B-spline Curves(B样条曲线)

Motivation
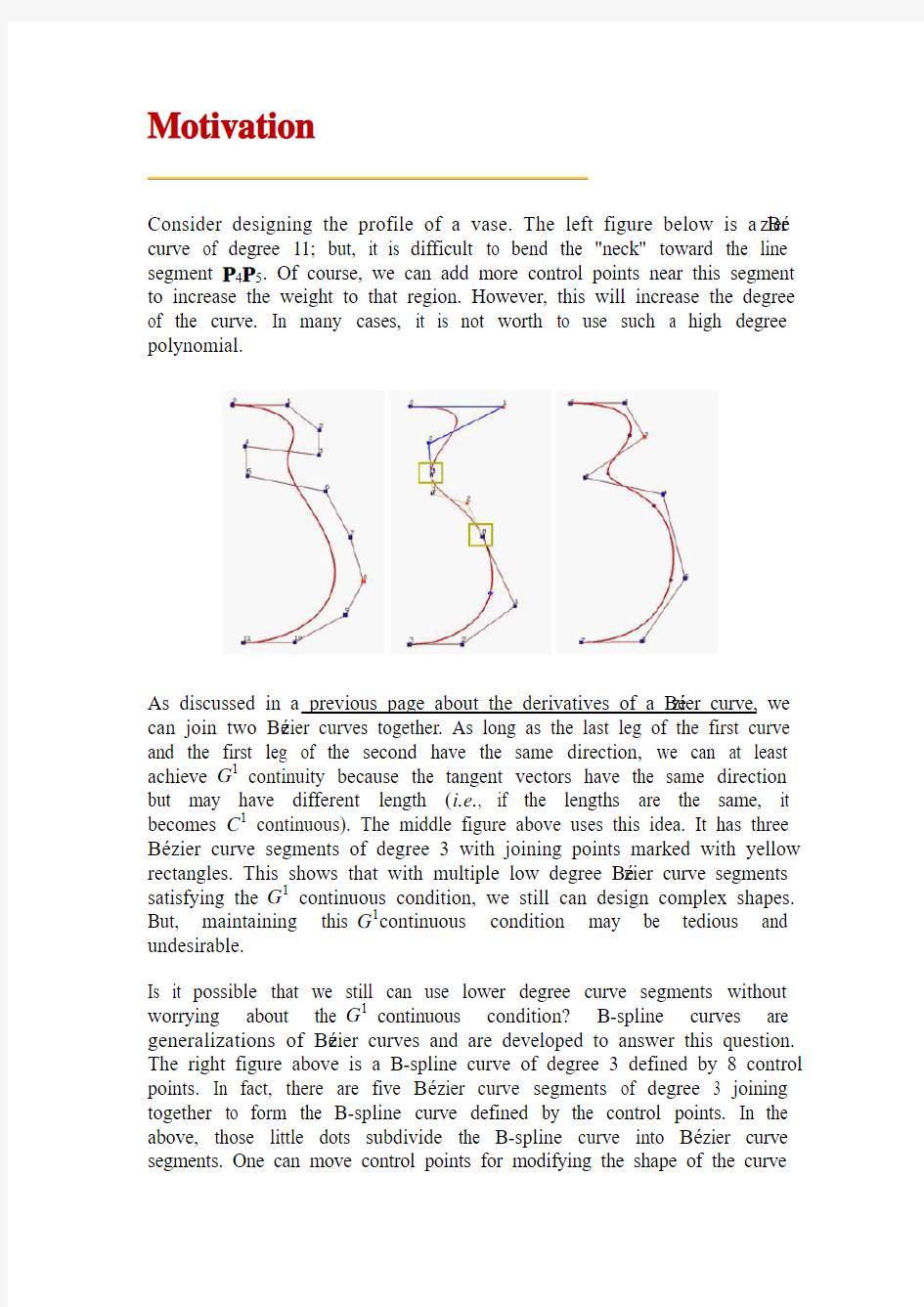
Consider designing the profile of a vase. The left figure below is a Bézier curve of degree 11; but, it is difficult to bend the "neck" toward the line segment P4P5. Of course, we can add more control points near this segment to increase the weight to that region. However, this will increase the degree of the curve. In many cases, it is not worth to use such a high degree polynomial.
As discussed in a previous page about the derivatives of a Bézier curve, we can join two Bézier curves together. As long as the last leg of the first curve and the first leg of the second have the same direction, we can at least achieve G1 continuity because the tangent vectors have the same direction but may have different length (i.e., if the lengths are the same, it becomes C1 continuous). The middle figure above uses this idea. It has three Bézier curve segments of degree 3 with joining points marked with yellow rectangles. This shows that with multiple low degree Bézier curve segments satisfying the G1 continuous condition, we still can design complex shapes. But, maintaining this G1continuous condition may be tedious and undesirable.
Is it possible that we still can use lower degree curve segments without worrying about the G1 continuous condition? B-spline curves are generalizations of Bézier curves and are developed to answer this question. The right figure above is a B-spline curve of degree 3 defined by 8 control points. In fact, there are five Bézier curve segments of degree 3 joining together to form the B-spline curve defined by the control points. In the above, those little dots subdivide the B-spline curve into Bézier curve segments. One can move control points for modifying the shape of the curve
just like what we do to Bézier curves. We can also modify the subdivision of the curve. Therefore, B-spline curves have higher degree of freedom for curve design.
Subdividing the curve directly is difficult to do. Instead, we subdivide the domain of the curve. Thus, if the domain of a curve is [0,1], this closed interval is subdivided by points called knots. Let these knots be 0 <= u0 <= u1 <= ... <= u m <= 1. Then, points C(u i)'s subdivide the curve as shown in the figure below and, consequently, modifying the subdivision of [0,1] changes the shape of the curve.
In summary, to design a B-spline curve, we need a set of control points, a set of knots and a set of coefficients, one for each control point, so that all curve segments are joined together satisfying certain continuity condition. The computation of the coefficients is perhaps the most complex step because they must ensure certain continuity conditions. Fortunately, this computation is usually not needed in this course. We only need to know their characteristics for reasoning about B-spline curves.
B-spline Basis Functions:
Definition
Bézier basis functions are used as weights. B-spline basis functions will be used the same way; however, they are much more complex. There are two interesting properties that are not part of the Bézier basis functions, namely: (1) the domain is subdivided by knots, and (2) basis functions are not non-zero on the entire interval. In fact, each B-spline basis function is non-zero on a few adjacent subintervals and, as a result, B-spline basis functions are quite "local".
Let U be a set of m + 1 non-decreasing numbers, u0 <= u2 <= u3 <= ... <= u m. The u i's are called knots, the set U the knot vector, and the half-open interval [u i, u i+1) the i-th knot span. Note that since some u i's may be equal, some knot spans may not exist.If a knot u i appears k times (i.e., u i = u i+1 = ... = u i+k-1), where k > 1, u i is a multiple knot of multiplicity k, written as u i(k). Otherwise, if u i appears only once, it is a simple knot. If the knots are equally spaced (i.e., u i+1 - u i is a constant for 0 <= i <= m - 1), the knot vector or the knot sequence is said uniform; otherwise, it is non-uniform. The knots can be considered as division points that subdivide the interval [u0, u m] into knot spans. All B-spline basis functions are supposed to have their domain on [u0, u m]. In this note, we use u0 = 0 and u m = 1 frequently so that the domain is the closed interval [0,1].
To define B-spline basis functions, we need one more parameter, the degree of these basis functions, p. The i-th B-spline basis function of degree p, written as N i,p(u), is defined recursively as follows:
The above is usually referred to as the Cox-de Boor recursion formula. This definition looks complicated; but, it is not difficult to understand. If the degree is zero (i.e., p = 0), these basis functions are all step functions and this is what the first expression says. That is, basis function N i,0(u) is 1 if u is
in the i-th knot span [u i, u i+1). For example, if we have four knots u0 = 0, u1 = 1, u2 = 2 and u3 = 3, knot spans 0, 1 and 2 are [0,1), [1,2), [2,3) and the basis functions of degree 0 are N0,0(u) = 1 on [0,1) and 0 elsewhere, N1,0(u) = 1 on [1,2) and 0 elsewhere, and N2,0(u) = 1 on [2,3) and 0 elsewhere. This is shown below:
To understand the way of computing N i,p(u) for p greater than 0, we use the triangular computation scheme. All knot spans are listed on the left (first) column and all degree zero basis functions on the second. This is shown in the following diagram.
To compute N i,1(u), N i,0(u) and N i+1,0(u) are required. Therefore, we can compute N0,1(u), N1,1(u), N2,1(u), N3,1(u) and so on. All of these N i,1(u)'s are written on the third column. Once all N i,1(u)'s have been computed, we can compute N i,2(u)'s and put them on the fourth column. This process continues until all required N i,p(u)'s are computed.
In the above, we have obtained N0,0(u), N1,0(u) and N2,0(u) for the knot vector U = { 0, 1, 2, 3 }. Let us compute N0,1(u) and N1,1(u). To compute N0,1(u), since i = 0 and p = 1, from the definition we have
Since u0 = 0, u1 = 1 and u2 = 2, the above becomes
Since N0,0(u) is non-zero on [0,1) and N1,0(u) is non-zero on [1,2), if u is in [0,1) (resp., [1,2) ), only N0,0(u) (resp., N1,0(u) ) contributes to N0,1(u). Therefore, if u is in [0,1), N0,1(u) is uN0,0(u) = u, and if u is in [1,2),N0,1(u) is (2 - u)N1,0(u) = (2 - u). Similar computation gives N1,1(u) = u - 1 if u is in [1,2), and N1,1(u) = 3 - u if u is in [2,3). In the following figure, the black and red lines are N0,1(u) and N1,1(u), respectively. Note that N0,1(u) (resp., N1,1(u)) is non-zero on [0,1) and [1,2) (resp., [1,2) and [2,3)).
Once N0,1(u) and N1,1(u) are available, we can compute N0,2(u). The definition gives us the following:
Plugging in the values of the knots yields
Note that N0,1(u) is non-zero on [0,1) and [1,2) and N1,1(u) is non-zero on [1,2) and [2,3). Therefore, we have three cases to consider:
1.u is in [0,1):
In this case, only N0,1(u) contributes to the value of N0,2(u).
Since N0,1(u) is u, we have
2.u is in [1,2):
In this case, both N0,1(u) and N1,1(u) contribute to N0,2(u). Since N0,1(u) = 2 - u and N1,1(u) = u - 1 on [1,2), we have
3.u is in [2,3):
In this case, only N1,1(u) contributes to N0,2(u). Since N1,1(u) = 3 - u on [2,3), we have
If we draw the curve segment of each of the above three cases, we shall see that two adjacent curve segments are joined together to form a curve at the knots. More precisely, the curve segments of the first and second cases join together at u = 1, while the curve segments of the second and third cases join at u = 2. Note that the composite curve shown here is smooth. But in general it is not always the case if a knot vector contains multiple knots.
Two Important Observations
Since N i,1(u) is computed from N i,0(u) and N i+1,0(u) and since N i,0(u) and N i+1,0(u) are non-zero on span [u i, u i+1) and [u i+1, u i+2), respectively, N i,1(u) is non-zero on these two spans. In other words, N i,1(u) is non-zero on [u i, u i+2). Similarly, since N i,2(u) depends on N i,1(u) and N i+1,1(u) and since these two basis functions are non-zero on [u i, u i+2) and [u i+1, u i+3), respectively, N i,2(u) is non-zero on [u i, u i+3). In general, to determine the non-zero domain of a basis function N i,p(u), one can trace back using the triangular computation scheme until it reaches the first column. The covered spans are the non-zero domain of this basis function. For example, suppose we want to find out the non-zero domain of N1,3(u). Based on the above discussion, we can trace back in the north-west and south-west directions until the first column is reached as shown with the blue dotted line in the following diagram. Thus, N1,3(u) is non-zero on [u1, u2), [u2, u3), [u3, u4) and [u4, u5). Or, equivalently, it is non-zero on [u1, u5).
In summary, we have the following observation:
Basis function N i,p(u) is non-zero on [u i, u i+p+1). Or,
equivalently, N i,p(u) is non-zero on p+1 knot spans [u i, u i+1),
[u i+1, u i+2), ..., [u i+p, u i+p+1).
Next, we shall look at the opposite direction. Given a knot span [u i, u i+1), we want to know which basis functions will use this span in its computation. We can start with this knot span and draw a north-east bound arrow and a south-east bound arrow. All basis functions enclosed in this wedge shape use N i,0(u) (why?) and hence are non-zero on this span. Therefore, all degree p basis functions that are non-zero on [u i, u i+1) are the intersection of this wedge and the column that contains all N i,p(u)'s. In fact, this column and the two arrows form an equilateral triangle with this column being the vertical side. Counting from N i,0(u) to N i,p(u) there are p+1 columns. Therefore, the vertical side of the equilateral triangle must have at most p+1 entries, namely N i,p(u), N i-1,p(u), N i-2,p(u), ..., N i-p+2,p(u), N i-p+1,p(u) and N i-p,p(u).
Let us take a look at the above diagram. To find all degree 3 basis functions that are non-zero on [u4, u5), draw two arrows and all functions on the vertical edges are what we want. In this case, they are N1,3(u), N2,3(u), N3,3(u), and N4,3(u). This is shown with the orange triangle. The blue (resp., red) triangle shows the degree 3 basis functions that are non-zero on [u3, u4) (resp., [u2, u3) ). Note that there are only three degree three basis polynomials that are non-zero on [u2, u3).
In summary, we have observed the following property.
On any knot span [u i, u i+1), at most p+1 degree p basis
functions are non-zero,
namely: N i-p,p(u), N i-p+1,p(u), N i-p+2,p(u), ..., N i-1,p(u)
and N i,p(u),
What Is the Meaning of the Coefficients?
Finally, let us investigate the meaning of the coefficients in the definition of N i,p(u). As N i,p(u) is being computed, it uses N i,p-1(u) and N i+1,p-1(u). The former is non-zero on [u i, u i+p). If u is in this half-open interval, then u -u i is the distance between u and the left end of this interval, the interval length is u i+p - u i, and (u - u i) / (u i+p - u i) is the ratio of the above mentioned distances and is always in the range of 0 and 1. See the diagram below. The second term, N i,p-1(u), is non-zero on [u i+1, u i+p+1). If u is in this interval, then u i+p+1 - u is the distance from u to the right end of this interval, u i+p+1 - u i+1 is the length of the interval, and (u i+p+1 - u) / (u i+p+1 - u i+1) is the ratio of these two distances and its value is in the range of 0 and 1. Therefore, N i,p(u) is a linear combination of N i,p-1(u) and N i+1,p-1(u) with two coefficients, both linear in u, in the range of 0 and 1.
Important Properties
Let us recall the definition of the B-spline basis functions as follows:
This set of basis functions has the following properties, many of which resemble those of Bézier basis functions.
1.N i,p(u) is a degree p polynomial in u
2.Nonnegativity -- For all i, p and u, N i,p(u) is non-negative
3.Local Support -- N i,p(u) is a non-zero polynomial on [u i,u i+p+1)
This has been discussed on previous page.
4.On any span [u i, u i+1), at most p+1 degree p basis functions are
non-zero, namely: N i-p,p(u), N i-p+1,p(u), N i-p+2,p(u), ..., and N i,p(u)
5.Partition of Unity -- The sum of all non-zero degree p basis
functions on span [u i, u i+1) is 1:
The previous property shows that N i-p,p(u), N i-p+1,p(u), N i-p+2,p(u), ..., and N i,p(u) are non-zero on [u i, u i+1). This one states that the sum of these p+1 basis functions is 1.
6.If the number of knots is m+1, the degree of the basis functions
is p, and the number of degree p basis functions is n+1, then m = n + p + 1:
This is not difficult to see. Let N n,p(u) be the last degree p basis function. It is non-zero on [u n, u n+p+1). Since it is the last basis function, u n+p+1 must be the last knot u m. Therefore, we have u n+p+1 = u m and n+p+1= m. In summary, given m and p, let n = m-p -1 and the degree p basis functions are N0,p(u), N1,p(u), N2,p(u), ..., and N n,p(u).
7.Basis function N i,p(u) is a composite curve of degree p polynomials
with joining points at knots in [u i, u i+p+1 )
The example shown on the previous page illustrates this property well.
For example, N0,2(u), which is non-zero on [0,3), is constructed from three parabolas defined on [0,1), [1,2) and [2,3). They are connected together at the knots 2 and 3.
8.At a knot of multiplicity k, basis function N i,p(u)
is C p-k continuous.
Therefore, increasing multiplicity decreases the level of continuity, and increasing degree increases continuity. The above mentioned degree two basis function N0,2(u) is C1 continuous at knots 2 and 3, since they are simple knots (k = 1).
The Impact of Multiple Knots
Multiple knots do have significant impact on the computation of basis functions and some "counting" properties. We shall look at two of them and
a calculation example will be provided on the next page.
1.Each knot of multiplicity k reduces at most k-1 basis functions'
non-zero domain.
Consider N i,p(u) and N i+1,p(u). The former is non-zero on [u i, u i+p+1) while the latter is non-zero on [u i+1, u i+p+2). If we move u i+p+2 to u i+p+1 so that they become a double knot. Then, N i,p(u) still has p+1 knot spans on which it is non-zero; but, the number of knot spans on which N i+1,p(u) is non-zero is reduced by one because the span [u i+p+1,u i+p+2) disappears.
This observation can be generalized easily. In fact, ignoring the change of knot span endpoints, to create a knot of multiplicity k, k-1 basis functions will be affected. One of them loses one knot span, a second of them loses two, a third of them loses three and so on.
The above shows the basis functions of degree 5 where the left end and right end knots have multiplicity 6, while all middle knots are simple (left on top row). The top right figure is the result of moving u5 to u6. Those basis functions ended at u6 have fewer knot spans on which they are non-zero. In the middle row figures, u4 and then u3 are moved to u6, making u6 a knot of multiplicity 4. The bottom row figure shows the result after moving u2 to u6, creating a knot of multiplicity 5.
2.At each internal knot of multiplicity k, the number of non-zero
basis functions is at most p - k + 1, where p is the degree of the basis functions.
Since moving u i-1 to u i will pull a basis function whose non-zero ends at u i-1 to end at u i, this reduces the number of non-zero basis function at u i by one. More precisely, increasing u i's multiplicity by one will decrease the number of non-zero basis functions by one. Since there are at most p+1 basis functions can be non-zero at u i, the number of non-zero basis functions at a knot of multiplicity k is at most (p + 1) - k = p - k + 1.
In the above figures, since the multiplicity of knot u6 are 1 (simple), 2, 3, 4 and 5, the numbers of non-zero basis function at u6 are 5, 4, 3, 2 and 1.
Computation Examples
Two examples, one with all simple knots while the other with multiple knots, will be discussed in some detail on this page.
Simple Knots
Suppose the knot vector is U = { 0, 0.25, 0.5, 0.75, 1 }. Hence, m = 4 and u0 = 0, u1 = 0.25, u2 = 0.5, u3 = 0.75 and u4 = 1. The basis functions of degree 0 are easy. They are N0,0(u), N1,0(u), N2,0(u) and N3,0(u) defined on knot span [0,0.25,), [0.25,0.5), [0.5,0.75) and [0.75,1), respectively, as shown below.
The following table gives the result of all N i,1(u)'s:
The following shows the graphs of these basis functions. Since the internal knots 0.25, 0.5 and 0.75 are all simple (i.e., k = 1) and p = 1, there are p - k +
1 = 1 non-zero basis function and three knots. Moreover, N0,1(u), N1,1(u) and N2,1(u) are C0 continuous at knots 0.25, 0.5 and 0.75, respectively. From N i,1(u)'s, one can compute the basis functions of degree 2. Since m = 4, p = 2, and m = n + p + 1, we have n = 1 and there are only two basis functions of degree 2: N0,2(u) and N1,2(u). The following table is the result:
The following figure shows the two basis functions. The three vertical blue lines indicate the positions of knots. Note that each basis function is a composite curve of three degree 2 curve segments. For example, N0,2(u) is the green curve, which is the union of three parabolas defined on [0,0.25),
[0.25, 0.5) and [0.5,0.75). These three curve segments join together forming
a smooth bell shape. Please verify that N0,2(u,) (resp., N1,2(u)) is C1 continuous at its knots 0.25 and 0.5 (resp., 0.5 and 0.75). As mentioned on the previous page, at the knots, this composite curve is of C1 continuity.
Knots with Positive Multiplicity
If a knot vector contains knots with positive multiplicity, we will encounter the case of 0/0 as will be seen later. Therefore, we shall define 0/0 to be 0. Fortunately, this is only for hand calculation. For computer implementation, there is an efficient algorithm free of this problem. Furthermore, if u i is a knot of multiplicity k (i.e., u i = u i+1 = ... = u i+k-1), then knot spans [u i,u i+1), [u i+1,u i+2), ..., [u i+k-2,u i+k-1) do not exist, and, as a result, N i,0(u), N i+1,0(u), ..., N i+k-1,0(u) are all zero functions.
Consider a knot vector U = { 0, 0, 0, 0.3, 0.5, 0.5, 0.6, 1, 1, 1 }. Thus, 0 and 1 are of multiplicity 3 (i.e., 0(3) and 1(3)) and 0.5 is of multiplicity 2 (i.e., 0.5(2)). As a result, m = 9 and the knot assignments are
Let us compute N i,0(u)'s. Note that since m = 9 and p = 0 (degree 0 basis functions), we have n = m - p - 1 = 8. As the table below shows, there are only four non-zero basis functions of degree 0:N2,0(u), N3,0(u), N5,0(u) and N6,0(u).
Then, we proceed to basis functions of degree 1. Since p is 1, n = m - p - 1 = 7. The following table shows the result:
The following figure shows the graphs of these basis functions.
Let us take a look at a particular computation, say N1,1(u). It is computed with the following expression:
Plugging u1 = u2 = 0 and u3 = 0.3 into this equation yields the following:
Since N1,0(u) is zero everywhere, the first term becomes 0/0 and is defined to be zero. Therefore, only the second term has an impact on the result. Since N2,0(u) is 1 on [0,0.3), N1,1(u) is 1 - (10/3)u on [0,0.3).
Next, let us compute all N i,2(u)'s. Since p = 2, we have n = m - p - 1 = 6. The following table contains all N i,2(u)'s:
The following figure shows all basis functions of degree 2.
Let us pick a typical computation as an example, say N3,2(u). The expression for computing it is
Plugging in u3 = 0.3, u4 = u5 = 0.5 and u6 = 0.6 yields
Since N3,1(u) is non-zero on [0.3, 0.5) and is equal to 5u - 1.5, (5u - 1.5)2 is the non-zero part of N3,2(u) on [0.3, 0.5). Since N4,1(u) is non-zero on [0.5, 0.6) and is equal to 6 - 10u, (6 - 10u)2 is the non-zero part of N3,2(u) on [0.5, 0.6).
Let us investigate the continuity issues at knot 0.5(2). Since its multiplicity is 2 and the degree of these basis functions is 2, basis function N3,2(u) is C0 continuous at 0.5(2). This is why N3,2(u) has a sharp angle at 0.5(2). For knots not at the two ends, say 0.3, C1 continuity is maintained since all of them are simple knots.
B-spline Curves:
Definition
Given n +1 control points P0, P1, ..., P n and a knot vector U = { u0, u1, ..., u m }, the B-spline curve of degree p defined by these control points and knot vector U is
where N i,p(u)'s are B-spline basis functions of degree p. The form of a B-spline curve is very similar to that of a Bézier curve. Unlike a Bézier curve, a B-spline curve involves more information, namely: a set of n+1 control points, a knot vector of m+1 knots, and a degree p.Note that n, m and p must satisfy m = n+p+1. More precisely, if we want to define a B-spline curve of degree p with n+1 control points, we have to supply n+p+2 knots u0, u1, ..., u n+p+1. On the other hand, if a knot vector of m + 1 knots and n + 1 control points are given, the degree of the B-spline curve is p =m - n - 1. The point on the curve that corresponds to a knot u i, C(u i), is referred to as a knot point. Hence, the knot points divide a B-spline curve into curve segments, each of which is defined on a knot span. We shall show that these curve segments are all Bézier curve of degree p on the curve subdivision page.
Although N i,p(u) looks like B n,i(u), the degree of a B-spline basis function is an input, while the degree of a Bézier basis function depends on the number of control points. To change the shape of a B-spline curve, one can modify one or more of these control parameters: the positions of control points, the positions of knots, and the degree of the curve.
If the knot vector does not have any particular structure, the generated curve will not touch the first and last legs of the control polyline as shown in the left figure below. This type of B-spline curves is called open B-spline curves. We may want to clamp the curve so that it is tangent to the first and the last legs at the first and last control points, respectively, as a Bézier curve does. To do so, the first knot and the last knot must be of multiplicity p+1. This will generate the so-called clamped B-spline curves. See the middle figure below. By repeating some knots and control points, the generated curve can be a closed one. In this case, the start and the end of the generated curve join
together forming a closed loop as shown in the right figure below. In this note, we shall use clamped curve.
(a) open (b) clamped (c) closed
The above figures have n+1 control points (n=9) and p = 3. Then, m must be 13 so that the knot vector has 14 knots. To have the clamped effect, the first p+1 = 4 and the last 4 knots must be identical. The remaining 14 - (4 + 4) = 6 knots can be anywhere in the domain. In fact, the curve is generated with knot vector U = { 0, 0, 0, 0, 0.14, 0.28, 0.42, 0.57, 0.71, 0.85, 1, 1, 1, 1 }. Note that except for the first four and last four knots, the middle ones are almost uniformly spaced. The figures also show the corresponding curve segment on each knot span. In fact, the little triangles are the knot points. The Use of Terms
We use open, clamped and closed to describe three types of B-spline curves. However, not every author would use the same terminology and there is no agreement for a standard use. For example, some authors may use floating, open and periodic for open, clamped and closed curves. Some other authors may use "periodic" for an open B-spline curve with a uniform knot sequence. Therefore, when you read other literature, make sure you first check the definitions. Otherwise, it is likely that you could be confused, Please continue with open curves and closed curves.
Open Curves
As mentioned earlier, if the first and last knots do not have multiplicity p+1, where p is the degree of a B-spline curve, the curve will not be tangent to the first and last legs at the first and last control points, respectively. The
curve is an open B-spline curve. In this case, we should be careful about one additional restriction. On a previous page we showed an example of basis function computation using knot vector U = { 0, 0.25, 0.5, 0.75, 1 }, where m = 4. If the basis functions are of degree 1 (i.e., p = 1), there are three basis functions N0,1(u), N1,1(u) and N2,1(u) as shown below.
Since this knot vector is not clamped, the first and the last knot spans (i.e., [0, 0.25) and [0.75, 1)) have only one non-zero basis functions while the second and third knot spans (i.e., [0.25, 0.5) and [0.5, 0.75)) have two non-zero basis functions. Recall from the B-spline basis function important properties that on a knot span [u i, u i+1), there are at most p+1 degree p non-zero basis functions of degree p. Therefore, in this example, knot spans [0,0.25) and [0.75,1) do not have "full support" of basis functions. In general, for degree p, intervals [u0, u p) and [u m-p, u m] will not have "full support" of basis functions and are ignored when a B-spline curve is open. Consequently, we have the following important note:
Consider a B-spline curve of degree 6 (i.e., p = 6) defined by 14 control points (i.e., n = 13). The number of knots is 21 (i.e., m = n + p + 1 = 20). If the knot vector is uniform, the knots are 0, 0.05, 0.10, 0.15, ..., 0.90, 0.95 and 1.0. The open curve is defined on [u p, u n-p] = [u6, u14] = [0.3, 0.7] and is not tangent to the first and last legs. The left figure below shows the curve and the right figuregives the B-spline basis functions.
曲线运动典型例题
一、选择题 1、一石英钟的分针和时针的长度之比为3:2,均可看作是匀速转动,则() A.分针和时针转一圈的时间之比为1:60 B.分针和时针的针尖转动的线速度之比为40:1 C.分针和时针转动的角速度之比为12:1 D.分针和时针转动的周期之比为1:6 2、有一种杂技表演叫“飞车走壁”,由杂技演员驾驶摩托车沿圆台形表演台的内侧壁高速行驶,做匀速圆周运动.如图所示中虚线圆表示摩托车的行驶轨迹,轨迹离地面的高度为h.下列说法中正确的是() A.h越高,摩托车对侧壁的压力将越大B.h越高,摩托车做圆周运动的线速度将越大 C.h越高,摩托车做圆周运动的周期将越大D.h越高,摩托车做圆周运动的向心力将越大 3、 A、B两小球都在水平面上做匀速圆周运动,A球的轨道半径是B球的轨道半径的2倍,A的转速为30 r/min,B 的转速为r/min,则两球的向心加速度之比为:() A.1:1 B.6:1 C.4:1 D.2:1 4、两个质量相同的小球a、b用长度不等的细线拴在天花板上的同一点并在空中同一水平面内做匀速圆周运动,如图所示,则a、b两小球具有相同的 A.角速度B.线速度C.向心力D.向心加速度 5、关于平抛运动和匀速圆周运动,下列说法中正确的是() A.平抛运动是匀变速曲线运动B.平抛运动速度随时间的变化是不均匀的 C.匀速圆周运动是线速度不变的圆周运动D.做匀速圆周运动的物体所受外力的合力做功不为零 6、在水平面上转弯的摩托车,如图所示,提供向心力是 A.重力和支持力的合力B.静摩擦力C.滑动摩擦力D.重力、支持力、牵引力的合力 7、如图所示,在粗糙水平板上放一个物体,使水平板和物体一起在竖直平面内沿逆时针方向做匀速圆周运动,ab为水平直径,cd为竖直直径,在运动过程中木板始终保持水平,物块相对木板始终静止,则() A.物块始终受到三个力作用 B.只有在a、b、c、d四点,物块受到合外力才指向圆心 C.从a到b,物体所受的摩擦力先减小后增大 D.从b到a,物块处于失重状态
2019高考物理练习(曲线运动)经典例题(带解析)
2019高考物理练习(曲线运动)经典例题(带解析) 1、关于曲线运动,以下说法中正确的选项是〔AC〕 A.曲线运动一定是变速运动 B.变速运动一定是曲线运动 C.曲线运动可能是匀变速运动 D.变加速运动一定是曲线运动 【解析】曲线运动的速度方向沿曲线的切线方向,一定是变化的,所以曲线运动一定是变速运动。变速运动可能是速度的方向不变而大小变化,那么可能是直线运动。当物体受到的合力是大小、方向不变的恒力时,物体做匀变速运动,但力的方向可能与速度方向不在一条直线上,这时物体做匀变速曲线运动。做变加速运动的物体受到的合力可能大小不变,但方向始终与速度方向在一条直线上,这时物体做变速直线运动。 2、质点在三个恒力F1、F2、F3的共同作用下保持平衡状态,假设突然撤去F1,而保持F2、F3不变,那么质点〔A〕 A、一定做匀变速运动 B、一定做直线运动 C、一定做非匀变速运动 D、一定做曲线运动 【解析】质点在恒力作用下产生恒定的加速度,加速度恒定的运动一定是匀变速运动。由题意可知,当突然撤去F1而保持F2、F3不变时,质点受到的合力大小为F1,方向与F1相反,故一定做匀变速运动。在撤去F1之前,质点保持平衡,有两种可能:一是质点处于静止状态,那么撤去F1后,它一定做匀变速直线运动;其二是质点处于匀速直线运动状态,那么撤去F1后,质点可能做直线运动〔条件是F1的方向和速度方向在一条直线上〕,也可能做曲线运动〔条件是F1的方向和速度方向不在一条直线上〕。 3、关于运动的合成,以下说法中正确的选项是〔C〕 A.合运动的速度一定比分运动的速度大 B.两个匀速直线运动的合运动不一定是匀速直线运动 C.两个匀变速直线运动的合运动不一定是匀变速直线运动 D.合运动的两个分运动的时间不一定相等 【解析】根据速度合成的平行四边形定那么可知,合速度的大小是在两分速度的和与两分速度的差之间,故合速度不一定比分速度大。两个匀速直线运动的合运动一定是匀速直线运动。两个匀变速直线运动的合运动是否是匀变速直线运动,决定于两初速度的合速度方向是否与合加速度方向在一直线上。如果在一直线上,合运动是匀变速直线运动;反之,是匀变速曲线运动。根据运动的同时性,合运动的两个分运动是同时的。 4、质量m=0.2kg的物体在光滑水平面上运动,其分速度v x和v y随时间变化的图线如下图, 求: (1)物体所受的合力。 (2)物体的初速度。 (3)判断物体运动的性质。 (4)4s末物体的速度和位移。 【解析】根据分速度v x和v y随时间变化的图线可知,物体在x轴上的分运 动是匀加速直线运动,在y轴上的分运动是匀速直线运动。从两图线中求出物体的加速度与速度的分量,然后再合成。 (1) 由图象可知,物体在x轴上分运动的加速度大小a x=1m/s2,在y轴上分运动的加速度为0,故物体的合加速度大小为a=1m/s2,方向沿x轴的正方向。那么物体所受的合力F=ma=0.2×1N=0.2N,方向沿x轴的正方向。 (2) 由图象知,可得两分运动的初速度大小为v x0=0,v y0=4m/s,故物体的初速度
曲线运动经典例题
《曲线运动》经典例题 1、关于曲线运动,下列说法中正确的是(AC) A. 曲线运动一定是变速运动 B. 变速运动一定是曲线运动 C. 曲线运动可能是匀变速运动 D. 变加速运动一定是曲线运动 【解析】曲线运动的速度方向沿曲线的切线方向,一定是变化的,所以曲线运动一定是变速运动。变速运动可能是速度的方向不变而大小变化,则可能是直线运动。当物体受到的合力是大小、方向不变的恒力时,物体做匀变速运动,但力的方向可能与速度方向不在一条直线上,这时物体做匀变速曲线运动。做变加速运动的物体受到的合力可能大小不变,但方向始终与速度方向在一条直线上,这时物体做变速直线运动。 2、质点在三个恒力F1、F2、F3的共同作用下保持平衡状态,若突然撤去F1,而保持F2、F3不变,则质点(A) A.一定做匀变速运动B.一定做直线运动 C.一定做非匀变速运动D.一定做曲线运动 【解析】质点在恒力作用下产生恒定的加速度,加速度恒定的运动一定是匀变速运动。由题意可知,当突然撤去F1而保持F2、F3不变时,质点受到的合力大小为F1,方向与F1相反,故一定做匀变速运动。在撤去F1之前,质点保持平衡,有两种可能:一是质点处于静止状态,则撤去F1后,它一定做匀变速直线运动;其二是质点处于匀速直线运动状态,则撤去F1后,质点可能做直线运动(条件是F1的方向和速度方向在一条直线上),也可能做曲线运动(条件是F1的方向和速度方向不在一条直线上)。 3、关于运动的合成,下列说法中正确的是(C) A. 合运动的速度一定比分运动的速度大 B. 两个匀速直线运动的合运动不一定是匀速直线运动 C. 两个匀变速直线运动的合运动不一定是匀变速直线运动 D. 合运动的两个分运动的时间不一定相等 【解析】根据速度合成的平行四边形定则可知,合速度的大小是在两分速度的和与两分速度的差之间,故合速度不一定比分速度大。两个匀速直线运动的合运动一定是匀速直线运动。两个匀变速直线运动的合运动是否是匀变速直线运动,决定于两初速度的合速度方向是否与合加速度方向在一直线上。如果在一直线上,合运动是匀变速直线运动;反之,是匀变速曲线运动。根据运动的同时性,合运动的两个分运动是同时的。 4、质量m=0.2kg的物体在光滑水平面上运动,其分速度v x和v y随时间变化的图线如图所示,求: (1)物体所受的合力。 (2)物体的初速度。 (3)判断物体运动的性质。 (4)4s末物体的速度和位移。 【解析】根据分速度v x和v y随时间变化的图线可知,物体在x 轴上的分运动是匀加速直线运动,在y轴上的分运动是匀速直线 运动。从两图线中求出物体的加速度与速度的分量,然后再合成。 (1) 由图象可知,物体在x轴上分运动的加速度大小a x=1m/s2,在y轴上分运动的加速度为0,故物体的合加速度大小为a=1m/s2,方向沿x轴的正方向。则物体所受的合力 F=ma=0.2×1N=0.2N,方向沿x轴的正方向。 (2) 由图象知,可得两分运动的初速度大小为 v x0=0,v y0=4m/s,故物体的初速度
高中物理曲线运动经典题型总结-(1)word版本
专题 曲线运动 一、运动的合成和分解 【题型总结】 1.合力与轨迹的关系 如图所示为一个做匀变速曲线运动质点的轨迹示意图,已知在B 点的速度与加速度相互垂直,且质点的运动方向是从A 到E ,则下列说法中正确的是( ) A .D 点的速率比C 点的速率大 B .A 点的加速度与速度的夹角小于90° C .A 点的加速度比D 点的加速度大 D .从A 到D 加速度与速度的夹角先增大后减小 2.运动的合成和分解 例:一人骑自行车向东行驶,当车速为4m /s 时,他感到风从正南方向吹来,当车速增加到7m /s 时。他感到风从东南方向(东偏南45o)吹来,则风对地的速度大小为( ) A. 7m/s B. 6m /s C. 5m /s D. 4 m /s 3.绳(杆)拉物类问题 例:如图所示,重物M 沿竖直杆下滑,并通过绳带动小车m 沿斜面升高.问:当滑轮右侧的绳与竖直方向成θ角,且重物下滑的速率为v 时,小车的速度为多少? 练习1:一根绕过定滑轮的长绳吊起一重物B ,如图所示,设汽车和重物的速度的大小分别为B A v v ,,则( ) A 、 B A v v = B 、B A v v ? C 、B A v v ? D 、重物B 的速度逐渐增大 4.渡河问题 例1:在抗洪抢险中,战士驾驶摩托艇救人,假设江岸是平直的,洪水沿江向下游流去,水流速度为v 1,摩托艇在静水中的航速为v 2,战士救人的地点A 离岸边最近处O 的距离为d ,如战士想在最短时间内将人送上岸,则摩托艇登陆的地点离O 点的距离为( ) 例2:某人横渡一河流,船划行速度和水流动速度一定,此人过河最短时间为了T 1;若此船用最短的位移过河,则需时间为T 2,若船速大于水速,则船速与水速之比为( ) (A) (B) (C) (D) 【巩固练习】 1、 一个劈形物体M ,各面都光滑,放在固定的斜面上,上表面水平,在上表面放一个 光滑小球m ,劈形物体由静止开始释放,则小球在碰到斜面前的运动轨迹是( ) m
高一物理曲线运动重难点解析及典型例题
第五章 曲线运动 第五节 圆周运动 第六节 向心加速度 二. 知识要点: 1. 认识匀速圆周运动的概念,理解线速度的概念,知道它就是物体做匀速圆周运动的瞬时速度;理解角速度和周期的概念,会用它们的公式进行计算。理解线速度、角速度、周期之间的关系:v=rω=2πr /T 。理解匀速圆周运动是变速运动。 2. 理解速度变化量和向心加速度的概念,知道向心加速度和线速度、角速度的关系式。能够运用向心加速度公式求解有关问题。 3. 运用极限法理解线速度的瞬时性。掌握运用圆周运动的特点如何去分析有关问题。体会有了线速度后。为什么还要引入角速度。运用数学知识推导角速度的单位。 三. 重难点解析: 1. 线速度 (1)定义:质点沿圆周运动通过的弧长Δl 与所用时间Δt 之比叫做线速度。它描述质点沿圆周运动的快慢。 (2)大小: t l v ??= 单位:m/s (3)方向:质点在某点的线速度方向沿着圆周上该点的切线方向。 2. 匀速圆周运动 (1)定义:物体沿着圆周运动,并且线速度大小处处相等的运动叫匀速圆周运动。 (2)因线速度方向不断发生变化,故匀速圆周运动是变速运动,这里的“匀速”是指速率不变。 3. 角速度 (1)定义:在匀速圆周运动中,连接质点和圆心的半径转过的角度与所用时间的比值,就是指点的角速度。描述质点转过圆心角的快慢。匀速圆周运动是角速度不变的圆周运动。 (2)大小: t ??= θω,单位:rad /s 4. 周期T 、频率f 和转速n 定义:做圆周运动的物体运动一周所用的时间叫做周期,用T 表示,单位为秒(s )。 做圆周运动的物体运动一秒,所转过圆周的次数叫做频率,用f 表示,单位为赫兹(Hz )。1 Hz=11 -S 。 做圆周运动的物体在单位时间内沿圆周绕圆心转过的圈数叫做转速。用n 表示,单位为转每秒(r /s ),或转每分(r /min )。 周期频率和转速都是描述物体做圆周运动快慢的物理量。 5. 描述圆周运动各物理量的关系 (1)线速度和角速度间的关系。 v= rω。 (2)线速度与周期的关系。 T r v π2= 。 (3)角速度与周期的关系。
贝塞尔曲线和B样条曲线(优质参考)
§4.3 贝塞尔曲线和B 样条曲线 在前面讨论的抛物样条和三次参数样条曲线,他们的共同特点是:生成的曲线通过所有给定的型值点。我们称之为“点点通过”。但在实际工作中,往往给出的型值点并不是十分精确,有的点仅仅是出于外观上的考虑。在这样的前提下,用精确的插值方法去一点点地插值运算就很不合算;另外,局部修改某些型值点,希望涉及到曲线的范围越小越好,这也是评价一种拟合方法好坏的指标之一。 针对以上要求,法国人Bezier 提出了一种参数曲线表示方法,称之为贝塞尔曲线。后来又经Gorgon, Riesenfeld 和Forrest 等人加以发展成为B 样条曲线。 一、 贝塞尔曲线 贝塞尔曲线是通过一组多边折线的各顶点来定义。在各顶点中,曲线经过第一点和最后一点,其余各点则定义曲线的导数、阶次和形状。第一条和最后一条则表示曲线起点和终点的切线方向。 1.数学表达式 n+1个顶点定义一个n 次贝塞尔曲线,其表达式为: )()(0,t B p t p n i n i i ∑== 10≤≤t ),...,2,1,0(n i p i =为各顶点的位置向量,)(,t B n i 为伯恩斯坦基函数 i n i n i t t n i n t B ---= )1()! 1(!! )(, 2.二次贝塞尔曲线 需要3个顶点,即210,,p p p ,将其代入曲线表达式: 2,222,112,00)(B p B p B p t p ++=
220202,021)1() 1()! 02(!0! 2t t t t t B +-=-=--= - 21212,122)1(2)1()! 12(!1! 2t t t t t t B -=-=--= - 22222,2)1()! 22(!2! 2t t t B =--= - 221202)22()21()(p t p t t p t t t p +-++-= [ ] ?? ?? ? ???????????????--=2102 0010221211p p p t t 10≤≤t 2102)21(2)1(2)(tp p t p t t p +-+-=' )(222)0(0110p p p p p -=+-=' 0)0(p p = )(222)1(1221p p p p p -=+-=' 2)1(p p = 当2 1 = t 时: 21021041214141)412212()412121(21p p p p p p p ++=+?-?++?-=?? ? ?? )](2 1 [21201p p p ++= 02210212)2121(2)121(221p p p p p p -=?+?-+-=?? ? ??'
曲线运动复习提纲及经典习题
《曲线运动》复习提纲 一、曲线运动 1.曲线运动速度方向:时刻变化; 曲线该点的切线方向。 2.做曲线运动的条件:物体所受合外力方向与它的速度方向不在同一直线上(即F(a)与v 不共线) 3.曲线运动的性质:曲线运动一定是变速运动,即曲线运动的加速度a ≠0。 ①做曲线运动的物体所受合外力的方向指向曲线弯曲的一侧(凹侧)。 ②轨迹在力和速度方向之间 4.曲线运动研究方法:运动合成和分解。(实际上是F 、a 、v 的合成分解) 遵循平行四边形定则(或三角形法则) 二、运动的合成与分解 物体实际运动叫合运动 物体同时参与的运动叫分运动 (1)合运动与分运动的关系: ①独立性。 ②等时性。 ③等效性。 (2)几个结论:①两个匀速直线运动的合运动仍是匀速直线运动。 ②一个匀速直线运动和一个匀变速直线运动的合运动,不一定是直线运动(如平抛运动)。 ③两个匀变速直线运动的合运动,一定是匀变速运动,但不一定是直线运动。 (3)典型模型:①船过河模型 1)处理方法:小船在有一定流速的水中过河时,实际 上参与了 两个方向的分运动:随水流的运动(水速),在静水中的船的运动 (就是船头指向的方向)。 船的实际运动是合运动。 2)若小船要垂直于河岸过河,过河路径最短,应将船头偏向上游,如图甲所示,此时过河时间: θsin 1v d v d t ==合 3)若使小船过河的时间最短,应使船头正对河岸行驶,此时过河时间1 v d t =(d 为河宽)。因为在垂直于 河岸方向上,位移是一定的,船头按这样的方向,在垂直于河岸方向上的速度最大。 ②绳(杆)端问题 船的运动(即绳的末端的运动)可看作两个分运动的合成: a)沿绳的方向被牵引,绳长缩短,绳长缩短的速度等于左端绳子伸长的速度。即为v ; b)垂直于绳以定滑轮为圆心的摆动,它不改变绳长。这样就可以求得船的速度为αcos v , 当船向左移动, α将逐渐变大,船速逐渐变大。虽然匀速拉绳子,但物体A 却在做变速运动。 三、平抛运动 1.运动性质 a)水平方向:以初速度v 0做匀速直线运动. b)竖直方向:以加速度a=g 做初速度为零的匀变速直线运动,即自由落体运动. 说明:在水平和竖直方向的两个分运动同时存在,互不影响,具有独立性.合运动是匀变速曲线运动.相等的时间内速度的变化量相等.由△v=gt ,速度的变化必沿竖直方向 2.平抛运动的规律 以抛出点为坐标原点,以初速度v 0方向为x 正方向,竖直向下为y 正 方向,如右图所示,则有: 分速度 gt v v v y x ==,0
物理必修2第五章曲线运动经典分类例题
第五章曲线运动经典分类例题 §5.1 曲线运动基础 一、知识讲解 二、【典型例题】 知识点1、力和运动的关系 1、曲线运动的定义: 2、合外力决定运动的速度: 】 3、合外力和速度是否共线决定运动的轨迹: 4、物体做曲线运动的条件: 习题 1、关于曲线运动的速度,下列说法正确的是:() A、速度的大小与方向都在时刻变化 ) B、速度的大小不断发生变化,速度的方向不一定发生变化 C、速度的方向不断发生变化,速度的大小不一定发生变化 D、质点在某一点的速度方向是在曲线的这一点的切线方向 2、下列叙述正确的是:() A、物体在恒力作用下不可能作曲线运动 B、物体在变力作用下不可能作直线运动 C、物体在变力或恒力作用下都有可能作曲线运动 D、物体在变力或恒力作用下都可能作直线运动 ^ 3、下列关于力和运动关系的说法中,正确的上:() A.物体做曲线运动,一定受到了力的作用 B.物体做匀速运动,一定没有力作用在物体上 C.物体运动状态变化,一定受到了力的作用 D.物体受到摩擦力作用,运动状态一定会发生改变 4、下列曲线运动的说法中正确的是:() A、速率不变的曲线运动是没有加速度的 B、曲线运动一定是变速运动 C、变速运动一定是曲线运动 D、曲线运动一定有加速度,且一定是匀加速曲线运动; 5、物体受到的合外力方向与运动方向关系,正确说法是:() A、相同时物体做加速直线运动 B、成锐角时物体做加速曲线运动 C、成钝角时物体做加速曲线运动 D、如果一垂直,物体则做速率不变的曲线运动6.某质点作曲线运动时:() A.在某一点的速度方向是该点曲线的切线方向 B.在任意时间内位移的大小总是大于路程
高中物理曲线运动经典习题30道-带答案
一.选择题(共25小题) 1.(2015春?苏州校级月考)如图所示,在水平地面上做匀速直线运动的汽车,通过定滑轮用绳子吊起一个物体,若汽车和被吊物体在同一时刻的速度分别为v1和v2,则下面说法正确的是() A.物体做匀速运动,且v2=v1B.物体做加速运动,且v2>v1 C.物体做加速运动,且v2<v1D.物体做减速运动,且v2<v1 2.(2015春?潍坊校级月考)如图所示,沿竖直杆以速度v为速下滑的物体A,通过轻质细绳拉光滑水平面上的物体B,细绳与竖直杆间的夹角为θ,则以下说法正确的是() A.物体B向右做匀速运动B.物体B向右做加速运动 C.物体B向右做减速运动D.物体B向右做匀加速运动 3.(2014?蓟县校级二模)如图所示,绕过定滑轮的细绳一端拴在小车上,另一端吊一物体A,A的重力为G,若小车沿水平地面向右匀速运动,则() A.物体A做加速运动,细绳拉力小于G B.物体A做加速运动,细绳拉力大于G C.物体A做减速运动,细绳拉力大于G D.物体A做减速运动,细绳拉力小于G 4.(2014秋?鸡西期末)如图所示,用绳跨过定滑轮牵引小船,设水的阻力不变,则在小船匀速靠岸的过程中() A.绳子的拉力不断增大B.绳子的拉力不变 C.船所受浮力增大D.船所受浮力变小 5.(2014春?邵阳县校级期末)人用绳子通过动滑轮拉A,A穿在光滑的竖直杆上,当以速度v0匀速地拉绳使物体A到达如图所示位置时,绳与竖直杆的夹角为θ,求A物体实际运动的速度是() A.v0sinθB.C.v0cosθD. 6.(2013秋?海曙区校级期末)如图中,套在竖直细杆上的环A由跨过定滑轮的不可伸长的轻绳与重物B相连.由于B的质量较大,故在释放B后,A将沿杆上升,当A环上升至与定滑轮的连线处于水平位置时,其上升速度V1≠0,若这时B的速度为V2,则()
高中物理曲线运动经典习题道带答案
一.选择题(共25小题)1.(2015春?苏州校级月考)如图所示,在水平地面上做匀速直线运动的汽车,通过定滑轮用绳子吊起一个物体,若汽车和被吊物体在同一时刻的速度分别为v1和v2,则下面说法正确的是() A.物体做匀速运动,且v2=v1B.物体做加速运动,且v2>v1 C.物体做加速运动,且v2<v1D.物体做减速运动,且v2<v1 2.(2015春?潍坊校级月考)如图所示,沿竖直杆以速度v为速下滑的物体A,通过轻质细绳拉光滑水平面上的物体B,细绳与竖直杆间的夹角为θ,则以下说法正确的是() A.物体B向右做匀速运动B.物体B向右做加速运动 C.物体B向右做减速运动D.物体B向右做匀加速运动3.(2014?蓟县校级二模)如图所示,绕过定滑轮的细绳一端拴在小车上,另一端吊一物体A,A的重力为G,若小车沿水平地面向右匀速运动,则() A.物体A做加速运动,细绳拉力小于G B.物体A做加速运动,细绳拉力大于G C.物体A做减速运动,细绳拉力大于G D.物体A做减速运动,细绳拉力小于G 4.(2014秋?鸡西期末)如图所示,用绳跨过定滑轮牵引小船,设水的阻力不变,则在小船匀速靠岸的过程中() A.绳子的拉力不断增大B.绳子的拉力不变 C.船所受浮力增大D.船所受浮力变小 5.(2014春?邵阳县校级期末)人用绳子通过动滑轮拉A,A穿在光滑的竖直杆上,当以速度v0匀速地拉绳使物体A到达如图所示位置时,绳与竖直杆的夹角为θ,求A物体实际运动的速度是()
A.v0sinθB.C.v0cosθD. 6.(2013秋?海曙区校级期末)如图中,套在竖直细杆上的环A由跨过定滑轮的不可伸长的轻绳与重物B相连.由于B的质量较大,故在释放B后,A将沿杆上升,当A 环上升至与定滑轮的连线处于水平位置时,其上升速度V1≠0,若这时B的速度为V2,则() A.V2=V1B.V2>V1C.V2≠0D.V2=0 7.(2015?普兰店市模拟)做平抛运动的物体,在水平方向通过的最大距离取决于() A.物体的高度和受到的重力 B.物体受到的重力和初速度 C.物体的高度和初速度 D.物体受到的重力、高度和初速度 8.(2015?云南校级学业考试)关于平抛物体的运动,下列说法中正确的是()A.物体只受重力的作用,是a=g的匀变速运动 B.初速度越大,物体在空中运动的时间越长 C.物体落地时的水平位移与初速度无关 D.物体落地时的水平位移与抛出点的高度无关 9.(2014?陕西校级模拟)一水平抛出的小球落到一倾角为θ的斜面上时,其速度方向与斜面垂直,运动轨迹如图中虚线所示.小球在竖直方向下落的距离与在水平方向通过的距离之比为() A.B.C.t anθD.2tanθ10.(2011?广东)如图所示,在网球的网前截击练习中,若练习者在球网正上方距地面H处,将球以速度v沿垂直球网的方向击出,球刚好落在底线上,已知底线到网的距离为L,重力加速度取g,将球的运动视作平抛运动,下列表述正确的是()
曲线运动相关例题讲解(含答案)
曲线运动 【经典例题】 【例1】关于曲线运动,下列说法正确的是( ) A.曲线运动不一定是变速运动 B.曲线运动可以是匀速率运动 C.做曲线运动的物体没有加速度 D.做曲线运动的物体加速度一定恒定不变 【例2】同一辆汽车以同样大小的速度先后开上平直的桥和凸形桥,在桥的中央处有( ) A.车对两种桥面的压力一样大 B.车对平直桥面的压力大 C.车对凸形桥面的压力大 D.无法判断 【例3】甲、乙两个物体分别放在南沙群岛和北京,它们随地球一起转动时,下面说法正确的是( ) A.甲的线速度大,乙的角速度小 B.甲的线速度大,乙的角速度大 C.甲和乙的线速度相等 D.甲和乙的角速度相等 【例4】关于圆周运动的下列说法中正确的是( ) A.做匀速圆周运动的物体,在任何相等的时间内通过的位移都相等 B.做匀速圆周运动的物体,在任何相等的时间内通过的路程都相等 C.做圆周运动的物体的加速度一定指向圆心 D.做圆周运动的物体的加速度不一定指向圆心 【例5】下列一些说法中正确的有( ) A.产生离心现象的原理有时可利用为人类服务 B.汽车转弯时要利用离心现象防止事故 C.洗衣机脱水桶脱干衣服,脱水桶的转速不能太小 D.汽车转弯时要防止离心现象的发生,避免事故发生 【例6】如图-1所示,用细绳系着一个小球,使小球在水平面内做匀速圆周运动,不计空气阻力,关于小球受力说法正确的是( ) A.只受重力 B.只受拉力 C.受重力、拉力和向心力 D.受重力和拉力 图-1
【例7】小球质量为m ,用长为L 的轻质细线悬挂在O 点,在O 点的正下方2 L 处有一钉子P ,把细线沿水平方向拉直,如图 -2所示,无初速度地释放小球,当细线碰到钉子的瞬间,设线没有断裂,则下列说法错误的是 ( ) A .小球的角速度突然增大 B .小球的瞬时速度突然增大 C .小球的向心加速度突然增大 D .小球对悬线的拉力突然增大 【例8】如图-4所示,将质量为m 的小球从倾角为θ的光滑斜面上A 点以速度v 0水平抛出(即v 0∥CD ),小球运动到B 点,已知A 点的高度h ,则小球到达B 点时的速度大小为______. . 【例9】(14分)A 、B 两小球同时从距离地面高为h =15m 处的同一点抛出,初速度大小均为v 0=10m/s ,A 球竖直向下抛出,B 球水平抛出,空气阻力不计,重力加速度取g =10m/s 2,求: (1)A 球经多长时间落地(2)A 球落地时,A 、B 两球间的距离是多少 【例10】射击运动员沿水平方向对准正前方100 m 处的竖直靶板射击,第一发子弹射在靶上的A 点,经测量计算,得知子弹飞行速度为500 m/s ,第二发子弹击中A 点正下方5 cm 处的E 点,求第二发子弹飞行速度。(不计空气影响,g =10 m/s 2) 图-2 图-4 图-5
B样条曲线与曲面
四、B 样条曲线与曲面 Bezier 曲线具有很多优越性,但有二点不足: 1)特征多边形顶点数决定了它的阶次数,当n 较大时,不仅计算量增大,稳定性降低,且控制顶点对曲线的形状控制减弱; 2)不具有局部性,即修改一控制点对曲线产生全局性影响。 1972年Gordon 等用B 样条基代替Bernstein 基函数,从而改进上述缺点。 B样条曲线的数学表达式为: ∑=+?= n k n k k i n i u N P u P 0 ,,) ()( 在上式中,0 ≤ u ≤ 1; i= 0, 1, 2, …, m 所以可以看出:B样条曲线是分段定义的。如果给定 m+n+1 个顶点 Pi ( i=0, 1, 2,…, m+n),则可定义 m+1 段 n 次的参数曲线。 在以上表达式中: N k,n (u) 为 n 次B 样条基函数,也称B样条分段混合函数。其表达式为: ∑ -=+--+??-=k n j n j n j n k j k n u C n u N 0 1,)()1(!1)( 式中:0 ≤ u ≤1 k = 0, 1, 2, …, n 1.均匀B 样条曲线 1 一次均匀B 样条曲线的矩阵表示 空间n+1个顶点 i P (i = 0,1,…,n )定义n 段一次(k =0,1,n=1)均匀B 样条曲线,即每 相邻两个点可构造一曲线段P i (u ),其定义表达为: []10 ;,...,1 0111 1)(1≤≤=??? ?????????-=-u n i u u P i i i P P =(1-u )P i -1 + u P i = N 0,1(u )P i -1 + N 1,1(u )P i 第i 段曲线端点位置矢量:i i i i P P P P ==-)1(,)0(1,且一次均匀B 样条曲线就是控制多边 形。
高中物理曲线运动经典练习题全集(答案)
《曲线运动》超经典试题 1、关于曲线运动,下列说法中正确的是(AC ) A. 曲线运动一定是变速运动 B. 变速运动一定是曲线运动 C. 曲线运动可能是匀变速运动 D. 变加速运动一定是曲线运动 【解析】曲线运动的速度方向沿曲线的切线方向,一定是变化的,所以曲线运动一定是变速运动。变速运动可能是速度的方向不变而大小变化,则可能是直线运动。当物体受到的合力是大小、方向不变的恒力时,物体做匀变速运动,但力的方向可能与速度方向不在一条直线上,这时物体做匀变速曲线运动。做变加速运动的物体受到的合力可能大小不变,但方向始终与速度方向在一条直线上,这时物体做变速直线运动。 2、质点在三个恒力F1、F2、F3的共同作用下保持平衡状态,若突然撤去F1,而保持F2、F3不变,则质点(A ) A.一定做匀变速运动B.一定做直线运动 C.一定做非匀变速运动D.一定做曲线运动 【解析】质点在恒力作用下产生恒定的加速度,加速度恒定的运动一定是匀变速运动。由题意可知,当突然撤去F1而保持F2、F3不变时,质点受到的合力大小为F1,方向与F1相反,故一定做匀变速运动。在撤去F1之前,质点保持平衡,有两种可能:一是质点处于静止状态,则撤去F1后,它一定做匀变速直线运动;其二是质点处于匀速直线运动状态,则撤去F1后,质点可能做直线运动(条件是F1的方向和速度方向在一条直线上),也可能做曲线运动(条件是F1的方向和速度方向不在一条直线上)。 3、关于运动的合成,下列说法中正确的是(C ) A. 合运动的速度一定比分运动的速度大 B. 两个匀速直线运动的合运动不一定是匀速直线运动 C. 两个匀变速直线运动的合运动不一定是匀变速直线运动 D. 合运动的两个分运动的时间不一定相等 【解析】根据速度合成的平行四边形定则可知,合速度的大小是在两分速度的和与两分速度的差之间,故合速度不一定比分速度大。两个匀速直线运动的合运动一定是匀速直线运动。两个匀变速直线运动的合运动是否是匀变速直线运动,决定于两初速度的合速度方向是否与合加速度方向在一直线上。如果在一直线上,合运动是匀变速直线运动;反之是匀变速曲线运动。根据运动的同时性,合运动的两个分运动是同时的。 4、质量m=0.2kg的物体在光滑水平面上运动,其分速度v x和v y随时间变化的图线如图所示,求: (1)物体所受的合力。 (2)物体的初速度。 (3)判断物体运动的性质。
高中物理曲线运动典型例题解析
曲线运动及其基本研究方法典型例题精析 [例题1]关于互成角度的两个匀变速直线运动的合运动,下述说法中正确的是[ ] A.一定是直线运动 B.一定是曲线运动 C.一定是匀变速运动 D.可能是直线运动,也可能是曲线运动 [思路点拨] 本题概念性很强,正确进行判定的关键在于搞清物体曲线运动的条件:物体 运动方向与受力方向不在同一直线上.另外题目中“两个匀变速直线运动”并没讲是否有初速 度,这在一定程度上也增大了题目的难度. [解题过程] 若两个运动均为初速度为零的匀变速直线运动,如图5-1(A)所示,则合运动必为匀变速直线运动.
若两个运动之一的初速度为零,另一个初速度不为零,如图5-1(B)所示,则合运动必为曲线运动. 若两个运动均为初速度不为零的匀变速直线运动,则合运动又有两种情况:①合速度v与合加速度a不共线,如图5-1(C)所示.②合速度v与合加速度a恰好共线.显然前者为曲线运动,后者为直线运动. 由于两个匀变速直线运动的合加速度必恒定,故不仅上述直线运动为匀变速直线运动,上述曲线运动也为匀变速运动. 本题正确答案应为:C和D. [小结] 正确理解物体做曲线运动的条件是分析上述问题的关键.曲线运动由于其运动方向时刻改变(无论其速度大小是否变化),必为变速运动.所以曲线运动的物体必定要受到合外力作用,以改变其运动状态.由于与运动方向沿同一直线的力,只能改变速度的大小;而与运动方向相垂直的力,才能改变物体的运动方向.故做曲线运动的物体的动力学条件应是受到与运动方向不在同一直线的外力作用. [例题2] 一只小船在静水中速度为u,若水流速度为v,要使之渡过宽度为L的河,试分析为使渡河时间最短,应如何行驶? [思路点拨] 小船渡河是一典型的运动合成问题.小船船头指向(即在静水中的航向)不同,合运动即不同.在该问题中易出现的一个典型错误是认为小船应按图5-2(A)所示,逆水向上渡河,原因是这种情况下渡河路程最短,故用时也最短.真是这样吗? [解题过程] 依据合运动与分运动的等时性,设船头斜向上游并最终垂直到达对岸所需时间为tA,则
高一物理必修2《曲线运动》典型例题
高一物理必修2《曲线运动》典型例题 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
高一物理必修二曲线运动经典题 1、关于曲线运动,下列说法中正确的是( ) A. 曲线运动一定是变速运动 B. 变速运动一定是曲线运动 C. 曲线运动可能是匀变速运动 D. 变加速运动一定是曲线运动 【解析】AC.曲线运动的速度方向沿曲线的切线方向,一定是变化的,所以曲线运动一定是变速运动。变速运动可能是速度的方向不变而大小变化,则可能是直线运动。当物体受到的合力是大小、方向不变的恒力时,物体做匀变速运动,但力的方向可能与速度方向不在一条直线上,这时物体做匀变速曲线运动。做变加速运动的物体受到的合力可能大小不变,但方向始终与速度方向在一条直线上,这时物体做变速直线运动。 2、质点在三个恒力F 1、F 2、F 3的共同作用下保持平衡状态,若突然撤去F 1,而保持F 2、F 3不变,则质点( ) A .一定做匀变速运动 B .一定做直线运动 C .一定做非匀变速运动 D .一定做曲线运动 【解析】A.质点在恒力作用下产生恒定的加速度,加速度恒定的运动一定是匀变速运动。由题意可知,当突然撤去F 1而保持F 2、F 3不变时,质点受到的合力大小为F 1,方向与F 1相反,故一定做匀变速运动。在撤去F 1之前,质点保持平衡,有两种可能:一是质点处于静止状态,则撤去F 1后,它一定做匀变速直线运动;其二是质点处于匀速直线运动状态,则撤去F 1后,质点可能做直线运动(条件是F 1的方向和速度方向在一条直线上),也可能做曲线运动(条件是F 1的方向和速度方向不在一条直线上)。 3、关于运动的合成,下列说法中正确的是( ) A. 合运动的速度一定比分运动的速度大 B. 两个匀速直线运动的合运动不一定是匀速直线运动 C. 两个匀变速直线运动的合运动不一定是匀变速直线运动 D. 合运动的两个分运动的时间不一定相等 【解析】C.根据速度合成的平行四边形定则可知,合速度的大小是在两分速度的和与两分速度的差之间,故合速度不一定比分速度大。两个匀速直线运动的合运动一定是匀速直线运动。两个匀变速直线运动的合运动是否是匀变速直线运动,决定于两初速度的合速度方向是否与合加速度方向在一直线上。如果在一直线上,合运动是匀变速直线运动;反之,是匀变速曲线运动。根据运动的同时性,合运动的两个分运动是同时的。 4、质量m=0.2kg 的物体在光滑水平面上运动,其分速度v x 和v y 随时间变化的图线如图所示,求: (1) 物体所受的合力。 (2) 物体的初速度。 (3) 判断物体运动的性质。 (4) 4s 末物体的速度和位移。 【解析】根据分速度v x 和v y 随时间变化的图线可知,物体在x 轴上的分运动是匀加速直线运动,在y 轴上的分运动是匀速直线运动。从两图线中求出物体的加速度与速度的分量,然后再合成。 (1) 由图象可知,物体在x 轴上分运动的加速度大小a x =1m/s 2,在y 轴上分运动的加速度为0,故物体的合加速度大小为a=1m/s 2,方向沿x 轴的正方向。则物体所受的合力 F=ma=0.2×1N=0.2N ,方向沿x 轴的正方向。 (2) 由图象知,可得两分运动的初速度大小为 v x 0=0,v y 0=4m/s ,故物体的初速度 2 20200 40+=+=y x v v v m/s=4m/s ,方向沿y 轴正方向。
B样条曲线矩阵
五、B样条曲线的矩阵表示 1)二阶B样条曲线 设空间P0 P1, …., P n为n+1个控制点,节点矢量为其中每相邻两个控制点之间可以构造出一段二阶B样条曲线。其中的第j=i-1段二阶B样条曲线P j(t)的矩阵表示为: ; 其中,。 对于二阶均匀B样条曲线,其矩阵表示与非均匀B样条曲线的相同: 。 2)三阶B样条曲线 给定节点矢量为,n+1个控制点为P0,P1, …., P n。其中每相邻三个点可构造出一段二次的B样条曲线。其中的第j(=i-2)段三阶B样条曲线P j(u)的矩阵表示为: ; 其中, 。 对于三阶均匀B样条曲线,其矩阵表示为 。 三阶均匀B样条曲线的端点位置、一阶导数和二阶导数矢量分别为: P i,3(0)=(P i+P i+1)/2,
P i,3(1)=(P i+1+P i+2)/2; P'i,3(0)= P i+1-P i, P'i,3(1)=P i+2-P i+1, P'i,3(1)=P'i+1,3(0); P''i,3(t)=P i-2P i+1+P i+2 , 三阶均匀B样条曲线的首末点通过相应边的中点;首末点的切矢方向与相应边重合;二阶导数矢量等于该曲线的两条边矢量P i+1-P i和P i+2-P i+1所构成的对角线矢量。 三阶均匀B样条曲线段为抛物线,两相邻曲线段之间为一阶连续。 3)四阶B样条曲线 设节点矢量为,控制点为P0P1, …., P n,其中每相邻四个点可构造出一段三次的B样条曲线。其中的第j(=i-3)段三次B样条曲线P i(u)的矩阵表示为: ;。 其中, , m =-m2,2/3- m3,3-(t i+1-t i)2/[(t i+2-t i)(t i+2-t i-1)],m r,j是第r行第j列的元素。 3,2 第j(=i-3)段三次均匀B样条曲线P j(t)的矩阵表示: 。 三次均匀B样条曲线的端点位置、一阶导数和二阶导矢量分别为: P (0)=(P i+4P i+1+P i+2)/6, i,4 P (1)=(P i+1+4P i+2+P i+3)/6; i,4 P' (0)=(P i+2-P i)/2, i,4 P' (1)= (P i+3-P i+1)/2, i,4 P' (1)= P'i+1,3(0); i,3
曲线运动知识点总结与经典题
曲线运动复习提纲 曲线运动是高中物中的难点,由于其可综合性较强,在高考中常常与其他章节的知识综合出现。因 此,在本章中,弄清各种常见模型,熟悉各种分析方法,是高一物理的重中之重。 以下就本章中一些重、难点问题作一个归纳。 一、 曲线 运动的基本概念中几个关键问题 ① ② ③ ④ 二、 运动的合成与分解 ① 合成和分解的基本概念。 合运动与分运动的关系: ① 分运动具有独立性。 ② 分运动与合运动具有等时性。 ③ 分运动与合运动具有等效性。 ④ 合运动运动通常就是我们所观察到的实际运动。 运动的合成与分解包括位移、速度、加速度的合成与分解,遵循平行四边形定则。 几个结论:①两个匀速直线运动的合运动仍是匀速直线运动。②两个直线运动的合运动,不 线运动(如平抛运动)。③两个匀变速直线运动的合运动, ② 船过河模型 (1) 处理方法:小船在有一定流速的水中过河时,实 际上参与了两个方向的分运动,即随水流的运动 (水 冲船的运动)和船相对水的运动,即在静水中的船的 运动(就 是船头指向的方向),船的实际运动是合运 动。 (2) 若小船要垂直于河岸过河,过河路径最短,应将船头偏向上游,如图甲所示,此时过河时间: t 卫 V | sin (3)若使小船过河的时间最短,应使船头正对河岸行驶,如图乙所示,此时过河时间 因为在垂直于河岸方向上,位移是一定的,船头按这样的方向,在垂直于河岸方向上的速度最大。 ③绳端问题 绳子末端运动速度的分解, 按运动的实际效果进行可以方便我们的研究。 例 如在右图中,用绳子通过定滑轮拉物体船,当以速度 v 匀速拉绳子时,求船 的速度。 船的运动(即绳的末端的运动)可看作两个分运动的合成: a )沿绳的方向被牵引,绳长缩短,绳长缩短的速度等于左端绳子伸长的速度。即为 b )垂直于绳以定滑轮为圆心的摆动,它不改变绳长。这样就可以求得船的速度为 曲线运动的速度方向:曲线切线的方向。 曲线运动的性质:曲线运动一定是变速运动,即曲线运动的加速度 a z 0。 物体做曲线运动的条件:物体所受合外力方向与它的速度方向不在同一直线上。 做曲 线运动的物体所受合外力的方向指向曲线弯曲的一侧。 定是直 ,定是直线运动。 定是匀变速运动,但不 d —(d 为河宽)。 V i _^,当船向左移 cos 乙引 甲
(word完整版)高一物理必修二曲线运动典型例题.doc
一、曲线运动中的变量 1、做曲线运动的物体,在运动过程中一定变化的量是: () A .速率 B. 速度C.加速度 D. 合外力 2、关于做曲线运动物体的速度和加速度,下列说法中正确的是() A.速度、加速度都一定随时在改变 B.速度、加速度的方向都一定随时在改变 C.速度、加速度的大小都一定随时在改变 D.速度、加速度的大小可能都保持不变 3、关于物体做曲线运动,下列说法中,正确的是() A.物体做曲线运动时所受的合外力一定不为零 B.物体所受的合外力不为零时一定做曲线运动 C.物体有可能在恒力的作用下做曲线运动,如推出手的铅球 D.物体只可能在变力的作用下做曲线运动 4、关于运动的性质,下列说法中正确的是:() A.变速运动一定是曲线运动 B.曲线运动一定是变加速运动 C.曲线运动一定是变速运动 D.物体加速度数值,速度数值均不变的运动一定是直线运动 二、由运动轨迹判断所受合力的方向 1、一个质点在恒力作用下,在xoy 平面内从 o 点运动到 A 点的轨迹如图,且在 A 点时的速度方向与x 轴平行,则恒力 F 的方向不可能的是:() A. 沿 +x 方向y A B.沿 -x 方向 C.沿 +y 方向 D.沿 -y 方向o x 2、质点做曲线运动,它的轨迹如图所示,由 A 向 C 运动,关于它通过 B 点时的速度 v 的方向和加速度 a 的方向正确的是:() 3、一个物体在光滑水平面上以初速度v 做曲线运动,已知物体在运动过程中只受水平恒力的作用,其运动轨迹如图, 则物体由 M 点运动到N 点的过程中,速度的大小变化情况是:() A .逐渐增加 B .逐渐减小 N C.先增加后减小D.先减小后增加 V M 三、由分运动判断合运动的轨迹 1、若一个物体的运动是两个独立的分运动合成的,则:() A.若其中一个分运动是变速直线运动,另一个分运动是直线运动,则物体的合运动一定是变速运动 B.若两个分运动都是匀速直线运动,则物体的合运动一定是匀速直线运动 C.若其中一个分运动是匀变速直线运动,另一个分运动是匀速直线运动,则物体的运动一定是曲线运动 D.若其中一个分运动是匀加速直线运动,另一个分运动是匀速直线运动,合运动可以是曲线运动