【CN109946659A】一种车载毫米波雷达线性调频连续波运动频率扩展校正方法【专利】
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910170757.8
(22)申请日 2019.03.07
(71)申请人 东南大学
地址 210000 江苏省南京市玄武区四牌楼2
号
(72)发明人 黄永明 曹孟德 宫玉琴 张铖
王海明
(74)专利代理机构 南京经纬专利商标代理有限
公司 32200
代理人 许方
(51)Int.Cl.
G01S 7/40(2006.01)
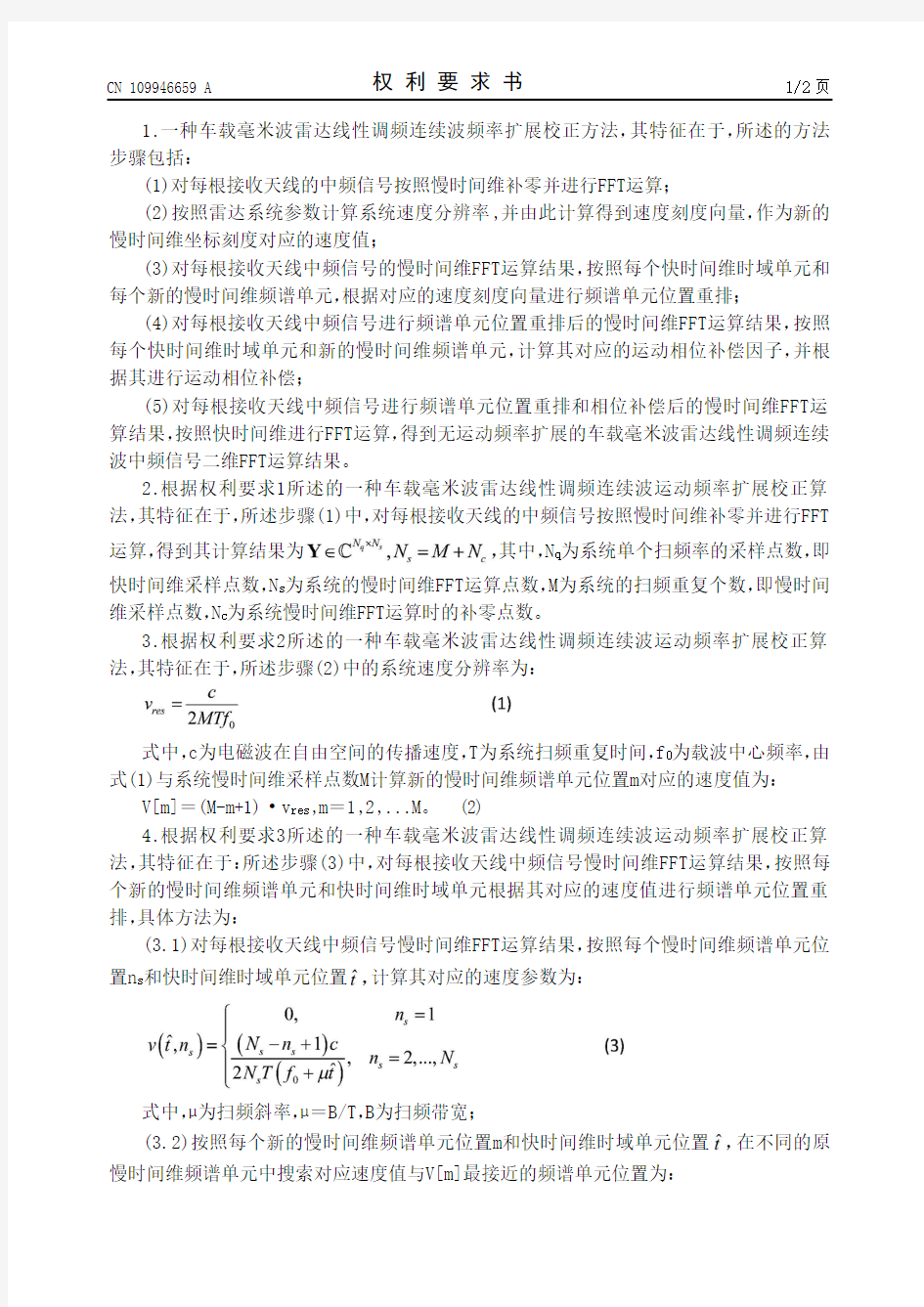
(54)发明名称一种车载毫米波雷达线性调频连续波运动频率扩展校正方法(57)摘要本发明公开一种车载毫米波雷达线性调频连续波频率扩展校正方法,该方法步骤为:首先对每根接收天线的线性调频连续波中频信号,按慢时间维补零并进行FFT运算;其次,根据系统的速度分辨率计算新的慢时间维频谱单元对应的速度刻度;接着按照每个新的慢时间维频谱单元和快时间维时域单元,根据对应的速度刻度,对每根接收天线中频信号慢时间维FFT结果进行匹配重排并进行运动相位补偿;最后对匹配重排及相位补偿后的慢时间维FFT运算结果按照快时间维进行FFT运算,得到无运动频率扩展影响的线性调频连续波二维FFT运算结果。该方法能够解决已有技术方案中车载毫米波雷达线性调频连续波的运动频率扩展问题,明显地提升系统性能,其复杂度较低、
实现简单。权利要求书2页 说明书5页 附图4页CN 109946659 A 2019.06.28
C N 109946659
A
1.一种车载毫米波雷达线性调频连续波频率扩展校正方法,其特征在于,所述的方法步骤包括:
(1)对每根接收天线的中频信号按照慢时间维补零并进行FFT运算;
(2)按照雷达系统参数计算系统速度分辨率,并由此计算得到速度刻度向量,作为新的慢时间维坐标刻度对应的速度值;
(3)对每根接收天线中频信号的慢时间维FFT运算结果,按照每个快时间维时域单元和每个新的慢时间维频谱单元,根据对应的速度刻度向量进行频谱单元位置重排;
(4)对每根接收天线中频信号进行频谱单元位置重排后的慢时间维FFT运算结果,按照每个快时间维时域单元和新的慢时间维频谱单元,计算其对应的运动相位补偿因子,并根据其进行运动相位补偿;
(5)对每根接收天线中频信号进行频谱单元位置重排和相位补偿后的慢时间维FFT运算结果,按照快时间维进行FFT运算,得到无运动频率扩展的车载毫米波雷达线性调频连续波中频信号二维FFT运算结果。
2.根据权利要求1所述的一种车载毫米波雷达线性调频连续波运动频率扩展校正算法,其特征在于,所述步骤(1)中,对每根接收天线的中频信号按照慢时间维补零并进行FFT 运算,
得到其计算结果为其中,N q 为系统单个扫频率的采样点数,即快时间维采样点数,N s 为系统的慢时间维FFT运算点数,M为系统的扫频重复个数,即慢时间维采样点数,N c 为系统慢时间维FFT运算时的补零点数。
3.根据权利要求2所述的一种车载毫米波雷达线性调频连续波运动频率扩展校正算法,其特征在于,
所述步骤(2)中的系统速度分辨率为:
式中,c为电磁波在自由空间的传播速度,T为系统扫频重复时间,f 0为载波中心频率,由式(1)与系统慢时间维采样点数M计算新的慢时间维频谱单元位置m对应的速度值为:
V[m]=(M -m+1)·v res ,m=1,2,...M。 (2)
4.根据权利要求3所述的一种车载毫米波雷达线性调频连续波运动频率扩展校正算法,其特征在于:所述步骤(3)中,对每根接收天线中频信号慢时间维FFT运算结果,按照每个新的慢时间维频谱单元和快时间维时域单元根据其对应的速度值进行频谱单元位置重排,具体方法为:
(3.1)对每根接收天线中频信号慢时间维FFT运算结果,按照每个慢时间维频谱单元位置n s
和快时间维时域单元位置
计算其对应的速度参数为:
式中,μ为扫频斜率,μ=B/T,B为扫频带宽;
(3.2)按照每个新的慢时间维频谱单元位置m和快时间维时域单元位置
在不同的原慢时间维频谱单元中搜索对应速度值与V[m]最接近的频谱单元位置为:
权 利 要 求 书1/2页2CN 109946659 A
24G毫米波雷达在机车测距及避撞应用的探索
24G毫米波雷达在机车测距及避撞应用的探索 最近接到一个项目,需要在机车上设计一款雷达产品,主要用于轨道交通 方面的机车测距和避撞。在网上搜寻了一段时间,可以选择的有激光雷达、超 声波雷达、红外雷达和毫米波雷达。对比了各个雷达的特点,激光雷达具有探 测距离远,探测精确的特点,但是容易受到雨雾,特别是下雪和粉尘的干扰, 这个在轨道交通行业中适应性不是很好。超声和红外雷达,具有价格低,设计 简单的优点,但是同样容易受到温度变化的影响,在南方和北方会有很大的差别,另外探测的距离也有限。毫米波雷达探测的介质是电磁波,具有探测距离远、穿透能力强、环境适应性强以及实时性好等优点,尤其是波长较短者。 俗话说万事开头难!在搜寻了各大厂商的方案之后,最终选择了UMS 的 24G 雷达方案,选择这个方案有几点好处: 1)方案比较灵活,可以选择集成度高、设计相对简单的单发双收的雷达芯片。也可利用分立器件自由组合出多个收发结合的方案,这样可以探测更加精 准和扩展更广阔的探测范围。 2)拥有业界唯一的GaAs 工艺,工作温度范围为-40 度125 度,适用于机车工作环境。 3)开发工具和参考资料比较齐全。 在笔者的项目中,选择的是集成度较高的单芯片方案CHC2442-QPG。从图1 CHC2442-QPG 的内部架构,可以看出其内部集成了低噪声的VCO、Tx PA、混频器、接收LNA 和中频放大器等核心功能。只需加上DSP 处理单元就可以 完成雷达的功能设计。如图2 UMS 机车24G 雷达模块原理框图所示,雷达模块支持单发双收和一路视频,与车载控制单元之间通过CAN 总线以及以太网 进行通讯。
【CN110082734A】汽车车载毫米波雷达外部标定的标定装置、标定系统及标定方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910349602.0 (22)申请日 2019.04.28 (71)申请人 安徽瑞泰智能装备有限公司 地址 243000 安徽省马鞍山市当涂县承接 产业转移示范园区北京大道嘉善科技 园内 (72)发明人 舒金林 邓书朝 童宝宏 晋入龙 孙晋军 孙畅 柳敏 秦然然 (74)专利代理机构 芜湖思诚知识产权代理有限 公司 34138 代理人 阮爱农 (51)Int.Cl. G01S 7/40(2006.01) G01S 13/93(2006.01) (54)发明名称汽车车载毫米波雷达外部标定的标定装置、标定系统及标定方法(57)摘要本发明公开了汽车车载毫米波雷达外部标定的标定装置、标定系统和标定方法。本发明汽车车载毫米波雷达外部标定的标定装置,它包括底板、吸波反射机构,吸波反射机构放置在底板上;吸波反射机构包括若干块吸波材料板、若干个雷达反射装置、上支撑底座,吸波材料板和雷达反射装置均固定在上支撑底座上,每个雷达反射装置的前面至少设置有一个吸波材料板,上支撑底座放置在底板上。在汽车生产线或汽车维修服务站中使用本发明外部标定的标定装置和标定系统,可以实现对雷达安装位置的标定,用于校正汽车车载毫米波雷达支架装置的安装位置,从而保证汽车所装的雷达位置正确,从而提高了 车辆的安全性能。权利要求书2页 说明书7页 附图3页CN 110082734 A 2019.08.02 C N 110082734 A
权 利 要 求 书1/2页CN 110082734 A 1.汽车车载毫米波雷达外部标定的标定装置,其特征是:它包括底板(9)、吸波反射机构,吸波反射机构放置在底板(9)上;吸波反射机构包括若干块吸波材料板(4)、若干个雷达反射装置(5)、上支撑底座(6),吸波材料板(4)和雷达反射装置(5)均固定在上支撑底座(6)上,每个雷达反射装置(5)的前面至少设置有一个吸波材料板(4),上支撑底座(6)放置在底板(9上。 2.根据权利要求1所述的标定装置,其特征是:雷达反射装置(5)优选为四个,每个雷达反射装置(5)包括上部的标准反射目标、下部的底座,两者固接,底座固定在上支撑底座(6)上;雷达反射装置(5)上部的标准反射目标是RCS(雷达散射截面积)为0dB的标准角反射器。 3.根据权利要求1所述的标定装置,其特征是:所述的吸波材料板(4)为雷达波专用吸波材料,其个数不少于雷达反射装置(5)的个数。 4.根据权利要求1所述的标定装置,其特征是:标定装置还包括左右移动机构,左右移动机构包括左右驱动电机(1)、横向传动齿轮(2)、横向传动齿条(3)、下支撑底座(7)、运动滚轮组(8),支撑块(11)、齿条支撑块(12);下支撑底座(7)位于上支撑底座(6)的下面、两者相接触,运动滚轮组(8)设置在下支撑底座(7)的下面,且与底板(9)相接触,左右驱动电机(1)的输出端连接横向传动齿轮(2),横向传动齿轮(2)与横向传动齿条(3)相啮合,左右驱动电机(1)通过支撑块(11)固定在底板(9)上,横向传动齿条(3)的左端从左边的齿条支撑块(12)中穿过、其右端固定在右边的支撑块(12)中,左边的齿条支撑块(12)固定在底板(9)上,右边的齿条支撑块(12)固定在下支撑底座(7)的底面上。 5.根据权利要求4所述的标定装置,其特征是:左右移动机构还包括左右移动辅助机构,左右移动辅助机构包括两个移动单元,两个移动单元相对于横向移动齿条(3)前后对称设置;每个移动单元均包括横向移动导杆(13)、左右两个小支撑块(14),横向移动导杆(13)的左端从左边的小支撑块(14)中穿过、其右端固定在右边的小支撑块(14)中,左边的小支撑块(14)固定在底板(9)上,右边的小支撑块(14)固定在下支撑底座(7)的底面上。 6.根据权利要求1或4所述的标定装置,其特征是:标定装置还包括上下移动机构,上下移动机构包括上下驱动电机(10)、纵向传动齿轮(15)、纵向传动齿条(16);上下驱动电机(10)的输出端连接纵向传动齿轮(15),纵向传动齿轮(15)与纵向传动齿条(16)相啮合,纵向传动齿条(16)一端为自由端,另一端与连接块(17)固接,连接块(17)固定在上支撑底座 (6)上,上下驱动电机(10)通过支撑座(21)固定在下支撑底座(7)上。 7.根据权利要求6所述的标定装置,其特征是:上下移动机构还包括导向板(20),导向板(20)固定在支撑座(21)上,其与纵向传动齿条(16)之间通过V形槽配合。 8.根据权利要求6所述的标定装置,其特征是:上下移动机构还包括上下移动辅助机构,上下移动辅助机构包括两个移动单元,两个移动单元相对于纵向移动齿条(16)前后对称设置;每个移动单元均包括纵向移动导杆(18)、导向套(19),纵向移动导杆(18)的下端固定在下支撑底座(7)上,导向套(19)套在纵向移动导杆(18)外、其下端固定在上支撑底座(6)上。 9.汽车车载毫米波雷达外部标定的标定系统,其特征是:它包括一套权利1-8任一所述的汽车车载毫米波雷达外部标定的标定装置,还包括一个实施标定毫米波雷达安装位置的雷达标定区域、已安装毫米波雷达传感器的待标定车辆、标定控制柜; 其中,雷达标定区域位于汽车总装车间检测线的前部或汽车维修服务站; 2
频率源综述
频率源综述 高树廷刘洪升 本文对频率源的类型和它们的基本原理 并对频率源的重要性 关键词 它的好坏直接影响雷达通 讯仪表等的性能指标它们的电子系 统性能好频谱分析仪这些仪表的关 键技术是有一个好的频率源有关单位就展开了频率合成技术的研制工作因技术难度大 到了80年代国内整机单位因工程需要这些研制班子经过 20多年的奋斗研制班子变动多次频率综 合技术与发达国家相比这足够证明频率源技术的难度 2.频率源简介 频率源是用来提供各种信号的电子设备随着 电子技术的发展即相位噪声越来越低 它们的频率稳定度一般在10-5以上` ?′?μ?ê×?o??÷???μ?ê?′óDè???ì?μ? ???°×?D??μ?ê2????ü×?μ?uHZ óè???ì?è c. 自动化使用灵活方便 自激振荡源和合成频率源常见的自 激振荡源有晶体振荡器介质振荡器YIG振荡器和波形产生器 等调谐带宽表1给出他们的区别和特点 技术含量高 合成频率源主要优点是频率稳定度高甚至比原 子钟的相噪还低控制方便缺点造价高合成频率源 一般可分为四大形式直接数字式频综 它们的优缺点由表2给出
项目相噪杂散频率步进工作频率跳频速度调制能力体积重量成本直接模拟式很好较难抑制很难做小全频段快有限大高 直接数字式好很难抑制很小低快方便小较低间接模拟式好好较难做小全频段慢有限较小较高间接数字式较好较好较小较低慢有限小低 2.2 合成频率源的主要技术指标 合成频率源的输出频率范围输出波形和调制状态电源 下面仅对相噪频率步进和跳频时间四项 做一简介 相噪就是短期频率稳定度是输出频率两边富氏频率的 函数记为 -dBc/HZ?ü?±?óó°?ì??′úμ?×ó?μí3μ?D??ü ó°?ì?óê??úμ??ì2a?üá|?à????éùμ?′óD?ó?ê?3??μ?ê óD1?既按20lgN变坏 杂散又没有被充分的抑制掉 一般用偏离输出频率多少频率上的频谱功率表示它也是 合成频率源的一项重要技术指标一般要求-60dBc 频率步进是一个频率点一个频率点合成出来的 把起始频率到终止频率叫最大频率步进 也就是频率捷变时间这段时间叫 跳频时间一般用相位差定义 以上四项技术指标是合成频率源中最重要的技术指标 3.合成频率源的基本原理 合成频率源的合成方法不同分直接模拟式间接模拟式和间接数字式四种 简介如下 归纳起来都是对基准频率进行各种各样的加减乘 除倍频器可视为对频率相乘通过对 频率进行加减乘除产生出各种新频率经放 大器这种方法也是经典方法目前100MHZ 晶振市场上能买到-169dBc/HZ@10kHZ的产品杂散决定滤波器的好坏 和电磁兼容性设计的合理程度目前开关速度一般在几 十nus到几百nus?a1?μ?í¨??±è???úò?°???oüo? ?a???μ×?è?1?2???ì?D???2¨?÷ò2oü??éè ??3é±???ê??±?ó?£?aê??μ×?μ??÷òaè±μ? DDS DDS?üê1ó?êy×???ê?íê3é?μ ?êoí2¨D?μ?o?3é??ì??2°?2¨D?μ?·ù?è2?êyoí?à??D??¢ 1¤×÷ê±°′òa?ó1??éè?3?D??¢êy?Y?ù?-1y??2¨?ííê3é á??±?óêy×?ê?μ?o?3é?í′??úá??ˉ???è?êìa
汽车毫米波雷达项目可行性研究报告
汽车毫米波雷达项目可行性研究报告 xxx有限责任公司
摘要 本文件内容所承托的权益全部为项目承办单位所有,本文件仅提供给项目承办单位并按项目承办单位的意愿提供给有关审查机构为投资项目的审批和建设而使用,持有人对文件中的技术信息、商务信息等应做出保密性承诺,未经项目承办单位书面允诺和许可,不得复制、披露或提供给第三方,对发现非合法持有本文件者,项目承办单位有权保留追偿的权利。 该汽车毫米波雷达项目计划总投资19124.63万元,其中:固定资产投资15243.33万元,占项目总投资的79.71%;流动资金3881.30万元,占项目总投资的20.29%。 达产年营业收入28234.00万元,总成本费用22190.78万元,税金及附加339.43万元,利润总额6043.22万元,利税总额7216.20万元,税后净利润4532.41万元,达产年纳税总额2683.79万元;达产年投资利润率31.60%,投资利税率37.73%,投资回报率23.70%,全部投资回收期5.72年,提供就业职位576个。 项目总论、建设必要性分析、市场前景分析、建设规模、项目选址科学性分析、土建工程设计、工艺先进性分析、环境影响概况、安全经营规范、风险应对说明、项目节能评估、项目实施计划、投资方案分析、经济效益可行性、项目评价结论等。
汽车毫米波雷达项目可行性研究报告目录 第一章项目总论 第二章项目承办单位基本情况 第三章建设必要性分析 第四章项目选址科学性分析 第五章土建工程设计 第六章工艺先进性分析 第七章环境影响概况 第八章风险应对说明 第九章项目节能评估 第十章实施进度及招标方案 第十一章人力资源 第十二章投资方案分析 第十三章经济效益可行性 第十四章项目评价结论
毫米波雷达技术及其发展趋势
1.引言 毫米波的工作频率介于微波和光之间,因此兼有两者的优点。它具有以下主要特点: 1)极宽的带宽。通常认为毫米波频率范围为26.5~300GHz,带 宽高达273.5GHz。超过从直流到微波全部带宽的10倍。即使考虑大气吸收,在大气中传播时只能使用四个主要窗口,但这四个窗口的总带宽也可达 135GHz,为微波以下各波段带宽之和的5 倍。这在频率资源紧张的今天无疑极具吸引力。 2)波束窄。在相同天线尺寸下毫米波的波束要比微波的波束 窄得多。例如一个 12cm的天线,在9.4GHz时波束宽度为18度,而94GHz时波速宽度仅1.8度。因此可以分辨相距更近的小目标或者更为清晰 地观察目标的细节。 3)与激光相比,毫米波的传播受气候的影响要小得多,可以认为具有全天候特性。 4)和微波相比,毫米波元器件的尺寸要小得多。因 此毫米波系统更容易小型化。由于毫米波的这些特点,加上在电子对抗中扩展频段是取得成功的重要手段。毫米波技术和应用得到了迅速的发展。 2.毫米波技术的应用 表面上看来毫米波系统和微波系统的应用范围大致是一样的。但实际上两者的性能有很大的差异,优缺点正好相反。因此毫米波系统经常和微波系统一起组成性能 互补的系统。下面分述各种应用的进展情况。 2.1毫米波雷达 毫米波雷达的优点是角分辨率高、频带宽因而有利于采用脉冲压缩技术、多普勒颇移大和系统的体积小。缺点是由于大气吸收较大,当需要大作用距离时所需的发 射功率及天线增益都比微波系统高。下面是一些典型的应用实例。 2.1.1 空间目标识别雷达它们的特点是使用大型天线以得到成像所需的角分辨率和足够高的天线增益,使用大功率发射机以保证作用距离。例如一部工作 于35GHz的空间目标识别雷达其天线直径达36m。用行波管提供10kw的发射功率,可以拍摄远在16,000km处的卫星的照片。一部工作于 94GHz的空间目标识别雷达的天线直径为13.5m。当用回族管提供20kw的发射功率时,可以对14400km 远处的目标进行高分辨率摄像。 2.1.2汽车防撞雷达因其作用距离不需要很远,故发射机的输出功率不需要很高,但要求有很高的距离分辨率(达到米级),同时要能测速,且雷达的体积 要尽可能小。所以采用以固态振荡器作为发射机的毫米波脉冲多普勒雷达。采用脉冲压缩技术将脉宽压缩到纳秒级,大大提高了距离分辨率。利用毫米波多普勒颇 移大的特点得到精确的速度值。 2.1.3直升飞机防控雷达现代直升飞机的空难事故中,飞机与高压架空电缆相撞造成的事故占了相当高的比率。因此直升飞机防控雷达必须能发现线径较细 的高压架空电缆,需要采用分辨率较高的短波长雷达,实际多用3mm雷达。 2.1.4精密跟踪雷达实际的精密跟踪雷达多是双频系统,即一部雷达可同时工作于微波频段(作用距离远而跟踪精度较差)和毫米波频段(跟踪精度高而作
实时三维频率步进式探地雷达技术介绍及应用案例分析
实时三维频率步进式探地雷达技术介绍及应用案例分析 ◆最快的步进频率雷达:利用数字频率信号源, 可以产生0.5-10 毫秒的扫描周期,一个同相接收机,使得整个扫描周期(一般为几个毫秒)100%可被有效利用。 ◆天线阵技术,可容纳21个天线阵子:覆盖范围从100MHz 到3GHz。实际工作时,用户无需更换天线就可采集从100MHz 到3GHz频率的数据。 ◆CMP(共中点)采集模式:这套系统可以设置为CMP(共中点)采集模式,可实时显示各层的厚度和对应的介电常数,并基于路基材料的介电常数与其密实度,含水量的相关曲线,评定路基质量。 ◆空前的区域勘察速度(工作效率):极其高的勘察效率和有效的采样方法使得 GeoScope TM采用2.4m天线阵可以以80km/h车速提供7.5×7.5cm网格完全三维图像。生产效率高达20亩/小时。 ◆数据采集过程中的三维实时显示技术:浏览器即可调用采集数据,实现实时三维显示(包括横向剖面、纵向剖面,水平切面)。 ◆软件处理能力超强:完整而快速的进行数据后处理,可加入注解及地理图像,且可以进行二次开发。 挪威3D-Radar公司成立于2001年,为国防、航空和安全高技术产品全球制造商——美国Chemring Sensors and Electronic Systems (Chemring SES)集团的子公司。3D-Radar公司拥有高质量三维雷达技术,从传统的脉冲信号雷达转为新的频率步进雷达,且具有丰富的GPR数据处理经验。 与市场上广泛使用的单通道脉冲式探地雷达系统相比,挪威3D-Radar公司的GeoScopeTM三维探地雷达系统具有如下特点: 频率步进雷达技术、实时三维显示、多通道天线阵技术、软件超强的处理能力 应用领域: ◆公路检测:面层厚度和质量、垫层和基层、桥梁检测 (脱空/剥离) ◆桥梁面板检测 ◆铁路路基检测:垫层厚度和质量、基层、电缆和管道 ◆机场跑道检测:沥青层厚度和质量、基层、脱空、电缆和管道 ◆地下公用设施 (管线/电缆):地下公用设施 ◆考古 ◆地雷和未爆炸物探测
雷达原理复习
第一章绪论 1、雷达的任务:测量目标的距离、方位、仰角、速度、形状、表面粗糙度、介电特性。 雷达是利用目标对电磁波的反射现象来发现目标并测定其位置。 当目标尺寸小于雷达分辨单元时,则可将其视为“点”目标,可对目标的距离和空间位置角度定位。目标不是一个点,可视为由多个散射点组成的,从而获得目标的尺寸和形状。采用不同的极化可以测定目标的对称性。 β任一目标P所在的位置在球坐标系中可用三个目标确定:目标斜距R,方位角α,仰角 在圆柱坐标系中表示为:水平距离D,方位角α,高度H 目标斜距的测量:测距的精度和分辨力力与发射信号的带宽有关,脉冲越窄,性能越好。目标角位置的测量:天线尺寸增加,波束变窄,测角精度和角分辨力会提高。 相对速度的测量:观测时间越长,速度测量精度越高。 目标尺寸和形状:比较目标对不同极化波的散射场,就可以提供目标形状不对称性的量度。 2、雷达的基本组成:发射机、天线、接收机、信号处理机、终端设备 3、雷达的工作频率:220MHZ-35GHZ。L波段代表以22cm为中心,1-2GHZ;S波段代表10cm,2-4GHZ;C波段代表5cm,4-8GHZ;X波段代表3cm,8-12GHZ;Ku代表2.2cm,12-18GHZ;Ka代表8mm,18-27GHZ。 第二章雷达发射机 1、雷达发射机的认为是为雷达系统提供一种满足特定要求的大功率发射信号,经过馈线和收发开关并由天线辐射到空间。 雷达发射机可分为脉冲调制发射机:单级振荡发射机、主振放大式发射机;连续波发射机。 2、单级振荡式发射机组成:大功率射频振荡器、脉冲调制器、电源 触发脉冲 脉冲调制器大功率射频振荡器收发开关 电源高压电源接收机 主要优点:结构简单,比较轻便,效率较高,成本低;缺点:频率稳定性差,难以产生复杂的波形,脉冲信号之间的相位不相等 3、主振放大式发射机:射频放大链、脉冲调制器、固态频率源、高压电源。射频放大链是发射机的核心,主要有前级放大器、中间射频功率放大器、输出射频功率放大器 射频输入前级放大器中间射频放大器输出射级放大器射频输出固态频率源脉冲调制器脉冲调制器 高压电源高压电源电源 脉冲调制器:软性开关调制器、刚性开关调制器、浮动板调制器 4、现代雷达对发射机的主要要求:发射全相参信号;具有很高的频域稳定度;能够产生复杂信号波形;适用于宽带的频率捷变雷达;全固态有源相控阵发射机 5、发射机的主要性能指标:
24GHz汽车毫米波雷达实验报告
24GHz汽车毫米波雷达实验报告 是德科技射频应用工程师王创业1. 前言 汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。典型原理框图如图1所示。汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。 汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。不同体制雷达在产品实现复杂程度和应用上都是有区别的。FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。 2.实验目的 在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。 利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。基于以上的问题,该实验主要实现以下三个目的: 1)软件硬件结合,SystemVue+仪表实现各类信号的产生; 2)系统设计仿真、算法验证 3)VCO线性调制度分析 4)场景信号录制回放和信号分析 3.实验要求 该实验采用FMCW雷达体制,结合SystemVue软件和仪表实现以下功能: 1)汽车雷达信号产生 a.24GHz标准雷达信号产生:Triangle调制信号、Sawtooth调 制信号
毫米波相控阵雷达及其应用发展_石星
文章编号:1001-893X(2008)01-0006-07 毫米波相控阵雷达及其应用发展* 石星 (中国西南电子技术研究所,成都610036) 摘要:概述了毫米波相控阵雷达的特点,介绍了电扫原理和主要毫米波电扫技术,以及相位控制扫描和多种移相器技术。针对毫米波相控阵雷达的特点,叙述了其主要应用领域,结合雷达和半导体技术对毫米波相控阵雷达的发展进行了展望。 关键词:毫米波雷达;相控阵雷达;电扫天线;移相器;数字波束形成 中图分类号:TN958.92文献标识码:A M illi m eter-W ave Phased-Array Radar and its Application Progress S H I X i ng (Southw est China I nstitute o f E lectron ic Techno l o gy,Chengdu610036,Ch i n a) Abstract:The characteristics ofM illi m eter-W ave(MMW)Phased-A rray R adar(P AR)are descri b ed, t h e pr i n ciple of electron ica ll y scanned array(ESA)and pri m ary e l e ctronically scanned techn i q ues for MMW array are presented,as w ell as phase-con tro lled scan and phase shifter techn iques.M a i n app lication fields ofMMW P AR are ill u m i n ated and its progress is antici p ated on the basis o f radar and se m iconductor techniques. Key w ords:MMW radar;phased-array radar(PAR);electr onically scanned array(ESA);phase sh ifter; dig ita l bea m for m i n g(DBF) 1概述 随着雷达技术的发展以及不同应用领域日益提高的需要,远距离和高数据率、宽带和高分辨、多目标跟踪和识别、低截获和抗干扰、多功能和高可靠已经成为现代侦察、监视以及火控等雷达的基本要求。毫米波同相控阵雷达的发展和结合应用,在多个方面适应了现代雷达发展的这些需求。 毫米波段(1~10mm)相对应的频率为30~ 300GH z,其低端毗邻厘米波段,具有厘米波段全天候的特点,高端邻接红外波段,具有红外波的高分辨力特点。毫米波雷达波束窄,角分辨力高,频带宽,隐蔽性好,抗干扰能力强,体积小,重量轻。与红外、激光设备相比较,它具有很好的穿透烟、尘、雨、雾的传播特性,具备良好的抗干扰、反隐身、反低空突防和对抗反辐射导弹(/四抗0)的能力。由于受器件功率和大气条件的影响,毫米波雷达的作用距离受到了一定限制,但这并没有妨碍毫米波雷达的广泛应用。 相控阵雷达,特别是有源相控阵雷达,具有波束扫描快、波形变化灵活、功率孔径积大、易于全固态化和轻小型化、可靠性高等特点,容易实现天线共形设计并具备低截获概率和抗干扰的优良性能。自20世纪50年代末问世以来,相控阵雷达在地基、空基、海基和天基雷达中得到广泛的应用。特别是80年代后,砷化镓(Ga A s)等半导体器件的出现极大促进了有源相控阵雷达的迅速发展,有源相控阵雷达大量取代现役的机械扫描雷达,代表了现代雷达的 #6 # *收稿日期:2007-10-18;修回日期:2007-12-28
汽车毫米波雷达项目可行性研究报告
汽车毫米波雷达项目 可行性研究报告 xxx投资公司
第一章概论 一、项目概况 (一)项目名称 汽车毫米波雷达项目 (二)项目选址 xxx经开区 项目属于相关制造行业,投资项目对其生产工艺流程、设施布置等都有较为严格的标准化要求,为了更好地发挥其经济效益并综合考虑环境等多方面的因素,根据项目选址的一般原则和项目建设地的实际情况,该项目选址应遵循以下基本原则的要求。 (三)项目用地规模 项目总用地面积25145.90平方米(折合约37.70亩)。 (四)项目用地控制指标 该工程规划建筑系数71.44%,建筑容积率1.13,建设区域绿化覆盖率7.09%,固定资产投资强度170.83万元/亩。 (五)土建工程指标 项目净用地面积25145.90平方米,建筑物基底占地面积17964.23平方米,总建筑面积28414.87平方米,其中:规划建设主体工程18303.93平方米,项目规划绿化面积2015.82平方米。
(六)设备选型方案 项目计划购置设备共计64台(套),设备购置费2430.96万元。 (七)节能分析 1、项目年用电量1064592.74千瓦时,折合130.84吨标准煤。 2、项目年总用水量4324.84立方米,折合0.37吨标准煤。 3、“汽车毫米波雷达项目投资建设项目”,年用电量1064592.74千 瓦时,年总用水量4324.84立方米,项目年综合总耗能量(当量值) 131.21吨标准煤/年。达产年综合节能量41.43吨标准煤/年,项目总节能 率25.84%,能源利用效果良好。 (八)环境保护 项目符合xxx经开区发展规划,符合xxx经开区产业结构调整规划和 国家的产业发展政策;对产生的各类污染物都采取了切实可行的治理措施,严格控制在国家规定的排放标准内,项目建设不会对区域生态环境产生明 显的影响。 (九)项目总投资及资金构成 项目预计总投资7414.97万元,其中:固定资产投资6440.29万元, 占项目总投资的86.86%;流动资金974.68万元,占项目总投资的13.14%。 (十)资金筹措 该项目现阶段投资均由企业自筹。 (十一)项目预期经济效益规划目标
雷达介绍
1.雷达的定义 雷达是对于远距离目标进行无限探测、定位、侧轨和识别的一种传感器系统。 2.最基本的雷达系统的组成 图1-1 雷达系统的基本原理 2.1 雷达发射机 雷达发射机(transmitter)的作用是产生辐射所需强度的高频脉冲信号,并将高频信号馈送到天线。 2.2 天线 天线的作用是将雷达发射机馈送来的高频脉冲信号辐射到探测空间 2.3 接收机 接收机的主要任务是把微弱的目标回波信号放大到足以进行信号处理的电平,同时接收机内部的噪声应尽量小,以保证接收机的高灵敏度。 2.4 目标检测和信息提取 目标检测和信息提取等任务是实现雷达接收机输出信号的进一步处理 3. 雷达天线 天线是雷达系统中发射和接收电磁波的装置,是雷达系统与外界联系单的纽带。他的主要作用是:(1) 将雷达发射机产生的高能量电磁波辐射(有一定的方向性)向外部自由空间(空气或其他媒介);(2) 接收目标的回波(包括外部噪声)。4. 雷达发射机
雷达发射机的作用是产生所需强度的高频脉冲信号,并将高频信号馈送到天线发射出去。常见的雷达发射机可分为单级振荡式发射机和主振放大发射机两类。 4.1 单级振荡式发射机组成 图4-1单级振荡式发射机组成框图 单级振荡式发射机,由于脉冲调制器直接控制振荡器工作,每个射频脉冲的起始射频相位是由振荡器的噪声决定,因而相继脉冲的射频相位是随机的,即受脉冲调制的振荡器所输出的射频脉冲串之间的信号相位是非相参的。所以,有时把单级振荡式发射机称为非相参发射机。 4.2主振放大发射机 主振放大式发射机由多级组成,图4-2是其基本组成框图。 图4-2 主振放大式发射机组成框图 主控振荡器用来产生射频信号;射频放大链用来放大射频信号,提高信号的功率电平;主振放大式因此而得名。主控振荡器常由基准振荡器、本机振荡器和相干振荡器等组成微波振荡器组。由于微波振荡器组常由固体器件组成,所以也称它们为固体微波源。现代雷达要求主控振荡器的输出频率很稳定。射频放大链一般由一至三级射频功率放大器级联组成。为了得到所需的雷达波形,还需要对振荡器产生的信号进行调制。 4.3 射频功率源
汽车毫米波雷达目标模拟器
一 汽车毫米波雷达目标模拟器 科电工程的毫米波雷达目标模拟器,用来验证车载76GHz和79GHz毫米波雷达的性能参数。解决毫米波雷达生成企业在研发,生成,质量控制等环节的测速,测距等性能测试需求。特别适合于整车条件下对ACC,FCW,AEB等辅助自动驾驶ADAS功能的验证和测量。同时也提供整车EMC暗室环境下的抗干扰版本。 科电MRT7681-02毫米波雷达目标模拟器 适用范围: ?ISO15622ACC自适应巡航控制系统; ?ISO15623FCW前向碰撞预警系统; ?商用车辆自动紧急制动系统(AEBS)性能要求及试验方法; ?GB/T20608自适应巡航控制系统性能要求与检测方法; ?ISO18682智能交通系统-外部危险检测与预警系统; ?ECE R131先进的紧急制动系统; ?JT/T883营运车辆行驶危险预警系统; ?ETSI EN302288短程设备;运输和交通遥感信息领域;在76GHz-77GHz范围内运行的雷达设备; ?ETSI EN302264短程设备;运输和交通遥感信息领域;在77GHz-81GHz范围内运行的雷达设备; ?GB/T36654-201876GHz 科电MTR78Pxx-T5DW角反射器(xx:20,15,10,5,0dBsm)
高精度毫米波雷达目标角反射器,可以用于雷达产线上的RCS性能标定测试;以及微波暗室内的雷达RCS性能标定测试频率范围:76GHz-81GHz;RCS雷达反射截面积精度:±0.5dBsm。 科电MDL76G-W单目标静态雷达目标模拟器 用于汽车毫米波雷达产线上雷达测距的性能标定。频率范围:76GHz-81GHz;延时距离: 1-150m±0.1。任意定制。
频率源技术前沿讲座
“频率源技术前沿讲座”心得报告 频率源是电子系统(雷达、通讯、测控、导航等)的基本信号来源,主要包括固定点频频率源和合成频率源两类。 固定点频频率源主要包括固定点频频率振荡器、固定点频锁相源和晶振倍频器等。固定点频频率振荡器在微波频段一般用于实现频率准确度要求不高的点频源。介质振荡器由于Q值高、尺寸小、易于实现混合集成,从而被较多地用来实现微波集成、低相噪、温度稳定的点频源,并可采用恒温或温补方式进一步提高频率精度。恒温压控振荡器由于温度漂移低、可直接实现高线性度超宽带调频,也得到了广泛应用。石英晶体振荡器是一种高稳定的频率源,但只能工作于几百兆赫范围内,微波频率的稳定频率源通常用石英晶体振荡器经倍频来实现,倍频可以采用锁相倍频或直接倍频。采用直接倍频方式可以获得最低的频谱近端相位噪声。随着大规模集成电路的发展,数字分频锁相电路由于附加相位噪声大幅降低、可靠性高、采用数字接口使用灵活等特点,在微波系统中得到最广泛的应用。 合成频率源又称频率合成器或频率综合器,按其构成方式可分为直接式和间接式。 直接频率合成器采用倍频器、分频器、混频器及微波开关来实现频率合成,具有最优的近端相位噪声和高速捷变频特性,但结构复杂、成本昂贵的特点限制其只能应用于雷达等高端应用领域。直接数字合成器(DDS)目前也得到了广泛应用,但高性能DDS产品的输出频率还有待提高,在微波领域其往往与锁相技术结合以混合方式实现微波频
率合成。锁相技术与直接式倍频器或DDS相结合的混合式频率合成器在提高系统性能的同时降低了直接合成方式的成本,已逐渐取代部分直接合成频率源应用在高性能频率源领域。 间接频率合成器采用锁相环(PLL)技术,目前应用最为广泛。这种合成方法使用的电路比直接式合成简单,它是通过鉴相实现相位反馈控制从而实现频率跟踪的闭环系统。模拟锁相环路附加相噪非常低,但电路复杂调试难度大。主要代表是脉冲取样锁相环路,用其制作的脉冲取样锁相介质振荡器(PDRO)可在X波段以上实现接近直接倍频相噪的小型化固定频率源,在频率低端(4GHz以下)通常使用脉冲取样锁相同轴介质腔振荡器(PCRO)以实现小型化。随着半导体技术的发展,数字分频锁相环路由于性能大幅提高、成本大幅降低且具有高的可靠性而得到最广泛应用。 锁相频率源输出信号在环路带宽内的相噪主要受参考信号、鉴相器、分频器以及分频比影响,在环路带宽以外主要取决于VCO相噪。降低相噪最重要的是降低分频比,但会降低频率分辨率,实现高的频率分辨率通常需要采用多环路设计或插入DDS合成器。选择低相噪的参考源和VCO、低基底相噪的鉴相器和分频器对降低相噪也是很重要的。环路对带内外噪声抑制特性、环路附加相位噪声等都与环路设计参数有关,因此相噪特性优化的关键是选择合适的环路带宽并合理设计环路滤波器。锁相式频综由于反馈电路固有的惰性,决定其锁定速度较慢,其锁定(频率切换)速度跟环路带宽、初始频差有关。提高频率切换速度的一般方法是增加锁相环环路带宽、采用可变增益的
参数灵活配置的通用雷达捷变频源设计
DOI:10.3969/j.issn.1672-2337.2016.04.015 参数灵活配置的通用雷达捷变频源设计 付钱华1,2,易淼3 (1.西华大学电气与电子信息学院,四川成都610039; 2.电子科技大学信息与软件工程学院,四川成都610054; 3.宜春学院物理科学与工程技术学院,江西宜春336000) 一一摘一要:设计了一种支持点频二脉内线性调频二频率捷变的雷达通用型频率源方案三利用双DDS克服了单DDS无法同时兼顾频率捷变和线性调频的缺陷,通过有效的频率规划,解决了双DDS相互干扰的问题,具有良好的相噪杂散性能,支持多普勒频移二脉内线性调频时间二带宽二斜率参数均可大范围小步进灵活配置三整个组件形成模块化,适用于扩展成不同频段二不同模式的多普勒雷达频率源及其目标模拟器,并给出了一种毫米波段扩展方案三实测结果表明,系统在725~775MHz输出带宽范围内可按照50Hz的频率步进任意设置中心频点和频率捷变范围,多普勒频移分辨率为1Hz,脉内线性调频斜率正负可设置,调频时间和带宽可在4~4000μs和100kHz~40MHz按照最小步长4ns和5Hz任意设置,捷变频时间小于890ns三关键词:雷达技术;频率合成;线性调频;频率捷变;参数可配置 中图分类号:TN91;TN957一一文献标志码:A一一文章编号:1672-2337(2016)04-0427-06 Desi g n of a General Radar Fre q uenc y S y nthesizer with Confi g urable Parameters FU Qianhua1,2,YI Miao3 (1.School o f Electrical En g ineerin g and Electronic In f ormation,Xihua Universit y,Chen g du610039,China; 2.School o f In f ormation and So f tware En g ineerin g,Universit y o f Electronic Science and Technolo g y o f China, Chen g du610054,China;3.School o f Ph y sics Science and Technolo g y,Yichun Universit y,Yichun336000,China)一一Abstract:A g eneral radar fre q uenc y s y nthesizer scheme is desi g ned in this p a p er,which su pp orts tone fre q uenc y,linear fre q uenc y modulation and fre q uenc y a g ilit y.The double DDS are used for overco-min g the defect of sin g le DDS not su pp ortin g fre q uenc y a g ilit y and linear fre q uenc y modulation at the same time.The interference p roblem was solved between the two DDS throu g h effective fre q uenc y p lan-nin g,while g ood p erformance on p hase noise and s p urious is achieved.The time,bandwidth,slo p e of linear fre q uenc y modulation and the Do pp ler fre q uenc y shift can be confi g ured flexibl y in lar g e ran g e and small ste p.The whole p art is modularized suitable for extendin g to different fre q uenc y bands and modes of the fre q uenc y s y nthesizers of Do pp ler radars and their tar g et simulators.A ex p ansion scheme of milli-meter wave band is g iven.The ex p erimental results show that the out p ut fre q uenc y ran g e is725~775 MHz,the center and ho pp in g fre q uenc y can be set b y the50Hz ste p,and the resolution of Do pp ler fre-q uenc y is1Hz.The slo p e of linear fre q uenc y modulation si g nal can be set to be p ositive or ne g ative,the time of linearl y fre q uenc y modulated can be set in the ran g e of4~4000μs,and its minimal ste p is4ns. The bandwidth of linear fre q uenc y modulation can be set in the ran g e of100kHz~40MHz,and its mini-mal ste p is5Hz,the ho pp in g time is less than890ns. Ke y words:radar technolo gy;fre q uenc y s y nthesis;LFM;fre q uenc y a g ilit y;confi g urable p arameters 0一引言 一一在现代雷达应用中,由于工作空间和时间的限制,加之快速反应能力和系统综合性的要求,雷达必须具备多功能和综合应用的能力[1]三雷达及其目标模拟器系统的激励信号二各种定时信号和具有复杂调制波形的信号均由雷达系统的频率源来完成[2],所以频率源已成为雷达系统十分关键的技术之一,其是一种复杂的多功能组件三常见的方 第4期 2016年8月一一一一一一一一一一一 雷达科学与技术 Rada r Sc i ence a nd Tec hno l og y一一一一一一一一一 Vol.14No.4 Au g ust2016 ?????????????????????????????????????????????????收稿日期:2015-09-12;修回日期:2015-11-28
毫米波雷达的详细资料介绍和其应用说明
毫米波雷达的详细资料介绍和其应用说明 所谓的毫米波是无线电波中的一段,我们把波长为1~10毫米的电磁波称毫米波,它位于微波与远红外波相交叠的波长范围,因而兼有两种波谱的特点。毫米波的理论和技术分别是微波向高频的延伸和光波向低频的发展。 所谓的毫米波雷达,就是指工作频段在毫米波频段的雷达,测距原理跟一般雷达一样,也就是把无线电波(雷达波)发出去,然后接收回波,根据收发之间的时间差测得目标的位置数据。毫米波雷达就是这个无线电波的频率是毫米波频段。 由于毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。 毫米波雷达是测量被测物体相对距离、现对速度、方位的高精度传感器,早期被应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传感器开始应用于汽车电子、无人机、智能交通等多个领域。 毫米波雷达的特性 1、频带极宽,在目前所利用的35G、94G这两个大气窗口中可利用带宽分别为16G和23G,适用与各种宽带信号处理; 2、可以在小的天线孔径下得到窄波束,方向性好,有极高的空间分辨力,跟踪精度高; 3、有较高的多普勒带宽,多普勒效应明显,具有良好的多普勒分辨力,测速精度较高; 4、地面杂波和多径效应影响小,跟踪性能好; 5、毫米波散射特性对目标形状的细节敏感,因而,可提高多目标分辨和对目标识别的能力与成像质量; 6、由于毫米波雷达以窄波束发射,具有低被截获性能,抗电子干扰性能好;