汽车主动悬架控制策略综述
汽车主动悬架控制策略综述
摘要首先介绍了主动悬架的发展情况和应用情况,然后引入了作性能分析所需的车辆主动悬架动力学模型,以1/4动力学模型为基础,得出了运动微分方程以及控制状态方程组。最后,介绍了现在流行的主动悬架控制策略,包括PID 控制、鲁棒控制、神经网络控制、滑模变控制、模糊控制和自适应控制。
关键词:主动悬架;控制策略
Automotive Active Suspension Control Strategies
Abstract:Firstly, introducing active development and application of suspension, then introduced as the performance required for the analysis of vehicle active suspension dynamics model, through 1/4 kinetic model, derived differential equations of motion and control state equations .At last,Introduced the now popular active suspension control strategy,including PID control, robust control, neural network control, sliding mode control, fuzzy control and adaptive control.
Keywords:Active Suspension;Control Strategy
0 引言
传统的被动悬架的刚度和阻尼是按经验或优化设计的方法确定的,在汽车行驶过程中其性能是不变的,也是无法进行调节的。虽然随着近年来,悬架在设计和工艺上得到不断改善,实现了低成本、高可靠性的目标,但无法彻底解决平顺性和操纵稳定性之间的矛盾。20世纪50年代提出了全主动悬架的概念,主动悬架就是根据汽车的运动和路面的状况,适时地调节悬架的刚度和阻尼系数,使其处于最佳的减振状态。从20世纪80年代以来,世界各大汽车公司和生产厂家都在竞相研制开发这种新型的悬架系统。丰田、洛特斯、沃尔沃等汽车公司,已在汽车上进行了较成功的实验。
[1]
1 汽车主动悬架动力学模型
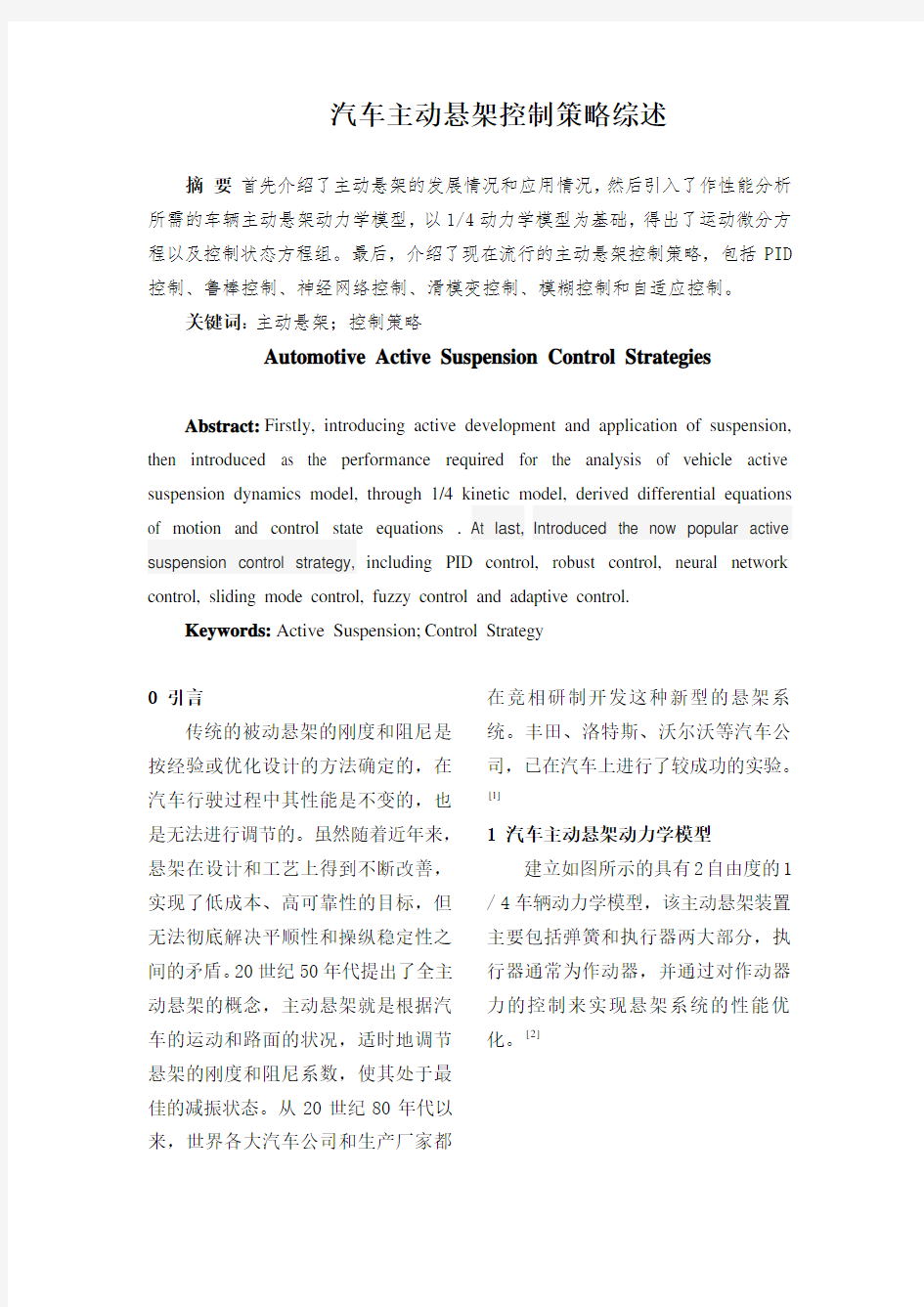
建立如图所示的具有2自由度的1 / 4车辆动力学模型,该主动悬架装置主要包括弹簧和执行器两大部分,执行器通常为作动器,并通过对作动器力的控制来实现悬架系统的性能优化。[2]
图1 主动悬架动力学模型 系统的运动微分方程如下:
()()0()()()0s s s s u s s u d u u s s u s s u d t u r m x k x x c x x F m x k x x c x x F k x x +-+--=??
----++-=?
式中,s m 、u m 分别表示簧载质量和非簧载质量;t k 、s k 分别表示弹簧刚度和轮胎刚度;r x 、s x 、u x 分别表示路
面位移、簧载质量位移和非簧载质量
位移;s c 表示粘滞阻尼系数;d F 表示主动控制力。
运用现代控制理论来研究系统,由模型可以得出系统有路面激励和控制力两个输入,相应的状态变量和输出变量如下:
[]1234,,,T
X x x x x = []1234,,,T Y y y y y =
式中,1y 为簧载质量加速度;2y 为悬
架动挠度;3y 为轮胎动载荷;4y 为非
簧载质量加速度;1x =s u x x -,2x =s x
,
3x =u r x x -,4x =u x ,1y =2x ,2y =1x ,
3y =3t k x ,4y =4x 。
应用现代控制理论将运动微分方程改写成状态方程组。方程中的A 、B 、
C 、
D 分别表示状态矩阵、输入矩阵、输出矩阵、传递矩阵。
()()X
AX Bu t Y CX Du t ?=+?
=+? 式中,
A=010100001s s s s
s s s s
t s u
u u
u k c c m m m k c
k
c m m m m -??????--????????--???? ;B=0
0101010s s m m ??????
????-????
-??
?
?C=01
0000000001s s s s s s t k c c m m m k ??--??????????????;D=10000
000s m ?
?
???
???????????
2 汽车主动悬架的控制策略 2.1 PID 控制
在汽车半主动悬架控制系统中,研究查表法PID 控制和模糊PID 控制具有一定的应用价值。PID 控制系统的基本工作原理是:通过加速度传感器测量得到车身加速度,该加速度信号经电荷放大器放大后输入PID 控制器,PID 控制器由比例单元(P )、积分单元(I )和微分单元(D )组成,其控制规
律可以描述为:
()I c p D K
G s K K s
s =++,经过
PID 处理的
信号反馈给半主动悬架,从而实现对悬架阻尼的控制。PID 控制具有原理简单,适应性强,鲁棒性好等优点,但也有其明显的不足。PID 在控制非线性、时变、耦合及参数和结构不确定
的复杂过程时,效果不是太好。[3][4]
2008年胡思明使用经典的PID 控制方法,对混合主动悬架的特征进行了初步研究,并通过计算机仿真得出时域效果图。由效果图可以得出,基于反馈PID 控制的混合主动悬架车身振动加速度、悬架动行程、轮胎动载荷分别改善11.8%、1.8%、9.7%。[5]武汉理工大学的杜常清、常晓瑞以白噪声和正弦信号做为路面激励信号,建立路面模型,利用PID 控制策略在Matlab/Simulink 中进行仿真并进行台架试验。由结果可得,无论从仿真曲线还是从台架试验结果来看,悬架系统的车身垂直加速度、动扰度和轮胎动荷载系数3项评价指标相对于无PID 控制主动悬架来说,均得到了良好的改善。[6] 2.2 鲁棒控制
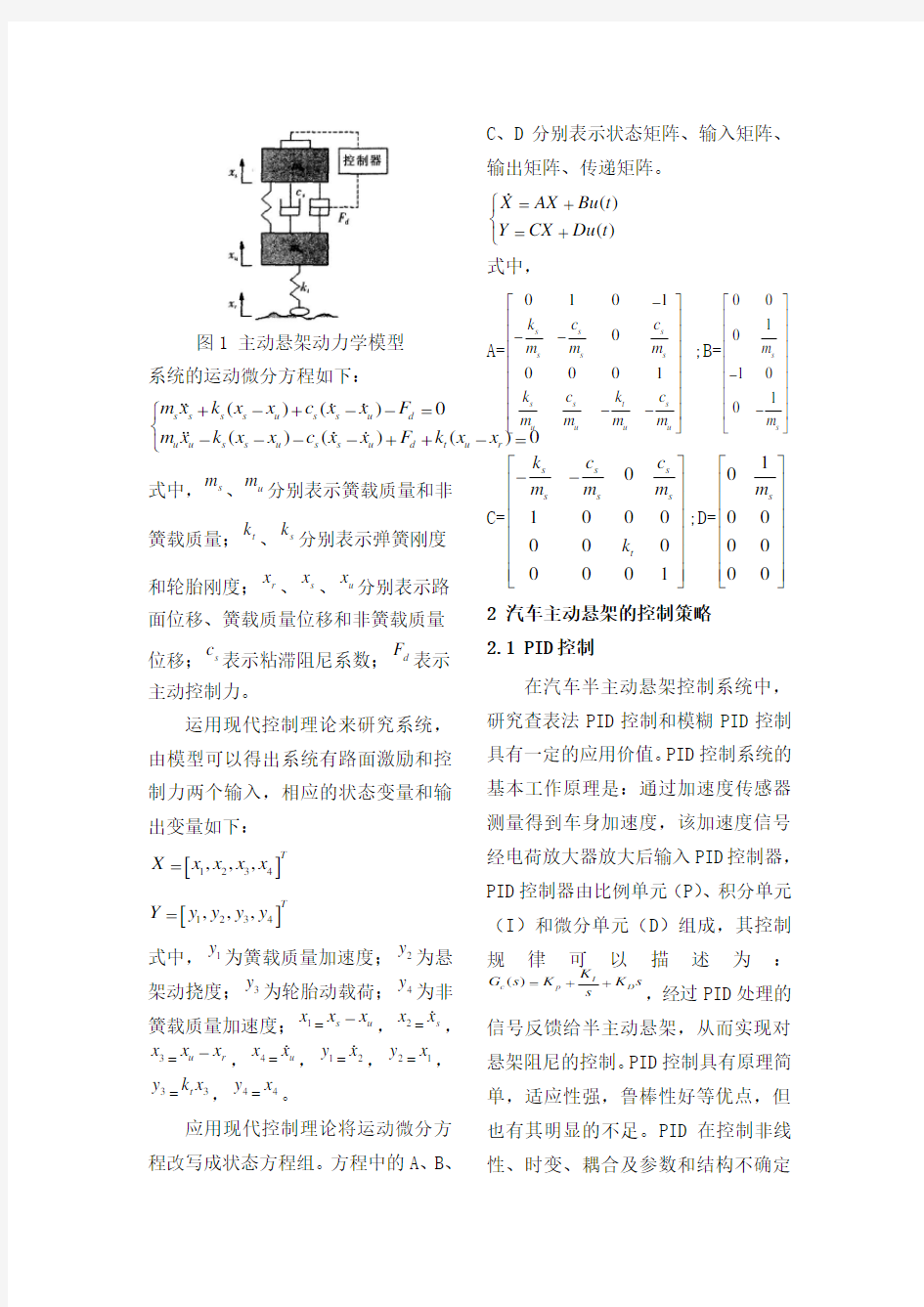
许多鲁棒控制均可转化为H ∞最优控制问题。在H ∞控制理论中,运用小增益定理,只要扰动在某一有界范围内,对于结构不确定性和外干扰,系统都可以在一定程度上保证鲁棒的稳定性。如图所示,当?=0时,zw G 为ω
到z 的传递函数,令zw G γ∞
=,那么
只要1
γ-∞?<,就保证系统的稳定性,所以由上式可得,γ越小,那么系统抗
干扰能力越强。
[7][8]
图2 小增益定理保证系统鲁棒稳定性
荷
兰
R.G.Mhuisman
和
F.E.veldPaus 等人基于最优控制理论,设计应用带有预见的连续时间控制策略,控制对象为二自由度的牵引车全自动悬架,控制目标为车身振动加速度,考虑路面为阶跃输入时,与被动悬架相比,控制目标有较大幅度的降低。[9]清华大学李克强,董珂和东京农工大学的永井正夫考虑了发动机、座椅和乘客等影响因素,建立了4自由度、6自由度、8自由度三种车辆动力学模型,并通过仿真比较得到,在影响驾驶舒适性的频率范围内,4自由度、6自由度和8自由度车辆模型的振动响应有明显差别;发动机、座椅和乘客对控制系统能产生重要影响。
[10]
重庆大学的李以农、郑玲等考虑到
虽然H ∞控制器在系统出现不确定性时具有较好的鲁棒稳定性和干扰抑制能力,但是以牺牲系统的其他性能为代价,并通过建立七自由度整车模型,采用多目标控制的基于LMI 的2/H H ∞控制方法设计整车模型主动悬架控制
器,以实现较好的平顺性和操纵性。[11]
2.3 神经网络控制
神经网络是近20年来迅速发展起来的一门新兴交叉学科,它是以大量处理单元(神经元)为节点,按某种拓扑结构所构成的高度并行的非线性动力系统,它具有自适应学习、并行分布处理和较强的稳健性、容错性等特性,因此具有神经网络自适应控制的主动悬架能够较好地减少汽车振动,提高汽车行驶平顺性和稳定性。
日本的Moran Antonio和Nagai Masao将神经网络控制应用于主动悬架上,通过神经观测器辨识出悬架的逆动力学特性,在此基础上,神经控制器采用非线性最优控制策略对悬架进行控制,减小汽车振动,模拟计算结果表明神经网络控制较线性反馈控制,其系统性能改善约10%,还可以应用神经网络理论设计车辆主动悬架系统的动力补偿器型控制器。研究表明用神经网络控制的非线性悬架系统,比用传统的LQ调节器控制的悬架具有更好的性能。[12]江苏大学的孙运全、赵李凤和项伟将模糊和神经网络相结合,提出了一种神经网络自适应模糊控制的方法,用来调整汽车半主动悬架可调阻尼器的阻尼值,仿真结果表明神经网络控制器可以显著改善车身垂直加速度与车辆的平顺性,同时减小了悬架动扰度和车轮动载荷,使车辆的操纵稳定性和行驶安全性得到了改善。[13]东北大学的唐传茵、李华等人采用遗传算法与神经网络相结合的控制策略,选取积分白噪声激励作为路面输入信号,对悬架系统特性进行分析,并与传统的被动悬架进行比较,仿真结果表明基于遗传算法神经网络控制对于改善车辆行驶平顺性具有显著效果。[14]
2.4 滑模变结构控制
滑模变结构控制是控制理论的一个重要分支。它适用于线性或非线性系统,方法简单,易于实现,对模型参数的不确定性和外界扰动具有高度的鲁棒性。[15]文献[16]把非线性“滑模”控制规则应用于电液悬架系统,控制器依赖于精确的悬架系统模型,采用自适应控制的车辆悬架阻尼减振系统改善车辆的行驶特性。这种方法在德国大众汽车公司的底盘上得到了应用。
2.5 模糊控制
自20世纪90年代以来,模糊控制被应用到汽车半主动悬架系统的控制中。模糊控制系统不建立精确的数学模型,不依赖于系统精确的物理参数,鲁棒性好。汽车悬架系统是一个复杂的非线性系统,其数学模型复杂,应用模糊控制方法,对控制实际车体有现实意义。1995年,A.S.cherry和R.P.Jones通过仿真计算证明使用模糊逻辑技术控制悬架效果良好,控制易于实现,并给出了模糊规则。
[17]Taegeun Junga、Jeongmok Cho等运用基于启发式的模糊控制和天棚控制相结合的Fuzzy Skyhook控制策略,采用GA遗传算法进行了优化仿真效果的研究。[18]东北大学的唐传茵、赵广耀通过建立整车7自由度模型,采用两种模糊控制策略,对提高车辆的舒适性与操纵稳定性进行研究。[19]
2.6 自适应控制
自适应控制具有参数辨识功能,能适应悬架载荷和元件特性变化,自动调整控制参数,保持其性能最优。应用于车辆悬架系统自适应控制方法主要有模型参考自适应控制和自校正控制两类,其中自校正控制是目前应用较广的一类。采用自适应控制的车辆悬架阻尼减振系统改善车辆的行驶特性,在德国大众汽车公司的底盘得到应用。
3 结束语
随着人民物质科技文明高速发展,人们对车辆高舒适性和安全性的需求日益加剧,传统的被动悬架已经不能满足人们的要求,在这种环境下,主动悬架应运而生。其中主动悬架性能的好坏主要由它的控制系统决定,所以研究主动悬架的控制策略具有重要意义。
参考文献
[1] 陈家瑞.汽车构造[M].北京:机械工业出版社,2009.
[2] 寇发荣,方宗德,赵研.汽车主动悬架系统的试验研究[J].汽车技术,2007,05:34-36.
[3] 陈军,欧家福,罗显政,刘德辉.汽车主动悬架
系统的研究开发进展综述[J].研究与开
发,2010,02:64-67.
[4] 王正林,王胜开,陈国顺.MATLAB/Simulink与控制系统仿真[M].北京:电子工业出版社,2005.
[5] 陈昆山,胡思明,戴建军.基于作动力反馈控制的电磁反力式混合型主动悬架[J].噪声与振动控制,2008,04:70-74.
[6] 杜常清,常晓瑞.PID控制策略下主动悬架系统的动态仿真[J].武汉理工大学学报(信息与管理工程版),2015,06:680-683.
[7] 张羽飞,冯汝鹏,王茂.H2/H∞混合优化问题综述[J].信息与控制,2002,05:430-436.
[8] 梅生伟,申铁龙,刘康志.现代鲁棒控制理论与应用[M].北京:清华大学出版社,2008.
[9] R.G.Mhuisman,F.E.Veldpaus,Hjmvoets.An optimal eontinuous time control strategy for active suspension with
preview[J].VSD,22(1993):43-55.
[10] 李克强,董珂,永井正夫.多自由度车辆模型
主动悬架及鲁棒控制[J].汽车工程,2003,25(1):7-9.
[11] 李以农,郑玲,罗铭刚,米林. 汽车主动悬架H2/H∞多目标控制线性矩阵不等式方法[J].重庆
大学学报,2010,04:1-7.
[12] 姜健飞,胡良剑,唐俭.数值分析及其MATLAB
实验[M].北京:科学出版社,2004.
[13] 孙运全,赵李凤,项伟.基于主动悬架的模糊
神经网络控制的研究[J].计算机测量与控
制,2014,22(5):1415-1417.
[14] 唐传茵,李华,周炜,等.基于遗传算法和神经网络的车辆主动悬架控制技术[J].农业机械学
报,2009,40(2):6-11.
[15] 郑玲,邓兆祥,李以农.汽车半主动悬架的滑
模变结构控制[J].振动工程学报,2003,16(4):457-462.
[16] 黄文梅,等.系统仿真分析与设计—MATLAB语言工程应用[M].长沙:国防科技大学出版社,2001.
[17] Liu H,Nonami K,Hagiwara T. Semi-active Fuzzy Sliding Mode Control of Full Vehicle and Suspensions[J]. Journal of Vibration and Control,2005,11(8):1025-1042.
[18] Taegeun Junga,Jeongmonk Cho. Fuzzy Skyhook Control of Semi-active Suspensions using Genetic Algorithm[C]. Proceedings of SPIE on Smart Structures and Materials,2006.
[19] 唐传茵,赵广耀.基于模糊控制策略的车辆主动悬架研究[J].动力学与控制学报,2015,13(3),210-214.
汽车半主动悬架系统
传统的悬架系统的刚度和阻尼是按经验或优化设计的方法确定的,根据这些参数设计的悬架结构,在汽车行驶过程中,其性能是不变的,也是无法进行调节的,使汽车行驶平顺性和乘坐舒适性受到一定影响。故称传统的悬架系统为被动悬架系统。如果悬架系统的刚度和阻尼特性能根据汽车的行驶调节(车辆的运动状态和路面状况等)进行动态自适应调节,使悬架系统始终处于最佳减振状态,则称为主动悬架。 主动悬架系统按其是否包含动力源可以分为全主动悬架(有源主动悬架)和半主动悬架(无源主动悬架)系统两大类。 全主动悬架 全主动悬架是根据汽车的运动状态和路面状态,适时地调节悬架的刚度和阻尼,使其处于最佳减振状态。它是在被动悬架(弹性元件、减振器、导向装置)中附加一个可控作用力的装置。通常由执行机构、测量系统、反馈控制系统和能源系统4部分组成。执行机构的作用是执行控制系统的指令,一般为发生器或转矩发生器(液压缸、气缸、伺服电动机、电磁铁等)。测量系统的作用是测量系统各种状态,为控制系统提供依据,包括各种传感器。控制系统的作用是处理数据和发出各种控制指令,其核心部件是电子计算机。能源系统的作用是为以上各部分提供能量。 半主动悬架 目前,主流的半主动悬架不考虑改变悬架的刚度,而只考虑改变悬架的阻尼,因此它无动力源且只由可控的阻尼元件组成。由于半主动悬架结构简单,工作时几乎不消耗车辆动力,而且还能获得与全主动悬架相近的性能,故有较好的应用前景。 半主动悬架按阻尼级又可以分成有级式和无级式两种。 (1)有级式半主动悬架它是将悬架系统中的阻尼分为两级、三级或更多级,可由驾驶员选择或根据传感器信号自动进行选择悬架所需要的阻尼级。也就是说,可以根据路面条件(好路或坏路)和汽车的行驶状态(转弯或制动)等来调节悬架的阻尼级,使悬架适应外界环境的变化,从而可以较大幅度地提高汽车的行驶平顺性和操纵稳定性。 半主动悬架中的三级阻尼可调减振器的旁路控制阀是由调节电动机来带动阀芯转动,使控制阀孔具有关闭,小开和大开3个位置,产生3个阻尼值。该减振器应用于OPEL SENTOR 和OPELGA轿车上。 (2)无级式半主动悬架它是根据汽车行驶的路面条件和行驶状态,对悬架系统的阻尼在几毫秒内有最小变到最大进行无级调节。
基于LQR控制的主动悬架优化设计
基于LQR控制的主动悬架优化设计 摘要:根据汽车行驶性能的要求,本文以1/4 车辆模型为例,建立汽车的动力学模型,利用线性二次最优控制理论对主动悬架的LQG 控制器进行设计,并运用MATLAB/simulink对汽车动力学模型进行仿真。结果表明: 具有LQG 控制器的主动悬架对车辆行驶平稳性和乘坐舒适性的改善有良好效果。 关键词:主动悬架;被动悬架;LQG控制器引言 悬架系统是汽车的重要部件, 对于汽车的平顺性、操稳性和安全性都 有着重要的影响, 而主动悬架是悬架发展的必然方向。控制器的设计对 于主动悬架性能的发挥起着重要的作用, 本文中以1/4 汽车主动悬架为 研究对象, 建立汽车动力学模型和设计LQG控制器算法, 应用 Matlab/Simulink 进行汽车系统的控制仿真。 1 基于线性二自由度汽车模型的建立 1.1 被动悬架系统的建立 车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地 与车辆行驶的情况相吻合,文本一1/4 车辆模型为研究对象,车辆模型如 图1 所示。 图1 :被动悬架车辆1/4 模型 根据图1 所示,建立一个被动悬架车辆1/4 模型,首先建立运动微分方程: m b x b K s(x b x w ) C s(x b x w ) m w x w K t (x w x g) K s(x b x w) C s(x b x w)
整理得: x b C s xb ss s x w s x b s s x m b m b m b C s K s K s K t x b s x b s x b s t x b m w m w m w 1) 式中: C s 为悬架阻尼, K s 为悬架刚度。 选取状态变量和输入向量为: U x g 则可将系统运动方程及路面激励写成状态空间矩阵形式,即: X AX BU C s C s K s K s m b m b m b m b K t C s C s K s K s K s A B m w m w m w m w m w 1 0 0 0 1 x w x g x b x w ]T 将性能指标项写为状态变量以及输入信号的线性组合形式, 即: Y CX DU 其中: Cs Cs Ks Ks 0 m b m b m b m b D1 C0 0 0 1 1 1 1.2 被动悬架系统的 建立 m b C s 其中, A 为状态矩阵, B 为输入矩阵,其值如 下: 将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:
汽车主动安全和被动安全
汽车安全对于车辆来说分为主动安全和被动安全两大方面。主动安全就是尽量自如的操纵控制汽车。无论是直线上的制动与加速还是左右打方向都应该尽量平稳,不至于偏离既定的行进路线,而且不影响司机的视野与舒适性。这样的汽车,当然就有着比较高的避免事故能力,尤其在突发情况的条件下保证汽车安全。被动安全是指汽车在发生事故以后对车内乘员的保护,如今这一保护的概念已经延伸到车内外所有的人甚至物体。由于国际汽车界对于被动安全已经有着非常详细的测试细节的规定,所以在某种程度上,被动安全是可以量化的。 汽车安全之主动安全设备篇 盘式制动器 盘式制动器又称为碟式制动器,顾名思义是取其形状而得名。它由液压控制,主要零部件有制动盘、分泵、制动钳、油管等。制动盘用合金钢制造并固定在车轮上,随车轮转动。分泵固定在制动器的底板上固定不动,制‘动钳上的两个摩擦片分别装在制动盘的两侧,分泵的活塞受油管输送来的液压作用,推动摩擦片压向制动盘发生摩擦制动,动作起来就好像用钳子钳住旋转中的盘子,迫使它停下来一样。 盘式制动器散热快、重量轻、构造简单、调整方便。特别是高负载时耐高温性能好,制动效果稳定,而且不怕泥水侵袭,在冬季和恶劣路况下行车,盘式制动比鼓式制动更容易在较短的时间内令车停下。有些盘式制动器的制动盘上还开了许多小孔,以加速通风散热和提高制动效率。 防抱死制动系统(ABS) ABS是Anti-lockBrakingSystem缩写。世界上最早的ABS系统是首先在飞机上应用的,后来又成为高级轿车的标准配备,现在则大多数轿车都装有ABS。 众所周知,刹车时不能一脚踩死,而应分步刹车,一踩一松,直至汽车停下,但遇到急刹时,常需要汽车紧急停下来,很想一脚到
主动悬架pid控制策略研究
汽车悬架的半主动控制系统MATLAB/SIMULNK仿真 S0705234 沙小伟 摘要:分析当前轿车的悬架系统,对之进行简化。首先建立其1/4模型,利用仿真软件MATLAB里面的附件Simulink对悬架的简化模型进行仿真,考察其加速度,输出位移等特性。在此基础上进一步建立悬架系统的1/2模型,继续考察车身的加速度,输出位移,转角等系列特性。Simulink软件在整个的仿真过程中显示出强大的能力。 关键词:汽车悬架,半主动控制,仿真 Abstract: Analyze the suspension system of modern car, and then simplify it. First the model was analyzed with 2 degrees of freedom by the software simulink. Based on this, and then building 12 degrees of the suspension system. Inspect the acceleration and rotation angle and some other characters. In the whole process, the software simulink displayed powerful capacity. Keywords: car suspension,semi – active control, simulation 引言 汽车悬架系统简介。悬架系统是车辆的一个重要组成部分。车辆悬架性能是影响车辆行驶平顺性、操作稳定性和行驶速度的重要因素。传统的被动悬架一般由具有固定参数的弹性元件和阻尼元件组成,被设计为适应某一种路面,限制了车辆性能的进一步提高。20世纪70年代以来工业发达国家就已经开始研究基于振动主动控制的主动、半主动悬架系统。 近年来随着电子技术、测试技术、机械动力等学科的快速发展,使车辆悬架系统由传统被动隔振发展到振动主动控制。特别是信息科学中对最优控制、自适应控制、模糊控制、人工神经网络等的研究,不仅使悬架系统振动控制技术在现代控制理论指导下更加趋于完善,同时已经开始应用于车辆悬架系统的振动控制[1],使悬架系统振动控制技术得以快速发展。随着车辆结构和功能的不断改进和完善,研究车辆振动,设计新型悬架系统,将悬架的振动控制到最低水平是提高现代车辆质量的重要措施。 当代轿车的悬架系统。当代轿车悬架系统最常见的形式有:摇臂滑柱式(麦弗逊)、双A臂与多连杆式悬架系统。摇臂滑柱式悬架具有结构简单、成本低廉等优点。常见的欧洲车采用的较多。它存在的问题是:在持续颠簸的路面行驶,驾驶员容易疲劳,即车辆的操作稳定性不好,舒适性欠佳。但是由于其结构简单、易维修保养及成本低,因此在一些中低价位车上广泛地用着。 一些新型轿车上常见的多连杆式悬架系统,具有极佳的舒适性。多连杆式悬架系统的最大的优点是:其可平衡的达到其它悬架系统所达不到的性能要求,它是目前最先进的悬架系统。以日产兼具舒适性和操作稳定性智能型“QT悬架系统”为例,它具有极佳的操作稳定性转弯及直线行驶稳定性,能有效的克服路面的颠簸状况及改善制动时汽车的点头现象,可有效地降低车辆行驶的噪音[2],使车内更加宁静,全面提高的汽车的舒适性,且具备结构简单,体积更小,噪音更小的优点。此种悬架极有可能成为未来悬架系统的主流。 双A臂悬架系统是一种兼具舒适性条件和操作稳定性的组合方案。但其成本高昂,生产工艺难度大,且要求具有极高的定位精度,因此只有在赛车和高价位车上才应用。双A臂悬架再加上防倾平衡杆,能很好的适应急转弯的操作。丰田LUXUS IS 200就装用了此类悬架,再加上低高宽比轮胎、创立了驾车者十分信赖的行车稳定性。
基于LQR控制的主动悬架优化设计
基于LQR 控制的主动悬架优化设计 摘要:根据汽车行驶性能的要求,本文以1/4车辆模型为例,建立汽车的动力 学模型,利用线性二次最优控制理论对主动悬架的LQG 控制器进行设计,并运用MATLAB/simulink 对汽车动力学模型进行仿真。结果表明: 具有 LQG 控制器的主动悬架对车辆行驶 平稳性和乘坐舒适性的改善有良好效果。 关键词:主动悬架;被动悬架;LQG 控制器 引言 悬架系统是汽车的重要部件, 对于汽车的平顺性、操稳性和 安全性都有着重要的影响, 而主动悬架是悬架发展的必然方向。控制器的设计对于主动悬架性能的发挥起着重要的作用, 本文中以1/4汽车主动悬架为研究对象,建立汽车动力学模型和设计LQG 控制器算法,应用Matlab/Simulink 进行汽车系统的控制仿真。 1 基于线性二自由度汽车模型的建立 1.1 被动悬架系统的建立 车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地与车辆行驶的情况相吻合,文本一1/4车辆模型为研究对象,车辆模型如图1所示。 图1:被动悬架车辆1/4模型 根据图1所示,建立一个被动悬架车辆1/4模型,首先建立运动微分方程: ()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----???=--+-+-??
整理得: ??? ? ?? ?+--+-+-+-=-+-+-+-=g w t b w t s b w s b w s b w s w b b s b b s w b s b s b x m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x (1) 式中:s C 为悬架阻尼,s K 为悬架刚度。 选取状态变量和输入向量为: []w b w b x x x x X = g x U = 则可将系统运动方程及路面激励写成状态空间矩阵形式,即: BU AX X += 其中,A 为状态矩阵,B 为输入矩阵,其值如下: ?????? ?? ? ?????????---- -= 00 1 001w s s w s w s w s b s b s b s b s m K K m K m C m C m K m K m C m C A ???? ?? ????????=000w t m K B 将车身加速度、轮胎动变形、悬架动行程作为性能指标,即: T w b g w b x x x x x Y ][--= 将性能指标项写为状态变量以及输入信号的线性组合形式,即: DU CX Y += 其中: ??? ?? ? ? ???????---=11001000b b b b m Ks m Ks m Cs m Cs C ???? ? ?????-=010D 1.2 被动悬架系统的建立 如图2所示,
电控悬架系统的控制原理和控制方法
1、弹性元件 空气弹簧 在空气悬挂系统中,空气弹簧代替了普通悬挂系统的螺旋弹簧。他有一个被卡紧在弹簧底部活塞上的合成橡胶和塑料膜片,一个端盖固定在膜片的上部,并且在端盖上有空气弹簧阀。通过空气弹簧的充气或者放气,保证了恒定的车辆纵倾高度。前空气弹簧安装在控制臂和横梁之间。空气弹簧的下端用卡箍卡紧在控制臂上,而在上端安装在横梁的弹簧座上。前减震器和弹簧是分开安装的。 空气弹簧电磁阀 在每个空气弹簧的上部都安装了一个空气弹簧电磁阀,并且正常情况下电磁阀是关闭的。当电磁阀线圈通电时,活塞移动就会使得到空气弹簧的气路打开。上面这种情况下,空气就会进入空气弹簧,或者从空气弹簧排出。在阀的末端安装了两个O形密封圈,用来密封空气弹簧罩。而阀就安装在类似于散热器承压盖的两成转动作用的空气弹簧罩内。 空气压缩机 空气压缩机的单活塞通过曲轴和连杆带动在缸体内上下运动。电枢连接在曲轴上,因此,电枢的转动就会使得活塞上下运动,当压缩机的输入端接上12V电源时,电枢就开始转动了。在缸体的顶部有进气阀和排气阀。压缩机上安装的硅胶干燥器去除了进入系统空气中的水分。 2、传感器 高度传感器 在空气悬架系统中,位于下控制器臂和横梁之间有2个前高度传感器,而在悬架和车架之间有一个后高度传感器。每个高度传感器都有一个安装传感器上端的磁性滑块。当车辆行程高度发生变化时,磁性滑块就会在传感器下壳内上下运动。传感器下壳上有2个通过电线束连接在控制模块上的电子继电器。 车辆动态悬挂(VDS)系统 车辆动态悬挂(VDS)系统由以下部件组成: 1,双位维护开关; 2,2个前高度传感器; 3,1个后高度传感器; 4,有内部电磁排气阀和空气干燥器的压缩机; 5,控制模块; 6,空气管路; 7,前后混合空气弹簧和减震器; 8,4个空气弹簧电磁阀; 9,压缩机继电器。
主动悬架LQG最优控制设计
主动悬架LQG最优控制设计 吕福麟 113085234379 摘要:根据汽车行驶性能的要求,建立二自由度的1/4汽车动力学模型,利用最优控制理论对主动悬架的LQG(Linear Quadratic Gaussian)控制器进行设计,运用MATLAB/simulink对模型仿真,对比主动悬架与被动悬架在控制效果上的差别。仿真结果表明,具有LQG控制器的主动悬架可以明显的提高汽车行驶的操稳性能。 关键词:主动悬架;LQG控制器;MATLAB/simulink;仿真结果ABSTRACT:According to the requirement of the vehicle driving performance,a 2-degree-of-freedoms 1/4 car dynamic model was build.LQG(Linear Quadratic Gaussian) controller for active suspension was designed with the optimal control law,MATLAB/simulink was used to simulation the model,compared the difference of control performance with active suspension and passive suspension.The result of simulation show that it could improve the car driving handling and stability with LQG controller. Key Words:active suspension,LQG controller,MATLAB/simulink,simulation result 1前言 传统的悬架主要由弹性元件、减震器和导向装置组成,他们的阻尼和刚度已经确定就不便于调节,而且只能在特定的路面激励和特定的车速下才能达到最优控制,灵活性较差。不能满足人们对驾驶舒适性和操纵稳定性的要求。为了解决这个问题,主动悬架控制渐渐得到发展,他与被动悬架的主要区别在于可以根据不同路面激励和行驶状况,自行调节车辆的动态,从而满足人们对行驶的要求。本问就是在此基础之上研究主动悬架的最优控制。 2 2自由度1/4车辆模型的建立
汽车主动悬架控制系统的发展研究
目录 1 引言 (1) 2 汽车悬架系统的类型和应用 (1) 2.1 被动悬架 (1) 2.2 主动悬架 (2) 2.3 半主动悬架 (2) 3 主动悬架控制系统国内外研究现状 (2) 4 汽车悬架的控制策略 (3) 4.1 天棚阻尼与开关阻尼控制 (3) 4.2 随机线性二次最优控制 (3) 4.3 模糊控制 (4) 4.4 神经网络控制 (4) 4.5 预测控制 (4) 4.6 滑模变结构控制 (5) 4.7 复合控制 (5) 5 控制方法的展望 (5) 5.1 注重控制策略的综合运用 (5) 5.2 注重汽车其他系统与主动悬架系统的联合控制研究 (5) 5.3 注重悬架系统模型的降阶研究 (6) 6 结论 (6) 参考文献: (6)
汽车主动(半主动)悬架控制系统的 研究发展 1引言 汽车主动悬架目前是国内外研究的热点问题,研究的关键技术主要在控制策略的选择上及执行器的研发方面。国外由于成本问题,一些油气主动悬架也仅限用在一些高级轿车上,国内在此方面还处在研发及试验阶段,离主动悬架系统普遍使用在轿车上的时代还较远。 2汽车悬架系统的类型和应用 悬架是车架与车桥之间一切传力装置的总称,它的主要功用是传递作用在车轮和车架之间的力和力矩,缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能平顺行驶。衡量悬架性能好坏的主要指标是汽车行驶的平顺性; 即乘坐舒适性和操纵稳定性,但这两个方面是相互排斥的性能要求。由于被动悬架的刚度和阻尼系数是固定的,无法根据不同的使用要求自适应地改变,在结构设计上只能是满足平顺性和操纵稳定性之间矛盾的折衷。 为服这个缺陷,国外在五十年代提出了“主动悬架”的概念。主动悬架的特点是能根据外界输入或车辆本身状态的变化进行动态自适应调节。主动悬架包控制单元和力发生器,力发生器的作用下使悬架的特性得到控制,如同改变了悬架的刚度和阻尼系数,其中最关键的是控制算法的优劣。 2.1被动悬架 被动悬架, 由弹性元件和不可变参数的减振器组成, 只能在特定工况下达到最优, 缺少对变载荷、变车速、不可预测路况的适应性。被动悬架是传统的机械结构,由弹簧、减震器和导向机构组成。被动悬架的刚度和阻尼系数均不可调,只能在特定的工况下达到最优减振效果,存在明显的共振峰,难以同时获得良好的乘坐舒适性和操纵稳定性,缺乏灵活性。但被动悬架因结构简单、设计容易和制造方便,且无须额外的能量输入,目前在中低档轿车上应用最为广泛[1]。为了进一步改善被动悬架的减振效果,满足现代汽车对悬架提出的更高的性能要求,在桑塔纳、夏利和赛欧等轿车上加强了通过优化寻找最优悬架参数和对悬架导向机构的研究,采用了带有横向稳定杆的多连杆机构悬架系统,在一定程度上改善了被动悬架减振效果。
汽车主动安全技术之EDB
汽车主动安全技术之EBD EBD的英文全称是Electric Brakeforce Dis-tribution 。EBD能够根据由于汽车制动时产生轴荷转移的不同,而自动调节前、后轴的制动力分配比例,提高制动效能,并配合ABS提高制动稳定性。 汽车制动稳定性直接影响到汽车安全,而制动稳定性与制动时车轮是否抱死以及前后车轮的抱死顺序密切相关。前轮抱死车辆将失去转向能力,后轮抱死则会发生侧滑甚至甩尾,后果更严重。理想的前后桥制动力分配曲线(简称I线) 如图2-1所示,它只与汽车的总重及质心位置有关,因此空载和满载时的I 曲线是不同的。实际上前后桥上的制动力分配是由前后制动器的大小决定的,因此它只能是一条直线即β线。 图2-1汽车前后桥制动力分配曲线 传统的汽车制动系统通常都通过在前后轴制动管路间增加一个比例阀来限制后轴的制动力,以避免制动时后轮先发生抱死侧滑,从而获得如下图所示的制动力分配曲线,但后桥的附着利用率仍然不是最好,其附着损失见图2-2中阴影部分 图2-2带比例阀的前后桥制动力分配曲线图2-3带EBD的前后桥制动力分配曲线EBD 采用电子技术替代传统的比例阀来控制汽车液压制动系统的前后桥制
动力分配,其基本思想:尽可能增大后轮制动力,由传感器监测车轮的运动情况,一旦发现后轮有抱死趋势,电子控制器控制液压制动器降低制动压力。由于 EBD 调节频率高、调节幅度小、控制精确,可使β线始终位于 I 线下方且无限接近于 I 线(图2-3所示)。因此 EBD 在保证制动稳定性的同时,使后轮获得了最大制动力,从而提高了整车的制动效能。 随着汽车工业的飞速发展和高速公路的迅速延伸, 汽车的行驶速度越来越快, 对汽车行驶安全性的要求也愈来愈高, 改善汽车的制动性能始终是汽车设计、制造部门的重要任务。汽车制动防抱死系统(ABS)和电子制动力分配系统(EBD)在汽车上的开发成功, 使汽车的制动性能得到质的飞跃。ABS解决了汽车紧急制动时附着系数的利用,并可获得较好的制动方向稳定性及较短的制动距离,然而它不能解决制动系统中的所有缺陷。在车轮滑移率还没有达到ABS的控制范围时,作用在四个车轮上的制动压力同时一致增大,然而前后车轮上的垂直载荷发生了转移,前后车轮达到最佳滑移的时间并不一致,这时ABS系统对地面附着力的利用并没有达到最大。因此ABS就进一步发展衍生出了电子制动力分配系统(EBD)。EBD是ABS的一种辅助系统,在ABS系统的基础上增加了功能。装载有EBD的汽车性能要远高于只有ABS的汽车,见图2-4。 图2-4有无EBD时车辆制动性能对比图 EBD 相对于 ABS 并没有任何硬件上的附加,而只是控制程序、功能上的优化与增强,甚至可以说 EBD 是 ABS 衍生出的辅助功能,通过改进,增强ABS 电脑软件控制逻辑,使运算功能更复杂,在一些汽车的产品说明书上就是以“ABS+EBD”来标明。汽车工程师们除了在编著电脑运算程序时需增加一定的控制程序之外,并没有过多的硬件投入。EBD 在制动时能根据车辆各个车轮的运动状态,智能分配各个车轮制动力大小,以维持车辆在制动状态下的平稳与方向。而且,即使 ABS 失效,EBD 也能保证车辆不会出现因甩尾而导致翻车等恶性事件的发生。 EBD 在汽车制动时即开始控制制动力,而 ABS 则是在车轮有抱死倾向时开始工作。ABS 与 EBD 都是对作用在车轮上的力矩进行控制,能防止车轮相对于
车辆主动悬架最优控制讲课稿
车辆主动悬架最优控 制
车辆主动悬架的控制研究 悬架是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。目前,汽车上普遍采用的是弹性元件和减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。实践和研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只是将其性能改善到一定程度。为了克服常规悬架对其性能改善的限制,在汽车中采用和发展了新型的主动悬架。主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。主动悬架的主要特点是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。 一、 车辆主动悬架系统建模 主动悬架的分析模型如图3.3所示,图中u 为主动悬架执行机构的作用力。 主动悬架的运动微分方程为: ????? ---==)(01..11.. 22x x k u x m u x m t (1) 状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω, 根据微分方程组(1),建立如下所示的状态方程和输出方程 ?????+=++=Eu Cx y t D Bu Ax x )(ω。 (2)
式中: ????????????? ?--=00 01000 000010101 m k A t ;????????????????-=121010m m B ;????????????=0100D ; ??????????=010*********C ;???? ??????????=0012m E 汽车悬架可认为是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。这两部分参数可分别加以确定。对于控制要求的性能指标是二次函数积分型的调节器问题,外界干扰是高斯白噪声,综合性能指标为: dt t u t R t u t X t Q t X u J T T ?∞ +=0)]()()()()()([)( (3) 此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍是寻找最优控制)(t u ,使目标函数J 取极小。线性调节器的主要问题之一是如何选择Q 、R 阵以获得比较满意的控制过程动态响应,计算机仿真可以解决这个问题。 在悬架设计中,为提高汽车的操纵稳定性和行驶平顺性,应使簧载质量垂直加速度、悬架动扰度及轮胎动变形较小。此外,从实现控制的角度来看,应使所需的控制能量较小。因此式(3)可写为 ?∞ +-+-=022*******])()([dt Ru x x q x x q J (4) 或写为 ?∞ +=0 2][dt Ru QX X J T (5) 其中 ?????? ??? ???=00 000000000001 2 q q Q 这里,q 1——轮胎动变形加权系数
汽车主动悬架控制系统的发展研究
目录 1引言1 2汽车悬架系统的类型和应用1 2.1被动悬架1 2.2主动悬架2 2.3半主动悬架2 3主动悬架控制系统国内外研究现状2 4汽车悬架的控制策略3 4.1天棚阻尼与开关阻尼控制3 4.2随机线性二次最优控制3 4.3模糊控制4 4.4神经网络控制4 4.5预测控制4 4.6滑模变结构控制5 4.7复合控制5 5控制方法的展望5 5.1注重控制策略的综合运用5 5.2注重汽车其他系统与主动悬架系统的联合控制研究5 5.3注重悬架系统模型的降阶研究6 6结论6 参考文献:6
汽车主动(半主动)悬架控制系统的 研究发展 1引言 汽车主动悬架目前是国内外研究的热点问题,研究的关键技术主要在控制策略的选择上及执行器的研发方面。国外由于成本问题,一些油气主动悬架也仅限用在一些高级轿车上,国内在此方面还处在研发及试验阶段,离主动悬架系统普遍使用在轿车上的时代还较远。 2汽车悬架系统的类型和应用 悬架是车架与车桥之间一切传力装置的总称,它的主要功用是传递作用在车轮和车架之间的力和力矩,缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能平顺行驶。衡量悬架性能好坏的主要指标是汽车行驶的平顺性; 即乘坐舒适性和操纵稳定性,但这两个方面是相互排斥的性能要求。由于被动悬架的刚度和阻尼系数是固定的,无法根据不同的使用要求自适应地改变,在结构设计上只能是满足平顺性和操纵稳定性之间矛盾的折衷。 为服这个缺陷,国外在五十年代提出了“主动悬架”的概念。主动悬架的特点是能根据外界输入或车辆本身状态的变化进行动态自适应调节。主动悬架包控制单元和力发生器,力发生器的作用下使悬架的特性得到控制,如同改变了悬架的刚度和阻尼系数,其中最关键的是控制算法的优劣。 2.1被动悬架 被动悬架, 由弹性元件和不可变参数的减振器组成, 只能在特定工况下达到最优, 缺少对变载荷、变车速、不可预测路况的适应性。被动悬架是传统的机械结构,由弹簧、减震器和导向机构组成。被动悬架的刚度和阻尼系数均不可调,只能在特定的工况下达到最优减振效果,存在明显的共振峰,难以同时获得良好的乘坐舒适性和操纵稳定性,缺乏灵活性。但被动悬架因结构简单、设计容易和制造方便,且无须额外的能量输入,目前在中低档轿车上应用最为广泛[1]。为了进一步改善被动悬架的减振效果,满足现代汽车对悬架提出的更高的性能要求,在桑塔纳、夏利和赛欧等轿车上加强了通过优化寻找最优悬架参数和对悬架导向机构的研究,采用了带有横向稳定杆的多连杆机构悬架系统,在一定程度上改善了被动悬架减振效果。
汽车主动安全控制方法
(1)随着科技的进步,汽车的安全被细化,目前汽车安全分为主动安全、被动安全两种概念[1]。交通安全问题已成为世界性的大问题。全世界每年因交通事故死亡的人数约50万,汽车的安全性对人类生命财产的影响是不言而喻的。随着高速公路的发展和汽车性能的提高,汽车行驶速度也相应加快,加之汽车数量增加以及交通运输日益繁忙,汽车事故增多所引起的人员伤亡和财产损失,已成为一个不容忽视的社会问题,汽车的行车安全更显得非常重要[2]。传统的被动安全已经远远不能避免交通的事故发生,主动安全的概念慢慢的行成并不断的完善。 (2)为预防汽车发生事故,避免人员受到伤害而采取的安全设计,称为主动安全设计,如ABS,EBD,TCS,LDWS等都是主动安全设计。它们的特点是提高汽车的行驶稳定性,尽力防止车祸发生。其它像高位刹车灯,前后雾灯,后窗除雾等也是主动安全设计。目前安全技术逐渐在完善,有更多的安全技术将被开发并得到应用[3,4]。 ①ABS(防抱死制动系统)——它通过传感器侦测到的各车轮的转速,由计算机计算出当时的车轮滑移率,由此了解车轮是否已抱死,再命令执行机构调整制动压力,使车轮处于理想的制动状态(快抱死但未完全抱死)。对ABS功能的正确认识:能在紧急刹车状况下,保持车辆不被抱死而失控,维持转向能力,避开障碍物。在一般状况下,它并不能缩短刹车距离。 ②EBD(电子制动力分配系统)——它必须配合ABS使用,在汽车制动的瞬间,分别对四个轮胎附着的不同地面进行感应、计算,得出摩擦力数值,根据各轮摩擦力数值的不同分配相应的刹车力,避免因各轮刹车力不同而导致的打滑,倾斜和侧翻等危险。 ③ESP(电子稳定程序)——它实际上也是一种牵引力控制系统,与其它牵引力控制系统比较,ESP不但控制驱动轮,而且控制从动轮。它通过主动干预危险信号来实现车辆平稳行驶。如后轮驱动汽车常出现的转向过多情况,此时后轮失控而甩尾,ESP便会放慢外侧的前轮来稳定车子;在转向过少时,为了校正循迹方向,ESP则会放慢内后轮,从而校正行驶方向。 ④EBA(紧急刹车辅助系统)——电脑根据刹车踏板上侦测到的刹车动作,来判断驾驶员对此次刹车的意图,如属于紧急刹车,则指示刹车系统产生更高的油压使ABS发挥作用,从而使刹车力更快速的产生,缩短刹车距离。 ⑤LDWS(车道偏离预警系统)——该系统提供智能的车道偏离预警,在无意识(驾驶员未打转向灯)偏离原车道时,能在偏离车道0.5秒之前发出警报,为驾驶员提供更多的反应时间,大大减少了因车道偏离引发的碰撞事故,此外,使用LDWS还能纠正驾驶员不打转向灯的习惯,该系统其主要功能是辅助过度疲劳或长时间单调驾驶引发的注意力不集中等情况。 ⑥胎压监控——美国国家公路交通安全管理局(NHTSA) 已经做出要求,截止2003产品年车重小于或达到4536公斤的所有美国乘用车辆都必须配备胎压监控系统,事后宝马公司就已经把该系统用在全系轿车中。驾驶者可以通过车内提示警告系统来判断轮胎胎压情况是否正常,首先避免了因轮胎亏气出现的行车跑偏,其次在高速行驶时也对乘坐者安全是一种保障。 ⑦倒车警告/倒车影像/车外摄像头——倒车警告这项技术用于在驾驶期间以及驻车时,针对您盲区中的轿车或物体向您发出警告。通常,该系统会在您行车时已经进行响应;它可能会使后视镜内的一个警告标示进行闪烁,同时会发出声音警告,该系统是一个短程检测系统。如:上海通用别克君越车内后视镜就配备此功能,反光镜左边会有一个车体形状的图标,前/后雷达在侦测障碍物时警告
悬架技术现状及发展趋势
悬架技术现状及发展趋势 李辰20071099 车辆工程1班03110701 悬架系统是汽车的重要组成部分之一。汽车悬架系统是指连接车身和车轮之间全部零部件的总称,主要由弹簧、减振器和导向机构三大部分组成,其作用是传递车轮和车架之间的一切力和力矩,并且缓和由不平路面传给车架(或车身)的冲击载荷,衰减由此引起的承载系统的振动,以保证汽车的平顺行驶。当汽车行驶在不同路面上而使车轮受到随机振动时,由于悬架装置实现了车体和车轮之间的弹性支承,有效地抑制、降低了车体与车轮的动载和振动,从而保证汽车行驶的平顺性和操纵稳定性,达到提高平均行驶速度的目的。 舒适性是轿车重要的性能之一。舒适性与车身的固有振动特性有关,而车身的固有振动特性又与悬架的特性相关。所以,汽车悬架是保证乘坐舒适性的重要部件。同时,汽车悬架作为车架(或车身)与车轴(或车轮)之间作连接的传力机件,又是保证汽车行驶安全的重要部件。因此,轿车悬架往往列为重要部件编入轿车的技术规格表,作为衡量轿车质量的指标之一。 现代轿车的悬架都有减振器。当轿车在不平坦的道路上行驶,车身会发生振动,减振器能迅速衰减车身的振动,利用本身的油液流动的阻力来消耗振动的能量。人们为了更好地实现轿车的行驶平稳性和安全性,将阻尼系数不固定在某一数值上,而是能随轿车运行的状态而变化,使悬架性能总是处在最优的状态附近。因此,有些轿车的减振器是可调式的,将阻尼分成两级或三级,根据传感器信号自动选择所需要的阻尼级。 在现代轿车悬架上,麦弗逊式及烛式悬架都将螺旋弹簧和减振器组合在一起,这是因为乘坐的舒适性有赖于对冲击的缓冲和对冲击产生的振动的消减两个方面,缺一不可。只有缓冲没有消振只能暂时缓和冲击力的影响而不能最终使它消失;只有对振动的消减而没有缓冲则不能有效地避免冲击所造成的破坏。螺旋弹簧是缓冲元件,它具有不需润滑,不怕污垢,重量小且占空间位置少的优点。当路面对车轮的冲击力传到螺旋弹簧时,螺旋弹簧产生变形,吸收车轮的动能,转换为螺旋弹簧的位能(势能),从而缓和了地面的冲击对车身的影响。 但是,螺旋弹簧本身不消耗能量,储存了位能的弹簧将恢复原来的形状,把位能重新变为动能。如果单独使用弹簧而没有消振元件,汽车就会像杂技演员跳“蹦蹦床”一样,受到一次冲击后连续不断地上下运动。因此,螺旋弹簧与减振器组合使用是一种力学上的巧妙组合,充分利用二者的特点,能够即时缓冲地面的冲击,并在螺旋弹簧几个来回过程中拖动减振器活塞,驱动油液把大部分振动能量吸收掉,使得汽车迅速平稳下来。 为了提高轿车的舒适性,现代轿车悬架的垂直刚度值设计得较低,用通俗话来讲就是很“软”,这样虽然乘坐舒适了,但轿车在转弯时,由于离心力的作用会产生较大的车身倾斜角,直接影响到操纵的稳定性。为了改善这一状态,许多轿车的前后悬架增添横向稳定杆,当车身倾斜时,两侧悬架变形不等,横向稳定杆就会起到类似杠杆作用,使左右两边的弹簧变形接近一致,以减少车身的倾斜和振动,提高轿车行驶的稳定性。
主动悬架安全控制技术
主动悬架安全控制技术 【引言】主动控制悬架可使汽车乘坐舒适性和操纵安全性同时得到改善。介绍了国内外汽车主动悬架系统的现状及发展,重点介绍了几种常见的控制方法。 简介:悬架系统的主要作用是有效地减缓路面不平而引起的车体振动(乘坐舒适性)以及操纵安全性。随着汽车性能的不断完善与发展,对悬架也提出了更高的要求。为了满足现代汽车对悬架提出的各种性能要求,悬架的结构形式一直在不断地更新和完善,尽管这样,传统的被动悬架依然受到许多限制,主要是难于同时改善在不平路面上高速行驶车辆的稳定性和行驶平顺性,即使采用优化设计也只能保证悬架在特定的激励发生变化后,悬架的性能亦随之发生变化。事实上,被动悬架的潜力在目前已接近极限,为了克服传统的被动悬架对汽车性能改善的限制,近年来,汽车工业中出现的主动悬架成为了一条改善汽车悬架性能的新途径。主动悬架控制系统是一个闭环控制系统,它能根据系统的运动状态和当前的激励情况,主动做出反应来控制系统的振动,在控制过程中,可以根据外界输入。与系统状态的变化实时调节控制系统参数,以获得最好的减振效果。主动悬架通常可分为:有源主动悬架和无源主动悬架两大类。有源主动悬架一般又简称为主动悬架, 主动悬架一般由执行机构和控制决策部分构成。其基本原理是根据被控系统的动态特性,采用由外部输入能量的控制方法使被控系统实现减振。主动悬架系统的执行部分一般包括液压执行机构、动力源等,执行机构上装有控制器,它执行决策部分的命令。一般用力发生器完全地或部分地代替被动悬架中的弹簧和阻尼器。力的大小由控制规律决定。决策部分为一车载微机系统,包含各种传装置、测量仪器和信号反馈处理等系统。微机接收来自传感器的信号,经预定控制程序处理后,由控制器发出命令,决定执行机构所需的动作,从而形成闭环控制。 主动悬架具有如下显著优点: (1)在悬架静扰度较小的前提下,能获得较低的固有频率和动扰度。 (2)悬架的动力学特性,不随汽车的载荷变化而改变。
车辆主动悬架最优控制
车辆主动悬架的控制研究 悬架就是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。目前,汽车上普遍采用的就是弹性元件与减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。实践与研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只就是将其性能改善到一定程度。为了克服常规悬架对其性能改善的限制,在汽车中采用与发展了新型的主动悬架。主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。主动悬架的主要特点就是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。 一、 车辆主动悬架系统建模 主动悬架的分析模型如图3、3所示,图中u 为主动悬架执行机构的作用力。 主动悬架的运动微分方程为: ?????---==)(01..11..22x x k u x m u x m t (1) 状态变量、输出向量的选取同被动悬架,且为了便 于与被动悬架的比较分析,选取与被动悬架模型 相同的输入信号,路面激励仍为选白噪声)(t ω, 根据微分方程组(1),建立如下所示的状态方程与 输出方程 ?????+=++=Eu Cx y t D Bu Ax x )(ω。 (2) 式中: ??????????????--=0001000000010101m k A t ;????????????????-=121010m m B ;????????????=0100D ; ??????????=010*********C ;??????????????=0012m E 汽车悬架可认为就是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。这两部分参数可分别加以确定。对于控制要求的性能指标就是二次函数积分型的调节器问题,外界干扰就是高斯白噪声,综合性能指标为: dt t u t R t u t X t Q t X u J T T ?∞+=0)]()()()()()([)( (3) 此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍就是寻找最优控制)(t u ,使目标函数J 取极小。线性调节器的主要问题之一就是如何选择Q 、R 阵以获得比较满意的控制过程动态响应,计算机仿真可以解决这个问题。 在悬架设计中,为提高汽车的操纵稳定性与行驶平顺性,应使簧载质量垂直加速度、悬架
汽车主动安全技术论文
《汽车文化》结课论文论文题目:汽车主动安全技术 班级:11023801 专业:生物工程 姓名:万伟玮 学号:1102380117 序号:24 2013 年 5 月 11 日 成绩评定表 平时 论文 内容 总成绩摘要 参考文献 字数
汽车主动安全技术 摘要:交通安全问题已成为世界性的大问题。据报道,全世界每年因交通事故死亡的人数约50万,因此汽车的安全性对人类生命财产的影响是不言而喻的。随着高速公路的发展和汽车性能的提高,汽车行驶速度也相应加快,加之汽车数量增加以及交通运输日益繁忙,汽车事故增多所引起的人员伤亡和财产损失,已成为一个不容忽视的社会问题,汽车的行车安全更显得非常重要。 关键词:主动安全技术;智能;弊端。 正文: 一、汽车主动安全技术的背景与发展趋势 随着社会的发展,交通安全问题越来越凸显,传统的汽车安全理念也在逐渐发生变化,传统的安全理念很被动比如安全带、安全气囊、保险杠等多是些被动的方法并不能有效解决交通事故的发生,随着科技的进步,汽车的安全被细化,目前汽车安全分为主动安全、被动安全两种概念。 主动安全是指能够避免车祸发生的安全保护装置,而被动安全是指在车祸发生之后保护乘员生命安全的装置。显而易见,传统的被动安全已经远远不能避免交通的事故发生,因此主动安全的概念慢慢的行成并不断的完善。 汽车安全设计要从整体上来考虑,不仅要在事故发生时尽量减少乘员受伤的机率,而且更重要的是要在轻松和舒适的驾驶条件下帮助驾驶员避免事故的发生。而被动安全技术和主动安全技术是保证汽车乘员安全的重要保障。过去,汽车安全设计主要考虑被动安全系统,如设置安全带、安全气囊、保险杠等。现在汽车设计师们更多考虑的则是主动安全设计,使汽车能够主动采取措施,避免事故的发生。在这种汽车上装有汽车规避系统,包括装在车身各部位的防撞雷达、多普勒雷达、红外雷达等传感器、盲点探测器等设施,由计算机进行控制。在超车、倒车、换道、大雾、雨天等易发生危险的情况下随时以声、光形式向驾驶员提供汽车周围必要的信息,并可自动采取措施,有效防止事故发生。另外在计算机的存储器内还可存储大量有关驾驶员和车辆的各种信息,对驾驶员和车辆进行监测控制。例如,根据日
汽车悬架系统综述
汽车悬架系统综述 现代汽车中的悬架有两种,一种是从动悬架,另一种是主动悬架。 从动悬架即传统式的悬架,是由弹簧.减振器(减振筒).导向机构等组成,它的功能是减弱路面传给车身的冲击力,衰减由冲击力而引起的承载系统的振动。其中弹簧主要起减缓冲击力的作用,减振器的主要作用是衰减振动。由于这种悬架是由外力驱动而起作用的,所以称为从动悬架。 而主动悬架的控制环节中安装了能够产生抽动的装置,采用一种以力抑力的方式来抑制路面对车身的冲击力及车身的倾斜力。由于这种悬架能够自行产生作用力,因此称为主动悬架。 主动悬架是近几年发展起来的,由电脑控制的一种新型悬架,具备三个条件:(1)具有能够产生作用力的动力源; (2)执行元件能够传递这种作用力并能连续工作;(3)具有多种传感器并将有关数据集中到微电脑进行运算并决定控制方式。因此,主动悬架汇集了力学和电子学的技术知识,是一种比较复杂的高技术装置。 例如装置了主动悬架的法国雪铁龙桑蒂雅,该车悬架系统的中枢是一个微电脑,悬架上有5 种传感器,分别向微电脑传送车速.前轮制动压力.踏动油门踏板的速度.车身垂直方向的振幅及频率.转向盘角度及转向速度等数据。电脑不断接收这些数据并与预
先设定的临界值进行比较,选择相应的悬架状态。同时,微电脑独立控制每一只车轮上的执行元件,通过控制减振器内油压的变化产生抽动,从而能在任何时候.任何车轮上产生符合要求的悬架运动。因此,桑蒂雅桥车备有多种驾驶模式选择,驾车者只要扳动位于副仪表板上的“正常”或“运动”按钮,轿车就会自动设置在最佳的悬架状态,以求最好的舒适性能。 另外,主动悬架具有控制车身运动的功能。当汽车制动或拐弯时的惯性引起弹簧变形时,主动悬架会产生一个与惯力相对抗的力,减少车身位置的变化。例如德国奔驰2000 款CL 型跑车,当车辆拐弯时悬架传感器会立即检测出车身的倾斜和横向加速度,电脑根据传感器的信息,与预先设定的临界值进行比较计算,立即确定在什么位置上将多大的负载加到悬架上,使车身的倾斜减到最小。 汽车主动悬架悬架结构。 悬架作用悬架是汽车中的一个重要总成,它把车架与车轮弹性地联系起来,关系到汽车的多种使用性能。从外表上看,轿车悬架仅是由一些杆.筒以及弹簧组成,但千万不要以为它很简单,相反轿车悬架是一个较难达到完美要求的汽车总成,这是因为悬架既要满足汽车的舒适性要求,又要满足其操纵稳定性的要求,而这两方面又是互相对立的。比如,为了取得良好的舒适性,需要大大缓冲汽车的震动,这样弹簧就要设计得软些,但弹簧软了却容易使汽车发生刹车“点头”.加速“抬头”以及左右侧倾严重