穿墙雷达成像中墙体回波抑制
雷达成像技术(保铮word版)第六章 合成孔径雷达运动补偿
第六章合成孔径雷达运动补偿 机载SAR运动补偿可分为实时运动补偿和成像处理运动补偿。实时运动补偿就是利用飞机上的惯性导航设备和运动传感器测出飞机的姿态和速度变化,对雷达参数进行实时调整,根据飞机姿态变化调整天线波束指向,根据飞机速度调整脉冲重复频率,消除不均匀采样误差,根据天线相位中心到场景中心线的距离,调整快时间采样起始时刻。实时运动补偿能消除部分运动误差,但要实现高分辨率成像,还需要在成像处理中进行精确的运动补偿,成像处理运动补偿可又分为两类,一是基于运动传感器的运动补偿,二是基于雷达高分辨回波数据的运动补偿。成像处理运动补偿中,基于回波数据的运动补偿本质上和基于运动传感器的运动补偿相同,只不过运动参数(主要是多普勒中心和调频率参数)是通过回波数据估计得到。 由载机引起的合成孔径阵列误差主要可分为沿着航向的误差和垂直航向的误差,下面分别讨论对它们的运动补偿。 6.1 垂直航线运动分量的补偿 由大气扰动引起的运动误差的补偿是机载SAR系统中一个关键问题。在SAR成像系统中因运动误差而引起的主要影响表现有:空间和辐射分辨率的下降,方位模糊,几何和相位失真。 运动误差通常可用捷连惯导单元(IMU)和惯性导航系统(INS)测得。对从IMU或INS的加速度计和陀螺仪获得的数据进行处理可以重构出飞机的三维运动轨迹(即沿航向,垂直航向,天顶方向),同时也可得到IMU位置的三个角度分量(即偏航角,俯仰角,滚转角)。由于我们关心的是天线相位中的运动误差,所以需要知道IMU和天线中心位置之间的距离,以便将IMU位置的运动信息换算到相位中心位置,同时需要将惯导系统与全球定位系统相结合,把相位位置转变为绝对位置。由于从惯导系统得来的运动参数常常受到系统误差(例如,加速度计的积分引起的偏差)的影响,通过从SAR数据中估计可进一步提高运动参数的精度。 下面,我们先分析SAR处理中的运动误差对成像的影响。我们假设机载SAR
激光雷达回波信号仿真模拟
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
雷达图像 处理
与光学图像相比,SAR图像视觉可读性较差,并且受到相干斑噪声及阴影、透视收缩、迎坡缩短、顶底倒置等几何特征的影响。因此对SAR雷达图像的图像增强与边缘检测将有别于一般的光学图像。 首先,图像增强技术是指按特定的需要突出一幅图像中的某些信息,同时削弱或去除某些不需要的信息,它是一种将原来不清晰的图像变得清晰或强调某些感兴趣的特征,抑制不感兴趣的特征,使之改善图像质量,丰富信息量,加强图像判读和识别效果的图像处理方法。从纯技术上讲,图像技术分为频域处理法和空域处理法。 空域图像增强是直接对图像中的像素进行处理,基本上是以灰度影射变化为基础的,所用的影射变换取决于增强的目的。具体来说,空域法包括点运算和模板处理,其中点运算时针对每个像素点进行处理的,与周围的像素点无关。空域增强方法大致分为3种,它们分别是用于扩展对比度的灰度变换、清除噪声的各种平滑方法和增强边缘的各种锐化技术。灰度变换主要利用点运算来修改图像像素的灰度,是一种基于图像变换的操作;而平滑和锐化都是利用模板来修改像素灰度,是基于图像滤波的操作。 频域处理法的基础是卷积定理。传统的频域法是将需要增强的图像进行傅里叶变换或者离散余弦变换,或者是小波变换,然后将其与一个转移函数相乘,再将结果进行反变换得到增强的图像。 在空域图像增强中,形态学的基本思想是使用具有一定形态的结构元素度量和提取图像中的对应形状,从而达到图像进行分析和识别的目的,利用不同的数学形态学变换滤波方法在对S AR图像直接进行平滑滤波的应用中取得较好的结果。算法简单,物理意义明显。 形态学的基本思想是使用具有一定形态的结构元素度量和提取图像中的对应形状,从而达到图像进行分析和识别的目的。由于形态学算子实质上是表达物体或形状的集合与结构元素之间的相互作用,结构元素的形态就决定了这种运算所提取的信号的形态信息。因此数学形态学对信号的处理具有直观上的简单性和数学上的严谨性,在描述信号形态特征上具有独特的优势。同时,形态学中的形态滤波器可借助于先验的几何特征信息,利用形态学算子有效地滤除噪声,又保留图像中的原有信息。因此在图像平滑滤波、分割、识别、形状描述等方面得到了广泛的应用,它最显著的特点是直接处理图像表面的几何形状,具有快速、健壮和精确的特性。 本文将开运算和闭运算的另外一种组合方法——交替顺序滤波运用到s AR图像增强处理中。它是用一系列不断增大的结构元素来执行开闭滤波。具体过程如下:本文开始使用的是一个2 ×2较小的结构元素,然后增加其大小,直到其大小与获得单个开闭滤波器最佳效果所用的3 ×3结构元素的大小相同为止。 在频域图像增强中,小波变换的时域与频域是具有多分辨率的时频分析方法,我们可以利用它的这个特性来对信号做高通滤波和低通滤波,得到原始信号的逼近信号和细节信号。对一幅图像sar进行基于小波变换的增强处理,主要步骤:1、对图像用mallat快速算法进行小波分解;2、选取增强系数;3、对处理后的小波系数进行小波逆变换,得到增强图像。多尺度积用于图像边缘检测。但小波变换各向同性的性质导致方向选择性差,不能有效地捕捉轮廓信息。 其次图像边缘检测边缘的种类分为两种,一种为阶跃性边缘,它两边的像素的灰度值有着显著的不同;另一种成为屋顶状边缘,它位于灰度值从增加到减少的变化转折点。边缘特征提取的常用方法有Sobel算子和Cannny算子,其中canny算子对高斯加性噪声有一定的抑制作用,提取的边缘方向和位置信息比较准确,但是SAR的噪声为Gamma分布的乘性噪声,
雷达成像技术(保铮word版)第四章 合成孔径雷达
第四章 合成孔径雷达 合成孔径雷达(Synthetic Aperture Radar ,简称SAR )是成像雷达中应用最 多,也是本书讨论的重点。在前几章对雷达如何获取高的距离分辨率和横向分辨 的基础上,从本章开始用三章的篇幅对合成孔径雷达作较详细的讨论。 首先,结合工程实际介绍合成孔径雷达的原理。在前面的讨论中已经提到, 根据不同的要求,成像算法(特别是横向成像算法)有许多种,本章只介绍最简 单的距离-多普勒算法的原理,目的是由此联系到对合成孔径雷达系统的要求以 及工程实现方面的问题。 合成孔径雷达通常以场景作为观测对象,它与一般雷达有较大不同,我们将 在本章讨论合成孔径雷达有别于一般雷达的一些技术性能和参数。 4.1 条带式合成孔径雷达成像算法的基本原理 4.1所示,设X 轴为场景的中心 线,Q 为线上的某一点目标,载机以 高度H 平行于中心线飞行,离中心线 的最近距离B R 为 B R = (4.1) 当载机位于A 点时,它与Q 点的斜距 为 R = (4.2) 式中t X 为点目标Q 的横坐标。 当分析中心线上各个点目标的回波状况及成像算法时,可以在包括场景中心 线(即X 轴)和载机航线的平面里进行。至于场景里中心线外的情况将在后面 说明,这里暂不讨论。 一般合成孔径雷达发射线性调频(LFM )脉冲,由于载机运动使其到目标的 距离发生变化,任一点目标回波在慢时间域也近似为线性调频,而且包络时延也 几何示意图
随距离变化,即所谓距离徙动。合成孔径雷达成像算法的任务是从载机运动录取得到的快、慢时间域的回波数据,重建场景图像,它是二维匹配滤波问题。 严格考虑距离徙动的成像算法比较复杂,在实际应用中,一般均根据情况采用一些较简单的算法,这些将在第五章里系统介绍。在这里我们主要讨论分辨率较低,距离徙动影响可以忽略的最简单的情况,这时可采用简易的距离-多普勒基本算法。 所谓距离徙动的影响可以忽略不计是指雷达波束扫过某点目标的相干处理时间里,目标斜距变化引起的距离徙动值小于距离分辨单元长度的1/4~1/8,即场景中心线上所有点目标的回波(距离压缩后的)在慢时间域里均位于同一个距离单元。当然,因斜距改变引起的二次型相位变化还是需要考虑的,即系统的脉冲响应函数应考虑二次型相位。这种情况下的成像算法是比较简单的,可将回波信号先在快时间域作脉压匹配滤波,然后再对快时间域的每一个距离单元分别沿慢时间作方位压缩的匹配处理,于是得到场景的二维图像。在上面的图4.1中,我们提出只对中心线上的目标进行讨论,场景的二维图像当然包括场景里中心线以外的目标,这将在下一节里说明。 脉压匹配滤波可以在时域用回波数据与系统函数作卷积处理,也可以在频域作乘积处理,由于乘积的运算量小,同时时频域之间的傅里叶变换有FFT快速算法,频域计算用得更多。此外,由于场景有一定宽度,比发射脉冲宽度宽不少,而沿慢时间录取的数据长度一般也比波束扫过一个点目标的相干积累时间长得多,即时域信号长度比系统匹配函数长得多,这里应将信号分段处理后再加以拼接。 4.2合成孔径雷达回波的多普勒特性 信号有时域表示和频域表示,一般情况直接获取的是时域信号,通过傅里叶变换得到它的频谱。合成孔径雷达信号也是如此,快时间表示的发射信号是在时域生成,而慢时间回波则为载机运动过程中回波的变化序列。通过傅里叶变换,可以得到快时间频谱(距离谱)和慢时间频谱(多普勒谱或方位谱)。 合成孔径雷达信号有它的特殊性,它的回波为众多点目标回波的线性组合,而对一个点目标来说,其快、慢时间回波均为(或近似为)线性调频信号。对于
穿墙雷达简介
穿墙雷达技术简介 1.穿墙探测背景 针对穿透墙体非透明障碍物进行探测的典型应用问题: 现有常见的透视技术包括超声波传感器、红外线传感器、X射线传感器无法实现穿透墙体探测,主要原因如下: ●超声波传感器:易受噪声和温度影响,分层介质传播衰减严重,穿透性差。 ●红外线传感器:无法穿透非空气介质障碍物。 ●X射线传感器:有一定穿透性,对人体有伤害。 采用特定频率电磁波(微波频段)的穿墙雷达是解决穿墙探测问题的唯一可行技术。0.5GHz-3GHz电磁波对墙体具有很好地穿透性,同手机通信频段相似且功率更低不会伤害人体。 2.穿墙雷达 穿墙雷达采用特定频率电磁波实现对墙体、树木、草丛、烟雾等非透明介质障碍物的穿透探测,完成对障碍物后隐蔽人体的探测、定位、跟踪和识别。可穿透的墙体类型包括木板墙、石板墙、粘土砖墙、煤渣墙、混凝土墙、钢筋稀疏分布的混凝土墙等。
(1)用户需求/期望 ●人体实时定位: 实时准确地获取房间内部多个人体的位置信息,多个人体以任意状态分布于房间内任意空间位置。 ●人体状态识别: 实时准确地判断识别房间内部多个人体的状态信息,包括静止与运动状态识别、站立/坐/躺/蹲等静止状态识别、走动/晃动/跑动/跳动等运动状态识别。 ●人体特征识别: 实时准确地判断识别房间内部多个人体的特征信息,包括敌我识别(敌人/人质)、性别和身高等基本特征识别、战斗力和威胁度等附属特征识别。 综上所述,从用户需求/期望角度分析,穿墙雷达的理想目标为:移除墙体障碍,实时还原房间内部情况,实现墙体透视效果。(2)当前技术现状 根据国外已投入市场并实际应用的穿墙雷达产品,依托现有最先进的信号处理技术,穿墙雷达能够实现并被广泛认可的功能包括:
雷达成像技术
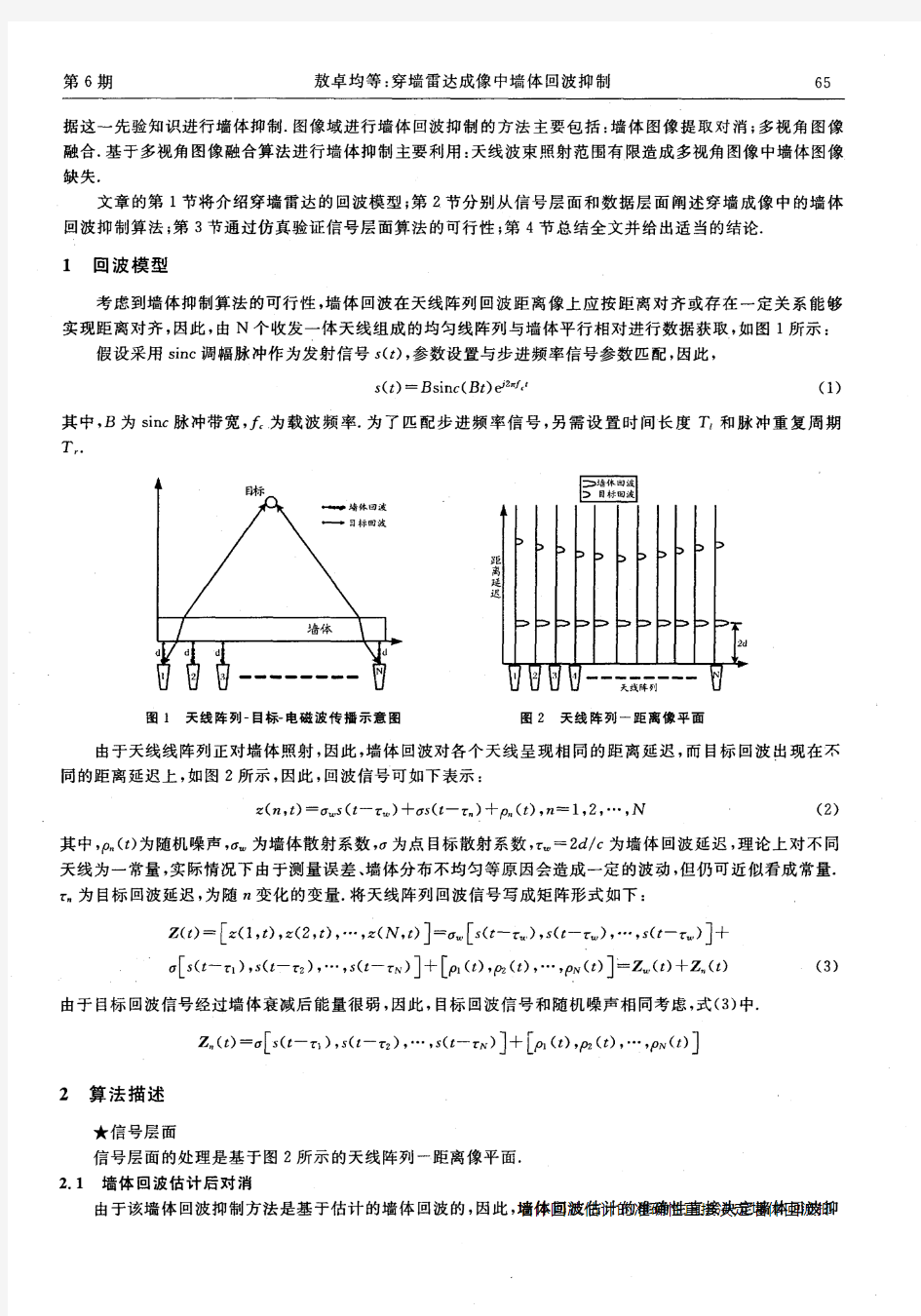
雷达成像技术实验报告 实验一 ——线性调频信号的匹配实验理论分析: 线性调频信号的一般表示形式为:s=exp(j*pi*k*t.^2),雷达发射信号脉冲线性调频信号,回波有一定的脉宽。雷达测距的分辨率受回波脉宽的影响,因此对接收信号进行脉冲压缩可以提高雷达测距分辨率。 脉冲压缩的思路是对接受信号做相关。对信号做相关,即使信号通过一匹配滤波器,匹配滤波器的冲激响应为s*(-t),系统传递函数S*(f) 。对于线性调频信号S(f)=exp(-j*pi*f.^2/k)。所以S*(f) =exp(j*pi*f.^2/k)。 可以有三种方法实现匹配滤波。 1.信号直接通过滤波器Hf=exp(j*pi*f.^2/k)。 2.对回波信号s(t)进行变换得到s*(-t),再将回波信号通过以s*(-t)为冲激响应的滤波器。 对回波信号s(t)进行变换得到S*(f),再将回波信号通过以S*(f)为系统传递函数的滤波器。 源程序: clear all Tu=10.e-6; Br=100.e6; fs=120.e6; ts=1/fs; kr=Br/Tu; N=round(fs*Tu); N=2^(round(log2(N))+1).*2; Tp=N/fs; t=(-Tp/2:ts:(Tp/2-ts))+14.e-6; s1=exp(j*pi*kr*(t-13.e-6).^2).*(abs(t-13.e-6) 雷达图像处理ENVI ENVI提供基本的雷达图像处理功能,包括雷达数据格式支持、雷达文件定标、消除天线增益畸变、斜距校正、入射角图像生成、斑点噪声压缩、合成彩色图像等。 多标准ENVI图像处理功能也可以用于处理雷达数据的处理,如图像显示功能、图像拉伸、颜色处理、图像分类、几何校正、图像配准、卷积滤波、图像融合等。 目前,大所述雷达成像系统都是侧视成像,这种雷达系统所测量的距离是目标物到平台一侧的距离(倾斜距离),基于这种几何系统获得的图像叫斜距图像。雷达斜距数据在侧向范围有系统几何畸变,实际上,由于入射角的变化使得垂直侧向范围的地距和像素大小发生变化。因此,要使用雷达图像,必须经过从斜距到地距的校正处理。 自适应滤波器被设计成对斑点噪声压缩的同时,对图像分辨率的减少是微笑的。自适应滤波器运用围绕每个像元值标准差来计算一个新的像元值。不同于传统的低通平滑滤波,自适应滤波器在抑制噪声的通透式保留了图像的高频信息和细节。 Lee滤波器用于平滑亮度各图像密切相关的噪声数据以及附加或倍增类型的噪声。 增强型Lee滤波器可以在保持雷达图像纹理信息的同时减少斑点噪声。 Frost滤波器能在保留边缘的情况下,减少斑点噪声。 增强型Frost滤波器可以在保持雷达图像纹理信息的同时减少斑 点噪声。 Gamma滤波器可以用于在雷达图像中保留边缘信息的同时减少斑点噪声。 Kuan滤波器用于在雷达图像中保留边缘的情况下,减少斑点噪声。 Local Sigma滤波器能很好地保留细节并有效地减少斑点噪声,及时是在对比度较低的区域。 Bit Error Filters比特误差误差滤波器可以消除图像中的”bit-error”噪声。 收稿日期:2010-11-02 基金项目:国家 十一五 预研基金资助项目(51307040402) 作者简介:敖卓均(1985 ),男,广东阳江人,电子科技大学电子工程学院硕士研究生,从事穿墙雷达检测与成像研究.!!2010年12月 第31卷第6期湛江师范学院学报JOURNAL OF ZH ANJIAN G NORMA L COLLEGE Dec ,2010Vol 31!No 6 穿墙雷达成像中墙体回波抑制 敖卓均,贾!勇 (电子科技大学电子工程学院,四川成都611731) !!摘!要:在穿墙雷达成像应用中,墙体作为稳定的强散射体存在,对目标回波信号造成严重干扰.该文针对静止目标成像,提出用墙体回波估计后对消和滤波器滤除墙体回波的方法来抑制墙体回波,并仿真验证.另外提出墙体图像提取对消和多视角图像融合对墙体回波抑制的可行性 关键词:穿墙雷达成像;对消;多视角图像融合;墙体回波抑制 中图分类号:T N959!!!!文献标识码:A !!!!文章编号:1006-4702(2010)06-0064-11 穿墙成像雷达(Throug h the W all Imaging Radar,TW IR)是一种用来对被障碍物遮挡住的区域进行成像,在城市巷战、反恐斗争、公安防暴、灾害救援等军事和民事领域都有着广泛的应用前景.近几年,国内外许多机构都对穿墙成像雷达进行广泛和深入的研究[1-3]. 在穿墙雷达成像应用中,墙体作为稳定的强散射体存在,其回波信号会对目标回波信号造成严重干扰,临近墙体目标会被墙体旁边所淹没,造成最后成像结果中目标的丢失,并且,墙体图像与目标图像强弱对比明显,无法从图像中识别目标图像.因此,如何抑制墙体回波成为穿墙成像探测中的重要问题. 对于动目标,目标的运动会对回波信号进行多普勒调制,因此,通常通过简单的M T I 滤波器在时域上进行有效地墙体回波抑制.对于静止目标,墙体抑制就变得更加复杂,本文针对这一特殊情况进行研究. 在穿墙静止目标成像应用中,现有墙体回波抑制方法可归纳为以下3类: ?信号层面 1)墙体回波估计后对消 该方法对墙体回波的抑制效果完全取决于对墙体回波估计的准确性,墙体回波估计方法主要包括:空场景回波作为墙体回波;阵列天线回波平均作为墙体回波;阵列天线回波奇异值分解提取墙体回波. 虽然不同天线间墙体回波有较强的相关性,但之间的差异性会影响对消效果,因此,自适应滤波器被用来对估计到的墙体回波进行处理以匹配于不同天线位置下的墙体回波的差异性,LM S 和RLS 滤波器可实现这类要求. 2)滤波器滤除墙体回波 由于天线阵列中不同天线的墙体回波在回波延迟和幅度上近似相同,同时,目标回波在不同天线回波中呈现非线性变化,因此,墙体回波的空间谱和目标回波的空间谱存在差异,所以,空域滤波器对阵列天线回波进行处理可以有效地消除墙体回波. ?数据层面 3)图像数据处理 在图像域,墙体图像会对目标图像压制,造成目标图像无法识别,由于,墙体图像已经得到,因此,可以根 基于穿墙雷达对目标成像研究 在20世纪90年,美国军队将隔墙探测技术作为新《联合城区作战条令》重点研究的三大关键技术之一,并作为美国国防部先进研究项目局的重要研究项目之一,而超宽带穿墙雷达特性优良,因此被广泛的应用于军事领域。穿墙雷达是利用电磁波的穿透能力,发射电磁波穿透非金属建筑材料,并分析接收天线收到的回波信号,对墙后或封闭环境中的隐藏目标进行成像。由于超宽带穿墙雷达能够实现墙后隐藏目标的定位和探测,在反恐斗争中,可以实时地了解恐怖分子的分布情况以及人员的精确定位,这可以有效的提高营救人质的几率;在城市巷战中,利用超宽带穿墙雷达可以快速的探测隐藏在建筑物内的敌军分布,以便我军做出正确的部署;在各种灾难救援中,超宽带穿墙雷达还能够探测人的心跳、呼吸等微弱信号,从而能够使救援队伍能够快速、准确的进行救援工作。因此在穿墙雷达目标定位和成像方面所做的研究对丰富该领域具有积极的意义。 超宽带信号具有一个很大的带宽,而雷达信号的距离分辨率为/(2) R c B ?=,它与信号带宽成反比,因此可以得出超宽带雷达信号具有很高的距离分辨率,这对目标的识别、检测和成像具有非常重大的意义,正因为此近年来超宽带雷达一直是该领域的研究热点。除了具有高距离分辨率以外,超宽带雷达还具有如下一些优势: 一、超宽带雷达信号具有强的穿透能力,能够探测非金属室内环境中的隐藏目标和地下介质中的物质,因此近几年被广泛的应用于室内感知和探地雷达相关领域。 二、超宽带雷达信号抗干扰能力强,具有比较好的隐蔽性。一方面它具有极低的能量密度,如果要对其进行干扰,必须要加大干扰信号的带宽,但是这会导致干扰信号的功率谱密度降低,从而使干扰效果降低;另一方面超宽带雷达信号与传统的窄带雷达信号之间具有很小的干扰,很难被侦查,因此被广泛的应用在军事领域。 三、超宽带雷达具有对目标的感知能力。在雷达所接收到的超宽带反射信号中,不仅包含了目标的位置信息,还包含了目标的形状和电特性参数等信息,从而通过一些信号处理技术,可以从超宽带回波信号中反演出目标的位置、形状以及电特性参数等信息。 四、超宽带雷达具有超近程探测能力。传统的窄带雷达由于发射信号的带宽比较窄,在探测进程目标时会存在盲区,而超宽带雷达的最小探测距离与它的距离分辨率相匹配,这一特点使其具有超近程探测能力。 由于超宽带雷达具有传统窄带雷达所无法比拟的优点,因此开展先进的超宽 第二章距离高分辨和一维距离像 雷达采用了宽频带信号后,距离分辨率可大大提高,这时从一般目标(如飞 机等)接收到的已不再是“点”回波,而是沿距离分布开的一维距离像。 雷达回波的性质可以用线性系统来描述,输入是发射脉冲,通过系统(目标) 的作用,输出雷达回波。系统的特性通常用冲激响应(或称分布函数)表示,从 发射波形与冲激响应的卷积可得到雷达回波的波形。 严格分析和计算目标的冲激响应是比较复杂的,要用到较深的电磁场理论, 不属于本书的范围。简单地说,雷达电波作用的目标的一些部件对波前会有后向 散射,当一些平板部分面向雷达时还会有后向镜面反射;这些是雷达回波的主要 部分;此外还有谐振波和爬行波等。因此,目标的冲激响应(分布函数)可以用 散射点模型近似,即目标可用一系列面向雷达的散射点表示,这些散射点位于后 向散射较强的部位。由于谐振波和爬行波的滞后效应,有时也会有少数散射点在 目标本体之外。如上所述,目标的散射点模型显然与雷达的视线向有关,例如当 飞机的平板机身与雷达射线垂直时有很强的后向镜面反射,而在偏离不大的角度 后,镜向反射射向它方,不为雷达所接收。目标的雷达散射点模型随视角的变化 而缓慢改变,且与雷达波长有关,分析和实验结果表明,在视角变化约10°的 范围里,可认为散射点在目标上的位置和强度近似不变。顺便提一下,前面曾提 到微波雷达对目标作ISAR成像,目标须转动3°左右,在分析时用散射点模型 是合适的。 虽然目标的散射点模型随视角 快得多。可以想像到,一维距离像是 三维分布散射点子回波之和,在平面 波的条件下,相当三维子回波以向量 和的方式在雷达射线上的投影,即相 同距离单元里的子回波作向量相加。 我们知道,雷达对目标视角的微小变 化,会使同一距离单元内而横向位置 探地雷达成像算法研究 摘要 探地雷达(Ground Penetrating Radar,简称GPR)集无损检测、穿透能力强、分辨率高等众多优点而成为检测和识别地下目标的一种有效技术手段。性能优良的探地雷达成像方法有助于精确定位地下目标,同时提高对目标的检测和识别能力,从而推动探地雷达在城市质量监控、地质灾害、考古挖掘、高速公路无损检测、地雷探测等各个方面得到更广泛的应用。 本文以中国电波传播研究所的探地雷达LD-2000为实验设备,从中读取探测数据。以MATLAB为软件平台,实现了探地雷达数据的显示、处理、成像几个部分。其中数据显示方式包括数据的波形堆积图,剖面面色阶图以及带数据波形图;数据处理部分包括直达波的去除、背景噪声的去除、振幅增益等;雷达成像算法部分主要采用波前成像算法和投影层析成像算法。 Imaging Algorithm of Ground Penetrating Radar ABSTRACT GPR (Ground Penetrating Radar, referred GPR) set of non-destructive testing, penetration ability, many advantages of high resolution detection and identification of underground and become the target of an effective technical means. Excellent performance GPR imaging approach helps pinpoint underground targets, while increasing the target detection and identification capabilities, thereby promoting the quality of ground penetrating radar surveillance in the city, geological disasters, archaeological excavation, highway nondestructive testing, mine detection, etc. aspects to be more widely used. In this paper, China Institute of Radiowave Propagation GPR LD-2000 for the experimental apparatus, reads probe data. MATLAB as the software platform to achieve a ground-penetrating radar data display, processing, imaging several parts. Wherein the data includes a data waveform display stacked, with a cross-sectional side view and a gradation data waveform; data processing section includes the removal of the direct wave, the background noise removal, the amplitude gain, etc.; radar imaging algorithm some of the major imaging algorithm and the wavefront projection tomography algorithms. 天气雷达回波模拟系统的设计与实现 摘要:天气雷达回波模拟系统能够成功模拟出具有真实天气目标特征的回波信号,利用这种回波信号可以实现在实验室环境中完成本需在外场试验条件下才可以进行的雷达性能测试。首先介绍了天气雷达回波模拟的原理,设计出回波模拟流程图,其次给出了回波模拟硬件平台的设计及模拟软件实现的思路,最后根据真实天气回波的特征等信息生成模拟回波图,并对模拟前后的回波图进行对比分析。 关键词:天气雷达;回波;信号模拟 0 引言 在现代地基主动气象遥感领域,多普勒天气雷达占据着重要的地位,特别是在对一些突发性、灾害性等中小尺度天气过程的捕获与跟踪时,其较高的时间与空间分辨能力就显得越来越重要[1]。随着多普勒天气雷达在气象探测业务运行中的广泛使用,在雷达的研发与维护过程中,对雷达的性能进行完整测试就显得非常重要[2]。由于实验条件及天气状况等因素的影响,要在完全真实的天气过程的环境中对雷达各个模块及系统进行测试将非常困难。国内现阶段对雷达接收机性能测试所采用的方法一般是给其提供一个不具有天气目标回波特征的单一频率的信号,这些信号能够通过测量系统通道的技术参数来验证系统硬件的性能。但由于这些测试信号不具有天气信号的时频特征,故测试结果仍与处理真实天气回波时的状态存在差异。而将实时天气目标回波作为接收机的测试信号的方法却有成本过高、测试过程复杂、所需时间长等缺点。除此之外,由于实时气象目标的参数是不可控的,所以这种方法不能实现对接收机性能参数的定量测试。如果能够模拟产生具有真实天气目标特征的雷达回波信号,就可以在实验室环境中模拟完成外场试验所需的测试,同时也可以降低测试成本,缩短研发周期,提高工作效率[3]。除此之外,对模拟回波的参数进行控制,可以实现定量测试,进而可对接收机及后端的信号处理算法进行验证。 1 天气回波信号模拟的原理 由于天气目标的径向移动会造成接收信号的频率相对于发射信号的频率存在一定的频移(多普勒频移),即天气雷达回波信号可以看成原始发射信号在时间上的延迟并且频谱进行搬移后的一个时间序列,这就是回波信号模拟的基本原理[4]。 ZRNIC D S[5]在总结了滤波器法与快速卷积法等模拟算法后,从天气雷达回波信号的功率谱的角度,提出了简单实用的基于谱模型的直接拟合法。气象回波的功率谱密度函数为Pn(f): 其中,pr为回波的功率,fd为多普勒频率,f为频率标准差,PRF为脉冲重复频率,N 为样本个数。 由气象雷达方程及相关理论可知:pr=CZ/r2,fd=2vr。其中,C为雷达常数,只与雷达系统的参数有关;Z为反射率因子;r为气象目标与雷达站的径向距离;vr、v分别为径向速度和速度谱宽;为雷达发射电磁波波长。 为了模拟出具有真实回波信号的频谱特性,需要在式(1)中加入噪声,然后进行随机化可得式(4): 式中,随机变量rnd在区间[0,1]上具有均匀分布,PN(f)为每秒钟噪声总功率,则PN(f)/PRF为噪声功率谱密度。 为了获取回波信号的复频谱特征,需要在Pn(f)中引入0~2π变化的随机相位谱?渍n(f)=rnd·2π/rndmax,即可以构成回波信号的复频谱,然后将其进行离散傅里叶逆变换(IDFT)得到对应的时间序列sn: 穿墙成像雷达杂波抑制方法研究 穿墙雷达(Through-the-wall-radar,TWR)成像在各个领域的广泛应用,使TWR系统朝着多通道、多极化、多波段和高分辨率方向发展。随着TWR系统数据采集量海量增加,国内外学者提出将压缩感知理论应用于TWR成像,但在强杂波环境下,压缩感知TWR成像算法的性能会急剧下降。 另外,如何有效去除墙体内部钢筋的反射波,进一步提高TWR系统对墙后目标的成像和识别能力,成为亟需解决的问题。本论文针对上述两个问题展开了深入的研究。 基于压缩感知理论的TWR稀疏微波成像技术,利用探测场景具有稀疏性这一先验信息,可以大幅度降低回波信号的采样率,减小系统的数据采集量,实现对探测目标的准确高分辨率成像。但是在实际测量过程中由于墙体反射波的存在压缩感知TWR成像性能急剧下降。 针对上述问题,本文在TWR成像过程中针对墙杂波与成像空间分别具有低秩性和稀疏性的特点,提出一种基于低秩稀疏约束的TWR成像算法。所提成像算法通过奇异值软阈值法和1l范数最小化技术进行迭代求解低秩稀疏约束优化问题,实现在墙体强反射波存在的探测环境中基于压缩感知框架对墙后隐蔽目标的准确成像重建。 仿真与实验数据处理结果验证了所提成像算法的有效性和准确性。传统的TWR杂波抑制方法包括背景对消法、均值法和子空间投影法等,但是这些杂波抑制方法往往只适用于对均匀墙体引入的杂波抑制。 在TWR探测过程中墙体内部有钢筋的存在,传统杂波抑制方法不能去除墙体内部钢筋引入的杂波。针对上述问题,本文考虑到墙内钢筋的反射波信号的低秩 性与墙后目标回波的稀疏性,提出一种基于低秩稀疏表示的TWR杂波抑制算法。 该算法通过求解核范数与1l范数相结合的优化问题从而实现对墙体内部钢筋的反射波有效抑制。 三、雷达图像的增强处理 地质雷达数据由于干扰以及地下介质复杂的原因,即使进行了数据滤波、偏移归位处理,我们有时也难以从雷达图像上对其进行地质解释,需要对图像信息进行增强处理,改善图像质量以利于识别。 1、振幅恢复 雷达接收记录到的反射波振幅由于波前扩散和介质对电磁波的吸收,在时间轴上逐渐衰减。为了使反射振幅仅与反射层有关,需要进行振幅恢复。在均匀介质中,距发射天线为处的电磁波振幅为:,式中,是雷达发射天线发射出的电磁波的振幅;是波前扩散因子;是吸收系数。若接收到的反射波的双程走时为,则反射波的真振幅为。 由于反射波的实际路径(是电磁波的平均速度),则上式可变为:,于是可由雷达记录的反射波振幅A与反射波走时近似恢复反射波的真振幅,关键是吸收系数的选取。 2、道内均衡 雷达数据经处理后,通常浅层能量很强,深层能量很弱,这给信息输出显示造成困难,为了使浅、中、深层都能清晰显示,道内平衡能解决个问题。 道内均衡的基本思想是把各道中能量强的波相对压缩一定的比例,把相对弱的波增大一定的比例,使强波和弱波的振幅控制在一定的动态范围之内。据此,将一道记录的振幅值在不同的反射段内乘上不同的权系数即可。 设为均衡后的振幅,为待均衡的振幅值,为权系数(为采样号),则: ,(5-3-6) 是个缓慢渐变得序列,局部的可视为常数,这相当于由各个和各个构成的波形在局部看来是相似的。而从整道记录看,对振幅小的时段,取较小的值,以增大的值;对振幅较大的时段,用较大的值,以缩小的值。所以,应是一个与某个时段内的平均振幅成比例的序列。 在实际资料处理过程中,待均衡的记录长为,把它平分为段,每个小段长度为:,又设()为各段内的振幅和,记为: , 第段的平均振幅值 可代表每一个时间段内的平均振幅,以其倒数作为加权系。 则均衡处理后的振幅为: , 称为道内平衡系数,是个常数,由用户提供,用来调整振幅的幅度达到一定的目的。 3、道间均衡 一般情况下,由于接收条件的差异,雷达记录道与道之间的能量不均衡,这会影响剖面上同相轴的连续性,为了改善剖 前言 雷达成像技术是上个世纪50年代发展起来的,它是雷达发展的一个重要里程碑。从此,雷达不仅仅是将所观测的对象视为“点”目标,来测定它的位置与运动参数,而是能获得目标和场景的图像。同时,由于雷达具有全天候、全天时、远距离和宽广观测带,以及易于从固定背景中区分运动目标的能力,雷达成像技术受到广泛重视。 雷达成像技术应用最广的方面是合成孔径雷达(Synthetic Aperture Radar,简称SAR)。当前,机载和星载SAR的应用已十分广泛,已可得到亚米级的分辨率,场景图像的质量可与同类用途的光学图像相媲美。利用SAR的高分辨能力,并结合其它雷达技术,SAR还可完成场景的高程测量,以及在场景中显示地面运动目标(GMTI)。 SAR的高分辨,在径向距离上依靠宽带带信号,几百兆赫的频带可将距离分辨单元缩小到亚米级;方向上则依靠雷达平台运动,等效地在空间形成很长的线性阵列,并将各次回波存贮作合成的阵列处理,这正是合成孔径雷达名称的来源。合成孔径可达几百米或更长,因而可获得高的方位分辨率。 雷达平台相对于固定地面运动形成合成孔径,实现SAR成像。反过来,若雷达平台固定,而目标运动,则以目标为基准,雷达在发射信号过程中,也等效地反向运动而形成阵列,据此也可对目标成像,通称为逆合成孔径雷达(ISAR)。ISAR显然可以获取更多的目标信息。 最简单的雷达成像是只利用高距离分辨(HRR)的一维距离像。当距离分辨率达米级,甚至亚米级时,对飞机、车辆等一般目标,单次回波已是沿距离分布的一维距离像,它相当目标三维像以向量和方式在雷达射线上的投影,其分布与目标相对于雷达的径向结构状况有关。同时,高距离分辨率有利于分辨距离接近的目标,以及目标回波的直达波和多径信号。 本书将对当前已经广泛应用和具有应用潜力的内容作较为全面的介绍。 本书是《雷达技术丛书》中的一册,主要对象为从事雷达研制工作的技术人员,因此,本书编著时考虑到读者已有《雷达原理》和《雷达系统》方面的基础, 利用MATLAB的条带SAR 成像实验报告 实验者:040920228 秦坤 0409203 郭江哲 040920231刘海 一、实验目的 1.掌握SAR 成像基本原理。 2.学习利用MATLAB 做条带SAR 的距离与方位上的脉冲压缩。 3.学习正侧视条件下的距离多普勒算法。 二、基本实验原理 1.脉冲压缩基本原理 窄脉冲有这距离分辨率高的特点,而宽脉冲有着作用距离原的特点,为充分利用其相互 特变,而选择发射宽脉冲,满足作用距离的要求,在接收端,通过脉冲压缩提高分辨率。根据信号理论推导,信号可压缩的条件: TB >1 T — 发射信号时宽 B — 发射信号带宽 频域滤波器的三种构造方法: 1、将发射信号共轭反转,补零后作DFT 。 2、将发射信号补零后,作DFT 后取共轭。 3、根据发射信号频谱的解析表达式直接计算 2.合成孔径基本原理 常规雷达方位分辨率 为了改善方位分辨率要求非常大的天线孔径D 。利用阵列原理,将需要大孔径D 的天线分别用实阵代替而形成合成孔径。此时有: 3.SAR 信号分析 D λβ=a R R D λ ρβ==2a R L λ ρ= 根据SAR信号模型推导知方位分辨率为: 从上式可以看出此时的方位分辨率与距离无关,而与孔径大小成反比,这与传统雷达相反。 由于SAR信号和采集的缘故,方位上存在的距离徙动,根据远场理论分析知 有效的距离徙动校正方法是在距离多普勒域进行。校正方法: 方法1:插值 方法2:在频域乘以一个线性相位 根据上述分析得出SAR成像信号处理流程: 4.距离多普勒算法 距离徙动校正的难点: 方位向不同目标距离徙动轨迹交错导致无法有效统 一校正。 有效的解决方法:在距离多普勒域进行距离徙动校正。 SAR图像 2 a D ρ=雷达图像处理(ENVI)
穿墙雷达成像中墙体回波抑制
基于穿墙雷达对目标成像的研究
雷达成像技术-第二章汇总
探地雷达成像算法研究
天气雷达回波模拟系统的设计与实现
穿墙成像雷达杂波抑制方法研究
雷达图像的增强处理
雷达成像技术(保铮word版)-第一章-概论
雷达成像