电机选型
伺服电机选型技术指南
1、机电领域中伺服电机的选择原则
现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
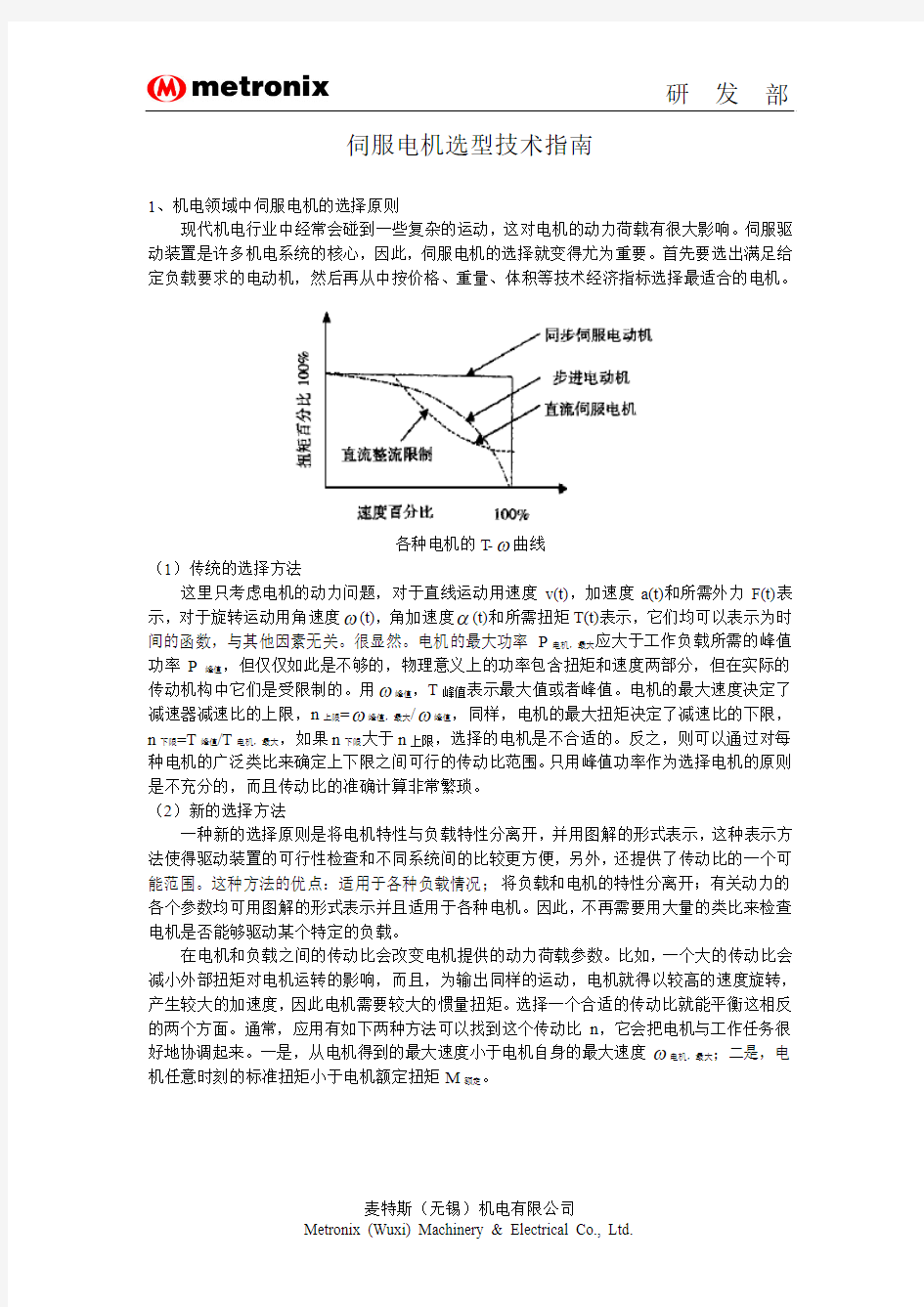
各种电机的T-ω曲线
(1)传统的选择方法
这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。很显然。电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。用ω峰值,T峰值表示最大值或者峰值。电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。
(2)新的选择方法
一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。选择一个合适的传动比就能平衡这相反的两个方面。通常,应用有如下两种方法可以找到这个传动比n,它会把电机与工作任务很好地协调起来。一是,从电机得到的最大速度小于电机自身的最大速度ω电机,最大;二是,电机任意时刻的标准扭矩小于电机额定扭矩M额定。
2、一般伺服电机选择考虑的问题
(1)电机的最高转速
电机选择首先依据机床快速行程速度。快速行程的电机转速应严格控制在电机的额定转速之内。
nom 3h
max n 10P u V n ≤??= 式中,nom n 为电机的额定转速(rpm );n 为快速行程时电机的转速(rpm );m a x V 为直线运行速度(m/min );u 为系统传动比,u=n 电机/n 丝杠;h P 丝杠导程(mm )。
(2)惯量匹配问题及计算负载惯量
为了保证足够的角加速度使系统反应灵敏和满足系统的稳定性要求, 负载惯量J L 应限制在2.5倍电机惯量J M 之内,即M L 5J .2J <。
2N 1j j j 2M
1j j j L )V (m )(J J ∑∑==+=ωωω 式中,j J 为各转动件的转动惯量,kg.m 2;j ω为各转动件角速度,rad/min ;j m 为各移动件的质量,kg ;j V 为各移动件的速度,m/min ;ω为伺服电机的角速度,rad/min 。
(3)空载加速转矩
空载加速转矩发生在执行部件从静止以阶跃指令加速到快速时。一般应限定在变频驱动系统最大输出转矩的80% 以内。
%8060)(2max max ?≤+=A F ac
M L T T t J J n T π 式中,max A T 为与电机匹配的变频驱动系统的最大输出转矩(N.m );m a
x T 为空载时加速转矩(N.m );F T 为快速行程时转换到电机轴上的载荷转矩(N.m );ac t 为快速行程时加减速时间常数(ms )。
(4)切削负载转矩
在正常工作状态下,切削负载转矩ms T 不超过电机额定转矩MS T 的80%。
%802
1?≤=MS c ms T D T T
式中,c T 为最大切削转矩(N.m );D 为最大负载比。
(5)连续过载时间
连续过载时间lon t 应限制在电机规定过载时间Mon t 之内。
3、根据负载转矩选择伺服电机
根据伺服电机的工作曲线,负载转矩应满足:当机床作空载运行时,在整个速度范围内,加在伺服电机轴上的负载转矩应在电机的连续额定转矩范围内,即在工作曲线的连续工作区;最大负载转矩,加载周期及过载时间应在特性曲线的允许范围内。加在电机轴上的负载转矩可以折算出加到电机轴上的负载转矩。
C L T L F T +?=πη
2 式中,L T 为折算到电机轴上的负载转矩(N.m );F 为轴向移动工作台时所需的力(N );L 为电机每转的机械位移量(m );C T 为滚珠丝杠轴承等摩擦转矩折算到电机轴上的负载转矩(N.m );η为驱动系统的效率。
)(cf g c F f W F F +++=μ
式中,c F 为切削反作用力(N );g f 为齿轮作用力(N );W 为工作台工件等滑动部分总重量(N );cf F 为由于切削力使工作台压向导轨的正压力(N );μ为摩擦系数。无切削时,)(g f W F +=μ。
计算转矩时下列几点应特别注意。
(a )由于镶条产生的摩擦转矩必须充分地考虑。通常,仅仅从滑块的重量和摩擦系数来计算的转矩很小的。请特别注意由于镶条加紧以及滑块表面的精度误差所产生的力矩。
(b )由于轴承,螺母的预加载,以及丝杠的预紧力滚珠接触面的摩擦等所产生的转矩均不能忽略。尤其是小型轻重量的设备。这样的转矩回应影响整个转矩。所以要特别注意。
(c )切削力的反作用力会使工作台的摩擦增加,以此承受切削反作用力的点与承受驱动力的点通常是分离的。如图所示,在承受大的切削反作用力的瞬间,滑块表面的负载也增加。当计算切削期间的转矩时,由于这一载荷而引起的摩擦转矩的增加应给予考虑。
(d )摩擦转矩受进给速率的影响很大,必须研究测量因速度工作台支撑物(滑块,滚珠,压力),滑块表面材料及润滑条件的改变而引起的摩擦的变化。已得出正确的数值。
(e )通常,即使在同一台的机械上,随调整条件,周围温度,或润滑条件等因素而变化。当计算负载转矩时,请尽量借助测量同种机械上而积累的参数,来得到正确的数据。
4、根据负载惯量选择伺服电机
为了保证轮廓切削形状精度和低的表面加工粗糙度,要求数控机床具有良好的快速响应特性。随着控制信号的变化,电机应在较短的时间内完成必须的动作。负载惯量与电机的响应和快速移动ACC/DEC 时间息息相关。带大惯量负载时,当速度指令变化时,电机需较长的时间才能到达这一速度,当二轴同步插补进行圆弧高速切削时大惯量的负载产生的误差会比小惯量的大一些。因此,加在电机轴上的负载惯量的大小,将直接影响电机的灵敏度以及整个伺服系统的精度。当负载惯量5倍以上时,会使转子的灵敏度受影响,电机惯量M J 和负载惯量L J 必须满足:
51<≤M
L J J 由电机驱动的所有运动部件,无论旋转运动的部件,还是直线运动的部件,都成为电机的负载惯量。电机轴上的负载总惯量可以通过计算各个被驱动的部件的惯量,并按一定的规律将其相加得到。
(a )圆柱体惯量
如滚珠丝杠,齿轮等围绕其中心轴旋转时的惯量可按下面公式计算:
L D J 432?=
πγ(kg cm 2) 式中,γ为材料的密度(kg/cm 3);D 为圆柱体的直经(cm);L 为圆柱体的长度(cm)。
(b )轴向移动物体的惯量工件,工作台等轴向移动物体的惯量,可由下面公式得出:
2)2(π
L W J =(kg cm 2) 式中,W 为直线移动物体的重量(kg);L 为电机每转在直线方向移动的距离(cm)。 (c )圆柱体围绕中心运动时的惯量如图所示:
圆柱体围绕中心运动时的惯量
属于这种情况的例子:如大直经的齿轮,为了减少惯量,往往在圆盘上挖出分布均匀的孔这时的惯量可以这样计算:
20W R J J +=(kg cm 2)
式中,0J 为圆柱体围绕其中心线旋转时的惯量(kgcm2);W 为圆柱体的重量(kg);R 为旋转半径(cm)。
(d )相对电机轴机械变速的惯量计算将上图所示的负载惯量Jo 折算到电机轴上的计算方法如下:
02
1J N N J =
(kg cm 2) 式中,1N 、2N 为齿轮的齿数。
5、电机加减速时的转矩
(1)按线性加减速时加速转矩
电机加速或减速时的转矩
按线性加减速时加速转矩计算如下:
)1)((1106024Ksta L M a
m a e J J t n T --+?=π (N.m ) 式中,m n 为电机的稳定速度;a t 为加速时间;M J 为电机转子惯量(kg.cm 2);L J 为折算到电机轴上的负载惯量(kg.cm 2);s K 为位置伺服开环增益。
加速转矩开始减小时的转速如下:
)]1(11[Ksta s
a m r e K t n n ---
= (2)按指数曲线加速
电机按指数曲线加速时的加速转矩曲线
此时,速度为零的转矩To 可由下面公式给出:
)(110602e 4O L M m J J t n T +?=
π (N.m ) 式中,e t 为指数曲线加速时间常数。
(3)输入阶段性速度指令
这时的加速转矩Ta 相当于To ,可由下面公式求得(ts=Ks )。
)(110602s
4a L M m J J t n T +?=π (N.m ) 6、根据电机转矩均方根值选择电机
工作机械频繁启动,制动时所需转矩,当工作机械作频繁启动,制动时,必须检查电机是否过热,为此需计算在一个周期内电机转矩的均方根值,并且应使此均方根值小于电机的连续转矩。电机的均方根值由下式给出:
周T t T t T T t T t T T T o f a f f a rms 32122212)()(+-+++=
式中,a T 为加速转矩(Nm );f T 为摩擦转矩(Nm );o T 在停止期间的转矩(Nm );1t ,2t ,3t ,周T 如下图所示。
1t ,2t ,3t ,周T 的转矩曲线
负载周期性变化的转矩计算,也需要计算出一个周期中的转矩均方根值,且该值小于额定转矩。这样电机才不会过热,正常工作。
负载周期性变化的转矩计算图
设计时进给伺服电机的选择原则是:首先根据转矩-速度特性曲线检查负载转矩,加减速转矩是否满足要求,然后对负载惯量进行校合,对要求频繁起动、制动的电机还应对其转矩均方根进行校合,这样选择出来的电机才能既满足要求,又可避免由于电机选择偏大而引起的问题。
8、伺服电机选择的步骤、方法以及公式
(1)决定运行方式
根据机械系统的控制内容,决定电机运行方式,启动时间ta、减速时间td由实际情况合机械刚度决定。
典型运行方式
(2)计算负载换算到电机轴上的转动惯量GD2
为了计算启动转矩P T ,要先求出负载的转动惯量:
).(108GD 2442m kg LD l ?=ρπ
式中,L 为圆柱体的长cm ;D 为圆柱体的直径cm 。
).(8
8)1(GD )(GD 24114222222
m kg d l d l R N N l m l L ρπρπ+?+= 式中,2l 为负载侧齿轮厚度;2d 为负载侧齿轮直径;1l 为电机侧齿轮厚度;1d 为电机侧齿轮直径;ρ为材料密度;2GD l 为负载转动惯量(kg.m 2);l N 为负载轴转速rpm ;m N 为电机轴转速rpm ;R /1为减速比。
(3)初选电机
计算电机稳定运行时的功率Po 以及转矩T L 。T L 为折算到电机轴上的负载转矩:
l m l L T N N T η
= 式中,η为机械系统的效率;l T 负载轴转矩。
η
?=4.9535l l o N T P (4)核算加减速时间或加减速功率
对初选电机根据机械系统的要求,核算加减速时间,必须小于机械系统要求值。
加速时间:
)
(3.38)(22l p m l m a T T N GD GD t -+= 减速时间:
)
(3.38)(22l p m l m d T T N GD GD t ++= 上两式中使用电机的机械数值求出,故求出加入起动信号后的时间,必须加算作为控制电路滞后的时间5~10ms 。负载加速转矩P T 可由起动时间求出,若P T 大于初选电机的额定转矩,但小于电机的瞬时最大转矩(5~10倍额定转矩),也可以认为电机初选合适。
(5)考虑工作循环与占空因素的实效转矩计算
在机器人等激烈工作场合,不能忽略加减速超过额定电流这一影响,则需要以占空因素求实效转矩。该值在初选电机额定转矩以下,则选择电机合适。以典型运行方式中图a 为例:
w d P c l rms f t t T t T t T T ?++=2
2a 2P
式中,a t 为起动时间s ;l t 为正常运行时间s ;d t 为减速时间s ;w f 为波形系数。rms T 若不满足额定转矩式,需要提高电机容量,再次核算。
潜水搅拌机结构和选型方法
潜水搅拌机结构和选型方法 作者:南京兰江水处理设备有限公司 【QJB型潜水搅拌机】结构特点: 混合搅拌系列产品选用多极电机,采用直联式结构,能耗低,效率高;叶轮通过精铸或冲压成型,精度高,推力大,外型美观流畅,结构紧凑。 低速推流系列产品采用摆线针轮减速机,配备功率小,转速低,叶轮直径大,服务面积广。叶轮由聚胺脂材料和铝合金铸成,强度高,耐腐蚀性强,除了具有搅拌的功能外还能外还兼有推流和创建水流的作用。 潜水搅拌机的电机绕组为F级绝缘,防护等级为IP68。在污水厂的曝气系统中配合使用,可使系统能耗大大降低,且充氧量明显提高,能有效的防止沉淀。根据工艺要求,直联式潜水搅拌可配用导流罩。 【QJB型潜水搅拌机】选型注意事项: 为保证潜水搅拌机取得最佳运行效果,请使用方提供如下资料; ◎运用目的; ◎池型及尺寸,包括水深; ◎搅拌介质的特性,包括粘度、密度、温度、及固体物含量等。
6.性能原理 电机能在全浸没条件下连续运行、间隙运行和长期停止状态(正常工艺停机)后恢复运行,搅拌器在整个运行过程中保持平稳状态,无故障运行时间不少于10000小时,每日能连续24小时运行或间隙运行。 6.1导轨系统 导轨系统可自由调整搅拌器的提升和下降,并无需排空水池情况下拆卸和安装搅拌器,搅拌器全部的重量受力在一个支架上,并且这个支架可承受搅拌器产生的推力。 6.2电机壳体 搅拌器的电机壳体由优质不锈钢制造,壳体厚度足以承受何载,其表面加工平整光滑。 6.3叶轮 叶轮用不锈钢制造,且经动平衡实验。叶轮与轴之间装有锁定装置,以防转动时松动,叶片设计为三片式,具有自清洁及免振功能。 6.4轴 搅拌器的电机和叶轮采用直联式传动方式,轴由不锈钢制造,轴能承受所有轴向和径向载荷,轴承的设计寿命不少于100000小时,叶轮轴完全与搅拌介质隔离。 6.5轴封 采用两个相互独立高质量机械密封,机械密封面材料均采用耐腐蚀碳化钨,机械密封的使用寿命不低于25000小时。 6.6电机 潜水搅拌机的电机为三相鼠笼异步电机,防护等级为IP68,绝缘等级为F,潜水电机可连续运行,每小时可启动至少10次,潜水电机与搅拌器应是同一厂家制造。 6.7电缆和电缆密封 电机配有控制和动力水下电缆,为了打动最大限度地保护电机,即使在偶然的不正常运行情况下,电缆损坏且电机仍在水下,电缆进口也不允许有湿气进入电机和接线盒,电缆进口宜采用三道密封,内侧采用单芯电缆剥皮并镀锡后嵌入树脂中,中间整个电缆嵌入树脂中,最外部用长橡胶环密封,电缆密封组件应做成一集成。 6.8搅拌器保护 电机绕组上装有温度传感器以监测电机绕组过热,在搅拌器中应设置泄露和湿气保护传感器,应能监测并在搅拌器出现严重损坏前发出报警信号。
步进电机——步进电机选型的计算方法
步进电机——步进电机选型的计算方法 步进电机选型表中有部分参数需要计算来得到。但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。 ◎驱动模式的选择 驱动模式是指如何将传送装置的运动转换为步进电机的旋转。 下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。 ●必要脉冲数的计算 必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。必要脉冲数按下面公式计算: 必要脉冲数= 物体移动的距离 距离电机旋转一周移动的距离× 360 o 步进角 ●驱动脉冲速度的计算 驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。 驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。 (1)自启动运行方式 自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。 自启动运行方式通常在转速较低的时候使用。同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。 自启动运行方式的驱动脉冲速度计算方法如下: 驱动脉冲速度[Hz]= 必要脉冲数[脉冲]
定位时间[秒] (2)加/减速运行方式 加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。 加/减速时间需要根据传送距离、速度和定位时间来计算。在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。加/减速运行方式下的驱动脉冲速度计算方法如下: 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 驱动脉冲速度[Hz]= 定位时间[秒]-加/减速时间[秒] ◎电机力矩的简单计算示例 必要的电机力矩=(负载力矩+加/减速力矩)×安全系数 ●负载力矩的计算(TL) 负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。步进电机驱动过程中始终需要此力矩。负载力矩根据传动装置和物体的重量的不同而不同。许多情况下我们无法得到精确的系统参数,所以下面只给出了简单的计算方法。 负载力矩可以根据下面的图表和公式来计算。 (1)滚轴丝杆驱动
电机功率的正确选择
电机功率的正确选择 电机的功率.应根据生产机械所需要的功率来选择,尽量使电机在额定负载下运行。选择时应注意以下两点: (1>如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载.使其绝缘因发热而损坏.甚至电机被烧毁。 (2)如果电机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高(见表),不但对用户和电网不利。而且还会造成电能浪费。 要正确选择电机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率(即生产机械轴上的功率)Pl(kw).可按下式计算所需电机的功率P(kw): P=P1/n1n2 式中n1为生产机械的效率;n2为电机的效率。即传动效率。按上式求出的功率,不一定与产品功率相同。因此.所选电机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如果选用效率为0.8的电机,试求该电机的功率应为多少kw? 解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。 (2)短时工作定额的电机.与功率相同的连续工作定额的电动机相比.最大转矩大,重量小,价格低。因此,在条件许可时,应尽量选用短时工作定额的电机。 (3)对于断续工作定额的电机,其功率的选择、要根据负载持续率的大小,选用专门用于断续运行方式的电机。负载持续串Fs%的计算公式为FS%=tg/(tg+to)×100%式中tg为工作时间,t。为停止时间min;tg十to为工作周期时间min。 此外.也可用类比法来选择电机的功率。所谓类比法。就是与类似生产机械所用电机的功率进行对比。具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。试车的目的是验证所选电机与生产机械是否匹配。验证的方法是:使电机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电机铭牌上标出的额定电流 进行对比。如果电机的实际工作电流与铭脾上标出的额定电流上下相差不大.则表明所选电机的功率合适。如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大(即“大马拉小车”应调换功率较小的电动机。如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电动机的功率选得过小(即"小马拉大车"),应调换功率较大的电机. 表: 负载情况空载1/4负载1/2负载3/4负载满载 功率因数0.2 0.5 0.77 0.85 0.89 效率0 0.78 0.85 0.88 0.895
电机安装技术规范
电机安装技术规范 1?目的 规范电机选型、采购、验收、安装、维护、修理、报废七项管理职责。2?适用对象 本工艺标准适用于一般工业安装工程固定式交、直和同步电动机及其附属安装。 3准备 设备及材料要求: 电动机应有铭牌,注明制造厂名,出厂日期,电动机的型号、容量、 频率、电压、电流、接线方法、转速、温升、工作方法、绝缘等级等有关 技术数据。 电动机的容量、规格、型号必须符合要求,附件、备件齐全,并有出厂合格证及有关技术文件。 电动机的控制、保护和起动附属设备,应与电动机配套,并有铭牌, 注明制造厂名,出厂日期、规格、型号及出厂合格证等有关技术资料。 各种规格的型钢均应符合设计要求,型钢无明显的锈蚀。并有材质证明。 螺栓:除电机稳装用螺栓外,均应采用镀锌螺栓,并配相应的镀锌螺母平垫圈、弹簧垫。 作业条件: 在室外安装的电机,应有防雨措施。 电动机的基础、地脚螺栓孔、沟道、电缆管位置尺寸应符合设计质量 要求。 电动机安装场地应清理干净、道路畅通。
电动机驱动设备已安装完毕,且初检合格4操作规范 设备拆箱点件: 设备拆箱点件检查应有安装单位、供货单位、建设单位共同进行,并作好记录; 按照设备供货清单、技术文件,对设备及其附件、备件的规格、型号、数量进行详细核对; 电动机本体、控制和起动设备外观检查应无损伤及变形,油漆应完好; 电动机及其附属设备均应符合设计要求。 安装前的检查 电动机安装前应进行以下检查: 电动机应完好,不应有损伤现象。盘动转子应轻快,不应有卡阻及异 常声响。 电机的附件、备件应齐全无损伤。 电动机的安装: 电动机安装应由电工、事业部维修人员,大型电动机的安装需要搬运和吊装时应有起重工配合进行。 应审核电动机安装的位置是否满足检修操作运输的方便。 固定在基础上的电动机,一般应有不小于1.2m维护通道。 采用水泥基础时,如无要求,基础重量一般不小于电动机重量的3倍。基础各边应超出电机底座边缘100?150mm
JS500搅拌机主要参数
JS500搅拌机主要参数 主要技术参数 项目参数型号 JS500 出料容量 500L 进料容量 800L 生产率 25m3/h 骨料最大料径(卵石/碎石)mm 80/60 搅拌叶片转速 35r/min 数量2×7 搅拌电机型号 Y180M-4 功率 18.5kw 卷扬电机型号 YEZ132S-4-BS 功率 5.5kw 水泵电机型号 50DWB20-8A 功率 750W 料斗提升速度 18m/min 外形尺寸(长×宽×高)运输状态3050×2300×2680mm 工作状态4461×3050×5225mm 整机重量 4000kg 卸料高度 1500mm JDY500D 是指:单卧轴强制式搅拌机 单卧轴强制式搅拌机是一种新型多功能砼搅拌机械,该机使用范围广,可适用于豢塑性、干硬性、软骨料混凝土及各种灰浆、砂石的搅拌。该机具有结构简单、搅拌质量好、生产效率高、能耗低、噪声小、寿命长、维修保养方便等优点。适用于预制厂、公路、桥梁、码头等建筑工地。本机除作单机使用外,还可与配料机组合成简易式搅拌站。是您创优质工程的保证。 JDK500D主要技术参数: 出料容量:500升, 进料容量:800升, 生产能力:25-30立方米/小时, 整机质量:4500千克, 整机功率:15.55KW, 料斗提升速度:20米/分, 搅拌轴转速:25转/分, 搅拌时间:25-30秒, 骨料粒径:60/80MM. 外型尺寸:3300*2150*1870MM *JDY混凝土搅拌机有JDY350型,JDY350C型,JDY500型,JDY500D型。 JSY是指:双卧轴强制式搅拌机 混凝土搅拌机 JZC350 功率5.5KW,容量350L,生产率
电动机功率的选择
范例(1)TOP
负荷系数表负荷条件TOP 如何选择电机的计算公式 范例(2)TOP
电动机扭距计算 电机的“扭矩”,单位是N?m(牛米) 计算公式是T=9549 * P / n 。 P是电机的额定(输出)功率单位是千瓦(KW) 分母是额定转速n 单位是转每分(r/min) P和n可从电机铭牌中直接查到。 如果没有时间限制1000W的电动机可以拖动任何重量的物体 1.1KW的电机输出扭矩为7.2N*m,要是不经过减速要提升1T的东西是不可能的。很简单的道理你可以用P=FV/1000计算出你可以达到的最大升降速度,这里要根据你的传动装置考虑效率进去。F 单位是N,V单位是m/s,P千瓦。注意单位换算。计算下来最大升降速度为0.11m/s。 电动机的名牌上有功率P,有转速n,有功率因数cosφ一般为0.85-0.9左右,设效率为η一般为0.9左右, 设电机扭矩T 则,T=9550*P/n T---扭矩Nm P--功率KW n---转速r/min Tsav=0.5T(Ts+Tcr), Tsav:平均启动扭矩。Ts最初启动扭矩。Tcr:牵入扭矩。 电机负荷的计算方法 一、计算折合到电机上的负载转矩的方法如下: 1、水平直线运动轴: 9.8*μ·W·PB TL= 2π·R·η(N·M) 式PB:滚珠丝杆螺距(m) μ:摩擦系数 η:传动系数的效率 1/R:减速比 W:工作台及工件重量(KG) 2、垂直直线运动轴: 9.8*(W-WC)PB
TL= 2π·R·η(N·M) 式WC:配重块重量(KG) 3、旋转轴运动: T1 TL= R·η(N·M) 式T1:负载转矩(N·M) 二:负载惯量计算 与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。不管是直线运动还是旋转运动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载惯量。由以下基本公式就能得到几乎所有情况下的负载惯量。 1、柱体的惯量 D(cm) L(cm) 由下式计算有中心轴的圆柱体的惯量。如滚珠丝杆,齿轮等。 πγD4L (kg·cm·sec2)或πγ·L·D4(KG·M2) JK= 32*980 JK= 32 式γ:密度(KG/CM3) 铁:γ〧7.87*10-3KG/CM3=7.87*103KG/M3 铝:γ〧2.70*10-3KG/CM3=2.70*103KG/M3 JK:惯量(KG·CM·SEC2)(KG·M2) D:圆柱体直径(CM)·(M) L:圆柱体长度(CM )·(M) 2、运动体的惯量 用下式计算诸如工作台、工件等部件的惯量 W PB 2 JL1= 980 2π(KG·CM·SEC2) PB 2 =W 2π(KG·M2) 式中:W:直线运动体的重量(KG) PB:以直线方向电机每转移动量(cm)或(m) 3、有变速机构时折算到电机轴上的惯量 1、电机 Z2 J JO Z1 KG·CN:齿轮齿数 Z1 2 JL1= Z2 *J0 (KG·CM·SEC2)(KG·M2) 三、运转功率及加速功率计算 在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。一般可按下式求得。 1、转功率计算 2π·Nm·TL P0= 60 (W) 式中:P0:运转功率(W) Nm:电机运行速度(rpm) TL:负载转矩(N·M) 2、速功率计算
电机选型知识
旋转电机选型知识 一、电机的基本运行条件 GB755-2000《旋转电机定额和性能》中规定的电动机的基本运行条件包括:对海拔高度、环境温度、冷却介质和相对湿度的要求,电气条件,运行期间电压和频率的变化,电机的中点接地等规定。 1、海拔:一般不超过1000M。特殊要求,如微特电机的运行的海拔高度可达2500~31200m。 2、最高环境空气温度:电机运行地点的环境温度随季节而变化,一般不超过40℃。但一些专用电机可超过40℃,微特电机的最高环境温度为125℃。 3、最低环境温度:对已安装就位处于运行或断电停转电机,运行地点的最低环境温度为-15℃;对微特电机最低空气温度为-55℃。对于用水作为初级或次级冷却介质的电机的最低环境空气温度为5℃。 4、环境空气相对湿度:电机运行地点的最湿月份月平均最高相对湿度为90%,同时,该月月平均最低温度不高于25℃。 5、电压和电流的波形对称性:对于交流电动机,其电源电压波形的正弦性畸变率不超过5%;对于多相电动机,电源电压的负序分量不超过5%(长期运行)或1.5%(不超过几分钟的短式运行),且电压的零序分量不超过正序分量的1%。 6、运行期间电压的偏差:当电动机的电源电压(如为交流电源时,频率为额定)在额定值的95%~105%之间变化,输出功率仍能维持额定值。当电压发生上述变化时,电机的性能和温升允许偏离规定。 7、运行期间的频率偏差:但交流电机的频率(电压为额定)额定值的偏差不超过±1%时,输出功率仍能维持额定值。 8、电压和频率同时发生偏差:电压和频率同时发生偏差(两者偏差分别不超过±5%和±1%),若两者都是正值,且其和不超过6%;或两者均为负值,或分别为正值和负值,且其绝对值之和不超过5%时,电机输出功率仍能维持额定值。 9、电机的中性点接地:交流电机(Y连结)应能在中性点处于接地电位或接近接地电位的情况下连续运行。如果电机绕组的线端与中性点端的绝缘不同,应在电机的使用说明书中说明,未征得电机厂同意,不允许将电机的中性点接地或将多台电机的中性点相互连接。 二、电机的电压和频率的选取 1、我国的工频及电压:我国的工频电的频率是50Hz,电压等级分为:220V、380V、660V、1140V、3300V、6000V、10000V。
伺服电机如何进行选型知识讲解
伺服电机选型技术指南 1、机电领域中伺服电机的选择原则 现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。 各种电机的T-ω曲线 (1)传统的选择方法 这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。很显然。电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。用ω峰值,T峰值表示最大值或者峰值。电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。 (2)新的选择方法 一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。 在电机和负载之间的传动比会改变电机提供的动力荷载参数。比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。选择一个合适的传动比就能平衡这相反的两个方面。通常,应用有如下两种方法可以找到这个传动比n,它会把电机与工作任务很好地协调起来。一是,从电机得到的最大速度小于电机自身的最大速度ω电机,最大;二是,电机任意时刻的标准扭矩小于电机额定扭矩M额定。
电机分类及选型
电机分类及选型 一、电机分类: 电机是发电机和电动机的统称。其中发电机分为三相同步发电机和单相同步发电机。而电动机分为同步电动机和异步电动机。并且异步电动机更加广泛使用。异步电动机又分为:三相异步电动机和单相异步电动机。三相异步电动机还分为铸铁壳和铝壳两种,一般铸铁居多(标注字母Y、Y2、AS、JO2、JW、YS),铝壳较少(标注字母MS)。单相异步电动机包含有:1.单相电容起动异步电动机:YC(CO2)、JY、MC(铝壳);2.单相电阻起动异步电动机:YU(BO2)、JZ 、MU(铝壳);3.单相电容运转异步电动机:YY(DO2)、MY(铝壳);4.单相双值电容异步电动机:YL、ML(铝壳);5.罩极电动机。 二、电机主要性能对比:
三、电机型号命名: Y 2 100 L 2 — 4 系第中机铁极 列二心座心数 代次高长长 号设 计 1、系列代号: Y 2、设计代号: 2为第二次设计(改进) 1 为第一次设计 3、中心高H:从电机轴伸中心轴线至底脚平面的高度。按标准有:56、63、71、80、90、100、112、132、160、180、225、280、315及以上(中型电机) 4、机座长(L):按长短分S—短、M—中、L—长 5、铁心长:1—短、功率小;2—长、功率大 6、极数:影响电机转速。约:2极—2850r/min 4极:1450r/min 6极—930r/min 8极:720r/min 四、电机主要性能指标: 效率η:输出功率/输入功率0.4~0.9 功率因素:Cosφ0.6~0.98 起动转矩:0.5~3.0 起动电流:起动电流/额定电流=4~7倍 最大转矩:1.6~2.2倍 最小转矩:大于1.2倍
maxon电机选型手册
maxon EC motor160 maxon EC motor 2013年4月版/根据maxon标准规范的变化,我们为您提供了一个判断maxon motors最重要方面的方法。据我们所知,它涵盖了正常的应用。标准规格是我们“一般销售条件”的一部分。电气设备必须满足某些最低要求,这些要求是1996年1月1日之后引入欧洲市场的。小型电机将被视为部件,因此不代表指南意义上的单独电气设备。有关标准和指令的信息,请参阅第14页和第15页。maxon EC motor1第101号标准规范。本标准规定了在生产过程中对电动机进行的检验和试验。为了保证我们的高质量标准,我们在整个制造过程和整个电机过程中检查材料、零件和部件的特定测量和特性的符合性。记录获得的测量值,并在需要时提供给客户。随机抽样计划符合ISO 2859、MIL STD 105E和DIN/ISO 3951(属性检验、顺序抽样、变量检验)和内部制造控制。除非客户和maxon另有约定,否则本标准规范始终适用。数据2.1电气数据适用于22°至25°C,并使用带块换向的1象限控制器:数据控制在1分钟ute操作时间内执行。当电压≥3V时,测量电压为+/-0.5%,当电压≤3V时,测量电压为±0.015 V空载转速±10%空载电流≤最大规定值顺时针/逆时针旋转方向电机位置水平或垂直注:
测量电压可能与目录中列出的标称电压不同。目录中指定的空载电流是典型值,而不是最大值。按目录(或标签)连接电机时,轴从安装端顺时针旋转。通过随机抽样验证终端电阻。电感在产品认证期间确定。测试频率为1 kHz。终端电感取决于频率。这些测量完全保证了规定的机电参数。2.2外形图上的机械数据:标准测量仪器(用于电长度测量的DIN 32876、DIN 863千分尺、DIN 878千分表、DIN 862卡尺、DIN 2245孔径卡尺、DIN 2280螺纹卡尺等)2.3转子不平衡:电机转子采用空气磁通绕组,在制造过程中平衡根据我们的标准指南。对于带绕线定子齿的EC电机,转子安装在仪表上,但不作为标准平衡。在随机抽样过程中,只能对整个电机进行主观评价。2.4电气强度:每台电机完全组装好,然后根据直径在250或500 V直流电压下测试接地故障。2.5噪声:主观测试大量异常。根据速度的不同,电动机的运动会产生不同程度、频率和强度的噪声和振动。单个样品装置的噪声水平不应解释为未来交付的预测噪声或振动水平。2.6使用寿命:耐久性试验在统一的内部标准下进行,作为产品认证的一部分。EC电机的使用寿
怎样选择电机
怎样正确选择电动机? 电动机的功率.应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。选择时应注意以下两点: (1)如果电动机功率选得过小.就会出现“小马拉大车”现象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动机被烧毁。 (2)如果电动机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高(见表),不但对用户和电网不利。而且还会造成电能浪费。 要正确选择电动机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率(即生产机械轴上的功率)Pl(kw).可按下式计算所需电动机的功率P(kw): P=P1/n1n2 式中 n1为生产机械的效率;n2为电动机的效率。即传动效率。 按上式求出的功率,不一定与产品功率相同。因此.所选电动机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如果选用效率为0.8的电动机,试求该电动机的功率应为多少kw? 解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。 (2)短时工作定额的电动机.与功率相同的连续工作定额的电动机相比.最大转矩大,重量小,价格低。因此,在条件许可时,应尽量选用短时工作定额的电动机。 (3)对于断续工作定额的电动机,其功率的选择、要根据负载持续率的大小,选用专门用于断续运行方式的电动机。负载持续串Fs%的计算公式为 FS%=tg/(tg+to)×100% 式中 tg为工作时间,t。为停止时间min;tg十to为工作周期时间min。 此外.也可用类比法来选择电动机的功率。所谓类比法。就是与类似生产机械所用电动机的功率进行对比。具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电动机,然后选用相近功率的电动机进行试车。试车的目的是验证所选电动机与生产机械是否匹配。验证的方法是:使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电动机铭牌上标出的额定电流进行
步进电机的选用及电机型号参数尺寸标准
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。 步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。步进电机惯量低、定位精度高、无累积误差、控制简单等特点。广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。 选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。一般地说最大静力矩Mjmax大的电机,负载力矩大。 选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。但细分只能改变其分辨率,不改变其精度。精度是由电机的固有特性所决定。论文天地欢迎您 选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。 选择步进电机需要进行以下计算: (1)计算齿轮的减速比 根据所要求脉冲当量,齿轮减速比i计算如下: i=(φ.S)/(360.Δ) (1-1) 式中φ---步进电机的步距角(o/脉冲)
S ---丝杆螺距(mm) Δ---(mm/脉冲) (2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。 Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2) 式中Jt ---折算至电机轴上的惯量(Kg.cm.s2) J1、J2 ---齿轮惯量(Kg.cm.s2) Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N) S ---丝杆螺距(cm) (3)计算电机输出的总力矩M M=Ma+Mf+Mt (1-3) Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4) 式中Ma ---电机启动加速力矩(N.m) Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2) n---电机所需达到的转速(r/min) T---电机升速时间(s) Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5) Mf---导轨摩擦折算至电机的转矩(N.m) u---摩擦系数 η---传递效率 Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6) Mt---切削力折算至电机力矩(N.m) Pt---最大切削力(N) (4)负载起动频率估算。数控系统控制电机的启动频率与负载转矩和惯量有很大关系,其估算公式为 fq=fq0[(1-(Mf+Mt))/Ml)÷(1+Jt/Jm)] 1/2 (1-7) 式中fq---带载起动频率(Hz)
搅拌桨叶的选型和设计计算
第二节搅拌桨叶的设计和选型一、搅拌机结构与组成 组成:搅拌器电动机 减速器容器 排料管挡板 适用物料:低粘度物料 二、混合机理 利用低粘度物料流动性好的特性实现混合 1、对流混合 在搅拌容器中,通过搅拌器的旋转把机械能传给液体物料造成液体的流动,属强制对流。包括两种形式: (1)主体对流:搅拌器带动物料大范围的循环流动 (2)涡流对流:旋涡的对流运动 液体层界面强烈剪切旋涡扩散 主体对流宏观混合 涡流对流 2、分子扩散混合 液体分子间的运动微观混合 作用:形成液体分子间的均匀分布 对流混合可提高分子扩散混合 3、剪切混合 剪切混合:搅拌桨直接与物料作用,把物料撕成越来越薄的薄层,达到混合的目的。 高粘度过物料混合过程,主要是剪切作用。 电 动 机 减速器 搅 拌 器 容 器 排料管
三、混合效果的度量 1、调匀度I 设A 、B 两种液体,各取体积vA 及vB 置于一容器中, A B A B a b 则容器内液体A 的平均体积浓度CA0为: (理论值) 经过搅拌后,在容器各处取样分析实际体积浓度CA ,比较CA0 、CA , 若各处 CA0=CA 则表明搅拌均匀 若各处 CA0=CA 则表明搅拌尚不均匀,偏离越大,均匀程度越差。 引入调匀度衡量样品与均匀状态的偏离程度 定义某液体的调匀度 I 为: (当样品中CA CA0时) 或 (当样品中CA CA0时) 显然 I ≤1 若取m 个样品,则该样品的平均调匀度为 当混合均匀时 2、混合尺度 设有A 、B 两种液体混合后达到微粒均布状态。 B A A A V V V C +=00A A C C I =0 11A A C C I --=m I I I I m +??++=- 211 =- I
步进电机选型
步进电机选型 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1) 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A 偏移(て-1/3て)=2/3て。如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这
搅拌器参数选型表
搅拌器提资表表格:QL308 客户名称(业主):Client / Owner: 联系人:Contactor: 地址:Contact address: 电话:Telephone: 项目名称:Project Description: 传真:Facsimile: 设备名称:Equipment Name: 位号:Item No.: 搅拌釜数据必填 T A N K D A T A 圆形槽 Circular Tank (mm) 长形槽 Rectangle Tank (mm) 方形槽 Square Tank (mm) ( ) ( ) ( ) ( ) ( ) ( ) 槽体尺寸: Tank Dimension: 挡板数量: Qty. of Baffle 宽度: Width of baffle mm 长度: Length of baffle mm 离壁距离: Off-wall clearance mm 安装形式: Mounting 顶入 Top Entering 偏置 Off-set Entering 侧入 Side Entering 斜入 Inclined Entering 底入 Bottom Entering 装料量: Feed mass 最大 Max. m3 最小 Min. m3 空运转: No-load run 有 Y 否 N 安装环境: Installation 室内 ndoor 室外 Outdoor 操作条件及要求必填O P E R A T I N G D A T A 组分 Component 颗粒度 Granularity 重量 Weight ( % ) 体积 Volume ( % ) 密度 Density ( kg/m3 ) 粘度 Viscosity ( cp ) 温度 Temperature ( ℃ ) 压力 Pressure ( mPa ) 操作: Operating 设计: Design 混合物 Mixture 应用过程: Function of Agitator 混匀 Homogenizing 悬浮 Suspension 溶解 Solution 气体分散 Gas Dispersion 反应 Reaction 萃取 extraction 吸收 Absorption 传热 Heat Transfer 防止沉淀 Deposition Prevented 曝气 Aeration 发酵 Ferment 乳化 Emulsification 结晶 Crystallization 絮凝 Flocculation 稀释 Dilution 其它 Other 搅拌强度: Intensity of Mixing 温和(1~2级 Mild (class 1~2) 适中(3~5级) Moderate (class 3~5) 强烈(6~8级) Intensive (class 6~8) 剧烈(9~10级) Strenuous (class 9~10) 操作方式: Operating 连续 Continuous 间歇 Batch 混合时间: Mixing Time 分(min) 流体排量: Flowing Capacity m3/s ( ) ( )
减速电机选型指南
选型指南 为了选到最合适的减速电机,有必要了解该减速电机所驱动机器的详尽技术特性,就必须确定一个使用系数fB。 使用系数fB。 减速电机的选用首先应确定以下技术参数:每天工作小时数;每小时起停次数;每小时运转周期;可靠度要求;工作机转矩T工作机;输出转速n出;载荷类型;环境温度;现场散热条件;减速机通常是根据恒转矩、起停不频繁及常温的情况设计的。其许用输出转矩T由下式确定:T=T出 X fB 使用系数 T 出————减速电机输出转矩 fB————减速电机使用系数 传动比i i=n入 / n出电机功率P(kw) P=T出 * n出 / 9550 * η输出转矩T出(N.m) T出=9550* P*η/n出式中:n入——输入转速η——减速机的传动效率 在选用减速电机时,根据不同的工况,必须同时满足以下条件: 1、T出≥T 工作机 2、T=fB总 *T工作机式中:fB总——总的使用系数,fB总 =fB*fB1*KR*KW fB——载荷特性系数,KR——可靠度系数 fB1——环境温度系数; KW——运转周期系数 首先确定要进口减速机还是国产减速机,, 现在不管进口还是国产的大部分厂家都有自己的命名标准, 所以最好找个减速机样本,根据样本来选型。 但是,一定要提供以下数据 1.减速机用在什么设备上,以便确定安全系数SF(SF=减速机额定功率处以电机功率),安装形式(直交轴,平行轴,输出空心轴键,输出空心轴锁紧盘等)等 2.提供电机功率,级数(是4P、6P还是8P电机) 3.减速机周围的环境温度(决定减速机的热功率的校核) 4.减速机输出轴的径向力和轴向力的校核。需提供轴向力和径向力 减速机扭矩计算公式: 速比=电机输出转数÷减速机输出转数("速比"也称"传动比") 1.知道电机功率和速比及使用系数,求减速机扭矩如下公式: 减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数
怎样正确选择电动机的功率
怎样正确选择电动机的功率? 来源:电动车高速电机,高速无刷电机,电动车配件-宁波市鄞州恒泰机电有限公司 电动机的功率.应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。选择时应注意以下两点:(1>如果电动机功率选得过小.就会出现“小马拉大车”现象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动机被烧毁。 (2)如果电动机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。 要正确选择电动机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率(即生产机械轴上的功率)Pl(kw).可按下式计算所需电动机的功率 P(kw):P=P1/n1n2式中n1为生产机械的效率;n2为电动机的效率。即传动效率。 按上式求出的功率,不一定与产品功率相同。因此.所选电动机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如果选用效率为0.8的电动机,试求该电动机的功率应为多少kw?
解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。(2)短时工作定额的电动机.与功率相同的连续工作定额的电动机相比.最大转矩大,重量小,价格低。因此,在条件许 可时,应尽量选用短时工作定额的电动机。 (3)对于断续工作定额的电动机,其功率的选择、要根据负载持续率的大小,选用专门用于断续运行方式的电动机。负载持续串Fs%的计算公式为 FS%=tg/(tg+to)×100%式中tg为工作时间,t。为停止时间min;tg十to为工作周期时间min。 此外.也可用类比法来选择电动机的功率。所谓类比法。就是与类似生产机械所用电动机的功率进行对比。具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电动机,然后选用相近功率的电动机进行试车。试车的目的是验证所选电动机与生产机械是否匹配。验证的方法是:使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电动机铭牌上标出的额定电流进行对比。如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大.则表明所选电动机的功率合适。如果电动机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电动机的功率选得过大(即“大马拉小车”应调换功率较小的电动机。如果测得的电动机工作电流比铭牌上标出的额定电流大40%以上.则表明电动机的功率选得
伺服电机选型技术的指南
米购人员必看-- 伺服电机选型 伺服电机在工控领域是最常见的产品之一,采购人员在采购伺服电机时需要对伺服电机有个 全面的了解,找到真正的适合产品,不仅可以使机器快速兼容的运转,同时对于企业提高效率、节能减排也功不可没,下面简单给大家介绍下伺服电机的选型 1、机电领域中伺服电机的选择原则 现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。首先要选岀满足给定负载 要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。 各种电机的T- 曲线 (1 )传统的选择方法 这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示, 对于旋转运动用角速度(t),角加速度(t)和所需扭矩T(t)表示,它们均可以表示为时间的 函数,与其他因素无关。很显然。电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是 受限制的。用峰值,T峰值表示最大值或者峰值。电机的最大速度决定了减速器减速比的上限,n 上限=峰值,最大/峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限 大于n上限,选择的电机是不合适的。反之,则可以通过对每种电机的广泛类比来确定上下限之间 可行的传动比范围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常 繁琐。 (2)新的选择方法 一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行 性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。 这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可 用图解的形式表示并且适用于各种电机。因此,不再需要用大量的类比来检查电机是否能够驱动 某个特定的负载。 在电机和负载之间的传动比会改变电机提供的动力荷载参数。比如,一个大的传动比会减小外部扭矩对电机运 转的影响,而且,为输岀同样的运动,电机就得以较高的速度旋转,产生较 大的加速度,因此电机需要较大的惯量扭矩。选择一个合适的传动比就能平衡这相反的两个方面。通常,应用有如下 两种方法可以找到这个传动比n,它会把电机与工作任务很好地协调起来。一 是,从电机得到的最大速度小于电机自身的最大速度电机,最大;二是,电机任意时刻的标准扭矩 小于电机额定扭矩M额定。