飞行器控制系统设计与仿真实验平台的构建_刘根旺
第27卷第3期 2008年3月
实验室研究与探索
RESEARC H AND EX PLORAT I ON I N LABORATORY
Vo.l 27N o .3
M ar .2008
#仪器设备研制与开发#
飞行器控制系统设计与仿真实验平台的构建
刘根旺
(电子科技大学空天科学技术研究院,四川成都610054)
摘 要:针对导航、制导与控制专业研究生的教学实验与科研的需要,设计构建了飞行器控制系统设计
与仿真实验平台,该平台综合了多学科知识和多种先进技术手段,可以用于飞行器的组合导航与精确制导系统以及飞行器姿态控制系统的设计与仿真,具有综合多样的实验功能。
关键词:飞行器;控制系统;仿真;实验平台
中图分类号:V249 文献标识码:A 文章编号:1006-7167(2008)03-0026-03
Buil d i n g of Experm i ent al P l a tf or m f or A ir cr aft Control
Syste m Desi g n and Sm i ul a ti o n
LIU G en-w ang
(I nstitute of Astronauti c s&A eronautics ,Un i v ersity of E lectr onic Science &Techno logy o f China ,Chengdu 610054,Ch i n a)
Abst ract :Consi d eri n g teaching and experi m ent and research for postgraduates m a jori n g i n nav igati o n ,guidance and contro,l an experi m enta l platfor m for a ircraft contr o l syste m design and si m u lation w as deve l o ped .The bu il d i n g o f t h is platfor m synthesizes kno w ledge o f several subjects and a lot of advanced techniques .It can be used for t h e design and si m ulation o f a ircraft i n tegrated nav iga ti o n and precisi o n guidance syste m and attitude contro l syste m.It has m u ltiple
f u nctions i n teach i n
g ,experi m ent and research.K ey w ords :a ircraf;t contro l syste m ;si m u lation ;experi m ental p latfor m
CLC nu m ber :V249 Docu m ent code :A Ar ticle I D:1006-7167(2008)03-0026-03
收稿日期:2007-05-11
作者简介:刘根旺(1974-),男,河北人,讲师,博士,研究方向为导航、制导与控制。Te:l 135********;E-m ai:l abb aabba @126.co m
1 引 言
飞行器控制系统作为飞行器的神经中枢,其可靠性、稳定性及精确度是飞行器安全飞行和执行任务成功与否的重要保障。为保证飞行器的飞行航迹及打击目标的准确性,对其在飞行过程中数据实时处理的要求越来越高,算法也越来越复杂。建立飞行器控制系统设计与仿真实验平台可以为飞行器的数字化设计及设计过程中的数字仿真与半实物仿真实验提供条件。本实验平台的构建以电子科技大学空天科学技术研究院的建立为背景,主要目的是为导航、制导与控制专业及相关专业研究生的培养和用于先进的导航、制
导与控制理论和技术的科研工作提供实验条件。
2 设计思想
首先,飞行器控制系统设计与仿真实验平台要综合考虑导航、制导与控制专业的主要课程设置,能够用于组合导航、精确制导、飞行器控制系统原理和飞行器设计等课程的教学和实验演示。
其次,该实验平台还要充分体现飞行器控制系统的特点,满足飞行器控制系统设计与仿真要求。能够用于飞行器控制系统及其各分系统的设计,并且能够为飞行器控制系统中的算法设计乃至系统集成设计提供数字仿真和半实物仿真条件。
此外,该实验平台的建设还要具有独立的专业特
色,并且服务于学校重点实验室建设,进而成为学校学科建设和发展的重要支撑。
该实验平台的构建是基于教学和科研的目的,其
主要落脚点还在于培养航空航天领域的高素质专业人才。主要面向研究生培养,通过该平台既能够使学生在学习理论之前先对飞行器控制系统有一个完整的感性认识,帮助学生熟悉和掌握飞行器控制系统的组成、各部分的特点,使其了解飞行器在飞行过程中控制系统的作用与工作方式,又能够激发学生学习专业知识的兴趣,培养其创新性思维和探索精神。在研究生的课题研究过程中,该平台有助于提高其工程实践能力,培养其综合能力以及工程设计能力,为其以后从事科研工作打下坚实的基础。
3 实验平台设计
3.1 总体设计
飞行器控制系统通常包含制导系统和姿态控制系统以及执行机构几个部分组成。飞行器在飞行过程中,制导系统给出当前飞行轨迹与目标或理论轨迹的偏差,控制器根据此偏差计算出整个飞行器应有的飞行姿态,产生飞行控制指令,执行机构产生舵面转动或偏航推力,在保证飞行器姿态稳定的前提下,通过改变飞行器的飞行姿态以修正飞行器的飞行轨迹。
制导系统负责当前轨迹与目标或理论轨迹的偏差计算。制导方式有多种,包括最基本的惯性制导以及GPS 制导、红外制导、激光制导、毫米波制导等,为提高制导精度,通常采用两种或两种以上的制导方式来组成复合制导系统。因此制导系统一般是对应以上工作原理的各种传感器组件。
控制系统负责处理制导系统的反馈信息并解算飞行控制参数。目前这一部分多采用基于M C U,DSP 和FPGA 构成的嵌入式数字控制装置。
飞行器的执行机构接受来自控制器产生的控制指令,产生电动舵机或燃气舵机等执行机构的作动,从而产生俯仰/偏航力或力矩,改变弹体的飞行姿态,最终改变飞行轨迹。
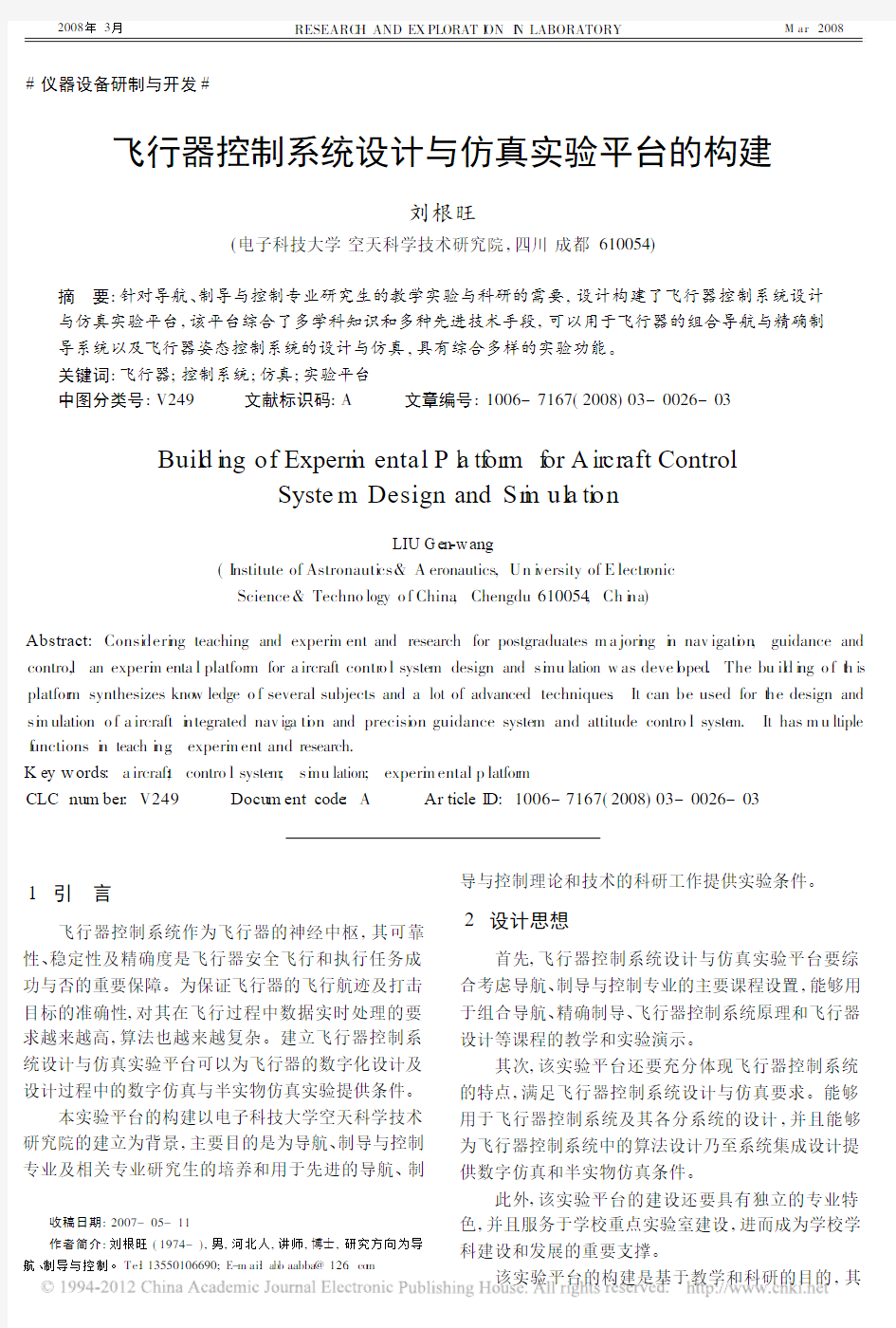
根据上述飞行器控制系统的工作原理,本实验平台的设计主要包括组合导航与精确制导仿真实验平台和飞行器姿态控制系统设计与仿真平台两大部分,统一构建成用于飞行器控制系统设计与仿真的半实物仿真实验平台。3.2 飞行器控制系统半实物仿真实验平台设计原理
半实物仿真是利用数学模型替代部分真实的物理部件进行系统性能研究的方法。半实物仿真一般使用专门设计的计算机作为数学模型平台运行的平台,上面运行着那些不易或是不便采用真实设备部分的数字动态仿真模型。这个仿真计算机平台同时还具有将数字计算量转化为真实电信号或是将外界的电气信号转变为计算数字量的I /O 接口设备,以实现数学模型与
仿真平台以外真实物理系统之间的相互作用。见
图1。
图1 半实物仿真实验平台设计原理
本飞行器控制系统半实物仿真实验平台以MAT -LAB 为软件平台进行设计。当采用MATLAB 进行控制系统设计时,系统中所有的环节都通过S i m uli n k 动态模型仿真进行检验。各个子系统利用MATLAB 的各种专业工具箱独立分析和设计。设计过程中各分系统随时可以将各自的S i m ulink 模型部分集成起来运行,根据时域计算结果评价分系统的设计并协调改动。由于使用S i m u li n k 仿真模型作为设计信息载体,无需依赖真实的产品设备就可以测试分系统,或是各系统集成测试。
在本仿真实验平台中,数学仿真模型代码通常在更底层的实时操作系统(RTOS)控制下运行并通过硬件I/O 接口与外界进行数据交流。实时操作系统保证了数学模型的动态特性与所模拟的实物系统具有相同的时域特性。3.3 组合导航与精确制导仿真实验平台
在飞行器导航制导系统中,为了实现更为精确的控制目的,常常采用多种模式的导航制导系统构成组合导航或复合制导系统,这在很大程度上增加了导航制导系统的复杂性。系统复杂度的增加相应地对飞行器飞行过程中数据的实时处理提出了越来越高的要求,而算法也会变得越来越复杂。因此只有实现了数据处理的实时性并解决了算法的复杂性才能够有效保证飞行器飞行航迹以及打击目标的准确性。
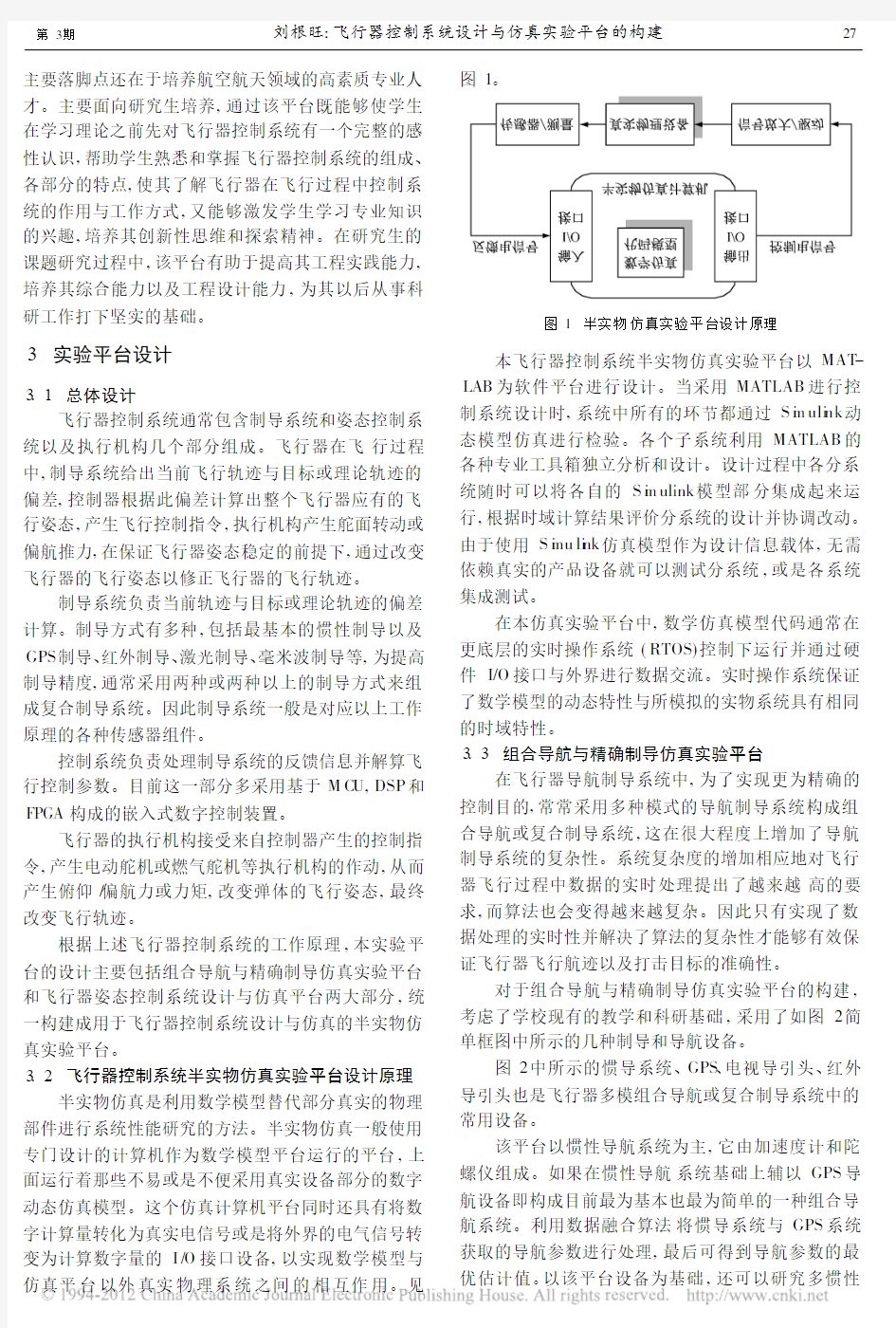
对于组合导航与精确制导仿真实验平台的构建,考虑了学校现有的教学和科研基础,采用了如图2简单框图中所示的几种制导和导航设备。
图2中所示的惯导系统、GPS 、电视导引头、红外导引头也是飞行器多模组合导航或复合制导系统中的常用设备。
该平台以惯性导航系统为主,它由加速度计和陀螺仪组成。如果在惯性导航系统基础上辅以GPS 导航设备即构成目前最为基本也最为简单的一种组合导航系统。利用数据融合算法将惯导系统与GPS 系统获取的导航参数进行处理,最后可得到导航参数的最优估计值。以该平台设备为基础,还可以研究多惯性
27
第3期
刘根旺:飞行器控制系统设计与仿真实验平台的构建
图2 组合导航与精确制导仿真实验平台
组合组成的冗余式导航与制导系统,也可以研究惯导/GPS 与红外、毫米波、微波、电视、激光、地形匹配等其它导航/制导方式组成的组合导航或复合制导系统。此外,在该平台基础上,还可以进行多源数据融合技术、复杂导航及制导算法等的研究。3.4 飞行器姿态控制系统设计与仿真平台
飞行器姿态控制系统设计与仿真平台的构成如图3
所示。
图3 飞行器姿态控制系统设计与仿真平台
图中dSPACE 是dSPACE 公司开发的高性能的实时仿真软硬件平台,该实时仿真系统与MATLAB /S i m -u li n k 无缝集成,可直接将使用MATLAB /S i m u li n k 搭建的各分系统数学模型下载到其硬件平台上实时运行,可以实时地反映各分系统在不同条件下的行为特性。同时,dSP ACE 系统具有丰富的真实物理接口,可
将各种特性通过不同类型的信号对外输出,因而可进行真实设备的物理连接协同仿真,即可完成半物理仿真的功能。dSPACE 实时系统具有实时性强,可靠性高,扩充性好等优点。系统采用高速处理器,计算能力强且支持并行运算,可构成并行处理机制来对大型计算实施分布式计算,达到并行计算的功能。系统配备了丰富的I/O 支持,可以根据需要进行组合;软件环境的功能强大且使用方便,包括实现代码自动生成、下载和试验、调试的整套工具。
控制系统S i m u li n k 模型可以自动生成代码,运行在dSP ACE 平台上。通过dSPACE 硬件平台上的物理接口(A /D,D /A,DI O,M il1553等),模型所生成的代码就处理真实的物理设备的信号,实现与最终产品同等的功能。实验过程中,通过dSPACE 的监控软件界面可以在线观察系统中所有工作环节的数据。经过验证所确认的设计,用于产品开发时可能出现的问题就会大大减少,可以加快研发进程并确保设计质量。
平台中的飞行动力学仿真主要用于转台控制。由
于没有实际飞行过程,需要利用数学模型计算飞行器实际使用时的飞行轨迹,并解算出飞行器在实际飞行中的姿态。外接多轴转台通过dSPACE 运行平台的硬件接口接受这些信息,并产生相应的转动,体现出飞行器的飞行姿态。这时,与多轴转台固定连接的惯导系统就可以测量得到飞行器的姿态,处理后反馈给控制系统部分。因为使用了转台模拟,惯导系统的工作状态可以做到与实际使用条件基本一致。
在利用该平台进行设计和仿真的过程中,使用模型仿真的方法模拟产生GPS 信号,供姿态控制系统参考使用。另外,对于执行机构等不便于在实验室进行试验的系统,也可以用模型仿真的形式来处理。
4 结 语
飞行器控制系统设计与仿真实验平台构建是导航、制导与控制学科及相关学科建设的重要内容,它不仅能够满足飞行器控制系统设计与仿真的要求,在航空航天领域的科研中发挥重要作用,还丰富了研究生培养中教学实验的内容、方法与手段,有利于培养研究生分析问题和解决问题的能力,有助于造就一批具有/自我意识0、/竞争意识0、/创新意识0的/开拓型0、
/综合型0、/创造型0的航空航天领域的高素质人才。参考文献(R eferences):
[1] 李洪儒,冯振声.大型飞行器制导与姿态控制联合仿真建模研究
[J].军械工程学院学报,2000,12(3):29-34.
[2] 郭振云.再入机动飞行器的控制系统设计[J].飞行力学,2005,
23(1):61-64.
[3] 赵 龙.基于高速局域网的组合导航/制导仿真技术研究[J].系
统仿真学报,2006,18(7):1840-1843.
[4] 马晓志.飞行仿真平台及其平台管理集成一体化研究[D].南京
航空航天大学,2006.
[5] 廖 瑛,王 京.某巡航式飞行器控制系统设计与仿真[J].国防
科技大学学报,2001,23(6):24-27.
[6] 赵书华.油品储运实验平台的设计与实现[J ].实验室研究与探
索,2006,25(6):621-623.
[7] 龙 玲.高等学校数字化实验室的功能设计[J].实验室研究与
探索,2004,23(9):24-25.
[8] 张 乐.仪器设备和实验资源共享平台构建方法初探[J].实验
室研究与探索,2006,25(8):1024-1027.
28
实 验 室 研 究 与 探 索
第27卷
法学虚拟仿真实训平台软件
法源法律实务综合模拟软件 一、产品名称及规格型号 法源法律实务综合模拟软件V1.0 二、产品说明 (一)系统介绍 法源法律实务综合模拟软件是完全模拟诉讼实务中的程序和标准的法律案件审理程序的整个过程的一套训练系统。系统覆盖现今所有法律机构办案流程,通过模拟了解法院、检察院、公安机关、仲裁、行政机构如何进行案件审理,以及在整个诉讼、侦查等过程中,如何去实现自己的诉讼权利等等。系统内置的业务涉及法院、检察院、公安侦查、仲裁、行政复议(处罚)、调解的四十余种诉讼与非讼业务流程。 (二)系统价值 1、通过软件的案件和流程设置,学生通过模拟了解法院、检察院、公安机关、仲裁、行政机构如何进行案件审理,以及在整个诉讼、侦查等过程中,如何去实现自己的诉讼权利等等。 2、软件内置的业务涉及法院、检察院、公安侦查、仲裁、行政复议(处罚)、调解等。 3、软件内置的教学案例为真实的案例,并且在教师端可以进行自由添加删除修改。所谓的真实案例是该案件要求附带整套证据扫描件。 4、教师端可以进行实时庭审的监控以及对实验的所有学生进行实验进度的监控和评分。 5、管理员端可以进行班级、账号的添加,可以对软件的数据进行添加修改(如添加视频)。 6、学生端可以完成老师安排的实验也可以自行添加实验进行练习(实验的业务详见参数),可以进行单人多角色模式和多人互动模式进行操作,庭审中即可用语言视频操作也可以用文字录入模式进行操作。 7、业务流程以流程图式和 flash两种方式嵌入,即让学生和教师快速清楚了解诉讼侦查等业务的整个概况,又增加了趣味性。
8、考核功能:具有主观与自动评分相结合来(实验完成的时间、完成程度、教师预先设定的实验要求)考核学生的整个实验。 9、诉讼流程:系统用流程图跟踪颜色变动方式来显示,可以清楚直观的显示学生的实验情况,以及教师对其的监控。 10、实验数据:实验数据可以在教师端口导出所有学生的所有已完成实验的案件文书,可保存WORD打印。 11、软件数据: (1)真实案件 50 例; (2)文书模版:内置 1400 份各类型的法律文书模板; (3)司法案例,内置上千例司法案例、两高公报等; (4)合同模板:内置上千份合同模板库。 (5)法律法规:内置40余万的法律法规、司法解释等 12、软件为B/S架构网络版,客户端没有站点限制。 三、系统优势 A功能: 1、操作模式: 单人模式:单帐号扮演案件中的所有角色,让学生独立完成实验,方便其熟悉诉讼中的每个环节。 多人模式:多帐号互动扮演案件中的角色,让学生之间互动操作来配合完成实验,可根据分析案情、证据、焦点等全面提高法律技能。 2、实验流程: (1)法院: 民事诉讼 A民事一审程序、B民事一审反诉程序、C民事二审程序、D民事非诉特别程序:督促程序、E民事非诉特别程序:公示催告程序F民事非诉特别程序:企业破产程序、G民事特别程序:选民资格案件程序H民事特别程序:宣告公民失踪和宣告公民死亡案件程序、I民事特别程序:认定公民无行为能力或者限制行为能力案件程序、J民事特别程序:认定财产无主案件程序K民事特别程序:宣告婚
模电仿真实验 共射极单管放大器
仿真实验报告册 仿真实验课程名称:模拟电子技术实验仿真仿真实验项目名称:共射极单管放大器 仿真类型(填■):(基础■、综合□、设计□) 院系:专业班级: 姓名:学号: 指导老师:完成时间: 成绩:
一、实验目的 (1)掌握放大器静态工作点的调试方法,熟悉静态工作点对放大器性能的影响。 (2)掌握放大器电压放大倍数、输入电阻、输出电阻及最大不失真输出电压的测试方法。 (3)熟悉低频电子线路实验设备,进一步掌握常用电子仪器的使用方法。 二、实验设备及材料 函数信号发生器、双踪示波器、交流毫伏表、万用表、直流稳压电源、实验电路板。 三、实验原理 电阻分压式共射极单管放大器电路如图所示。它的偏置电路采用(R W +R 1)和R 2组成的分压电路,发射极接有电阻R 4(R E ),稳定放大器的静态工作点。在放大器的输入端加入输入微小的正弦信号U i ,经过放大在输出端即有与U i 相位相反,幅值被放大了的输出信号U o ,从而实现了电压放大。 在图电路中,当流过偏置电阻R 1和R 2的电流远大于晶体管T 的基极电流I B 时(一般5~10倍),则它的静态工作点可用下式进行估算(其中U CC 为电源电压): CC 21W 2 BQ ≈ U R R R R U ++ (3-2-1) C 4 BE B EQ ≈I R U U I -= (3-2-2) )(43C CC CEQ R R I U U +=- (3-2-3) 电压放大倍数 be L 3u ||=r R R β A - (3-2-4) 输入电阻 be 21W i ||||)(r R R R R += (3-2-5) 图 共射极单管放大器
一站式虚拟实验平台的设计与建设
一站式虚拟实验平台的设计与建设 摘要:本文提出一站式虚拟实验平台设计与建设方案,利用现代信息技术搭建一个集教、学、考于一体的一站式虚拟实验平台,为开放性实验教学和优质教学资源的建设提供平台。该平台具有教学过程和教学资源的“整合性”与“共建共享性”等特点。实践证明,该实验平台能整合职业院校多种专业的实验“教”与“学”资源,为学生多样化的技能训练提供较全面的一体化实践平台,同时提高了优质信息化资源的覆盖率和利用率。 关键词:教育信息化;共建共享;虚拟实验平台 中图分类号:TP311.56 文献标志码:B 文章编号:1673-8454(2016)07-0074-04 一、引言 与普通教育不同,职业教育以就业为导向,具有专业性、实践性、应用性、操作性、技能性等特点[1]。其中,技能教育是职业教育的核心。而当前的职业教育中,存在以下的问题: (1)实验实训设备昂贵,数量有限,损耗比较严重并且型号落后,更新换代难以跟上科技发展的步伐。而社会对技能型人才的需求使得职业院校不断扩招。这就造成了有限
的实验资源与大规模学生的教学需求之间的矛盾。 (2)教学过程中涉及高危或极端环境的技能操作,如核电站、矿井采煤等专业操作,涉及不可及或不可逆条件下的操作,如心脏搭桥手术,煤制乙炔工艺,以及一些高成本、高消耗、大型综合操作训练,如船舶建造、飞机发动机的装配等缺乏有效的实训资源,无法经常开展实训。 (3)受课程内容影响,配套的实验实训或“片段式”的企业案例使学生只注重专项技能训练,忽略了对行业整体技能的培训。“只顾埋头拉车,不会抬头看路”导致学生缺乏行业性思维,就业灵活性和适应性大大降低。另外,目前的教学资源存在着分散和不连贯的现象和缺乏信息化和体系化的建设,导致其不能形成一个有机整体,甚至某些优秀教学资源没能传承下去和被持续地应用。 (4)现有的实验实训无法及时跟踪、反馈学生的实践结果,加上评价体系单一,缺乏让学生不断修正、提高和完善的阶段性建议和步骤。 以上原因造成学生缺乏兴趣,积极性不高,动手实践能力差等问题,与职业教育提高学生职业技能,培养学生职业素养的初衷不一致[2]。 二、一站式虚拟实验平台的设计方案 通过信息技术与教育过程、内容、方法和质量评价深度融合,提高实习实训、项目教学、案例分析、职业竞赛和技
模电仿真实验报告。
模拟电路仿真实验报告 张斌杰生物医学工程141班 MUltiSim软件使用 一、实验目的 1、掌握MUltiSim软件的基本操作和分析方法。 二、实验内容 1、场效应管放大电路设计与仿真 2、仪器放大器设计与仿真 3、逻辑电平信号检测电路设计与仿真 4、三极管Beta值分选电路设计与仿真 5、宽带放大电路设计与仿真 三、MUItiSim软件介绍 MUItiSim是美国国家仪器(NI)有限公司推出的以WindOWS为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。工程师们可以使用MUItiSinl交互式地搭建电路原理图,并对电路进行仿真。MUltiSiIn提炼了SPICE 仿真的复杂内容,这样工程师无需懂得深入的SPlCE技术就可以很快地进行捕获、仿真和分析新的设计,这也使其更适合电子学教育。通过MUItiSiIn和,PCB设计工程师和电子学教育工作者可以完成从理论到原理图捕获与仿真再到和测试这样一个完整的综合设计流程。 实验名称:
仪器放大器设计与仿真 二、实验目的 1、 掌握仪器放大器的设计方法 2、 理解仪器放大器对共模信号的抑制能力 3、 熟悉仪器放大器的调试功能 4、 掌握虚拟仪器库中关于测试模拟电路仪器的使用方法,如示波器,毫伏 表信 号发生器等虚拟仪器的使用 三、设计实验电路图: 四、测量实验结果: 出为差模放大为399mvo 五、实验心得: 应用MUIti S im 首先要准备好器件的PSPiCe 模型,这是最重要的,没有这个 东西免谈,当然SPiCe 高手除外。下面就可以利用MUItiSinl 的元件向导功 能制作 差模分别输入信号InW 第二条线与第三条线: 共模输入2mv 的的电压,输出为2mv 的电压。 第一条线输
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
虚拟仿真实验教学中心平台建设方案
湖北警官学院虚拟仿真实验教学建设方案 一、方案背景 虚拟仿真实验教学是高等教育信息化建设和实验教学示范中心建设的重要内容,是学科专业与信息技术深度融合的产物。为贯彻落实《教育部关于全面提高高等教育质量的若干意见》(教高〔2012〕4号)精神,根据《教育信息化十年发展规划(2011-2020年)》,教育部决定于2013年启动开展国家级虚拟仿真实验教学中心建设工作。其中虚拟仿真实验教学的管理和共享平台是中心建设的重要内容之一。 目前,大多数高校都有针对课程使用实验教学软件,但由于每个专业或课程的情况不同,购买的软件所采用的工作环境、体系结构、编程语言、开发方法等也各不相同。由于学校管理工作的复杂性,各校乃至校内各专业的实验教学建设大都自成体系,各自为政,形成了“信息孤岛”。主要面临如下问题:? 管理混乱,各种实验教学软件缺乏统一的集中管理。 ? 使用不规范,缺乏统一的操作模式和管理方式; ? 可扩展性差,无法支持课程和相应实验的扩展; ? 各系统的数据无法共享,容易形成“信息孤岛”; ? 缺乏足够的开放性; ? 软件部署复杂,不同的软件不能运行在同一台服务器上; 二、方案目标 该方案的目标就是高效管理实验教学资源,实现校内外、本地区及更广范围内的实验教学资源共享,满足多地区、多学校和多学科专业的虚拟仿真实验教学的需求。平台要实现学校购置的所有实验软件统一接入和学生在平台下进行统一实验的目的,通过系统间的无缝连接,使之达到一个整体的实验效果,学校通过该平台的部署,不仅可以促进系统的耦合度,解决信息孤岛的问题,还可以使学校能够迅速实施第三方的实验教学软件。 平台提供了全方位的虚拟实验教学辅助功能,包括:门户网站、实验前的理论学习、实验的开课管理、典型实验库的维护、实验教学安排、实验过程的智能指导、实验结果的自动批改、实验成绩统计查询、在线答疑、实验教学效
复杂过程控制系统设计与Simulink仿真
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
基于云计算的虚拟仿真实验平台设计
龙源期刊网 https://www.360docs.net/doc/f68343558.html, 基于云计算的虚拟仿真实验平台设计 作者:崔连敏 来源:《软件导刊》2015年第11期 摘要摘要:针对高校虚拟仿真实验平台存在的重复投入、资源无法共享等问题,探讨云计算及其特点,提出基于云计算的虚拟仿真实验平台的架构模型,设计基于云计算的虚拟仿真实验平台,并介绍实验平台的功能和特点。 关键词关键词:云计算;虚拟仿真;实验平台;平台设计 DOIDOI:10.11907/rjdk.151843 中图分类号:TP302 文献标识码:A文章编号文章编号:16727800(2015)011000602 基金项目基金项目:上海市青年教师资助计划(1014204804);上海市教委重点课程项目(2015);2015年度上海理工大学“精品本科”教学改革项目(2015-JPBKZ-017) 作者简介作者简介:崔连敏(1988-),女,河南新乡人,硕士,上海理工大学实验室管理与服务中心助理实验师,研究方向为物理实验、信息技术。 0引言 虚拟仿真实验利用计算机网络技术和多媒体技术,通过计算机模拟实际实验操作,演示实验中的图形、文字、数据等信息。虚拟仿真实验打破了传统实验教学课时有限、场地固定等限制,提升了实验教学效果。随着信息技术和虚拟现实技术的发展,国内很多高校都建设了虚拟仿真实验室。然而许多高校建设虚拟仿真实验室时存在硬件重复投入、服务器闲置率高、建设及维护成本高、数据资源无法共享等问题。云计算技术被认为是一项继个人电脑、互联网技术后的信息技术革命性的新技术,在诸多领域都得到应用。借助云计算技术搭建虚拟仿真实验平台,对校内各实验中心的虚拟仿真实验平台统一部署和维护,能够整合硬件和软件资源,降低平台开发和搭建成本,实现信息资源共享。 1云计算虚拟仿真平台的优势 云计算是分布计算、并行计算、网络存储、虚拟化、负载均衡和热备份冗余等传统计算和网络技术发展融合的产物。云计算致力于解决网络平台的通讯、存储和资源利用等问题。自2006年Google公司首席执行官首次提出云计算的概念以来,云计算技术发展十分迅速。目前Google、IBM、亚马逊、微软、SUN等国际化大公司纷纷推出了自己的云计算平台,国内华为、阿里巴巴、腾讯、百度等也相继启动了云计算项目。典型的云计算架构分为基础设施层、
建筑工程仿真实训平台
建筑工程虚拟仿真实训平台 三好建筑工程仿真实训平台GS2013 一、概述 三好建筑工程仿真实训平台2013,是以Unity3D为平台,结合当前最为流行的三维仿真技术,专门为开设有建筑类专业的中、高等院校而开发,以解决建筑类专业学生的实习实训任务为目标而打造的一款综合性系统软件。整个软件以当前施工现场流行的施工工艺和施工管理为主线,以真实的施工项目为背景而开发,人机交互加三维场景,将整个建筑工程搬进实训室,使学生身临其境,不出校门,即可完成实习、实训任务。从而达到学校育人和企业用人的无缝对接。 现阶段院校建筑类专业课程授课过程中所存在的情景教学资源少、实训操作场地局限、实训操作道具成本较高、重复利用率低等情况,以及学生就业方向对技能的要求,分模块化配套建筑信息化教学课改的专业核心内容,进行虚拟操作体验,从而达到理论结合实践,实践贴近实际的效果。对于提高建筑行业整体水平有较高的指导性和先进性,对提高行业综合实力意义重大。
二、系统介绍 1、功能特点 (1)实现施工管理流程与施工工艺流程同步仿真; (2)场景符合安全文明标化工地要求; (3)菜单形式显示施工任务流程,该任务过程中任意跳转; (4)资料库功能,仿真项目实施过程中所涉及到的图纸、施工方案、各种记录以及其他文件资料。 (5)多视角切换(可根据施工的不同程度,多方位、多视角查看施工情况);
(6)地图热点,实现三维漫游时的不同场景的快速跳转; (7)远近镜头调整; (8)智能语音提示功能,使得整个软件在运行过程中,更加生动形象。 (9)教学模式顺序展示; (10)仿真模式实现交互; (11)考评模式完成考核;理论考试与实务操作相结合,并记录成绩,更科学,更客观的评价学生对实际知识和技能的掌握情况。 (12)丰富的视频; (13)三维漫游功能。 2、专业实现 (1)真实还原施工现场、仿真展示、交互式操作; (2)平台包含典型案例工程、配套实训图纸、《实训任务书》、内业资料、施工管理流程、施工工艺流程; (3)典型工程案例(该工程包含地下室,地上为框支剪力墙、剪力墙结构),囊括现行施工工艺流程;现实生活中的真实项目,项目建筑面积不低于50000平米,楼高不低于50米。 (4)包含各阶段施工图纸、施工方案、技术交底、安全交底,并同步生成工程配套的各种技术资料和施工记录;
自动控制原理及系统仿真课程设计
自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院
2013年11月
目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28)
自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)(
①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s
模电仿真实验1
实验1:EWB仿真软件练习 ——晶体三极管放大电路特性研究 一、实验内容 1. 创建如图1.1所示的实验电路,并为元器件标识,参数设置。 2. 测量静态工作点I BQ、I CQ、U CEQ,用示波器测量电压放大倍数U A,用波特图仪测量频率特性,测量通频带BW。 3. 调节Rp1、Rp2 ,用示波器观察因工作点的改变而引起的输出波形失真。重新调节Rp1、Rp2恢复原值,使波形失真消除。 4.利用参数扫描功能,分析Co从0.1μF到100μF变化时对f1的影响。 二、仿真实验 1. 创建电路, 给电路中的全部元器件按图要求标识,参数设置,然后单击Circuit/Schematic Options出现对话框,在“Display”选项框内,勾选“Show Notes”,这时EWB 自动给各节点编号,并显示在电路图上。 图1.1 晶体三极管放大电路特性研究实验电路 2. 给虚拟仪器设置参数 电压表 Mode:DC Resistance:100MΩ(考虑三级管输入电阻较高,为减小误差取高内阻)
电流表 Mode:DC Resistance:取默认值1nΩ 函数发生器 波形:正弦波 Frequency:1KHz Duty cycle:50% Amplitude:50mV Offset:0 示波器 Time base:0.50ms/div “X/T”显示方式 Channel A:50mV/div y position:0.00 “AC”工作方式 Channel B:500mV/div y position:0.00 “AC”工作方式 Trigger:“Auto”方式 Channel A 输入线设为黑色,Channel B输入线设为红色,则输入信号波形为黑色,输出信号波形为红色。 波特图仪 幅频特性 Vertical: log F:60dB I:0dB Horizontal: log F:1GHz I:1Hz 相频特性 Vertical: log F:360度 I: -360度 Horizontal: log F: 1GHz I: 1Hz 3. 单击“O/I”开关,运行电路,再单击“Parse”按钮,暂停运行。 ⑴. 从电压表、电流表读出静态工作点的值为: I B=19.76μA I C=2.064mA V CE=V C-V E=9.940V-1.102V=8.838V ⑵. 双击示波器图标,打开示波器面板,单击“Expand“扩展面板,观察到波形如图1.2,拖拽读数指针,测得: U A=V OP—P / V IP—P =-1.3674V / 98.196mV=-13.9 图1.2 输入输出电压波形
模拟电子线路multisim仿真实验报告
MULTISIM 仿真实验报告
实验一单级放大电路 一、实验目的 1、熟悉multisim软件的使用方法 2、掌握放大器的静态工作点的仿真方法,及对放大器性能的影响。 3、学习放大器静态工作点、电压放大倍数,输入电阻、输出电阻的仿真方法,了解共 射级电路的特性。 二、虚拟实验仪器及器材 双踪示波器信号发生器交流毫伏表数字万用表 三、实验步骤 1.仿真电路图 V1 10mVrms 1kHz 0° R1 100kΩ Key=A 10 % R2 51kΩ R3 20kΩ R4 5.1kΩ Q1 2N2222A R5 100Ω R6 1.8kΩ C1 10μF C2 10μF C3 47μF 3 7 V2 12 V 4 5 2 1 R7 5.1kΩ 9 XMM1 6 E级对地电压25.静态数据仿真
仿真数据(对地数据)单位;V计算数据单位;V 基级集电极发射级Vbe Vce RP 2.834 6.126 2.2040.63 3.92210k 26.动态仿真一 1.单击仪表工具栏的第四个,放置如图,并连接电路。 V1 10mVrms 1kHz 0° R1 100kΩ Key=A 10 % R2 51kΩ R3 20kΩ R4 5.1kΩ Q1 2N2222A R5 100Ω R6 1.8kΩ C1 10μF C2 10μF C3 47μF 3 7 V2 12 V 4 5 2 R7 5.1kΩ XSC1 A B Ext Trig + + _ _+_ 6 1 9
2.双击示波器,得到如下波形 5.他们的相位相差180度。 27.动态仿真二 1.删除负载电阻R6 V1 10mVrms 1kHz 0° R1 100kΩ Key=A 10 % R2 51kΩ R3 20kΩ R4 5.1kΩ Q1 2N2222A R5 100Ω R6 1.8kΩ C1 10μF C2 10μF C3 47μF 3 7 V2 12 V 4 5 2 XSC1 A B Ext Trig + + _ _+_ 6 1 9 2.重启仿真。
模电实验报告
模拟电子技术基础实验报告 姓名:蒋钊哲 学号:2014300446 日期:2015.12.21
实验1:单极共射放大器 实验目的: 对于单极共射放大电路,进行静态工作点与输入电阻输出电阻的测量。 实验原理: 静态工作点的测量是指在接通电源电压后放大器输入端不加信号(通过隔直电容将输入端接地)时,测量晶体管集电极电流I CQ和管压降V CEQ。其中集电极电流有两种测量方法。 直接法:将万用表传到集电极回路中。 间接法:用万用表先测出R C两端的电压,再求出R C两端的压降,根据已知的R E的阻值,计算I CQ。 输出波底失真为饱和失真,输出波顶失真为截止失真。 电压放大倍数即输出电压与输入电压之比。 输入电阻是从输入端看进去的等效电阻,输入电阻一般用间接法进行测量。 输出电阻是从输出端看进去的等效电阻,输出电阻也用间接法进行测量。 实验电路:
实验仪器: (1)双路直流稳压电源一台。 (2)函数信号发生器一台。 (3)示波器一台。 (4)毫伏表一台。 (5)万用表一台。 (6)三极管一个。 (7)电阻各种组织若干。 (8)电解电容10uF两个,100uF一个。 (9)模拟电路试验箱一个。
实验结果: 经软件模拟与实验测试,在误差允许范围内,结果基本一致。
实验2:共射放大器的幅频相频 实验目的: 测量放大电路的频率特性。 实验原理: 放大器的实际信号是由许多频率不同的谐波组成的,只有当放大器对不同频率的放大能力相同时,放大的信号才不失真。但实际上,放大器的交流放大电路含有耦合电容、旁路电容、分布电容和晶体管极间电容等电抗原件,即使得放大倍数与信号的频率有关,此关系为频率特性。 放大器的幅频特性是指放大器的电压放大倍数与输入信号的频率之间的关系。在一端频率范围内,曲线平坦,放大倍数基本不变,叫作中频区。在中频段以外的频率放大倍数都会变化,放大倍数左右下降到0.707倍时,对应的低频和高频频率分别对应下限频率和上限频率。 通频带为: f BW=f H-f L 实验电路:
MATLAB与控制系统仿真实验书-学生
实验总要求 1、封面必须注明实验名称、实验时间和实验地点,实验人员班级、学号(全号)和姓名等。 2、内容方面:注明实验所用设备、仪器及实验步骤方法;记录清楚实验所得的原始数据和图像,并按实验要求绘制相关图表、曲线或计算相关数据;认真分析所得实验结果,得出明确实验结论。 3、图形可以打印出来并剪贴上去,文字必须用标准试验纸手写。
实验一MATLAB绘图基础 一、实验目的 了解MATLAB常用命令和常见的内建函数使用。 熟悉矩阵基本运算以及点运算。 掌握MATLAB绘图的基本操作:向量初始化、向量基本运算、绘图命令plot,plot3,mesh,surf 使用、绘制多个图形的方法。 二、实验内容 建立并执行M文件multi_plot.m,使之画出如图的曲线。
三、实验方法(参考程序) 四、实验要求 1.分析给出的MA TLAB参考程序,理解MA TLAB程序设计的思维方法及其结构。 2.添加或更改程序中的指令和参数,预想其效果并验证,并对各语句做出详细注释。对不 熟悉的指令可通过HELP查看帮助文件了解其使用方法。达到熟悉MA TLAB画图操作的目的。 3.总结MATLAB中常用指令的作用及其调用格式。 五、实验思考 1、实现同时画出多图还有其它方法,请思考怎样实现,并给出一种实现方法。 (参考程序如下)
%hold on;hold off命令
2、思考三维曲线(plot3)与曲面(mesh, surf)的用法,(1)绘制参数方程 233,)3cos(,)3sin()(t z e t t y e t t t x t t ===--的三维曲线;(2)绘制二元函数 xy y x e x x y x f z ----==22)2(),(2 ,在XOY 平面内选择一个区域(-3:0.1:3,-2:0.1:2),然后绘 制出其三维表面图形。(以下给出PLOT3和SURF 的示例)
毕业设计开题报告(虚拟实验平台设计)!
沈阳工程学院 毕业设计(论文)开题报告机械设计虚拟实验平台的开发 系部:机械工程系 专业:机械设计制造及其自动化 学生姓名:黄善兴 指导教师: 开题时间:2012 年 3 月 1 日
一、毕业设计(论文)课题的意义、国内外现状及发展趋势 1.背景分析 随着计算机多媒体技术和网络通信技术的迅速发展,信息时代的学习、生活方式都发生了重大变革。作为培养和提高学生动手实践能力、观察能力、分析问题和解决问题能力等方面有着先天优势的实验教学是高校教育改革的关键问题之一。目前,我国传统实验教学环节不足、实验资源不均衡,学生创新能力不足,虚拟实验教学环境研究与建设有利于解决当前实验教学中存在的问题。在虚拟实验平台中,学生既可以在虚拟实验台上动手操作,又可自主设计实验,有利于培养的操作能力、分析诊断能力、设计能力和创新意识。学生更易获得相关的知识,科学的指导和敏捷的反馈。虚拟实验平台是未来实验室建设的发展方向。 随着虚拟实验技术的成熟,人们开始认识到虚拟实验室在教育领域的应用价值,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点.近年来,国内的许多高校都根据自身科研和教学的需求建立了一些虚拟实验室。 2.目的及意义 由于教学资金投入有限,实验教学仪器相对落后,导致了实验教学内容陈旧,机械专业先进的实验、实训设备价格昂贵,资金投入大。目前,实验系统的构建模式不善,实验项目的开发受到影响,实验课仍停留在学生根据老师的讲解进行简单模仿的层面上,学生动手和创新思维能力没有得到有效的训练和培养。另外实验对于时间和空的限制和要求,实验教学模式比较单一和固定,这些都是高校实验教学中普在的问题。 依据学院“依托行业,面向市场,工程教育,职业取向,打造品牌,人民满意”的办学理念;适应我院“十二五规划” 提出的要充分、有效利用现代信息技术,提高人才培养质量与效益的要求;提出机械工程虚拟实验室建设,为教学科研服务,分期陆续建设和完善实验室内容,最终实现完整的教学实训网络平台。 虚拟实验环境的研究与实现,极大地降低了实验室建设成本,缓解了由于财政压力给实验实训教学环节带来的不利影响,有利于学生实践操作能力的培养,因此,虚拟实验教学环境的研究也就具有了极大的经济效益和社会效益,从而引起了更多学者、专家的关注。 3.应用前景分析 基于网络的虚拟实验室是对传统实验教学模式的革新,由于其显明的技术特点,十分适合新世纪人才培养模式,在高校实验教学中具有广阔的应用前景。 ( 1 )计算机网络的迅速普及为虚拟实验室的应用提供了有利的条件目前国内高校互联网技术的应用十分普遍,网络已经遍及到校园的每一个角落。学生既可以通过学校的公用计算机也可以用自己的计算机在宿舍里很方便登陆互联网。便利的上网条件无疑
虚拟仿真实验平台在土木工程的应用
虚拟仿真实验平台在土木工程的应用 摘要:开展虚拟仿真教学是国家教育信息化的具体体现,是未来高校实践教学发展的必由之路。首先,本文总结土木工程专业课程相关教学实验的特点,阐述进行虚拟仿真实验平台建设的必要性。其次,分析虚拟仿真实验平台在土木工程教学中的优势及作用,并提出虚拟仿真实验平台用于土木专业教学的具体举措。最后,阐述虚拟仿真教学存在的共性问题及解决策略,为今后高校土工工程专业课程开展虚拟仿真实验平台建设提供参考。 关键词:虚拟仿真;教育信息化;土木工程;实践教学 土木工程具有十分鲜明的行业背景和特点,随着社会的发展和技术进步,工程结构越来越大型化、复杂化,超高层建筑、特大型桥梁、巨型大坝、复杂的地铁系统不断涌现,满足了人们的生活需求,同时也演变为社会实力的象征。在土木工程专业的人才培养中,实验教学对学生实践能力、工程素质和创新精神的培养占有非常重要地位,由于开展实习、实践、实验等教学活动所需场地、时间和经费等诸多因素的制约,传统的实验形式单一、内容较少、知识分散,不能很好地适应工程建设快速发展对人才培养提出的新要求,迫切需要开展虚拟仿真实验,以弥补实体实验教学的不足。同时,《国家中长期教育改革和发展规划纲要(2010-2020年)》指出,"信息技术对教育发展具有革命性影响,必须予以髙度重视";。为此教育部加强了对实验教学信息化工作的宏观指导,先后出台《教育信息化十年发展规划(2011-2020年)》《2017年教育信息化工作要点》《关于2017-2020年开展示范性虚拟仿真实验教学项目建设的通知》和《教育部关于开展国家虚拟仿真实验教学项目建设工作的通知》等相关文件,旨在深入推进信息技术与高等教育实验教学的深度融合,拓展实验教学内容广度和深度,延伸实验教学时间和空间,提升实验教学质量和水平,其迫切性和重要性毋庸置疑。 一、土木工程专业实验的特点 土木工程是基于实践经验发展而来的学科,其核心课程如《混凝土结构设计原理》《桥梁工程》《钢结构设计基本原理》《隧道工程》《基础工程》《工程结构抗震》等,所涉及的教学实验普遍存在以下特点。 1.实验构件体量大、周期长 实体的房屋建筑、桥梁、隧道等工程,一般体量都很大,如高层结构中的剪力墙、大跨度桥梁的墩柱等,对这些大体量的结构或构件,在实验室完成其实体实验几乎是不可能的,同时,土木工程专业实验还存在成本髙、实验周期长等特点,如钢筋混凝土梁、柱构件实体实验模型,从试件设计,钢筋下料、模板制作、混凝土浇筑、养护直至加载试验不仅耗费大量资源,实验周期也很长,制约了学生的全程直接参与。
模电PSPICE仿真实验报告
实验一晶体三极管共射放大电路 实验目的 1、 学习共射放大电路的参数选取方法。 2、 学习放大电路静态工作点的测量与调整,了解静态工作点对放大电路性能的影响。 3、 学习放大电路的电压放大倍数和最大不失真输出电压的分析方法 4、 学习放大电路数输入、输出电阻的测试方法以及频率特性的分析方法。 、实验内容 确定并调整放大电路的静态工作点。 为了稳定静态工作点,必须满足的两个条件 条件一: 条件二: I 1>>I BQ V>>V BE I I =(5~10)I B V B =3~5V R E 由 V B V BE V B 再选定 I EQ I CQ 计算出Re R b2 I I ,由 V B V B I I (5~10)I B Q 计算出 m - Vcc V B R b1 再由 V CC V B (5~10)I BQ 计算出 Ri
Time 从输出波形可以看出没有出现失真,故静态工作点设置的合适。 改变电路参数: V1 12Vdc Rc 此时得到波形为: 400mV 200mV 0V -200mV 450us 500us 75k 3k 4.372V R2 50k Q1 Q2N2222 Re 2.2k C2 T 一 6.984V 10uF 彳Ce 100uF
2.0 V -4.0V 0s 50us 100us 口V(C2:2) V(C1:1) 150us 200us 250us 300us 350us 400us 450us 500us Time 此时出现饱和失真。 当RL开路时(设RL=1MEG Q)时: V1 输出波形为:
4.0V -4.0V 出现饱和失真 二、实验心得 这个实验我做了很长时间,主要是耗在静态工作点的调试上面。按照估计算出的Rb1、Rb2、Re的值带入电路进行分析时,电路出现失真,根据其失真的情况需要不停的调 节Rb1、Rb2和Re的值是电路输出不失真。 实验二差分放大电路 -、实验目的 1、学习差分放大电路的设计方法 2、学习差分放大电路静态工作的测试和调整方法 3、学习差分放大电路差模和共模性能指标的测试方法 二、实验内容 1. 测量差分放大电路的静态工作点,并调整到合适的数值。
虚拟仿真实验技术材料文件
虚拟仿真实验解决方案 上海华一风景观艺术工程有限公司 2017年8月
目录 第一章需求分析 (2) 一、项目背景 (2) 二、实验教学现状 (3) 三、用户需求 (3) 第二章建设原则 (5) 一、建设目标 (5) 二、建设原则 (6) 第三章系统总体解决方案 (7) 一、总体架构 (7) 二、学科简介 (8) 第四章产品优势 (14) 第五章产品服务 (16) 一、服务方式 (16) 二、服务内容 (16) 三、故障响应服务流程 (17) 四、故障定义 (18) 五、故障响应时间 (18) 六、故障处理流程 (19) 七、应急预案 (19)
第一章需求分析 一、项目背景 《国家中长期教育改革和发展规划纲要(2010-2020年)》明确指出:把教育信息化纳入国家信息化发展整体战略,超前部署教育信息网络。到2020年,基本建成覆盖城乡各级各类学校的教育信息化体系,促进教育内容、教学手段和方法现代化。加强优质教育资源开发与应用,建立数字图书馆和虚拟实验室。鼓励企业和社会机构根据教育教学改革方向和师生教学需求,开发一批专业化教学应用工具软件,并通过教育资源平台提供资源服务,推广普及应用。 在“十三五规划”方针政策指引下,各地陆续出台政策,强调数理化实验教学的重要性。 2016年,北京公布了中高考的新方案,强调义务教育阶段所有科目都设为100分,表示它们在义务教育与学生成长中同等重要,不再人为去区分主次,使学校、老师、家长、社会对每一门学科都很重重视,其中物生化实验部分占分比例为30%,高考不再文理分科。 继北京重磅发布此消息后,河南教育厅发布《关于2016年普通高中招生工作的意见》,其中明确要求理化生实验操作考试满分为30分;安徽省初中毕业升学理化实验操作考试分数为15分,考试成绩计入考生中考录取总分;山西省理化实验操作10分。
模电仿真实验报告。
模电仿真实验报告。
————————————————————————————————作者:————————————————————————————————日期:
模拟电路仿真实验报告 张斌杰生物医学工程141班学号6103414032 Multisim软件使用 一、实验目的 1、掌握Multisim软件的基本操作和分析方法。 二、实验内容 1、场效应管放大电路设计与仿真 2、仪器放大器设计与仿真 3、逻辑电平信号检测电路设计与仿真 4、三极管Beta值分选电路设计与仿真 5、宽带放大电路设计与仿真 三、Multisim软件介绍 Multisim是美国国家仪器(NI)有限公司推出的以Windows为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。工程师们可以使用Multisim交互式地搭建电路原理图,并对电路进行仿真。Multisim提炼了SPICE仿真的复杂内容,这样工程师无需懂得深入的SPICE技术就可以很快地进行捕获、仿真和分析新的设计,这也使其更适合电子学教育。通过Multisim和虚拟仪器技术,PCB设计工程师和电子学教育工作者可以完成从理论到原理图捕获与仿真再到原型设计和测试这样一个完整的综合设计流程。 一、实验名称: 仪器放大器设计与仿真 二、实验目的 1、掌握仪器放大器的设计方法 2、理解仪器放大器对共模信号的抑制能力 3、熟悉仪器放大器的调试功能 4、掌握虚拟仪器库中关于测试模拟电路仪器的使用方法,如示波器,毫伏表信 号发生器等虚拟仪器的使用 三、设计实验电路图:
虚拟仿真虚拟现实实验室解决方案
数虎图像提供虚拟仿真实验室硬件设备搭建和内容制作整体解决方案 虚拟现实实验室是虚拟现实技术应用研究就的重要载体。 随着虚拟实验技术的成熟,人们开始认识到虚拟实验室在教育领域的应用价值,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点.近年来,国内的许多高校都根据自身科研和教学的需求建立了一些虚拟实验室。数虎图像拥有多名虚拟现实软硬件工程师,在虚拟现实实验室建设方面有着无与伦比的优越性! 下面请跟随数虎图像一起,让我们从头开始认识虚拟现实实验室。 【虚拟现实实验室系统组成】: 建立一个完整的虚拟现实系统是成功进行虚拟现实应用的关键,而要建立一个完整的虚拟现实系统,首先要做的工作是选择确实可行的虚拟现实系统解决方案。 数虎图像根据虚拟现实技术的内在含义和技术特征,并结合多年的虚拟现实实验室建设经验,最新推出的虚拟现实实验室系统提供以下组成: 虚拟现实开发平台: 一个完整的虚拟现实系统都需要有一套功能完备的虚拟现实应用开发平台,一般包括两个部分,一是硬件开发平台,即高性能图像生成及处理系统,通常为高性能的图形计算机或虚拟现实工作站;另一部分为软件开发平台,即面向应用对象的虚拟现实应用软件开发平台。开发平台部分是整个虚拟现实系统的核心部分,负责整个VR场景的开发、运算、生成,是整个虚拟现实系
统最基本的物理平台,同时连接和协调整个系统的其它各个子系统的工作和运转,与他们共同组成一个完整的虚拟现实系统。因此,虚拟现实系统开发平台部分在任何一个虚拟现实系统中都不可缺少,而且至关重要。 虚拟现实显示系统: ·高性能图像生成及处理系统 ·具有沉浸感的虚拟三维显示系统 在虚拟现实应用系统中,通常有多种显示系统或设备,比如:大屏幕监视器、头盔显示器、立体显示器和虚拟三维投影显示系统,而虚拟三维投影显示系统则是目前应用最为广泛的系统,因为虚拟现实技术要求应用系统具备沉浸性,而在这些所有的显示系统或设备中,虚拟三维投影显示系统是最能满足这项功能要求的系统,因此,该种系统也最受广大专业仿真用户的欢迎。虚拟三维投影显示系统是目前国际上普遍采用的虚拟现实和视景仿真实现手段和方式,也是一种最典型、最实用、最高级别的投入型虚拟现实显示系统。这些高度逼真三维显示系统的高度临场感和高度参与性最终使参与者真正实现与虚拟空间的信息交流与现实构想。 虚拟现实交互系统 多自由度实时交互是虚拟现实技术最本质的特征和要求之一,也是虚拟现实技术的精髓,离开实时交互,虚拟现实应用将失去其存在的价值和意义,这也是虚拟现实技术与三维动画和多媒体应用的最根本的区别。在虚拟现实交互应用中通常会借助于一些面向特定应用的特殊虚拟外设,它们主要是6自