模糊PID控制器设计
第3章模糊PID智能控制算法设计
PID控制是工业过程中应用最广泛的、常规控制中最基本的控制方法,具有结构简单、易于实现、不依赖于系统精确的模型的优点。但是当其用到复杂控制系统时,难以取得理想的控制效果,甚至会导致系统不稳定。智能控制具有学习能力、对变化环境的适应能力以及自组织协调能力,能够应用到复杂系统的控制中。因此,将智能控制方法和常规PID控制方法结合起来,可以充分发挥两种方法的优点,提高控制系统的整体性能。
常规PID控制的参数是固定的,在广义被控对象发生变化时,其自身参数不能根据变化做出相应的调整。针对这一问题,已有研究者提出能自校正的PID 控制方法。但是在系统非线性的情况下,实现自校正相当困难。因而需要设计一种PID参数自适应的控制方法,在对象发生变化时,其参数能进行动态调整。采用智能控制方法对自适应PID的参数进行优化,将优化的参数送到控制器,将可以很好的弥补传统PID的缺陷,达到良好的控制效果,智能自适应PID控制应运而生[1]。
PID控制系统的参数分为比例、积分、微分系数和PID控制器的参考值两个方面,因此改变PID参数也有改变比例、积分、微分系数和改变PID回路的参考值两种方法。通常的自适应PID控制是采用前一种方法,对于被控对象的模型的改变,通过调整比例、积分、微分系数来调整三种作用的强弱,从而来适应变化。这类控制方法中最具代表性的是模糊自适应PID控制方法。
模糊自适应PID控制是用模糊控制来适时调整PID参数的方法,其主要思想是结和工程设计人员的技术知识和实际操作经验,建立合适的模糊规则,通过推理得到比例、积分、微分三个整定参数。由于一维模糊控制精度不够,而三维模糊控制计算过于麻烦,通常情况下采用二维模糊控制方法实现参数整定。具体的方法是通过计算当前系统误差及误差变化率得到模糊控制的输入,利用模糊规则进行模糊推理,查询模糊规则表进行参数调整。参数的调整包括极性和大小两个方面。同时,系统要求辨识机构能够提供足够的系统信息,且保证模糊自整定PID有较为广泛的控制空间。模糊规则的设计要保证系统满足快速响应、无静差的要求
3.1 PID 控制基本原理
比例积分微分(proportional integral derivative, PID )控制是到现在为止最通用、最基本的控制方法。目前大多数的反馈回路用该办法或者较小的变形来控制。PID 及其改进型是工业控制中最常见的控制器。虽然自20世纪初PID 控制诞生以来,控制理论与控制技术取得了令人瞩目的成就,先进控制策略不断更新,但该控制器因结构简单、对模型误差有鲁棒性和易于操作实现在大多数过程控制中取得令人满意的控制性能,现仍然被广泛用于冶金、电力、化工、机械和轻工等工业控制中。
3.1.1 PID 控制器原理
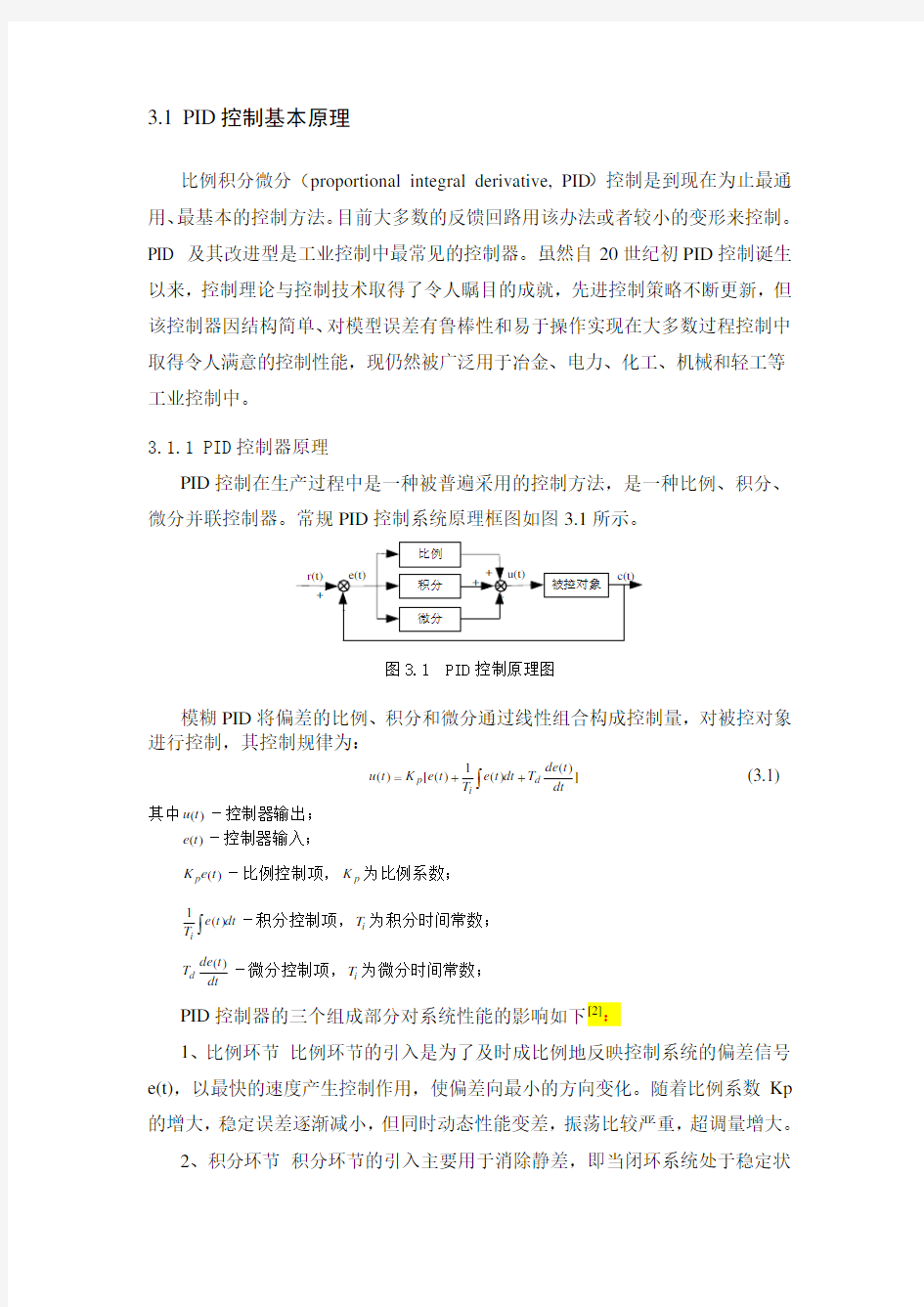
PID 控制在生产过程中是一种被普遍采用的控制方法,是一种比例、积分、微分并联控制器。常规PID 控制系统原理框图如图3.1所示。
图3.1 PID 控制原理图
模糊PID 将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制,其控制规律为:
1()()[()()]p d i de t u t K e t e t dt T T dt
=+
+? (3.1)
其中()u t -控制器输出;
()e t -控制器输入;
()p K e t -比例控制项,p K 为比例系数;
1
()i e t dt T ?-积分控制项,i T 为积分时间常数; ()
d
de t T dt
-微分控制项,i T 为微分时间常数; PID 控制器的三个组成部分对系统性能的影响如下[2]:
1、比例环节 比例环节的引入是为了及时成比例地反映控制系统的偏差信号 e(t),以最快的速度产生控制作用,使偏差向最小的方向变化。随着比例系数Kp 的增大,稳定误差逐渐减小,但同时动态性能变差,振荡比较严重,超调量增大。
2、积分环节 积分环节的引入主要用于消除静差,即当闭环系统处于稳定状
态时,则此时控制输出量和控制偏差量都将保持在某一个常值上。积分作用的强弱取决于积分时间常数T i ,时间常数越大积分作用越弱,反之越强。随着积分时间常数T i 的减小,静差在减小;但过小的积分常数会加剧系统振荡,甚至使系统失去稳定。
3、微分环节 微分环节的引入是为了改善系统的稳定性和动态响应速度,它可以预测将来,能反映偏差信号的变化趋势,并能在偏差信号值变的过大之前,在系统引入一个有效的早期修正信号,从而加速系统的动态速度,减小调节时间。 3.1.2 数字PID 控制器
计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。因此,连续PID 控制算法不能直接使用,需要采用离散化方法。在计算机PID 控制中,使用的是数字PID 控制器。按模拟PID 控制算法,以一系列的采样时刻点T(k)代表连续时间t ,以矩形法数值积分近似代替积分,以一阶后向差分近似代替微分,即
000 (0,1,2)()()()()()[(1)]()(1)k k t
j j t kt k e t dt T e jT T e j de t e kT e k T e t e k dt
T T ==?
?≈=?
??≈=???
----?≈=??∑∑? (3.2)
将描述连续PID 算法的微分方程,变为描述离散时间PID 算法的差分方程,
为书写方便,将e(kT)简化表示成e(k),即为数字PID 位置型控制算法,如式(3.3)、所示。
0()()()[()(1)]k
D p i j T T u k K e t e j e k e k T T =???
?=+
+--?????
?
∑
(3.3)
或
()()()[()(1)]k
p i D j u k K e t K e j K e k e k ==++--∑
(3.4)
[][]
()()(1)
()(1)()[()2(1)(2)]()()()(1)p i d p i d u k u k u k K e k e k K e k K e k e k e k K e k K e k K e k e k ?=--=--+---+-=?+?+-- (3.5)
式(3.5)中[]()()(1)e k e k e k ?=--,()u k ?即为增量式PID 控制量,由第k 次采样计算得到的控制量输出增量。可以看出,由于一般计算机控制系统采用恒定的采样周期T ,一旦确定了K p 、K i 和K d ,只要使用前3次的测量值偏差,即可求出控制量的增量。
PID控制用途广泛、使用灵活,已有很多成功的实例。在生产实践当中很多情况下,并不一定需要全部设定三个比例、微分和积分控制,可以根据实际情况,因地制宜取其中的一个或两个控制即可。但是需说明的是:在设计PID控制器中,比例控制是必不可少的。
3.1.3 PID控制器的参数整定
PID控制器参数的调整方法有好多种,目前采用的方法主要有临界比例系数法、响应曲线法、Ziegler-Nichols参数设定方法、改进的Ziegler-Nichols参数设定方法、扩充临界比例系数法、扩充响应曲线法、基于交义两点法的PID整定规则和基于增益优化的整定方法等等[3]。
(1)扩充临界比例系数法
模拟控制在进行参数调整时经常使用的一种方法是临界比例系数法,而扩充临界比例系数法就是在此方法的基础上进行扩展得到的。此方法利用采样周期周期最小的一个值调节P值,在通过查表法算出其他的参数。
(2)扩充响应曲线法
扩充响应曲线法是在对模拟控制器参数调整时所使用的曲线法的基础上进行扩展得到的。方法为先根据动态相应曲线求出等效时间常数T k.和等效纯滞后时间τ,然后再求出T k/τ的值,再根据表格求出T0、K p、K i和K d的值。
(3)Ziegler-Nichols(ZN) 参数设定方法
在实际的应用中,为了使PID控制器调节简单、节省时间,应尽量少使用或不使用复杂的数学公式进行计算,尽可能多的利用以往的操作经验进行参数的整定。
3.1.4 PID控制器的改进
1、积分饱和现象及其抑制采用标准PID 位置式算法,在实现控制的过程中,只要系统的偏差没有消除,积分作用就会继续增加或减小,最后使控制量达到上限或者下限,系统进入饱和范围。而对时间常数较大的被控对象,在阶跃响应作用下,偏差通常不会在几个采样周期内消除掉,积分项的作用就可能使输出值超过正常范围,造成较大的超调。为了克服这种现象,可以采用过限消弱积分法和积分分离法。
过限消弱积分法就是在控制变量进入饱和区后,程序只执行削弱积分项的运
算,而停止增大积分项的运算。
积分分离法的基本思想是:当误差大于某个规定的门限值时,删去积分作用,从而使积分项不至于过大,只有当误差较小时,才引入积分作用,以消除稳态误差。
2、干扰的抑制数字PID控制器的输入量是系统的给定值r 系统实际输出的偏差值e。在进入正常调节过程后,由于e值不大,此时相对而言,干扰对控制器的影响也就很大。为了消除干扰的影响,除了在硬件采取相应的措施以外,在控制算法上也要采取一定的措施。
对于作用时间较短的快速变化的干扰,如A/D转换偶然出错,可以用连续多次采样并求平均值的方法予以滤除。在PID 控制算法中,差分项对数据误差和干扰特别敏感。因此一旦出现干扰,由它算出的结果可能出现很大的非希望值。此时可以使用四点中心差分法等方法对差分项进行改进,以提高系统抗干扰能力[4]。
3.2 模糊控制基本理论
国内外研究学者们对模糊现象的认识由来已久,20世纪20年代开始,对模糊问题就有学者一直在进行研究。1965年数学家Zadeh发表了论文Fuzzy Sets,在该论文中Zadeh首次提出了度量事物模糊程度的概念:隶属函数,由此产生了模糊集合理论。这一理论的产生突破了迪笛卡尔在19世纪末创建的经典集合论,开创了模糊逻辑和模糊数学的新篇章[5]。
3.2.1 模糊控制的基本思想
模糊控制是将以模糊集合理论、模糊语言以及模糊逻辑推理为基础的理论,同传统的控制理论相结合,来模拟人的思维方式,对难以建立精确数学模型的被控对象进行控制的一种方法。模糊控制的基本思想就是用计算机来模拟人对系统的控制,将人的控制思想,也就是把专家的知识和操作者的经验进行总结,并将这些经验表达成模糊控制规则,然后将这些控制规则转化成计算机可以执行的算法,进而完成对被控对象的控制[6]。
3.2.2 模糊控制系统工作原理
模糊控制无需预先知道被控对象的精确数学模型,以人的经验总结出来的条件语句表示的控制规则,采用模糊控制却能对工业生产过程的大规模系统控制取得令人满意的控制效果。其主要反映在对对象复杂的、机理不明的控制系统,它模仿和升华了人的控制经验与策略,实现了智能化的控制。
(1)模糊控制系统组成
一个模糊控制系统必须包含一些必要的部件,模糊控制的系统框图如图 3.2所示,其中矩形框内为模糊控制器部分,模糊控制器是模糊控制系统的核心部分,是模糊控制系统区别于其它控制系统的标志,模糊控制器中存放的是由模糊控制规则推导出来的模糊控制算法,一般由微机编程或者硬件来实现,模糊控制器不依赖于被控对象的精确数学模型,被控对象不同,以及对系统的静态和动态性能要求不同,模糊控制器的控制规则也不尽相同。
图3.2 模糊控制系统框图
(2) 模糊控制器工作原理
模糊控制无需预先知道被控对象的精确数学模型,以人的经验总结出来的条件语句表示的控制规则,采用模糊控制却能对工业生产过程的大规模系统控制取得令人满意的控制效果。其主要反映在对对象复杂的、机理不明的控制系统,它模仿和升华了人的控制经验与策略,实现了智能化的控制[7]。
模糊控制器的结构框图如图3.3所示。模糊控制器的输入是系统给定值和当前值的误差e和误差变化量ec,模糊控制器的输出为控制量u。模糊控制器主要由输入量的模糊化处理、模糊控制规则、模糊推理和去模糊化四部分组成。
模糊逻辑系统的工作机理:首先通过模糊化模块将输入的精确量进行模糊化处理,转换成给定论域上的模糊集合;然后激活规则库中对应的模糊规则,并且选用适当的模糊推理方法,根据已知的模糊事实获得推理结果,最后将该模糊结
果去模糊化处理,得到最终的精确输出量。
ec 模
糊
化
处
模糊
控制
规则
去
模
糊
化
模
糊
推
理
e
u
图3.3 模糊控制器结构框图
(3) 模糊控制器的实现步骤
模糊控制器的实现步骤主要有以下几步[2]:
第一步、计算系统设定值和当前值的误差e和误差变化量ec。
第二步、输入量的模糊化处理。即将精确值e和ec模糊化成模糊语言变量,把语言变量值化为适当论域的模糊子集(如“大”、“中”、“小”等)。
第三步、模糊控制规则。模糊控制规则是模糊控制器的核心,是反映专家知识和经验的控制策略。
第四步、模糊推理,即模糊决策。就是将模糊化后的语言变量和模糊控制规则,根据推理合成规则,推出得到模糊控制量的过程。
第五步、去模糊化。因为模糊推理的结果是一个模糊量,必须将模糊控制量转化为精确量,这一过程成为去模糊化,也可以称为解模糊。
3.3 聚氨酯胶生产线模糊PID智能控制器设计
聚氨酯胶的RIM过程中,反应物料在模具中发生反应,产生分子链的增长和链的相互联结、缠结。当固化完成时,形成闭合的聚合网络。因此,反应物料的固化过程是人们所关心的,它由反应动力学和热力学决定,同时也受物理条件的影响,如模具的尺寸和温度、反应物料的温度等。通过控制反应的化学和物理条件,交联度可以变化,使得最终聚氨酯胶具有可满足不同需要的性质。固化反应对环境温度的变化十分敏感,小幅度的环境温度变化会引起涂料固化反应的明显加快或减缓。另外,固化温度对聚氨酯胶的微观结构、相转变温度及热性能等特性也影响较大,因此,实现精确的温度控制是聚氨酯胶生产过程的关键。为了进一步提高聚氨酯胶生产线模具温度的控制精度,闭环控制器采用了Fuzzy-PI
控制器。通常的二维Fuzzy控制器具有良好的动态性能、鲁棒性强、对参数变化及外界干扰具有良好的适应能力等优点,但存在着稳态误差无法消除的缺点,且在工作点附近容易产生极限振荡。由线性控制理论可知,积分控制的作用能消除稳态误差,但动态响应慢。因此将PI控制策略引入Fuzzy控制器,构成Fuzzy-PI 复合控制方式,通过模糊控制器实现对PID控制器参数的在线调整,实现高精度温度控制。将所设计控制器应用到聚氨酯胶的RIM过程中。很好的解决了聚氨酯胶反应釜中温度的升温、恒温、降温控制问题。
参数自整定的模糊PID控制器控制结构如图3.4所示。其原理为:根据现场的不同情况,利用模糊控制器在线调整PID控制中的参数K p、K i和K d,以达到在线智能自整定的作用。PID控制的关键是确定PID参数,该方法是用模糊控制来确定PID参数的,也就是根据系统偏差e和偏差变化率ec,用模糊控制规则在线对PID参数进行修改。其实现思想是先找出PID各个参数与偏差e和偏差变化率ec之间的模糊关系,在运行中通过不断检测e和ec,再根据模糊控制原理来对各个参数进行在线修改,以满足在不同e和ec时对控制参数的不同要求,使控制对象具有良好的动、静态性能,且计算量小,易于计算机实现[4]。
图3.4 参数自整定模糊PID控制结构图
模糊PID控制器设计主要分为以下步骤[8,9]:
1. 确定模糊控制器的结构;
2. 选择模糊规则;
3. 模糊推理和模糊判决,得到模糊控制查询表;
4. 根据实验结果,分析模糊PID 的控制性能,再对量化因子和比例因子进行调整以达到理想的控制效果。
3.3.1 模糊控制器的结构选择
模糊控制器的结构选择,就是确定模糊控制器的输入输出变量。理论上讲,模糊控制器维数越高,控制越精密。但是,维数越高,模糊控制规则变得过于复杂,控制算法的实现相当困难。由于系统受控对象温度具有非线性与时滞性,为了得到良好的控制性能,不仅要观测系统的温度偏差e,同时应该观测其偏差变化ec的趋势,因此,系统采用的是二维模糊控制器,输入变量取为温度偏差e 和偏差变化ec,输出变量为PID参数的修正量K p、K i和K d,这样就构成了一个双输入三输出的模糊控制器,如图3.5所示,同时可得模糊控制器在Matlab环境下的系统参数。
图3.5 模糊控制器结构图
3.3.2 模糊控制器的设计
模糊控制器是基于模糊规则设计的,模糊规则是由若干语言变量构成的模糊条件语句,它需要设计者根据模糊控制器的结构,从大量的观察和实验数据中提取。其选择过程可简单分成三个部分,即选择适当的模糊语言变量,确定各语言变量的隶属度函数,最后建立模糊控制规则[10]。
(1)模糊语言变量的确定
当选择的模糊词集较多时,则输入和输出变量的控制规则就变的比较简单,不过此时就需要更多的响应规则。当选择的词集较少时,变量的性能不能完全体现,这就不能发挥模糊控制器的作用。
根据系统的实际需要,将温度误差e、误差变化率ec和控制输出量K p、K i 和K d采用七个词集来描述,即模糊子集为e、ec、K p、K i和K d={PB,PM,PS,Z,NS,NM,NB},各子集中的元素依次代表代表正大,正中,正小,零,负小,负中,负大。表3.1给出了各个变量的基本论域、模糊论域和量化因子。
表3.1 语言变量参量表
(2)语言变量隶属度函数的确定
在选择模糊控制器的隶属度函数时,要根据误差的大小来合理分配。比如在误差较大的范围内,择较为粗犷的模糊集合。反之,在小误差范围内,采用相对比较灵敏的模糊集合。通过合理的模糊隶属函数的选择,能对被控对象的控制效果满足发酵过程温度控制的要求。本文中对NB和PB采用正太行分布的隶属度函数,PM,PS,Z,NS,NM均采用三角形的分布函数。各变量的隶属度函数如图3.6~3.11所示。
图3.6 输入变量e的隶属度函数
图3.7 输入变量ec的隶属度函数
图3.8输出变量K p的隶属度函数
图3.10 输出变量K d的隶属度函数
(3)模糊控制规则的建立
模糊控制规则的选择是设计模糊控制器的核心。它实质上是将操作人员的控制经验加以总结得出一条条模糊条件语句的集合。根据控制系统中对过渡过程要求和专家经验,对参数和的自整定要求如下[2]:
从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑,K p、K i 和K d作用如下:
1.比例系数K p的作用是成比例的反映控制系统的偏差信号,偏差一旦产生,控制器立即产生作用以减小偏差。
2.积分作用系数K i的作用是用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数T,T越大,积分作用越弱,反之积分作用就越强。
3.微分作用系数K d的作用是反映偏差信号的变化趋势即变化速率,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统
的动作速度,减少调节时间。
针对不同时刻的的e和ec以及PID参数的整定规则对K p、K i和K d进行以下设定:
1.当e较大,为了能快速的对偏差就行修正,此时应选取较大的K p,同时选择较小的K i、K d避免系统出现较大的超调量;
2.当e和ec中等大小时,应取较小的K p以避免出现较大的超调,同时,因为K d的取值会对系统的控制效果影响较大,应取小一些,将K i定位于一个较宜的位置即可;
3.当e较小时,为使系统具有较好的稳定性能,K p和K i均应取大些,同时为避免系统在设定值时出现震荡,并考虑系统抗干扰的性能,当ec较大时,K d 可取小些;ec较小时,K d可取得较大些,通常K d为中等大小。
由以上PID参数整定规则和专家知识经验,得到针对本文所研究的聚氨酯胶胶生产线温度智能PID控制系统中K p、K i和K d三个参数分别整定的模糊控制规则表,如表3.2、3.3和3.4所示。
表3.3 K的控制规则调整表
表3.3 K
的控制规则调整表
(4)模糊推理和模糊判决
模糊算法的推理与确定是控制器设计的核心部分。本文中,通过模糊控制规则对PID 控制器的参数进行在线调整,其关键在于找出误差e 和误差改变量ec 与PID 控制器参数之间的模糊关系。具体操作是,在系统运行时不断的检测误差e 和误差改变量ec 的值,根据模糊控制原理以及e 、ec 和K p 、K i 和K d 之间的模糊关系,对K p 、K i 和K d 进行在线修正,使其能够针对不同的运行工况进行相应的调整,最终获得良好的控制性能。
根据表3.2、3.3和3.4整理出的49条模糊控制规则对K p 、K i 和K d 三个参数进行自校正校正,获得的模糊控制规则如图3.11所示。
图3.11 系统模糊控制规则
根据输入变量(模糊量)和模糊控制规则,按模糊推理规则计算输出量,即根据模糊控制规则进行模糊推理,然后查询模糊控制可以计算出在不同的偏差和偏差变化时,PID 参数的调整量的输出值,但该值还是模糊量,不能直接用于修正PID 参数,还需乘以比例因子。这样,就得到了PID 参数的整定算式。
'
0'
0'
0p p p i i i d
d d K K K K K K K K K ?=+??=+??=+?? (3.6)
式中K p0、K i0和K d0分别是K p 、K i 和K d 的初始值,可由凑试法得到。K p 、K i 和K d 是模糊控制器的输出,即PID 参数的校正量。将式(3.6)带入式(3.4)就得到数字PID 位置型参数,经PID 控制算法,即可得出控制输出量,经D/A 转换后控制粗精回路的切换,从而实现温控箱温度控制。 3.3.3 聚氨酯胶生产线温度模糊PID 控制系统仿真
采用模糊PID 参数自整定温控箱温度控制系统进行Matlab 仿真,仿真模型图如图3.12所示。
图3.12 模糊PID 控制系统仿真模型
其中,PID -Function 和S-Function 分别为模糊PID 控制器和被控对象的M 文件,为了在Simulnik 模型或M 文件中应用这个调节器,必须以矩阵的形式把它保存到工作空间,选择“Save to workspace ”项保存。
Matlab 仿真实验中,选取江苏波士粘合剂有限公司聚氨酯胶生产线物料反应罐为被控对象,对其进行温度控制,其传递函数为:
()2706525110s e G s s
-=+
(3.7)
设给定设为50℃,仿真结果如图3.13和3.14所示。
图3.13 模糊PID控制仿真结果
图3.14 传统PID控制仿真结果
由图3.13可知,当采用模糊控制器控制聚氨酯胶生产线温度控制系统时,其调节时间tss不大于2.8×104秒,超调量不大于3%,稳态误差ess近似为零。该算法增强了系统的稳定性,且计算量小,设计简单,易于实现,具有良好的控制效果。根据系统误差和误差变化率在线修正PID控制器参数,可实现对系统实时有效的控制,具有一定的智能性,能很好的解决系统中存在的非线性、时滞等
问题。
3.4 Fuzzy control++生成自适应模糊PID控制块程序
Fuzzy control++是西门子工业自动化与驱动集团开发出的一款模糊控制软件,该软件可以将常规的模糊计算机算法转化成西门子的300或者400CPU都可以识别和应用的功能块程序,这样就可以使得模糊算法程序与过程控制程序一并在中央控制器中运行。从而可以实现完全意义上的模糊控制与传统过程控制之间的无缝连接。Fuzzy control++主要有SIMATICS7功能块,而SIMATIC WinCC 分为两种运行模块的S7-4K、S7-20K、WinCC、CFC-4K、CFC-20K等五种应用目标的系统。结合该项目的实际要求,我们选择采用PCS7平台的CFC_4K目标系统。该目标系统目前支持最大包含8个模糊输入量,4个模糊输出量,100条推理规则,其典型的执行时间最快可以达到大约4ms。
其大概的过程是在Fuzzy control++中建立合成中温的模糊控制工程,编辑和设置输入量和输出量,同时定义其模糊化的方法,建立模糊规则库进行推理,其解模糊的过程用重心法完成,最后产生相应的Fuzzy control++模糊模型数据与相应的模糊程序。上述过程结束后,我们在将下载模糊数据块到PCS7过程系统中。下载模型数据之前,根据实际项目选择正确的通讯方式下载即可。
此CFC只给出了模糊自适应PID主回路的程序,串级副回路的程序未给出,当主回路偏差E>0.5时,选择模糊自适应控制;当主回路偏差E<=0.5时,主回路选择常规PID控制。其中FUZZY--FB为模糊控制功能块,PID_SCX为PID控制功能块。当使用串级控制时,主控制器的调节变量LMN与副控制器的输入SPEXT相连。注意如果采用级联,则必须将主控制器设为跟踪模式。具体如图3.15所示。
图3.15 合成中温自适应模糊控制CFC程序(主回路部分)
[1] 方鹏.基于模糊PID算法的中央空调温度控制系统设计.合肥工业大学,2009.3.
[2] 路桂明.基于模糊PID控制的电锅炉温度控制系统的研究.哈尔滨理工大学,2012.
[3] 安重仰.基于ARM的温度智能控制研究.河北工业大学,2011.
[4] 杨帆.具有PID自整定功能的温度控制器研究与实现. 大连理工大学,2006.
[5] 李智.井式电阻炉温度模糊PID控制算法研究与温度控制系统设计.辽宁科技大学,2011.10
[6] Biglarbegian M, Melek. W.W, Mendel J.M. On the Stability of Interval Type-2 TSK Fuzzy
Logic Control Systems. Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, 2010,40(3):798-818.
[7] Tanaka. K., Ohtake. H., Wang H.O. A Descriptor System Approach to Fuzzy Control System
Design via Fuzzy Lyapunov Functions. Fuzzy Systems, IEEE Transactions on, 2007, 15(3): 333-341.
[8] 陈永秀.伺服转台温控箱控制系统设计与研究.哈尔滨工业大学,2008.6.
[9] 王润泽.生物发酵温度控制策略的研究,河北工业大学,2010.12
[10]王晓红.Fuzzy-PID.控制在吊运100米钢轨系统中的应用.内蒙古科技大学,2011.6.
模糊PID控制器的设计与仿真——设计步骤(修改)
模糊PID 控制器的设计与仿真 设计模糊PID 控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。 本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔK P ,ΔK D ,ΔK I ,在设计模糊PID 的过程中,需要 将这些精确量转换成为模糊论域上的模糊值。本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。 模糊PID 控制器的设计选用二维模糊控制器。以给定值的偏差e 和偏差变化ec 为输入;ΔK P ,ΔK D ,ΔK I 为输出的自适应模糊PID 控制器,见图1。 图1模糊PID 控制器 (1)模糊变量选取 输入变量E 和EC 的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。就本系统而言,设置语言变量取七个,分别为 NB ,NM ,NS ,ZO ,PS ,PM ,PB 。 (2)语言变量及隶属函数 根据控制要求,对各个输入,输出变量作如下划定: e ,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ΔK P ,ΔK D ,ΔK I 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} 应用模糊合成推理PID 参数的整定算法。第k 个采样时间的整定为 ).()(,)()(,)()(000k K K k K k K K k K k K K k K D D D I I I P P P ?+=?+=?+= 式中000,,D I P K K K 为经典PID 控制器的初始参数。
PID控制;模糊控制;模糊PID控制器
摘要 交流伺服电机现广泛应用于机械结构的驱动部件和各种数控机床。PID控制是伺服系统中使用最多的控制模式之一。尽管传统的PID控制系统构造简单、运转稳定,但交流伺服电机存在非线性的、强耦合。当参数变动或非线性因素的影响发生变化时,控制不能实时改动,不能满足系统高性能、高精度的要求。结合模糊控制和传统PID控制成一种新的控制方法--模糊PID控制是解决上述问题的一种很好的途径。模糊控制器不需要被控对象的数学模型,而是根据之前人为设定的控制要求设计用来控制的决策算法,使用此方式确定控制量。模糊控制和传统PID控制融合的结果,不单具有模糊控制的高性能,还具备传统PID控制精准度高的长处。 本文对PID控制算法的原理和模糊控制算法作了简要的描述和比较。指出模糊PID混合控制法,在误差很大时使用模糊控制,在不大时使用PID控制,在MATLAB软件中,对交流伺服系统的位置控制进行了仿真。结果表明,该控制系统仿真结果与理论上差距较小。 关键词:PID控制;模糊控制;模糊PID控制器;MATLAB 第1章绪论 1.1 研究课题的任务 本课题的任务是了解交流伺服系统,比较并结合两种控制的优点,结合成一种新的控制方式--模糊PID控制。该控制法在系统输出差距大时采用模糊控制,而在差距较小时采用PID控制。文章最后给出了模糊PID位置控制的MATLAB响应图,同时给出了常规PID控制下的效果图,并比较分析。 1.3 交流伺服系统工作原理 相对单一的系统,其一般是根据位置检测反馈组成闭环位置伺服系统。其组成框图参考图1-1内容[14]。 此类系统主要原理是对比输入的目标位置信号和位置检测设备测试的真实位置信号统计其偏差且使用功率变换器的输入端弱化误差。控制量被信号转换和功率放大驱动,驱动伺服组织,促使误差不断缩减少,一直到最佳值。 (1)位置检测装置是此类系统的关键构成方面,完整系统的动态功能是否可以满足需求,关键的是位置检测传感器的科学选择以及精度。当前普遍使用的位置传感器主要是接触式,接近式,曲轴位置,节气门位置等多种类型的传感器。 (2)在此类系统中,功率变换器是完成此类电机高性能调速的关键。此外,它应该具备较稳定的输出功率和较高的调频电压精度,而且还需要在有温差是稳定运行的能力、较强的电磁抗干扰能力、系统异常保护的功能。 (3)伺服电机是伺服系统的主要组成部分。伺服电机具有良好的低速特性是伺服电机具有高精度的关键。伺服系统的快速响应(急停,启动)也指出此类电机需要具备更小的转动惯量、较高加速转矩(过载转矩)、相对平稳性等。当前被普遍使用的主要是感应式交流异步电动机等类型。 (4)控制器其一般包含微处理芯片,比如微处理器以及数字信号处理器(DSP)等部分。 一般闭环控制系统的功能更加完善,具备方位、速度与电流反馈等功能。参考图1-2可知。 图1-2 交流伺服系统的三闭环结构 电流环和速度环全部是内环。前者的功能是: 提升内环控制主体的传递函数的精准性,促进系统的平稳运作。 避免电流环内部的干扰; 防止发生电路内电流超出额定数值的问题,保证系统的安全运行。
模糊PID控制器设计
模糊PID控制器 o引言: PID控制作为一种典型的传统反馈控制器,以其结构简单,易于实现和鲁棒性好等特点 在工业过程控制中广泛应用。但是传统PID控制器的参数需要被控对象的数学模型来进行调整,而控制过程中的滞后性、控制参数的非线性和高阶陛增加了对Kp、Ki、Kd三个参数的 调整难度。所以对确定的控制系统通过复杂的计算后,其三个参数的值在控制运行中一般是 固定的,不易进行在线的调整。而在实际的工业生产过程中,许多被控对象受到负荷变化和 干扰因素的作用,其对象参数的特征和结构易发生改变,这就需要对参数进行动态的调整。同样因为被控系统的复杂性和不确定性,其精确的数学模型难以建立,甚至无法建立模型,所以需要利用模糊控制技术等方法来解决。模糊PID无需考虑被控系统的模型,而只根据其 误差e和误差变化ec等检测数据来自适应调整Kp、Ki、Kd的值,最终使被控系统处于稳定工作态。1、传统PID控制器: PID参数模糊自整定是找出PID中3个参数与e和ec之间的模糊关系,在运行中通过 不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动稳态性能。从系统的稳定性、响应速度、超调量和稳态精度等方面来考虑Kp,Ki,Kd的作用如下: (1)比例系数Kp的作用是:加快系统的响应速度,提高系统的调节精度。Kp越大,系统的响 应速度越快,系统的调节精度越高,但易产生超调,甚至导致系统不稳定;Kp取值过小, 则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。 ⑵积分作用系数Ki的作用是:消除系统的稳态误差。Ki越大,系统的稳态误差消除越快, 但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调;若Ki 过小,将使系统稳态误差难以消除,影响系统的调节精度。 (3)微分作用系数Kd的作用是:改善系统的动态特性。其作用主要是能反应偏差信号的变化趋势,并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 2、模糊PID参数自整定控制器设计 2.1控制器结构: 2.2模糊化 由PID各个参数对系统的影响得到:
常规pid控制器与模糊控制器的比较
上机实验 已知系统的传递函数为G(S)=1/(10S+1)e-0.5s。假设系统给定为阶跃值r=30,系统的初始值r(0)=0试分别设计常规PID控制器和模糊控制器。 常规PID控制器的设计: 利用Ziegler-Nichols整定公式整定PID调节器的初始参数 由公式可得 P=18 Ti=1.65 Td=0 SIMULINK仿真图 设定仿真时间为10s 仿真结果 模糊控制器的设定 1在matlab命令窗口输入“fuzzy”确定模糊控制器结构:即根据具体的系统确定输入、输出量。选取二维控制结构,即输入为误差e和误差变化ec,输出为u如下图所示 2输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。首先我们要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,然后我们为模糊语言变量选取相应的隶属度函数。如下图所示 3模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。首先要确定模糊规则,即专家经验。如图。
制定完之后,会形成一个模糊控制规则矩阵,然后根据模糊输入量按照相应的模糊推理算法完成计算,并决策出模糊输出量。 4.对输出模糊量的解模糊:模糊控制器的输出量是一个模糊集合,通过反模糊化方法判决出一个确切的精确量,反模糊化方法很多,我们这里选取重心法。 SIMULINK仿真图 在模糊控制器的输入和输出均有一个比例系数,我们叫它量化因子,它反映的是模糊论域范围与实际范围之间的比例关系,这里模糊控制器输入的论域范围均为[-6,6],假设误差的范围是[-10,10],误差变化率范围是[-100,100],控制量的范围是[-24,24],那么我们就可以算出量化因子分别为0.6,0.06,8。量化因子的选取对于模糊控制器的控制效果有很大的影响,当输出量化因子调为10控制效果更好。 仿真曲线 常规PID控制器和模糊控制器的比较 由仿真结果可见两种控制器对系统的各项性能指标都有了改进,常规PID还是有超调量,模糊控制器的超调量几乎为零。
模糊控制与传统PID控制比较
模糊控制 与传统PID控制比较
引言: 模糊控制不需要确定系统的精确数学模型,是一种基于规则的控制。模糊控制在智能控制领域由于理论研究比较成熟、实现相对比较简单、适应面宽而得到广泛的应用。不论是对复杂的水泥回转窑的控制,还是在智能化家用电器中的应用,模糊控制都充当着重要的角色。 一个典型工业过程通常可以等效为二阶系统加上一个非线性环节(如纯滞后),给出如下典型控制对象传递函数的一般形式: Gp(s)=K*e-τs/(T1s+1)(T2s+1) PID控制: PID控制是自动控制领域产生最早、应用最广的一种控制方法。 PID控制原理图:
PID控制器传递函数的一般表达式为: Gc(s)=kp+ki/s+kd*s kp为比例增益;ki为积分增益;kd为微分增益 控制器的关键是确定三个增益值,在simulink中搭建PID系统控制模型如下图示: PID仿真结果:
模糊控制: 模糊控制是运用语言归纳操作人员的控制策略,运用变量和模糊集合理论形成控制算法的一种控制。 模糊控制原理框图: 一个基本模糊控制器主要有三个功能: (1)模糊化:把精确量(如偏差e和偏差变化ec)转化为相应的模糊量(E、EC); (2)模糊推理:按总结的语言规则(模糊控制规则表)进行模糊推理; (3)模糊判决:把推理结果(U)从模糊量转化为可以用于实际控制的精确量(u) 模糊控制器的基本机构
设计模糊控制器主要步骤: 1.选择偏差e、偏差变化ec和控制量u的模糊语言变量为E、 EC和U。根据e、ec和u实际的基本论域,设定E、EC 和U论域都为[-6,6],可以确定出量化因子Ke、Kc和比例因子Ku。。 2.选取E、EC和U的各语言变量直,正大PB,正中PM,正小 PS,零ZE,负小NS,负中NM,负大NB,它们各自在论域上的模糊子集隶属度函数均为三角形, 3.根据总结的人工操作策略设计出模糊控制策略表: ek=yr-yk △ek=ek-ek-1
经典PID与模糊PID控制
经典 PID 与模糊 PID 控制 一、 PID 控制规律 控制输出由三部分组成: 比例环节——根据偏差量成比例的调节系统控制量 ,以此产生控制作用 , 减 少偏差。比例系数的作用是加快系统的响应速度 ,比例系数越大 ,系统响应速度越 快,系统的调节精度越高 , 但容易产生超调 , 甚至会导致系统的不稳定 ; 比例系数 过小,会降低系统调节精度 ,系统响应速度变慢 ,调节时间变长 ,系统动态、静态特 性变坏。比例控制是最简单的控制结构, 然而,它也能使系统满足某一方面的特 性要求,如 GM 、 PM 、稳态误差等。 积分环节——用于消除静差 , 提高系统的无差度。积分作用的强弱取决于积 分时间 常数 TI 的大小, TI 越小,积分作用越强。需要注意的是积分作用过强 , 可能引起系统的不稳定。 微分环节——根据偏差量的变化趋势调节系统控制量 , 在偏差信号发生较大 的变化 以前 , 提前引入一个早期的校正注意的是微分作用过强 , 可能引起系统的 振荡。 已知被控对象的数学模型: 二、经典 PID 设计 由于在设计 PID 控制器中要调整 3 个参数,根轨迹与波特图设计方法通常不 被直 接采用。 Ziegler 与 Nichols 发展了 PID 调节器设计方法。该方法基于简单 的稳定性分析方法。首先,置 K D K I 0,然后增加比例系数直至系统开始振 荡(即闭环系统极点在 jw 轴上)。再将该比例系数乘 0.6 ,其他参数按下式计算: K P 0.6K m K D K P Pi 4w m K I K P w m Pi 式中, K m 为系统开始振荡时的 K 值; w m 为振荡频率。然而,该设计方法在设计 过程中没有考虑任何特性要求。 但是 Ziegler 与 Nichols 发现这种设计方法给予 过程控制器提供了好的工作性能。 工程师们的多年实践经验证明, 这种设计方法 的确是一种好的方法。 G(s) 2s (s 1)(s 3)(s 4)
模糊PID控制
模糊P I D控制器在伺服系统中的应用 造车网2008年09月09日 0 引言 传统PID(比例、积分和微分)控制原理简单,使用方便,适应性强,可以广泛应用于各种工业过程控制领域。但是PID控制器也存在参数调节需要一定过程,最优参数选取比较麻烦的缺点,对一些系统参数会变化的过程,PID控制就无法有效地对系统进行在线控制。不能满足在系统参数发生变化时PID参数随之发生相应改变的要求,严重的影响了控制效果。本文介绍了基于车载伺服系统的模糊PID控制,它不需要被控对象的数学模型,能够在线实时修正参数,使控制器适应被控对象参数的任何变化。并对其进行仿真验证,结果表明模糊PID控制使系统的性能得到了明显的改善。 1 传统PID与模糊PID的比较 PID控制 PID控制器问世至今凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握、得不到精确的数学模型时,采用PID控制技术最为方便。PID控制器的参数整定是控制系统设计的核心。它是根据被控过程的特性来确定PID控制器的参数大小。PID控制原理简单、易于实现、适用面广,但PID控制器的参数整定是一件非常令人头痛的事。合理的PID参数通常由经验丰富的技术人员在线整定。在控制对象有很大的时变性和非线性的情况下,一组整定好的PID参数远远不能满足系统的要求。为此,引入了一套模糊PID控制算法。
模糊PID控制 所谓模糊PID控制器,即利用模糊逻辑算法并根据一定的模糊规则对PID控制的比例、积分、微分系数进行实时优化,以达到较为理想的控制效果。模糊PID控制共包括参数模糊化、模糊规则推理、参数解模糊、PID控制器等几个重要组成部分。计算机根据所设定的输入和反馈信号,计算实际位置和理论位置的偏差e以及当前的偏差变化ec,并根据模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制器的比例、积分、微分系数。 2 车载天线伺服系统 车载天线伺服系统的组成 车载天线系统由两部分组成:户外设备和户内设备。户外设备主要是天线伺服跟踪系统(包括平台、平台伺服跟踪系统、惯性传感器、GPS、卫星天线等);户内设备主要是控制器(包括各传感器接口、数据采集、控制器、卫星接收机等)和主控计算机,两者之间采用电缆连接,具有稳定跟踪和接收卫星信号的两大功能。 本系统采用德州仪器推出的TMS320LF2407A,与传统的单片机相比有巨大的优势。只需外加较少的硬件即可实现电机控制系统。本系统采用增量式光电码盘反馈转子的速度和磁极位置及初始位置。车载天线伺服系统模糊PID控制框图如图1所示。 图1 车载天线伺服系统模糊PID控制框图 车载天线伺服系统数学模型的确定 若电机的负载为常数且只输出电机转动的角速度,则得到直流伺服电机的传递函数如式(1)。
模糊PID控制
模糊PID控制器在伺服系统中的应用 造车网2008年09月09日 0 引言 传统PID(比例、积分和微分)控制原理简单,使用方便,适应性强,可以广泛应用于各种工业过程控制领域。但是PID控制器也存在参数调节需要一定过程,最优参数选取比较麻烦的缺点,对一些系统参数会变化的过程,PID控制就无法有效地对系统进行在线控制。不能满足在系统参数发生变化时PID参数随之发生相应改变的要求,严重的影响了控制效果。本文介绍了基于车载伺服系统的模糊PID控制,它不需要被控对象的数学模型,能够在线实时修正参数,使控制器适应被控对象参数的任何变化。并对其进行仿真验证,结果表明模糊PID控制使系统的性能得到了明显的改善。 1 传统PID与模糊PID的比较 1.1 PID控制 PID控制器问世至今凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握、得不到精确的数学模型时,采用PID控制技术最为方便。PID控制器的参数整定是控制系统设计的核心。它是根据被控过程的特性来确定PID控制器的参数大小。PID 控制原理简单、易于实现、适用面广,但PID控制器的参数整定是一件非常令人头痛的事。合理的PID参数通常由经验丰富的技术人员在线整定。在控制对象有很大的时变性和非线性的情况下,一组整定好的PID参数远远不能满足系统的要求。为此,引入了一套模糊PID控制算法。 1.2 模糊PID控制
所谓模糊PID控制器,即利用模糊逻辑算法并根据一定的模糊规则对PID控制的比例、积分、微分系数进行实时优化,以达到较为理想的控制效果。模糊PID 控制共包括参数模糊化、模糊规则推理、参数解模糊、PID控制器等几个重要组成部分。计算机根据所设定的输入和反馈信号,计算实际位置和理论位置的偏差e以及当前的偏差变化ec,并根据模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制器的比例、积分、微分系数。 2 车载天线伺服系统 2.1 车载天线伺服系统的组成 车载天线系统由两部分组成:户外设备和户内设备。户外设备主要是天线伺服跟踪系统(包括平台、平台伺服跟踪系统、惯性传感器、GPS、卫星天线等);户内设备主要是控制器(包括各传感器接口、数据采集、控制器、卫星接收机等)和主控计算机,两者之间采用电缆连接,具有稳定跟踪和接收卫星信号的两大功能。 本系统采用德州仪器推出的TMS320LF2407A,与传统的单片机相比有巨大的优势。只需外加较少的硬件即可实现电机控制系统。本系统采用增量式光电码盘反馈转子的速度和磁极位置及初始位置。车载天线伺服系统模糊PID控制框图如图1所示。 图1 车载天线伺服系统模糊PID控制框图 2.2 车载天线伺服系统数学模型的确定 若电机的负载为常数且只输出电机转动的角速度,则得到直流伺服电机的传
PID控制与模糊控制比较
PID控制与模糊控制的比较 专业:控制理论与控制工程 班级:级班 姓名:X X X 学号: xxxxxxxxxxxxxx
摘要:介绍了PID控制系统和模糊控制系统的工作原理。PID控制器结构简单,实现简单,控制效果良好,已经得到了广泛的应用。而模糊控制器相对复杂,但在许多的智能化家用电器中也得到了大量应用。但对于一个简单的系统来讲,哪一种控制方法更好,是不是越智能的控制就能得到越好的效果。 关键词:PID控制,模糊控制,比较
Abstract: Introduced the working principle of PID control system and fuzzy control system. PID controller structure is simple, implementation is simple, the control effect is good, has been widely used. And fuzzy controller is relatively complicated, but in a lot of intelligent household appliances also received a large number of applications. But for a simple system, which kind of control method is better, is weather the intelligent control can obtain the good effect. Key words: PID control, fuzzy control, compare
经典PID与模糊PID控制
) 4)(3)(1(2)(+++= s s s s s G 经典PID 与模糊PID 控制 一、PID 控制规律 控制输出由三部分组成: 比例环节——根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差。比例系数的作用是加快系统的响应速度,比例系数越大,系统响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳定;比例系数过小,会降低系统调节精度,系统响应速度变慢,调节时间变长,系统动态、静态特性变坏。比例控制是最简单的控制结构,然而,它也能使系统满足某一方面的特性要求,如GM 、PM 、稳态误差等。 积分环节——用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI 的大小, TI 越小,积分作用越强。需要注意的是积分作用过强,可能引起系统的不稳定。 微分环节——根据偏差量的变化趋势调节系统控制量,在偏差信号发生较大的变化以前,提前引入一个早期的校正注意的是微分作用过强,可能引起系统的振荡。 已知被控对象的数学模型: 二、经典PID 设计 由于在设计PID 控制器中要调整3个参数,根轨迹与波特图设计方法通常不被直接采用。Ziegler 与Nichols 发展了PID 调节器设计方法。该方法基于简单的稳定性分析方法。首先,置0==I D K K ,然后增加比例系数直至系统开始振荡(即闭环系统极点在jw 轴上)。再将该比例系数乘0.6,其他参数按下式计算: m P K K 6.0= m P D w Pi K K 4= Pi w K K m P I = 式中,m K 为系统开始振荡时的K 值;m w 为振荡频率。然而,该设计方法在设计过程中没有考虑任何特性要求。但是Ziegler 与Nichols 发现这种设计方法给予过程控制器提供了好的工作性能。工程师们的多年实践经验证明,这种设计方法的确是一种好的方法。
模糊规则的PID控制器设计(DOC)
模糊自整定PID控制器设计及仿真分析 摘要 针对常规PID控制不具有自适应能力,对于时变、非线性系统控制效果不佳。提出了将模糊技术与PID控制相结合的控制方式,设计出各种模糊控制器。论文的主要内容包括: 1.介绍模糊控制技术的背景和重大意义,了解常规PID控制中的优点与缺点。 2.了解模糊控制的数学基础。例如:模糊集合的定义、模糊语言、模糊推理、模糊变量的隶属函数、论域、量化因子、比例因子等。 3.掌握MATLAB中模糊工具箱、SIMULINK的使用及模糊控制器的设计方法,对于不同的控制系统设计出对应的模糊控制器的规则。 4.对混合式模糊PID控制器、开关式模糊PID控制器、自整定模糊PID控制器进行SIMULINK仿真。 MATLAB中模糊逻辑控制工具箱设计模糊控制器灵活、方便、可观性强,并可在SIMULINK环境中非常直观地构建各种复杂的模糊PID控制系统。仿真结果表明,模 糊PID控制具有控制灵活、超调小、响应快和适应性能强的优点。 关键词:模糊PID控制;MATLAB仿真;SIMULINK
Fuzzy Adaptive PID Controller Design and Simulation Analysis Abstract To the conventional PID control don’t have self-adaptive ,the control effect of time-varing and nonlinearity, We have already take the control method that combine fuzzy technology with PID control, and design various the fuzzy controller. The main contents of thesis is that: 1. Introduce the fuzzy control technology's background and great significance, understanding the advantages and disadvantages of the conventional PID control. 2. Understanding the mathematical basis of the fuzzy control, such as: the definition of fuzzy set, fuzzy language, fuzzy inference, membership function of fuzzy variables, treatise domain, quantifiable factor, scale factor and so on . 3. Master the use of the fuzzy toolbox, SIMULINK at MATLAB and the design of the fuzzy controller for different control system design the rules of the different fuzzy controller correspondingly. 4. Carry out SIMULINK simulation for the hybrid fuzzy controller, the switch fuzzy controller, and self-fuzzy controller. When a fuzzy logic control toolbox design fuzzy controller, it is very flexible、convenient and great observability in MATLAB, and it can construct various complex fuzzy PID control system directly in SIMULINK environment. The simulation results show that
模糊自适应PID控制器
模糊自适应PID控制器 的设计
模糊自适应PID 控制器的设计 一、 模糊自适应原理 模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机控制方法,作为智能控制的一个重要分支,在控制领域获得了广泛应用,模糊控制与传统控制方式相比具有以下突出优点: ·不需要精确的被控对象的数学模型; ·使用自然语言方法,控制方法易于掌握; ·鲁棒性好,能够较大范围的适应参数变化; ·与常规PID 控制相比,动态响应品质优良。 常规模糊控制器的原理如图1所示: 图1 模糊控制系统框图 PID 控制规律: 1 01()[()()()] p D I d u t k e t e t dt T e t T dt =++? 式中:p k ---比例系数; I T ---积分时间常数; D T ---微分时间常数。 在工业生产中过程中,许多被控对象随着负荷变化或干扰因素影响,其对象特性参数或结构发生改变。自适应控制运用现代控制理论在线辨识对象特征参 数,实时改变其控制策略,使控制系统品质指标保持在最佳范围内,但其控制效果的好坏取决于辨识模型的精确度,这对于复杂系统是非常困难的。因此,在工业生产中过程中,大量采用的仍然是PID 算法,PID 参数的整定方法很多,但大多数都以对象特性为基础。 随着计算机技术的以展,人们利用人工智能的方法将操作人员的调整经验作为知识存入计算机中,根据现场实际情况,计算机能自动调整PID 参数,这样就出现了智能PID.这种控制器把古典的PID 控制与先进的专家系统相结合,实现系统的最佳控制。这种控制必须精确地确定模型,首先将操作人员长期实践积累
模糊PID控制器的鲁棒性研究外文文献翻译
毕业设计(论文)外文文献译文及原文 基于模控制的模糊PID参数的整定 Xiao-Gang Duan, Han-Xiong Li,and Hua Deng
School of Mechanical and Electrical Engineering, Central South UniVersity, Changsha 410083, China, and Department of Manufacturing Engineering and Engineering Management, City UniVersity of Hong Kong, Hong Kong 摘要:在本文中将利用模控制的整定方法实现模糊PID控制。此种控制方式首次应用于模糊PID控制器,它包括一个线性PID控制器和非线性补偿部分。非线性补偿部分可视为一个干扰过程,模糊PID 控制器的参数可在分析的基础上确定模结构。模糊PID控制系统利用亚谱诺夫稳定性理论进行稳定性分析。仿真结果表明利用模控制整定模糊PID控制参数是有效的。 1引言 一般而言,传统的PID控制器对于十分复杂的被控对象控制效果不太理想, 如高阶时滞系统。在这种复杂的环境下, 众所周知,模糊控制器由于其固有的鲁棒性可以有更好的表现,因此,在过去30年中,模糊控制器,特别是,模糊PID控制器因其对于线性系统和非线性系统都能进行简单和有效的控制,已被广泛用于工业生产过程[1-4]。模糊PID控制器有多种形式[5],如单输入模糊PID控制器,双输入模糊PID控制器和三个输入的模糊PID控制器。一般情况下,没有统一的标准。单输入可能会丢失派生信息, 三输入模糊PID控制器会产生按指数增长的规则。在本文中所采用的双输入模糊PID控制器有一个适当的结构并且实用性强,因此在各种研究和应用中,是最流行的模糊PID 类型。尽管业界对于应用模糊PID有越来越大的兴趣,但从控制工程的主流社会的角度来看,它仍然是一个极具争议的话题。原因之一是模糊PID参数整定的基本理论分析方法至今仍不明确。因此,模糊PID控制器不得不进行两个级别的整定。在较低层次上,该整定是由调整增益获得线性控制性能。在更高层次上的
模糊PID控制问题
Fuzzy - simulink有关模糊PID问题概述 最近很多人问我关于模糊PID的问题,我就把模糊PID的问题综合了一下,希望对大家有所帮助。 一、模糊PID就是指自适应模糊PID吗? 不是,通常模糊控制和PID控制结合的方式有以下几种: 1、大误差范围内采用模糊控制,小误差范围内转换成PID控制的模糊PID开关切换控制。 2、PID控制与模糊控制并联而成的混合型模糊PID控制。 3、利用模糊控制器在线整定PID控制器参数的自适应模糊PID控制。 一般用1和3比较多,MATLAB自带的水箱液位控制tank采用的就是开关切换控制。由于自适应模糊PID控制效果更加良好,而且大多数人选用自适应模糊PID控制器,所以在这里主要指自适应模糊PID控制器。 二、自适应模糊PID的概念 根据PID控制器的三个参数与偏差e和偏差的变化ec之间的模糊关系,在运行时不断检测e及ec,通过事先确定的关系,利用模糊推理的方法,在线修改PID控制器的三个参数,让PID参数可自整定。就我的理解而言,它最终还是一个PID控制器,但是因为参数可自动调整的缘故,所以也能解决不少一般的非线性问题,但是假如系统的非线性、不确定性很严重时,那模糊PID的控制效果就会不理想啦。 三、模糊PID控制规则是怎么定的? 这个控制规则当然很重要,一般经验: (1)当e较大时,为使系统具有较好的跟踪性能,应取较大的Kp 与较小的Kd,同时为避免系统响应出现较大的超调,应对积分作用加以限制,通常取Ki=0。 (2)当e处于中等大小时,为使系统响应具有较小的超调,Kp应取得小些。在这种情况下,Kd的取值对系统响应的影响较大,Ki的取值要适当。 (3)当e较小时,为使系统具有较好的稳定性能,Kp与Ki均应取得大些,同时为避免系统在设定值附近出现振荡,Kd值的选择根据|ec|值较大时,Kd取较小值,通常Kd为中等大小。 另外主要还得根据系统本身的特性和你自己的经验来整定,当然你先得弄明白PID三个参数Kp,Ki,Kd各自的作用,尤其对于你控制的这个系统。 四、量化因子Ke,Kec,Ku该如何确定? 有个一般的公式:Ke=n/e(max),Kec=m/ec(max),Ku=u(max)/l。n,m,l分别为Ke,Kec,Ku的量化等级,一般可取6或7。e(max),ec(max),u(max)分别为误差,误差变化率,控制输出的论域。不过通过我实际的调试,有时候这些公式并不好使。所以我一般都采用凑试法,根
模糊PID控制器
摘要: 本论文揭示了关于最简单模糊PID控制器的数学模型,最简单模糊PID控制器是采用两个分别拥有三个输入变量的模糊集和四个拥有输出变量的模糊集。数学模型是通过包括每个输入变量的左、右梯形隶属函数,输出变量单一或三角隶属函数,代数产品三角模,三方共同规范和推理方法的不同组合以及COS(center of sums)去模糊方法得到的。对于这些结构性能的研究是为了审查其是否适合控制应用程序,由于这些结构是适合于控制的,所以有界输入输出(BIBO)的稳定性得到了证实。最后本文给出了模糊PID控制器的设计途径,一切数值例子包括其模拟技术成果用以证明最简单模糊PID控制器的效力。 关键词 模糊PID控制器数学模型代数产品三角模BIBO稳定性 1简介 常规(线性)PID控制器由于其操作简单,成本低,对线性系统的有效性而被广泛用于工业。到目前为止关于PID控制的四种不同配置筹措已揭示,如图1所示.。由于其线性结构,常规PID控制器通常无效如果程序需要较高秩序和时滞系统,非线性系统,缺少精确数学模型的复杂模糊系统以及不确定系统。据观察,模糊PI和模糊PD控制器可以处理上述系统且优于它们的常规对应。模糊PD控制器无法消除稳态误差,模糊PI控制器在瞬态阶段高阶进程中表现不佳,要获得全面的性能提升,模糊PID控制器当为首选。 常规PID控制器参数的调整运用被认为是经典的调节技术。这些控制器运用模糊矩阵等到了进一步的调整以便能在闭环系统中获得更好的瞬态和稳态行为性能。一个首先采用Ziegler-Nichols-like 转变方程参数,继而运用联机模糊推理机制的自整PID控制方案已经提出,为了规范工业生产。使用联机模式识别方法和模糊推理,一个调整级联PID控制器的专家级监管控制系统已实现。为了提高从PID控制器获得的闭环性能,模糊监督PID控制器引入了[ 6 ] 。监督技术主要包括在每年年底瞬态响应的基础上调整PID参数,以及上升时间,超调与稳定因素组成的价值。基于模糊逻辑对调整PID控制器不同方法的比较已经提出。遵循从Zeigler-Nichols参数中取得性能提升的模糊机制已将不同控制结构纳入考虑。通过不同基于逻辑方法带有典型模糊类PID协商控制器模糊集,以
经典PID与模糊PID控制
经典PID与模糊PID控制 一、PID控制规律 控制输出由三部分组成: 比例环节一一根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差。比例系数的作用是加快系统的响应速度,比例系数越大,系统响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳定;比例系数过小,会降低系统调节精度,系统响应速度变慢,调节时间变长,系统动态、静态特性变坏。比例控制是最简单的控制结构,然而,它也能使系统满足某一方面的特性要求,如GM PM稳态误差等。 积分环节一一用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI的大小,TI越小,积分作用越强。需要注意的是积分作用过强,可能引起系统的不稳定。 微分环节一一根据偏差量的变化趋势调节系统控制量,在偏差信号发生较大的变化以前,提前引入一个早期的校正注意的是微分作用过强,可能引起系统的振荡。 已知被控对象的数学模型: G(s)二2s (s 1)(s 3)(s 4) 二、经典PID设计 由于在设计PID控制器中要调整3个参数,根轨迹与波特图设计方法通常不被直接采用。Ziegler与Nichols发展了PID调节器设计方法。该方法基于简单的稳定性分析方法。首先,置K D二? =0,然后增加比例系数直至系统开始振荡(即闭环系统极点在jw轴上)。再将该比例系数乘0.6,其他参数按下式计算: K P =0.6K m K D二K p Pi.4w m K I二K p W m.. Pi 式中,K m为系统开始振荡时的K值;W m为振荡频率。然而,该设计方法在设计过程中没有考虑任何特性要求。但是Ziegler与Nichols发现这种设计方法给予过程控制器提供了好的工作性能。工程师们的多年实践经验证明,这种设计方法的确是一种好的方法。
模糊PID控制器设计
第3章模糊PID智能控制算法设计 PID控制是工业过程中应用最广泛的、常规控制中最基本的控制方法,具有结构简单、易于实现、不依赖于系统精确的模型的优点。但是当其用到复杂控制系统时,难以取得理想的控制效果,甚至会导致系统不稳定。智能控制具有学习能力、对变化环境的适应能力以及自组织协调能力,能够应用到复杂系统的控制中。因此,将智能控制方法和常规PID控制方法结合起来,可以充分发挥两种方法的优点,提高控制系统的整体性能。 常规PID控制的参数是固定的,在广义被控对象发生变化时,其自身参数不能根据变化做出相应的调整。针对这一问题,已有研究者提出能自校正的PID 控制方法。但是在系统非线性的情况下,实现自校正相当困难。因而需要设计一种PID参数自适应的控制方法,在对象发生变化时,其参数能进行动态调整。采用智能控制方法对自适应PID的参数进行优化,将优化的参数送到控制器,将可以很好的弥补传统PID的缺陷,达到良好的控制效果,智能自适应PID控制应运而生[1]。 PID控制系统的参数分为比例、积分、微分系数和PID控制器的参考值两个方面,因此改变PID参数也有改变比例、积分、微分系数和改变PID回路的参考值两种方法。通常的自适应PID控制是采用前一种方法,对于被控对象的模型的改变,通过调整比例、积分、微分系数来调整三种作用的强弱,从而来适应变化。这类控制方法中最具代表性的是模糊自适应PID控制方法。 模糊自适应PID控制是用模糊控制来适时调整PID参数的方法,其主要思想是结和工程设计人员的技术知识和实际操作经验,建立合适的模糊规则,通过推理得到比例、积分、微分三个整定参数。由于一维模糊控制精度不够,而三维模糊控制计算过于麻烦,通常情况下采用二维模糊控制方法实现参数整定。具体的方法是通过计算当前系统误差及误差变化率得到模糊控制的输入,利用模糊规则进行模糊推理,查询模糊规则表进行参数调整。参数的调整包括极性和大小两个方面。同时,系统要求辨识机构能够提供足够的系统信息,且保证模糊自整定PID有较为广泛的控制空间。模糊规则的设计要保证系统满足快速响应、无静差的要求
模糊-PID控制
第五章 交流伺服系统控制方式 5.1 PID 控制简介 PID 控制器具有通用性强与鲁棒性好的特点,所以在己有的各种控制手段中,它仍然占有重要地位。常规 PID 控制器系统原理框图如图5-2 所示,系统主要由 PID 控制器和被控对象组成。 PID 控制器原理框图 PID 控制器是一种线性控制器,它根据给定值和实际输出值构成控制偏差,将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。其控制规律为: ?++=t D I p dt t de T dt t e T t e K t u 0])()(1 )([)( 式中:e(t)=r(t)-c(t) ,p K 为比例系数,I T 为积分时间常数,D T 为微分时间常数。 由于计算机的发展,实际应用中大多数采用数字 PID 控制器,数字 PID 控制算法又分为位置式 PID 控制算法和增量式 PID 控制算法。在这两种算法中,增量式 PID 有较大的优点: (1) 由于计算机输出增量,所以误动作时影响小。 (2) 手动/自动切换时冲击小,便于实现无扰动切换。此外,当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故能仍然保持原值。 (3) 算式中不需要累加。控制增量的确定仅与最近K 次的采样值有关。 所谓增量式PID 是指数字控制器的输出只是控制量的增量)(t u ?。当执行机构需要的是控制量的增量时,可由式导出提供增量的PID 控制算式。根据递推原理可得式 ∑=--++=k j D j p k e k e K j e K k e K k u 0)]1()([)()()( ∑-=---++-=-1 0)]2()1([)()1()1(k j D F p k e k e K j e K k e K k u 用6.8减6.9,可得 )] 1()([)()()] 2()1(2)([)()]1()([)(-?-?++?=-+--++--=?k e k e K k e K k e K k e k e k e K k e K k e k e K k u D I P D F p 式中:)1()()(--=?k e k e k e