信号与线性系统题解 阎鸿森 第六章

信号与线性系统题解 阎鸿森 第六章 习题答案
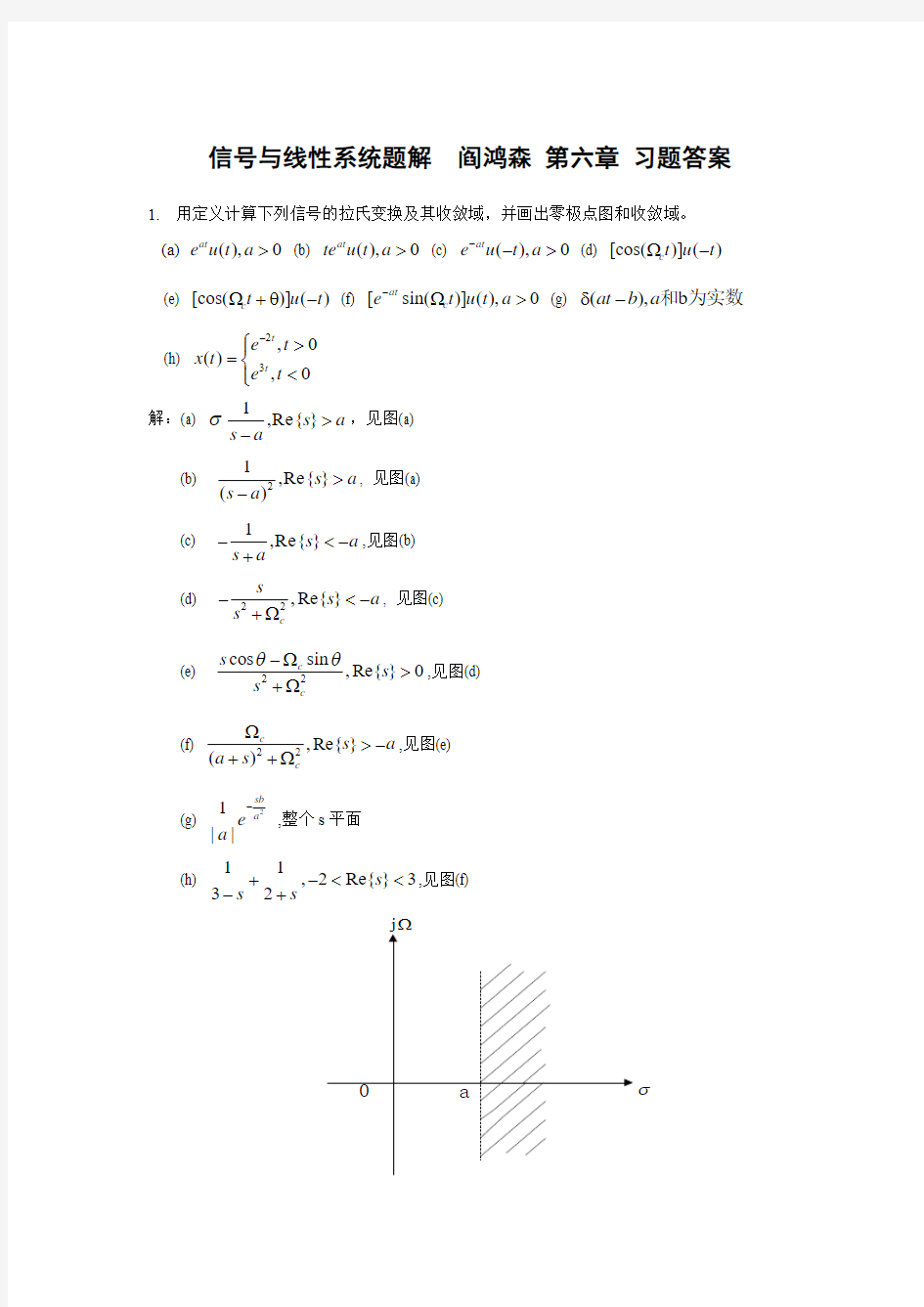
1. 用定义计算下列信号的拉氏变换及其收敛域,并画出零极点图和收敛域。 (a)(),0at e u t a > (b) (),0at te u t a > (c) (),0at
e u t a --> (d) [cos()]()c t u t Ω-
(e) [cos()]()c t u t Ω+θ- (f) [sin()](),0at
c e
t u t a -Ω> (g) (),b at b a δ-和为实数
(h) 23,0(),0
t t e t x t e t -?>?
=?
解:(a)
σ
1
,Re{}s a s a
>-,见图(a) (b)
2
1
,Re{}()
s a s a >-, 见图(a) (c) 1
,Re{}s a s a
-<-+,见图(b)
(d) 22
,Re{}c
s
s a s -
<-+Ω, 见图(c) (e)
22
cos sin ,Re{}0c c
s s s θθ
-Ω>+Ω,见图(d) (f)
22
,Re{}()c
c
s a a s Ω>-++Ω,见图(e)
(g) 2
1||
sb
a e a - ,整个s 平面
(h)
11,2Re{}332s s s
+-<<-+,见图(f) j Ω
a
0σ
(a)
jΩ
σ
a-
(b)
jΩ
σ
(c)
jΩ
σ0
(d)
a-
jΩ
σ
(e)
2-3
jΩ
σ
(f)
2.用定义计算图P6.2所示各信号的拉氏变换式。
X(t)
1
T
t
(a)
1
2
X(t)
123t
(b)
T
t
1
X(t)
(c)
1
T
t
X(t)
(d)
1
T/2
t
X(t)T
(e)
π
0X(t)
t
sin t
π
(f)
解: (a)
222
sin 111sin [()()]111
st sT st
s te dt
e t u t u t e dt e s s s π
--+∞
--π
-∞-=--π=-?=+++?
?0
1
(1)T
st sT e dt e s
--=-?
(b)
1
2
3
1
2
223232121
(1)()()1
(1)st
st
st s s s s s s s s e dt e dt e dt
e e e e e s s s e e e s -----------++=-+-+-=+--?
?? (c) 20111(1)T st sT sT te dt e e T s Ts
---=-+-?
(d)
0221(1)11111
(1)(1)(1)T
st sT sT sT sT t e dt T e e e e s Ts s s Ts
------
+=--+-=--?
(e) 2222221212()(1)[(1)]sT
sT sT s
X s e e e e s Ts s Ts
----=-+-+--
(f)
s
222
sin 111sin [()()]111
st sT st s te dt
e t u t u t e dt e s s s π
--+∞
--π
-∞-=--π=-?=+++?
?
3. 对图P6.3所示的每一个零极点图,确定满足下述情况的收敛域。 (a) x(t)的傅立叶变换存在。 (b) 2()t
x t e 的傅立叶变换存在 (c) ()0,0x t t => (d) ()0,5x t t =<
解:(a) x(t)的傅立叶变换存在,则j s =Ω应在()X s 的收敛域内 图(a) 1Re{}1s -<< 图(b) 3Re{}3s -<< 图(c) Re{}1s >-
(b) 2()t
x t e 的傅立叶变换存在,则s =-2轴一定在()x s 的收敛域内 图(a), Re{}1s <- 图(b), 3Re{}3s -<< 图(c), 3Re{}1s -<<- (c) x(t)=0,t>0,则x(t)为左边信号 图(a),Re{}1s <- 图(b),Re{}3s <- 图(c), Re{}3s <-
(d) x(t)=0, t<5,则x(t)为右边信号 图(a), Re{s}>1 图(b), Re{s}>3 图(c), Re{s}>-1
4. 针对图P6.4所示的每一个信号的有理拉氏变换的零极点图,确定:
(a) 拉氏变换式。
(b) 零极点图可能的收敛域,并指出相应信号的特征。 解: 图(a) 拉氏变换为 (1)
()(3)(1)
s X s k s s -=?
++,k 为常数。
收敛域Re{}3s <-时,信号为左边信号 为Re{}1s <-时,信号为右边信号。 为3Re{}1s -<<-时,信号为双边信号
图(b) 拉氏变换为21
()(2)(1)(1)
s X s k s s s +=?++-
收敛域Re{}2s <-时,信号为左边信号
为Re{}1s >时,信号为右边信号。
为
2Re{}11Re{}1s s -<<-?
?-<
时信号为双边信号时时,信号为双边信号
5. 在正文中我们提到,虽然拉氏变换的收敛性比傅立叶变换收敛性要强,但并不是任何信号的拉氏变换都存在。对下列信号,判断拉氏变换是否存在。若存在,请求出其拉氏变换 及其收敛域
(a) ()tu t (b) ()t t u t (c) 2()t
te u t - (d) 2()t e u t (e) ()t
e e u t (f) ,0
(),0
t t e t x t e t -???
解: (a) 存在
21
s
,Re{}0s > (b) (c) 存在
2
1
(2)
s +,Re{}2s >- (d) (e) (f)不存在 6.若已知1
{()}u t s
?=,收敛域为Re{}0s >,试利用拉氏变换性质,求下列信号的拉氏变换及其收敛域。 (a)2()t
e
u t -[cos()]()c t u t Ω (b) [sin()cos()]()c c t t u t Ω+Ω (c) [cos()]()at e t u t β-
(d) [cos()]()c t t u t Ω (e) [cos()]()at
c te
t u t -Ω (f) ()t e u t T --
(g) ()t
te u t T -- (h) '
()t t δ (i) 2''
()t t δ (j)
()k k a t kT ∞
=δ-∑
(k) 2(1)t u t -
(l) 0
()t t e u t T -+- (m) 2[cos()]()c t t u t Ω (n) [sin()]()c t u t T Ω-
(o)
sin()t
c d ττΩ?
(p) 1(1)()at t e u t ---
解: (a)
2,Re{}0c
s
s s 2
>+Ω (b)
2,Re{}0c
c
s s s 2
+Ω>+Ω (c)
2,Re{}()c
s s s β
αβ2
+>-++Ω (d) 22
2
2
,Re{}0()
c c s s s 2-Ω>+Ω
(e) 22
2(),Re{}()c c
s s s βββ2
+-Ω>-++Ω (f) (1)Re{}11
s T
e s s -+>-+
(g)
(1)2
1,Re{}1(1)
s T
Ts T e s s -+++>-+ (h) -1, Re{}s R ∈ (i) 1, Re{}s R ∈
(j) 1ln ,||1sT a
s ae T
->
- (k) 23112(),Re{}02s e s s s s
-++> (l) 0
(1)1
s T
t e e
s -+-?
+ (m) 22223
2(3)
,Re{}0()
c c s s s s Ω->+Ω (n) 2
2(cos cos ),Re{}0()
sT
c c c c e T s T s s -ΩΩ+Ω>+Ω (o)
22
,Re{}0()
c
c s s s Ω>+Ω (p)
22
(2)
,Re{}0()a s a s s s a +>+
7. 求图P6.7所示信号的拉氏变换式及收敛域。
(a)
221
(1)(1),Re{}0s s e e s s ----> (b) 1(1),Re{}01s s
a e ae s s s ---+>+
(c) 021,Re{}0st
e s s
->
(d) 2
2
4(1),Re{}0(1)
s s e s s e --->- (e)
2222
22222222
[(cos sin )],Re{}0(1)
()(1)
1,Re{}0
1c
c
c
c
sT c c c c c c s s s c c c c c
s c
e T s T s s s e
e e
s s s s e
-π-
Ωπ-
πΩ-
Ωπ-ΩΩ-ΩΩ+Ω+Ω+Ω>-Ω=+Ω-+Ω+ΩΩ=?>+Ω+
(f)
2
22
2(1)1,Re{}0(1)
(1)T T s s T
Ts s e e
s s e s e ------=>-+ (g)
11()
()
242(1)(1)
11
1
()(1)
()(1)
s s s
s s e
e
e s e s e τ
τ
τ
τ
-+-+------=+-+-
8. 计算下列X(s)的拉氏反变换: (a)
22
3,Re{}0(1)(4)
s
s s s >++ (c o s c o s 2)(
t t u t - (b)
2
23
,Re{}043s s s s +>++ 313()()22t t
e e u t ---+-
(c)
21
,Re{}3(21)(3)2
s s s s <<+- '32115[()()2()9()]42
t
t
e u t t t e u t T --+δ+δ+-
(d)
21
,Re{}356
s s s s +<-++
322()()t
t
e u t e u t ----+-
(e) 23
2
1
,Re{}1s s s s s
-+>- ()()t t e u t -+
(f)
21
,Re{}156
s s s s +>-++
[cos(2)]()t e t u t -
(g) 321
,1Re{}044s s s s s -+-<<+++
232c o s 2()s i n 2()()510
5
t
t u t t u t e u t --
+-+ (h) 3221,Re{}131
s s s s s ++>-++
2'
3()()2()()t
t
e u t e u t t t --+-δ+δ (i) 32
3
,1Re{}022s s s s s
+-<<++
2
311342222331()c o s ()s i n ()
222
t t s s s s u t e tu t e tu t --+?-++=---
(j) 2
1
,Re{}09s s <+
1sin 3()3
tu t --
9. 已知LTI 系统的系统函数H(s)及输入x(t),求系统的响应y(t). (a) 2
23
(),()()68
s H s x t u t s s +==++ (b) 2
4(),()()(32)
t
s H s x t e u t s s s -+=
=++ (c) 222
2(),()()(9)
t
s s H s x t e u t s s -+==+ (d) 2
1(),()()56t
s H s x t te u t s s -+=
=++ 解: (a) 311151
()84284H s s s s =+-
++ 24315()()()()848
t t
y t u t e u t e u t --=+-
(b) 2
2413()12(1)
s
H s s s s s =
--++++ 2()2()()()3()t
t
t
y t u t e u t e u t te u t ---=---
(c) 1
()sin 3()3y t tu t =
(d) 2311
()()()()22
t t t y t e u t e u t e u t ---=-+
10. 计算下列微积分方程描述的因果系统的系统函数()H s 。若系统最初是松弛的,而且
()()x t u t =,求系统的响应()y t 。
(a) 22
()()()
43()()d y t dy t dx t y t x t dt dt dt ++=+ (b) 22()()()45()d y t dy t dx t y t dt dt dt
++=
如果()x t 为()t
e u t -,系统的响应y(t)又是什么?
解: (a)1
()3H s s =
+ 311()()()33
t
y t u t e u t -=-
(b) 2()45
s
H s s s =++
2()s i n ()
t
y t e
t u t -= 当输入()t
e u t -时,
(a) 311
()()()22t t y t e u t e u t --=
- (b) 2211()()cos ()sin ()33
t t t
y t e u t e tu t e tu t ---=--
11. 已知LTI 因果系统的输入2()()t
x t e u t -=,单位冲激响应()()t
h t e u t -=。 (a) 用时域分析法求系统响应y(t).
(b) 用复频域分析法求系统响应y(t) 解: (a) 2()()()(1)()t t t y t e u e u t d e e u t τττττ+∞
--+---∞
=-=-?
(b)
21
()(1)(2)
()()()
t t Y s s s y t e u t e u t --=
++=-
12. 某LTI 系统的有理系统函数H(s)的零极点及收敛域如图P6.12所示,若H(0)=1。 求: (a) 求产生此输出的输入信号x(t).
(c) 若已知
|()|x t dt +∞
-∞
<∞?
,求输出信号x(t).,
(d) 已知一稳定系统,当输出2()t
e u t -时,输出为上述()x t 中的一个,确定是哪一个?
求出系统的单位冲激响应。
解:(a) 3(2)
()(1)(6)s H s s s -+=
-+
(b) 10(1)
()(1)(2)(5)s H s s s s --=
+++
(c) 2
()(1)(2)H s s s -=
-+
(d) 2
()(1)(2)
H s s s =
--
13. 已知因果全通系统的系统函数1()1
s H s s -=+,输出信号2()()t
y t e u t -= (a) 求产生此输出的输入信号x(t). (b) 若已知
dt ∞
∞
<∞?
+-|x(t)|,求输出信号x(t).
(c) 已知一稳定系统当输入为2()t
e u t -时,输出为上述x(t)中的一个,确定是哪个?求出
系统的单位冲激响应h(t).
解:(a)
2()x t 1
()2
H s s =
+。Re{}2s >-,()1()()(1)(2)Y s s X s H s s s +==
-+ 由于()H s 的ROC 为Re{}1s >-,()X s ∴的ROC 为2Re{}1s -<<或Re{}1s > 若 1ROC 为-2 ()()()33 t t x t e u t e u t -=-- 若2ROC 为Re{s}>1,221()(2)()3 t t x t e e u t -= + 1()x t ,2()x t 分别如图PS6.13(a),(b)所示: (a) (b) (b)若 dt ∞ ∞ <∞? +-|x(t)|,则只能是1()()x t x t = 即:212 ()()()33 t t x t e u t e u t -= -- (c) 11 ()()(),()(1)(2)1 s s X s Y S H s H s s s s ++== ∴= -+-这就是(a)中系统的逆系统。 由于系统稳定∴ROC 为()c u t Re{}1s < ()()2()t h t t e u t =δ-- ()Y s 的ROC 为Re{}2,()s X s >-∴的ROC 为2Re{}1s -<< 21()()2()3 t t x t e u t e u t -= -- 22()*()()2()*()t t t y t h t e u t e u t e u t --=-- 当t>0时,0 22() 21()*()()3 t t t t e u t e u t e e d e u t τττ-----∞ -= =? 当t<0时,22() 21()*()()3 t t t t t e u t e u t e e d e u t τττ-----∞-==-? 212 ()*()()()()33 t t y t h t e u t e u t x t -∴=--= 从而证明该系统当输入为()y t ,输出为()x t 14. 某LTI 系统的零极点如图P6.14所示。 (a) 指出与该零极点分布有关的所有可能的收敛域。 (b) 对(a)中所指出的每一个收敛域,确定相应的系统是否稳定,因果。 解: (a) (,2);(2,1);(1,2);(2,)-∞----+∞ (b) 非因果,稳定;非因果,不稳定;非因果,稳定;因果,不稳定; 15. 对一个LTI 系统,我们已知如下信息:输入信号2()4()t x t e u t =-;输出响应 22()()()t t y t e u t e u t -=-+ (a) 确定系统的系统函数H(s)及收敛域。 (b) 求系统的单位冲激响应h(t) (c) 如果输入信号x(t)为(),t x t e t -=-∞<<+∞ 求输出y(t)。 解:(a) 1 (),Re{}22 H s s s = >-+ (b) 2()()t h t e u t -= (c) ()2()()t t y t e e u d e τ+∞ ---τ--∞ = ττ=? 16. 若系统的单位阶跃响应为2()(1)()t s t e u t -=-,为使输出响应2()()()t t y t e e u t --=-+, 求输出信号()x t 。 解: 1()()2 t x t e u t -= 17. 一个LTI 系统的零极点如图P6.17所示。 (a)确定该系统的逆系统的零极点图。 (b)如果逆系统为稳定系统,求系统的单位冲激响应h(t). (c)如果逆系统为因果系统,求逆系统的单位冲激响应h(t). 解:(a) (b) ()()()t t t e u t e u t -δ++- (c) ()()()t t t e e u t -δ+- 18. 已知x(t)的单位拉氏变换()s ?,试用()s ?表示下列信号的单边拉氏变换。 (a) ()x t T - (b) 0()s t x t e (c) ()t x d -∞ττ? (d) 22() d x t dt (e) ()x at (f) tx(t) 解:(a) 0 ()()sT st T e s x t e dt ---?+? (b) 0()X s s - (c) 设()()t x d s -∞ ττ←?→? ? 则有 ()()()t t x d x d x d -∞ -∞ττ←?→ττ+ττ? ??,由时域积分性质得 1()(() ()) s s x d s -∞ ?=?+ττ? ,也可由定义直接求得。 (d) 2 ' ()(0)(0)s s sX X ++?-- (e) 1()||s X a a (f) ()d X s ds 19.求下列由微分方程描述的增量线性系统的响应y(t): (a) 确定该系统的逆系统的零极点图。 (b) 如果逆系统为稳定系统,求系统的单位冲激响应h(t). (c) 如果逆系统为因果系统,求逆系统的单位冲激响应h(t). 解:(a) 22 ()12()c c sY s Y s s Ω-+= +Ω Y(s)=222 c c s s +Ω+Ω+ 2' 2 2()4()2()()()()t t c c y t e u t t t e u t --=-δ+δ+Ω+Ω (b) 232 23()283()62()s Y s s sY s Y s s s -++-+= + 22341 ()(56)(2) s s s Y s s s s s s +++== +++ 211 ()()()22 t y t u t e u t -= + (c) 2 32 23 ()283()62()s Y s s sY s Y s s s -++-+= + 43322232()(32) s s s Y s s s s -++=++ 2 2111()[3]()222 t t t y t e e u t --=-+-+ (d) 322 3 ()13()332()21 s Y s s s s Y s s sY s s ---+--+-= + 323222 567157 ()(1)(32)1(1)2s s s Y s s s s s s s s s ----==-+-++++++ 277 ()()5()()()22 t t t y t e u t te u t u t e u t ---=--- + 20. 图P6.20所示电路,在t =0以前已经处于稳定状态。当t=0时,开关K 由“1”到“2”,试计算t>0时的()c u t 和()L u t . 解:(a) (0)1c u = () 3()()c c c du t u t u u t dt -- = 3()2 c s u s s +=+ 2()()()t c u t t e u t -=δ+ (b) 3()()()()t L L L u t u t u d u t -∞ -= ττ=? 2 31 ()()2()23 ()21 ()()2() L L L t L u s u s u s s s s u s s u t t e u t -++=+=-=δ+ 21. 对图P6.21(a)所示电路,起输入为图P6.21(b)所示,当0t - =时(0)1c u V - =, (0)0L i - =,求t>0时的()c u t 。 解: 22 ()() 11()22c c i c d u t du t u t u dt dt =--+ 22 11111 ()()()2222 1()11122 s c c c s c e s u s su s u s s s e u s s s ---=-+-++--= -- 2(1)2(1)22 ()2()(1)(1)33 t t t c u t e u t e u t e u t -----=+ --- 22. 图P6.22所示电路,在t<0时已处于稳定状态,在t =0时,开关K 闭合,试求t>0时的 ()c i t 及()L i t 23. 某系统如图P6.23所示,若电路达到稳定状态后,开关K 转换,试求K 转换后的响应 ()c u t 。 . 下载可编辑 . 第六章 6.4 根据下列象函数及所标注的收敛域,求其所对应的原序列。 (1)1)(=z F ,全z 平面 (2)∞<=z z z F ,)(3 (3)0,)(1>=-z z z F (4)∞<<-+=-z z z z F 0,12)(2 (5)a z az z F >-= -,11 )(1 (6)a z az z F <-=-,11 )(1 . 下载可编辑 . 6.5 已知1)(?k δ,a z z k a k -? )(ε,2)1()(-?z z k k ε,试利用z 变换的性质求下列序列的z 变换并注明收敛域。 . 下载可编辑 . (1))(])1(1[2 1k k ε-+ (3))()1(k k k ε- (5))1()1(--k k k ε (7))]4()([--k k k εε (9))()2 cos( )2 1(k k k επ . 下载可编辑 . 6.8 若因果序列的z 变换)(z F 如下,能否应用终值定理?如果能,求出)(lim k f k ∞ →。 (1))3 1)(21(1)(2+-+=z z z z F (3))2)(1()(2 --=z z z z F . 下载可编辑 . 6.10 求下列象函数的双边逆z 变换。 (1)31 ,)31)(21(1)(2<--+= z z z z z F (2)21 ,)3 1)(21()(2>--= z z z z z F (3)2 1,) 1()2 1 ()(23 < --= z z z z z F . 下载可编辑 . (4)2131,)1()2 1()(23 <<--= z z z z z F 第五、六章自测题标准答案 1. 判断题 (1) 当且仅当一个连续时间线性时不变系统的阶跃响应是绝对可积的,则该系统是稳定的。 ( × ) (2) 若h (t )是一个线性时不变系统的单位冲激响应,并且h(t)是周期的且非零,则系统是非稳定的。 ( √ ) (3) 对于一个因果稳定的系统,可以利用ωωj s s H j H ==|)()( 求系统的频率响应。 ( √ ) (4) 一个稳定的连续时间系统,其系统函数的零极点都必定在s 平面的左半平面。 ( × ) 2.填空题 (1)某二阶系统起始状态为2_)0(',1_)0(=-=r r ;初始条件为,1)0(',3)0(==++r r 则确定零输入响应待定系数的初始条件为)0(+zi r = -1 ,)0('+zi r = 2 ;而确定零状态响应待定系数的初始条件为 )0(+zs r = 4 ,)0('+zs r = -1 。 (2)2 3)(2++=-s s e s F s 的逆变换为 )(][ )1(2)1(t e e t t ε-----。 (3))()sin( )(t t t f εφα+=的拉普拉斯变换为2 22 2sin cos )(αφαα φ+? ++?=s s s s F 。 3.求图5-1中所示单边周期信号的拉氏变换。 图5-1 解: +---+- -=)2 3()()2()()(T t T t T t t t f εεεε 4.一个单位冲激响应为h (t )的因果LTI 系统有下列性质: (1)当系统的输入为t e t x 2)(=时,对所有t 值,输出t e t y 26 1)(= 。 (2)单位冲激响应h(t)满足微分方程 )()()(2) (4t b t e t h dt t dh t εε+=+-。这里b 为一个未知常数。 确定该系统的系统函数。 解:本题中用到了特征函数的概念。一个信号,若系统对该信号的响应仅是一个常数(可能是复数)乘以输入,则该信号为系统的特征函数。(请注意:上面所指的系统必须是线性时不变系统。) 因为t e t x 2)(=是因果LTI 系统的特征函数,所以t t s e e s H t y 2226 1|)()(= ?==。即 信号与系统期末考试试题 一、选择题(共10题,每题3分 ,共30分,每题给出四个答案,其中只有一个正确的) 1、 卷积f 1(k+5)*f 2(k-3) 等于 。 (A )f 1(k)*f 2(k) (B )f 1(k)*f 2(k-8)(C )f 1(k)*f 2(k+8)(D )f 1(k+3)*f 2(k-3) 2、 积分 dt t t ? ∞ ∞ --+)21()2(δ等于 。 (A )1.25(B )2.5(C )3(D )5 3、 序列f(k)=-u(-k)的z 变换等于 。 (A ) 1-z z (B )-1-z z (C )11-z (D )1 1--z 4、 若y(t)=f(t)*h(t),则f(2t)*h(2t)等于 。 (A ) )2(41t y (B ))2(21t y (C ))4(41t y (D ))4(2 1 t y 5、 已知一个线性时不变系统的阶跃相应g(t)=2e -2t u(t)+)(t δ,当输入f(t)=3e —t u(t)时,系 统的零状态响应y f (t)等于 (A )(-9e -t +12e -2t )u(t) (B )(3-9e -t +12e -2t )u(t) (C ))(t δ+(-6e -t +8e -2t )u(t) (D )3)(t δ +(-9e -t +12e -2t )u(t) 6、 连续周期信号的频谱具有 (A ) 连续性、周期性 (B )连续性、收敛性 (C )离散性、周期性 (D )离散性、收敛性 7、 周期序列2)455.1(0 +k COS π的 周期N 等于 (A ) 1(B )2(C )3(D )4 8、序列和 ()∑∞ -∞ =-k k 1δ等于 (A )1 (B) ∞ (C) ()1-k u (D) ()1-k ku 9、单边拉普拉斯变换()s e s s s F 22 12-+= 的愿函数等于 ()()t tu A ()()2-t tu B ()()()t u t C 2- ()()()22--t u t D 10、信号()()23-=-t u te t f t 的单边拉氏变换()s F 等于 ()A ()()()232372+++-s e s s ()() 2 23+-s e B s 综合测试(三) 一、选择题(本题共6小题,每小题3分,共18分) 1、若想使连续时间信号在通过线性非时变系统传输时,波形不会产生失真,而仅仅是延时一段时间输出,则要求系统的单位冲激响应必须满足() A. B. C. D. 2、序列和等于() A. 1 B. C. D. 3、连续时间信号的单边拉普拉斯变换为() A. B. C. D. 4、下列各式中正确的是() A. B. C.D. 5、单边Z变换对应的原时间序列为() A.B. C.D. 6.请指出是下面哪一种运算的结果?() A . 左移6 B. 右移6 C . 左移2 D. 右移2 三、描述某系统的微分方程为 y ”(t) + 4y ’(t) + 3y(t) = f(t) 求当f(t) = 2e -2t ,t ≥0;y(0)=2,y ’(0)= -1时的解;( 15分) 解: (1) 特征方程为λ2 + 4λ+ 3 = 0 其特征根λ1= –1,λ2= –2。齐次解为 y h (t) = C 1e -t + C 2e -3t 当f(t) = 2e –2 t 时,其特解可设为 y p (t) = Pe -2t 将其代入微分方程得 P*4*e -2t + 4(–2 Pe -2t ) + 3Pe -t = 2e -2t 解得 P=2 于是特解为 y p (t) =2e -t 全解为: y(t) = y h (t) + y p (t) = C 1e -t + C 2e -3t + 2e -2t 其中 待定常数C 1,C 2由初始条件确定。 y(0) = C 1+C 2+ 2 = 2, y ’(0) = –2C 1 –3C 2 –1= –1 解得 C 1 = 1.5 ,C 2 = –1.5 最后得全解 y(t) = 1.5e – t – 1.5e – 3t +2 e –2 t , t ≥0 三、描述某系统的微分方程为 y ”(t) + 5y ’(t) + 6y(t) = f(t) 求当f(t) = 2e -t ,t ≥0;y(0)=2,y ’(0)= -1时的解;( 15分) 解: (1) 特征方程为λ2 + 5λ+ 6 = 0 其特征根λ1= –2,λ2= –3。齐次解为 y h (t) = C 1e -2t + C 2e -3t 当f(t) = 2e – t 时,其特解可设为 y p (t) = Pe -t 将其代入微分方程得 Pe -t + 5(– Pe -t ) + 6Pe -t = 2e -t 解得 P=1 于是特解为 y p (t) = e -t 全解为: y(t) = y h (t) + y p (t) = C 1e -2t + C 2e -3t + e -t 其中 待定常数C 1,C 2由初始条件确定。 y(0) = C 1+C 2+ 1 = 2, y ’(0) = –2C 1 –3C 2 –1= –1 解得 C 1 = 3 ,C 2 = – 2 最后得全解 y(t) = 3e – 2t – 2e – 3t + e – t , t ≥0 四、如图信号f(t)的拉氏变换F(s) = ,试观 )e e 1(e 2s s s s s -----)e e 1(e 2 s s s s s ----- 信号与线性系统题解 阎鸿森 第二章 习题答案 2.1 (1) 已知连续时间信号()x t 如图P2.1(a)所示。试画出下列各信号的波形图,并加以标 注。 (a) (2)x t - (b) (1)x t - (c) (22)x t + (2) 根据图P2.1(b)所示的信号()h t ,试画出下列各信号的波形图,并加以标注。 (a) (3)h t + (b) (2)2 t h - (c) (12)h t - (3) 根据图P2.1(a)和(b)所示的()x t 和()h t ,画出下列各信号的波形图,并加以标注。 (a) ()()x t h t - (b) (1)(1)x t h t -- (c) (2)(4)2 t x h t -+ 图P2.1 解:(1) 各信号波形如下图所示: (a) (b)(c) 1 2 (2)x t -(1)x t -(22)x t +t t t 22 22111 11210 01 -1-1 -2 -2 -3 5 (2) 各信号波形如下图所示: (a) (b)(c) 12 12 -32 (3)h t +(2)2t h -(12) h t -t t t 00 1 1 1 12468 1-2-3-4-5- (3) 各信号波形如下图所示: ()()x t h t -(1)(1)x t h t --(2)2 t x -(a) (b) (c) t t t ∴(2/2)(4)0 x t h t -+=00 111112 2222 2 1-1-4 6 2 - 2.2 已知信号(52)x t -的波形图如图P2.2所示,试画出()x t 的波形图,并加以标注。 (52) x t -t 3252 1123 图P2.2 解:波形如下图所示: 重庆大学信号与线性系统期末考试试题 一、填空题:(30分,每小题3分) 1. =-? ∞ ∞ -dt t t )()5cos 2(δ 。 2. ()dt t e t 12-?+∞ ∞ --δ= 。 3. 已知 f (t )的傅里叶变换为F (j ω), 则f (2t -3)的傅里叶变换为 。 4. 已知 6 51 )(2 +++= s s s s F ,则=+)0(f ; =∞)(f 。 5. 已知 ω ωπδεj t FT 1 )()]([+=,则=)]([t t FT ε 。 6. 已知周期信号 )4sin()2cos()(t t t f +=,其基波频率为 rad/s ; 周期为 s 。 7. 已知 )5(2)2(3)(-+-=n n k f δδ,其Z 变换 =)(Z F ;收敛域为 。 8. 已知连续系统函数1342 3)(2 3+--+= s s s s s H ,试判断系统的稳定性: 。 9.已知离散系统函数1.07.02 )(2+-+=z z z z H ,试判断系统的稳定性: 。 10.如图所示是离散系统的Z 域框图,该系统的系统函数H(z)= 。 二.(15分)如下方程和非零起始条件表示的连续时间因果LTI 系统, ?????==+=++-- 5 )0(',2)0() (52)(4522y y t f dt df t y dt dy dt y d 已知输入 )()(2t e t f t ε-=时,试用拉普拉斯变换的方法求系统的零状态响应 )(t y zs 和零输入响应)(t y zi ,0≥t 以及系统的全响应),(t y 0≥t 。 三.(14分) ① 已知2 36 62)(22++++=s s s s s F ,2]Re[->s ,试求其拉氏逆变换f (t ); ② 已知) 2(2 35)(2>+-=z z z z z X ,试求其逆Z 变换)(n x 。 四 (10分)计算下列卷积: 1. }1,0,6,4,3{}4,1,2,1{)()(21--*=*k f k f ; 2. )(3)(23t e t e t t εε--* 。 2006-2007学年第二学期《信号与线性系统》(课内)试卷A 卷 一、计算题(共45分) 1.(5分)计算积分dt t t t )6 ()sin (π δ- +?+∞ ∞-的值。 2.(5分)绘出函数)1()]1()([-+--t u t u t u t 的波形图。 3.(6分)已知)2()()(),1()()(21--=--=t u t u t f t u t u t f ,求卷积)()(21t f t f *。 4.(6分)若)(t f 的傅里叶变换已知,记为)(ωF ,求)1()1(t f t --对应的傅里叶变换。 5.(6分)如下图所示信号,已知其傅里叶变换,记为)(ωF , 求: (1))0(F ; (2)?+∞ ∞ -ωωd F )(。 6.(5分)已知)(t f 对应的拉氏变换为)(s F ,求)/(/a t f e a t -(0>a )对应的拉氏变换。 7.(6分) 已知)(t f 对应的拉氏变换2 3)(2 +-=-s s e s F s ,求)(t f 8.(6分)线性时不变系统的单位样值响应为)(n h ,输入为)(n x ,且有 )4()()()(--==n u n u n x n h ,求输出)(n y ,并绘图示出)(n y 。 二、综合题(共计55分) 1、(10分)系统如图所示,已知t t x 2000cos )(=,t t t f 2000cos 100cos )(=,理想低通滤波器)300()300()(--+=ωωωu u H ,求滤波器的响应信号)(t y 。 x(t) y(t) f(t) 第六章习题答案 1. 用定义计算下列信号的拉氏变换及其收敛域,并画出零极点图和收敛域。 (a) (),0at e u t a > (b) (),0at te u t a > (c) (),0at e u t a --> (d) [cos()]()c t u t Ω- (e) [cos()]()c t u t Ω+θ- (f) [sin()](),0at c e t u t a -Ω> (g) (),b at b a δ-和为实数 (h) 23,0 (),0 t t e t x t e t -?>?=?-,见图(a) (b) 2 1 ,Re{}() s a s a >-, 见图(a) (c) 1 ,Re{}s a s a -<-+,见图(b) (d) 22 ,Re{}c s s a s - <-+Ω, 见图(c) (e) 22 cos sin ,Re{}0c c s s s θθ -Ω>+Ω,见图(d) (f) 22 ,Re{}()c c s a a s Ω>-++Ω,见图(e) (g) 2 1|| sb a e a - ,整个s 平面 (h) 11,2Re{}332s s s +-<<-+,见图(f) (a) (b) (c) (d) (e) (f) 2. 用定义计算图P6.2所示各信号的拉氏变换式。 (a) (b) (c) (d) (e) (f) 解: (a) (b) (c) 20111(1)T st sT sT te dt e e T s Ts ---=-+-? (d) (e) 2222221212()(1)[(1)]sT sT sT s X s e e e e s Ts s Ts ----=-+-+-- (f) s 222sin 111sin [()()]111 st sT st s te dt e t u t u t e dt e s s s π --+∞ --π -∞-=--π=-?=+++? ? 3. 对图P6.3所示的每一个零极点图,确定满足下述情况的收敛域。 (a) x(t)的傅立叶变换存在。 (b) 2()t x t e 的傅立叶变换存在 (c) ()0,0x t t => (d) ()0,5x t t =< 解:(a) x(t)的傅立叶变换存在,则j s =Ω应在()X s 的收敛域内 图(a) 1Re{}1s -<< 图(b) 3Re{}3s -<< 图(c) Re{}1s >- (b) 2()t x t e 的傅立叶变换存在,则s =-2轴一定在()x s 的收敛域内 图(a), Re{}1s <- 图(b), 3Re{}3s -<< 图(c), 3Re{}1s -<<- (c) x(t)=0,t>0,则x(t)为左边信号 图(a),Re{}1s <- 图(b),Re{}3s <- 图(c), Re{}3s <- (d) x(t)=0, t<5,则x(t)为右边信号 X 第二章 连续系统的时域分析习题解答 2-1 图题2-1所示各电路中,激励为f (t ),响应为i 0(t )和u 0(t )。试列写各响应关于激励微分算子方程。 解: . 1)p ( ; )1(1)p ( , 111 , 1 111)( )b (; 105.7)625(3 102 ; )(375)()6253(4) ()()61002.041( )a (0202200 204006000f i p f p u p f p p p u i f p p p p p f t u pf i p pu i t f t u p t f t u p =+++=++?++=+=+++= ++= ?=+??==+?=++-- 2-2 求图题2-1各电路中响应i 0(t )和u 0(t )对激励f (t )的传输算子H (p )。 解:. 1 )()()( ; 11)()()( )b (; 625 3105.7)()()( ; 6253375)()()( )a (22 0 20 40 0 +++==+++== +?==+== -p p p p t f t i p H p p p t f t u p H p p t f t i p H p t f t u p H f i f u f i f u 2-3 给定如下传输算子H (p ),试写出它们对应的微分方程。 . ) 2)(1() 3()( )4( ; 323)( )3(; 3 3)( )2( ; 3)( )1( +++=++=++=+= p p p p p H p p p H p p p H p p p H 解:; 3d d 3d d )2( ; d d 3d d )1( f t f y t y t f y t y +=+=+ . d d 3d d 2d d 3d d )4( ; 3d d 3d d 2 )3( 2222t f t f y t y t y f t f y t y +=+++=+ 2-4 已知连续系统的输入输出算子方程及0– 初始条件为: . 4)(0y ,0)(0y )y(0 ),()2(1 3)( )3(; 0)(0y ,1)(0y ,0)y(0 ),()84() 12()( )2(; 1)(0y ,2)y(0 ),()3)(1(4 2)( )1(---2 ---2 --=''='=++==''='=+++-=='=+++= t f p p p t y t f p p p p t y t f p p p t y f (u 0(t ) (b) u 0(t ) (a) 图题2-1 专业课习题解析课程 第1讲 第一章信号与系统(一) 专业课习题解析课程 第2讲 第一章 信号与系统(二) 1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5)) t f= r ) (sin (t (7)) f kε = t ) ( 2 (k (10))(])1(1[)(k k f k ε-+= 1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f (5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11) )]7()()[6 sin( )(--=k k k k f εεπ (12))]()3([2)(k k k f k ---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2) )2()1(2)()(-+--=t r t r t r t f 课程名称 信号与线性系统A 考试学期 08-07 得分 适用专业 微电、物理、 考试形式 闭卷 考试时间 120分钟 姓名 班级 学号 一、选择题(每小题可能有一个或几个正确答案,将正确的题号填入[ ]内) 1.f (5-2t )是如下运算的结果————————( C ) (A )f (-2t )右移5 (B )f (-2t )左移5 (C )f (-2t )右移 2 5 (D )f (-2t )左移25 2.已知)()(),()(21t u e t f t u t f at -==,可以求得=)(*)(21t f t f —————( C ) (A )1-at e - (B )at e - (C ))1(1at e a -- (D )at e a -1 3.线性系统响应满足以下规律————————————(AD ) (A )若起始状态为零,则零输入响应为零。 (B )若起始状态为零,则零状态响应为零。 (C )若系统的零状态响应为零,则强迫响应也为零。 (D )若激励信号为零,零输入响应就是自由响应。 4.若对f (t )进行理想取样,其奈奎斯特取样频率为f s ,则对)23 1 (-t f 进行取 样,其奈奎斯特取样频率为————————(B ) (A )3f s (B ) s f 31 (C )3(f s -2) (D ))2(3 1 -s f 5.理想不失真传输系统的传输函数H (jω)是 ————————(B ) (A )0j t Ke ω- (B )0 t j Ke ω- (C )0 t j Ke ω-[]()()c c u u ωωωω+-- (D )00 j t Ke ω- (00,,,c t k ωω为常数) 6.已知Z 变换Z 1 311 )]([--= z n x ,收敛域3z >,则逆变换x (n )为——( A ) (A ))(3n u n (C )3(1)n u n - (B ))(3n u n -- (D ))1(3----n u n 第一章 信号与系统(二) 1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)( (3)) ()sin()(t t t f επ= ( 4))(sin )(t t f ε= (5)) t f= r ) (sin (t (7)) f kε = t ) ( 2 (k (10))(])1(1[)(k k f k ε-+= 1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2) )2()1(2)()(-+--=t r t r t r t f (5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11))]7()()[6 sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k ---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f (5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε 2012-2013学年第二学期《信号与线性系统》(课内)试卷A 卷 一、计算题(共45分) 1.(5分)计算积分dt t t t )6 ()sin (π δ- +? +∞ ∞ -的值。 2.(5分)绘出函数)1()]1()([-+--t u t u t u t 的波形图。 3.(6分)已知)2()()(),1()()(21--=--=t u t u t f t u t u t f ,求卷积)()(21t f t f *。 4.(6分)若)(t f 的傅里叶变换已知,记为)(ωF ,求)1()1(t f t --对应的傅里叶变换。 5.(6分)如下图所示信号,已知其傅里叶变换,记为)(ωF , 求: (1))0(F ; (2)? +∞ ∞ -ωωd F )(。 6.(5分)已知)(t f 对应的拉氏变换为)(s F ,求)/(/a t f e a t -(0>a )对应的拉氏变换。 7.(6分) 已知)(t f 对应的拉氏变换2 3)(2+-=-s s e s F s ,求)(t f 8.(6分)线性时不变系统的单位样值响应为)(n h ,输入为)(n x ,且有 )4()()()(--==n u n u n x n h ,求输出)(n y ,并绘图示出)(n y 。 二、综合题(共计55分) 1、(10分)系统如图所示,已知t t x 2000 cos )(=,t t t f 2000cos 100cos )(=,理想低通滤波器)300()300()(--+=ωωωu u H ,求滤波器的响应信号)(t y 。 y(t) f(t) 第一章 信号与系统(二) 1-1画出下列各信号的波形【式中)() (t t t r ε=】为斜升函数。 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2) )2()1(2)()(-+--=t r t r t r t f (5) )2()2()(t t r t f -=ε (8) )]5()([)(--=k k k k f εε (11))]7()()[6 sin( )(--=k k k k f εεπ (12))]()3([2)(k k k f k ---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f (5) )2()2()(t t r t f -=ε (8) )]5()([)(--=k k k k f εε (11))]7()()[6sin()(--=k k k k f εεπ (12) )]()3([2)(k k k f k ---=εε 1-3 写出图1-3所示各波形的表达式。 1-4 写出图1-4所示各序列的闭合形式表达式。 1-5 判别下列各序列是否为周期性的。如果是,确定其周期。 (2))6 3cos()443cos()(2 π πππ+++=k k k f (5))sin(2cos 3)(5t t t f π+= 解: 1-6 已知信号 )(t f 的波形如图1-5所示,画出下列各函数的波形。 (1))()1(t t f ε- (2))1()1(--t t f ε (5))21(t f - (6) )25.0(-t f (7)dt t df ) ( (8)dx x f t ?∞-)( 解:各信号波形为 (1))()1(t t f ε- (2))1()1(--t t f ε (5))21(t f - (6) )25.0(-t f (7)dt t df )( 6.4根据下列象函数及所标注的收敛域,求其所对应的原序列。 (1)F(z) 1,全z平面 (2)F(z) z3,z (3)F(z) z 1,z 0 (4)F(z) 2z 1 z2,0 z 1 (5)F(z) a 1 (6) F(z) 一, z |a 1 az 解⑴冲I F(z) =1 可1知 fib、— 1 M — H 0 即得f(k)==肌切(2)由F(iri =它和I盘:< X可知 f(k)=.1 *k ――3 即潯/( k) = S 6.5已知(k) 1,a k (k) ,k (k) 2,试利用z变换的性质求下列序 z a (z 1) 列的z 变换并注明收敛域。 (9) (1)k cos(k-) (k) 解 (1) + (— 一 / ~ — p —打 收敛域为辽>1 (3) f (k ) = (- 1)绩£(为) T (一 1)1 煙(小一 -_T 其收敛域为I >1 ⑸ JXk) = k(k- l)e(k- 1) = $魏一 1)£(方) 收敛域为丨琴丨> 1 <7) f (k ) — k_^(k ) 一匹(良 一 4)] =fe :(一 (k 一 4)疋(向 一 4) 一 4亡(冷 一 4) _ x 4 — iz — 3 z a (J ? — 1 )£ 收敛域为c >1 (1)2口 ( 1)k ] (k) (3) ( 1)k (k) (5) k(k 1) (k 1) (7) k[ (k) (k 4)] 信号与线性系统课后答案 第一章 信号与系统(一) 1-1画出下列各信号的波形【式中)() (t t t r ε=】为斜升函数。 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4)) fε t = (sin ) (t (5)) t r f= (sin ) (t (7)) t (k f kε = ) ( 2 (10)) f kε k - = (k + ( ] )1 ( 1[ ) 1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f (5) )2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11))]7()()[6 sin()(--=k k k k f εεπ (12) )]()3([2)(k k k f k ---=εε 解:各信号波形为 (1) )2()1(3)1(2)(-+--+=t t t t f εεε (2) )2 ( )1 ( 2 )( )(- + - - =t r t r t r t f (5) ) 2( ) 2( )(t t r t f- =ε 信号与线性系统分析-(吴大正-第四版)第六章习题答案 6.4 根据下列象函数及所标注的收敛域,求其所对应的原序列。 (1)1)(=z F ,全z 平面 (2)∞<=z z z F ,)(3 (3)0 ,)(1 >=-z z z F (4)∞ <<-+=-z z z z F 0,12)(2 (5)a z az z F >-=-,11 )(1 (6)a z az z F <-=-,11 )(1 6.5 已知1)(?k δ,a z z k a k -?)(ε,2 )1()(-?z z k k ε,试利用z 变换的性质求下列序列的z 变换并注明收敛域。 (1))(])1(1[2 1k k ε-+ (3))()1(k k k ε- (5))1()1(--k k k ε (7))]4()([--k k k εε (9)) ()2 cos() 2 1(k k k επ 6.8 若因果序列的z 变换)(z F 如下,能否应用终值定理?如果能,求出)(lim k f k ∞ →。 (1) ) 3 1 )(21(1 )(2+-+= z z z z F (3) ) 2)(1()(2 --= z z z z F 6.10 求下列象函数的双边逆z 变换。 (1)31 ,)31)(21(1)(2< -- +=z z z z z F (2) 21 ,)3 1)(21()(2> --=z z z z z F (3)2 1,) 1()2 1 ()(23 < --=z z z z z F (4)2131,)1()2 1()(23 < <--= z z z z z F 重庆大学信号与系统期末考试试题-及答案 重庆大学信号与线性系统期末考试试题 一、填空题:(30分,每小题3分) 1. =-?∞ ∞-dt t t )()5cos 2(δ 。 2. ()dt t e t 12-?+∞ ∞--δ= 。 3. 已知 f (t )的傅里叶变换为F (j ω), 则f (2t -3)的傅里叶变换为 。 4. 已知 6 51)(2+++=s s s s F ,则=+)0(f ; =∞)(f 。 5. 已知 ωωπδεj t FT 1)()]([+ =,则=)]([t t FT ε 。 6. 已知周期信号)4sin()2cos()(t t t f +=,其基波频率为 rad/s ; 周期为 s 。 7. 已知)5(2)2(3)(-+-=n n k f δδ,其Z 变换 =)(Z F ;收敛域为 。 8. 已知连续系统函数1 3423)(23+--+= s s s s s H ,试判断系统的稳定性: 。 9.已知离散系统函数1.07.02)(2+-+=z z z z H ,试判断系统的稳定性: 。 10.如图所示是离散系统的Z 域框图,该系统的系统函数H(z)= 。 二.(15分)如下方程和非零起始条件表示的连续时间因果LTI 系统, 五.(16分)已知系统的差分方程和初始条件为: )()2(2)1(3)(n n y n y n y ε=-+-+,5.0)2(,0)1(=-=-y y 1. 求系统的全响应y (n ); 2. 求系统函数H (z ),并画出其模拟框图; 六.(15分)如图所示图(a )的系统,带通滤波器的频率响应如图(b)所示,其 相位特性0)(=ω?,若输入信号为: )1000cos()(,2)2sin()(t t s t t t f ==π 试求其输出信号y(t),并画出y(t)的频谱图。 答案 一填空题(30分,每小题3分) 信号 单项选择题。 1. 已知序列3()cos( )5 f k k π =为周期序列,其周期为 ( C ) A . 2 B. 5 C. 10 D. 12 2. 题2图所示()f t 的数学表达式为 ( B ) 图题2 A .()10sin()[()(1)]f t t t t πεε=+- B. ()10sin()[()(1)]f t t t t πεε=-- C. ()10sin()[()(2)]f t t t t πεε=-- D. ()10sin()[()(2)]f t t t t πεε=+- 3.已知sin() ()()t f t t dt t πδ∞ -∞= ?,其值是 ( A ) A .π B. 2π C. 3π D. 4π 4.冲激函数()t δ的拉普拉斯变换为 ( A ) A . 1 B. 2 C. 3 D. 4 5.为了使信号无失真传输,系统的频率响应函数应为 ( D ) A . ()d jwt H jw e = B. ()d jwt H jw e -= C. ()d jwt H jw Ke = D. ()d jwt H jw Ke -= 6.已知序列1()()()3 k f k k ε=,其z 变换为 ( B ) A . 13 z z + B. 13 z z - C. 14 z z + D. 14 z z - 7.离散因果系统的充分必要条件是 ( A ) A .0,0)(<=k k h B. 0,0)(>=k k h C. 0,0)(< 《信号与线性系统》课程教学大纲 课程编号:28121008 课程类别:学科基础课程 授课对象:信息工程、电子信息工程、通信工程等专业 指定教材:管致中,《信号与线性系统》(第4版),高等教育出版社,2004年 教学目的: 《信号与线性系统》课程讨论确定信号经过线性时不变系统传输与处理的基本理论和基本分析方法。掌握连续时间信号分析,连续时间系统的时域、频域、复频域的分析方法,通过连续时间系统的系统函数,描述系统的频率特性及对系统稳定性的判定;连续时间信号转换到离散时间信号的采样理论及转换不失真的条件。 第一章绪论 课时:1周,共4课时 第一节引言 信号的概念 系统的概念 思考题: 1、什么是信号?举例说明。 2、什么是系统?举例说明。 第二节信号的概念 信号的分类 周期信号与非周期信号、连续时间信号与离散时间信号、能量信号与功率信号。 二、典型信号 指数信号、复指数信号、三角信号、抽样信号。 思考题: 1、复合信号的周期是如何判定的?若复合信号是周期信号,其周期如何计算? 2、如何判定一个信号是能量信号还是功率信号,或者两者都不是? 第三节信号的简单处理 信号的运算 信号的相加、相乘、时移、尺度变换等。 二、信号的分解 一个信号可以分解成奇分量与偶分量之和。 思考题: 若信号由转换至,说明转换的分步次序。 若信号由转换至,说明转换的分步次序。 3、说明信号的奇偶分解的方法。 第四节系统的概念 一、系统的分类 线性系统和非线性系统、时不变系统和时变系统、连续时间系统和离散时间系统、因果系统和非因果系统。 二、系统的性质 线性:满足齐次性与叠加性 时不变:系统的性质不随时间而改变 思考题: 1、举例说明时不变系统和时变系统。 2、若一个系统是线性的,系统的零输入响应与零状态响应具有什么特性?第五节线性非时变系统的分析 线性时不变系统的重要特性 微分特性、积分特性、频率保持特性。 思考题: 若要分析线性时不变系统的特性,说明分析的步骤。 第二章连续时间系统的时域分析 引言 一、线性连续时间系统的时域分析方法 二、线性连续时间系统的输出数学模型------输入输出方程(微分方程)思考题: 对一个RC电路模型,给出输入输出方程(微分方程)。 对一个RLC电路模型,给出输入输出方程(微分方程)。 系统方程的算子表示方法 一、算子的基本规则 二、转移算子 思考题: 对一个RC电路模型,给出输入输出方程(微分方程),并求其转移算子。对一个RLC电路模型,给出输入输出方程(微分方程),并求其转移算子。系统的零输入响应 零输入响应的概念 二、零输入响应的计算方法 1、当分解为单次根: 其中由及其各阶导数决定;为系统的自然频率。 2、当分解为n次重根: 其中由及其各阶导数决定。 思考题: 1、当分解为单次根或n次重根时,说明系统的零输入响应的求解方法。 2、零输入响应的特性是什么? 奇异函数 单位阶跃函数 二、单位冲激函数 门函数 符号函数 斜变函数信号与线性系统分析_(吴大正_第四版)习题答案第六章
信号与线性系统五六章自测题(标准答案)
信号与系统期末考试试题(有答案的)
《信号与线性系统》试题与答案5
信号与线性系统题解 阎鸿森 第二章
信号与系统期末考试试题
《信号与线性系统》期末试卷
信号与线性系统习题答案西安交大版阎鸿森编-10页精选文档
南航金城信号与线性系统课后答案 第二章 连续系统的时域分析习题解答
信号与线性系统分析_(吴大正_第四版)第一章习题答案
信号与系统期末试题与答案
信号与线性系统分析习题答案-(吴大正-第四版--高等教育出版社)
《信号与线性系统》期末试卷要点
信号与线性系统分析习题答案吴大正_第四版__高等教育出版社
信号与线性系统分析-(吴大正-第四版)第六章习题答案
信号与线性系统分析报告习题问题详解
信号与线性系统分析-(吴大正-第四版)第六章习题答案
重庆大学信号与系统期末考试试题-及答案
信号与线性系统分析复习题及答案
信号与线性系统