单点交叉口信号控制

单点交叉口信号控制
——交通管理与控制作业
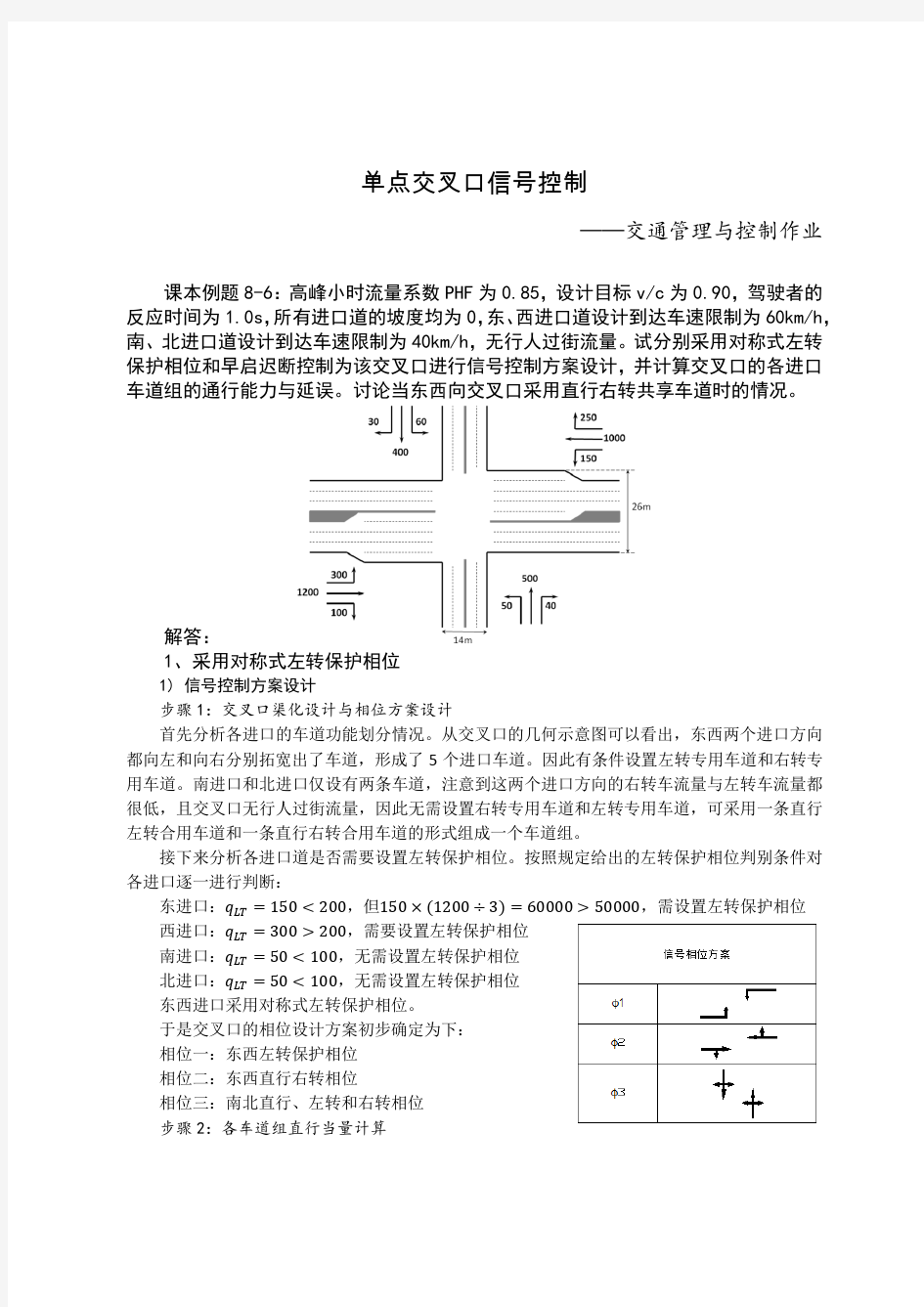
课本例题8-6:高峰小时流量系数PHF为0.85,设计目标v/c为0.90,驾驶者的反应时间为1.0s,所有进口道的坡度均为0,东、西进口道设计到达车速限制为60km/h,南、北进口道设计到达车速限制为40km/h,无行人过街流量。试分别采用对称式左转保护相位和早启迟断控制为该交叉口进行信号控制方案设计,并计算交叉口的各进口车道组的通行能力与延误。讨论当东西向交叉口采用直行右转共享车道时的情况。
解答:
1、采用对称式左转保护相位
1) 信号控制方案设计
步骤1:交叉口渠化设计与相位方案设计
首先分析各进口的车道功能划分情况。从交叉口的几何示意图可以看出,东西两个进口方向
都向左和向右分别拓宽出了车道,形成了5个进口车道。因此有条件设置左转专用车道和右转专用车道。南进口和北进口仅设有两条车道,注意到这两个进口方向的右转车流量与左转车流量都很低,且交叉口无行人过街流量,因此无需设置右转专用车道和左转专用车道,可采用一条直行左转合用车道和一条直行右转合用车道的形式组成一个车道组。
接下来分析各进口道是否需要设置左转保护相位。按照规定给出的左转保护相位判别条件对
各进口逐一进行判断:
东进口:q LT=150<200,但150×1200÷3=60000>50000,需设置左转保护相位
西进口:q LT=300>200,需要设置左转保护相位
南进口:q LT=50<100,无需设置左转保护相位
北进口:q LT=50<100,无需设置左转保护相位
东西进口采用对称式左转保护相位。
于是交叉口的相位设计方案初步确定为下:
相位一:东西左转保护相位
相位二:东西直行右转相位
相位三:南北直行、左转和右转相位
步骤2:各车道组直行当量计算
查表可获得各进口道各转向车流的直行当量系数,计算得出各车道组的直行车流当量。
步骤3:流率比分析和关键车流确定
绘制信号相位设计方案的相序图可控制图,并按照上表计算结果给各相位的车道组标上直行当量,然后分析比较,确定各相位的关键车流及其流量值,具体过程如图所示:
交叉口各进口车道宽度为:东西进口车道宽度为3.25m,南北进口车道宽度为3.5m,均大于3.0m,无纵坡,符合理想条件,因此直行道饱和流率值为1650veh/h。于是,各相位的关键流率比如下:
y1=q1/S T=315/1650=0.191
y2=q2/S T=400/1650=0.242
y3=q3/S T=349/1650=0.212
各相位关键流率比之和为:Y=y1+y2+y3=0.191+0.242+0.212=0.645<0.9,满足要求,可以进行下一步设计。
步骤4:确定黄灯时间和红灯时间
应用公式分别计算黄灯时长和红灯时长。分析时,东西进口车道的车速采用设计车速限制值60km/h计算,南北进口车道的车速采用设计车速限制值40km/h计算。各相位黄灯时长计算结果如下:
A1,2=t+υ85
=1.0+
60/3.6
=3.8s
A3=t+
υ85
2a+19.6g
=1.0+
40/3.6
2×3.0+0
=2.9s
为计时方便,对黄灯时长取整,A1,2=4s,A3=3s。
全红时长与交叉口道路宽度有关,因此,相位一、二与相位三的全红时长不同,应分开计算。考虑到该交叉口无行人过街需求,全红时长的确定无需考虑人行过街横道的宽度。具体计算过程如下:
r1,2=w+L
υ0
=
14+5
60
3.6
=1.14s
r3=w+L
υ0
=
26+5
40
3.6
=2.79s
式中5m为车辆平均长度。为计时方便,相位一、二的全红时长取整数1s,相位三的全红时长取整数3s。
因此,各相位的绿灯时间间隔为:
I1=A+r=4+1=5s
I2=A+r=4+1=5s
I3=A+r=3+3=6s
步骤5:确定信号损失时间
一个周期的信号损失时间由所有相位的启动损失及全红时间组成。在没有实测数据的情况下,一般启动损失取3s,于是各相位的信号损失时间为:
L1,2=3+1=4s
L3=3+3=6s
一个周期的总信号损失时间为各相位信号损失时间之和,于是一个周期的总信号损失时间为:
L=L1+L2+L3=4+4+6=14s
步骤6:确定信号周期时长
根据实用信号周期公式,该交叉口的信号周期为:
C p=
L
1?Y
PHF×υ
=
14
1?0.645
0.85×0.90
=89.25s
为了便于控制,对计算周期取整,则得到信号周期时长为C=90s。步骤7:绿时分配
各相位的有效绿灯时长为:
g E,1=C?L y1
=90?14×
0.191
=22.5s
g E,2=C?L y2
Y
=90?14×
0.242
0.645
=28.5s
g E,3=C?L y3
Y
=90?14×
0.212
0.645
=25.0s
计算各相位绿灯显示时间并取整可得:
g1=g E,1+?1?A1=22.5+3?4=21.5≈22s
g2=g E,2+?2?A2=28.5+3?4=27.5≈28s
g3=g E,3+?3?A3=25.0+3?3=25.0≈25s
考虑到在对绿灯显示时间取整过程中可能出现误差,因此对绿灯显示时间、黄灯时间和全红时间进行累加,检验是否与周期相等。
C′=22+4+1+28+4+1+25+3+3=91s
检验发现相位信号时长比周期长多1s,故对相位二的绿灯显示时间进行调整,由28s减少为27s。因为无需考虑行人过街流量的影响,故至此完成了对该交叉口的信靠控制方案的设计。
设计结果如下:
2)交叉口的各进口车道组的通行能力与延误计算
步骤1:计算该交叉口的通行能力
东进口:
左转专用车道组:CAP1L=Sλ=1650×23
90
=422 pcu/h
直行车道组:CAP1Z=Sλ=3×1650×28
90
=1540pcu/h
右转专用车道组:CAP1R=Sλ=1650×28
90
=513pcu/h 西进口:
左转专用车道组:CAP2L=Sλ=1650×23
90
=422 pcu/h
直行车道组:CAP2Z=Sλ=3×1650×28
90
=1540pcu/h
右转专用车道组:CAP2R=Sλ=1650×28
90
=513pcu/h
南进口:CAP3=Sλ=2×1650×25
90
=917pcu/h
北进口:CAP4=Sλ=2×1650×25
90
=917pcu/h
步骤2:计算各进口车道组饱和度
东进口:
左转专用车道组:(v
c )1L=158
422
=0.37
直行车道组:(v
c )1Z=1000
1540
=0.65
右转专用车道组:(v
c )1R=295
513
=0.58
西进口:
左转专用车道组:(v
c )2L=315
422
=0.75
直行车道组:(v
c )2Z=1200
1540
=0.78
右转专用车道组:(v
c )2R=118
513
=0.23
南进口:(v
c )3=698
917
=0.76
北进口:(v
c )4=676
917
=0.74
步骤3:计算该交叉口的延误
均衡延误计算: 东进口:
左转专用车道组:d 1L 1=
0.5C 1?λ 21? min 1,v c
λ
=
0.5×90× 1?2390
21? min 1,0.37 ×23
90
=27.54s /pcu
s /pcu
直行车道组:d 1Z 1=
0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×90×(1?28/90)2
1?[min 1,0.65 ×28/90]
=26.77s /pcu
右转专用车道组:d 1R 1=0.5C (1?λ)
2
1?[min 1,v c
λ]
=
0.5×90×(1?28/90)2
1?[min 1,0.58 ×28/90]
=26.06s /pcu
西进口:
左转专用车道组:d 1L 2=
0.5C 1?λ 21? min 1,v λ
=
0.5×90× 1?2390
21? min 1,0.75 ×23
=30.85s /pcu
s /pcu
直行车道组:d 1Z 2=
0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×90×(1?28/90)2
1?[min 1,0.78 ×28/90]
=28.20s /pcu
右转专用车道组:d 1R 2=0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×90×(1?28/90)2
1?[min 1,0.23 ×28/90]
=23.00s /pcu
南进口:d 13=0.5C (1?λ)
2
1?[min 1,v c
λ]=0.5×90×(1?25/90)2
1?[min 1,0.76 ×25/90]=29.75s /pcu 北进口:d 14=
0.5C (1?λ)
2
1?[min 1,v c λ]
=
0.5×90×(1?25/90)2
1?[min 1,0.74 ×25/90]
=29.55s /pcu
随机附加延误计算: 东进口:
左转专用车道组:d 2L 1=900T x ?1 + x ?1 2+ 8?x QT
=900×0.25× 0.37?1 +
0.37?1 2+
8×0.5×0.37422×0.25
=2.48 s/pcu
直行车道组:d 2Z 1=900T x ?1 + x ?1 2+ 8?x
QT =900×0.25× 0.65?1 + 0.65?1 2+
8×0.5×0.651540×0.25
=2.14s/pcu
右转专用车道组:d 2R 1=900T x ?1 + x ?1 2+ 8?x QT
=900×0.25× 0.58?1 +
0.58?1 2+
8×0.5×0.58513×0.25
=4.73s/pcu
西进口:
左转专用车道组:d 2L 2=900T x ?1 + x ?1 2+ 8?x
QT =900×0.25× 0.75?1 + 0.75?1 2+
8×0.5×0.75422×0.25
=11.60/pcu
直行车道组:d2Z2=900T x?1+x?12+8?x
QT
=900×0.25×0.78?1+
0.78?12+8×0.5×0.78
1540×0.25
=3.98s/pcu
右转专用车道组:d2R2=900T x?1+x?12+8?x
QT
=900×0.25×0.23?1+
0.23?12+8×0.5×0.23
513×0.25
=1.04s/pcu
南进口:
d23=900T x?1+x?12+8?x
QT
=
900×0.25×0.76?1+0.76?12+8×0.5×0.76
917×0.25
=5.89s/pcu
北进口:
d24=900T x?1+x?12+8?x
QT
=
900×0.25×0.74?1+0.74?12+8×0.5×0.74
917×0.25
=5.34s/pcu
该交叉口各进口车道组的延误为:
东进口:
左转专用车道组:d=d1+d2=27.54+2.48=30.02s/pcu
直行车道组:d=d1+d2=26.77+2.14=28.91s/pcu
右转专用车道组:d=d1+d2=26.06+4.73=30.79s/pcu
平均延误:d=∑d i q i
∑q i =30.02×158+28.91×1000+30.79×295
1453
=29.41s/pcu
西进口:
左转专用车道组:d=d1+d2=30.85+11.60=42.45s/pcu 直行车道组:d=d1+d2=28.20+3.98=32.18s/pcu
右转专用车道组:d=d1+d2=23.00+1.04=24.04s/pcu
平均延误:d=∑d i q i
∑q i =42.45×315+32.18×1200+24.04×118
1633
=33.57s/pcu
南进口:d=d1+d2=29.75+5.89=35.64s/pcu 北进口:d=d1+d2=29.55+5.34=34.89s/pcu
2、采用早启迟断式信号控制
1) 信号控制方案设计
步骤1:交叉口渠化设计与相位方案设计
首先分析各进口的车道功能划分情况。从交叉口的几何示意图可以看出,东西两个进口方向都向左和向右分别拓宽出了车道,形成了5个进口车道。因此有条件设置左转专用车道和右转专用车道。南进口和北进口仅设有两条车道,注意到这两个进口方向的右转车流量与左转车流量都很低,且交叉口无行人过街流量,因此无需设置右转专用车道和左转专用车道,可采用一条直行左转合用车道和一条直行右转合用车道的形式组成一个车道组。
接下来分析各进口道是否需要设置左转保护相位。按照规定给出的左转保护相位判别条件对各进口逐一进行判断:
东进口:q LT=150<200,但150×1200÷3=60000>50000,需设置左转保护相位西进口:q LT=300>200,需要设置左转保护相位
南进口:q LT=50<100,无需设置左转保护相位
北进口:q LT=50<100,无需设置左转保护相位
考虑到东进口和西进口的左转车流量相差很大,因此可以考虑设置早启迟断式信号相位。
于是交叉口的相位设计方案初步确定为下:
相位一:东西向左转保护相位
相位二:西进口左转相位的延迟相位,同时开启西进口直行和右转相位
相位三:西进口方向直行和右转相位的延迟相位,同时是东进口的直行和右转相位
相位四:南北向的直行、左转和右转相位
步骤2:各车道组直行当量计算
步骤3:流率比分析和关键车流确定
绘制信号相位设计方案的相序图可控制图,并按照上表计算结果给各相位的车道组标上直行当量,然后分析比较,确定各相位的关键车流及其流量值,具体过程如图所示:
交叉口各进口车道宽度为:东西进口车道宽度为3.25m,南北进口车道宽度为3.5m,均大于3.0m,无纵坡,符合理想条件,因此直行道饱和流率值为1650veh/h。于是,各相位的关键流率比如下:
y=q/S T=649/1650=0.393
y4=q4/S T=349/1650=0.212
进一步,对控制链Ring1有:
y1+2=y×315/649=0.393×315/649=0.191
y3=y×334/649=0.393×334/649=0.202
对控制链Ring2有:
y1=y×158/558=0.393×158/558=0.111
y2+3=y×400/558=0.393×400/558=0.282
各相位关键流率比之和为:Y=y+y4=0.393+0.212=0.605<0.9,满足要求,可以进行下一步设计。
步骤4:确定黄灯时间和红灯时间
应用公式分别计算黄灯时长和红灯时长。分析时,东西进口车道的车速采用设计车速限制值60km/h计算,南北进口车道的车速采用设计车速限制值40km/h计算。各相位黄灯时长计算结果如下:
A1,2,3=t+υ85
=1.0+
60/3.6
=3.8s
A4=t+
υ85
2a+19.6g
=1.0+
40/3.6
2×3.0+0
=2.9s
为计时方便,对黄灯时长取整,A1,2=4s,A3=3s。
全红时长与交叉口道路宽度有关,因此,相位一、二与相位三的全红时长不同,应分开计算。考虑到该交叉口无行人过街需求,全红时长的确定无需考虑人行过街横道的宽度。具体计算过程如下:
r1,2,3=w+L
υ0
=
14+5
60
3.6
=1.14s
r4=w+L
υ0
=
26+5
40
3.6
=2.79s
式中5m为车辆平均长度。为计时方便,相位一、二的全红时长取整数1s,相位三的全红时长取整数3s。
因此,各相位的绿灯时间间隔为:
I1=A+r=4+1=5s
I2=A+r=4+1=5s
I3=A+r=4+1=5s
I4=A+r=3+3=6s
步骤5:确定信号损失时间
一个周期的信号损失时间由所有相位的启动损失及全红时间组成。在没有实测数据的情况下,一般启动损失取3s,于是各相位的信号损失时间为:
L1,2,3=3+1=4s
L4=3+3=6s
一个周期的总信号损失时间为各相位信号损失时间之和,于是一个周期的总信号损失时间为:L=L1+L3+L4=L2+L3+L4=4+4+6=14s
步骤6:确定信号周期时长
根据实用信号周期公式,该交叉口的信号周期为:
C p=
L
1?Y
PHF×υ
=
14
1?0.605
0.85×0.90
=66.94s
为了便于控制,对计算周期取整,则得到信号周期时长为C=70s。步骤7:绿时分配
控制链Ring1各相位的有效绿灯时长为:
g E,1+2=C?L y1+2
Y
=70?14×
0.191
0.605
=17.7s
g E,3=C?L y3
Y
=70?14×
0.202
0.605
=18.7s
g E,4=C?L y4
=70?14×
0.212
=19.6s
控制链Ring2各相位的有效绿灯时长为:
g E,1=C?L y1
Y
=70?14×
0.111
0.605
=10.3s
g E,2+3=C?L y2+3
=70?14×
0.282
=26.1s
g E,4=C?L y4
=70?14×
0.212
=19.6s
计算各相位绿灯显示时间并取整可得:
g1=g E,1+?1?A1=10.3+3?4=9.3≈9s
g1+2=g E,1+2+?2?A2=17.7+3?4=16.7≈17s
g2+3=g E,2+3+?3?A3=26.1+3?4=25.1≈25s
g3=g E,3+?3?A3=18.7+3?4=17.7≈18s
g4=g E,4+?4?A4=19.6+3?3=19.6≈20s
考虑到在对绿灯显示时间取整过程中可能出现误差,因此对绿灯显示时间、黄灯时间和全红时间进行累加,检验是否与周期相等。
控制链Ring1:C′=:17+4+1+18+4+1+20+3+3=71s
控制链Ring2:C′=:9+4+1+25+4+1+20+3+3=70s
检验发现控制链Ring1的信号时长比周期长多1s,故对控制链Ring1中的相位1+2的绿灯显
示时间进行调整,由17s减少为16s。因为无需考虑行人过街流量的影响,故至此完成了对该交叉口的信靠控制方案的设计。
设计结果如下:
2)交叉口的各进口车道组的通行能力与延误计算
步骤1:计算该交叉口的通行能力
东进口:
=236 pcu/h
左转专用车道组:CAP1L=Sλ=1650×10
70
=1344pcu/h
直行车道组:CAP1Z=Sλ=3×1650×19
70
=448pcu/h
右转专用车道组:CAP1R=Sλ=1650×19
70
西进口:
左转专用车道组:CAP 2L =Sλ=1650×17
70=401 pcu/h 直行车道组:CAP 2Z =S λ=3×1650×
2670
=1839pcu/h
右转专用车道组:CAP 2R =S λ=1650×26
70=613pcu/h 南进口:CAP 3=S λ=2×1650×20
70=943pcu/h 北进口:CAP 4=S λ=2×1650×
2070=943pcu/h
步骤2:计算各进口车道组饱和度 东进口:
左转专用车道组:(v
c )1L =
158236
=0.67
直行车道组:(v c
)1Z =
10001344
=0.74
右转专用车道组:(v
c )1R =295
448=0.66 西进口:
左转专用车道组:(v c )2L =315
401=0.78 直行车道组:(v c )2Z =1200
1839=0.65 右转专用车道组:(v c )2R =118
613=0.19 南进口:(v c )3=698
943=0.74 北进口:(v c )4=676
943=0.72 步骤3:计算该交叉口的延误 均衡延误计算: 东进口:
左转专用车道组:d 1L 1=
0.5C 1?λ 21? min 1,v c
λ
=
0.5×70× 1?1070
21? min 1,0.67 ×10
70
=28.44s /pcu
s /pcu
直行车道组:d 1Z 1=
0.5C (1?λ)
2
1?[min 1,v c λ]
=
0.5×70×(1?19/70)2
1?[min 1,0.74 ×19/70]
=23.25s /pcu
右转专用车道组:d 1R 1=0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×70×(1?19/70)2
1?[min 1,0.66 ×19/70]
=22.63s /pcu
西进口:
左转专用车道组:d 1L 2=0.5C 1?λ 21? min 1,v λ
=
0.5×70× 1?1770
21? min 1,0.78 ×17
=24.75s /pcu
直行车道组:d 1Z 2=
0.5C (1?λ)
2
1?[min 1,v
λ]
=0.5×70×(1?26/70)
2
1?[min 1,0.65 ×26/70]=18.23s /pcu
右转专用车道组:d 1R 2=0.5C (1?λ)
21?[min 1,v c
λ]
=
0.5×70×(1?26/70)2
1?[min 1,0.19 ×26/70]
=14.88s /pcu
南进口:d 13=0.5C (1?λ)
2
1?[min 1,v c
λ]=0.5×70×(1?20/70)2
1?[min 1,0.74 ×20/70]=22.64s /pcu 北进口:d 14=
0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×70×(1?20/70)2
1?[min 1,0.72 ×20/70]
=22.48s /pcu
随机附加延误计算: 东进口:
左转专用车道组:d 2L 1=900T x ?1 + x ?1 2+ 8?x
QT =900×0.25× 0.67?1 + 0.67?1 2+
8×0.5×0.67236×0.25
=14.14 s/pcu
直行车道组:d 2Z 1=900T x ?1 + x ?1 2+ 8?x QT
=900×0.25× 0.74?1 +
0.74?1 2+
8×0.5×0.74344×0.25
=3.70s/pcu
右转专用车道组:d 2R 1=900T x ?1 + x ?1 2+ 8?x QT
=900×0.25× 0.66?1 +
0.66?1 2+
8×0.5×0.66448×0.25
=7.44s/pcu
西进口:
左转专用车道组:d 2L 2=900T x ?1 + x ?1 2+ 8?x QT
=900×0.25× 0.78?1 +
0.78?1 2+
8×0.5×0.78401×0.25 =13.95/pcu
直行车道组:d 2Z 2=900T x ?1 + x ?1 2+ 8?x QT
=900×0.25× 0.65?1 +
0.65?1 2+
8×0.5×0.651839×0.25
=1.80s/pcu
右转专用车道组:d 2R 2=900T x ?1 + x ?1 2+ 8?x
QT =900×0.25× 0.19?1 + 0.19?1 2+
8×0.5×0.19613×0.25
=0.69s/pcu
南进口:
d23=900T x?1+x?12+8?x
QT
=
900×0.25×0.74?1+0.74?12+8×0.5×0.74
943×0.25
=5.20s/pcu
北进口:
d24=900T x?1+x?12+8?x
QT
=
900×0.25×0.72?1+0.72?12+8×0.5×0.72
943×0.25
=4.73s/pcu
该交叉口各进口车道组的延误为:
东进口:
左转专用车道组:d=d1+d2=28.44+14.14=42.58s/pcu
直行车道组:d=d1+d2=23.25+3.70=26.94s/pcu
右转专用车道组:d=d1+d2=22.63+7.44=30.07s/pcu
平均延误:d=∑d i q i
∑q i =42.58×158+26.94×1000+30.07×295
1453
=29.28s/pcu
西进口:
左转专用车道组:d=d1+d2=24.75+13.95=38.70s/pcu 直行车道组:d=d1+d2=18.23+1.80=20.03s/pcu
右转专用车道组:d=d1+d2=14.88+0.69=15.57s/pcu
平均延误:d=∑d i q i
∑q i =38.70×315+20.03×1200+15.57×118
1633
=23.31s/pcu
南进口:d=d1+d2=22.64+5.20=27.84s/pcu
北进口:d=d1+d2=22.48+4.73=27.21s/pcu
3、考虑东西向直右车道的对称式左转保护相位
1) 信号控制方案设计
步骤1:交叉口渠化设计与相位方案设计
首先分析各进口的车道功能划分情况。从交叉口的几何示意图可以看出,东西两个进口方向都向左和向右分别拓宽出了车道,形成了5个进口车道。因此有条件设置左转专用车道和右转专用车道,本方案采用一条左转专用车道、三条直行车道和一条直右车道组合。南进口和北进口仅设有两条车道,注意到这两个进口方向的右转车流量与左转车流量都很低,且交叉口无行人过街流量,因此无需设置右转专用车道和左转专用车道,可采用一条直行左转合用车道和一条直行右转合用车道的形式组成一个车道组。
接下来分析各进口道是否需要设置左转保护相位。按照规定给出的左转保护相位判别条件对各进口逐一进行判断:
东进口:q LT=150<200,但150×1200÷3=60000>50000,需设置左转保护相位西进口:q LT=300>200,需要设置左转保护相位
南进口:q LT=50<100,无需设置左转保护相位北进口:q LT=50<100,无需设置左转保护相位
于是交叉口的相位设计方案初步确定为下:
相位一:东西左转保护相位
相位二:东西直行右转相位
相位三:南北直行、左转和右转相位
步骤2:各车道组直行当量计算
步骤3:流率比分析和关键车流确定
绘制信号相位设计方案的相序图可控制图,并按照上表计算结果给各相位的车道组标上直行当量,然后分析比较,确定各相位的关键车流及其流量值,具体过程如图所示:
交叉口各进口车道宽度为:东西进口车道宽度为3.25m,南北进口车道宽度为3.5m,均大于3.0m,无纵坡,符合理想条件,因此直行道饱和流率值为1650veh/h。于是,各相位的关键流率比如下:
y1=q1/S T=315/1650=0.191
y2=q2/S T=330/1650=0.200
y3=q3/S T=349/1650=0.212
各相位关键流率比之和为:Y=y1+y2+y3=0.191+0.200+0.212=0.603<0.9,满足要求,可以进行下一步设计。
步骤4:确定黄灯时间和红灯时间
应用公式分别计算黄灯时长和红灯时长。分析时,东西进口车道的车速采用设计车速限制值60km/h计算,南北进口车道的车速采用设计车速限制值40km/h计算。各相位黄灯时长计算结果如下:
A1,2=t+υ85
=1.0+
60/3.6
=3.8s
A3=t+υ85
=1.0+
40/3.6
=2.9s
为计时方便,对黄灯时长取整,A1,2=4s,A3=3s。
全红时长与交叉口道路宽度有关,因此,相位一、二与相位三的全红时长不同,应分开计算。考虑到该交叉口无行人过街需求,全红时长的确定无需考虑人行过街横道的宽度。具体计算过程如下:
r1,2=w+L
=
14+5
60
3.6
=1.14s
r3=w+L
=
26+5
40
3.6
=2.79s
式中5m为车辆平均长度。为计时方便,相位一、二的全红时长取整数1s,相位三的全红时长取整数3s。
因此,各相位的绿灯时间间隔为:
I1=A+r=4+1=5s
I2=A+r=4+1=5s
I3=A+r=3+3=6s
步骤5:确定信号损失时间
一个周期的信号损失时间由所有相位的启动损失及全红时间组成。在没有实测数据的情况下,一般启动损失取3s,于是各相位的信号损失时间为:
L1,2=3+1=4s
L3=3+3=6s
一个周期的总信号损失时间为各相位信号损失时间之和,于是一个周期的总信号损失时间为:
L=L1+L2+L3=4+4+6=14s
步骤6:确定信号周期时长
根据实用信号周期公式,该交叉口的信号周期为:
C p=
L
1?Y
PHF×υ
c
=
14
1?0.603
0.85×0.90
=66.11s
为了便于控制,对计算周期取整,则得到信号周期时长为C=70s。步骤7:绿时分配
各相位的有效绿灯时长为:
g E,1=C?L y1
=70?14×
0.191
=17.7s
g E,2=C?L y2
=70?14×
0.200
=18.6s
g E,3=C?L y3
=70?14×
0.212
=19.7s
计算各相位绿灯显示时间并取整可得:
g1=g E,1+?1?A1=17.7+3?4=16.7≈17s
g2=g E,2+?2?A2=18.6+3?4=17.6≈18s
g3=g E,3+?3?A3=19.7+3?3=19.7≈20s
考虑到在对绿灯显示时间取整过程中可能出现误差,因此对绿灯显示时间、黄灯时间和全红时间进行累加,检验是否与周期相等。
C′=17+4+1+18+4+1+20+3+3=71s
检验发现信号时长比周期长多1s,故对相位二的绿灯显示时间进行调整,由18s减少为17s。因为无需考虑行人过街流量的影响,故至此完成了对该交叉口的信靠控制方案的设计。
设计结果如下:
2)交叉口的各进口车道组的通行能力与延误计算
步骤1:计算该交叉口的通行能力
东进口:
=424pcu/h
左转专用车道组:CAP1L=Sλ=1650×18
70
=1697pcu/h
直行、直右车道组:CAP1Z=Sλ=4×1650×18
70
西进口:
=424 pcu/h
左转专用车道组:CAP2L=Sλ=1650×18
70
=1697pcu/h
直行、直右车道组:CAP2Z=Sλ=4×1650×18
70
=943pcu/h
南进口:CAP3=Sλ=2×1650×20
70
=943pcu/h
北进口:CAP4=Sλ=2×1650×20
70
步骤2:计算各进口车道组饱和度 东进口:
左转专用车道组:(v
c )1L =158
424=0.37 直行、直右车道组:(v
c )1Z =1295
1697=0.76 西进口:
左转专用车道组:(v
c )2L =315424=0.74 直行、直右车道组:(v
c )2Z =
13181697
=0.78
南进口:(v c
)3=
698943=0.74 北进口:(v
c
)4=
676943
=0.72
步骤3:计算该交叉口的延误 均衡延误计算: 东进口:
左转专用车道组:d 1L 1=
0.5C 1?λ 21? min 1,v λ
=
0.5×70× 1?1870
21? min 1,0.37 ×18
=21.35s /pcu
s /pcu
直行、直右车道组:d 1Z 1=0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×70×(1?18/70)2
1?[min 1,0.76 ×18/70]
=24.01s /pcu
西进口:
左转专用车道组:d 1L 2=
0.5C 1?λ 21? min 1,v c
λ
=
0.5×70× 1?1870
21? min 1,0.74 ×18
70
=23.85s /pcu
s /pcu
直行、直右车道组:d 1Z 2=0.5C (1?λ)
2
1?[min 1,v c
λ]
=
0.5×70×(1?18/70)2
1?[min 1,0.78×18/70]
=24.16s /pcu
南进口:d 13=0.5C (1?λ)
2
1?[min 1,v c λ]=0.5×70×(1?20/70)2
1?[min 1,0.74 ×20/70]=22.64s /pcu 北进口:d 14=
0.5C (1?λ)
2
1?[min 1,v λ]
=
0.5×70×(1?20/90)2
1?[min 1,0.72 ×20/70]
=22.48s /pcu
随机附加延误计算: 东进口:
左转专用车道组:d 2L 1=900T x ?1 + x ?1 2+ 8?x
QT =900×0.25× 0.37?1 + 0.37?1 2+
8×0.5×0.37424×0.25
=2.47 s/pcu
交通灯控制器的设计
交通灯控制器的设计 LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】
电子设计自动化实训说明书 题目:交通灯控制器的设计 系部:信息与控制工程学院 专业:电子信息工程 班级: 06级1班 学生姓名: 朱清美学号: 015 指导教师:张建军 2009年12月21日 目录 1摘要............................................................... 2设计任务与要求..................................................... 3设计原理及框图..................................................... 4单元电路设计及仿真调试............................................. 状态控制器的设计................................................ 状态译码器设计及仿真调试........................................ 定时系统设计及仿真调试.......................................... 秒脉冲发生器设计................................................ 5个人总结 (14) 6参考文献........................................................... 1摘要: 分析了现代城市交通控制与管理问题的现状,结合城乡交通的实际情况阐述了交通灯控制系统的工作原理,给出了一种简单实用的城市交通灯控制系统的硬件电路设计方案。关键词:交通控制交通灯时间发生器定时器1 引言随着社会经济的发展,城市交通问题越来越引起人们的关注。人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。城市交通控制系统是用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,它是现代城市交通监控指挥系统中最重要的组成部分。随着城市机动车量的不断增加,许多大城市如北京、上海、南京等出现了交通超负荷运行的情况,因此,自80年代后期,这些城市纷纷修建城市高速道路,在高速道
vissim交叉口仿真教学教程(新手教学活动,步骤截图全过程)
VISSIM交叉口仿真教程(新手版)适合:第一次接触者使用 概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表1 选取编辑选项
图表2 如图读取背景图片 图表3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网:
使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖 第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线
依此连接所有可行的link,为下一步输入车流打好基础。 第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径:
使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果: 图中的红线和绿线即为点击右键的位置。如此,车辆可以向三个方向运行了。当然,必须之前连好的link之间才可以设置路径。 第六步:给出信号灯配时: 首先选取最上边菜单栏的信号控制中的编辑信号控制机选项,得到下图:
基于51单片机的十字路口交通灯控制系统设计(含源码及仿真图)
课程设计任务书 专业计算机科学与技术 班级09计(嵌入式系统方向)姓名江海洋 学号0905101072 指导教师刘钰 金陵科技学院教务处制
摘要 本文介绍了一个基于MCS-51及PROTEUS的十字路口交通灯控制系统的设计与仿真,通过对现实路况交通灯的分析研究,理解交通控制系统的实现方法。 十字路口交通灯控制系统通常要实现自动控制和在紧急情况下禁止普通车辆,而让紧急车辆优先通行。本文还对MCS-51单片机的结构特点和重要引脚功能进行了介绍,同时对智能交通灯控制系统的设计进行了详细的分析。最后介绍了PROTEUS嵌入式系统仿真与开发平台的使用方法,利用Proteus 软件对交通灯控制系统进行了仿真,仿真结果表明系统工作性能良好。 关键字:单片机,proteus仿真,中断,十字路口交通灯控制系统
前言 1,十字路口的交通控制系统指挥着人和各种车辆的安全运行,对交叉口实行科学的管理与控制是交通控制工程的重要研究课题,是保障交叉口的交通安全和充分发挥交叉口的通行能力的重要措施,是解决城市交通问题的有效途径。交通灯信号灯的出现是人类历史上的一次重大改革,使人类的聚居生活,产生了深远的影响。使交通得以有效管制,对于疏导交通流量,提高道路通行能力,减少交通事故有明显效果。如何采用合适的控制方法,最大限度利用好耗费巨资修建的城市高速道路,缓解主干道与匝道、城区同周边地区的交通拥堵状况,越来越成为交通运输管理和城市规划部门亟待解决的主要问题。随着电子技术的发展,利用单片机技术对交通灯进行智能化管理,已成为目前广泛采用的方法。 2,此十字路口交通灯控制系统,分东西道和南北道,设东西道为A道,南北道为B 道。规定:A道放行时间为2分钟,B道放行1.5分钟;绿灯放行,红灯停止;绿灯转红灯时,黄灯亮2秒钟;若有紧急车辆要求通过时,此系统应能禁止普通车辆,而让紧急车辆通过。 3,应用单片机实现对交通灯的控制,在十字路口用红,黄,绿的指示灯,加上四个以倒计时显示的数码管来控制交通。考虑到紧急车辆,设计紧急车辆开关。
新型智能交通信号控制系统(终)
新型智能交通信号控制系统 报名号:BS2011-B241设计者:GARDING指导教师:匿名 摘要:本作品针对当前日益严重的交通拥堵问题,以EXP-89S51单片机为核心,设计出了一种新型智能交通信号控制系统,实现了对交通信号灯的实时智能控制。该新型控制系统在控制方案上采用了我们自主设计的新型两级模糊控制方案,该方案是一种同时具有自适应控制、分级模糊控制、相位繁忙优先和准确显时等优势的控制方案,更适用于实际的交通情况,且已获国家实用新型专利和相关论文已在科技核心期刊《现代电子技术》上发表。在软件设计上,采用了MATLAB和VB进行动态模拟,并与当前正在采用的几种控制方案进行了对比验证,验证了新方案的优越性。在硬件设计上,我们采用了EXP-89S51单片机、SP-MDCE25A 交通灯模组、E-TRY通用板和倒计时LED数码管模块等,并搭建了较好的逼真的外围平台来对其实现更具真实性的实时控制。该作品不论是在创新性、实用性、技术先进性,还是在可靠性、经济性上都具有很强的优势。 关键词:智能交通信号新型两级模糊控制 VB动态模拟 EXP-89S51单片机 1、系统总体方案介绍 1.1自主提出的新型智能交通信号控制的总控制系统原理 我们自主提出的新型智能交通信号控制的总控制系统原理如图1所示: 图1自主提出的新型智能交通信号控制的总控制系统原理图在该系统中,交叉口的交通参数经检测装置检测,将被测参数转换成统一的标准电信号,再经A/D转换器进行模数转换,转换后的数字量通过I/O接口电路送入新型两级模糊控制器再到控制台。 在新型两级模糊控制器和控制台内部,用软件对采集的数据进行处理和计算,然后经数字量输出通道输出。输出的数字量通过D/A转换器转换成模拟量,再经驱动模块对交通情况进行控制,从而实现对交叉口的实时智能交通控制。 1.2 基于EXP-89S51单片机的新型智能交通信号控制系统的总控制系统设计 本系统运用我们的新型两级模糊控制方案,采用了EXP-89S51来控制智能交通系统。系统的整体结构框图如图2所示:
基于FPGA下的交通灯控制器设计
引言 随着城乡的经济发展,车辆的数量在迅速的增加,交通阻塞的问题已经严重影响了人们的出行。 现在的社会是一个数字化程度相当高的社会,很多的系统设计师都愿意把自己的设计设计成集成电路芯片,芯片可以在实际中方便使用。随着EDA技术的发展,嵌入式通用及标准FPGA器件的呼之欲出,片上系统(SOC)已经近在咫尺。FPGA/CPLD 以其不可替代的地位及伴随而来的极具知识经济特征的IP芯片产业的崛起,正越来越受到业内人士的密切关注。FPGA就是在这样的背景下诞生的,它在数字电路中的地位也越来越高,这样迅速的发展源于它的众多特点。交通等是保障交通道路畅通和安全的重要工具,而控制器是交通灯控制的主要部分,它可以通过很多种方式来实现。在这许许多多的方法之中,使用FPGA和VHDL语言设计的交通灯控制器,比起其他的方法显得更加灵活、易于改动,并且它的设计周期性更加短。 城市中的交通事故频繁发生,威胁着人们的生命健康和工作生活,交通阻塞问题在延迟出行时间的同时,还会造成更多的空气污染和噪声污染。在这种情况下,根据每个道路的实际情况来设置交通灯,使道路更加通畅,这对构建和谐畅通的城市交通有着十分重要的意义。
第一章软件介绍 1.1 QuartusⅡ介绍 本次毕业设计是基于FPGA下的设计,FPGA是现场可编程门阵列,FPGA开发工具种类很多、智能化高、功能非常的强大。可编程QuartusⅡ是一个为逻辑器件编程提供编程环境的软件,它能够支持VHDL、Verilog HDL语言的设计。在该软件环境下,设计者可以实现程序的编写、编译、仿真、图形设计、图形的仿真等许许多多的功能。在做交通灯控制器设计时选择的编程语言是VHDL语言。 在这里简单的介绍一下QuartusⅡ的基本部分。图1-1-1是一幅启动界面的图片。在设计前需要对软件进行初步的了解,在图中已经明显的标出了每一部分的名称。 图 1-1-1 启动界面 开始设计前我们需要新建一个工程,首先要在启动界面上的菜单栏中找到File,单击它选择它下拉菜单中的“New Project Wizard”时会出现图1-1-2所显示的对话框,把项目名称按照需要填好后单击Next,便会进入图 1-1-3 显示的界面。
交通灯信号控制器仿真设计
交通灯信号控制器仿真设计 08机电2班 张丽云 0811116041 1.前言 城市十字交叉路口为确保车辆、行人安全有序地通过,都设有指挥信号灯。交通信号灯的出现,使交通得以有效地管制,对于疏导交通、减少交通事故有明显的效果。现有2条主干道汇合点形成十字交叉口,为确保车辆安全、迅速的通行,在交叉路口的每条道上设置一组交通灯,交通灯由红、黄、绿3色组成。红灯亮表示此通道禁止车辆通过路口;黄灯亮表示此通道未过停车线的车辆禁止通行,已过停车线的车辆继续通行;绿灯亮表示该通道车辆可以通行。要求设计一交通灯控制电路以控制十字路口两组交通灯的状态转换,指挥车 由表1可以得出信号灯状态的逻辑表达式: A G =n Q 1n Q 0 A Y =n Q 1n Q 0 A R =n Q 1
B G =n Q 1n Q 0 B Y =n Q 1n Q 0 B R =n Q 1 由特性方程: 10+n Q = n Q 1n Q 0+n Q 1n Q 0 11+n Q = n Q 1n Q 0+n Q 1n Q 0 1+n Q = J n Q +K n Q 可得 0J =n Q 1,0K =n Q 1;1J =n Q 0,1K =n Q 0 要实现45s 的倒计时,需选用两个74190芯片级联成一个从99到00的计数器,其中作为个位数的74190芯片的CLK 接秒脉冲发生器,再把个位数74190芯片输出端A Q 、D Q 用一个与门连起来,再接在十位数74190芯片的CLK 端。当个位数减到0时,再减1就会变成9,0(0000)和9(1001)之间的A Q 、D Q 同时由0变为1,把A Q 、D Q 与起来接在十
智能交通信号控制系统
HiCon智能交通信号控制系统 青岛海信网络科技股份有限公司 2008年1月
目录 1海信交通信号控制系统介绍 (1) 1.1系统概述 (1) 1.2系统特点 (2) 1.3H I C ON交通信号控制系统软件功能 (2) 1.4HSC-100交通信号机 (4) 1.4.1概述 (4) 1.4.2 3.4.2信号机的生产和检测 (5) 1.4.3信号机功能 (7) 1.4.4信号机性能指标 (7)
1海信交通信号控制系统介绍 1.1系统概述 “HiCon交通信号控制系统”是我公司开发的交通控制领域高端产品,该产品与国内著名高校强强联合,应用国际领先技术,结合国内复杂交通特征及国外城市交通特点研发,为同内外城市提供完备的交通管理与控制方案、自适应控制系统软件及系统兼容的信号机,我公司对该产品具备自主知识产权。 “HiCon交通信号控制系统”是包括HiCon交通信号控制系统中心软件、HSC系列交通信号机和CMT交通信号机配置与维护工具软件。 图1 海信交通信号控制系统结构图 系统的结构图如上图所示,分为管理控制平台、中心控制级、通信级和路口控制级。路口级交通信号机通过串行通信或以太网连接到控制中心,通信协议采用的是NTCIP。 路口信号机实时从路口采集交通流量、时间占有率、速度等信息,并实时上
传到中心机级,存入实时和历史数据库,为路口的统计分析提供数据,提供辅助决策支持和交通信号设备维护与管理。 控制中心根据实时的检测信息对当前的交通状态进行合理决策,对所控制的路口信号配时参数进行实时优化,并将优化结果下达给信号机执行,目的在于减少车辆及行人等待时间,缓解城市交通拥堵,降低环境污染,实现对城市交通的最佳控制。 1.2系统特点 (1)系统的应用范围广,可以用于城市的一般交叉口控制、也可以用于快速路、高速路的匝道、车道灯的控制,同时还能用于公交优先的控制。 (2)系统采用的是NTCIP通信协议,NTCIP作为美国乃至整个北美地区的智能交通系统的标准通信协议,体系完整,通用性与兼容性好。 (3)系统具有高效可靠开放的通信子系统,保证了内部实时通讯的可靠性、效率、可扩展性,同时实现了系统的开放性. (4)系统的接口透明,提供二次开发能力,便于多系统的集成。 (5)系统具备良好的故障诊断功能,实时显示路口设备故障状况,并能通过网络实现信号机的远程维护功能。 (6)系统采用方案选择与方案生成相结合的实时优化算法。 (7)系统采用的是先进的交通数据预测及故障降级技术,使得系统对检测器的依赖性大大降低。 (8)交通信号机的CPU采用的32位的芯片,控制功能强大。 1.3HiCon交通信号控制系统软件功能 HiCon交通信号控制系统软件能够从信号机获得实时交通信息及设备状态信息,并采用先进的预测技术对交通流量、时间占有率进行预测,利用优化模型对交通信号配时参数进行实时优化,实现各种协调控制。 系统软件还能够提供用户进行各种远程控制功能,包括警卫路线控制、动态绿波控制、干预线控等。系统软件能够为用户提供GIS平台上的各种方便快捷的操作,如在地图上漫游、缩小、放大等,用户可查看路口的信号配时、设备状
at89c51单片机_交通灯控制系统(含源码及仿真图).
模拟交通灯设计报告 题目交通信号灯控制系统 团队研发区第二组 完成时间2011-11-31 贵州民族学院开放实验室
` 目录 一、项目名称 (1) 二、选题背景 (1) 2.1 课题背景 (1) 2.2 交通灯的历史 (1) 三、单片机简介 (2) 3.1 单片机的发展历程 (2) 3.2 单片机的特点: (3) 3.3 AT89C52单片机简介 (4) 四、设计基本要求和步骤 (5) 4.1 基本要求 (5) 4.2 设计步骤 (6) 五、硬件和软件设计 (6) 5.1 硬件电路图 (6) 5.2 程序流程图 (8) 主程序 (8) 运行过程 (9) LED显示程序 (10) T0中断 (11) INT0中断 (11) 5.3 P0、P1口显示状态编码表 (12) 5.4 程序源代码 (12) 5.5 程序运行效果图 (21) 六、心得体会 (22) 七、参考文献.............................................................................. 错误!未定义书签。
模拟交通灯设计报告 一、项目名称 十字路口交通信号灯控制系统 二、选题背景 2.1 课题背景 由于我国经济的快速发展从而导致了汽车数量的猛增,大中型城市的城市交通,正面临着严峻的考验,从而导致交通问题日益严重,其主要表现如下:交通事故频发,对人类生命安全造成极大威胁;交通拥堵严重,导致出行时间增加,能源消耗加大;空气污染和噪声污染程度日益加深等。日常的交通堵塞成为人们司空见惯而又不得不忍受的问题,在这种背景下,结合我国城市道路交通的实际情况,开发出真正适合我们自身特点的智能信号灯控制系统已经成为当前的主要任务。随着电子技术的发展,利用单片机技术对交通灯进行智能化管理,已成为目前广泛采用的方法。 2.2 交通灯的历史 1868年12月10日,信号灯家族的第一个成员就在伦敦议会大厦的广场上诞生了,由当时英国机械师德·哈特设计、制造的灯柱高7米,身上挂着一盏红、绿两色的提灯--煤气交通信号灯,这是城市街
交叉口交通信号智能控制的仿真研究
交叉口交通信号智能控制的仿真研究 【摘要】本文针对城市交通控制中存在的问题和特征,围绕如何实现合理有效的交叉路口交通信号智能控制问题,对交通信号的优化与控制进行了仿真研究和探讨。以matlab作为仿真软件,通过采集实时交通流数据,建立合理数学模型,进行多次仿真实验,模拟出合理的信号周期时长及绿信比,为解决实际的城市交通问题提供有益的方法和途径。 【关键词】交叉口;交通控制;matlab 0 引言 城市数量随着社会的发展不断增多。大多数城市的基本框架、城市布局与市区道路在历史上早己形成,在我国城市的网格状、环型放射状、自由网络状和混合状几种城市交通网中,普遍存在着中心地区道路狭窄、人口集中、房屋林立的状况,加之市中心大多数又是商业繁华地区、干道汇集之处,存在交通拥挤亦是在所难免。交通拥挤现象日益突出。调查结果显示,目前我国多数城市的行车速度只能维持在10-20km/h左右,有的甚至更低。随着城市化进程的大大加快,交通需求随之急剧增长,供需矛盾不断激化,严重的交通问题也随之而来,而交通拥堵问题是城市道路交通最为迫切的问题。 交通拥堵中一个最重要的表现就是交叉口问题,对交叉口的有效管理是解决交通拥挤问题的关键。最有效的方法之一就是交通信号控制;交叉口必要的、合理的信号控制对于提高路口通行能力、保障交通安全具有重要意义。 1 交通信号控制参数 交通控制[1]是指通过对城市交叉路口信号灯持续时间进行合理控制,使得交通流能够高效驶离交通路口,达到疏导、改善交通流的目的。其主要参数[2]有周期、相位、绿信比、饱和度等。 1.1 周期 用于指挥交通的信号一个循环内所经历的时间称为信号周期长度,简称周期。用C表示。信号周期长度的大小取决于被控交叉口的交通流特性和所采用的控制方式。一般是交通量越大,周期就应该越长;它是一次绿灯(G)、黄灯(A)和红灯(R)显示时间之和,C=G+A+R。 周期的长短是根据车流的稀疏程度来确定的;最小周期、最大周期根据具体的情况取值,整个控制过程中的最佳周期就是使车辆在路口总延误时间最短的周期,也就是每一个相位的绿灯时间刚好能够使该相位各入口处等待车队放行完毕。
交通灯信号控制器仿真设计
交通灯信号控制器仿真设计 一、设计目的 1、巩固和加强《数字电子技术》课程的理论知识。 2、掌握电子电路的一般设计方法,了解电子产品研制开发过程。 3、掌握电子电路安装和调试的方法及其故障排除方法,学会用Multisim软 件仿真。 4、通过查阅手册和文献资料,培养学生独立分析问题、解决问题以及团队协作能力。巩固所学知识,加强综合能力,提高实验技能,启发创新能力的效果 5、培养学生创新能力和创新思维。让学生通过动手动脑解决实际问题,巩固课程中所学的理论知识和实验技能。 二、设计要求 1、设计一个十字路口的交通灯控制电路,要求东西方向和南北方向车道两条交叉道路上的车辆交替运行,每次通行时间都设为45s。时间可设置修改。 2、在绿灯转为红灯时,要求黄灯先亮5s,才能变换运行车道。 3、黄灯亮时,要求每秒闪亮一次。 4、东西方向、南北方向车道除了有红、黄、绿灯指示外,每一种灯亮的时间都用显示器进行显示。 5、假定+5V电源给定。 三、总体概要设计 设计一个十字路口的交通灯控制电路,要求东西方向和南北方向车道两条交叉道路上的车辆交替运行,每次通行时间都为45s,每次绿灯变红时黄灯先亮5秒。该交通灯控制系统的总体设计方案如下图所示所示。90进制加法计数器作为该系统的主控制电路,控制东西方向和南北方向交通的及LED显示,秒信号发生器产生整个定时系统的时间脉冲,通过加法计数器对秒脉冲加计数,当到达固定时刻,控制LED显示的减法计数器进行数制转换,交通灯做出相应的变化。 交通灯控制系统的总体设计方案 电
电路流程图 四、局部细节设计 一、秒脉冲电路部分
二、主控电路(89进制加法计数器)部分 三、东西方向减法计数器及LED显示部分
智能交通信号控制系统
智能交通信号控制系统 一、信号控制的基本概念 (一) 信号相位。信号机在一个周期有若干个控制状态,每一种控制状态对某些方向的车辆或行人配给通行权,对各进口道不同方向所显示的不同灯色的组合,称为一个信号相位。我国目前普遍采用的是两相位控制和多相位控制。 (二)信号周期。是指信号灯各种灯色显示一个循环所用的时间,单位微秒。信号周期又可分为最佳周期时间和最小周期时间。 (三)绿信比。是指在一个周期内,有效绿灯时间与周期之比。周期相同,各相位的绿信比可以不同。 (四)相位差。是指系统控制中联动信号的一个参数。它分为相对相位差和绝对相位差。相对相位差是指在各交叉口的周期时间均相同的联动信号系统中,相邻两交叉口同相位的绿灯起始时间之差,用秒表示。此相位差与周期时间之比,称为相对相位差比,用百分比表示。在联动信号系统中选定一个标准路口,规定该路口的相位差为零,其他路口相对于标准路口的相位差,称为绝对相位差。 (五)绿灯间隔时间。从失去通行权的上一个相位绿灯结束到得到通行权的下一个相位另一方向绿灯开始的时间,称为绿灯间隔时间。在我国,绿灯间隔时间为黄灯加红灯或全红灯时间。当自行车和行人流量较大时,由于自行车和行人速度较慢,为保证安全,需进行有效调整,可以适当增加绿灯间隔时间。 此外,信号控制的基本参数还有饱和流率、有效绿灯时间、信号损失时间、黄灯时间、交叉口的通行能力与饱和度等。 信号灯的分类: (一)交通信号灯,按用途可分为车辆交通信号灯、行人交通信号灯、方向交通信号灯和车道交通信号灯等。 (二)交通信号灯,按操作方式可分为定周期控制信号灯和感应式控制信号灯。感应式控制信号灯又分为半感应控制和全感应控制两种。 (三)交通信号灯,按控制范围可分为单个交叉路口的交通控制、干道交通信号联动控制和区域交通信号控制系统,即“点控”、“线控”、“面控”三种。
平面交叉口信号配时仿真实验
平面交叉口信号配时仿真实验 第一部分 VISSIM实验系统与功能操作 一、Vissim软件功能简介 Vissim是一种微观、基于时间间隔和驾驶行为的仿真建模工具,用以建模和分析各种交通条件下(车道设置、交通构成、交通信号、公交站点等),城市交通和公共交通的运行状况,是评价交通工程设计和城市规划方案的有效工具。 ●Vissim是解决各种交通问题的有力工具,主要应用包括: 1.公交优先信号控制逻辑的设计、评价和调整。 2.对于有协调和感应信号控制的路网交通控制的评价和优化(Signal97 接口)。 3.城市道路网中轻轨建设项目的可行性及其影响评价。 4.分析慢速交通交织区。 5.对比分析交通设计方案,包括信号控制交叉口和停车标志控制交叉口、环交、和立交的设计。 6.轻轨和公共汽车系统的综合站点布局的容量评价和管理评价。 7.通过Vissim评价公共汽车优先解决方案,如插队、港湾停靠站和公交专用车道。 8.使用嵌入式动态交通分配模型,解决行驶路径选择的相关问题,如不确定信号的影响、对于中等城市而言,交通流分向路网邻近区域的可能性。 ●Vissim软件是交通仿真软件,具体的模拟仿真功能为: 1.模拟交通渠化方案、公交枢纽组织、停车场设置、收费站车流量等各种交通现象。 2.提供一个虚拟平台,在计算机上模拟不同方案的运行结果,提供定量分析指标。 3.提供2D和3D的方案运行动画文件。 4.测试所设计的信号灯情况,给出相关的评价指标,可在线显示信号灯的变化情况。 5.感应模块可以通过检测量的设置,根据流量的不同,来设置感应式的信号灯或交通控制,实现逻辑控制信号等或交通流。 6.Vissim本身带有一套3D模型的数据库,含有各种车辆模型和部分树木房屋等文件。 二、Vissim操作界面简介 打开Vissim软件,界面主要包括标题栏、菜单栏、工具栏和编辑区。
信号控制交叉口行人过街交通组织与控制
李克平,等:信号控制交叉口行人过街交通组织与控制摘要:行人既是信号控制交叉口交通事故中的弱者,也是交叉口秩序混乱和效率低下的根源之一。首先归纳了行人过街的典型心理和行为特征,分析了影响行人过街行为的诸多因素,包括行人自身特点、环境因素、交通因素、交叉口几何设计因素、信号控制因素、交通执法等。在此基础上提出了交叉口行人过街交通组织和控制的基本原则和基本方法。最后,选择典型交叉口进行行人交通设计案例分析。值得强调的是,为处理好行人交通问题,仅依靠交通工程措施是远远不够的,更需要完善交通法规,加强交通教育和宣传,增强交通执法力度。 Abstract :Pedestrians are not only vulnerable to traffic acci-dents but also the cause of disorderly traffic flow at intersec-tion.By summarizing the characteristics of pedestrian behav-ior,this paper analyzes the influencing factors on pedestrian crossing,such as their physical state,environment factor ,traf-fic factors,intersection layout design,signal control,traffic en-forcement,and etc.Based on the proposed basic principles and methods for pedestrian traffic control at intersections,the pa-per introduces several examples of intersection layout design and signal control.Finally,the paper points out that engineer-ing solution alone are not sufficient.To improve pedestrian safety at intersections,it is necessary to have better traffic laws,enhanced safety education,and powerful enforcement methods. 关键词:交通管理;信号控制交叉口;行人;交通组织;信号控制Keywords :traffic management;signalized intersections;pedes-trian;traffic organization;signal control 中图分类号:U491.5+4文献标识码:A 交叉口处混合交通流相互干扰严重,冲突点多,事故发生率高。我国有40%左右的交通事故发生在交叉口,其中与行人相关的占10%以上[1]。从通行能力角度而言,因行人和非机动车干扰而导致的通行能力损失约为总通行能力的15%左右[2]。由此可见,行人既是交通事故中的弱者,又是交叉口秩序混乱和效率低下的根源之一。 1行人过街违章的原因 我国城市道路中行人随意横穿马路、不在指定处过街、违反交通控制信号等现象屡见不鲜。行人在交叉口违章,干扰机动车正常通行,导致交叉口运行状况陷入“秩序混乱-安全性差和效率低下-延长信号周期-行人违章增加-秩序更加混乱”的恶性循环。一些城市尝试采用强制管理的办法,甚至将违章且不接受管制的行人施以行政拘留,但收效甚微且不可持续。一旦放松管制,立刻回归原状。究其原因,主要有以下几点: 1)现有规范尚缺乏对行人交通的足够重视;关于行人过街的交通法规,还存在一些盲区和误区,比如最基本的关于行人过街灯色的定义。 )我国尚未建立完善的交通安全教育和宣传体制,交通安全教育环节的缺失导 收稿日期:2010-10-20 作者简介:李克平(1960—),男,上海人,博士,教授,博士生导师,同济大学中德交通研究中心主任,主要研究方向:交通信号控制、交叉口规划设计、微观交通仿真分析。_@63城市交通第9卷第1期2011年1月 ■文章编号:1672-5328(2011)01-0065-07 Urban Transport of China,V ol.9,No.1,January 2011 李克平,倪颖 (同济大学交通运输工程学院交通工程系,上海201804) LI Ke-ping,NI Ying (Department of Traf fic Engineer,School of Transportation Engineering,Tongji University,Shanghai 201804) Pedestrian Traffic Control at Signalized Intersections 信号控制交叉口行人过街交通组织与控制 2E -mail:keping li https://www.360docs.net/doc/ea2823521.html,
交通灯的仿真与设计
交通灯的仿真与设计 1.引言 在城镇街道的十字交叉路口,为了保证交通秩序和行人安全,一般在每条道路上各有一组红、黄、绿交通信号灯,其中红灯亮,表示该条道路禁止通行;黄灯亮表示该条道路上未过停车线的车辆停止通行,已过停车线的车辆继续通行;绿灯亮表示该条道路允许通行。交通灯控制电路自动控制十字路口两组红、黄、绿交通灯的状态转换,指挥各种车辆和行人安全通行,实现十字路口交通管理的自动化。交通信号灯的出现,使交通得以有效管制,对于疏导交通流量、提高道路通行能力、减少交通事故有明显效果。因此,如何采用合适的方法,使交通信号灯的控制与交通疏导有机结合,最大限度缓解主干道与匝道、城区同周边地区的交通拥堵状况,越来越成为交通运输管理和城市规划部门亟待解决的主要问题。以下就一简单的交通灯控制系统的原理、设计和仿真等问题进行讨论。2.设计任务与要求 2.1 设计任务 1、设计一个十字路口的交通灯控制电路,要求甲车道和乙车道两条交叉道路上的车辆交替运行,每次通行时间都设为25秒; 2、要求黄灯先亮5秒,才能变换运行车道; 3、黄灯亮时,要求每秒钟闪亮一次 4、每路口均有时间显示(两位LED) 2.2 设计要求: 1、画出总体设计框图,以说明交通灯由哪些相对独立的功能模块组成,标出各个模块之间互相联系,时钟信号传输路径、方向和频率变化。并以文字对原理作辅助说明。 2、设计各个功能模块的电路图、真值表(或状态转换图)并加上原理说明。 3、有条件时选择合适的元器件,在面包上接线验证、调试各个功能模块的电路,在接线验证时设计、选择合适的输入信号和输出方式,在充分电路正确性同时,输入信号和输出方式要便于电路的测试和故障排除。 4、设计整个电路的电路图,加上原理说明。有条件时对整个电路的元器件和布线进行合理布局,并进行整个交通灯电路的接线调试。 3.交通灯控制电路的设计方案 3.1 总体方案设计
proteus十字路口交通信号灯控制系统仿真课程设计
目录 一、项目名称 (1) 二、选题背景 (1) 2.1 课题背景 (1) 2.2 交通灯的历史 (1) 三、单片机简介 (2) 四、设计基本要求和步骤 (3) 4.1 基本要求 (3) 4.2 设计步骤 (4) 五、硬件和软件设计 (5) 5.1 硬件电路图 (5) 5.2 程序流程图 (6) 5.3 程序运行效果图 (10) 六、心得体会 (12) 七、参考文献 (13)
一、项目名称 十字路口交通信号灯控制系统 二、选题背景 2.1 课题背景 由于我国经济的快速发展从而导致了汽车数量的猛增,大中型城市的城市交通,正面临着严峻的考验,从而导致交通问题日益严重,其主要表现如下:交通事故频发,对人类生命安全造成极大威胁;交通拥堵严重,导致出行时间增加,能源消耗加大;空气污染和噪声污染程度日益加深等。日常的交通堵塞成为人们司空见惯而又不得不忍受的问题,在这种背景下,结合我国城市道路交通的实际情况,开发出真正适合我们自身特点的智能信号灯控制系统已经成为当前的主要任务。随着电子技术的发展,利用单片机技术对交通灯进行智能化管理,已成为目前广泛采用的方法。 2.2 交通灯的历史 1868年12月10日,信号灯家族的第一个成员就在伦敦议会大厦的广场上诞生了,由当时英国机械师德·哈特设计、制造的灯柱高7米,身上挂着一盏红、绿两色的提灯--煤气交通信号灯,这是城市街道的第一盏信号灯。1914年,在美国的克利夫兰市才率先恢复了红绿灯,不过,这时已是“电气信号灯”。稍后又在纽约和芝加哥等城市,相继重新出现了交通信号灯。
随着各种交通工具的发展和交通指挥的需要,第一盏名副其实的三色灯(红、黄、绿三种标志)于1918年诞生。它是三色圆形四面投影器,被安装在纽约市五号街的一座高塔上,由于它的诞生,使城市交通大为改善。 中国最早的马路红绿灯,是于1928年出现在上海的英租界。三、单片机简介 单片机微型计算机是微型计算机的一个重要分支,也是颇具生命力的机种。单片机微型计算机简称单片机,特别适用于控制领域,故又称为微控制器。 在MCS-51系列单片机中,有两个子系列:51子系列和52子系列。每个子系列有诺干中型号。51系列有8051、8751和8031三个型号,后来经过改进产生了80c51、87c51、80c31三个型号;52系列有5021、8752、8032三个型号,改进后的型号是 80c52/87c52、80c32。改进后的型号更加省电。52系列比对应的51系列增加了定时器T2并将内部程序存贮器增加到8KB。Inter 公司停止生产MCS-51系列单片机之后将生产权转让给了许多其他公司,于是出现了许多与Mcs-51兼容的单片机。现在生产mcs-51兼容单片机的公司对其进行了不同程度的改进和提高。我们现在使用比较的多的是AT89C51/AT89s51等。 通常,单片机由单块集成电路芯片构成,内部包含有计算机的基本功能部件:中央处理器、存储器和I/O接口电路等。因此,单
信控交叉口半感应控制方案优化研究
信控交叉口半感应控制方案优化研究 摘要感应信号控制不仅可以有效提高道路通行能力,缓解目前普遍存在的交通拥堵问题,还能减少交通事故发生率。针对目前感应控制存在的不足,考虑车辆安全行驶、行人过街时间和周期时长约束条件,建立了最小绿灯时间优化模型。用VISSIM 感应控制模块对模型进行了仿真验证,和传统半感应控制仿真对比,以信号交叉口信号控制延误与相应交叉口服务水平为评价指标,验证模型的有效性。 关键词交通控制;半感应信号交叉口;多相位;控制算法 前言 固定信号控制导致的绿灯时间的损失并不利于提高交叉口的通行效率,人们开始研究并使用信号交叉口感应控制技术来通过管理交叉口信号灯来实时控制交叉口过往的车辆,感应控制在交通量变化大而不规则、难以用定时控制处置的交叉口,以及必须降低对主要感到干扰的交叉口上優势明显,可以极大地降低了交叉口的延误时间,是较好的信号交叉口管理方式。 信号交叉口的感应控制设备、安装维护费用比普通的定时信号控制设备要高,从经济性和实用性的角度考虑,半感应控制的研究是一种比较现实可行的方法,本文研究的是主次道路相交的,在次路上车辆和行人时常中断的交叉口,即信号交叉口的半感应控制,旨在保证次干路车流人流通行的基础上,提高主路车流人流的通行效率,降低主次路交叉口的通行延误,缓解交通拥堵。 1 相关理论 在半感应控制中,交叉口由感应和定时控制控制。半感应控制主要用于主路与支路交叉口的交叉口。根据探测器位置,可分为主路半感应控制和分支半感应控制。在半传感控制的交叉口,探测器的相位不按时间控制进行操作。论文研究的是检测器设置在次路上的半感应控制[1]。 2 感应控制配时参数优化模型 2.1 检测器的埋设 探测器是车辆到达检测的手段,是交通控制系统的信息源,为实现系统的最优控制提供了基础数据。根据探测器的工作原理,探测器类型的成本性能,主要有环形线圈检测器、超声波探测仪、视频图像检测器、磁检测器、微波雷达检测器、光学车辆检测器等,其中环形线圈检测器是最常用的车辆检测器。 为了保证主干道的交通流,探测器被埋在二级公路上。它可以简化信号时序的计算过程,降低检测器的维护量,降低传感器信号的控制成本。通过现场观察,
交通灯控制系统设计与仿真
交通灯控制系统设计与仿真 项目名称交通灯控制系统设计与仿真 指导老师曾欣荣、宋小青 组员于洋20121642 黄腾飞20121653 陈晗嫣20122741 蒋煜襄20122746 石洁20125620 黄玉佳20125623
摘要 随着社会主义的建设,城市的规模在不断扩大,城市的交通也在不断的提高和改进,交通的顺畅已经成为制约社会主义建设的一个重要因素。目前,伴随着机动车辆的不断增 以来,有许许多多的设计工作者投身于十字路口交通建设的研究之中,创造和设计出了很多新型的方案,把我国交通建设推向了更高的发展阶段。当前,十字路口都采用了信号灯来控制车辆和人的通行,不仅便于维护管理,而且有较强的自动化。大量的信号灯电路正向着数字化、小功率、多样化、方便人、车、路三者关系的协调,多值化方向发展随着社会经济的发展,城市交通问题越来越引起人们的关注。它的出现使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。交通信号灯控制方式很多。本系统采用单片机AT89S52来设计交通灯控制器,实现了能根据实际车流量通过AT89S52芯片的P1口设置红、绿灯燃亮时间的功能;红绿灯循环点亮,倒计时剩5秒时黄灯闪烁警示。本系统实用性强、操作简单、扩展功能强。 关键词:AT89S52单片机;交通灯;倒计时;时间显示
第一章绪论 1.1交通信号灯的发展及研究意义 当今,红绿灯安装在各个道口上,已经成为疏导交通车辆最常见和最有效的手段,这一技术已经有相当长的发展历史了。 红绿灯的起源可追溯到19世纪初的英国。那时,在英国的约克城,着红装的女人表示“已婚”,而着绿装的女人则是“未婚”。当时,伦敦议会大厦前经常发生马车轧人的事故。受红绿装启发,英国机械师德?哈特于1868年设计了红、绿两色的煤气交通信号灯,由一名手持长杆的警察通过牵动皮带来转换灯的颜色。可惜的是,这盏灯的历史只有23天,中断的原因是煤气灯突然爆炸使一位警察殉职。图为一张1938年6月27日发布的照片显示,在英国伦敦,行人看着一群蜜蜂聚集在一个交通信号灯上。 电气启动的红绿灯出现在美国,这种红绿灯由红绿黄三色圆形的投光器组成,1914年始安装于纽约市5号大街的一座高塔上。红灯亮表示“停止”,绿灯亮表示“通行”。克里夫兰市率先在街道中恢复交通信号灯,随后纽约、芝加哥等城市也开始出现。这时的交通信号灯已从煤气进化为电气,这与现代的交通信号灯已经没有多少差距,除了信号灯本身,美国人还完善了信号控制系统。图为1931年6月23日,美国纽约第五大道竖起一盏新的青铜制造的红绿灯。
交通灯信号控制器的设计
交通灯信号控制器的设计 一,设计任务与要求 交通灯控制信号用于主干道公路的交叉口,要求是优先保证主干道的畅通,因此,平时处于“主干道绿灯,支干道红灯”的状态。 1.当处于“主干道绿灯,支干道红灯”状态时: (1)、主干道有车要求通行,支干道也有车要求通行时,若主干道通行时 间大于等于30S则切换到“主黄,支红”,4S后自动换到“主红,支绿”。 (2)、主干道无车要求通行,支干道有车要求通行时,立即切换到“主黄, 支红”,4S后自动自动切换到“主红,支绿”。 其他情况保持“主绿,支红”。 2.当处于“主红,支绿”状态时: (1)、支道有车要求通行时,保持“主红,支绿”状态,但最多保持30S 然后自动切换到“主红,支黄”状态,4S后自动切换到“主绿,支红”状态。 (2)、支道无车要求通过时,立即切换到“主红,支黄”状态,4S后自动 切换到“主绿,支红”状态。 3.利用八位七段管码显示模块其中的2位实现时间显示。 二,总体框图 初步设计图
三,选择器件 1,(1)3-8译码器74138芯片. (2)3-8译码器74138的逻辑功能表:
(3)3-8译码器74138的内部原理图: (4)3-8译码器74138的作用: 74138有三个附加的控制端。当G1为高电平,G2AN和G2BN为低电平时,输出为高电平(S=1),译码器处于工作状态。否则,译码器被禁止,所有的输出端被封锁在高电平。这三个控制端也叫做“片选”输入端,利用片选的作用可以将多篇连接起来以扩展译码器的功能。 本设计所用实验箱的8个数码管采用扫描显示方式,数码管位选电路在扫描信号的控制下轮流输出8路数据,此8路数据时分复用一个BCD7段显示译码器。数码管位选电路同时输出位选信号,经74LS138译码器译码后分别选中8个数码管。在位选选中一个数码管的的情况下送出段码,在该段码管中显示段码字符,然后接着选中其它数码管,送其他字符。
单交叉口交通信号控制方法现状及其展望
科技信息 0.引言 随着我国城市化进程的不断加快,机动车保有量迅猛增长,进而使道路交通需求急剧增加。尽管近年来城市交通基础设施建设投资不断加大,但交通拥堵问题依然尖锐,不仅造成巨额的经济损失和环境质量恶化,发展严重甚至会导致城市功能的瘫痪。然而经济的不断发展势必促使机动车拥有量在一个长时间内仍会持续高速增加,仅仅依靠加强交通基础设施的建设,根本无法解决问题[1]。因此人们自然而然地把解决交通拥堵的目光投向时间这个要素,即利用信号配时的方法解决交通拥堵问题,而单交叉口作为城市交通网络中的重要组成部分,是城市交通拥挤的主要发生地,所以对单交叉口信号控制方法进行研究,对于改善城市道路交通拥堵状况、提高道路通行能力、减少交通事故具有十分重要的现实意义。 1.单交叉口控制的定义 单交叉口信号控制,是指对单一交叉口或干线、区域内的某交叉口单独进行信号控制的方式,主要参数是信号周期长度和绿信比。这种控制的特点是各单交叉口的信号配时彼此之间没有关联,各自独立调整和运行,从而使本单交叉口车辆的延误和停车次数等指标达到最小,同时又给车辆提供一个比较大的通行能力。 2.已有单交叉口交通信号控制方法简要分析 目前单交叉口交通信号控制方法很多,就发展历程和控制原理上划分,单交叉口交通信号控制可分为传统控制方法和智能控制方法,本文就两者的具体理论和方法做简要阐述。 2.1基于传统控制的单交叉口交通信号控制方法 2.1.1定时控制方法 定时控制是研究如何根据交叉口的道路条件及各路口到达车辆的流向和流量来确定信号的配时方案(如交叉口的相位顺序、数量、相位周期和绿信比等参数)。其评价指标一般有以下几个:通行能力、饱和度、行程时间、延误、停车次数,停车率及油耗等。信号配时原则是:在一定的道路条件下,应配以适当的周期时长,让通行能力稍高于交通需求而使延误、停车、油耗等指标最小。这样既可以保证车辆的畅通又能降低运行费用。普遍采用的是Webster方法,该方法以交通延误作为交通效益指标,以交通延误最小求解最佳周期时长,各相位绿信比由各相位的最大流量比按比例分配。 2.1.2感应控制方法 感应控制是通过车辆检测器测定到达进口道的交通需求,使信号显示时间适应测得的交通需求的一种控制方式。感应控制对车辆到达随机性大的交通情况适应性较好,可使车辆在停车线前尽可能少停车,以保证交通通畅。其基本思路是在一个预置的时间间隔内,若无后续车辆到达,则即可更换相位;如检测到有后续车辆到达,则每测得一辆车,绿灯延长一个预置的“单位绿灯延长时间”,只要在这个预置的时间间隔内,车辆中断就换相;连续有车,则绿灯连续延长,一直延长到一个预置的“极限延长时间”时,即使检测到后面仍有来车,也中断这个相位的通车权,转换到另一个相位。 2.2基于智能控制的单交叉口交通信号控制方法 虽然感应控制比定时控制更能适应交通流量的随机变化,但是感应控制的算法中只是考虑对当前通行相位时间的延长,而没有考虑其他相位的车辆排队情况。解决该问题的方法有两种:一是建立数学模型对交叉口各个方向的车辆到达作准确的预测,根据最优化理论确定各个方向的绿灯时间;二是采用智能控制的方法对交叉口进行控制。由于交通系统具有随机性、非线性、模糊性等特点,很难建立数学模型,同时针对交通系统模型所提出的算法十分复杂,控制效果不尽人意,实时性也较差[2]。近年来,随着计算机技术的迅速发展和智能控制理论的不断完善,将智能控制方法应用于交通系统控制得到了国内外学者广泛关注,下面就目前比较成型的智能控制方法做简要总结。 2.2.1模糊控制算法 Zadeh提出的模糊集理论对解决复杂过程中不确定性问题提供了一个很好的途径,它不需要知道被控对象的数学模型,对被控对象特性参数的变化具有较强的抑制能力。因交通控制具有较大的随机性和复杂性,同时长期的实践又积累了大量的人工控制经验,因而十分适合模糊控制方法的应用。自Pappis于1977年首先将模糊逻辑概念应用到城市交叉路口控制领域以来,城市交叉路口的交通控制就一直是模糊控制研究与应用的对象。 基于模糊逻辑的单交叉口控制的模糊规则和隶属度函数一般采用试探的方式确定。其研究思路基本上可以概括为如下的表达式[3]:E=f(S,C,P) 其中,f为模糊系统的映射关系,E为系统输出矢量,可以是绿信延长时间,相位差,信号周期长等控制信号。S、C均为系统输入矢量,其中S为交通状况判断参数,如排队长,交叉路口总的车流量,平均车速等等,C为系统设计中的其它控制参数,例如在多控制器中与其它控制器的接口参数。P为模糊系统的结构参数,例如模糊规则和模糊隶属度函数等。其控制过程可以描述为:根据检测到的各路段的车辆信息,将当前相位和下一相位的主队列车辆数作为模糊控制器的输入,经过模糊化、模糊推理和清晰化之后,以当前相位的绿灯延时作为模糊控制器的输出,从而实现当前相位交通信号灯的实时控制。 2.2.2神经网络控制 神经网络控制是研究和利用人脑的某些结构机理以及人的知识和经验对系统的控制方式。鉴于神经网络系统的智能性、鲁棒性较好,对非线性系统和难以建模的系统具有良好的映射功能和学习功能,能处理多维、非线性、强耦合和不确定的复杂系统的控制问题。因而神经网络控制比较适合难以建立准确数学模型的交通系统。 神经网络控制方法与模糊控制在同一时期出现在交通控制的研究领域。自从Hopfield将人工神经网络成功地应用于组合优化问题后,人们开始利用神经网络的自适应性、学习能力和大规模平行计算能力来进行交通控制的尝试,目前比较成功的神经网络控制模型大多是孤立路口的控制模型,其中主要体现在神经网络控制单独应用于系统的建模、学习和控制以及神经网络控制与其他控制方法相结合,例如,为了提高模糊控制精度,人工神经网络用于映射的模糊关系模糊推理或执行,来提高它的学习能力。 2.2.3进化算法控制 (1)遗传算法 遗传算法(Genetic Algorithm,简称GA)是模仿自然界生物进化机制发展起来的随机全局搜索优化方法,其本质是一种高效、并行、全局的、基于生物自然选择与遗传机理的随机搜索方法,遗传算法操作使用适者生存的原则,在潜在的解决方案种群中逐次产生一个近似最优的方案。对于单交叉口信号控制,可以运用遗传算法对控制变量(相位绿灯时间和周期时长)进行优化,能够有效降低车辆平均延误,在优化过程中具有更好的搜索能力,其良好的优化性能有助于优良配时方案的产生,同时也提高了交通分配模型的实用价值。 (2)蚁群算法 蚁群算法是根据蚂蚁有能力在没有任何可见提示下找出从其窝巢至食物源的最短路径,并能随环境的变化而变化,适应性地搜索新的路径,产生新的选择的原理而定义的一种新型的随机全局搜索算法,蚁群算法吸收了蚂蚁的行为特性,通过其内在的搜索机制,在一系列困难的组合优化问题求解中取得成效。研究表明交叉口信号配时优化问题的计算具有一定的随机性和并行性的特点,因此,将蚁群算法用于模型的求解应该是较为切实可行的。文献[5]采用蚁群算法中的精英蚂蚁寻优策略求解信号配时模型,以伪代码的形式设计了求解该问题的程序流程,最后通过实例验证了蚁群算法在求解交通信号配时问题中是有效的。 2.2.4基于Agent技术和强化学习的单路口交通流控制 Agent技术属于分布式人工智能领域,每个Agent都是具有完整功能、独立、高度智能化的个体,它掌握一定的知识,都有自己的目标和解 单交叉口交通信号控制方法现状及其展望 青岛科技大学数理学院刘祥鹏隋树林 [摘要]单交叉口交通信号控制作为城市交通控制的重要组成部分,本文系统分析了现有的各种单交叉口交通信号控制方法,总结了各种方法的优缺点,并对今后单交叉口交通信号智能控制方法研究的热点作了展望。 [关键词]单交叉口交通信号控制定时控制感应控制智能控制 作者简介:刘祥鹏(1987-),男,硕士研究生,研究方向为学习控制、智能交通等;隋树林(1958-),男,教授,研究方向为智能控制、深空探测与自主导航等。 — —124