{
dsreset();
delay(1);
tmpwritebyte(0xcc); // address all drivers on bus
tmpwritebyte(0x44); // initiates a single temperature conversion
}
uint tmp() //get the temperature
{
float Temperature;
uchar a,b;
EA=0;
dsreset();
delay(1);
tmpwritebyte(0xcc);
tmpwritebyte(0xbe);
a=tmpread();
b=tmpread();
temp=b;
temp<<=8; //two byte compose a int variable
temp=temp|a;
if(temp<0)
{
temp=temp-1;
temp=~temp;
Temperature=temp;
temp=Temperature*0.0625*100+ 0.5;
DiplayData[0]=16;
} else
{
Temperature=temp*0.0625;
temp=Temperature*100+0.5;
Temperature*10+0.5
DiplayData[0]=0;
}
EA=1;
return temp;
}
u_8 code ShuMaGuan[]={0Xc0,0xf9,0xa4,0xb 0,0x99,0x92,0x82,0xf8,0x80,0x90 ,0x88,0x83,0xc6,0xa1,0x86,0x8e} ;//12ò?
u_8 code ShuMaGuanA[]={0x09,0x01,0x03,0x 02,0x06,0x04,0x0c,0x08};
u_8 code ShuMaGuanB[]={0x08,0x0c,0x04,0x 06,0x02,0x03,0x01,0x09};
u_8 DiplayData[8];
u_8
Time,SaoMiaoFlag=0,HighTemp,Low Temp,SampleFlag,ZhengFanZhuan,i 0=0,c0=0;
U_int16 Tem,ZhuanCounter=0;
int ZhuanSpeed = 1;
void Timer0Cofig(void)
{
TMOD = 0x01;
TH0 = 0xfc;
TL0 = 0x18;
EA = 1;
ET0 = 1;
TR0 = 1;
}
void main()
{
P1=ShuMaGuanA[0];
Timer0Cofig();
while(1)
{
if(SampleFlag==1&&Time>10)
{
tmpchange();
Tem=tmp();
//Temperature-=100;
Tem=Tem/100;
if(Tem>27)
Beep=1;
else
Beep=0;
if(Tem>=27)
{
ZhengFanZhuan=1;
//ZhuanSpeed=1;
ZhuanSpeed
=(-2597)*Tem.^(-1.456)+49.98;//?y?ó?ù
}
else if(Tem>22)
{
ZhengFanZhuan=1;
ZhuanSpeed = 0.0777*exp(0.2007
*Tem)£?//?y???ù
}
else if(Tem>15)
{
ZhengFanZhuan=0;
//ZhuanSpeed = (-0.032428*(float)(Tem)*(float) (Tem)+1.142359*(float)(Tem)
-4.5); //30
ZhuanSpeed = -6.039e-05*.Tem^4.415+32.91;
}
else
{
ZhengFanZhuan=0;
//ZhuanSpeed=2;
//30
ZhuanSpeed =335.4*Tem.^(-0.3786)-108.7;//D
?óú15£?·′?ó?ù
}
if(ZhuanSpeed<1)
ZhuanSpeed=2;
HighTemp= Tem/100;
LowTemp= Tem%100;
DiplayData[1]=HighTemp/10;
DiplayData[2]=HighTemp%10;
DiplayData[3]=LowTemp/10;
SampleFlag=0;
}
}
}
void Timer0() interrupt 1
{
TH0 = 0xf6;
TL0 = 0x3c;
Time++;
if(Time>=200)
{
Time=0;
SampleFlag=1;
}
{
P0=0x00;
switch(SaoMiaoFlag)
{
case(0):
Fuhao=0;ShiWei=1;GeWei=1;XiaoSh
u=1; break;
case(1):
Fuhao=1;ShiWei=0;GeWei=1;XiaoSh
u=1;break;
case(2):
Fuhao=1;ShiWei=1;GeWei=0;Xia oShu=1; break;
case(3):
Fuhao=1;ShiWei=1;GeWei=1;Xia oShu=0; break;
}
if(SaoMiaoFlag==2)
P0=ShuMaGuan[DiplayData[SaoMiao Flag]]&0x7f;
else
P0=ShuMaGuan[DiplayData[SaoMiao Flag]];
SaoMiaoFlag++;
if(SaoMiaoFlag>3)
SaoMiaoFlag=0;
}
ZhuanCounter++;
if(ZhuanCounter>ZhuanSpeed)
{
if(ZhengFanZhuan==1)
P1=ShuMaGuanA[i0];
else
P1=ShuMaGuanB[i0];
i0++;
if(i0>8)
i0=0;
ZhuanCounter=0;
}
}
实验公式及拟合图像
x=[20 22 27 30 32 34];
>> y=[0 10 17 22 29 31];
y=(-2597)*x.^(-1.456)+49.98;
>> plot(x,y)
>> xlabel('x')
>> ylabel('y'),hold on
y=[0 1 3 7 20 31]
y= 0.0777*exp(0.2007 *x),plot(x,y)
>> x=[10 13 15 17 19 20];
>> y=[31 29 22 18 5 0];
>> y=-6.039e-05*x.^4.415+32.91;
>> plot(x,y)
>> hold on
>> plot(x,y,'o')
>> y=335.4*x.^(-0.3786)-108.7,plot(x,y) >> plot(x,y,'o')
电机模块延时函数
四相八拍运行方式下每接收一个脉冲,电机转动0.9°,当电机每秒钟接受400个脉冲,则400×0.9°=360°,即电机转速为60r/min。
对应温度下计算得转速为Y,脉冲频率为N=Vr/60*400;脉冲周期T=1/N;延时函数中p变量的值为T/2;
六、实验结论
温度的变化控制电机转速的快慢和方向。温度低于室温电机反转,温度高于室温电机正转,而温度升高或降低都将使电机的转动速度加快。
七、思考题(思考题、在实验过程中遇到的问题及解决方法)
拟合曲线过程中,对应的函数总是出现折线,并不是圆滑的曲线?
在MATLAB中输入数值,在拟合曲线中依次尝试各个函数及次方,最终找到了符合的光滑曲线。
八、实验总结
本次实验过程收获良多,原来学到的知识终于能联系在一起并且综合运用,在这个过程中遇到了很多难题,但大多都通过查询资料、询问老师同学解决了。
1.在实验过程中发现同一地点不同温度计显示的温度不一,希望能改进。
2.实验过程较长,温度变化大,导致设置好的室温在进一步调控
时又出现较大的偏差。
通信工程专业综合实验报告..
通信工程专业综合实验 实验报告 (移动通信系统和网络协议部分) 姓名: 学号: 班级: 指导教师:
实验一:主被叫实验 一、实验目的 1、掌握移动台主叫正常接续时的信令流程。 2、了解移动台主叫时被叫号码为空号时的信令流程。 3、了解移动台主叫时被叫用户关机或处于忙状态时的信令流程。 4、了解移动台主叫时被叫用户振铃后长时间不接听的信令流程。 5、掌握移动台被叫正常接续时的信令流程。 6、掌握通话结束呼叫释放时的信令流程。 7、了解被叫用户振铃后长时间不接听时移动台被叫的信令流程。 二、实验仪器 1、移动通信实验箱一台; 2、台式计算机一台; 3、小交换机一台: 三、实验原理 处于开机空闲状态的移动台要建立与另一用户的通信,在用户看来只要输入被叫号码,再按发送键,移动台就开始启动程序直到电话拨通。实际上,移动台和网络要经许多步骤才能将呼叫建立起来。以移动台和移动台进行通信为例,就包括主叫移动台和主叫MSC建立信令链接、主叫MSC通过被叫电话号码对被叫用户进行选路,即寻找被叫所处的MSC、被叫MSC寻呼被叫MS并建立信令连接过程等三个过程。本实验主要是让学生掌握移动通信中移动台主叫时MS和MSC之间的信令过程、以及为了完成通话连接,主叫MSC和被叫MSC之间的信令过程(即七号信令中的部分消息)。 四、实验内容 1、记录正常呼叫的过程中,移动台主叫部分和被叫部分的信令流程 2、记录被叫关机时,移动台主叫部分的信令流程 3、记录被叫振铃后无应答时,移动台主叫部分和被叫部分的信令流程 4、记录被叫号码无效时,移动台主叫的信令流程 5、记录通话结束后,呼叫链路释放的信令流程 五、实验步骤 主叫实验: 1、通过串行口将实验箱和电脑连接,给实验箱上电。将与实验箱相连的电脑上的学生平台程序打开。在主界面上双击“主叫实验”图标,进入此实验界面。 2、点击“初始化”键,看到消息框中出现“初始化”完成。再点击“开机”键,从而使移动台处于开机状态。
测控专业综合实验报告
湖南科技大学测控技术与仪器专业专业综合实验报告 姓名 学号 成绩 湖南科技大学机电工程学院 二0—三年 ^一月 ^一日目录 一、液压泵站综合控制实验 3 (一)实验目的 3 (二)实验内容 3 二、液压实验台PLC控制实验 4 (一)实验目的 4 (二)实验内容 4 —振动测试与故障诊断综合实验( 一) 一)实验目的 5 二)实验内容 5 四.振动测试与故障诊断综合实验(二)(一)实验目的 6 (二)实验内容 6 五.基于虚拟仪器的自动控制原理综合实验(一)实验目的7 (二)实验内容7 六.基于虚拟仪器的传感器综合实验8 (一)实验目的8 (二)实验内容8 七.地震仪器综合设计9 (一)实验目的9 (二)实验内容9 八.电法仪器综合设计10 (一)实验目的10 (二)实验内容10 九、实验心得11 一、液压泵站综合控制实验 (一)实验目的 了解液压控制的装置,熟悉PLC编程,并且了解 置的原理并且用于实践生活中去。(二)实验内容 此实验是液压的测量实验用PLC处理器控制来实现,液压PLC综合控制实验室是我公 司根据高校机电一体化对气、电、液控制的教学大纲要求,在我公司专利产品YY-18透明 液压传动演示系统的基础上,综合了我公司气动PLC与液压PLC控制实验设备的优点,采 用了开放型综合实验台结构,广泛征求专家教授与老师的意见,经不断创新改进研制而成的。是目前集气动控制技术、液压传动控制技术以及PLC可编程序控制器控制技术于一体 的理想的综合性实验设备。实验时,它们可以相互辅成,交叉控制。可以让学生直观、感性地对比、了解气、电、液各自具有的特点、特色、及优缺点等。 信号采集电路原理设计: (1)前置放大电路要求有阻抗匹配设计(前置放大器采用集成运放OP07、 采用电压负反馈设计、增益为10、50 两档手动设计) (2)主放大器采用级联组合程控放大、增益动态范围为10 至1500 倍之内。 (增益程档位要求有30 至40 梯度之内,具体每档增益值不做具体要求但要求梯度 增益呈线性) (3)主放大器末端输出值(Up-p)设计为5v,如有溢出则在设计说明中明。 PLC控制在工业领域的发展。理解液压装
微机控制技术实验报告
《微机控制技术》课程设计报告 课题:最少拍控制算法研究专业班级:自动化1401 姓名: 学号: 指导老师:朱琳琳 2017年5月21日
目录 1. 实验目的 (3) 2. 控制任务及要求 (3) 3. 控制算法理论分析 (3) 4. 硬件设计 (5) 5. 软件设计 (5) 无纹波 (5) 有纹波 (7) 6. 结果分析 (9) 7. 课程设计体会 (10)
1.实验目的 本次课程设计的目的是让同学们掌握微型计算机控制系统设计的一般步骤,掌握系统总体控制方案的设计方法、控制算法的设计、硬件设计的方法。学习并熟悉最少拍控制器的设计和算法;研究最少拍控制系统输出采样点间纹波的形成;熟悉最少拍无纹波控制系统控制器的设计和实现方法。复习单片机及其他控制器在实际生活中的应用,进一步加深对专业知识的认识和理解,使自己的设计水平、对所学知识的应用能力以及分析问题解决问题的能力得到全面提高。 2.控制任务及要求 1.设计并实现具有一个积分环节的二阶系统的最少拍有纹波控制和无纹波控制。 对象特性G (s )= 采用零阶保持器H 0(s ),采样周期T =,试设计单位阶跃,单位速度输入时的有限拍调节器。 2.用Protel 、Altium Designer 等软件绘制原理图。 3.分别编写有纹波控制的算法程序和无纹波控制的算法程序。 4.绘制最少拍有纹波、无纹波控制时系统输出响应曲线,并分析。 3.控制算法理论分析 在离散控制系统中,通常把一个采样周期称作一拍。最少拍系统,也称为最小调整时间系统或最快响应系统。它是指系统对应于典型的输入具有最快的响应速度,被控量能经过最少采样周期达到设定值,且稳态误差为定值。显然,这样对系统的闭环脉冲传递函数)(z φ提出了较为苛刻的要求,即其极点应位于Z 平面的坐标原点处。 1最少拍控制算法 计算机控制系统的方框图为: 图7-1 最少拍计算机控制原理方框图 根据上述方框图可知,有限拍系统的闭环脉冲传递函数为: ) ()(1)()()()()(z HG z D z HG z D z R z C z +==φ (1) )(1)()(11)()()(1z z HG z D z R z E z e φφ-=+== (2) 由(1) 、(2)解得:
自动控制实验报告1
东南大学自动控制实验室 实验报告 课程名称:自动控制原理 实验名称:闭环电压控制系统研究 院(系):仪器科学与工程专业:测控技术与仪器姓名:学号: 实验室:常州楼五楼实验组别:/ 同组人员:实验时间:2018/10/17 评定成绩:审阅教师: 实验三闭环电压控制系统研究
一、实验目的: (1)通过实例展示,认识自动控制系统的组成、功能。 (2)会正确实现闭环负反馈。 (3)通过开、闭环实验数据说明闭环控制效果。 二、实验原理: (1)利用各种实际物理装置(如电子装置、机械装置、化工装置等)在数学上的“相似性”,将各种实际物理装置从感兴趣的角度经过简化、并抽象成相同的数学形式。我们在设计控制系统时,不必研究每一种实际装置,而用几种“等价”的数学形式来表达、研究和设计。又由于人本身的自然属性,人对数学而言,不能直接感受它的自然物理属性,这给我们分析和设计带来了困难。所以,我们又用替代、模拟、仿真的形式把数学形式再变成“模拟实物”来研究。这样,就可以“秀才不出门,遍知天下事”。实际上,在后面的课程里,不同专业的学生将面对不同的实际物理对象,而“模拟实物”的实验方式可以做到举一反三,我们就是用下列“模拟实物”——电路系统,替代各种实际物理对象。 (2)自动控制的根本是闭环,尽管有的系统不能直接感受到它的闭环形式,如步进电机控制,专家系统等,从大局看,还是闭环。闭环控制可以带来想象不到的好处,本实验就是用开环和闭环在负载扰动下的实验数据,说明闭环控制效果。自动控制系统性能的优劣,其原因之一就是取决调节器的结构和算法的设计(本课程主要用串联调节、状态反馈),本实验为了简洁,采用单闭环、比例调节器K。通过实验证明:不同的K,对系性能产生不同的影响,以说明正确设计调节器算法的重要性。 (3)为了使实验有代表性,本实验采用三阶(高阶)系统。这样,当调节器K值过大时,控制系统会产生典型的现象——振荡。本实验也可以认为是一个真实的电压控制系统。 三、实验设备: THBDC-1实验平台 四、实验线路图: 五、实验步骤:
计算机控制系统实验报告
南京理工大学 动力工程学院 实验报告 实验名称最少拍 课程名称计算机控制技术及系统专业热能与动力工程 姓名学号 成绩教师任登凤
计算机控制技术及系统 一、 实验目的及内容 通过对最少拍数字控制器的设计与仿真,让自己对最少拍数字控制器有更好的理解与认识,分清最少拍有纹波与无纹波控制系统的优缺点,熟练掌握最少拍数字控制器的设计方法、步骤,并能灵巧地应用MATLAB 平台对最少拍控制器进行系统仿真。 (1) 设计数字调节器D(Z),构成最少拍随动控制系统,并观察系统 的输出响应曲线; (2) 学习最少拍有纹波系统和无纹波系统,比较两系统的控制品质。 二、实验方案 最少拍控制器的设计理论 r (t ) c(t ) e*(t) D (z) E (z) u*(t) U (z) H 0(s )C (z) Gc (s ) Φ(z) G(z) R(z) 图1 数字控制系统原理图 如图1 的数字离散控制系统中,G C (S)为被控对象,其中 H(S)= (1-e -TS )/S 代表零阶保持器,D(Z)代表被设计的数字控制器,D(Z)的输入输出均为离散信号。 设计步骤:根据以上分析 1)求出广义被控对象的脉冲传递函数G (z ) 2)根据输入信号类型以及被控对象G (z )特点确定参数q, d, u, v, j, m, n 3)根据2)求得参数确定)(z e Φ和)(z Φ 4)根据 )(1) ()(1)(z z z G z D Φ-Φ= 求控制器D (z ) 对于给定一阶惯性加积分环节,时间常数为1S ,增益为10,采样周期T 为1S 的对象,其传递函数为:G C (S) =10/S(S+1)。 广义传递函数: G(z)=Z [])()(s G s H c ?=Z ?? ?????--)(1s G s e c Ts =10(1-z -1 )Z ??????+)1(12s s =3.68×) 368.01)(1() 717.01(1 111------+z z z z
网络程序设计实验报告-Winsock编程接口实验
网络程序设计 实验报告 实验名称: Winsock编程接口实验 实验类型:____验证型实验_____ __ 指导教师:______________________ 专业班级:_____________________ 姓名:_______________________ 学号:_____________________ 电子邮件:____________ 实验地点:______ _______ 实验日期2013 年 3 月29 日 实验成绩:__________________________
一、实验目的 ●掌握Winsock的启动和初始化; ●掌握gethostname(),gethostbyname(),GetAdaptersInfo()等信息查询函数的使用。 二、实验设计 由实验内容可以知道: 1、编写程序能同时实现对多个域名的解析。比如在控制台输入:getip https://www.360docs.net/doc/d25845520.html, https://www.360docs.net/doc/d25845520.html,,能输出https://www.360docs.net/doc/d25845520.html,和https://www.360docs.net/doc/d25845520.html,对应的IP地址列表。 2、编写程序获取并输出本地主机的所有适配器的IP地址,子网掩码,默认网关,MAC 地址。 首先要了解一些基本的知识gethostname(),gethostbyname(),GetAdaptersInfo()等信息查询函数的基本知识gethostbyname()返回对应于给定主机名的包含主机名字和地址信息的hostent结构指针。结构的声明与gethostaddr()中一致。 之后要根据内容画出函数流程图
三、实验过程(包含实验结果) 1.在实验过程中调用GetAdaptersInfo()时,出现了undeclared identifier的报错,原因是没有包含其头文件,之后进行一些修改解决了问题. 2.实验结果 3.选择查看本机信息 四、讨论与分析 1.Winsock初始化的作用是什么? 答:使用winsock初始化可加载winsock编程的动态链接库。
综合实验报告
湖南科技大学测控技术和仪器专业 专业综合实验报告 班级 09测控三班 姓名 学号 指导老师付国红王启明 成绩 湖南科技大学机电工程学院 二〇一三年一月五日 目录 一、液压泵站综合控制实验 (3) (一)实验目的 (3) (二)实验内容 (3) 二、液压实验台PLC控制实验 (4) (一)实验目的 (4) (二)实验内容 (4) 三、物探仪器综合设计(①地震超前探测仪)................................. .... . (5) (一)实验目的 (5) (二)实验内容 (5) 四、物探仪器综合设计(②电法勘探仪器)............................ ........... .. (6) (一)实验目的 (6)
(二)实验内容 (6) 五、实验心得................................................................................... ..... .. (7) 一、液压泵站综合控制实验 (一)实验目的 了解液压控制的装置,熟悉PLC编程,并且了解PLC控制在工业领域的发展。理解液压装置的原理并且用于实践生活中去。 (二)实验内容 此实验是液压的测量实验用PLC处理器控制来实现,液压PLC综合控制实验室是我公司根据高校机电一体化对气、电、液控制的教学大纲要求,在我公司专利产品YY-18透明液压传动演示系统的基础上,综合了我公司气动PLC和液压PLC控制实验设备的优点,采用了开放型综合实验台结构,广泛征求专家教授和老师的意见,经不断创新改进研制而成的。是目前集气动控制技术、液压传动控制技术以及PLC可编程序控制器控制技术于一体的理想的综合性实验设备。实验时,它们可以相互辅成,交叉控制。可以让学生直观、感性地对比、了解气、电、液各自具有的特点、特色、及优缺点等。信号采集电路原理设计: (1) 前置放大电路要求有阻抗匹配设计(前置放大器采用集成运放OP07、 采用电压负反馈设计、增益为10、50两档手动设计) (2) 主放大器采用级联组合程控放大、增益动态范围为10至1500倍之内。 (增益程档位要求有30至40梯度之内,具体每档增益值不做具体要求 但要求梯度增益呈线性) (3) 主放大器末端输出值(Up-p)设计为5v,如有溢出则在设计说明中明。 (4) 调理电路中要有工频滤波器设计。 液压实验元件均为透明有机材料制成,透明直观。便于了解掌握几十种常用液压元件的结构、性能及用途。掌握几十种基本实验回路的工作过程及原理。实验时,组装实验回路快捷、方便。同时,配备独立的继电器控制单元进行电气控制,简单实用。通过和PLC比较,,可以加深对PLC可编程序控制器的了解及掌握。 本实验系统采用专用独立液压实验泵站,配直流电机无级调速系统,而且电机速度控制系统内部具有安全限速功能,可以对输出的最高速度进行限制。同时配有数字式高精度转速表,实时测量泵电机组的转速。并且配有油路压力调定功能,可以调定输出压力油的安全工作压力。泵站配有多路压力油输出及回油,可同时对多路液压回路进行供油回油。并采用闭锁式快速接头,以利于快速接通或封闭油路。实现油箱、油泵、直流
计算机控制系统实验报告
计算机控制系统实验报告 学院:核自院 姓名:李擂 专业:电气工程及其自动化 班级:电气四班 学号:201006050407
实验一采样实验 一.实验目的 了解模拟信号到计算机控制的离散信号的转换—采样过程。 二.实验原理及说明 采样实验框图如图4-3-1所示。计算机通过模/数转换模块以一定的采样周期对B5单元产生的正弦波信号采样,并通过上位机显示。 在不同采样周期下,观察比较输入及输出的波形(失真程度)。 图4-3-1采样实验框图 计算机编程实现以不同采样周期对正弦波采样,调节函数发生器(B5)单元的“设定电位器1”旋钮,并以此作为A/D采样周期T。改变T 的值,观察不同采样周期下输出波形与输入波形相比的复原程度(或失真度)。 对模拟信号采样首先要确定采样间隔。采样频率越高,采样点数越密,所得离散信号就越逼近于原信号。采样频率过低,采样点间隔过远,则离散信号不足以反映原有信号波形特征,无法使信号复原,。 合理的采样间隔应该是即不会造成信号混淆又不过度增加计算机的工作量。采样时,首先要保证能反映信号的全貌,对瞬态信号应包括整个瞬态过程;信号采样要有足够的长度,这不但是为了保证信号的完整,而且是为了保证有较好的频率分辨率。 在信号分析中,采样点数N一般选为2m的倍数,使用较多的有512、1024、2048、4096等。 三、实验内容及步骤 采样实验框图构成如图4-3-1所示。本实验将函数发生器(B5)单元“方波输出”作为采样周期信号,正弦波信号发生器单元(B5)输出正弦波,观察在不同的采样周期信号对正弦波采样的影响。 实验步骤: (1)将函数发生器(B5)单元的正弦波输出作为系统输入,方波输出作为系统采样周期输入。 ①在显示与功能选择(D1)单元中,通过上排右按键选择“方波/正弦波”的指示灯亮,(B5)模块“方波输出”测孔和“正弦波输出”测孔同时有输出。‘方波’的指示灯也亮,调节B5单元的“设定电位器1”,使之方波频率为80Hz左右(D1单元右显示)。 ②再按一次上排右按键,“正弦波”的指示灯亮(‘方波’的指示灯灭),B5的量程选择开关S2置上档,调节“设定电位器2”,使之正弦波频率为0.5Hz(D1单元右显示)。调节B5单元的“正弦波调幅”电位器,使之正弦波振幅值输出电压= 2.5V左右(D1单元左显示)。(3)构造模拟电路:按图4-3-1安置短路套及测孔联线,表如下。 (4)运行、观察、记录: ①再运行LABACT程序,选择微机控制菜单下的采样和保持菜单下选择采样实验项目,就会弹出虚拟示波器的界面,点击开始后将自动加载相应源文件,即可选用本实验配套的虚拟示波器(B3)单元的CH1测孔测量波形
网络编程实验报告
实验一TCP Socket API程序设计 一、预备知识 1.网络编程基本概念 网络上的计算机间的通讯,实质上是网络中不同主机上的程序之间的通讯。在互联网中使用IP地址来标识不同的主机,在网络协议中使用端口号来标识主机上不同进程,即使用(IP地址,端口号)二元组。 套接字(Socket)用于描述IP地址和端口,是一个通信链的句柄,通信时一个网络程序将要传输的一段信息写入它所在主机的Socket中,该Socket通过与网络接口卡相连的传输介质将这段信息发送到另一台主机的Socket中,以供其他程序使用。 图1-1 TCP通信流程 2.TCP通信流程 TCP程序是面向连接的,程序运行后,服务器一直处于监听状态,客户端与
服务器通信之前必须首先发起连接请求,由服务器接收请求并在双方之间建立连接后才可以互相通信。 二、实验目的 1.了解Winsock API编程原理; 2.掌握TCP Socket程序的编写; 3.了解C/S模式的特点; 4.学会解决实验中遇到的问题。 三、实验任务 使用Winsock API相关类实现TCP Socket通信程序,并能成功运行。 四、实验环境及工具 1. Windows2000/XP/7 2. Visual C++开发平台 3. Visual Studio2010 五、实验内容和步骤 参照《Visual C++网络编程教程》书中81页,TCP Socket API程序设计。 连接: void CChatClientDlg::OnConnect() { WSADATA wsd; //WSADATA结构 WSAStartup(MAKEWORD(2,2),&wsd); //加载协议,使用Winsock 2.2版 m_client = socket(AF_INET,SOCK_STREAM,0); //创建流式套接字 //服务器地址 sockaddr_in serveraddr; UpdateData(); if(ServerIP.IsBlank()) { AfxMessageBox("请指定服务器IP!"); return; } if(sPort.IsEmpty()) { AfxMessageBox("请指定端口!"); return; }
会计学专业综合实验课实验报告
会计学专业综合实验课实验报告 一、实验目的 会计模拟实验是缩短理论教学与社会实践的距离,培养我们动手能力的一个重要途径。通过实践使我们能比较系统、全面的掌握制造企业会计核算的基本程序和方法,加强对基本理论知识的理解,基本方法的运用和基本技能的训练,为将来会计工作打下坚实的基础。”课程要求我们同学各自独立完成全部会计模拟实验的内容,以便全面系统的掌握各项技能。通过实践将理论与实践结合起来,熟悉并掌握会计流程的各个步骤的具体操作,掌握会计的基本操作技能,加强理论知识的记忆,将书本上的理论知识运用到实践中去,真正的掌握这门知识。 二、实验原理 基于《会计基础工作规范》的要求,进行会计实验操作。 三、实验设备 福思特多媒体会计模拟实验室软件 四、结果预测 熟练掌握填制原始凭证和记账凭证,登记会计账簿,更正错误,财务报表编制。 五、实验步骤 (1)根据经济业务填制原始凭证 (2)根据原始凭证,填记帐凭证 (3)根据记帐凭证填各种明细帐,现金日记帐,银行日记帐(4)根据科目汇总表填总分类帐 (5)更正试例 (6)填写会计报表 六、实验结果 (一)原始凭证共363张 (二)记账凭证共173号213张
(三)科目汇总表共2号2张(四)总账账户共75个 (五)日记账账户共4个 (六)明细账账户共74个,其中 1、三栏式账户54个 2.数量金额式账户4个 3.多栏式账户16个 4.其他: (七)手工编制的报表 1、资产负债表(截图)
2.利润表(截图) 3.现金流量表(截图)
4.所有者权益变动表(截图) 七、实验分析
经过这些天的模拟实验、手工记账,使我的会计知识在实际工作中得到了验证,进一步深刻了我对会计的了解。加强了一定的基本实际操作能力,对会计流程的各个步骤和具体操作有了进一步的了解。同时,在这个过程中我学习到了很多之前没有留意到的会计处理知识和细节 (1)有一部分原始凭证的日期是需要大写的,且大部分的金额填写也是要大写的。而且,为了防止被他人恶意篡改,一些日 期的填写是需要添加“零”或者“壹”的,比如一月,在填 写汇票之类的应该写成“零壹月”;十一月,十二月应该写 成“壹拾壹月“,“壹拾贰月”。 (2)在填写记账凭证时,要填写完分录时应该将下面的空白处划上斜线,并且要注意在金额前面填上“¥”符号。这是我在 填写记账凭证的时候时常会忘记的细节。 (3)现金日记账和银行存款日记账每天都要结出“本日发生额和余额”,这也是经常性忽略的一个细节。 (4)在填写明细账时,分录涉及的每一个科目都要填写,之前一直以为只需要填写一个科目,导致了很多错误。 (5)在填写明细账的时候,很多时候不知道要选择什么样的格式,在三栏式和多栏式找科目找了很久,主要是因为初财的内容 不太扎实,所以导致了这种情况,在回忆了初级财务会计之 后,操作起来熟练了很多。 (6)15日填写科目汇总表的时候,没有理解清楚概念,将科目
工控机实验报告
工业控制计算机实验报告 电气211 宋少杰 2120302078
实验一A/D、D/A 转换实验 一、实验目的 1.了解温控系统的组成。 2.了解NI 测量及自动化浏览器的使用并对数据采集卡进行设置。 3.了解Dasylab 软件的各项功能,并会简单的应用。 4.通过实验了解计算机是如何进行数据采集、控制的。 二、实验设备 微型计算机、NI USB 6008 数据采集卡、温度控制仪、温箱。 三、实验内容 1.了解温度控制系统的组成。 2.仔细观察老师对数据采集卡输入输出任务建立的过程及设置还有dasylab 基本功能 的演示。 3.仔细阅读dasylab 相关文档,了解其基本使用方法。 4.动手实践,打开范例,仔细揣摩,并独立完成数据采集卡输入输出任务的建立并建 立并运行虚拟的AD 及DA 系统,完成之后,按照自己的需要及兴趣搭建几个简单的系统运行。 四、温控系统的组成 计算机温度控制系统由温度控制仪与计算机、数据采集卡一起构成,被控对象为温箱, 温箱内装有电阻加热丝构成的电炉,还有模拟温度传感器A D590。 系统框图如图1-1 所示:
图 1-3 图 1-1系 统框图 五、温控仪基本工作原理 温度控制仪由信号转换电路、电压放大电路、可控硅移相触发器及可控硅加 热电路组成。 被控制的加热炉允许温度变化范围为 0~100℃.集成电路温度传感器 AD590(AD590 温 度传感器输出电流与绝对温度成正比关系,灵敏度为 1uA/K).将炉温的变化转换为电流的变化送入信号转换、电压放大电路.信号转换电路将 AD590 送来的电流信号转换为电压信号, 然后经精密运算放大器放大、滤波后变为 0~5V 的标准电压信号,一路送给炉温指示仪表, 直接显示炉温值。另一路送给微机接口电路供计算机采样.计算机通过插在计算机 U SB 总线 接口上的 N I USB 6008 12 位数据采集卡将传感器送来的 0~5V 测量信号转换成 0~FFFH 的12 位数字量信号,经与给定值比较,求出偏差值,然后对偏差值进行控制运算,得到控制温度 变化的输出量,再经过 N I USB 6008 将该数字输出量经 12 位 D /A 转换器变为 0~5V 的模拟电 压信号送入可控硅移相触发器,触发器输出相应控制角的触发 脉冲给可控硅,控制可控硅的 导通与关断,从而达到控制炉温的目的。 六、思考题 1.数据采集系统差分输入与单端输入有些什么区别?各有什么优缺点? 答: 单端输入的输入信号均以共同的地线为基准.这种输入方法主要应用于输入信号电压较高(高于1 V),信号源到模拟输入硬件的导线较短(低于15 ft),且所有的输入信号共用一个基准地线.如果信号达不到这些标准,此时应该用差分输入。 对于差分输入,每一个输入信号都有自有的基准地线;由于共模噪声可以被导线所消除,从而减小了噪声误差.单端输入时, 是判断信号与 GND 的电压差. 差分输入时, 是判断两个信号线的电压差. 信号受干扰时, 差分的两线会同时受影响, 但电压差变化不大. (抗干扰性较佳) 而单端输入的一线变化时, GND 不变, 所以电压差变化较大(抗干扰性较差)。
计算机温度控制实验报告1
目录 一、实验目的---------------------------------2 二、预习与参考------------------------------- 2 三、实验(设计)的要求与数据------------------- 2 四、实验(设计)仪器设备和材料清单-------------- 2 五、实验过程---------------------------------2 (一)硬件的连接- --------- ----------------------- 2 (二)软件的设计与测试结果--------------------------3 六、实验过程遇到问题与解决--------------------11 七、实验心得--------------------------------12 八、参考资料-------------------------------12
一、实验目的 设计制作和调试一个由工业控制机控制的温度测控系统。通过这个过程学习温度的采样方法,A/D变换方法以及数字滤波的方法。通过时间过程掌握温度的几种控制方式,了解利用计算机进行自动控制的系统结构。 二、预习与参考 C语言、计算机控制技术、自动控制原理 三、实验(设计)的要求与数据 温度控制指标:60~80℃之间任选;偏差:1℃。 1.每组4~5同学,每个小组根据实验室提供的设备及设计要求,设计并制作出实际电路组成一个完整的计算机温度控制测控系统。 2.根据设备情况以及被控对象,选择1~2种合适的控制算法,编制程序框图和源程序,并进行实际操作和调试通过。 四、实验(设计)仪器设备和材料清单 工业控制机、烘箱、温度变送器、直流电源、万用表、温度计等 五、实验过程 (一).硬件的连接 图1 硬件接线图
labview实验报告
实验报告 课程名称虚拟仪器技术分析与设计 专业测控技术与仪器 班级1301 学号20 姓名郭鹏 实验一 LabVIEW虚拟温度检测系统 一、实验目的 1.了解LabVIEW的编程环境。
2.掌握LabVIEW的基本操作方法,并编制简单的程序。 3.学习建立子程序的过程 二、实验内容 1.建立一个测量温度的VI。 a.实验步骤 1)选择File?New,打开一个新的前面板窗口。 2)从Controls?Numeric中选择Tank放到前面板中。 3)从“结构”里选择一个for循环,用一个随机数乘与100输出到温度计 b.实验结果 前面板图: 程序框图: 三、实验总结 1.总结VI基本编程的快捷操作。 答:显示程序框图或前面板ctrl+E 框图中,对象的移动:shift+鼠标选择移动;对象的复制:ctrl+鼠标选择移动; 对象的删除:鼠标选择,按<退格>;前面板与框图并排:ctrl+T 工具(Tools)模板:在前面板或框图中按住
计算机控制系统实验报告2
江南大学物联网工程学院 《计算机控制系统》 实验报告 实验名称实验二微分与平滑仿真实验 实验时间2017.10.31 专业班级 姓名学号 指导教师陈珺实验成绩
一、实验目的与要求 1、了解微分对采样噪音的灵敏响应。 2、了解平滑算法抑制噪音的作用。 3、进一步学习MATLAB 及其仿真环境SIMULINK 的使用。 二、仿真软硬件环境 PC 机,MATLAB R2012b 。 三、实验原理 如图微分加在正反馈输入端,计算机用D(Z)式进行微分运算。R 为阶跃输入信号,C 为系统输出。由于微分是正反馈,当取合适的微分时间常数时,会使系统响应加快。若微分时间常数过大,则会影响系统稳定性。 四、D(Z)设计 1、未平滑时的D(Z) 用一阶差分代替微分运算: )1()()()(1--==Z T T Z X Z Y Z D D 式中T D为微分时间常数,T 为计算机采样周期。 2、平滑后的D(Z) 微分平滑运算原理如图: 取Y *(k)为四个点的微分均值,有 )331(6)()()( )33(6 )5 .15.05.05.1(4)( 321321221*-----------+==∴--+=-+-+-+-= Z Z Z T T Z X Z Y Z D X X X X T T X X X X X X X X T T K Y D K K K K D K K K K D x t + ○R
五、SIMULINK仿真结构图 七、思考题 1、微分噪音与采样噪音和采样周期T有什么关系?与微分时间常数有什么关系? 2、平滑后系统输出有无改善?是否一定需要平滑?
专业综合实验报告
2011级专业综合实验报告 姓名: 班级: 学号: 专业: 指导老师: 时间: 组员:
目录 实验一日用化学品复配实验——洗衣用洗涤剂 (1) 实验二日用化学品复配实验——VE高级营养霜 (8) 实验三日用化学品复配实验——香波 (10) 实验四日用化学品复配实验——香水花露水 (12) 实验五果胶的提取与分析 (16) 实验六一种含N-P-Al阴离子配合物的制备及其对棉布的阻燃性 .. 20 实验七阿司匹林的合成 (23)
实验一日用化学品复配实验——洗衣用洗涤剂 一、实验目的 1、掌握洗涤剂的配方设计及检验方法。 2、掌握泡沫测定法。 二、实验概要 洗涤剂洗衣服一般最常用的是洗衣粉。洗衣粉的生产,一是要将液体原料(烷基苯磺酸钠、硅酸钠等)喷雾干燥成粉;二是固体原料(三聚磷酸钠、NaCO 3 )溶解成浆状再喷雾干燥成粉。而人们在使用时,洗衣粉又要溶解成水溶液才能进行洗涤。这样生产时耗用大量热能与工时,使用亦有不便。而液体洗涤剂制法简单,节能,使用方便,尤其在洗衣机中使用,更受重视。 洗衣用洗涤既要有较好的去污能力,又要在寒冷冬季和酷热的夏季都能保证透明,不分层、不混浊、不沉淀,并具有一定的粘度。因此虽然生产设备简单,但配方设计却不那么容易。配方中一般包含去污作用的表面活性剂,增加溶解度的增溶剂,适用硬水洗涤的螯合剂,同时还有缓冲剂,增粘剂、增泡剂等。 本实验就是洗涤剂配方设计选择并对其质量进行检测。 三、实验仪器和药品 吸滤瓶500ml 酚酞指示剂 古氏坩埚25—30ml 硝酸 乙醇95% 铬酸钾5% 无水乙醇AgNO 3 标准液0.1N PH试纸罗氏泡沫测定仪 量筒1000ml分液漏斗 无水CaCl 2 1000ml容量瓶 MgSO 4·7H 2 O NaOH 漂白布1张炭黑布4张 电动搅拌白度计QBDJ–1型电炉(500W)搪瓷盘
传感器检测技术实验报告
《传感器与检测技术》 实验报告 姓名:学号: 院系:仪器科学与工程学院专业:测控技术与仪器实验室:机械楼5楼同组人员: 评定成绩:审阅教师:
传感器第一次实验 实验一 金属箔式应变片——单臂电桥性能实验 一、实验目的 了解金属箔式应变片的应变效应及单臂电桥工作原理和性能。 二、基本原理 电阻丝在外力作用下发生机械形变时,其电阻值发生变化,这就是电阻应变效应。 金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它反映被测部位受力状态的变化。电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。单臂电桥输出电压 1/4o U EK ε=,其中K 为应变灵敏系数,/L L ε=?为电阻丝长度相对变化。 三、实验器材 主机箱、应变传感器实验模板、托盘、砝码、万用表、导线等。 四、实验步骤 1. 根据接线示意图安装接线。 2. 放大器输出调零。 3. 电桥调零。 4. 应变片单臂电桥实验。
由matlab 拟合结果得到,其相关系数为0.9998,拟合度很好,说明输出电压与应变计上的质量是线性关系,且实验结果比较准确。 系统灵敏度S = ΔU ΔW =0.0535V/Kg (即直线斜率),非线性误差= Δm yFS = 0.08 10.7 ×100%= 0.75% 五、思考题 单臂电桥工作时,作为桥臂电阻的应变片应选用:(1)正(受拉)应变片;(2)负(受压)应变片;(3)正、负应变片均可以。 答:(1)负(受压)应变片;因为应变片受压,所以应该选则(2)负(受压)应变片。 实验三 金属箔式应变片——全桥性能实验 一、实验目的 了解全桥测量电路的优点 二、基本原理 全桥测量电路中,将受力方向相同的两应变片接入电桥对边,相反的应变片接入电桥邻边。当应变片初始阻值R1=R2=R3=R4、其变化值1234R R R R ?=?=?=?时,其桥路输出电压 3o U EK ε=。其输出灵敏度比半桥又提高了一倍,非线性误差和温度误差都得到了改善。 三、实验器材 主机箱、应变传感器实验模板、托盘、砝码、万用表、导线等。 四、实验步骤 1.根据接线示意图安装接线。 050 100150200 x y
炉温控制实验报告 -计算机控制系统
Beijing Jiaotong University 计算机控制系统实验 炉温控制实验 学院:电子信息工程学院 姓名: 学号: 指导教师: 时间:
炉温控制实验 一、实验目的 1、了解温度控制系统的特点。 2、研究采样周期T对系统特性的影响。 3、研究大时间常数系统PID控制器的参数的整定方法。 二、实验仪器 1、计算机控制系统实验箱一台 2、PC计算机一台 3、炉温控制实验对象一台 三、基本原理 1、系统结构图示于图1-1。 图1-1 系统结构图 图中 Gc(s)=Kp(1+Ki/s+Kds) Gh(s)=(1-e-TS)/s Gp(s)=1/(Ts+1) 2、系统的基本工作原理 整个炉温控制系统由两大部分组成,第一部分由计算机和A/D&D/A卡组成,主要完成温度采集、PID运算、产生控制可控硅的触发脉冲,第二部分由传感器信号放大,同步脉冲形成,以及触发脉冲放大等组成。炉温控制的基本原理是:改变可控硅的导通角即改变电热炉加热丝两端的有效电压,有效电压的可在0~140V内变化。可控硅的导通角为0~5CH。温度传感是通过一只热敏电阻及其放大电路组成的,温度越高其输出电压越小。外部LED灯的亮灭表示可控硅的导通与
闭合的占空比时间,如果炉温温度低于设定值则可控硅导通,系统加热,否则系统停止加热,炉温自然冷却到设定值。 3、PID递推算法: 如果PID调节器输入信号为e(t),其输送信号为u(t),则离散的递推算法为: Uk=Kpek+Kiek2+Kd(ek-ek-1) 其中ek2是误差累积和。 四、实验内容: 1、设定炉子的温度在一恒定值。 2、调整P、I、D各参数观察对其有何影响。 五、实验步骤 1、启动计算机,双击桌面“计算机控制实验”快捷方式,运行软件。 2、测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查找原因使通信正常后才可以继续进行实验。 3、20芯的扁平电缆连接实验箱和炉温控制对象,检查无误后,接通实验箱和炉温控制的电源。 4、在实验项目的下拉列表中选择实验七[七、炉温控制] 鼠标单击按钮,弹出实验课题参数设置对话框,选择PID,在参数设置窗口设置炉温控制对象的给定温度以及Ki、Kp、Kd值,点击确认在观察窗口观测系统响应曲线。测量系统响应时间Ts和超调量。 5、重复步骤4,改变PID参数,观察并记录波形的变化。 六、PID参数整定 1、比例部分整定。 首先将积分系数KI和微分系数KD取零,即取消微分和积分作用,采用纯比例控制。将比例系数KP由小到大变化,观察系统的响应,直至速度快,且有一定范围的超调为止。如果系统静差在规定范围之内,且响应曲线已满足设计要求,那么只需用纯比例调节器即可。
算法程序设计实验报告
程序设计》课程设计 姓名:王 学号:20100034 班级:软件工程00 班 指导教师:王会青 成绩: 2010年 6 月 实验一.构造可以使n 个城市连接的最小生成树 专业:__软件工程___ 班级:__软件姓名:_王___ 学号:_20100034 完成日期:_2010/6/26 ________ 一、【问题描述】给定一个地区的n 个城市间的距离网,用Prim 算法或Kruskal 算法建立最小生成树,并计算得到的最小生成树的代价。 1 城市间的道路网采用邻接矩阵表示,邻接矩阵的存储结构定义采用课本中给出的定义,若两个城市之间不存在道
路,则将相应边的权值设为自己定义的无穷大值。 2 显示出城市间道路网的邻接矩阵。 3 最小生成树中包括的边及其权值,并显示得到的最小生成树的总代价。 4 输入城市数、道路数→输入城市名→输入道路信息→执行Kruskal 算法→执行Prim 算法→输出最小生成树 二、【问题分析】 1. 抽象数据类型结构体数组的定义: #ifnd ef ADJACENCYMATRIXED// 防止该头文件被重复引用 #define ADJACENCYMATRIXED // 而引起的数据重复定义 #define INFINITY 32767 // 最大值∞ #define MAX_VERTEX_NUM 20 // 最大顶点个数 typedef int VRType; // 权值,即边的值 typedef char InfoType; // 附加信息的类型,后面使用时会定义成一个指针 typedef char VertexType[MAX_VERTEX_NUM]; // 顶点类型 typedef enum {DG=1, DN, UDG, UDN} GraphKind; //{ 有向图,有向网,无向图,无向网} typedef struct ArcCell { VRType adj; //VRType 是顶点关系类型。对无权图,用1 或0 表示相邻否;对带权图,则为权值类型。 InfoType*info; // 该弧关系信息的指针
传感器检测技术实验报告材料
《传感器与检测技术》 实验报告
姓 名: 学 号: 院 系:仪器科学与工程学院 专 业: 测控技术与仪器 实 验 室: 机械楼5楼 同组人员: 评定成绩: 审阅教师: 传感器第一次实验 实验一 金属箔式应变片——单臂电桥性能实验 一、实验目的 了解金属箔式应变片的应变效应及单臂电桥工作原理和性能。 二、基本原理 电阻丝在外力作用下发生机械形变时,其电阻值发生变化,这就是电阻应变效应。 金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它反映被测部位受力状态的变化。电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。单臂电桥输出电压 1/4o U EK ε=,其中K 为应变灵敏系数,/L L ε=?为电阻丝
长度相对变化。 三、实验器材 主机箱、应变传感器实验模板、托盘、砝码、万用表、导线等。 四、实验步骤 1.根据接线示意图安装接线。 2.放大器输出调零。 3.电桥调零。 4.应变片单臂电桥实验。 测得数据如下,并且使用Matlab的cftool工具箱画出实验点的线性拟合曲线:
050 100150200 246810x y untitled fit 1y vs. x 由matlab 拟合结果得到,其相关系数为0.9998,拟合度很好,说明输出电压与应变计上的质量是线性关系,且实验结果比较准确。 系统灵敏度 (即直线斜率),非线性误差= = 五、思考题 单臂电桥工作时,作为桥臂电阻的应变片应选用:(1)正(受拉)应变片;(2)负(受压)应变片;(3)正、负应变片均可以。 答:(1)负(受压)应变片;因为应变片受压,所以应该选则(2)负(受压)应变片。