帆板控制系统毕业设计论文
毕业设计(论文)任务书电子信息工程系12 届应用电子技术专业
毕业设计(论文)任务书
毕业设计(论文)题目帆板控制系统
课题内容性质理论研究
课题来源性质教师收集的结合
生产实际的课题
论文
校内(外)指
导教师职
称
工作单位及部门联系方式
蔺鹏副教
授
电子信息工程系
Linp210@yahoo.c
https://www.360docs.net/doc/d915641536.html,
一、题目说明(目的和意义):
本系统仿真帆板控制系统。能够手动控制风扇吹动风帆达到要求角度并能实时显示角度;通过预先设定角度控制风扇吹动风帆达到要求角度并能实时显示角度;对风帆达到某个角度后具有声光报警功能。通过本题目的研究和设计,使学生能够对单片机应用系统的设计方法包括总体方案论证,系统硬件设计和系统软件设计有一个整体的认识。
一、任务
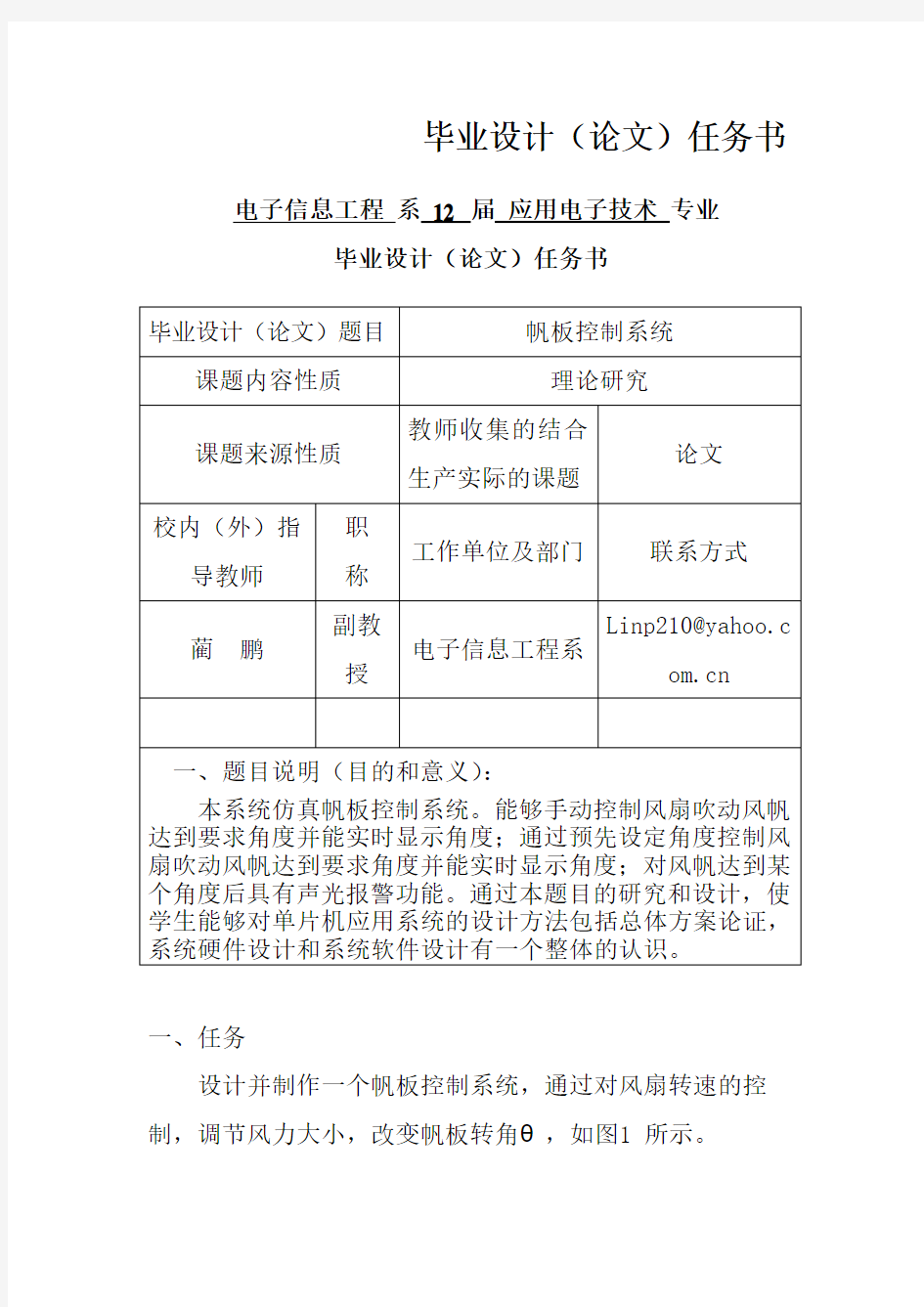
设计并制作一个帆板控制系统,通过对风扇转速的控制,调节风力大小,改变帆板转角θ,如图1 所示。
图1 帆板控制系统示意图
二、要求 1、基本要求
(1)用手转动帆板时,能够数字显示帆板的转角θ。显示范围为0~60°,分辨力为2°,绝对误差≤5°。 (2)当间距d =10cm 时,通过操作键盘控制风力大小,使帆板转角能够在0~60°范围内变化,并要求实时显示θ。矚慫润厲
钐瘗睞枥庑赖。
(3)当间距d =10cm 时,通过操作键盘控制风力大小,使帆板转角θ稳定在45°±5°范围内。要求控制过程在10秒内完成,实时显示θ,并有声光提示,以便进行测试。聞創沟燴鐺險
爱氇谴净。
2、发挥部分
(1)当间距d =10cm 时,通过键盘设定帆板转角,其范围为0~60°。要求θ在5秒内达到设定值,并实时显示θ。最大误差的绝对值不超过5°。残骛楼諍锩瀨濟溆塹籟。
调节装置
键盘
数字显示
角度检测信号
转速控制
风扇
风力
d
θ
(2)间距d 在7~15cm范围内任意选择,通过键盘设定帆板转角,范围为0~60°。要求θ在5秒内达到设定值,并实时显示θ。最大误差的绝对值不超过5°。酽锕极額閉镇桧猪訣锥。(3)其他
摘要
本系统通过调节风扇风速来实现对帆板转角的控制,使帆板的转角能够随风速变化,并且能快速达到设定角度并保持稳定。主要是以STC89C52RC单片机为主控核心,通过键盘设定帆板角度,再由A/D转换器转换数据送至单片机处理后使系统自动达到设定的角度,最后由液晶显示器来显示系统的所有信息。单片机输出PWM脉冲来控制风扇的风速,通过角度传感器测量帆板的旋转角度并反馈至单片机,采用PID控制算法,使系统实现精确控制,然后微调风速的大小使帆板角度达到设定值并稳定。并且在达到设定范围时进行声光报警提示。通过调试,使各项性能指标均达到设计要求,使最终转角绝对值误差不超过5?。彈贸摄尔霁毙攬砖卤庑。
关键字:STC89C52RC;液晶显示;角度传感器; PID算法; A/D转换器
Abstract
The system through the adjustment to achieve the board fan speed control of the angle, make the board of the angle change with the wind speed, and can quickly reach a set Angle and remain stable Main STC89C52 microcontroller as the controller is core the keyboard set the board Angle, and then by the A/D converter conversion of data sent to the SCM processing system after the Angel of automatic reach A set, and finally by LCD monitor to show all of the information system Single chip microcomputer to control PWM pulse output the fan's wind speed, through the measurement of Angle sensor board rotation Angle and feedback to the single chip microcomputer,PID control algorithm, make accurate control system, and the size of the board to fine-tune wind speed to set data and stable Angle. And in reach a set range for sound and light alarm prompt. Through the debugging,make various performance indicators are to meet the design requirements, make the final angle absolute value error is no more than 5 ?.謀荞抟箧飆鐸怼类蒋薔。
Key word: STC89C52RC, Liquid crystal display, Angle sensor, PID algorithm , A/D
converter 厦礴恳蹒骈時盡继價骚。
目录
1.方案论证与选择 ..................... 0茕桢广鳓鯡选块网羈泪。
1.1 系统的基本组成.................. 0鹅娅尽損鹌惨歷茏鴛賴。
1.2 各模块方案论证与选择............ 1籟丛妈羥为贍偾蛏练淨。
1.2.1 主控制器选择及论证......... 1預頌圣鉉儐歲龈讶骅籴。
1.2.2 角度监测方案比较........... 2渗釤呛俨匀谔鱉调硯錦。
1.2.3 风扇控制方案............... 3铙誅卧泻噦圣骋贶頂廡。
1.2.4 驱动模块的选择............. 4擁締凤袜备訊顎轮烂蔷。
1.2.5 显示模块的选择............. 4贓熱俣阃歲匱阊邺镓騷。
1.2.6 电源模块的选择............. 5坛摶乡囂忏蒌鍥铃氈淚。
1.2.7 A/D转换模块的选择 ......... 5蜡變黲癟報伥铉锚鈰赘。
1.2.8 语音播放模块............... 6買鲷鴯譖昙膚遙闫撷凄。
1.3 系统各模块的最终方案............ 7綾镝鯛駕櫬鹕踪韦辚糴。2.系统理论分析与计算 ................. 8驅踬髏彦浃绥譎饴憂锦。
2.1 角度测量原理.................... 8猫虿驢绘燈鮒诛髅貺庑。3.硬件电路的设计 ..................... 9锹籁饗迳琐筆襖鸥娅薔。
3.1系统硬件的基本组成 .............. 9構氽頑黉碩饨荠龈话骛。
3.2 各部分硬件电路模块设计.......... 9輒峄陽檉簖疖網儂號泶。
3.2.1 主控制电路模块设计......... 9尧侧閆繭絳闕绚勵蜆贅。
3.2.2 角度监测模块电路的设计.... 11识饒鎂錕缢灩筧嚌俨淒。
3.2.3 A/D转换模块电路的设计 .... 11凍鈹鋨劳臘锴痫婦胫籴。
3.2.4 风扇驱动模块电路的设计.... 12恥諤銪灭萦欢煬鞏鹜錦。
3.2.5 键盘控制模块电路的设计.... 13鯊腎鑰诎褳鉀沩懼統庫。
3.2.6 LCD显示模块电路的设计 .... 13硕癘鄴颃诌攆檸攜驤蔹。
3.2.7 声光提示模块电路的设计.... 14阌擻輳嬪諫迁择楨秘騖。
3.2.8 语音播放模块电路的设计.... 14氬嚕躑竄贸恳彈瀘颔澩。
3.2.9 电源控制模块电路的设计.... 15釷鹆資贏車贖孙滅獅赘。
4 .软件设计 .......................... 16怂阐譜鯪迳導嘯畫長凉。
4.1 控制算法....................... 16谚辞調担鈧谄动禪泻類。
4.1.1 定频调宽法 .............. 16嘰觐詿缧铴嗫偽純铪锩。
4.1.2 积分分离算法 ............ 17熒绐譏钲鏌觶鷹緇機库。
4.1.3 遇限削弱积分算法 ........ 17鶼渍螻偉阅劍鲰腎邏蘞。
4.2 程序设计思路图................. 18纣忧蔣氳頑莶驅藥悯骛。
4.3 系统软件主流程图............... 18颖刍莖蛺饽亿顿裊赔泷。
5 系统测试仪器 ....................... 20濫驂膽閉驟羥闈詔寢賻。总结 ............................... 21銚銻縵哜鳗鸿锓謎諏涼。致谢 ............................... 22挤貼綬电麥结鈺贖哓类。参考文献 ............................. 23赔荊紳谘侖驟辽輩袜錈。附录1 ................................ 24塤礙籟馐决穩賽釙冊庫。附录2 ................................ 24裊樣祕廬廂颤谚鍘羋蔺。
1.方案论证与选择
1.1 系统的基本组成
题目要求设计制作一个帆板控制系统,通过对风扇转速的控制,调节风力大小,改变帆板转角 。根据题目要求,本系统可以分为控制部分、信号检测部分和电源部分。控制部分则包括显示模块、按键模块、声光报警模块、风扇驱动模块四个基本部分。信号检测部分为角度测量模块(测量帆板的角度)、A/D转换模块。电源部分则给各部分提供电源,系统图如图1.1所示:仓嫗盤紲嘱珑詁鍬齊驁。
图1.1系统总框图
1.2 各模块方案论证与选择
1.2.1 主控制器选择及论证
方案一:采用FPGA(现场可编程门阵列)作为系统的控制器;将所有的器件集成在一块芯片上,这样外围电路较少,控制板的体积小,稳定性高,扩展性能好;而且FPGA采用并行的输入/输出方式,系统处理速度快,再加上FPGA有方便的开发环境和丰富的开发工具等资源可利用,易于调试;但是FPGA得成本偏高,算术运算能力不强,而本设计系统的设计会用到较多算术运算,所以FPGA的高速处理的优势得不到充分体现。绽萬璉轆娛閬蛏鬮绾瀧。
方案二:采用DSP作为控制器。DSP具有强大的控制和信号处理能力,片内具有快速RAM和flash。其次有接口方便、编程方便、稳定性好、精度高等优点。本题主要利用处理器控制风扇的转速,数据处理方面要求不高。骁顾燁鶚巯瀆蕪領鲡赙。
方案三:采用Atmel公司的89系列的单片机作为系统的控制器。单片机控制功能强,软件编程灵活,可用软件较简单的实现逻辑控制,并且其成本低,体积小和功耗低等优点,使其在各个领域中应用广泛;另外,在本设计数据量不大的情况下完全可以完成风扇转速的控制。瑣钋濺暧惲锟缟馭篩凉。
综合比较,本系统采用方案三。
1.2.2 角度监测方案比较
方案一:采用角度传感器监测。角度传感器SYD35D4线性度为±1%,旋转扭矩为M
N ??4
-10
20,分辨率高,最为关键
的是它采用滚珠轴承的机械结构方便与帆板轴承相结合测量角度。SYD35D4 有机械寿命长,分辨率高,转动顺滑,动态噪声小的优良性能。且该方案实现较易。鎦诗涇艳损楼紲鯗餳類。
方案二:采用倾角传感器监测。倾角传感器通常可以同时监测X 轴、Y 轴两个方向的倾斜角度,能够精确测量、跟踪倾斜角的大小和变化。但是测量角度时需要将倾角传感器安装在帆板上,增加了整个帆板装置的重量,同时倾角传感器的精度较高,测量时会将噪声信号带入控制系统,影响角度测量的精度。栉缏歐锄棗鈕种鵑瑶锬。
方案三:采用MMA7260重力加速度传感器,由于加速度传感器在静止放置时受到重力作用,因此会有1g 的重力加速度。利用这个性质,通过测量重力加速度在加速度传感器的X 轴和Y 轴上的分量,可以计算出其在垂直平面上的倾斜角度。根据如图1.2所示,有Ax=gsin α,Ay=gcos α。则
Ay Ax
=tan α
即 α=arctan(
Ax Ay
).这样,根据以上原理一个
2 轴
加速度传感器可以测量在X-Y 平面上的倾斜角度。该方案原理简单,操作方便,但使用起来运算量较大,程序较为复杂,对于单片机来说,处理时太慢且复杂。辔烨棟剛殓攬瑤丽阄应。
图 1.2 加速度传感器角度测量原理
综合比较,本系统采用方案一。
1.2.3 风扇控制方案
方案一:改变励磁电流调速。在这种调速方法中,随着电动机磁通Ф的减小,转矩相应地降低。通常只有在电动机基速以上调速时才采用这种调速方法。峴扬斕滾澗辐滠兴渙藺。
方案二:改变电枢回路电阻调速。这种调速方法为有级调速,转速变化率大,轻载下很难得到低速,效率低,故这种调速方法很少使用。詩叁撻訥烬忧毀厉鋨骜。
方案三:采用PWM调速。PWM技术实现数字方式控制模拟信号。它的开关频率较高,快速响应特性好,动态抗干扰能力强,产生的数字脉冲信号稳定可靠。通过选用定频调宽法容易用单片机实现对风扇风速稳定、均匀的控制。则鯤愜韋瘓賈晖园栋泷。
综合比较,本系统采用方案三。
1.2.4 驱动模块的选择
方案一:采用ULN2803在输入5V工作电压下可最大驱动电压50V、电流650mA的负载,风扇运行起来稳定,可靠性强。因此可选用ULN2803构成风扇驱动电路。胀鏝彈奥秘孫戶孪钇賻。
方案二:采用L298N驱动芯片。L298N芯片是较常用的电机驱动芯片。该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性能,可用单片机的I/O口提供信号,其输出的PWM 脉冲控制直流电机,能够对电机转速的上升与下降进行平滑调节,保证调节过程中本身对风扇的影响最低,但是L298N的发热太快不能长时间工作。鳃躋峽祷紉诵帮废掃減。
方案三:采用大功率三极管,二极管,电阻电容等元件。用上述元件搭建两个H桥,通过对各路信号放大来驱动电机,原理简单。但由于放大电路很难做到完全一致,当电机的功率较大时运行起来会不稳定,很难精确控制。稟虛嬪赈维哜妝扩踴粜。
综合比较,本系统采用方案一。
1.2.5 显示模块的选择
方案一:用LED 显示,优点亮度高、成本低,易于单片机编程,但是显示时占用I/O口多,显示信息量不足。陽簍埡鲑罷規呜旧岿錟。
方案二:采用LCD_12864 液晶显示,功耗低、无辐射显示稳定、抗干扰能力强,编程控制简单,使用方便,显示信
息能力强等特点,且分行显示能够清晰的看清系统所运行的所有信息。沩氣嘮戇苌鑿鑿槠谔應。
方案三:采用LCD-1602液晶显示,其显示是采用背光照亮,对人眼损害很弱,再次LCD又是一种节能灯,功耗小,使用寿命长等优点,不需要外加蕊片组合,可以直接与单片机连接。单片机可以通过软件编程,来实现对液晶的显示的控制与设定。使用起来十分方便,但是此系统设计显示的内容较多,用LCD1602显示不完整。钡嵐縣緱虜荣产涛團蔺。
考虑到本设计的要求,我们选择方案二。
1.2.6 电源模块的选择
使用交流电220v供电,搭建独立电源模块,经变压器变压后,再用7812、7805芯片进行稳压。5V电源为单片机及其他传感器、显示屏等模块供电。使用220v交流电不仅能保证电量充足,而且相对于干电池有恒定的电压和电流。容易完成本设计的要求。所以我们采用此方案。懨俠劑鈍触乐鹇烬觶騮。
1.2.7 A/D转换模块的选择
方案一:TLC1543美国TI司生产的多通道10位模数转换器。采用串行通信接口,具有输入通道多、性价比高、易于和单片机接口的特点,可广泛应用于各种数据采集系统 ,但其AD转换精度不能满足该系统对帆板角度的准确测量。謾饱兗争詣繚鮐癞别瀘。
方案二:采用8位的A/D转换器MAX1113构成A/D转换电路。采用单一的5V电源供电,性价比高、易于与单片机接口连接,但是我们对此芯片原理不够熟悉。呙铉們欤谦鸪饺竞荡赚。
方案三:ADC0804是属于连续渐进式(Successive Approximation Method)的A/D转换器,它是8位,即分辨率为1/256,转换值介于0~255之间,采用单一的5V电源供电。这类型的A/D转换器除了转换速度快(几十至几百us)、分辨率高外,还有价钱便宜的优点,普遍被应用于微电脑的接口设计上。莹谐龌蕲賞组靄绉嚴减。
根据本设计的要求和我们对芯片的熟悉程度,我们最终选用了方案三。
1.2.8 语音播放模块
方案一:采用ZY1420A语音模块。ZY1420A内部使用ISD1420作为主控芯片,虽然它实现的声音较好,但外围电路复杂,实现的要求高,价格昂贵,性价比不高,对工业来说,不利于产品的大规模生产。麸肃鹏镟轿騍镣缚縟糶。
方案二:采用APR9600语音录放集成电路。这是一种永久记忆型语音录放电路,可重复录放10万次。该芯片采用多电平直接模拟量存储专利技术,单片电路可录放32~60秒,串行控制时可分256段以上,并行控制时最大可分8段。具有价格便宜、多种手动控制方式、分段管理方便、多段控制时
电路简单、采样速度及录放音时间可调、每个单键均有开始停止循环多种功能等特点。完全可以满足题目要求。納畴鳗吶鄖禎銣腻鰲锬。
根据本设计的要求,我们最终选用了方案二。
1.3 系统各模块的最终方案
经过仔细分析和论证,决定了系统各模块的最终方案如下:
(1)控制器方案:采用STC89C52单片机控制。
(2)电源方案:采用变压器降压、三端稳压器7805、7812稳压后给整个系统提供恒定的电压与电流。
(3)风扇驱动方案:采用ULN2803芯片来做驱动电路。
(4)角度测量方案:由SYD35D4角度传感器和ADC0804构成角度测量电路。
(5)数字显示方案:采用LCD12864液晶显示。
(6)键盘模块设计方案:4个独立按键。
此外,声光提示模块使用高亮度的LED和蜂鸣器,语音模块使用APR9600语音播报模块,使人们能够清晰的知道角度的位置所在。風撵鲔貓铁频钙蓟纠庙。
单片机STC89C52主要用于控制风扇速度、角度传感器数据处理并与用户进行交互,实现了帆板角度计算、风力大小控制和帆板角度值设定并稳定角度、最终进行声光提示、语
音播报等功能。灭嗳骇諗鋅猎輛觏馊藹。
2.系统理论分析与计算
2.1 角度测量原理
角度传感器的内部可看作是一个电位器。当它工作时,转轴旋转的角度和电位器的电阻值满足函数关系式)(1θf R =,然后将电阻和角度的关系转换成电压和电阻的关系)(2R f U =,
再通过A/D 转换器得到电压数字量)
(3U f U D =,即得到电压数字
量与角度的关系式)(4θf U D =
,最后列出D U 与θ的表格求出角
度。
控 制 按风驱动电3.硬件电路的设计铹鸝饷飾镡閌赀诨癱骝。
3.1系统硬件的基本组成
本系统主要由主控制模块、驱动模块、采集模块、显示模块、电源模块组成其结构框图如图3.1所示,几个模块之间相互独立且存在联系,实现信息状态的上传和控制命令的下发。攙閿频嵘陣澇諗谴隴泸。
图3.1 系统控制框图
3.2 各部分硬件电路模块设计 3.2.1 主控制电路模块设计
主控制电路主要有单片机,独立按键等部分组成,通过控制主电路来控制系统的正常运行,从而实
现题目
的要
显示
按键
控 制 器
驱动电路
电机
传感器
求。其结构框图和电路图分别如图3.2、图3.3所示。趕輾雏纨颗锊
讨跃满賺。
图3.2 主控电路框图
S1切换键S2加一键S3减一键S4
设定键
5V
Y112MHZ
C1
C2
+C3R Q1
Q2
D1
RX
风扇
P0.0
P3.4P3.5P3.6P3.7+24V
EA/VP 31
X119
X218RESET 9
RD 17
WR 16
INT012INT113
T014
T115P101P112P123P134P145P156P167P178
P0039P0138P0237P0336P0435P0534P0633P0732P2021P2122P2223P2324P2425P2526P2627P2728
PSEN
29
ALE/P 30TXD 11RXD 10VCC
40
GND 20
U1
8051
5V
12345678
16151413121110
9
RP18R P0.0P2.0P2.1P2.2P2.3P2.4P2.5P2.6P2.7
P1.0P1.1P1.2P1.3P1.4P1.5P1.6P1.7
P3.3P3.2P3.5P3.4P3.7P3.6P3.0P3.1VCC
P0.1P0.2P0.3P0.4P0.5P0.6P0.7
R12.7K
R2
7.2K
R33K
图3.3 主控电路图
键盘实现功能:首先,键盘我们选择4个独立按键,S1是状态转换键、S2是加一键、S3是减一键、S4是设定键。通过调节按键来控制电机的转速从而控制风速的大小、风扇的启动与停止以及设定范围内角度的调节。夹覡闾辁駁档驀迁锬減。
3.2.2 角度监测模块电路的设计
角度传感器的内部可看做是一个电位器。测量角度传感器的电压值,再通过A/D 转换器得到数字量)
(3U f D U
=,最终由
D U 与θ列出的表格求出转角, 如图3.4
所示。 视絀镘鸸鲚鐘脑钧欖粝。
图
3.4 角度监测电路
3.2.3 A/D 转换模块电路的设计
使用A/D 转换器ADC0804构成A/D 转换电路。ADC0804使用+5V 电源供电,选通通道0输入模拟信号,CS 、RD 、WR 分别和单片机的P2.0、P2.1、P2.2口连接,DB0~DB7分别和单片机的P1口的8个引脚连接,如图3.5所示。偽澀锟攢鴛擋緬铹鈞錠。
控制测量论文控制工程论文
控制测量论文控制工程论文 菜园桥倒虹吸顶管井沉井测量控制 摘要:沉井测量控制包括井体本身尺寸控制和井体高程、轴线平面位置控制;井体尺寸控制作为钢筋混凝土工程的一部分技术十分成熟,在此不再过多赘述,现在针对沉井全过程结合我单位菜园桥倒虹吸顶管井沉井进行探讨。 关键词:沉井测量控制沉降控制轴线控制 1 工程概况 小清河菜园桥倒虹吸顶管的顶管井、接收井设计图纸要求进行沉井施工,两井之间管线长度为132.56m;位于小清河两侧,进水井、出水井沉井深度分别为12.458m、13.97m;分三节进行施工;进水井地质情况为0-9.2m为亚粘土、9.2-10.5为亚粘土混姜石,10.5-12.458为亚粘土;出水井地质情况为0-9.8m为亚粘土,9.8-10.7为亚粘土混姜石,10.7-13.97为亚粘土。 2 测量依据 ①《济南市小清河综合治理污水工程》图纸;②《工程测量规范》(GB50026-2007);③《给水排水构筑物施工及验收规范》(GB50141-2008)。 3坐标和高程控制点的设置 根据测绘院提供的坐标控制点以及向对应的高程控制点,我们对
坐标和高程控制点,进行了复测和加密,并在小清河两侧沉井位置各设置了8个坐标控制点网、3个高程控制点(在施工过程中至少要保证2个坐标控制点以及2个高程控制点),防止由于土方开挖或者其他原因导致控制点破坏或者是移动,根据以往经验,控制点无论在什么位置都有可能被破坏,所以要经常核对高程和坐标点进行复测,复测频率约为一周一次,如有破坏则进行补测。 4沉井基坑测量 根据图纸中的沉井中心坐标以及沉井尺寸,从AUTOCAD图中计算出沉井四个内角的坐标;根据沉井四个内角尺寸进行放样确定基坑开挖边线(内尺寸线以外1.5m),挖深5m,边坡坡度1:0.75。 5 测量控制内容 5.1 沉降测量在第一节井墙的浇筑完成模板拆除后,应进行刃脚高程测量和顶部混凝土面测量,同时在沉井的四个角外壁墙上用红漆做好测量基准点,以此点作为基准,进行高程测量: 5.1.1 在混凝土模板拆除后应先在四个外角的外侧用红漆做好标记,测量其高程记录测量原始数据计算下沉具体高度。 5.1.2 沉井在下沉时,应注意观测正常情况下刃角标高,每班至少观测一次,对轴线位移2~3天测量一次。当沉井每次下沉稳定后,应进行高差和中心位移测量。 5.1.3 沉井在初沉阶段,每2h至少观测一次(高程),如果沉井较快时,加大观测力度,必要时应连续进行观测,提供数据,以便及
电赛论文最终.
帆板控制系统设计(F题) 摘要:本系统以单片机STC12C5A48S2为控制核心及数据处理核心,采用加速度传感器MMA7260作为角度检测的核心器件,设计并制作了一个帆板控制系统。以L293构成电机的电路,通过对风扇转角的控制,调节风力的大小,改变帆板的转角θ。可以通过键盘设置帆板转角0~60o,并在LCD上实时显示θ。使用了PID算法,使系统能快速达到稳定。由于采用了低功耗单片机,并且使用了一些高性价比、低功耗的器件去设计电路,因此本放大器具有成本低,功耗小,性价比高的优点。 关键词:控制系统;角速度传感器;单片机;PID;
一、方案比较与选择 题目分析:综合分析题目要求,转动帆板时,实现实时显示角度,且能够通过键盘控制风力,是本题的最大难点,也是设计的重点之一。另一难点是使帆板转角达到60o。要得到更好的性能指标,放大电路的零点漂移也是一个很难解决的问题。此外,在整个电路的设计中,要考虑其成本。 1、数据处理和控制核心选择 方案一:采用DSP最小系统板。即由DSP来实现电机的控制、传感器信号采集和人机界面控制等功能。 方案二:采用单片机STC12C5A48S2最小系统板。即由单片机STC12C5A48S2实现整个系统的统一控制和数据处理。 本系统不涉及大量的数据存储和复杂处理,虽然方案一控制更灵活更方便,但DSP的资源得不到充分利用,且系统规模大,成本高。而单片机STC12C5A48S2是一种8位低功耗微、高性能处理器,具有丰富的片上外设和较强的运算能力,且可串口编程,使用十分方便,性价比高。 综上所述,故采用方案二。 2、角度传感器的比较与选择 方案一:角度传感器KMZ41与信号调理芯片UZZ9001组成的角度采集模块。KMZ41与信号调理芯片UZZ9001一起,能够对180°范围内的角度信号进行测量,并利用SP I方式提供11位的角度信号输出。调试繁琐,且电路稳定性差。 方案二:采用MMA7260三轴加速度传感器。这个三轴加速度计用的是Freescale (飞思卡尔)公司生产性价比高微型电容式加速度传感器MMA7260芯片。用三轴加速度计利用重力分量换算原理,来测量角度与其他数字量倾角传感器相比自然要精准许多,因为模拟量的,可将电压值换算对应倾斜角度值,所以在许多需要测量角度的场合,非运动的条件下,不妨可以试试使用加速度计。 综上所述,采用方案二,电路集成度高、控制方便、易于用单片机处理。 3、显示系统的比较与选择 方案一:用数码管进行显示。数码管由于显示速度快,使用简单,显示效果简洁明了而得到了广泛应用。但是由于本题中要同时显示两个方向的倾斜角度,用数码管无法显示如此丰富的内容。 方案二:用LCD液晶进行显示,由于其显示清晰,内容丰富、清晰,信息量大,使用方便。 综上所述,本系统要显示的内容较丰富,采用方案二。 二、总体方案设计及系统方框图 本设计由角度传感器,经单片机控制器采集角度信息,再由单片机控制信号到驱动板,以调节风扇的转速,从而控制帆板的角度。 根据设计要求,此系统难点在于角度传感器的选取,及对于流体力学控制。因此,为能够检测到角度,本系统采用加速度传感器,利用重力分量,从而得到帆板的角度。对于自动调节帆板的角度,是由风扇的转速决定,而风扇是直流电机,对于直流电机的调速,本设计的驱动方式采用双H桥并联,控制信号上采用了PWM的调节方式,并可以调节电机运行在四象限。 由于系统设计各数据的难以测量,如风叶片与风流大小,风向的扩散性等因数。
水温自动控制系统毕业设计论文(DOC)
毕业设计论文 水温自动控制系统 钟野 院系:电子信息工程学系 专业:电气自动化技术 班级: 学号: 指导教师: 职称(或学位): 2011年5 月
目录 1 引言 (2) 2 方案设计 (2) 2.1 总体系统的设计思路 (2) 2.2 部分外围系统的设计思路 (3) 3 硬件电路设计 (3) 3.1 单片机最小系统的设计 (3) 3.2 温度检测电路的设计与论证 (4) 3.3 显示功能电路的设计与论证 (5) 3.4 温度报警提示功能电路的设计与论证 (5) 3.5 外围电路控制设计 (6) 3.6 扩展部分方案设计 (7) 4 软件设计 (7) 4.1 控制主程序设计 (7) 4.2 温度设置程序设计 (8) 4.3 上下限报警程序设计 (8) 5 结论 (9) 结束语 (9) 致谢 (10) 参考文献 (10) 附录............................................................................................................... 错误!未定义书签。
水温自动控制系统 钟野 (XXXX电子信息工程学系指导教师:CXJ) 摘要:本文设计主要是采用A T89C51单片机为控制核心、以温度传感器(DS18B20)为温度采集元件, 外加温度设置电路、温度采集电路、显示电路、报警电路和加热电路来实现对水温的显示同时自动检测及线性化处理,其误差小于±0.5℃。本文重点介绍硬件设计方案的论证和选择,以及各部分功能控制的软件的设计。本次设计的目标在于:由单片机来实现水温的自动检测及自动控制,实现设备的智能化。 关键词:单片机;温度传感器;自动控制 Abstract: This paper is designed AT89C51 microcontroller as control core and temperature sensor DS18B20) for (temperature gathering element, plus the temperature setting circuit, temperature gathering electriccircuit, display circuit, alarm circuit and heating circuit to achieve water temperature display while automatically detecting and linearization, its error is less than 0.5 + ℃. This paper mainly introduces the hardware design argumentation and choice, and some functional control software design. This design goal is: by single-chip microcomputer to realize the automatic detection and automatic temperature control, realize the intellectualized equipment. Keywords: Microcontroller; Temperature sensors; Automatic control
帆板控制系统设计电子信息工程论文
毕业设计(论文) 帆板控制系统 姓名:xxxxxx 系别: 年级: 专业:电子信息工程 指导老师: 帆板控制系统
【摘要】本设计采用STC89C52RC为中心控制器,利用角度传感器来的采集、处理实现对风扇转速的控制,调节风力大小,进而改变帆板转角大小;帆板的角度检测,通过ADXL345模块,实现控制帆板角度的大小;通过充分比较、论证,最终选用小型直流电机作为风扇的制动源,小型直流电机力矩大、操作简单、价格低且能满足设计需求;系统显示采用LCD12864液晶,用于实时显示帆板的角度大小;控制电机是以NPN三极管BU406为驱动,再利用PWM算法算出合理的脉冲占空比;最后经过多次测试表明,系统完全达到了设计要求,不但完成了所有基本和发挥部分的要求,并增加实现了实时显示占空比全程变化的功能。 【关键词】自动控制、帆板、角度测量、小型直流电机、液晶显示、脉宽调制 Panel Control System 【Abstrct】According to the panel control system design requirements, to design the whole system was studied, established the optimal design scheme, using STC89C52RC as the center controller, using the angle sensor to the acquisition, processing of the fan speed control. The power adjustment, and then change the windsurfer windsurfing angle; angle detection. Through the ADXL345 module realization of control panel, in terms of size; by comparison, the final selection of full proof, small DC motor as the braking source fan, small DC motor torque, simple operation, low price and can satisfy the design requirement; display system using LCD12864, used for real-time display panel angle; control motor is NPN three. BU406 drive, then the use of PWM algorithm calculates the reasonable pulse duty ratio; finally after many tests show that.The system meets the design requirements, not only finished all the basic and the requirements to play a part, and to increase the real-time display of the whole function of the variation of duty ratio. 【Keywords】A utomatic Control, Windsurfing, Angle Measurement, Small DC Motor, Liquid Crystal Display, Pulse Width Modulation
建筑工程技术毕业设计论文
. 毕业设计(论文) 题目:重庆市武隆县造纸厂职工宿舍楼建筑施工图及 施工组织设计 院 (系):建筑工程系 专业:建筑工程技术 姓名: 学号: 指导教师:
摘要 此次毕业设计,设计的是重庆市武隆县造纸厂职工楼施工图纸,建筑面积为2780.4㎡,建筑总高度为20.7m,采用框架结构,天然地基,独立柱基础。本次设计的主要内容是施工组织设计的编写。 施工组织设计的内容包括编制依据、工程概况、施工部署、施工进度计划、施工准备与资源配置计划、主要施工方案、进度管理计划、质量管理计划、安全管计划、季节性施工、施工现场平面布置图等。本次使用工期定额是全国统一建筑安装工程工期定额(2000)。 关键词:施工组织组织管理质量保证施工方案
目录 第1章编制依据 (5) 第2章工程概况 (5) 第3章施工前的准备工作 (7) 3.1 技术准备 (7) 3.2 现场准备 (8) 3.3 劳动力准备及劳动力进场计划 (8) 3.4 主要施工机械设备准备及进场计划 (9) 第4章施工进度计划及工期保证措施 (10) 4.1 施工总进度计划 (10) 4.2 各阶段施工进度计划 (10) 4.3 保证工期措施 (10) 4.3.1 组织措施 (10) 4.3.2 各阶段施工进度计划 (10) 4.3.3 经济措施 (11) 4.3.4 技术措施 (11) 第5章施工平面规划 (13) 5.1 施工用水 (13)
5.2 施工用电 (13) 5.3 施工道路 (13) 5.4 临时布置 (13) 第6章各项管理及保证措施 (14) 6.1 工程质量方针 (14) 6.2 工程质量目标 (14) 6.3 质量保证措施 (14) 6.3.1 组织保证 (14) 6.3.2 制度保证 (15) 6.3.3 管理措施 (15) 6.4 安全生产措施 (16) 6.4.1 安全管理体系认证和安全资格 (16) 6.4.2 安全生产目标 (16) 6.4.3 安全管理体系 (16) 6.4.4 安全生产责任制 (16) 6.4.5 安全生产制度 (16) 6.4.6 保证安全生产的具体措施 (18) 6.5 环境管理和文明施工措施 (19) 6.5.1 环境管理措施 (19) 6.5.2 文明施工管理 (21)
材料成型及控制工程专业毕业设计(论文)外文翻译
中文2500字 本科毕业设计翻译 学生姓名:***** 班级:*****班 学号:***** 学院:材料科学与工程学院 专业:材料成型及控制工程 指导教师:***** 副教授 2011年3月25日
Section 4 – Die Design and Construction Guidelines for HSS Dies General Guidelines for Die Design and Construction Draw Dies Higher than normal binder pressure and press tonnage is necessary with H.S.S. in order to maintain process control and to minimize buckles on the binder. Dies must be designed for proper press type and size. In some cases, a double action press or hydraulic press cushion may be required toachieve the necessary binder forces and control. Air cushions or nitrogen cylinders may not provide the required force for setting of draw beads or maintaining binder closure if H.S.S. is of higher strength or thickness. Draw beads for H.S.S. should not extend around corners of the draw die. This will result in locking out the metal flow and cause splitting in corners of stamping. D raw beads should “run out” at the tangent of the corner radius to minimize metal compression in corners, as shown in figure 16 on page 47. Better grades of die material may be necessary depending on the characteristics of the HSS, the severity of the part geometry, and the production volume. A draw die surface treatment, such as chrome plating, may be recommended for outer panel applications. Form and Flange Dies Part setup in form and flange dies must allow for proper overbend on all flanges for springback compensation. Springback allowance must be increased as material strength increases; 3 degrees for mild steels, but 6 degrees or more
温度自动控制系统的设计毕业设计论文
北方民族大学学士学位论文论文题目:温度自动控制系统的设计 北方民族大学教务处制
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
帆板控制系统论文
帆板控制系统 摘要:本设计给出了以MSP430F149为核心的帆板控制系统的基本原理与实现方案。由倾角测量模块、电机驱动模块、显示模块、调节模块等模块组成。采用SCA103T倾角传感器,可实现倾角精确测量。采用直流电机驱动风扇。系统功能由按键控制,可对测量结果进行实时显示,人机交互界面友好,经测试,达到了较好的性能指标。 关键词:MSP430F149,倾角传感器,电机驱动 The Panels Control System Abstract: The basic principle and implements solutions of the control system of the panels are given using MSP430F149 as the core. It is composed by inclination measurement modules, motor driver module, display module and adjust module. It can realize precision measurement using the SCA103T tilt sensor. Fan is driver by the dc motor, The system function is controlled by keys and the measurement result can be real-time displayed, the system has good man-machine interface and achieved better performance indicators by test,. Keywords: MSP430F149,Inclination sensor,motor driver
工程管理毕业设计论文摘要
庆阳市西峰区阳光住宅小区4﹟住宅楼标后相关文件 的编制 (施工图预算(土建部分)、标后施工组织设计(清单)、监理文件) [摘要]庆阳市西峰区阳光住宅小区4﹟住宅楼施工图预算(土建部分),标后施工组织设计,监理文件;施工图预算部分,依据国家现行建筑工程有关技术标准、规范、规程及法律、法规文件,以及甘肃省工程造价指导信息等进行编制。主要编制了单位工程预算表、人材机汇总表、主要材料、机械台班数量汇总表、建筑工程费用计算表、分项工程人材机汇总表等。通过科学的计算步骤,最终计算出该项工程的单方造价1247.57元,本工程总造价为14035850.42元;施工组织设计部分包括了编制说明、编制依据、范围、原则施工进度计划和工期保证措施、施工总平面布置和工程概况;确定施工总体目标,分析了施工总体布置的内容;阐述了施工准备的主要内容;具体说明了工程进度计划、机械选择、施工主要设备与工器具配置计划、施工主要材料采购与进场计划等分项工程的施工工艺及方案;详细介绍了本工程的质量、工期、安全的保证措施;文明施工和环境保护措施;还分别对雨季、冬季、夜间等特殊施工的技术措施做了介绍,并编排了相关工程项目的进度计划;监理文件部分包括监理文件大纲、监理规划、监理实施细则等。 关键词:预算、施工组织、监理文件
preparation of relevant documents (Construction drawing budget (civil section), after the standard construction organization plan ( list )and project management files) [Summary ]Xifeng district sunshine residential district in qingyang city 4﹟residential building construction drawing budget (construction), construction organization after design, project management files; construction drawing budget component, based on the national current building-related technical standards, specifications, regulations and laws, regulations, and instructions for the preparation of project cost in Gansu province. Main compilation unit summary of project budget, manpower, material, machine-class quantity summary table, construction cost breakdown table, summary of engineering talent. By science of calculation steps, eventually calculation out the items engineering of unilateral cost 1247.57 Yuan, this engineering total cost for 14035850.42 Yuan; construction organization design part including has prepared description, and prepared pursuant to, and range, and principles construction progress plans and duration guarantee measures, and construction total plane layout and engineering overview; determines construction general target, analysis has construction general layout of content; explained has construction prepared of main content ; Specific description has engineering progress plans, and machinery select, and construction main device and workers apparatus configuration plans, and construction main material procurement and approach plans divide items engineering of construction technology and the programme; more describes has this engineering of quality, and duration, and security of guarantee measures; civilization construction and environmental protection measures; also respectively on rainy season, and winter, and night, special construction of technology measures do has describes, and arrangement has related project of progress plans; supervision file part including supervision file outline, and supervision planning, and supervision implementation rules,. Keywords:Budgeting, supervision of construction organizations, documents
温度自动控制系统的设计毕业设计
论文题目:温度自动控制系统的设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
网上购书系统毕业设计
摘要 随着网络技术的发展,Internet已成为最具市场潜力的技术领域,使用Web技术设计的数据库应用软件,是目前Internet市场的技术中坚,各种Web应用如电子商务,网上购物等都采用这种方式实现。 网上购书在国外已经是一个比较常见的购书方式了,而在我国,网上购书才是刚刚起步,但发展的速度却十分的惊人。本系统主要实现了用户的管理、书籍的查找与购买、购物车的实现、订单的管理以及用户留言等功能,为用户提供了迅速、便利的网上购书环境。 本系统采用JSP、Servlet、JavaBean和JDBC等一些JA V A Web相关技术实现了一个简单的网上购书系统,MVC开发模式可以分离数据访问和数据表现,让开发人员可以开发一个可伸缩性强的、便于扩展的控制器,来维护整个流程。本系统通用性强,经过简单的修改就可以应用于更广泛的网上购物系统,具有一定的推广价值。 关键词:书店;数据库;JSP;Servlet;JavaBean
Abstract With the development of network technology, Internet has become the most market potential of technology, the use of Web technology, designed for database application software, is the Internet market, the technical backbone of a variety of Web applications such as e-commerce, online shopping and so using this ways. Online textbook abroad is a relatively common textbook approach, while in China, online textbook is just started, but the pace of development was very amazing. This system mainly achieves the user's management, the search and the sale of books, shopping cart implementation, order management, and user comments and other functions, provides users with fast and convenient online friendly environment. In this system, JSP, Servlet, JavaBean, and JDBC and some other JA V A Web-related technology to achieve a simple online textbook system that versatility, MVC development model can be separated from data access and data performance, so developers can develop a strong scalability, scalable controller, to maintain the entire process. Through a simple modification can be applied to a wider range of online shopping system, with a certain extension purchase. Keywords: bookstore; database;JSP;Servlet;JavaBean
帆板控制系统报告
帆板控制系统 题目:帆板与控制系统组员: 指导老师: 时间:2014. 8. 11
摘要 随着社会的发展,智能化已经成为现代化产品发展的新趋势,帆板角度控制系统成为测量风力大小的产品,即可以节约电能,又可以把测量风力大小的设备向智能化产品方向过渡。 本系统采用SCT89C51单片机作为控制核心,利用角度传感器ADXL335、电机驱动L298N、液晶显示、键盘控制、声光报警等多个模块实现帆板控制系统。安置在帆板上的角度传感器将检测信号通过AD转换后传送给单片机控制系统,计算出帆板旋转角度,并由单片机控制液晶进行信息显示。帆板旋转角度可通过键盘设置风力等级,由单片机通过PWM方式驱动直流电机运转进行调速。配合角度传感器可以实时调节电机转速,进而带动风扇调整帆板转角。 测试结果证明,帆板控制系统运行稳定可靠,可以准确快速地调整帆板角度,液晶显示内容直观。
目录 第一章前言 (1) 第二章系统整体分析 (2) 2.1方案的论证 (2) 2.1.1输入模块的选择 (2) 2.2 系统的整体 (4) 第三章硬件电路 (6) 3.1 按键电路 (6) 3.2 主控电路 (6) 3.2.1振荡电路 (6) 3.2.2复位电路 (7) 3.3 风扇控制电路 (7) 3.4 显示电路 (8) 3.7 硬件系统 (9) 第四章软件系统 (10) 4.1 控制算法 (10) 4.2 角度测量原理 (10) 4.3.1 KEIL简介 (10) 4.3.2 Proteus简介 (10) 4.4 软件设计 (11) 第五章仿真与调试 (12) 5.1仿真 (12) 5.2测量 (13) 第六章总结 (18) 附录 (19)
计算机软件工程毕业设计论文
目录 目录 (1) 摘要 (1) 前言 (3) 第一章绪论 (4) 1.1研究背景 (4) 1.2设计目标 (4) 1.3本文结构 (5) 第二章系统开发环境与技术 (6) 2.1系统开发环境 (6) 2.1.1 MyEclipse插件介绍 (6) 2.1.2 Tomcat服务器介绍 (6) 2.2系统开发技术 (7) 2.2.1 JSP与Servlet技术 (7) 2.2.2 JavaScript简介 (10) 2.2.3 MVC模式 (11) 2.2.4 Struts框架 (11) 2.2.5 Spring框架 (13) 2.2.6 Hibernate框架 (15) 第三章系统需求分析与前台设计 (17) 3.1需求分析 (17) 3.1.1 系统前台简要设计概述 (17) 3.1.2 系统用例图 (18) 3.2系统设计 (18) 3.2.1 系统层次划分 (18) 3.2.2 数据库设计 (19) 3.2.3 成本管理模块时序图 (22) 第四章系统详细设计与功能实现 (27) 4.1系统项目的文件夹结构 (27) 4.2成本管理模块的具体实现 (28) 4.2.1 查询成本信息列表功能的实现 (28)
4.2.3 修改成本信息功能的实现 (36) 4.2.4 删除成本信息功能的实现 (39) 4.2.5 查看成本明细信息功能的实现 (41) 第五章总结与展望 (43) 5.1课题总结 (43) 5.2进一步开发的展望 (43) 参考文献 (44) 致谢 (45)
摘要 服饰企业生产状况联络表是针对企业的实际情况而进行设计、开发的,而成本管理模块则是为了保持产品的成本信息及时的保存、更新。利用JSP技术和SSH框架以及相应的数据库访问技术实现了基于Web的系统。该框架可以减少模块之间的耦合性,让开发人员减轻重新建立解决复杂问题方案的负担,并且可以被扩展以进行内部的定制化。通过使用JSP技术建设动态网站,充分发挥了Java语言所独有的易用性、跨平台性和安全性,从而构建了一个运行高效、安全可靠、适用性广的管理系统,实现了企业信息资源的网上管理,满足了公司业务处理的需要,使企业适应了网络经济时代发展的要求。 论文首先简要介绍了企业管理系统的一些研究与应用背景,其次介绍了该网站系统所采用的开发工具、平台以及开发环境。在此基础上,论文详尽描述了成本管理系统情况。 关键词:JSP,SSH框架,成本管理 作者:XX 指导老师:XX
材料成型及控制工程毕业论文
化学沉积中磷含量Ni-W- P合金晶化 及耐蚀性研究 作者姓名安宁 专业材料成型及控制工程06-1 指导教师宏 专业技术职务教授
目录 摘要 (1) 第一章绪论 (3) 1.1化学镀技术的研究及发展趋势 (3) 1.1.1 化学镀的基本原理 (3) 1.1.2 化学镀镀液组成及作用 (4) 1.1.3 化学镀技术研究概述 (6) 1.1.4 化学镀技术在国的发展 (8) 1.1.5 化学镀技术的应用 (9) 1.1.6 化学镀的发展趋势 (10) 1.2化学沉积层晶化转变机理 (11) 1.3企业设备腐蚀的现状及危害 (11) 1.4本文的目的、意义及研究容 (12) 1.4.1 研究目的及意义 (12) 1.4.2 研究容 (12) 第二章混晶态Ni-W-P合金镀层的制备与实验方法 (14) 2.1实验材料与仪器 (14) 2.2化学镀镀液的组成及配制工艺 (14) 2.2.1 化学镀镀液的组成 (14) 2.2.2 化学镀镀液的配制工艺 (14) 2.3实验方法 (14) 2.3.1 镀前处理 (15) 2.3.2 化学沉积过程 (15) 2.4沉积层检测及性能测试 (15) 2.4.1 沉积层的结构测试 (15) 2.4.2 沉积层的形貌观察及成分测试 (16) 2.4.3 沉积层耐蚀性能测试 (17) 2.4.4 热处理后沉积层的性能测试 (17) 第三章实验结果与分析 (19) 3.1化学沉积中磷含量Ni-W-P合金镀层的微观分析 (19) 3.1.1 镀层的X射线(XRD)衍射分析 (19) 3.1.2 镀层热处理前后的表面形貌及成分分析 (23) 3.1.3 镀层的晶化过程及晶粒尺寸 (25) 3.2热处理前后镀层耐蚀性分析 (26) 第四章结论 (28)
毕业答辩
本人自述 胡主任、任老师下午好: 我是来自电气0901班的曹祥超,本人毕业设计题目为帆板控制系统 此帆板控制系统主要要求是: 1、基本要求 (1)用手扳动帆板时,能够数字显示帆板的转角。显示范围为0-60度,分辨力为2度,绝对误差<=5度。 (2) 当间距d等于10cm时,通过操作键盘控制风力大小,使帆板转角能在0-60度范围内变化,并要求实时显示。 (3)当间距d等于10cm时,通过操作键盘控制风力大小,使帆板转角稳定 在455度范围内。要求控制过程在10秒内完成,实时显示,并有声光提示,以便测试。2、发挥部分(1)当间距d=10 cm时,通过键盘设定帆板转角,其范围为0-60度,要求在5秒内达到设定值,并实时显示。最大误差绝对值不能超过5度。 (2)间距d在7-15cm范围内任意选择,通过键盘设定帆板转角,范围在0-60度。要求在5秒内达到设定值,并实时显示。最大误差的绝对值不超过5度。 等基本部分和发挥部分,具体的设计要求请老师可以查看毕业设计论文任务设计书部分。 设计的思路: 该系统的基本设计思路为通过按键调节改变风扇风力大小进而改变帆板的转动角度,再通过角度测量传感器测量帆板转角通过液晶显示出来。能够更直观的看到帆板的转动角度。 本系统主要是由主控制模块,驱动模块,采集模块,显示模块,电源模块组成,为了满足帆板控制系统的设计要求,进行了个模块的比较论证及确定。 在主控制模块中我们选用宏晶科技生产的STC12C5A60S2单片机,此单片机是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,速度更快,而且体积小性能高。 在驱动模块中我们选用ST生产的高电压大电流可用单片机的I/O口提供信