逆变电源的数字控制技术
四桥臂三相逆变器的控制策略
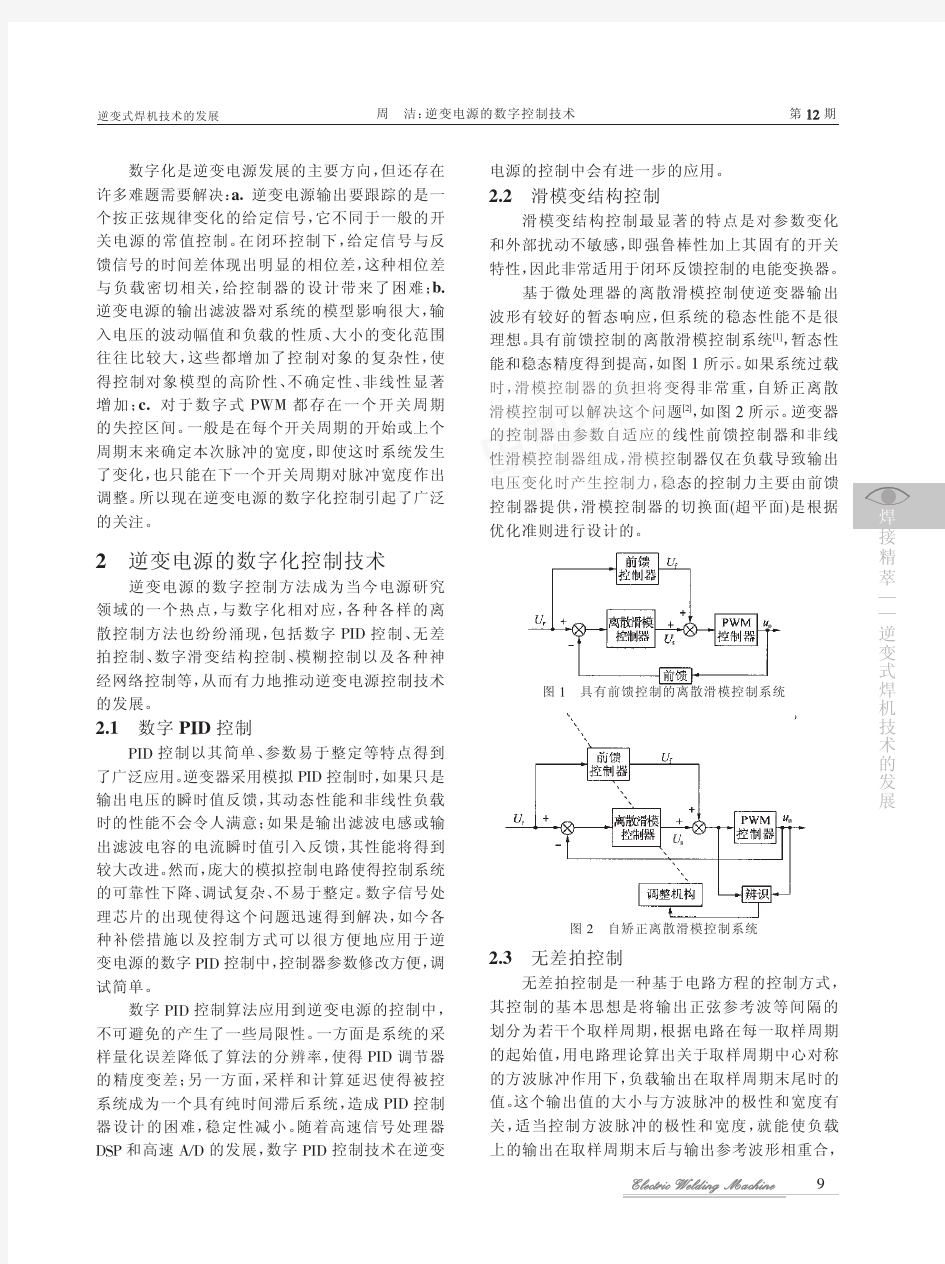
四桥臂三相逆变器的控制策略 阮新波严仰光 摘要提出了一种新型的三相四线逆变器,它有四个桥臂,第四个桥臂用来构成中点,从而省去了三相三桥臂逆变器中的中点形成变压器,减小了逆变器的体积和重量。针对这种逆变器,本文提出了一种电流调节器,它根据三相滤波电感电流和给定电流的误差值最大的那相选择逆变器的开关模态。为了消除输出相电压的静态误差,本文讨论 了一种基于PI调节器改进的电压调节方案。仿真结果表明,本文的思路是可行的。本 文为构造大功率、高效率的三相四线逆变器提供了可靠的理论基础。 关键词:三相逆变器控制策略 The Control Strategy for Three-Phase Inverter with Four Bridge Legs Ruan Xinbo Yan Yangguang (Nanjing University of Aeronaut ics & Astronautics 210016 China) Abstract A novel three phase inverter with four bridge legs i s presented in this paper.The inverter eliminates the neutral forming transforme r by adding a bridge leg to form neutral point to provide balanced voltages to a ny kinds of three phase loads.The principle of the inverter is analyzed,and a ne w current regulator,which chooses switching modes a ccording to the maximum cur rent error of filter inductance current and the reference current is proposed.Th e modified voltage regulator on the basis of PI regulator is proposed to elimina te output voltage static error under any load conditions. Keywords:Three-phase Inverters Control strategies 1 引言 三相逆变器一般是采用三个桥臂组成的拓扑结构,为了给不对称负载供电,必须在 输出端加入一个中点形成变压器(Neutral Formed Transformer,NFT),如图1所示。中点形成变压器是变比为1的自耦变压器,工作频率为输出交流电的频率,体积和重 量很大,而且体积和重量随着负载不对称的程度变化而变化,不对称度越大,NFT的体积重量也就越大。
逆变电源控制算法哪几种
https://www.360docs.net/doc/ec18644912.html,/ 逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点:
https://www.360docs.net/doc/ec18644912.html,/ PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。
逆变电源的几种控制算法
逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,鲁棒性好,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点: PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。 重复控制
机电系统中的数字控制技术
86 1 全方位数字闭环的伺服控制技术 以物体的方位、位置、姿式等作为被控量,是数字控制系统中的伺服系统。这种控制系统的根本目的就是按照系统给予的速度以及运动轨迹,任意变化跟踪目标,来实现准确的跟踪与定位的一种技术。它需要保障系统中有充足的能量,才能推动负载输入指令,在规律的运作下,输入与输出的偏差,不得超出规定的范围。伺服系统作为一个高性能、高技术的产品,在一些定位精度与动态响应下,可以提供灵活、准确、快速、方便的驱动,这使得它在较高的机电一体化产品中,得到广泛的应用。其中符合数字化控制模式的数字式伺服系统,非常跟得上数字控制技术的潮流,它在调试方面广受好评,使用起来也非常简单。 最近一段时间,工控机控制技术在大部分的交流伺服系统中都广泛被采用。为了使操作简单易学,提供友好的人机界面给操作员,因而采用工控机与下位机的通信。同时,还采用DSP(专用数字信号处理器)与新型高速微处理器的伺服控制技术,将全方位替代以模拟为电子器件为主的伺服控制技术。使DSP的高速运算能力得到充分发挥,增强调节功能,自动完成整个伺服系统,甚至还可以实时调节系统增益,负载跟踪其中的变化。为了将原来的硬件伺服控制转变为软件伺服控制,实现全方位数字化的闭环伺服控制,提高系统的定位精准度与动态响应的速度,有部分驱动器具备快速傅立叶变换的功能,将设备的机械共振点测算出来,再通过陷波滤波的方式,消除机械共振。以下就是PC 运动控制卡的闭环伺服控制系统图。 图1 全数字闭环伺服控制系统组成结构图 2 先进的现代化数字伺服驱动技术 传统的工业控制单元需要向信息化、数字化转变,是因为信息技术的发展。正是由于信息技术与传统驱动技术相结合,才会出现代表它们的数字驱动技术,这将是21世纪伺服驱动领域里的关键技术之一。同时,伺服系统中数字化的交流应用也日趋广泛,客户对伺服驱动技术的要求也越来越高,引起了 试析机电系统中的数字控制技术 刘军高 (广州数控设备有限公司,广东 广州 510165) 摘要: 在这个以“科技”为主题的现代化机电控制系统中,关键领域的科学技术就取决于数控技术,它集多种高新技术为一体,其中包括了微电子与计算机技术,信息处理与自动检测、控制技术等。它们都具有高精度、高效率的特点,柔性自动化能力强,便于实现制造业的集成化、自动化、智能化。文章通过论述数字控制技术几个方面的新发展与变化,希望能够为机电系统的设计提供一点帮助。关键词: 智能数控;伺服控制;现场总线;DSP ;PCC 中图分类号: TP273 文献标识码:A 文章编号:1009-2374(2012)25-0086-032012年第25期(总第232期)NO.25.2012 (CumulativetyNO.232)
逆变器的基本知识
浅谈光伏发电系统用逆变器的基本知识 逆变器的概念 通常,把将交流电能变换成直流电能的过程称为整流,把完成整流功能的电路称为整流电路,把实现整流过程的装置称为整流设备或整流器。与之相对应,把将直流电能变换成交流电能的过程称为逆变,把完成逆变功能的电路称为逆变电路,把实现逆变过程的装置称为逆变设备或逆变器。 现代逆变技术是研究逆变电路理论和应用的一门科学技术。它是建立在工业电子技术、半导体器件技术、现代控制技术、现代电力电子技术、半导体变流技术、脉宽调制(PWM)技术等学科基础之上的一门实用技术。它主要包括半导体功率集成器件及其应用、逆变电路和逆变控制技术3大部分。 逆变器的分类 逆变器的种类很多,可按照不同的方法进行分类。 1.按逆变器输出交流电能的频率分,可分为工频逆变器、中频逆器和高频逆变器。工频逆变器的频率为50~60Hz的逆变器;中频逆变器的频率一般为400Hz到十几kHz;高频逆变器的频率一般为十几kHz到MHz。 2.按逆变器输出的相数分,可分为单相逆变器、三相逆变器和多相逆变器。 3.按照逆变器输出电能的去向分,可分为有源逆变器和无源逆变器。凡将逆变器输出的电能向工业电网输送的逆变器,称为有源逆变器;凡将逆变器输出的电能输向某种用电负载的逆变器称为无源逆变器。 4.按逆变器主电路的形式分,可分为单端式逆变器,推挽式逆变器、半桥式逆变器和全桥式逆变器。 5.按逆变器主开关器件的类型分,可分为晶闸管逆变器、晶体管逆变器、场效应逆变器和绝缘栅双极晶体管(IGBT)逆变器等。又可将其归纳为“半控型”逆变器和“全控制”逆变器两大类。前者,不具备自关断能力,元器件在导通后即失去控制作用,故称之为“半控型”普通晶闸管即属于这一类;后者,则具有自关断能力,即无器件的导通和关断均可由控制极加以控制,故称之为“全控型”,电力场效应晶体管和绝缘栅双权晶体管(IGBT)等均属于这一类。 6.按直流电源分,可分为电压源型逆变器(VSI)和电流源型逆变器(CSI)。前者,直流电压近于恒定,输出电压为交变方波;后者,直流电流近于恒定,输也电流为交变方波。 7.按逆变器输出电压或电流的波形分,可分为正弦波输出逆变器和非正弦波输出逆变器。
Numerical control technology数字控制技术--aps审核
Numerical control technology NC refers to the automation of machine tools that are operated by abstract program. Compared with manual control, NC is more efficient and can machine more complicated shapes. This course briefly introduces history of NC, some basic codes(such as G codes and M codes), and steps of making numerical controlling programs. As for the make numerical controlling programs, first of analyse the workpiece and determine the machining path according to the sketch, then, select the proper turning tools according to their different functions, after that, determine the machining parameters, such as spindle speed, feed rate, depth of cutting, and so on. At last, make the program and try it
电压控制逆变器
电压控制逆变器 The voltage control inverter 为了获得高性能的逆变器,设计控制器的控制目标包括提高输出电压稳态和动态性能2个方面。目前,有关逆变器的控制方法除了工程应用成熟的PID控制[1-2]外,主要还有重复控制[3-4]、滑模控制[5-6]、无差拍控制[7-8]、模糊控制[9-10]及各种复合控制[11-14]等,这些控制方法在提高输出电压的稳态精度和负载变化时的动态响应方面,取得了一定的研究成果。然而以上控制方法主要从输出端考虑,很少考虑输入端对输出的影响,以电压源逆变器为例,以上控制方法在设计时一般都把直流输入电压看作恒定不变的。实际情况是,直流输入电压由于前级不可控整流或本身输入电压不稳定的影响并 不是恒定直流,另外负载电流中若含有谐波也会在直流输入电压上产生谐波电压[15]。此外,以上控制方法中除了PID控制,大部分 控制方法由于其复杂控制算法只能用数字控制来实现,且因条件限制不能很好地广泛应用于实践。为此,本文以常见的单相全桥逆变器为例,在传统电压模式基础上,提出了一种前馈型电压模式控制方案,控制原理上利用开关变换器稳态输入/输出占空比关系构造变换器 的控制方程,引入输入电压前馈使得其波动不会对输出电压产生影响,同时在无积分反馈环节下输出电压就能稳定跟踪参考信号,避免了PID控制中为提高稳态精度而引入积分环节造成系统稳定性下降和 动态性能滞后的影响。控制实现上采用输入电压积分电路来求解方程中的开关占空比,控制电路结构简单,便于用模拟电路实现。进行了
性能分析并与采用传统PID控制的逆变器模型进行比较,理论分析 表明前馈型电压模式控制逆变器具有稳态跟踪性能好、抗输入电压扰动以及对负载跳变动态响应好的优点。进行了仿真对比并设计了2种控制方法的模拟电路进行实验验证,结果表明理论分析的正确性和前馈型电压模式控制的有效性。 1前馈型电压模式控制逆变器原理 本文研究的对象为单相全桥电压源逆变器,如图1所示。4只功率开关管分为2组,其中VT1和VT4为一组,VT2和VT3为一组,输入直流电压ui经2组开关交替导通和关断,得到输出交流方波电压ud,再经LC低通滤波器后得到交流正弦输出电压uo。假设负载为纯电阻负载,同时忽略电感和电容的串联等效电阻。要使输出电压uo跟踪参考电压信号uref,最基本的控制方法是电压模式闭环反馈PID控制,一般需要引入积分环节来提高稳态精度,仅有比例环节很难实现输出电压稳定跟踪,但是引入积分环节又会带来一些问题,如降低系统稳定性和影响动态性能。此外,在输入端由于实际逆变器中直流输入电压并不是恒定不变的,在仅有反馈的情况下输出电压受输入电压波动的影响。为此,在传统电压模式结构基础上,考虑在无积分环节时仍能保证输出电压的稳态精度,同时引入输入电压前馈来消除其波动对输出电压的影响。本文所提前馈型电压模式控制原理如图2所示,在PWM时引入输入电压前馈,由于稳态时输入/输出电压在一个开关周期存在固有的占空比关系,因此由输入/输出电压可以利用PWM 比较器和积分复位电路得到稳态占空比,即稳态时可得d=g(ui,uo),
逆变器的下垂控制
下垂控制的原理是什么。? 下垂控制是并网逆变器的常用控制原理,但是具体下垂控制的深层原理和物理含义是什么啊?查到的几乎所有的文献对此都是基于下垂控制XXXX、仿照同步发电机下垂特性XXXX,却没有一个真正说清楚仿照哪了,电机书上对同步发电机的下垂特性也没讲清楚其物理原理。向各位知乎大神求教,我看网上也有很多问这个的却没有一个回答说清楚的。 添加评论 分享 简单来说,所谓下垂控制就是选择与传统发电机相似的频率一次下垂特性曲线(Droop Character)作为微源的控制方式,即分别通过P/f下垂控制和Q/V下垂控制来获取稳定的频率和电压,这种控制方法对微源输出的有功功率和无功功率分别进行控制,无需机组间的通信协调,实现了微源即插即用和对等控制的目标,保证了孤岛下微电网内电力平衡和频率的统一,具有简单可靠的特点。—————————————————————————————————————————— 补充说一说。 学过电机学都知道,发电机有个功角特性曲线,其中凸极同步发电机的 无功功率表达式是: 有功 功率表达式: 我们可以看出,通过控制U和功角来控制有功功率P和无功功率Q。那么反过来, 可以通过控制有功功率P和无功功率Q来控制U和功角 所以, 微电网中的常规下垂控制是通过模拟传统发电机的下垂特性,实现微电网中微电源的并联运行。其实质为:各逆变单元检测自身输出功率,通过下垂特性得到输出电压频率和幅值的指令值,然后各自反相微调其输出电压幅值和频率以达到系统有功和无功功率的合理分配。 逆变器输出电压频率和幅值的下垂特性为:
其中w0,U0分别为逆变器输出的额定角频率,额定电压。kp,kq为逆变器下垂系数。P,Q 分别为逆变器实际输出的有功功率和无功功率。P0,Q0分别为逆变器额定有功和无功功率。 由上式我们可以得到三相逆变器常规的P-f 和Q-U 下垂控制框图。 注:常规下垂控制是在系统并联逆变器的输出端等效阻抗为大电感的条件下推导得到的。然而不同电压等级的连接线路对应不同的阻感比。 在电压等级较低的线路中,阻感比相对较高。 加之每个逆变器到交流母线的距离不同,线路越长,线路电阻越大,可能会导致线路电阻相对线路感抗较大,常规下垂控制已经不能满足低压微电网控制的需求。 所以就有了一种改进型功率耦合下垂控制策略。 因为低压微电网中线路阻抗的影响已经不能完全忽视,有功功率和无功功率对电压和频率的调节存在耦合关系。 逆变电源输出的有功功率P和无功功率Q可以写为: 单台逆变器到交流母线的功率传输示意图:
数字控制是一种自动控制技术
数字控制是一种自动控制技术,是用数字化信号对机床的运动及其加工过程进行控制的一种方法。机床本体,即数控机床的机械结构部分,主要包括主轴、床身和立柱导轨及进给传动等。数控装置,机床控制核心,通常为一台通用或专用微机,由输入装置、控制运算器和输出装置等构成。伺服系统,即数控机床的执行机构,以移动部件位置和速度作为控制量,包括驱动和执行两部分。其它辅助装置,电器、液压、气动、冷却、排屑、润滑、储运、对刀、编程等。控制介质,将零件加工信息传送到数控装置的信息载体。如穿孔带、磁带、磁盘等。普通机床机械结构存在问题:1刚性和抗振性差。2传动部件惯量大。3传动副摩擦及间隙大。数控机床的优点:1提高生产率;2数控机床可以提高零件的加工精度,稳定产品质量;3有广泛的适应性和较大的灵活度;4可以实现一机多用;5可以进行精度的成本计算和生产进步安排,减少在制品,加速资金周转,提高经济效益;6不需要专用夹具;7大大的减轻了工人的劳动强度。按控制运动的方式分类 1.点位控制数控机床:只控制移动部件的终点位置,对运动过程中的轨迹没有严格要求,在移动过程中不进行加工。2.直线控制数控机床:不仅要控制移动部件的终点位置,还要控制两点间移动的速度和轨迹,移动过程中进行加工,通常轨迹为平行机床坐标轴的直线。3. 轮廓控制数控机床:(连续切削控制系统)能同时对两个或两个以上的坐标轴进行连续控制。即不仅控制移动部件的起点终点,而且控制整个加工过程中每点的速度与位置,从而加工出任意形状的曲线或曲面类复杂零件。按伺服系统分类1. 开环伺服数控机床:机床没有检测反馈装置,数控装置发出的信号是单向的2.闭环伺服数控机床:机床最终执行部件上安装有检测反馈装置,将检测到的实际位置反馈到数控装置中,与指令位置进行比较后用差值进行控制,直至差值为零。3.半闭环伺服数控机床:机床中间传动元件上安装有检测反馈装置,将检测到的实际位置反馈到数控装置中,与指令位置进行比较后用差值进行控制,直至差值为零。按联动轴数分类 : 两轴联动、两轴半联动、三轴联动、四轴联动、五轴联动。加工中心结构特点:主传动方式:1具有变速齿轮的主传动系统2通过带传动的主传动系统3有调速电动机直接驱动的主传动系统4内装电动机主轴。齿轮变速主传动系统:在带有齿轮变速的主传动系统中,电液控制拨叉方式和电磁离合器是两种常用的变速操纵方式。动变速常用多楔带和同步带。同步带又称为同步齿形带,按齿形不同又可分为梯形齿同步带和圆弧齿同步带两种。调速电机直接驱动主轴传动数控机床—般采用直流或交流主轴伺服电动机直接驱动主轴实现无级变速。主轴直接驱动还有另一种方式是内置电动机主轴变速。将调速电动机与主轴合成一体(电动机转子轴即为机床主轴),这种变速方式大大简化了主轴箱体与主轴的结构,有效地提高了主轴部件的刚度,但主轴的输出转矩较小,电动机发热对主轴精度影响较大。数控机床主轴部件常用轴承类型:1锥孔双列圆柱滚子轴承:该轴承只能承受径向载荷。2 双列推力向心球轴承:接触角60°,该轴承一般与双列圆柱滚子轴承配套用作主轴的前支承,并将其外圈外径作成负公差,保证只承受轴向载,3双列圆锥滚子轴承:这种轴承能同时承受径向和轴向载荷,通常用作主轴的前支承。4角接触球轴承:这种类型的轴承既可承受径向载荷,又可承受轴向载荷。接a触角有α=15°,α=25°和α=40°三种。15°接触角多用于轴向载荷较小,转速较高的场合;将内、外圈相对轴向位移,可以调整间隙,实现预紧。这种轴承还可以三联组配、四联组配。主轴的支承形式:1、前支承采用双列圆柱滚子轴承+双列60o角接触球轴承。后支承采用成对角接触球轴承。2、全部采用高精度角接触球轴承。特点:刚度相对较低,为了提高承载力,增加前轴承数量,并配套予紧转速高。3、采用双列和单列圆锥滚子轴承。特点:刚度高,能承受重载尤其是较强动载荷的作用,安装调整方便,但转速和精度较低。合理配置轴承,可以提高主轴精度,降低温升,简化支承结构。加工中心主轴部件:1、轴承配置:前支承配置了三个高精度角接触球轴承,用以承受径向载荷和轴向载荷,后支承为一对小口相对配置的角接触球轴承,它们只承受径向载荷,2刀具自动装卸机构:主轴内部和后端安装的是刀具自动装卸机构,加工用的刀具通过各种标准刀夹安装在主轴上。3主轴定向装置数控机床进给系统常用伺服进给系统来工作,将数控系统传来的指令经过放大处理控制执行部件运动。联轴器:连接两传动轴使之一起回转,以传递扭矩和运动的装置。联轴器类型:液力式、电磁式、机械式,以机械式应用最为广泛。机械式联轴器分类a刚性联轴器:1套筒联轴器2凸缘联轴器 b无弹性绕性联轴器:1,万向联轴器:万向联轴器用于轴线相交的两轴联接,两轴轴线夹
逆变器控制
Design and Control for LCL-Based Inverters with Both Grid-Tie and Standalone Parallel Operations Chien-Liang Chen, Jih-Sheng Lai, Yu-Bin Wang, Sung-Yeul Park, and Hide Miwa Virginia Polytechnic Institute and State University Future Energy Electronics Center 415 Whittemore Hall, Blacksburg, VA 24061-0111, USA jlchen99@https://www.360docs.net/doc/ec18644912.html,, laijs@https://www.360docs.net/doc/ec18644912.html,, ybwang@https://www.360docs.net/doc/ec18644912.html,, supark@https://www.360docs.net/doc/ec18644912.html,, and hmiwa1@https://www.360docs.net/doc/ec18644912.html, Abstract—The inductor-capacitor-inductor (LCL) filter allows higher noise attenuation and universal output in which a power conditioning system or an inverter can operate in both grid-tie and standalone modes. In this paper, the LCL filter design considerations including sensor position selection and component selections are discussed for single-phase paralleled inverters operating in both grid-tie and standalone modes. For grid-tie mode operation, each inverter is operating under a single current loop with proportional-resonant controller and admittance path compensation to reduce the steady-state error by providing a high gain at the fundamental frequency. For standalone mode operation, one of the inverters is implemented with a dual-loop controller to regulate the output voltage while the rest inverters operate in single current-loop controller with communication channels in between to ensure the uniformity of current sharing. Both the simulation and experimental results verify that the designed controllers are capable of paralleling inverter operation in grid-tie and standalone modes by adapting to different controller settings while keeping the same hardware setup. Keywords-LCL filter, grid-tie inverter, dual-loop control, PR controller, parallel inverter, admittance compensation. I.I NTRODUCTION The parallel inverter systems have demonstrated many advantages compared to a single high-power inverter [1-8]. For example, an inverter can be designed in modular manner which allows the system capacity to be multiplied and the reliability can be greatly improved with redundancy. Parallel inverter operation has been a major topic in uninterruptible power system (UPS) applications where the design is focused on the standalone operation, and the output stage is typically an inductor-capacitor (LC) filter. When connecting the paralleled inverters to utility grids, the capacitor becomes redundant, and thus either a pure inductor (L) or an LCL filter can be used as the inverter output stage. Compared with the L filter, the LCL filter is more attractive [9] because it can not only provide higher high-frequency harmonics attenuation with the same inductance value, but also allow the inverter to operate in both standalone and grid-tie modes, which makes it a universal inverter for distributed generation applications such as fuel cell and photovoltaic power conditioning system (PCS). Major factors that were used in LCL design considerations include inductor current ripple magnitude and reactive power consumption in capacitor [10], the range of LCL resonant frequency, and the total inductance value of LCL filter [11]. In this paper, the sensor position selection and the universal application in both grid-tie and standalone modes are added as the LCL design factors. The compliance of interconnect standards IEEE 1547 and 1547.1 [12,13] and their current harmonic limits can also be used in the LCL design criteria. However, the cause of inverter harmonic distortions were mainly found in nonlinear effects such as nonlinear device voltage drop, dead time, limited PWM resolution and lack of stiffness in dc link [14]. The controller with high gain at the harmonic frequencies such as proportional-resonant (PR) controller [15] and direct-quadrant (DQ) frame current controller [16,17] can be potential candidates to alleviate such harmonic distortions. In addition to harmonic concerns, the controller design for parallel inverter systems must consider stability and steady-state error issues. In general, parallel inverters are designed in standalone mode for UPS and distributed generation (DG) systems that supply regulated output voltages when grid is not available. Most reported standalone inverter systems use a LC filter and proportional-integral (PI) controller in their control loops [18-20]. In [18,19], multiple feedback loops were proposed to improve the output voltage performance and to damp the poles of LC filter. In [20], feedback, feed-forward, and nonlinear controls were considered for the entire UPS control system. These parallel inverter systems, however, are usually designed with LC filter [1-8] which will have difficulties in grid-tie operations due to the undetermined resonant frequency caused by the change of grid-side source impedance [21]. The design of parallel inverters also needs to consider the current sharing capability [5-6] and the communication [7-8] among paralleled inverters. In [5], some current-sharing schemes for parallel inverter systems including master-salve control, current-limit control, and circular-chain control are examined and compared. In [6], a current-weight-distribution control was proposed to allow inverters in parallel with different output current capability. In [7], the controller area network (CAN) communication interface is utilized in a parallel inverter system to obtain a higher reliability. In [8], a new voltage and frequency droop control for parallel inverter systems is proposed to allow a robust current sharing without communication between inverters. In this paper, the paralleled inverters adopt the LCL filter as the output stage to allow the inverter to operate in both grid-tie
一种数字控制SPWM逆变器的设计
一种数字控制SPWM逆变器的设计 王伟,尹真,黎昌浪 (西北工业大学,陕西西安710072) 摘要:研究了一种数字控制逆变器,采用智能功率模块Ps21865,减少了系统的复杂性,提高系统的可靠性。分析了单极性sPwM控制策略的优点和应用场合,给出了基于转速/电流双闭环控制的sPwM 阈制策略,完成了对直流变频空调压缩机的控制,并给出实验波形。 关键词:sPwM逆变器;单极性;智能功率模块;双闭环控制 O引言 随着电力电子技术的发展,各种逆变器在各行业中应用十分广泛。具有高速运算能力的DsP的问世,使逆变器控制的全数字化成为现实,许多先进的现代控制理论和方法在逆变器中得到应用,使逆变器的稳定性和可靠性大幅度提高。目前正弦脉宽调制技术SPwM是应用最广泛的技术。与PwM方波驱动相比,正弦波驱动时无刷直流电动机的机械特性和转矩特性并无明显变化,但是采用正弦波驱动方式的无刷直流电动机,具有效率高、转矩波动小、噪声低、响应快、调速特性好、运行可靠、控制特性优良等优点。sPwM 制驱动又可以分为单极性驱动和双极性驱动两种。双极性驱动适合于对效率没有要求的高精度伺服应用场合,而对于像家电这类对系统能效有较高要求而调速控制精度要求不是很高场合,更适合采用单极性驱动。本文设计了一种数字控制逆变器,采用智能功率模块和单极性sPwM控制策略,完成了转速/电流双闭环控制。 l逆变器电路设计 常用的电力电子全控型功率半导体器件有晶闸管、功率场效应管、双极型晶体管等。功率场效应管具有开关速度高、电压控制实现简单等优点,但是器件导通时压降较大,且电压、电流容量相对较小;双极型晶体管的优缺点则正好与功率场效应管的优缺点相反。绝缘栅一双极型复合晶体管(以下简称IGBT)是功率场效应管与双极型晶体管所形成的复合器件,综合了两者的优点,广泛应用于各种大中型电力电子装置当中。 各种分立型功率器件需要设计专门的驱动电路才能实现使器件工作在开关状态并获得较低的动静态 损耗的效果,而随着功率器件工作频率不断提高,分立元件固有的引线电感、寄生电容等对器件造成了更
逆变器控制技术中国专利现状分析
逆变器控制技术中国专利现状分析 发表时间:2019-07-08T09:45:52.650Z 来源:《电力设备》2019年第4期作者:魏小凤郑植1 [导读] 摘要:可再生能源发电并网逆变器技术是近年来的发展热点,而逆变器技术中,其控制尤为重要,包括最大功率跟踪(MPPT)、能量变换、无功补偿与谐波抑制、故障穿越、孤岛等,因此,为了更全面了解我国逆变器控制技术的发展,本文针对可再生能源发电并网逆变器技术的国内专利进行了检索,并针对其控制技术进行系统分析,以期获得相关关键技术的发展现状,进而助力我国新能源的发展。 (国家知识产权局专利局专利审查协作天津中心天津 300300)摘要:可再生能源发电并网逆变器技术是近年来的发展热点,而逆变器技术中,其控制尤为重要,包括最大功率跟踪(MPPT)、能量变换、无功补偿与谐波抑制、故障穿越、孤岛等,因此,为了更全面了解我国逆变器控制技术的发展,本文针对可再生能源发电并网逆变器技术的国内专利进行了检索,并针对其控制技术进行系统分析,以期获得相关关键技术的发展现状,进而助力我国新能源的发展。 关键词:可再生能源发电;并网逆变器;控制引言 在当今能源紧缺的严峻形式下,光伏风力等可再生能源并网发电技术已经成为不少国家大力发展的一项技术,而逆变器是其中的关键技术[1-2],分析逆变器控制技术的发展现状非常有必要。 本文针对可再生能源发电并网逆变器技术的国内外专利进行了检索,本次检索在德温特世界专利索引数据库(DWPI)中进行,检索截止日期为2018年8月21日,得到3655篇关于逆变器技术的专利申请。按照技术原创国将在华专利申请分为中国专利申请和国外来华专利申请,从控制技术方面对中国发明专利申请和国外来华专利申请进行了标引,分别从各技术分支占比以及申请趋势两方面对中国专利申请和国外来华专利申请进行对比分析,以期根据二者的差异性,得到相关的结论。 1各技术分支占比图1、2分别示出了中国专利申请和国外来华专利申请的逆变器控制分支占比。根据图1、2可以看出,二者的重点均放在MPPT、能量变换控制以及无功补偿与谐波抑制三个分支上,且国外来华专利申请中,MPPT占比稍大,而中国专利申请中,能量变换控制占比稍大,无功补偿与谐波抑制占比二者相当。其次,关于故障穿越以及孤岛检测技术方面,二者均占比较小。 2各技术分支申请趋势图3、4分别示出了中国专利申请和国外来华专利申请的逆变器控制分支专利申请趋势,由图3、4可知,中国的专利申请的各控制技术分支申请量从2011年开始到2014年为增长趋势,到2015年各分支申请量均大幅降低,从2015至2017年呈上升且波动变化;而国外来华专利申请中各拓扑技术分支从2009年到2011年为增长趋势,自2011年以后为下降波动趋势。可见,单从趋势上来看,国外关于逆变器各控制分支相关技术早于中国。而在具体到各控制技术分支中时,MPPT、能量变换控制以及无功补偿与谐波抑制是三个最受关注的研究分支。MPPT注重于发出能量的最大化,能量变换控制侧重于能量转化的效率,而无功补偿与谐波抑制则是可再生能源发出的电能能够并网到大电网系统中的基础性的关键技术,只有通过有效的无功补偿控制并滤除谐波才能将稳定性相对很差的可再生能源发出的电能馈送到电网系统当中,因此,无论是国内还是国外的申请人都在无功补偿与谐波抑制方面给予了相当的重视,国内申请人的申请量在近几年的攀升势头更是十分强劲。
数字化控制技术
数字化控制技术 概况 数控技术,简称“数控”。英文:Numerical Control(NC)。是指用数字、文字和符号组成的数字指令来实现一台或多台机械设备动作控制的技术。它所控制的通常是位置、角度、速度等机械量和与机械能量流向有关的开关量。数控的产生依赖于数据载体和二进制形式数据运算的出现。1908年,穿孔的金属薄片互换式数据载体问世;19世纪末,以纸为数据载体并具有辅助功能的控制系统被发明;1938年,香农在美国麻省理工学院进行了数据快速运算和传输,奠定了现代计算机,包括计算机数字控制系统的基础。数控技术是与机床控制密切结合发展起来的。1952年,第一台数控机床问世,成为世界机械工业史上一件划时代的事件,推动了自动化的发展。现在,数控技术也叫计算机数控技术,目前它是采用计算机实现数字程序控制的技术。这种技术用计算机按事先存贮的控制程序来执行对设备的控制功能。由于采用计算机替代原先用硬件逻辑电路组成的数控装置,使输入数据的存贮、处理、运算、逻辑判断等各种控制机能的实现,均可以通过计算机软件来完成。 发展趋势 数控技术的应用不但给传统制造业带来了革命性的变化,使制造业成为工业化的象征,而且随着数控技术的不断发展和应用领域的扩大,他对国计民生的一些重要行业(IT、汽车、轻工、医疗等)的发展起着越来越重要的作用,因为这些行业所需装备的数字化已是现代发展的大趋势。从目前世界上数控技术及其装备发展的趋势来看,其主要研究热点有以下几个方面。 1.高速、高精加工技术及装备的新趋势 2.5轴联动加工和复合加工机床快速发展 3.智能化、开放式、网络化成为当代数控系统发展的主要趋势 4.重视新技术标准、规范的建立 1)关于数控系统设计开发规范 2)关于数控标准 程序编制方法 1.手工编程 2.自动编程 3.CAD/CAM 国内发展概况 长期以来,国产数控机床始终处于低档迅速膨胀,中档进展缓慢,高档依靠进口的局面,特别是国家重点工程需要的关键设备