基于MATLAB三相异步电动机调压调速系统设计说明书
电气工程及其自动化专业方向课程设计
一、设计任务
1、了解并熟悉双闭环三相异步电机调压调速原理及组成。
2、学习 SIMULINK,熟悉相关的模块功能。
3、进一步理解交流调压系统中电流环和转速环的作用。
二、设计要求
1、利用SIMULINK建立闭环调速系统仿真模型。
2、调试完成调压模块仿真、开环系统仿真、闭环系统仿真。
三、实验设备
1、计算机一台
2、MATLAB仿真软件
四、实验原理
调压调速即通过调节通入异步电动机的三相交流电压大小来调节转子转速的方法。理论依据来自异步电动机的机械特性方程式:
其中,p为电机的极对数;
w1为定子电源角速度;
U1为定子电源相电压;
R2’为折算到定子侧的每相转子电阻;
R1为每相定子电阻;
L11为每相定子漏感;
L12为折算到定子侧的每相转子漏感;
S为转差率。
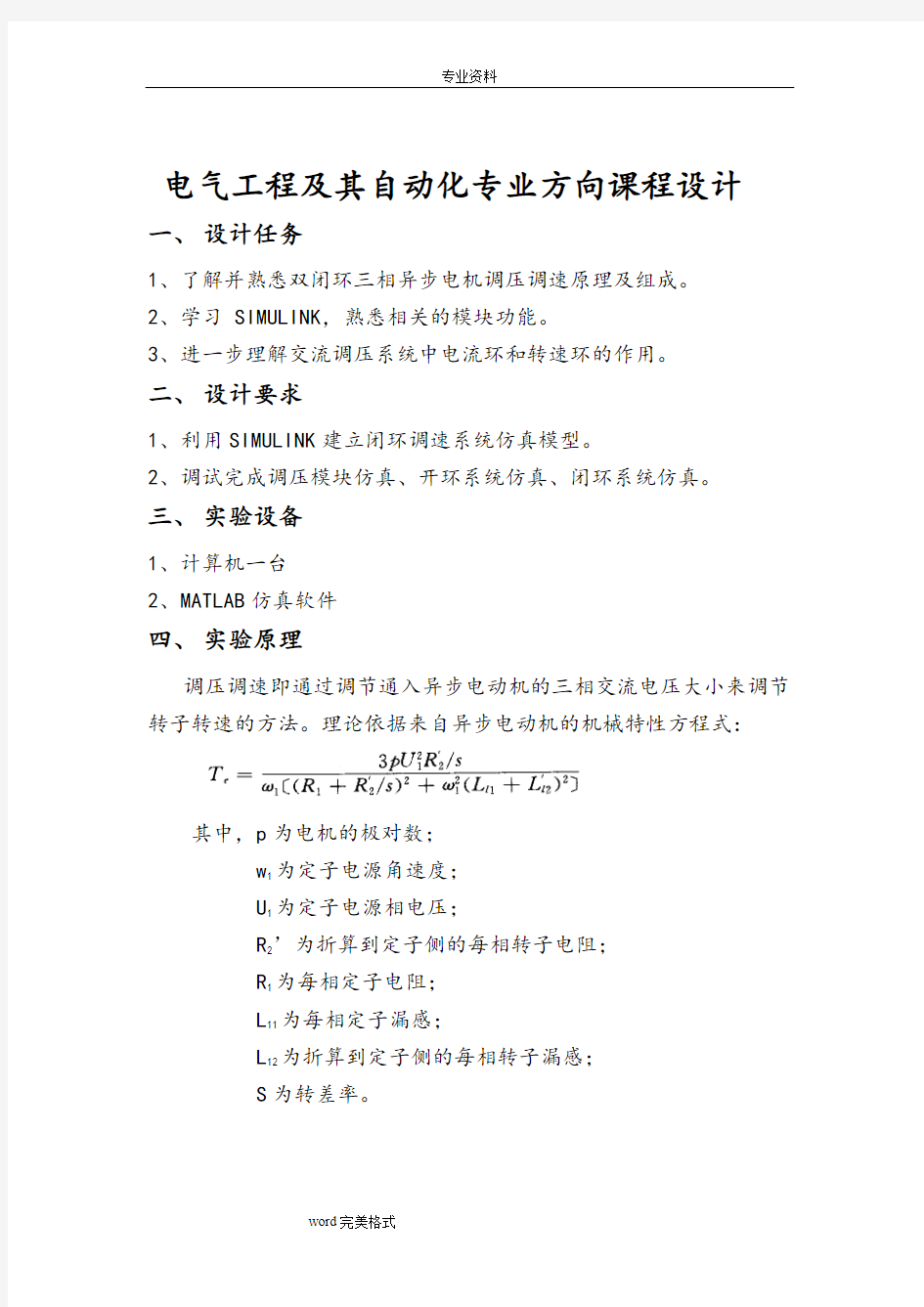
图1 异步电动机在不同电压的机械特性
由电机原理可知,当转差率s 基本保持不变时,电动机的电磁转矩与定子电压的平方成正比。因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的。
1、调压电路
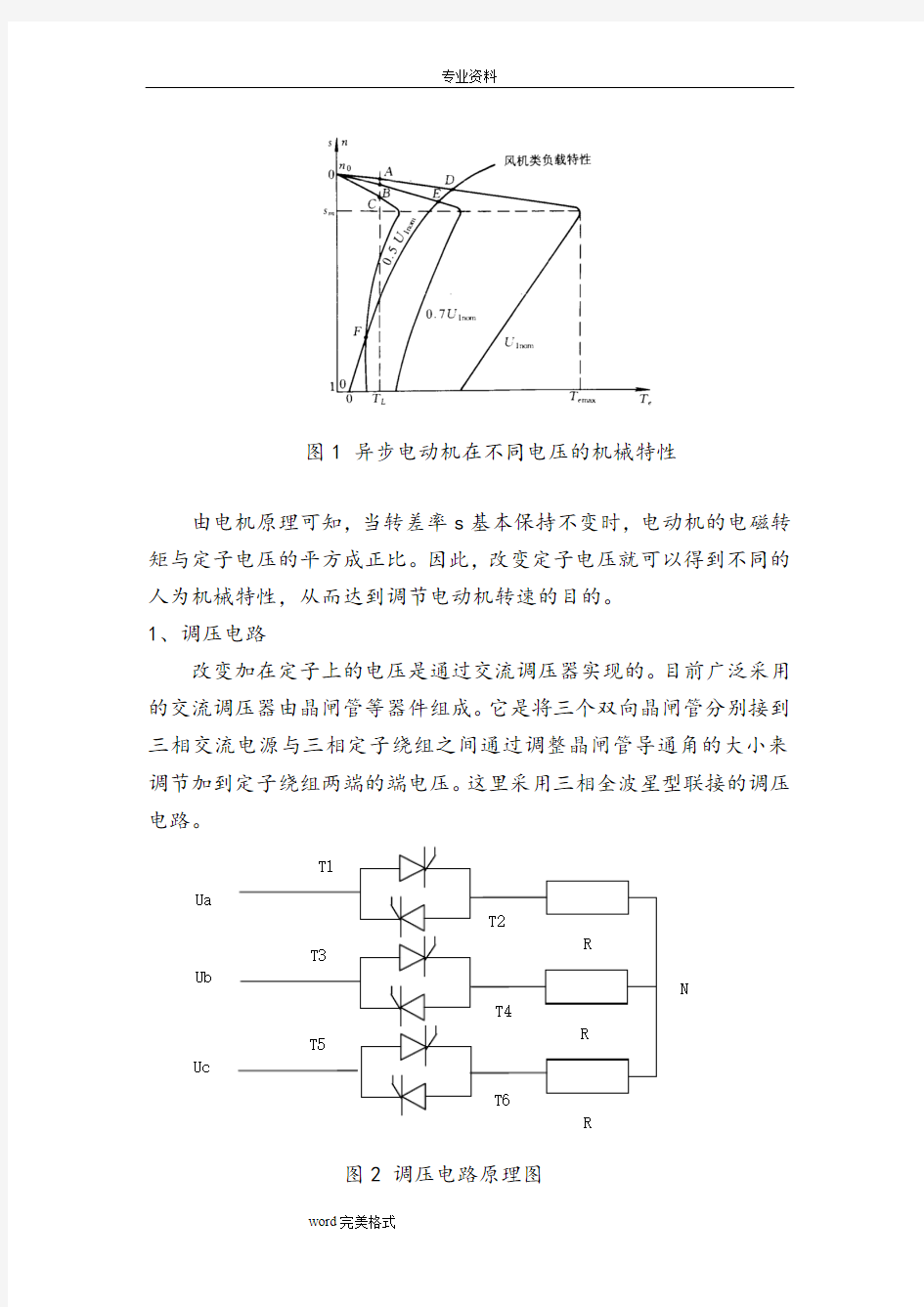
改变加在定子上的电压是通过交流调压器实现的。目前广泛采用的交流调压器由晶闸管等器件组成。它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压。这里采用三相全波星型联接的调压电路。
图2 调压电路原理图 Ua Ub
Uc T2
T3
T5
T4
T6
R R R
N T1
2、开环调压调速
开环系统的主电路由触发电路、调压电路、电机组成。原理图如下:
图3 开环调压系统原理图
AT为触发装置,用于调节控制角的大小来控制晶闸管的导通角,控制晶闸管输出电压来调节加在定子绕组上的电压大小。
3、闭环调压调速
速度负反馈闭环调压调速系统的工作原理:将速度给定值与速度反馈值进行比较,比较后经速度调节器得到控制电压,再将此控制电压输入到触发装置,由触发装置输出来控制晶闸管的导通角,以控制晶闸管输出电压的高低,从而调节了加在定子绕组上的电压的大小。因此,改变了速度给定值就改变了电动机的转速。由于采用了速度负反馈从而实现了平稳、平滑的无级调速。同时当负载发生变化时,通过速度负反馈,能自动调整加在电动机定子绕组上的电压大小。由速度调节器输出的控制电压使晶闸管触发脉冲前移,使调压器的输出电
压提高,导致电动机的输出转矩增大,从而使速度回升,接近给定值。
图4 闭环调速结构图
图5 闭环调速系统原理图
五、 仿真内容
1、调压电路
1)、调压电器的仿真模型
调节器晶闸管调压装置异步电动机转速反馈装置
给定
n
U n U +-ct U 1U n 图5-9 调压调速系统静态结构框图
图6 (a)利用单个晶闸管元器件搭建的三相交流调压器的仿真模型 (b)图的封装模型
2)、调压电路的搭建
图7 调压电路模型
3)、参数的设定
Frequency of synchronization voltages(hz):同步电压频率(赫兹)50Hz
Pulse width(degrees):触发脉冲宽度(角度)10
Double pulsing:双脉冲出发选择。
RLC负载的参数设定:电阻100Ω,电感0H,电容的值为inf
UA:峰值220v,f为50Hz,初相位为0°
UB:峰值220v,f为50Hz,初相位为-120°
UC:峰值220v,f为50Hz,初相位为-240°
4)电阻负载的仿真图形
a) 触发角α为45° b)触发角α为60°
图8 三相交流调压器的输出电压波形
在电阻负载时三相交流调压器的输出电压仿真结果如图8所示。其中图8a为α=45°时调压器输出的波形,图8b所示为α=60°时调压器输出的波形。通过比较a)和b)可以发现,随着触发角的增加,同时有三个晶闸管导通的区间逐步减小,到α>=60°时,任何晶闸管都只有两相晶闸管导通。
2、异步电动机带风机泵类负载开环调压调速模块1)参数设定
由公式Tz=kn2可推出k=Tz/n2
电机参数额电压220v 频率为60Hz 极对数为2对容量为2238VA 同步转速为1800转/分钟
可以计算k=0.000003665
UA:峰值180v,f为60Hz,初相位为0°
UB:峰值180v,f为60Hz,初相位为-120°
UC:峰值180v,f为60Hz,初相位为-240°
图9 开环系统仿真模型
1)触发角α为60°时得到的转速
图10 α=60°时电机转速变化的过程
由图中可以观察到当触发角为60°时,转速稳定在1712转/分钟,转速在0.9s时达到稳定状态。
2)触发角α为75°时得到的转速
图11 α=75°时电机转速变化的过程
由图中可以观察到当触发角为75°时,转速稳定在1660转/分钟,转速在1.6s时达到稳定状态。
分析:
通过比较图10和图11的触发角α为60°和80°时可以发现:随着α的增大,使得输出电压降低,使转速下降,从而达到调速的目的。
3)改变电源电压,电源电压为150v, 触发角α为60°时得到的转速
图12 电源电压为150v α=60°时电机转速变化的过程
由图中可以观察到当触发角为60°时,转速稳定在1660转/分钟,转速在1s时达到稳定状态。
分析:
通过比较图11和图13可以发现,在相同的触发角不同的电源电压下,电源电压的降低会使转速下降。同时也可以得到通过改变电源电压的大小来实现调速的可行性。
3、闭环调压
图13 闭环调压调速系统仿真模型
异步电动机速度负反馈闭环调压调速系统的仿真模型如下所示,将速度给定值(1200)与速度反馈值进行比较,比较后经速度调节器得到控制电压,再将此控制电压输入到触发装置,由触发装置输出来控制晶闸管的导通角,以控制晶闸管输出电压的高低,从而调节了加在定子绕组上电压的大小。因此,改变速度给定值就改变了电机的转速。由于采用了速度负反馈从而实现了平稳平滑的无级调速。同时负载发生变化时,通过速度负反馈,能制动调整加在定子绕组上的电压的大小,由速度调节器输出的控制电压使晶闸管触发脉冲迁移,是调压器的输出电压提高,导致电动机的输出转矩增大,从而使速度回升,接近给定值。
PI设置:比例环4,环0.1,输出限幅[60,-60]。
控制角调节范围0~120.
图14 闭环转速特性
图14是电压为180v,转速给定为1420,从图中可以可以发现转速给定为1420,转速在0.5s时达到稳定状态,转速维持在1420,从中可以得出转速跟随给定变化。
以下是给定1350在1.4S时给60阶跃的转速、控制角、负载转矩。
图14 转速
从图15可以发现转速在0.45s时达到稳定,在0.45s到1.4s时转速
稳定在1350转/分钟,到1.4s时给了一个终值为60的阶跃,可以发现转速跟随给定变化
图15 控制角
从图16可以直观的看到控制角在随着给定的变化而变化,从而实现调速。
图17 转矩
开始时,转速为0,负载转矩为0,反馈因输出限幅为-60,经60偏置使得输入控制角为0,定子绕组电压为电源电压。随着转速的上升,负载转矩增大,反馈在一定范围内依旧为0.经0.6秒后转速稳定在1350,负载转矩、控制角也保持稳定。再过0.8秒,给定增加60,经反馈,减小控制角,增大电压提高转速,负载转矩随之增大,在1.6秒内保持稳定。
六、总结体会
为期两周的专业方向综合性设计实验终于告一段落了,在为期两周的课程设计中,我学到很多东西,有些表面上看起来比较简单的东西,实际做起来的就不像那么简单了,要考虑诸多参数的配合。对于整个系统,因为课题要求是调压调速,所以首先从调压器开始设计,使用利用单个晶闸管元器件搭建的三相交流调压器的仿真模型,再将该模块进行封装。先观察带电阻负载时,调压器输出的波形,通过修改参数终于使得调压器输出的波形与理论相同。接着,异步电动机带风机泵类负载开环调压调速。然后,确定调速系统采用闭环控制,整个系统可以实现转速负反馈调节,使系统的性能大大提高。通过此次设计让我对matlab的simulink模块有了更深的了解,对调压调速的特性也有了更深层次的认识。
七、参考文献
1)机械工业出版社《电力电子和电力拖动控制系统的matlab仿真》洪乃刚
2)机械工业出版社《电力电子技术》王兆安
3)电子工业出版社《matlab电机仿真精华50例》郝世勇