通信网原理实验报告Ethernet and ARP

实验一Ethernet and ARP
一、实验目的
1.加强对以太网帧格式的理解;
2.理解ARP协议的工作原理。
二、实验环境
1.PC机一台;
2.WireShark软件。
三、实验内容
1. Capturing and analyzing Ethernet frames
2. The Address Resolution Protocol
四、实验步骤及思考
(一)Capturing and analyzing Ethernet frames
HTTP GET Message
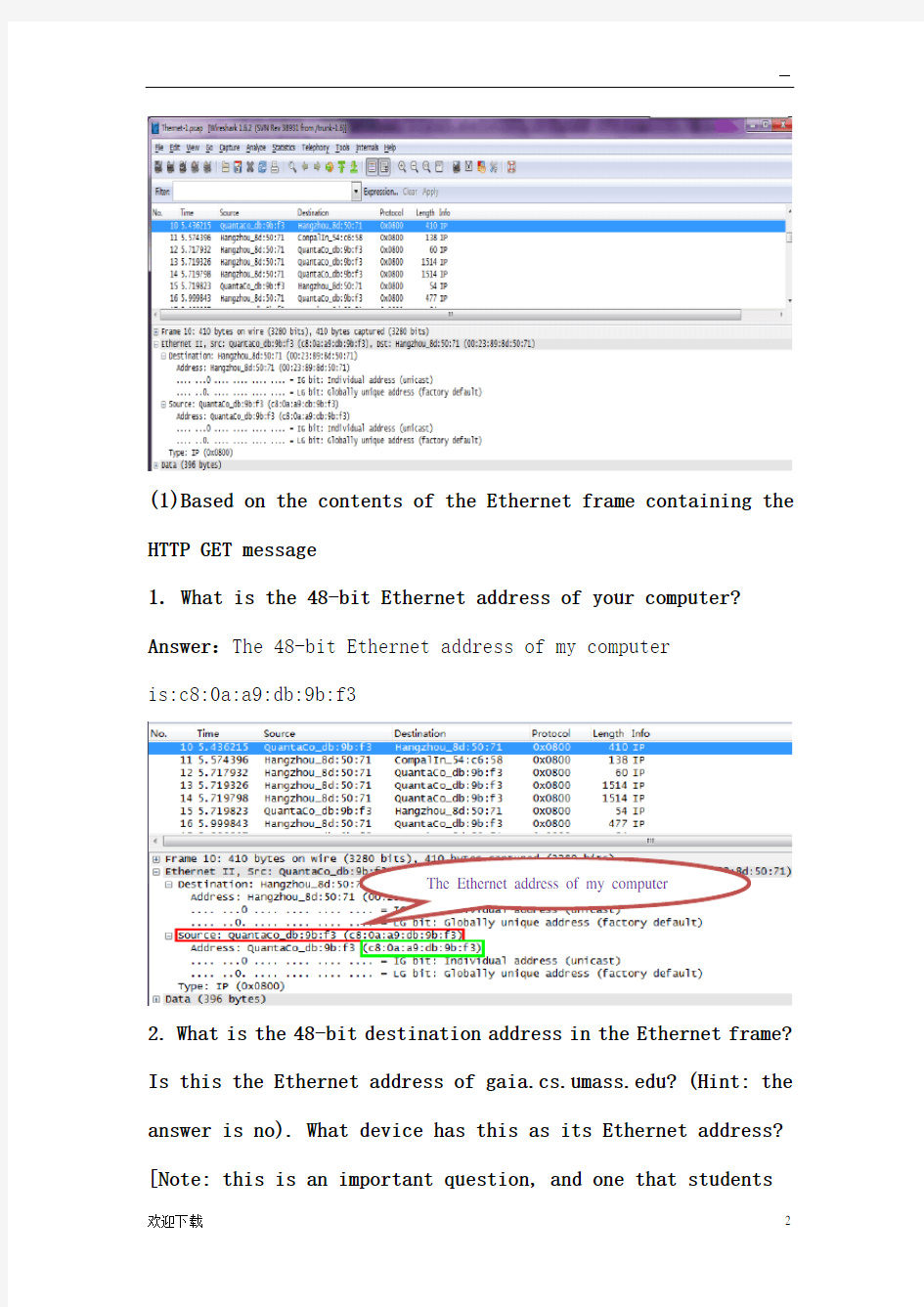
(1)Based on the contents of the Ethernet frame containing the HTTP GET message
1. What is the 48-bit Ethernet address of your computer? Answer:The 48-bit Ethernet address of my computer
is:c8:0a:a9:db:9b:f3
The Ethernet address of my computer
2. What is the 48-bit destination address in the Ethernet frame? Is this the Ethernet address of https://www.360docs.net/doc/f113819230.html,? (Hint: the answer is no). What device has this as its Ethernet address? [Note: this is an important question, and one that students
sometimes get wrong. Re-read pages 468-469 in the text and make sure you understand the answer here.]
Answer:
1)The 48-bit destination address in the Ethernet frame
is:00:23:89:8d:50:71
The destination address in the Ethernet frame
2)This is not the Ethernet address of https://www.360docs.net/doc/f113819230.html,.
3)It is the address of my Linksys router, whick is the link used to get off the subnet.
3.Give the hexadecimal value for the two-byte Frame type field. What do the bit(s) whose value is 1 mean within the flag field? Answer:
1)The hexadecimal value for the two-byte Frame type field
is:ox0800
The hexadecimal value for
the two-byte Frame type
2) The value is 1 within the flag field means the fragment has not been fragmented.
Flag
4.How many bytes from the very start of the Ethernet frame does the ASCII “G” in“GET” appear in the Ethernet frame? Answer:
1)T he ASCII “G” appears 54 bytes from the very start of the Ethernet frame.
2)Calculation process as follows:There are 14 bytes of Ethernet frame,20 bytes of IP header and 20 bytes of TCP header before HTTP data is encountered.
5. What is the hexadecimal value of the CRC field in this Ethernet frame?
Answer:
1)There is no CRC field.
2)Because the CRC calculated before the Wireshark packet sniffer start up.
(2)Based on the contents of the Ethernet frame containing the first byte of the HTTP response message
6. What is the value of the Ethernet source address? Is this the address of your computer, or of https://www.360docs.net/doc/f113819230.html, (Hint: the answer is no). What device has this as its Ethernet address? Answer:
1)The value of the Ethernet source address is: 00:23:89:8d:50:71
No CRC
HTTP response message
2)This is neither the address of your computer,northe address of https://www.360docs.net/doc/f113819230.html,.
3)It is the address of my Linksys router,which is the link used to get onto my subnet.
7. What is the destination address in the Ethernet frame? Is this the Ethernet address of your computer?
Answer:
1)The destination address in the Ethernet frame is:c8:0a:a9:db:9b:f3
2)It is the address of my computer.
(The 48-bit Ethernet address of my computer
is:c8:0a:a9:db:9b:f3)
8. Give the hexadecimal value for the two-byte Frame type field. What do the bit(s) whose value is 1 mean within the flag field? Answer:
1)The hexadecimal value for the two-byte Frame type field is: 0x0800.
2)The value is 1 within the flag field means the fragment has not been fragmented.
Flag field
9. How many bytes from the very start of the Ethernet frame does the ASCII “O” in“OK” (i.e., the HTTP response code) appear in the Ethernet frame?
Answer:
1)T he ASCII “O” appears 54 bytes from the very start of the Ethernet frame.
2)Calculation process as follows:There are 14 bytes of Ethernet frame,20 bytes of IP header and 20 bytes of TCP header before HTTP data is encountered.
10. What is the hexadecimal value of the CRC field in this Ethernet frame?
Answer:
1)There is no CRC field.
2)The reason:Because the CRC calculated before the Wireshark packet sniffer start up.
(二)The Address Resolution Protocol
(1)ARP Caching
11. Write down the contents of your computer’s ARP cache. What is the meaning of each column value?
Answer:
1)The Internet Address column contains the IP address,.
2)The Physical Address column contains the MAC address, and the type indicates the protocol type.
3)Observing ARP in action
12. What are the hexadecimal values for the source and destination addresses in the Ethernet frame containing the ARP request message?
Answer:
1)The hexadecimal values for the source addresses in the Ethernet frame containing the ARP request message is: 00:23:89:8d:50:71 2)The destination addresses in the Ethernet frame containing the ARP request message is: ff:ff:ff:ff:ff:ff
13. Give the hexadecimal value for the two-byte Ethernet Frame type field. What do the bit(s) whose value is 1 mean within the flag field?
Answer:
The hexadecimal value for the two-byte Ethernet Frame type field is:0x0806.
14.Download the ARP specification from
ftp://https://www.360docs.net/doc/f113819230.html,/innotes/std/std37.txt. A readable, detailed discussion of ARP is also at
https://www.360docs.net/doc/f113819230.html,/users/gorry/course/inet-pages/arp.h tml.
a) How many bytes from the very beginning of the Ethernet frame does the ARP opcode field begin?
Answer:The ARP opcode field begins 20 bytes from the very beginning of the Ethernet frame.
b) What is the value of the opcode field within the ARP-payload part of the Ethernet frame in which an ARP request is made? Answer:The hex value for opcode field withing the ARP-payload of the request is 1.
c) Does the ARP message contain the IP address of the sender? Answer:Yes, the ARP message containg the IP address 192.168.1.105 for the sender.
d) Where in the ARP request does the “question” appear – the Ethernet address of the machine whose corresponding IP address is being queried?
Answer:The field “Target MAC address” is set to 00:00:00:00:00:00 to question the machine whose corresponding IP address (192.168.1.105) is being queried.
15.Now find the ARP reply that was sent in response to the ARP request.
a) How many bytes from the very beginning of the Ethernet frame does the ARP opcode field begin?
Answer:The ARP opcode field begins 20 bytes from the very beginning of the Ethernet frame.
b) What is the value of the opcode field within the ARP-payload part of the Ethernet frame in which an ARP response is made? Answer:The hex value for opcode field withing the ARP-payload part of the Ethernet frame is 2.
c) Where in the ARP message does the “answer” to the earlier ARP request appear – the IP address of the machine having the Ethernet address whose corresponding IP address is being queried? Answer:The answer to the earlier ARP request appears in
the”Sender MAC address” field, which contains the Ethernet address 00:d0:59:a9:3d:68 for the sender with IP address 192.168.1.1.
16. What are the hexadecimal values for the source and destination addresses in the Ethernet frame containing the ARP reply message? Answer:The hex value for the source address is 00:06:25:da:af:73 and for the destination is 00:d0:59:a9:3d:68 .
17. Open the ethernet-ethereal-trace-1 trace file in
https://www.360docs.net/doc/f113819230.html,/wireshark-labs/wireshark-traces.zip. The first and second ARP packets in this trace correspond to an
ARP request sent by the computer running Wireshark, and the ARP reply sent to the computer running Wireshark by the computer with the ARP-requested Ethernet address. But there is yet another computer on this network, as indiated by packet 6 –another ARP request. Why is there no ARP reply (sent in response to the ARP request in packet 6) in the packet trace?
Answer:There is no reply in this trace, because we are not at the machine that sent the request. The ARP request is broadcast, but the ARP reply is sent back directly to the sender’s Ethernet address.
五、实验结论
1.CRC在WireShark中是不能被抓到的,原因是CRC在抓包之前已经被计算好。
2.ARP Request消息的Type字段值为1;ARP Replyt消息的Type 字段值为2。
3.MAC address是唯一的。
4.清空ARP缓存时(ARP –d )会出现如下的情况:
5.ARP –a 可以查看ARP缓存中的内容。
六、实验总结
通过这次实验,我对ARP协议有了进一步的理解,在实验过程中遇到了许多问题,但经过查阅资料并和学姐交流,最终解决了这些问
题,以实验的方式验证课本上的理论知识,学习也变得更有意义。
北邮 通信网实验报告
北京邮电大学实验报告通信网理论基础实验报告 学院:信息与通信工程学院 班级:2013211124 学号: 姓名:
实验一 ErlangB公式计算器 一实验内容 编写Erlang B公式的图形界面计算器,实现给定任意两个变量求解第三个变量的功能: 1)给定到达的呼叫量a和中继线的数目s,求解系统的时间阻塞率B; 2)给定系统的时间阻塞率的要求B和到达的呼叫量a,求解中继线的数目s,以实现网络规划; 3)给定系统的时间阻塞率要求B以及中继线的数目s,判断该系统能支持的最大的呼叫量a。 二实验描述 1 实验思路 使用MA TLAB GUITOOL设计图形界面,通过单选按钮确定计算的变量,同时通过可编辑文本框输入其他两个已知变量的值,对于不同的变量,通过调用相应的函数进行求解并显示最终的结果。 2程序界面 3流程图 4主要的函数 符号规定如下: b(Blocking):阻塞率; a(BHT):到达呼叫量;
s(Lines):中继线数量。 1)已知到达呼叫量a及中继线数量s求阻塞率b 使用迭代算法提高程序效率 B s,a= a?B s?1,a s+a?B(s?1,a) 代码如下: function b = ErlangB_b(a,s) b =1; for i =1:s b = a * b /(i + a * b); end end 2)已知到达呼叫量a及阻塞率b求中继线数量s 考虑到s为正整数,因此采用数值逼近的方法。采用循环的方式,在每次循环中增加s的值,同时调用B s,a函数计算阻塞率并与已知阻塞率比较,当本次误差小于上次误差时,结束循环,得到s值。 代码如下: function s = ErlangB_s(a,b) s =1; Bs = ErlangB_b(a,s); err = abs(b-Bs); err_s = err; while(err_s <= err) err = err_s; s = s +1; Bs = ErlangB_b(a,s); err_s = abs(b - Bs); end s = s -1; end 3)已知阻塞率b及中继线数量s求到达呼叫量a 考虑到a为有理数,因此采用变步长逼近的方法。采用循环的方式,在每次循环中增加a的值(步长为s/2),同时调用B s,a函数计算阻塞率并与已知阻塞率比较,当本次误差小于预设阈值时,结束循环,得到a值。 代码如下: function a = ErlangB_a(b,s)
机械原理习题及解答
机构的结构分析 2-1填充题及简答题 (1)平面运动副的最大约束数为,最小约束数为。 (2)平面机构中若引入一高副将带入个约束,而引入一个低副将带入个约束。 (3)机构具有确定运动的条件是什么? (4)何谓复合铰链、局部自由度和虚约束? (5)杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构级别有无影响? 答案: (1)平面运动副的最大约束数为2,最小约束数为1 (2)平面机构中若引入一高副将带入1个约束,而引入一个低副将带入2个约束。 (3)机构具有确定运动的条件是:机构的自由度大于零,且自由度数等于原动件数。 (4)复合铰链:在同一点形成两个以上的转动副,这一点为复合铰链。 局部自由度:某个构件的局部运动对输出构件的运动没有影响,这个局部运动的自由度叫局部自由度。 虚约束:起不到真正的约束作用,所引起的约束是虚的、假的。 (5)杆组是自由度为零、不可再拆的运动链。机构的级别是所含杆组的最高级别。选择不 同的原动件使得机构中所含杆组发生变化,可能会导致机构的级别发生变化。 2-2 计算下图机构的自由度,若含有复合铰链,局部自由度,虚约束等情况时必须一一指出, 图中BC、ED、FG分别平行且相等。要使机构有确定运动,请在图上标出原动件。 2-2答案:B点为复合铰链,滚子绕B点的转动为局部自由度,ED及其两个转动副引入虚 约束,I、J两个移动副只能算一个。
11826323=-?-?=--=h L p p n F 根据机构具有确定运动的条件,自由度数等于原动件数,故给凸轮为原动件。 2-3 题图2-3所示为一内燃机的机构简图,试计算其自由度,以AB 为原动件分析组成此机 构的基本杆组。又如在该机构中改选EF 为原动件,试问组成此机构的基本杆组是否与前有所不同,机构的级别怎样? 2-3答案:110273=?-?=F 。注意其中的C 、F 、D 、H点并不是复合铰链。 以AB 为原动件时: 此时,机构由三个Ⅱ级基本杆组与原动件、机架构成,机构的级别为二级。 以EF 为原动件时: 机构由1个Ⅱ级基本杆组,1个Ⅲ级基本杆组和机架组成。机构的级别为三级。显然,取不同构件为原动件,机构中所含的杆组发生了变化,此题中,机构的级别也发生了变化。 2-4 图示为一机构的初拟设计方案。试分析:
机械设计实验报告
前言 一、实验课目的 本课程实验课目的在于:验证、巩固和加深课堂讲授的基本理论,加强理论联系实际及独立工作能力的培养;掌握一些最基本的机械实验方法、测量技能及用实验法来测定一些机械参数的能力;以及培养学生踏实细致、严肃认真的科学作风。因此,实验课是一个不可缺少的重要环节,每个学生必须认真对待,在课前进行预习,在课后分析试验结果,写成正规的实验报告。实验课为评定学生成绩的一部分。 二、实验前的准备工作 为了保证实验顺利进行,要求在实验前做好准备工作,教师在实验前要进行检查和提问,如发现有不合格者,提出批评,甚至停止实验的进行,实验准备工作包括下列几方面内容: 1.预习好实验指导书:明确实验的目的及要求;搞懂实验的原理;了解实验进行的步骤及主要事项,做到心中有底。 2.准备好实验指导书中规定自带的工具、纸张。 3.准备好实验数据记录表格。表格应记录些什么数据自拟。 三、遵守实验室的规章制度 1.验前必须了解实验设备、仪器的使用性能、操作规程及使用须知,否则不得操作。 2.严格按照规定,精心操作设备、仪器。 3.实验室内与本实验无关的设备与仪器,一律不得乱动。 4.在实验室严守纪律,不得高声谈笑,保持室内整洁。 5.实验完毕后,用过设备、仪器放回原处,并整理清洁、经教师同意后才得离开。 四、实验报告 实验报告是对实验所有数据、现象进行整理,分析得出一定结论与看法的书面文件。学生在实验后必须按照要求,整理并分析处理所的结果,写成正规的实验报告。 为了写好实验报告,提出以下几点: 1.实验结果记录应经实验指导教师过目签字,并随实验报告一起交上。 2.报告中的结果分析及讨论应力求具体,应针对试验具体情况,防止不切实际的空谈。 3.实验报告要求每人一份。 4.实验报告应在实验完毕后一星期内,由班委汇集交老师。 吉林大学珠海学院 机械工程学院 2018年9月10日
宽带通信网综合实验报告
《宽带通信网综合实验报告》 组员:XX 组员:XX 学院:通信工程学院
FTTx实验 【实验步骤和结果】 1、根据图13所示,搭建系统,其中三台ONU接计算机终端,还有一台ONU 接IPTV机顶盒。用ping命令检查接入系统是否可以连通?如果不能连通,请分析原因。如果可以连通,使用tracert命令检查路由,并给出HTTx的路由信息。 图1(ping) 图2(tracert) 2、用ipconfig检查接入终端的IP地址和网关,记录下来,并与LAN接入的地 址相比较,它们有什么不同?原因是什么? 经比较发现,两个地址的网段不同。
图3为ipconfig命令 图4为LAN接入地址 3、用telnet远程登录R4101路由器,记录有关光接口的配置信息。 ESR实验 【实验步骤和结果】 1、搭建系统,将三台S2016交换机组成一个ESR环,确定主节点为S2016(1),从节点 为S2016(2)和S2016(3)。
(1)先配置主交换机: (2)进入ESR配置模式,并将该交换机配置成主站: (3)置ESR环所用接口和VLAN,并使能该ESR: (4)配置从交换机: 先对S2016(2)进行配置:
步骤同上,对S2016(3)进行相同配置。 (5)使用ping 192.168.6.254命令查看网络,网络连通成功。 3、人为切断ESR环路,由于前面对主、从交换机的成功配置,使得ESR域的master node 控制其第二接口的阻塞实现了保护倒换功能。系统正常运行。
WLAN实验 【实验步骤和结果】 1、按照上面介绍的无线AP和连接计算机的配置方法进行配置,配置完成后, 用无线网卡接入(注意输入密钥),连接后,使用ping 192.168.0.1命令查看网络是否连通?如果网络连通,使用ipconfig命令查看连接计算机的IP地址、网关以及DNS,记录相关信息。使用tracert 192.168.0.1命令查看路由,并分析该路由。 图1 (配置界面图)
通信原理实验报告
中南大学 数字通信原理 实验报告 课程名称:数字通信原理实验 班级: 学号: 姓名: 指导教师:
实验一数字基带信号 一、实验目的 1、了解单极性码、双极性码、归零码、不归零码等基带信号波形特点。 2、掌握AMI、HDB3码的编码规则。 3、掌握从HDB3码信号中提取位同步信号的方法。 4、掌握集中插入帧同步码时分复用信号的帧结构特点。 5、了解HDB3(AMI)编译码集成电路CD22103。 二、实验内容 1、用示波器观察单极性非归零码(NRZ)、传号交替反转码(AMI)、三阶高密度双极性码(HDB3)、整流后的AMI码及整流后的HDB3码。 2、用示波器观察从HDB3码中和从AMI码中提取位同步信号的电路中有关波形。 3、用示波器观察HDB3、AMI译码输出波形。 三、实验步骤 本实验使用数字信源单元和HDB3编译码单元。 1、熟悉数字信源单元和HDB3编译码单元的工作原理。接好电源线,打开电源开关。 2、用示波器观察数字信源单元上的各种信号波形。 用信源单元的FS作为示波器的外同步信号,示波器探头的地端接在实验板任何位置的GND点均可,进行下列观察: (1)示波器的两个通道探头分别接信源单元的NRZ-OUT和BS-OUT,对照发光二极管的发光状态,判断数字信源单元是否已正常工作(1码对应的发光管亮,0码对应的发光管熄); (2)用开关K1产生代码×1110010(×为任意代码,1110010为7位帧同步码),K2、K3产生任意信息代码,观察本实验给定的集中插入帧同步码时分复用信号帧结构,和NRZ 码特点。 3、用示波器观察HDB3编译单元的各种波形。 仍用信源单元的FS信号作为示波器的外同步信号。 (1)示波器的两个探头CH1和CH2分别接信源单元的NRZ-OUT和HDB3单元的AMI-HDB3,将信源单元的K1、K2、K3每一位都置1,观察全1码对应的AMI码(开关K4置于左方AMI 端)波形和HDB3码(开关K4置于右方HDB3端)波形。再将K1、K2、K3置为全0,观察全0码对应的AMI码和HDB3码。观察时应注意AMI、HDB3码的码元都是占空比为0.5的双极性归零矩形脉冲。编码输出AMI-HDB3比信源输入NRZ-OUT延迟了4个码元。
机械原理实验
实验四机构运动简图测绘 一、实验目的 1.对运动副、零件、构件及机构等概念建立实感。 2.培养依照实物机械绘制其机构运动简图的能力。 3.熟悉机构自由度的计算方法。 二、实验设备及用具 1.牛头刨床模型,抛光机模型等各种机构模型 2.学生自备:圆规、分规、有刻度的三角板(或直尺)、铅笔、橡皮及草稿纸等。 三、实验要求 实验前必须认真预习实验指导书和阅读教材中的有关章节,熟悉绘制机构运动简图的基本要求,掌握机构自由度的计算方法。实验时根据给出的机构模型,仔细观察和分析后,正确绘制机构运动简图。要求每位同学画出3~4个机构运动简图,并计算机构自由度,把计算结果与实际机构进行比较,验证其有无错误。 四、基本原理 机构的运动与机构中构件的数目、运动副的类型、数目及运动副的相对位置有关,而与构件的外形、组成构件的零件数目及固联方式、运动副的具体结构等无关。因此,在绘制机构运动简图时,可以撇开构件的复杂外形和运动副的具体构造,而用简单的符号来代替构件和运动副,并按一定的比例尺表示各运动副的相对位置,即可表明机构中运动传递的情况。 五、绘制机构运动简图的方法 1.了解要绘制的机械的名称及功用,认清机械的原动件及工作构件(执行机构)。 2.缓慢转动原动件,细心观察运动在构件间的传递情况,了解活动构件,运动副的数目及其性质。 在了解活动构件及运动副数时,要注意到如下两种情况: 1.当两构件间的相对运动很小时,易误认作为一个构件; 2.由于制造的不精确,同一构件各部分之间有稍许松动时,易误认作为两个构件,碰到这种情况,要仔细分析,正确判断。 3.要选择最能表示机构特征的平面为视图平面;同时,要将原动件放在一适当的位置,以使机构运动简图最为清晰。
通信网络实验报告
实验一隐终端和暴露终端问题分析 一、实验目的 结合仿真实验分析载波检测无线网络中的隐终端问题和暴露终端问题。 二、实验设定与结果 基本参数配置:仿真时长100s;随机数种子1;仿真区域2000x2000;节点数4。 节点位置配置:本实验用[1] 、[2]、[3] 、[4]共两对节点验证隐终端问题。节点[1]、[2]距离为200m,节点[3]、[4]距离为200m,节点[2]、[3]距离为370m。 1234 业务流配置:业务类型为恒定比特流CBR。[1]给[2]发,发包间隔为0.01s,发包大小为512bytes;[3]给[4]发,发包间隔为0.01s,发包大小为512bytes。 实验结果: Node: 1, Layer: AppCbrClient, (0) Server address: 2 Node: 1, Layer: AppCbrClient, (0) Total number of bytes sent: 5120000 Node: 1, Layer: AppCbrClient, (0) Total number of packets sent: 10000 Node: 2, Layer: AppCbrServer, (0) Client address: 1 Node: 2, Layer: AppCbrServer, (0) Total number of bytes received: 4975616 Node: 2, Layer: AppCbrServer, (0) Total number of packets received: 9718 Node: 3, Layer: AppCbrClient, (0) Server address: 4 Node: 3, Layer: AppCbrClient, (0) Total number of bytes sent: 5120000 Node: 3, Layer: AppCbrClient, (0) Total number of packets sent: 10000 Node: 4, Layer: AppCbrServer, (0) Client address: 3 Node: 4, Layer: AppCbrServer, (0) Total number of bytes received: 5120000 Node: 4, Layer: AppCbrServer, (0) Total number of packets received: 10000 结果分析 通过仿真结果可以看出,节点[2]无法收到数据。由于节点[3]是节点[1]的一个隐终端,节点[1]无法通过物理载波检测侦听到节点[3]的发送,且节点[3]在节点[2]的传输范围外,节点[3]无法通过虚拟载波检测延迟发送,所以在节点[1]传输数据的过程中,节点[3]完成退避发送时将引起冲突。 三、课后思考 1、RTS/CTS能完全解决隐终端问题吗?如果不能,请说明理由。 答:能。对于隐发送终端问题,[2]和[3]使用控制报文进行握手(RTS-CTS),听到回应握手信号的[3]知道自己是隐终端,便能延迟发送;对于隐接受终端问题,在多信道的情况下,[3]给[4]回送CTS告诉[4]它是隐终端,现在不能发送报文,以避免[4]收不到[3]的应答而超时重发浪费带宽。
通信原理实验报告
实验一、PCM编译码实验 实验步骤 1. 准备工作:加电后,将交换模块中的跳线开关KQ01置于左端PCM编码位置,此时MC145540工作在PCM编码状态。 2. PCM串行接口时序观察 (1)输出时钟和帧同步时隙信号观测:用示波器同时观测抽样时钟信号(TP504)和输出时钟信号(TP503),观测时以TP504做同步。分析和掌握PCM编码抽样时钟信号与输出时钟的对应关系(同步沿、脉冲宽度等)。 (2)抽样时钟信号与PCM编码数据测量:用示波器同时观测抽样时钟信号(TP504)和编码输出数据信号端口(TP502),观测时以TP504做同步。分析和掌握PCM编码输出数据与抽样时钟信号(同步沿、脉冲宽度)及输出时钟的对应关系。 3. PCM编码器 (1)方法一: (A)准备:将跳线开关K501设置在测试位置,跳线开关K001置于右端选择外部信号,用函数信号发生器产生一个频率为1000Hz、电平为2Vp-p的正弦波测试信号送入信号测试端口J005和J006(地)。 (B)用示波器同时观测抽样时钟信号(TP504)和编码输出数据信号端口(TP502),观测时以TP504做同步。分析和掌握PCM编码输出数据与抽样时钟信号(同步沿、脉冲宽度)及输出时钟的对应关系。分析为什么采用一般的示波器不能进行有效的观察。 (2)方法二: (A)准备:将输入信号选择开关K501设置在测试位置,将交换模块内测试信号选择开关K001设置在内部测试信号(左端)。此时由该模块产生一个1KHz的测试信号,送入PCM编码器。(B)用示波器同时观测抽样时钟信号(TP504)和编码输出数据信号端口(TP502),观测时以内部测试信号(TP501)做同步(注意:需三通道观察)。分析和掌握PCM编码输出数据与帧同步时隙信号、发送时钟的对应关系。 4. PCM译码器 (1)准备:跳线开关K501设置在测试位置、K504设置在正常位置,K001置于右端选择外部信号。此时将PCM输出编码数据直接送入本地译码器,构成自环。用函数信号发生器产生一个频率为1000Hz、电平为2Vp-p的正弦波测试信号送入信号测试端口J005和J006(地)。 (2) PCM译码器输出模拟信号观测:用示波器同时观测解码器输出信号端(TP506)和编码器输入信号端口(TP501),观测信号时以TP501做同步。定性的观测解码信号与输入信号的关系:质量、电平、延时。 5. PCM频率响应测量:将测试信号电平固定在2Vp-p,调整测试信号频率,定性的观测解码恢复出的模拟信号电平。观测输出信号信电平相对变化随输入信号频率变化的相对关系。
机械原理实验报告
机械原理实验指导 实验一 机构运动简图的测绘 一、 实验目的 1.掌握根据各种机构实物或模型绘制机构运动简图的方法; 2.验证机构自由度的计算公式; 3.分析某些四杆机构的演化过程。 二、 实验设备和工具 1.各类机构的模型和实物; 2.钢板尺、量角器、内外卡钳等; 3.三角尺、铅笔、橡皮、草稿纸等(自备)。 三、 实验原理 由于机构的运动仅与机构中构件的数目和构件所组成的运动副数目、类型和相对位置有关。因此,可以撇开构件的实际外形和运动副的具体构造,用简单的线条来表示构件,用规定的或惯用的符号来表示运动副,并按一定的比例画出运动副的相对位置,这种简单的图形即为机构运动简图。 四、 实验步骤 1.使被测机构缓慢运动,从原动件开始,循着传动路线观察机构的运动,分清各个运动单元,确定组成机构的构件数目; 2.根据直接相联接两构件的接触情况及相对运动性质,确定运动副的种类; 3.选择能清楚表达各构件相互关系的投影面,从原动件开始,按传动路线用规定的符号,以目测的比例画出机构运动示意图,再仔细测量与机构有关的尺寸,按确定的比例再画出机构运动简图,用数字1、2、3……分别标注各构件,用字母A 、B 、C ……分别标注各运动副; 比例尺) (构件在图纸上的长度 ) (构件实际长度mm AB cm L AB L = μ 4.分析机构运动的确定性,计算机构运动的自由度。
五、思考题 1.一张正确的机构运动简图应包括哪些内容? 2.绘制机构运动简图时,原动件的位置能否任意选择?是否会影响简图的正确性? 3.机构自由度的计算对测绘机构运动简图有何帮助? 六、实验报告
实验二 渐开线齿轮的范成原理 一、 实验目的 1.掌握用范成法加工渐开线齿轮齿廓曲线的原理; 2.了解齿廓产生根切现象的原因及避免根切的方法; 3.了解刀具径向变位对齿轮的齿形和几何尺寸的影响。 二、 实验设备和工具 1.齿轮范成仪; 2.剪刀、绘图仪; 3.圆规、三角尺、两种颜色的铅笔或圆珠笔(自备)。 三、 实验原理 范成法是利用齿轮啮合时其共轭齿廓互为包络线的原理来加工齿轮的一种方法。加工时,其中一轮为刀具,另一轮为轮坯。他们之间保持固定的角速度比传动,好象一对真正的齿轮啮合传动一样,同时刀具还沿轮坯的轴向作切削运动,这样制得的齿轮齿廓就是刀具的刀刃在各个位置的包络线。为了能清楚地看到包络线的形成,我们用范成仪来模拟实现齿轮轮坯与刀具间的传动“切削”过程。 齿轮范成仪构造如图2——1所示,半圆盘2绕固定于机架上的轴心转动,在圆盘的周缘刻有凹槽,凹槽内嵌有两条钢丝3,钢丝绕在凹槽内,其中心线形成的圆相当于被加工齿轮的分度圆。两条钢丝的一端固定在圆盘2上的B 、B ‘ 点,另一端固定在拖板4的A 、A ’ 点,拖板可水平方向移动,这与被加工齿轮相对齿条刀具的运动方向相同。 在拖板4上还装有带有刀具的小拖板5,转动螺钉7可以调节刀具中线至轮坯中心的距离。 齿轮范成仪中,已知基本参数为: 1. 齿条刀具:压力角0 20=α,模数mm m 25=, 齿顶高系数0.1* =a h ,径向间隙系数25.0* =C 2. 被加工齿轮:分度圆直径mm d 200= 四、 实验步骤 1.根据已知基本参数分别计算被加工齿轮的基圆直径d b 、最小变位系数x min ,标准齿轮和变位齿轮的齿顶圆直径d a1和d a2、齿根圆直径d f1和d f2,将上述六个圆
通信原理实验报告
实验一常用信号的表示 【实验目的】 掌握使用MATLAB的信号工具箱来表示常用信号的方法。 【实验环境】 装有MATLAB6.5或以上版本的PC机。 【实验内容】 1. 周期性方波信号square 调用格式:x=square(t,duty) 功能:产生一个周期为2π、幅度为1 ±的周期性方波信号。其中duty表示占空比,即在信号的一个周期中正值所占的百分比。 例1:产生频率为40Hz,占空比分别为25%、50%、75%的周期性方波。如图1-1所示。 clear; % 清空工作空间内的变量 td=1/100000; t=0:td:1; x1=square(2*pi*40*t,25); x2=square(2*pi*40*t,50); x3=square(2*pi*40*t,75); % 信号函数的调用subplot(311); % 设置3行1列的作图区,并在第1区作图plot(t,x1); title('占空比25%'); axis([0 0.2 -1.5 1.5]); % 限定坐标轴的范围 subplot(312); plot(t,x2); title('占空比50%'); axis([0 0.2 -1.5 1.5]); subplot(313); plot(t,x3); title('占空比75%'); axis([0 0.2 -1.5 1.5]);
图1-1 周期性方波 2. 非周期性矩形脉冲信号rectpuls 调用格式:x=rectpuls(t,width) 功能:产生一个幅度为1、宽度为width、以t=0为中心左右对称的矩形波信号。该函数横坐标范围同向量t决定,其矩形波形是以t=0为中心向左右各展开width/2的范围。Width 的默认值为1。 例2:生成幅度为2,宽度T=4、中心在t=0的矩形波x(t)以及x(t-T/2)。如图1-2所示。 t=-4:0.0001:4; T=4; % 设置信号宽度 x1=2*rectpuls(t,T); % 信号函数调用 subplot(121); plot(t,x1); title('x(t)'); axis([-4 6 0 2.2]); x2=2*rectpuls(t-T/2,T); % 信号函数调用
机械原理实验报告-齿轮传动
机械原理实验报告-齿轮传动 机械原理实验 ——齿轮传动机构 groups, Wujiang County. In September, the chapter in the Tomb occupied formally established the village of KMT: Wu Jiang County Government (known as "guerrilla Government") and against self-defence groups. Begins to flow from jiaxing railway Lili, Tan Hills area. In November, the County Government is based on the tomb of Lu Xiyan, mine-and from the pier at Dang, under Jin bang. County Government operates three Civil Affairs, finance, education 一( 实验目的 1. 掌握齿轮的相关几何参数的定义及其意义。 2. 了解齿轮传动的构成,认识其组成原件。 3. 掌握齿轮传动比的计算方法。 4. 掌握齿轮的相关几何参数的计算。 5. 训练动手能力,培养综合设计的能力。二( 实验仪器 序号名称数量备注 1 1 试验台机架 2 1 主动轴带轮 3 1 电机轴带轮 4 2 主轴
5 3 端盖 6 2 卡环 三( 实验原理 (一)齿轮参数 groups, Wujiang County. In September, the chapter in the Tomb occupied formally established the village of KMT: Wu Jiang County Government (known as "guerrilla Government") and against self-defence groups. Begins to flow from jiaxing railway Lili, Tan Hills area. In
网络与数据通信实验报告
网络与数据通信实验报告 指导老师:李艳 姓名:胡嘉懿(1110200302) 周敏(1110200311)
实验1 网络协议分析Ethereal 1.ARP帧解析 ·帧1(线路上传输60字节,俘获60字节) 到达时间:2004年5月7日00:35:13.802398000 与上一帧的时间差:0.000000000秒 与第一帧的时间差:0.000000000秒 帧序号:1 数据包长度:60字节 俘获长度:60字节 ·以太网Ⅱ,源地址:00:0d:87:f8:4c:f9,目的地址:ff:ff:ff:ff:ff:ff(MAC地址) 目的地址:ff:ff:ff:ff:ff:ff(广播) 源地址:00:0d:87:f8:4c:f9(192.168.0.44) 类型:地址转换协议ARP(Ox0806) 尾部:000000000
·地址转换协议 ·硬件类型(Hardware type):16位,定义ARP实现在何种类型的网络上,以太网的硬件类型值为Ox0001,图中为以太网Ox0001 ·协议类型(Protocol type):16位,定义使用ARP/RARP的协议类型,IPv4类型值为Ox0800,图中为IP Ox0800 ·硬件地址长度(Hardware size):1字节,以字节为单位定义物理地址的长度,图中为6 ·协议地址长度(Protocol size):1字节,以字节为单位定义协议地址的长度,图中为4 ·操作类型(Opcode):16位,定义报文类型,1为ARP请求,2为ARP应答,3为RARP 请求,4为RARP应答,图中为请求(Ox0001) ·发送方MAC地址(Sender MAC address):6字节,发送方的MAC地址,图中为00:0d:87:f8:4c:f9 ·发送方IP地址(Sender IP address):4字节,发送方的IP地址,RARP请求中不填此字段图中为192.168.0.44 ·目的MAC地址(Target MAC address):6字节,ARP请求中不填此字段(待解析),图中为00:00:00:00:00:00 ·目的协议地址(Target IP address):4字节,长度取决于协议地址长度,长度一共28字节,图中为192.168.80.1
通信原理实验报告
通信原理实验报告 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
实验一常用信号的表示 【实验目的】 掌握使用MATLAB的信号工具箱来表示常用信号的方法。 【实验环境】 装有或以上版本的PC机。 【实验内容】 1. 周期性方波信号square 调用格式:x=square(t,duty) 功能:产生一个周期为2π、幅度为1±的周期性方波信号。其中duty表示占空比,即在信号的一个周期中正值所占的百分比。 例1:产生频率为40Hz,占空比分别为25%、50%、75%的周期性方波。如图1-1所示。 clear; % 清空工作空间内的变量 td=1/100000; t=0:td:1; x1=square(2*pi*40*t,25); x2=square(2*pi*40*t,50); x3=square(2*pi*40*t,75); % 信号函数的调用 subplot(311); % 设置3行1列的作图区,并在第1区作图 plot(t,x1); title('占空比25%'); axis([0 ]); % 限定坐标轴的范围 subplot(312); plot(t,x2); title('占空比50%'); axis([0 ]); subplot(313); plot(t,x3);
title('占空比75%'); axis([0 ]); 图1-1 周期性方波 2. 非周期性矩形脉冲信号rectpuls 调用格式:x=rectpuls(t,width) 功能:产生一个幅度为1、宽度为width、以t=0为中心左右对称的矩形波信号。该函数横坐标范围同向量t决定,其矩形波形是以t=0为中心向左右各展开width/2的范围。Width 的默认值为1。 例2:生成幅度为2,宽度T=4、中心在t=0的矩形波x(t)以及x(t-T/2)。如图1-2所示。 t=-4::4; T=4; % 设置信号宽度x1=2*rectpuls(t,T); % 信号函数调用 subplot(121); plot(t,x1);
机械原理实验思考题参考
《机构测绘、分析及设计》实验思考题参考答案 1.一个正确的“机构运动简图”应能说明哪些内容? 机构运动简图应着重表达机构各构件间的相对运动关系,应包括原动件的运动规律、机构中所有构件和运动副的类型、数目及其相对位置(即转动副的中心位置、移动副的中心线位置和高副接触点的位置),而与构件的外形、断面尺寸、组成构件的零件数目及其固联方式和运动副的具体结构无关。因此绘制机构运动简图可以撇开构件的复杂外形和运动副的具体构造,用简单的线条和规定的符号代表构件和运动副,并按比例定出各运动副的相对位置。 2.根据所装配的曲柄滑块机构,分析此机构中曲柄存在条件是什么?连杆长度与机构传力性能之间有什么关联? 曲柄滑块机构中曲柄存在条件是: L AB +e<=L BC 连杆长度越长则机构传力性能越好,因为连杆越长则压力角越小。 3.牛头刨六杆机构中滑杆的行程长度如何调整?调整曲柄长度 4.曲柄滑块机构、曲柄摇块机构、摆动导杆机构之间的演化关系如何?举例说明机构演化的方法有哪些? 铰链四杆机构可以通过四种方式演化出其它形式的四杆机构。即①取不同构件为机架;②转动副变移动副;③杆状构件与块状构件互换;④销钉扩大。 曲柄滑块机构曲柄摇块机构摆动导杆机构
曲柄滑块机构、曲柄摇块机构、摆动导杆机构之间通过取不同构件为机架来演化。 对心曲柄滑块机构偏心轮滑块机构 牛头刨六杆机构正弦机 构曲柄摇杆机构 《平面机构特性分析》实验思考题参考答案 1、铰链四杆机构(L1=50 mm,L2=100 mm,L3=80 mm)中,通过改变机架长度可得到何种机构? 设四杆机构中机架L4<=50,L4=L min,则由曲柄存在条件:最短杆与最长杆的长度之和必须小于或等于其余二杆的长度之和(L max+L min<=L2+L3)可得: 100+L4<=50+80 即0
机械原理实验报告
机械原理实验报告 姓名: 班级: 学号: 日期: 现代机械设计教研室 河南机电高等专科学校
机构现场认识实验报告 一、平面连杆机构 1.根据机构中移动副数目的不同,平面四杆机构可分为、、三种类型。 2.根据连架杆是否能整周转动,平面铰链四杆机可分为、 、。 3.在平面四杆机构中,由主动件的转动转换为从动件的移动的机构有、。 二、凸轮机构 1.凸轮机构是由、、三个基本构件组成的高副机构。 2.凸轮机构按其从动件的基本形式可分为、、 。 3.凸轮机构按凸轮外形可分为、、 、。 4.凸轮机构按凸轮与从动件保持高副接触的方式可分为、。 三、齿轮机构 1.在平面齿轮机构中,传递两平行轴间回转运动的齿轮机构有、 、。 2.在平面齿轮机构中,由转动转换为移动的齿轮机构是。 3.在空间齿轮机构中,传递两相交轴间回转运动的齿轮机构有、 。 4.在空间齿轮机构中,传动两交错轴间回转运动的齿轮机构有、。 四、轮系 1.你所观察到的轮系的功用有哪些? 五、间歇运动机构 1.常用的间歇机构、、、。 2.能实现由连续转动转换为单向间歇回转的间歇机构有哪几类?
六、进行了这次机构现场认识实验后,你有何收获、体会和建议?
机构运动简图实验报告 一、绘制机构运动简图的要求 1.用圆规和三角板,按选定的比例尺绘制机构运动简图。 2.在机构运动简图上,用箭头标示原动件,用阿拉伯数字依次标示各构件,用大写英文字母标示各运动副,并列表说明构件的运动学尺寸。 3.计算机构的自由度。 二、绘制机构运动简图 μ= 机构名称 l 机构运动简图运动学尺寸 原动件数目 机构自由度 该机构是否具有确定的运动规律 μ= 机构名称 l 机构运动简图运动学尺寸 原动件数目 机构自由度 该机构是否具有确定的运动规律
通信网实验报告
实验一:路径选择实验 一、实验目的 在进行通信网选择路由时,首选路由和各个迂回路由通常都是按照路径最短的原则进行的,目的是为了使网络费用达到最小。在求解最短径的算法中常用的有D算法和F算法。D算法用于求指定节点到其他各节点的最短路径;F算法用于求任意端间最短径。在实际中都是由计算机实现这两种算法来帮助设计人员进行路由设计。本次实验目的就是要使学生深入理解这两种算法并能用计算机实现这两种算法。 二、实验内容 用编程语言实现F算法。 F算法M文件内容如下: function [w,r]=fsuanfa(m) % F算法的函数文件 v_num=size(m); v_num=v_num(1); w=zeros(v_num); r=zeros(v_num); for i=1:v_num for j=1:v_num if i~=j if(m(i,j)==0) w(i,j)=inf; else w(i,j)=m(i,j); r(i,j)=j; end end end end disp W0= disp(w) disp R0= disp(r) for k=1:v_num pause;
for i=1:v_num if(i~=k) for j=1:v_num if(w(i,k)+w(k,j) 机械原理实验项目 机械原理课程实验(一) 机械传动性能测试实验 一、实验目的 (1) 通过测试常见机械传动装置(如带传动、链传动、齿轮传动、蜗杆传动等)在传递运动与动力过程中的速度、转矩、传动比、功率及机械效率等,加深对常见机械传动性能的认识与理解。 (2) 通过测试由常见机械传动组成的不同传动系统的机械参数,掌握机械传动合理布置的基本要求。 (3) 通过实验认识机械传动性能综合实验台的工作原理、提高计算机辅助实验能力。 二、实验设备 机械传动性能测试综合实验台。 三、实验内容 机械传动性能测试是一项基于基本传动单元自由组装、利用传感器获取相关信息、采用工控机控制实验对象的综合性实验。它可以测量用户自行组装的机械传动装置中的速度、转矩、传动比、功率与机械效率,具有数据采集与处理、输出结果数据与曲线等功能。 机械传动性能测试实验台的逻辑框图 变频 电机 ZJ 扭矩 传感器 ZJ 扭矩 传感器 工作载荷 扭矩测量卡 转速调节 机械传动装置 负载调节 工控机 扭矩测量卡 机械原理课程实验(二) 慧鱼机器人设计实验 一、实验目的 1)通过对慧鱼机器人、机电产品的系统运动方案的组装设计,培养学生独立确定系统运动方案设计与选型的能力。 2)利用“慧鱼模型”组装机器人模型,探索机器人各个功能的实现方法,进行机电一体化方面的训练。 二、实验设备 1)慧鱼创意组合模型包; 2)计算机一台; 3)可编程控制器、智能接口板; 4)控制软件。 三、实验内容 “慧鱼创意组合模型”是工程技术型模型,能够实现对工程技术以及机器人技术等的模拟仿真。模型是由各种可以相互拼接的零件所组成,由于模型充分体现了各种结构、动力、控制的组成因素,并设计了相应的模块,因此,可以拼装成各种各样的机器人模型,可以用于检验学生的机械结构和机械创新设计与控制的合理可行性。 慧鱼机器人实验二室 自动步行车 学生创新实验 计算机与通信网络实验报告 041220111 戴妍 实验一隐终端与暴露终端问题分析 一、实验设定: 基本参数配置:仿真时长100s;随机数种子1;仿真区域2000x2000;节点数4。 节点位置配置:本实验用[1]、[2]、[3] 、[4]共两对节点验证隐终端问题。节点[1]、[2]距离为200m,节点[3]、[4]距离为200m,节点[2]、[3]距离为370m。 业务流配置:业务类型为恒定比特流CBR。[1]给[2]发,发包间隔为0、01s,发包大小为512bytes;[3]给[4]发,发包间隔为0、01s,发包大小为512bytes。 二、实验结果: Node: 1, Layer:AppCbrClient,(0)Server address:2 Node:1,Layer: AppCbrClient,(0)Firstpacket sent a t[s]:0、000000000 Node: 1,Layer:AppCbrClient,(0)Lastpacket sent at [s]:99、990000000 Node:1,Layer:AppCbrClient,(0) Session status:Not closed Node:1, Layer: AppCbrClient,(0)Totalnumber of bytess ent: 5120000 Node: 1,Layer:AppCbrClient,(0) Total number of packets se nt: 10000 Node:1, Layer: AppCbrClient,(0) Throughput (bits per second):409600 Node:2, Layer:AppCbrServer, (0)Clientaddress: 1 Node: 2, Layer:AppCbrServer,(0) Firstpacket received at [s]:0、007438001 Node:2, Layer:AppCbrServer,(0)Last packetreceiveda t[s]:99、999922073 通信原理实验报告 实验一抽样定理 实验二 CVSD编译码系统实验 实验一抽样定理 一、实验目的 所谓抽样。就是对时间连续的信号隔一定的时间间隔T 抽取一个瞬时幅度值(样值),即x(t)*s(t)=x(t)s(t)。在一个频带限制在(0,f h)内的时间连续信号f(t),如果以小于等于1/(2 f h)的时间间隔对它进行抽样,那么根据这些抽样值就能完全恢复原信号。 抽样定理告诉我们:如果对某一带宽有限的时间连续信号(模拟信号)进行抽样,且抽样速率达到一定数值时,那么根据这些抽样值就能准确地还原信号。这就是说,若要传输模拟信号,不一定要传输模拟信号本身,可以只传输按抽样定理得到的抽样值。 二、功能模块介绍 1.DDS 信号源:位于实验箱的左侧 (1)它可以提供正弦波、三角波等信号,通过连接P03 测试点至PAM 脉冲调幅模块的32P010 作为脉冲幅度调制器的调制信号x(t)。抽样脉冲信号则是通过P09 测试点连至PAM 脉冲调幅模块。 (2)按下复合式按键旋钮SS01,可切换不同的信号输出状态,例如D04D03D02D01=0010 对应的是输出正弦波,每种LED 状态对应一种信号输出,具体实验板上可见。 (3)旋转复合式按键旋钮SS01,可步进式调节输出信号的频率,顺时针旋转频率每步增加100Hz,逆时针减小100Hz。 (4)调节调幅旋钮W01,可改变P03 输出的各种信号幅度。 2.抽样脉冲形成电路模块 它提供有限高度,不同宽度和频率的抽样脉冲序列,可通过P09 测试点连线送到PAM 脉冲调幅模块32P02,作为脉冲幅度调制器的抽样脉冲s(t)。P09 测试点可用于抽样脉冲的连接和测量。该模块提供的抽样脉冲频率可通过旋转SS01 进行调节,占空比为50%。 3.PAM 脉冲调幅模块 它采用模拟开关CD4066 实现脉冲幅度调制。抽样脉冲序列为高电平时,模拟开关导通,有调制信号输出;抽样脉冲序列为低电平,模拟开关断开,无信号输出。因此,本模块实现的是自然抽样。在32TP01 测试点可以测量到已调信号波形。 调制信号和抽样脉冲都需要外接连线输入。已调信号经过PAM 模拟信道(模拟实际信道的惰性)的传输,从32P03 铆孔输出,可能会产生波形失真。PAM 模拟信道电路示意图如下图所示,32W01(R1)电位器可改变模拟信道的传输特性。机械原理实验报告大全
计算机与通信网络实验报告
通信原理实验报告