ABB机器人基本操作说明书
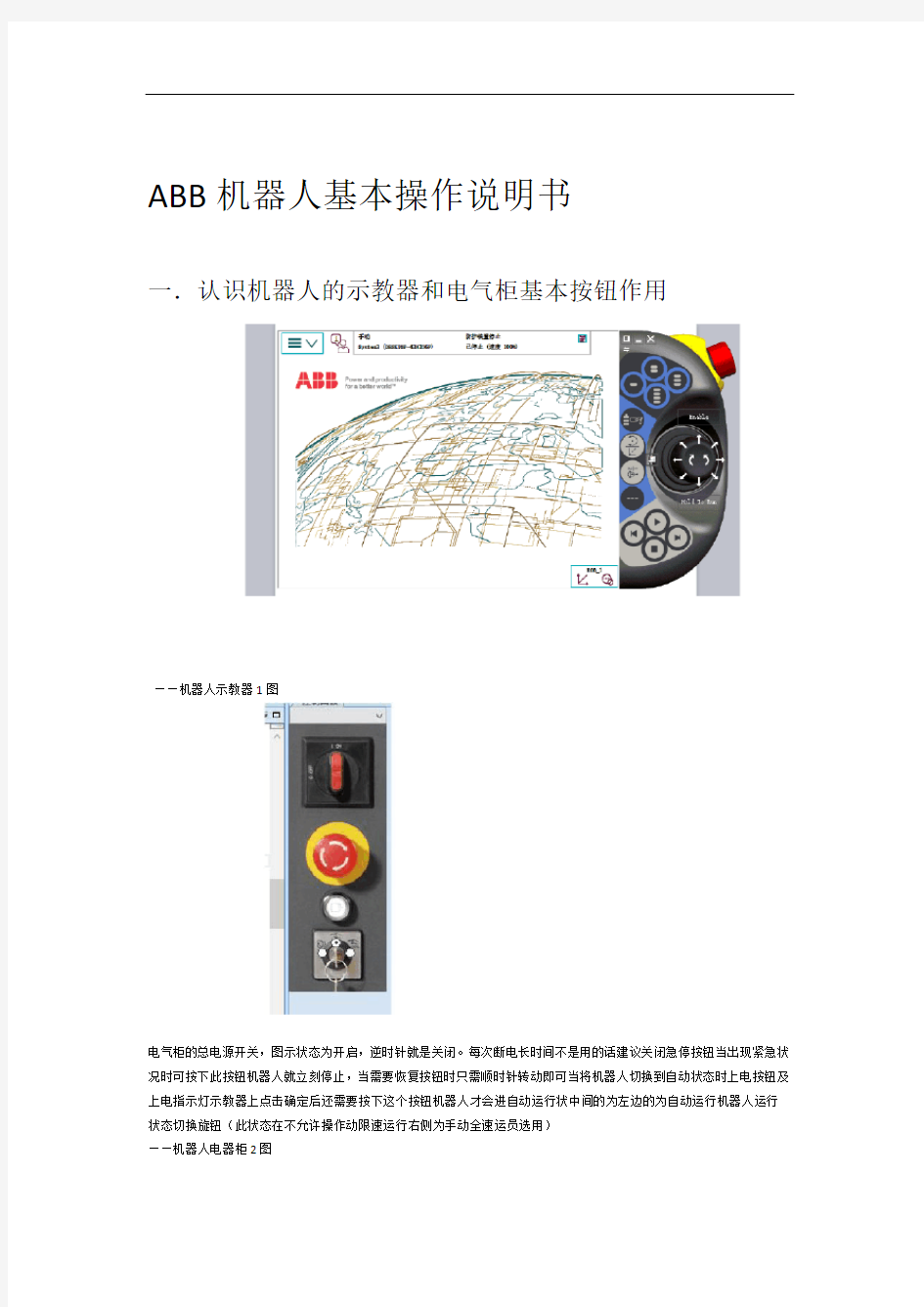
一.认识机器人的示教器和电气柜基本按钮作用
——机器人示教器1图
电气柜的总电源开关,图示状态为开启,逆时针就是关闭。每次断电长时间不是用的话建议关闭急停按钮当出现紧急状况时可按下此按钮机器人就立刻停止,当需要恢复按钮时只需顺时针转动即可当将机器人切换到自动状态时上电按钮及上电指示灯示教器上点击确定后还需要按下这个按钮机器人才会进自动运行状中间的为左边的为自动运行机器人运行状态切换旋钮(此状态在不允许操作动限速运行右侧为手动全速运员选用)
——机器人电器柜2图
——示教器上的使能按钮3 图它有三个这个示教器侧面的使能按钮是在手动示教时需要机器人动作时要一直按住的。档分别对应:不握住、适当力度握住、大力握住。其中只有在适当力度握住时才会起作用,此时电器柜上的上电指示灯会常亮,否则会是闪烁状态。
——示教器的正确握法4图
示教器界面上操作人员需要用到的几个按钮
紧急停止按钮,同示教器旋切换到线性或重定位状态(回原点必须用线性轴间来回切轴切换到单轴运动时增量开关按钮手动操作时一定要打开增手动运行程序时这些按钮分别为上一步、下步、暂停、自动运行。
5——示教器按钮界面图
右下角指示的含义
轴增量开-线性增量开13 4轴增量开-6
增量关重定位增量开增量开——示教器右下角图示6图
如何选择工具坐标工件坐标
1、打开手动操作界面如下
、点击坐标系2
、选择要用的坐标点击确认3.
如何调整增量大小和手动状态下的机器人速度1、点击下图箭头标记处2、点击箭头处设置增量大小
3、点击箭头处进行手动运行速度设置
如何进入想要调试的程序
1、打开程序编辑器
移至例行程序pp、点击调试选择2
机器人的操作流程
目录做PAYLOAD 拷贝一些宏程序 做工具坐标 焊枪的标定和初始化 通讯 配模块 设置HOME点 编程 做干涉 程序的优化 做REPAIR 做POUNCE 做修磨 填写焊接参数 试焊接 做映射 做一些注释 拷贝做好的程序
做PAYLOAD 首先把DO[193-208]的信号模拟掉,然后把ON改为OFF,再把UI删除。重起一次(FUNCTIONS——CYCLE POWER)。 然后在菜单的系统选项里面选择Motion按IDENT进入,把MASS IS KNOWN 改为YES,然后填入枪的重量。把CALBRATION MODE 改为ON。然后再按DETAIL,选择机器人的一个好的位置,MOVE TO POSITION1 和MOVE TO POSITION2,看看选的位置怎么样,DRESS的位置好不好,如果不好可以改一下位置。 把机器人打到自动,然后按APPL Y PAYLOAD,机器人自己开始PAYLOAD,机器人首先会以1%的速度配一遍然后再会以100%的速度配一遍。配好后PAYLOAD 的数值就等于枪的重量。再把改过来的DO 和UI信号改回来。 ` 拷贝宏程序 用优盘考,插上优盘,菜单选项FILE里面,选择USB,按F2,选择**,显示储存在优盘里面的程序目录,然后选择要拷贝的程序LOAD,就可以把优盘里的宏程序拷贝到机器人里面。 也可以自己创建宏程序 菜单——set up——Macro里面可以创建。 做工具坐标 做工具坐标,可以直接输入,也可以用六点法做三坐标,不过用六点法做的三坐标有误差。 直接输入法菜单——set up——FRAMES 直接填写。 六点法菜单——set up——FRAMES——METHOD——six point。 任意选择三个点,姿势不一样,但是枪头得在同一个位置。各自记录一下。 选择好一个位置比较好的点,记录。
机器人操作说明
安全 (1) 1).注意事项 (1) 2) ........................................................................................................................................................................... .以下场合不可使用机器人. (1) 3).安全操作规程 (1) 1.机器人基本操作说明 (2) 1.1 机器人显示屏说明 (3) 1.2机器人自动运行条件 (5) 1. 3 程序的创建、复制、删除 (6) 1.4 程序编辑 (11) 1.5 机器人数据备份及恢复 (18) 1.6 机器人基本设臵 (23) 1.7 报警查看 (30) 1.8 I/O 操作 (31) 1.9 码跺编辑 (33) 1.10 位臵修改 (38)
安全 1). 注意事项 1. FANUC 机器人所有者、操作者必须对自己,机器人周边人员和设备的安全负责。FANUC 不对错误使用机器人的安全问题负责。FANUC 提醒用户在使用FANUC 机器人时必须使用安全设备,必须遵守安全条款。 2. FANUC 机器人程序的设计者、机器人系统的设计和调试者、安装者必须熟悉FANUC 机器人的编程方式和系统应用及安装。 3. FANUC 机器人和其他设备有很大的不同,在于机器人可以以很高的速度移动很大的距离。 2). 以下场合不可使用机器人 1, 燃烧的环境 2. 有爆炸可能的环境 3. 无线电干扰的环境 4. 水中或其他液体中 5. 运送人或动物 6. 攀附 7. 其他 !FANUC 公司不为错误使用的机器人负责。 3).安全操作规程 3.1). 示教和手动机器人 1)禁止带手套操作示教盘和操作盘。 2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。 5)机器人周围区域必须清洁、无油,水及杂质等。 3.2). 生产运行 1)在开机运行前,须清楚了解机器人根据所编程序将要执行的全部任务。 2)必须清楚了解所有会左右机器人移动的开关、传感器和控制信号的位臵和状态。 3)必须清楚了解机器人控制器和外围控制设备上的紧急停止按钮的位臵,准备在紧急情况下使用这些按钮。 4)永远不要认为机器人没有移动其程序就已经完成。因为这时机器人有可能是在等待让它继续移动的输入信号。
机器人操作调节说明书
机器人操作调节说明 1.开启机器人电箱电源,待机器人启动完毕后将将选择开关扭至手动模式,机器人处于手动工作状态;2.程序说明: a.nWheelH1放下高度 b.nWheelH2抓取高度 c.nWheelD扫粉深度(高度) d.wobjCnv1固化线解码器(坐标) e.wobjCnv2喷粉线解码器(坐标) f.tool_Grip机器人坐标 g.phome机器人原点位置 h.pReady1机器人准备位置1 i.pcln1机器人清扫位置1 j.pReady2机器人准备位置2 k.Pick机器人抓取位置 l.pLeave机器人离开位置 m.Dplace机器人放下位置 n.rOpenGripper打开夹爪 o.rCloseGripper放开夹爪 3.机器人启动完毕,按一下左上角ABB,弹出选择目录,可进入不同控制目录; 4.选择程序调试,进入各单元程序,可手动调节及测试各单元程序及位置点; 进入程序调试后选择phome,运行程序为使机器人回原点,修改phome位置为改变原点位置; 选择TSingle为校正追踪固化线输送机及追踪喷粉线输送机,具体操作步骤为: 开启固化线输送机后单步运行程序 DeactUnit CNV1; DropWObj wobjCnv1; ActUnit CNV1; 跳步将PP移至WaitWObj wobjCnv1;时连续执行程序 待出现警报立即停止固化线输送机,停止运行程序可手动操纵机器人到固化线轮毂放下位置,修改相应位置; 再次运行一次该程序,正常后完成放下轮毂位置的设定; 关于追踪喷粉线输送机位置的步骤如上; 注意:同步感应开关位置不能变更!!! 选择ClnWheel为校正清扫位置,设定好相应位置后,修改相应位置;
FANUC机器人基本操作指导
FANUC 机器人基本操作指导
1.概论----------------------------------------------------------------------------------------------------------- 1
1)机器人的构成------------------------------------------------------------------------------------------- 1 2)机器人的用途------------------------------------------------------------------------------------------- 1 3)FANUC 机器人的型号-------------------------------------------------------------------------------- 1 2.FANUC 机器人的构成--------------------------------------------------------------------------------- 1
1)FANUC 机器人软件系统------------------------------------------------------------------------------- 1 2)FANUC 机器人硬件系统------------------------------------------------------------------------------- 2
(1). 机器人系统构成------------------------------------------------------------------------------ 2 (2). 机器人控制器硬件--------------------------------------------------------------------------- 2 3.示教盒 TP------------------------------------------------------------------------------------------------- 2 1)TP 的作用------------------------------------------------------------------------------------------------- 2 2)认识 TP 上的键------------------------------------------------------------------------------------------- 3 3)TP 上的开关---------------------------------------------------------------------------------------------- 4 4)TP 上的显示屏------------------------------------------------------------------------------------------- 5
安全操作规程
5
编程
6
1.通电和关电------------------------------------------------------------------------------------------------ 7
1)通电-------------------------------------------------------------------------------------------------------- 7
2)关电-------------------------------------------------------------------------------------------------------- 7
2.手动示教机器人----------------------------------------------------------------------------------------- 7
1)示教模式-------------------------------------------------------------------------------------------------- 7
2)设置示教速度-------------------------------------------------------------------------------------------- 8 3)示教-------------------------------------------------------------------------------------------------------- 8
3.手动执行程序--------------------------------------------------------------------------------------------- 8
4.自动运行---------------------------------------------------------------------------------------------------- 9
ABB机器人基本操作说明书书(3)
ABB机器人基本操作说明书一.认识机器人的示教器和电气柜基本按钮作用 图1——机器人示教器 图2——机器人电器柜 电气柜的总电源开关,图示状态为开启,逆时针转 就是关闭。每次断电长时间不是用的话建议关闭此 急停按钮当出现紧急状况时可按下此按钮机器人就会 立刻停止,当需要恢复按钮时只需顺时针转动即可。 上电按钮及上电指示灯,当将机器人切换到自动状态时,在示教器上点击确定后还需要按下这个按钮机器人才会进入自动运行状态 机器人运行状态切换旋钮,左边的为自动运行,中间的为手动限速运行,右侧为手动全速运行(此状态在不允许操作人员选用)。
图3——示教器上的使能按钮 这个示教器侧面的使能按钮是在手动示教时需要机器人动作时要一直按住的。它有三个档分别对应:不握住、适当力度握住、大力握住。其中只有在适当力度握住时才会起作用,此时电器柜上的上电指示灯会常亮,否则会是闪烁状态。 图4——示教器的正确握法
示教器界面上操作人员需要用到的几个按钮 图5——示教器按钮界面 右下角指示的含义 线性增量开 1-3轴增量开 4-6轴增量开 重定位增量开 增量开 增量关 图6 ——示教器右下角图示 紧急停止按钮,同图2 示教器旋钮 切换到线性或重定位状态(回原点必须用线性) 切换到单轴运动时在1-3轴和4-6轴间来回切换 增量开关按钮手动操作时一定要打开增量 手动运行程序时这些按钮分别为上一步、下一步、暂停、自动运行。
如何选择工具坐标工件坐标 1、打开手动操作界面如下 2、点击坐标系 3、选择要用的坐标点击确认
如何调整增量大小和手动状态下的机器人速度1、点击下图箭头标记处 2、点击箭头处设置增量大小
机器人操作指南
第七章工业机器人应用 一机器人示教单元使用 1.示教单元的认识 2.使用示教单元调整机器人姿势 2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。 2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:
直交调整模式TOOL调整模式
三轴直交调整模式
圆桶调整模式 2.4在手动运行模式下按“HAND”进入手爪控制界面。在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。 按键“+C”和“-C”对应“OUT-900”和“OUT-901” 按键“+B”和“-B”对应“OUT-902”和“OUT-903” 按键“+A”和“-A”对应“OUT-904”和“OUT-905” 按键“+Z”和“-Z”对应“OUT-906”和“OUT-907” 在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。 3.使用示教单元设置坐标点 3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列: J1:0.00 J5:0.00 J2: -90.00 J6:0.00 J3:170.00 J4:0.00 3.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。然后按下“F1”键进入