机载三维成像激光雷达实时探测精度分析
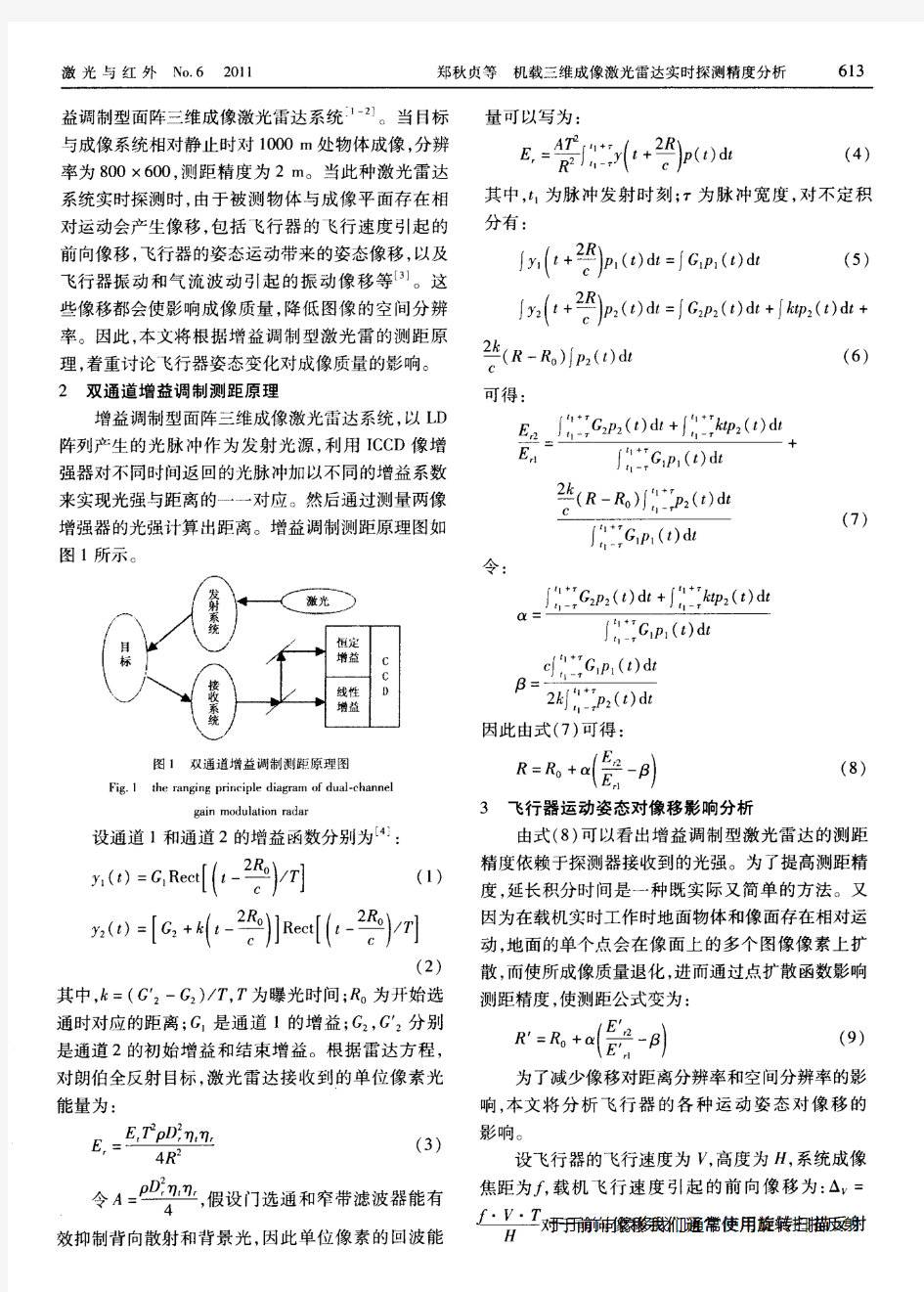
小面阵三维成像激光雷达原理样机 激光三维成像雷达作为近年来高速发展的新型遥感技术,国内研究单位的热点多集中于点源和线列探测的民用测绘领域,由于受到阵列探测器的渠道制约,面阵探测器的研究未受到重视。本系统试以基于小面阵探测器的高帧频、宽收容的激光三维主动成像雷达为探索目标,研究了实现高帧频、宽收容所涉及的关键技术,完成原理样机系统的搭建。同时,对MEMS摆镜在小型化激光三维成像雷达系统中的应用进行了研究。本文主要围绕小面阵三维成像激光雷达样机的设计要求,提出了用激光分束照明以实现发射光束与探测器像元的配准,同时采用了收发共口径的光学系统,有利于系统的小型化集成。 对于小面阵探测器的高精度激光测距技术,详细分析了激光测距的误差组成,研究了对面阵探测器的温度补偿技术、低噪声回波放大技术、恒比定时技术等,分别基于单元探测器和面阵探测器设计了高精度的测距实验,并对实验结果进行了分析。本文的主要研究成果和创新点归纳如下:(1)利用达曼光栅实现了发射激光束的分束照明,配合收发共口径的光学系统,实现了APD阵列像元和激光探测光斑的配准关系,缩小了光学头部的体积。(2)通过研究低噪声放大技术、自动温度补偿技术、恒比定时技术和峰值保持电路等,解决了小面阵探测器的并行高速处理技术,实现了小面阵探测器的厘米级高精度的测距结果。(3)在国内小面阵APD探测器三维成像工程应用领域,做出了有益的探索,在单束发射脉冲无扫描 的原理样机试验中,得到了探测目标的面阵成像数据,取得了理想的结果。 (4)对MEMS摆镜应用于小型化激光成像雷达的方案做出了分析,提出了配合二次光学扩束系统的收发共轴光学系统。
机载激光雷达数据后处理软件(LiDAR_Suite)简介 LiDAR_Suite是武汉天擎空间信息技术有限公司在国家高新技术发展计划项目基础上,开发的具有完全自主知识产权的机载LiDAR 数据后处理软件(如图1)。 图1:LiDAR_Suite 系统界面 LiDAR_Suite 综合考虑了当前机载激光雷达数据处理与应用的实际,形成了一套从原始点云数据到高质量行业产品、成熟高效的机载LiDAR数据处理工艺流程。LiDAR_Suite 功能齐全,性能稳定,提供了涵盖机载激光雷达数据预处理、基础共性处理和专业应用处理等三个处理层次的丰富功能。具体包括: 1)机载LiDAR 点云数据、影像、矢量及DEM 等多源空间数据的存取与可视 化,提供了和主流LiDAR 数据处理软件、遥感影像处理软件以及GIS软件的数据接口; 2)机载LiDAR 数据质量控制;机载LiDAR 系统检校、点云数据精度评价 和点云数据的无缝航带拼接; 3)海量点云数据的工程化组织管理及其自动批处理;集群环境下的点云数据快 速处理; 4)多种点云数据的自动滤波、分类算法,基于多模式和多视图的点云编辑精细
分类,多模式和可视化的分类精度评价; 5)基于机载LiDAR 点云的高质量数字高程模型和等高线生产; 6)面向机载LiDAR 同机航空数码相机的整区域快速正射影像生产;机载 LiDAR点云与非同机遥感影像的配准; 7)电力行业应用:电力线提取与建模、电力设施周边地物要素采集、危险点间 距量测等; 8)数字城市应用:独立的子模块Building Modeler,实现城市建筑物三维模型的 自动、半自动建立。 LiDAR_Suite采用了当前机载LiDAR最新数据处理技术,采用了模块化设计思想以及插件集成技术,在可视化、人机交互、易操作性、处理精度与效率等方面与现有商业化的主流机载激光雷达数据处理软件相比均具有一定的技术优势,并提供了灵活方便的、面向行业的二次开发功能。LiDAR_Suite兼顾了先进算法自动化处理和人机交互的作用,使系统更具实用性;面向专业应用提供了测绘生产、数字城市建模、电力行业应用等功能。目前,该软件已应用于实际的高精效测绘生产中,完成从原始点云数据到基础测绘产品生产(含DEM、DOM、等高线、部分DLG)以及产品精度评价的全部流程,效果良好(图2为数据生产工程管理示意图,图3为多模式和多视图的点云精细分类编辑示意图,图4为点云自动分类结果,图5为高精度DEM渲染结果,图6为电力悬链线的提取与建模,图7为建筑物半自动建模)。目前,LiDAR_Suite的生产处理成果已应用于国土、交通、水利等领域,并可望在更多领域如资源、环境、灾害、电力、农林等得到广泛应用。
激光雷达与激光成像雷达 一、激光雷达与激光成像雷达 一、激光雷达与激光成像雷达 人通过感觉器官感知,认识外部世界的一切。用耳朵听音乐、话音、机器的轰隆声、钟声、铃声等一切通过声音传递的信息;用手感觉温度、物体的硬软以及物质的存在;用眼睛观察外部世界的形状、颜色、运动状态、速度、位置、识别物体的种类等等。人的眼睛之所以可以看见外部世界,是因为太阳光谱中的可见光照射在物体上反射的结果。那么除了“可见光谱”之外还存在别的“不可见的光谱”吗?事实上,广义的光谱按频段的不同,有大家所熟悉的电磁波、远红外、近红外、可见光、紫外光谱,而可见光谱区中,红色的光波长最长,紫色的波长最短。而且人们已经发现不同的物质辐射不同的谱线,在特定的条件下还可以只辐射某一单一波长的谱线,当其人们发现不可见光谱区中的单一的光谱谱线具有可贵的特性的时候,就力图去产生、开发、利用这种单一光谱谱线,由此产生了激光及用于不同场合的激光系统。 视觉引发人们的形象思维,眼睛从外界事物所获取的信息量大,直接而快速,是其他感觉器官所不能代替的,这也就是古人所说的“眼见为实”的深切内涵。正是因为这个道理,人们不愿受限于“可见光”的可见,而想去探求自然光条件下所看不见的东西,如想在漆黑的夜晚,去观察外部世界,就开发出了“夜视仪”。被动“红外热成像仪”也不是依赖于可见光的反射特性去观察变幻莫测的外部世界的,而是依赖于物体本身的热辐射,无论白天或黑夜都可以用以观察人类世界的一切,而且已经是超视距的。目前最新的热成像仪,1ms内热敏成像。红外成像高速测温用来检测来复枪,其射出的弹头在弹道上飞行速度为840m/s,弹头距枪口0.914 4m处的热成像还能分辨出弹头上不同部位摩擦热的温差。 遥感仪则可以依据物体本身的辐射谱线,包括电磁波段与红外光区,远距离成像,把肉眼原本看不见的自然变化,转化为可见,以照片的形式或屏幕显示的图像,甚至动态图像的形式展现出来,这就是当今人们感兴趣的可视化技术。人们力图从各个领域做这方面的研究和开发应用。 通过眼睛人们能够确定方向——定位,作为控制手的动作的依据,当然这是受限于“视距”之内的,通过望远镜可以延伸视距;但是“定位”的精度达不到人们通用目的需要,所谓“差之毫厘,失之千里”。雷达满足了远距离定位和精度的要求,雷达源于英文Radio Detection And Ranging的缩写RADAR,于1935年问世。 当其“激光”这种波长处于红外光谱波段的“激光光源”被研究出来之后,人们自然想到利用微米波段(红外光谱波段)的光波作为信息的载体去探测、获取其他手段难于探测、观测到的目标的信息。激光雷达研制成功后,相继激光成像雷达应运而生。激光雷达的英文名字“LADAR”是Laser Detection And Ranging的缩写。激光雷达的研究是从目标探测和测距入手的,早期(1962~1976年)的研究系统被称为光雷达(Optical RADAR),并命名为LIDAR(Light Detection And Ranging)。可以说军事应用对测量系统精确度的要求日
机载激光雷达选择参考 目前市场上销售的机载激光雷达来自多个厂家,有多种品牌和种类。那么,如何从中选择技术先进、性价比好、故障少又售后服务完善的设备呢? 一、机载激光雷达系统生产厂家介绍 目前提供机载激光雷达设备的厂家主要有:徕卡、Optech(加拿大)、IGI、天宝、TopEye和Riegl。 这些厂家的特点是什么呢? (a)自己生产机载激光扫描仪,然后购买其他厂家的GPS/IMU及硬件和软件,集成机载激光雷达。这类厂家有徕卡,Optech(加拿大),Topeye(瑞典)和Riegl(奥地利)。 在这些生产激光扫描仪的厂家中,生产规模最大的和研究能力最强的是Riegl公司,他向许多厂家提供了一系列产品,如: LMS-Q系列机载激光扫描仪:LMS-Q240, LMS-Q280, LMS-Q120i,LMS-Q160(超轻型,防摔型,无人机专用)等。 新型的具备数字化全波形数据获取和实时处理能力的VQ系列机载激光扫描仪:VQ180, VQ280, VQ480,LMS-Q560和VQ680i等。 目前,徕卡只生产一种激光扫描仪,而其他厂家也大多只生产两款机载激光扫描仪作为自己的系统集成使用。Optech虽然能够生产具备数字化全波形数据的激光扫描仪,但不是标准配置,用户需要另外付费。但即便如此,也已经落后Riegl公司六年。 这里还要指出的是:徕卡公司在2005年前一直使用的是加拿大Applanix POS系统,由于美国的禁运政策,向中国出口的POS系统都进行了许多修改,性能明显下降,并且伴随不稳定的情况。为了保证激光雷达性能的可靠性,徕卡在2004年后测试了许多不同公司(包括Honeywell)的POS系统。在2005年7月又从加拿大TerraMatics公司(1998年成立)购买了其POS系统的IP(知识产权),避开北美区域,由自己(在瑞士)来研发和委托生产型号为iPAS 的POS系统。目前国内所销售的徕卡的ALS50-ii和60系统基本都是配置iPAS定位系统。
探地雷达成像算法研究 摘要 探地雷达(Ground Penetrating Radar,简称GPR)集无损检测、穿透能力强、分辨率高等众多优点而成为检测和识别地下目标的一种有效技术手段。性能优良的探地雷达成像方法有助于精确定位地下目标,同时提高对目标的检测和识别能力,从而推动探地雷达在城市质量监控、地质灾害、考古挖掘、高速公路无损检测、地雷探测等各个方面得到更广泛的应用。 本文以中国电波传播研究所的探地雷达LD-2000为实验设备,从中读取探测数据。以MATLAB为软件平台,实现了探地雷达数据的显示、处理、成像几个部分。其中数据显示方式包括数据的波形堆积图,剖面面色阶图以及带数据波形图;数据处理部分包括直达波的去除、背景噪声的去除、振幅增益等;雷达成像算法部分主要采用波前成像算法和投影层析成像算法。
Imaging Algorithm of Ground Penetrating Radar ABSTRACT GPR (Ground Penetrating Radar, referred GPR) set of non-destructive testing, penetration ability, many advantages of high resolution detection and identification of underground and become the target of an effective technical means. Excellent performance GPR imaging approach helps pinpoint underground targets, while increasing the target detection and identification capabilities, thereby promoting the quality of ground penetrating radar surveillance in the city, geological disasters, archaeological excavation, highway nondestructive testing, mine detection, etc. aspects to be more widely used. In this paper, China Institute of Radiowave Propagation GPR LD-2000 for the experimental apparatus, reads probe data. MATLAB as the software platform to achieve a ground-penetrating radar data display, processing, imaging several parts. Wherein the data includes a data waveform display stacked, with a cross-sectional side view and a gradation data waveform; data processing section includes the removal of the direct wave, the background noise removal, the amplitude gain, etc.; radar imaging algorithm some of the major imaging algorithm and the wavefront projection tomography algorithms.
基于三维激光雷达技术的大比例尺地形图解决方案 一激光雷达技术 1.1 综述 激光雷达测量技术(LiDAR)是当今测绘业界先进的遥感测量手段,是继GPS空间定位系统之后又一项测绘技术新突破。自20世纪60年代末世界第一部激光雷达诞生以来,激光雷达技术作为一种重要的航空遥感技术,与成像光谱、成像雷达共同被誉为对地观测三大核心技术。迄今为止,激光雷达的研究与应用均取得了相当大的进展,已成为航空遥感领域主流之一,其应用已超出传统测量、遥感以及近景测量所覆盖的范围,成为一种独特的数据获取方式。LIDAR技术具有高精度、高分辨率、高自动化且高效率的优势,集激光扫描、全球定位系统和惯性导航系统技术于一身,同时配备高分辨率数码相机,可实现对目标的同步测量,生成高密度激光点云数据,已成为世界各国进行大面积地表数据采集的重要主流与趋势。与传统摄影测量技术相比,激光雷达技术生成三维信息更快、更准确,特别能穿透地表覆盖的森林植被快速获取地形信息的能力,具有其他技术无可比拟的优势。采用激光雷达技术获取地面及其覆盖物(植被、电力线等)的精确三维坐标,生成高精度地形信息,可作为土地利用、工程建设规划、城市管理、河海地形、水库大坝、山坡检测、防灾、矿业、农业、林业、公共管理等方面数字化、自动化等应用基础。 1.2 激光雷达技术基本原理 激光雷达是一种有效的主动遥感技术,通过发射激光脉冲及精准的量测回波所经过的时间计算传感器与目标物之间的距离,再结合飞行器姿态信息、位置信息进行相关解算和坐 .下载可编辑.
标转换可以得到高精度的三维数据。机载激光雷达系统主要由飞行平台、激光测距系统、全球定位系统(GPS)、惯性导航系统(INS)以及相关的控制存储单元组成。 激光测距系统是激光雷达的核心组成部分,通过发射、接收激光信号可以精确测量发射器和目标物的距离。激光测距一般采用方式:脉冲测距和连续波的相位差测距。连续波激光器市场上较为少见,因此现有的激光雷达系统多采用脉冲测距的方式。通过激光器发射一束窄脉冲,与目标物接触后产生反射,并通过接收器接收回波信号。由于脉冲的速度已知(光速),接收器可以精确测量脉冲发射到接收到反射信号的时间,从而获得目标物与激光器的距离,其测量精度常常可以达到毫米级。 随着激光雷达技术的发展,激光雷达的飞行平台可以根据需要和实际作业条件进行多种选择,目前常见的搭载平台有小型飞机、固定翼飞机、直升飞机、无人机、动力三角翼、无人飞艇等。 激光雷达系统工作原 .下载可编辑.
激光主动成像制导雷达的研究方向 刘立宝1 蔡喜平2 乔立杰2 杨 洋2 (哈尔滨工业大学威海分校理学系1 威海 264209) (哈尔滨工业大学应用物理系2 哈尔滨 150001) 文摘:文中介绍了国外制导用激光成像雷达近年来的发展情况,总结提出了激光主动成像制导雷达的研究方向。CO2激光成像雷达系统效率高,大气传输性能好,信息处理技术成熟,易于实现高灵敏度外差探测和三维成像,曾经是主要的研究对象;固体激光雷达系统具有系统质量轻、价格低,探测器不需要制冷的独特优点正成为现在研究热点;二极管激光成像雷达体积小、造价低、寿命长、可靠性高、功耗低,可采用室温探测,有着很大的发展前途。 关键词: 激光雷达 成像 制导 R esearch of active im aging guiding lidar system Liu Libao1 Cai Xiping2 Qiao Lijie2 Yang Yang2 (Department of Science,Weihai Campus,Harbin Institute of Technology1, Weihai, China, 264209) (Department of Applied Physics,Harbin Institute of Technology2, Harbin, China, 150001) Abstract:In this paper,the latest development of imaging guiding lidar overseas is introduced, and the future of that is predicted.The CO2lidar system has the advantages of higher efficiency,bet2 ter transmission capability in air,more developed information processing technology,easy to actualize the coherent detection with high sensitivity,and3D imaging,so it has been the main object for study2 ing.For the special excellence of light weight,lower price,and detector without cooling,the solid imaging lidar system is now being a hot spot of research.With well outlook,the diode lidar system has got more characteristics than the systems before. K eyw ords: Lidar Imaging Guidance 1999206224收稿 1999212220修回作者简介:刘立宝 男 31岁 讲师 从事光学成像研究及教学工作。 第29卷第2期 红外与激光工程 2000年4月Vol.29No.2 Infrared and Laser Engineering A pr.2000
本技术公开了一种基于MATLAB的二维探地雷达三维成像方法,包括以下步骤:S1、对二维探地雷达进行组装和调试;S2、对采集路线中的各条车道进行数据采集;S3、三维成像模型建立;S4、对三维成像模型进行外观优化和尺寸调整;S5、三维数据导出;S6、数据格式转换;S7、三维反射电压数据模拟;S8、对最大及最小值的颜色进行设定;S9、将三维数据导入三维成像模型,得到三维成像;S10、对异常位置进行切片化显示,直观地显示出道路深层病害。本技术通过三维模型的建立与优化,形成能够容纳三维雷达数据的成像模型,在将模拟的三维数据导入后,实现三维雷达成像,并具备图像切割功能,以便观察道路内部异常图像。 权利要求书 1.一种基于MATLAB的二维探地雷达三维成像方法,其特征在于,该方法包括以下步骤: S1、准备工作:对二维探地雷达进行组装和调试,将其安装在雷达车上,确认进行数据采集的路段和采集时间,并制定数据采集计划; S2、数据采集:通过雷达车按照采集计划中的采集路线,对采集路线中的各条车道进行数据采集,为让雷达车按直线行驶,在采集左轮迹带时,将左轮轧在车道左标线上;在采集右轮迹带时,将右轮轧在车道右标线上;通过二维探地雷达配套数据处理软件Pavecheck对数据进行数据完整性检查; S3、三维成像模型建立:通过生成超立方体定义域中的数据点矩阵的方法,在MATLAB中建立用于存储三维数据的三维矩阵,作为三维成像模型;S4、模型优化:对三维成像模型进行外观优化和尺寸调整,使其符合道路外形; S5、三维数据导出:通过二维探地雷达配套数据处理软件Pavecheck对数据进行导出; S6、数据格式转换:对导出的数据进行格式转换,转换为MATLAB中三维成像模型能够识别的Excel格式数据; S7、三维反射电压数据模拟:目前采集到的单车道测线为3条,将两条测线间的数据进行线性扩充模拟,每两条测线间的数据扩充4组,提高其分辨率; S8、颜色设定:对最大及最小值的颜色进行设定;
激光雷达在军事中的应用 摘要:本文简要介绍激光雷达的特点、激光雷达探测的基本物理原理及其在军事领域的应用现状.Laser rader’s character was briefly introduced in this essay.Besides,its elementary physical fundamental was also introduced as well al its use from military field. 关键词:激光雷达;探测;军事应用 1引言 激光雷达是现代激光技术与传统雷达技术相结合的产物,由发射机、天线、接收机、跟踪架及信息处理等部分组成。发射机是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器半导体激光器及波长可调谐的固体激光器等;天线是光学望远镜;接收机采用各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等。激光雷达采用脉冲或连续波2种工作方式即为直接探测和外差探测。它像传统的微波雷达一样,由雷达向目标发射波束,然后接收目标反射回来的信号,并将其与发射信号对比,获得目标的距离、速度以及姿态等参数.但是它又不同于传统的微波雷达,它发射的不是微波束,而是激光束,使激光雷达具有不同于普通微波雷达的特点. 根据激光器的不同,激光雷达可工作在红外光谱、可见光谱和紫外光谱的波段上.相对于工作在米波至毫米波波段的微波雷达而言,激光雷达的工作波长短,是微波雷达的万分之一到千分之一,根据光学仪器的分辨率与波长成反比的原理,利用激光雷达可以获得极高的角分辨率和距离分辨率,通常角分辨率不低于0.1mrad ,距离分辨率可达0.1m , 利用多普勒效应可以获得10m / s 以内的速度分辨率.这些指标是一般微波雷达难以达到的,因此激光雷达可获得比微波雷达清晰得多的目标图像。 激光束的方向性好、能量集中,在20km 外,其光束也只有茶杯口大小,因而敌方难以截获,而且激光束的抗电磁干扰能力强,难以受到敌方有源干扰的影响. 由于各种地物回波影响,因而在低空存在微波雷达无法探测的盲区.而对于激光雷达,只有被激光照射的目标才能产生反射,不存在低空地物回波的影响,所以激光雷达的低空探测性能好.激光雷达体积小、重量轻,有的整套激光雷达系统的重量仅几十千克.例如为了适应海军陆战队的需要,美国桑迪亚国家实验室和伯恩斯公司都提出了手持激光雷达的设计方案.相对于重达数吨、乃至数十吨的微波雷达而言,激光雷达的机动性能显然要好得多. 任何事物都是一分为二的,激光雷达也有自身的缺陷.激光光束窄、方向性好,虽然表现出能量集中的优点,但不宜用作战场监视雷达搜索大空域.而且激光的传输受环境影响大,尤其是在雨、雪、雾的天气,激光在传输过程中的衰减更大.当然,激光在大气层外传输时不易衰减,有其得天独厚的优势.经过几十年的努力,科学家们趋利避害,已研制出多种类型的军用激光雷达.激光雷达在军事上可用于对各种飞行目标轨迹的测量。如对导弹对卫星的精密定轨等。激光雷达与红外、电视等光电设备相结合,组成地面、舰载和机载的火力控制系统对目标进行搜索、识别、跟踪和测量。由于激光雷达可以获取目标的三维图像及速度信息,有利于识别隐身目标。激光雷达可以对大气进行监测,遥测大气中的污染和毒剂,还可测量大气的温度、湿度、风速、能见度及云层高度。用激激光器作为辐射源的雷达。 2. 用干战场侦察的激光雷达 众所周知,普通的成像技术(如电视摄像、航空摄影及红外成像等)获得的场景图像都是反映被摄区域辐射强度几何分布的图像,而激光雷达可以通过采集方位角一俯冲角一距离一速度一强度等三维数据,再将这些数据以图像的形式显示出来,从而可产生极高分辨率的辐射强度几何图像、距离图像、速度图像等,因而它提供了普通成像技术所不能提供的信息. 例如美国桑迪亚国家实验库研制的一种激光雷达,激光器功率为120MW ,显示屏幕的像素为64
机载激光雷达数据处理 编制:深圳飞马机器人科技有限公司版本号:V0.1 日期:2019-3-22
版权声明 本文档版权由深圳飞马机器人科技有限公司所有。任何形式的拷贝或部分拷贝都是不允许的,除非是出于有保护的评价目的。 本文档由深圳飞马机器人科技有限公司提供。此信息只用于软件业务项目管理的成员或咨询专家。特别指出的是,本文档的内容在没有得到深圳飞马机器人科技有限公书面允许的情况下不能把全部或部分泄露给任何其它单位。
目录 机载激光雷达数据处理 (1) 1.概述 (5) 2.软件准备 (5) 3.数据整理 (6) 3.1.GPS数据 (6) 3.2.LIDAR原始数据 (7) 3.3.影像数据...........................................错误!未定义书签。 3.4.数据整理与存放..............................错误!未定义书签。 4.差分解算 (7) 4.1.GPS数据格式转换 (7) 4.2.影像POS数据处理..........................错误!未定义书签。 4.3.点云轨迹解算 (10) 5.影像数据处理..............................................错误!未定义书签。 6.点云数据预处理 (26) 6.1.新建项目 (26) 6.2.点云解算 (30) 6.3.数据检核 (31) 6.4.特征提取 (33) 6.5.航带平差 (34) 6.6.点云赋色 (35)
6.7.坐标转换 (36) 6.8.点云标准格式(LAS)导出 (38) 7.点云数据后处理 (39) 7.1.数据分块 (39) 7.2.噪声点滤除 (40) 7.3.分类编辑 (41) 7.4.DEM输出 (44) 7.5.EPS采集DLG (45) 7.6.基于点云采集DLG (51) 8.成果精度检查与汇交 (57) 8.1.点云精度检查 (58) 8.2.成果提交(只列出点云成果,不含影像) (58)
机载激光雷达的应用现状及发展趋势 摘要:机载激光雷达是一种应用越来越广泛的对地观测系统,本文简要介绍了机载LIDAR系统及其测量原理,并重点综述了机载LIDAR的应用现状最后对其发展趋势进行了展望。 关键字:激光;激光器;激光技术;激光雷达 一、机载LIDAR的技术原理 机载激光雷达(Light Detection And Ranging,LIDAR)是将激光用于回波测距和定向,并通过位置、径向速度计物体反射特性等信息来识别目标。它体现了特殊的发射、扫描、接收和信号处理技术。机载激光雷达技术起源于传统的工程测量中的激光测距技术,是传统雷达技术与现代激光技术结合的产物,是遥感测量领域的一门新兴技术。 自20世纪60年代末世界第一部激光雷达诞生以来,机载激光雷达技术作为一种重要的航空遥感技术,已经被越来越多的学者所关注。迄今为止,机载激光雷达的研究与应用均取得了相当大的进展,虽然机载激光雷达无法完全取代传统的航空摄影测量作业方式,但可以预见,在未来的航空遥感领域,机载激光雷达将成为主流之一。进入90年代,机载激光雷达系统进入实用化阶段,并成为雷达遥感发展的重要方向之一。机载LIDAR系统是一款高速度、高性能、长距离的航空测量设备,该系统由激光测高仪、GPS定位装置、IMU(惯性制导仪)和高分辨率数码照相机组成,实习对目标的同步测量。测量数据通过特定方程解算处理,生成高密度激光点云数值,为地形信息的提取提供精确的数据源。其应用已超出传统测量,遥感,以及近景测量所覆盖的范围,成为一种独特的数据获取方式。 与普通光波相比,激光具有方向性好、单色性好、相干性好等特点,不易受大气环境和太阳光线的影响。使用激光进行距离测量可大大提高了数据采集的可靠性抗干扰能力。当来自激光器的激光射到一个物体的表面时,只要不存在方向反射,总会有一部分光会反射回去,成为回波信号,被系统的接收器所接收,当仪器计算出光由激光器射出返回到接收器的时间为2t后,那么,激光器到反射物体的距离d=光速c×t\2 。 在机载激光雷达系统中,利用惯性导航系统获得飞行过程中的3个方位角 (ψωκ),通过全球定位系统(GPS)获取激光扫描仪中心坐标(x y z),最后利用激光扫描仪获取到激光扫描仪中心至地面点的距离D,由此可以计算出此刻地面上相应激光点(X Y Z)的空间坐标。 假设三维空间中一点的坐标已知,求出改点到地面上某一待定点P(XYZ)的向量,则P点的坐标就可以由加得到。其中点为遥感器的投影中心,其坐标可利用动态差分GPS求出,向量的模是由激光测距系统测定的机载激光测距仪的投影中心到地面激光脚点间的距离,姿态参数可以利用高精度姿态测量装置(INS)进行测量获得的。 利用机载LIDAR系统进行测高作业,根据不同的航高作业,根据不同的航高,其平面精度可以达到0.15至1米,高程精度可达10cm至30cm,地面分辨率甚至可达到厘米级。可以说,机载LIDAR系统是为综合航射影像和空中数据定位二设计的新技术
机载激光雷达航测技术 机载三维激光雷达测量系统是一种主动航空遥感装置,是实现地面三维坐标和影像数据同步、快速、高精确获取,并快速、智能化实现地物三维实时、变化、真实形态特性再现的一种国际领先的测绘高新技术。该技术基于激光测距、GPS定位、惯导测量、及航空摄影测量原理,可以快速、低成本、高精度地获取三维地形地貌、航空数码影像等空间地理信息数据。 激光雷达工作原理图 1、机载激光雷达设备 机载激光雷达测量系统设备主要包括三大部件:机载激光扫描仪、航空数码相机、定向定位系统POS(包括全球定位系统GPS和惯性导航仪IMU)。其中机载激光扫描仪部件采集三维激光点云数据,测量地形同时记录回波强度及波形;航空数码相机部件拍摄采集航空影像数据;POS系统部件测量设备在每一瞬间的空间位置与姿态,其中GPS确定空间位置,IMU
惯导测量仰俯角、侧滚角和航向角数据。 机载激光雷达设备主要构成 天宝公司Harrier 68i是当今世界最强性能水平的全新一代机载三维激光雷达系统之一,在系统稳定性、硬件性能指标、软件配套等方面领先于其它同类产品。 Harrier 68i机载激光雷达测量系统 该设备具有以下特点: 能够接收无穷次回波的全波形数据 最大脉冲频率可高达40万赫兹 距离精度最高可为±2 cm 实现与GPS、INS、数码相机等设备无缝结合
符合激光安全标准,允许在任何高度进行安全操作 IMU惯导仪的采样频率高达200Hz 集成高精度航空数码相机,像素为6000万 2、生产流程 机载激光雷达航测作业的生产环节,主要包括航飞权申请、航摄设计、航摄数据采集、数据预处理、激光数据分类、数字高程模型(DEM)制作、数字正射影像(DOM)制作、建筑物三维白模生产等环节。 机载激光雷达航测工作流程 1)航摄准备。 该阶段除需进行项目所需资料的收集以及人员和设备的配备保障等各项项目准备工作外,最主要的工作是按相关规定和流程申请获得项目测区的
机载激光雷达测深技术及应用 海底地形是海洋基础测绘要获取的重要地理空间信息之一,在国民经济建设、海洋权益维护、国防建设和科学研究中具有重要的作用。人们通过对声、光、电、磁长期的研究后发现,声波在海水中具有光、电、磁无法比拟的优越性。迄今为止,人们所熟知的水中的各种能量辐射形式中,以声波的传播性能为最好。正是由于声波在海水中衰减小、传播距离长,因而最适合于水深测量。因此,基于声波的回声测深技术是应用最广最为成熟的水深测量技术,其中最为典型的测深设备是单波束测深仪和多波束测深系统。尤其是多波束测深系统以其高效率全覆盖的优势在水深测量中得到了越来越普遍的应用。一般而言,多波束测深系统的波束在海底的覆盖宽度是水深的 3 ~7 倍,个别系统最大可达10 倍。然而,即使是多波束测深系统具有如此之宽的覆盖测幅,在浅水区的全覆盖测量效率也是非常低的。 自从人们发现光波在海水中的最佳透光窗口后,机载激光测深技术得到了迅速的发展。美国、俄罗斯、澳大利亚、加拿大、瑞典、中国等都先后对机载激光测深技术进行了研究。其中最为成熟的机载激光测深系统是加拿大的 SHOALS 系列产品(现已升级为CZMIL) 和瑞 典的 HAWKEYE 系列产品。 机载激光测深技术是集激光、全球定位与导航、自动控制、航空、计算机等前沿技术,以直升机和固定翼飞机为平台,从空中向海面发射激光束来测量水深的海洋高新技术,属于 主动测深系统,在浅于 50m 的沿岸水域,具有无可比拟的优越性。特别是能够高效快速测 量浅海、岛礁、暗礁及船只无法安全到达的水域。其主要优点如下:( 1) 覆盖宽度不受水 深的影响,而仅仅与飞机航高和激光测深系统的宽高比有关,这一显著特点是多波束测深系 统所不具备的;( 2) 飞机速度远远快于船速,因此,机载激光测深系 统具有很好的机动性和非常高的测深效率;( 3) 机载激光测深系统目前已具有水部和 陆部同时测量的功能,即在岸线附近,测量水深的同时,还可以测量岸线附近的地形。 一、激光测深原理 机载激光测深技术是一种主动式测量技术,利用了光在海洋中传播特性。海水组成成分复杂,包括可溶有机物、无机盐、悬浮泥沙和浮游生物,这些物质对光有一定的吸收和散射作用。1963 年,Duntley S Q 和 Gilbert G D 等人在研究光波在海水中传播规律时,发现0.47-0.58 m 波段内的蓝绿光在海水中传播时衰减程度比其它波段小很多,证实了海洋中存在一个类似于大气的透光窗口。机载激光正是利用了蓝绿光在海水中传播衰减小的特性。 机载激光水下目标探测的基本原理和回声测深原理相似。机载激光雷达采用激光 器同时发射红外激光(波长 1046 μm)和蓝绿激光(波长 532 μm)。红外激光到达海面 后 反射,被激光接收器接收;而蓝绿激光由于传播衰减小到达海底后散射,被激光
激光雷达原理 -------读书笔记 99121-19 邓洪川 一.概念: “雷达”(Radio Detection and Range,Radar)是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。 传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图 微波雷达 激光雷达 激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。 目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种: (1)按激光波段分,有紫外激光雷达、可见激光雷达和红外激光雷达。 (2)按激光介质分,有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵 浦固体激光雷达等。 (3)按激光发射波形分,有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
(4) 按显示方式分,有模拟或数字显示激光雷达和成像激光雷达。 (5) 按运载平台分,有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光 雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。 (6) 按功能分,有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像 雷达,激光目标指示器和生物激光雷达等。 (7) 按用途分,有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多 功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。 激光雷达的波长比微波断好几个数量级,又有更窄的波束。因此,于微波雷达相比,激光雷达具有如下优点: (1) 角分辨率高,速度分辨率高和距离分辨率高。采用距离-多普勒成像技术可 以得到运动目标的高分辨率的清晰图象。 (2) 抗干扰能力强,隐蔽性好;激光不受无线电波干扰,能穿越等离子鞘,低 仰角工作时,对地面多路径效率不敏感。激光束很窄,只有在被照射的那一点,那瞬间,才能被接收,所以激光雷达发射的激光被截获的概率很低。 (3) 激光雷达的波长短,可以在分子量级上对目标探测。这是微波雷达无能为 力的。 (4) 在功能相同的情况下,比微波雷达体积小,重量轻。 当然,激光雷达也有如下缺点: (1) 激光受大气及气象影响大。大气衰减和恶劣天气使作用距离降低。此外, 大气湍流会降低激光雷达的测量精度。 (2) 激光束窄,难以搜索目标和捕获目标。一般先有其他设备实施大空域、 快速粗捕目标,然后交由激光雷达对目标进行精密跟踪测量。 二.激光雷达作用距离方程 激光和微波统属电磁波,激光雷达作用距离方程的推导与微波雷达的推导是相似的。从微波雷达作用距离方程可以导出激光雷达方程: Sys Atm T T R D R R G P P ηηππδπ???=4442 2 2 式中,P R 是接收激光功率(W );P T 发射激光功率(W );G T 是发射天线增益;σ是目标散 射截面;D 是接收孔径(m );R 是激光雷达达到目标的距离(m );ηAtm 是单程大气传输系数;ηSys 是激光雷达的光学系统的传输系数。定义A R =πD 2是有效接收面积(m 2).式中还有: 24T T G θ π = 其中 D K a T λ θ= 两式中,θT 是发射激光的带宽;λ是发射激光的波长;K a 是孔径透光常数。 经过整理,式(1)变为
机载激光雷达系统在测绘领域的应用 摘要:本文通过对国内外机载激光雷达的发展现状进行了分析,结合本单位激光雷达的实际应用和其特点,介绍了其在测绘等行业的应用,阐述了其对测绘领域带来的巨大变革和广阔前景。 关键词:4D测绘产品机载激光雷达激光点云 机载激光雷达系统(Light Detection And Ranging,简称LIDAR)是集全球定位系统(GPS)、惯性导航系统(IMU)、激光扫描系统、航空摄影系统的快速测量系统。它能够大面积、高分辨率、快速准确地获取地表各类地理信息,可实时快速获取高精度点云数据、数字地面模型(DTM)、数字表面模型(DSM)以及测区高程等数据成果。被测绘界认为是继全球定位系统(GPS)之后的重大技术革命,是当前测绘科技发展的国际前沿。 本文结合作者单位拥有的徕卡公司最新的ALS60机载激光雷达系统系统在测绘生产领域多个项目的实际应用情况,介绍了其对测绘领域带来的巨大变革和广阔前景。 国内外机载激光雷达的发展现状 机载激光雷达测量技术发展已经有二十余年的历史,从早期的美国宇宙航天激光测距到德国诞生的世界上第一个商用样机激光断面测量系统,发展到近些年来随着当今科技技术日新月异的进步,激光雷达系统更是得到了迅猛的发展,其在测绘市场的市场份额逐年快速增长。目前,全球已经有众多的商用系统在使用,如TopScan、Optech、Top Eye、Saab、Fli-map 、TopoSys、Hawk2Eye 等多种实用系统。具有代表性的系统主要有:德国IGI和奥地利RIGEL公司联合制的Lite Maper6800,美国alpha的SHOLAS和加拿大OPTECH的ALTM3100T,德国TopoSys的Falcon,以及美国Leica公司的Leica ALS50/60等。 上世纪90年代中后期至今,美国、德国、加拿大等国家,先后成功应用这项技术进行了地形测量、森林资源调查与评估、三维城市建模等试验与工程实践。特别是在芬兰和德国的应用更为广泛。 国内在地面三维激光扫描系统、车载激光雷达系统方面已有相关产品投入实际生产应用。但在机载激光雷达技术的硬件研究制造上国内外差距较大,现有技术基础比较薄弱。虽有原理样机的研制,但距实用化尤其是形成产品尚有一段距离。所以至今国内还没有成熟的机载激光雷达系统出现。 机载激光雷达在测绘等领域的应用 1. 机载激光雷达测量技术主要特点和性能
Computer Science and Application 计算机科学与应用, 2019, 9(6), 1169-1182 Published Online June 2019 in Hans. https://www.360docs.net/doc/e318508043.html,/journal/csa https://https://www.360docs.net/doc/e318508043.html,/10.12677/csa.2019.96132 Combine Laser Scan Data with Open Street Map to Produce a Three-Dimensional Road Map Chenjing Ding, Xingqun Zhao School of Biological and Medical Engineering, Southeast University, Nanjing Jiangsu Received: Jun. 7th, 2019; accepted: Jun. 21st, 2019; published: Jun. 28th, 2019 Abstract With the continuous development of computer technology, the method to acquire spatial data has updated rapidly. Three-dimensional digital map attracts so much attention to be developed. Gene-rating a three-dimensional digital map requires a basic map. Because the Open Street Map (OSM) is open-source and free, it has received widespread attention. However, the height information of the road is very sparse in the OSM, and the mean square error is higher than 5 meters, which makes more and more researchers focus on the generation of high-precision three-dimensional maps. Due to the Light Detection and Ranging (LiDAR) point cloud’s high-precision characteristics whose average square error is about 20 cm, it can extend the OSM to generate high-precision 3D maps. This paper studies the method of OSM combined with LiDAR point cloud to generate a three-dimensional digital map. Due to the sampling characteristics of the airborne LiDAR used in the overhead view, the oc-cluded area cannot be sampled. The method proposed in this paper can solve the challenge of occlu-sion. It is composed of 3 main parts: 1) dealing with indoor area; 2) handling with outdoor area; 3) applied Weighted Hough Transform (WHT) for recalculation. The main steps for dealing with indoor area are as follows: 1) The three-dimensional road surface is projected into a two-dimensional line by orthogonal projection. 2) To find a set of road candidate points, the line is fitted by Hough Transform (HT). 3) Random Sampling the Uniform Sample Consensus (RANSAC) combined with the least squares method (LSM) is used to fit the road plane according to the obtained set of candidate points. This pa-per proposes a method for estimating the height of an indoor road using the height of the associated outdoor channel which is added up with different weights according to their projection distance. For the road with abnormal slope, the Weighted Hough Transform (WHT) is used for recalculation. This paper uses the airborne lidar point cloud (root mean square error is about 20 cm) provided by the municipal government of Cologne, Germany, to establish a three-dimensional road map for the city of Aachen. The results show that compared with the Ordering Points to Identify The Clustering Structure (OPTICS) algorithm, PHT successfully predicts 87% of the scenarios, which is greater than the 13% success rate of the OPTICS algorithm. In conclusion, the accuracy of the PHT algorithm is higher. In addition, PHT is more robust to the occlusion problem, change of point cloud density and the interfe-rence of noise points. Keywords 3D Reconstruction, Lidar, Hough Transform, 3D Map